Tema 6: Funciones de varias variablesemmanuel.jean.briand.free.fr/docencia/CIN2016/Tema6.pdf ·...
8
Tema 6: Funciones de varias variables 2 de febrero de 2016 Preliminares: derivadas parciales. Sea F una función de dos variables, como por ejemplo la función definida por F( x; y)= x 2 y 3 Podemos derivarla con respecto a x, considerando en este cálculo la variable y como constante. Para cualquiera constante c, la deri- vada de cx 2 es 2cx. Por tanto, la derivada con respecto a x de F es 2y 3 x (utilizar c = y 3 ). Notamos: ∂ F ∂x ( x; y)= 2y 3 x. Es la derivada parcial de F con respecto a x. Podemos derivar también F con respecto a y, considerando en este cálculo la variable x como constante. Para cualquiera constan- te c, la derivada de cy 3 (con respecto a la variable y) es 3cy 2 . Por tanto, la derivada con respecto a y de F es 3x 2 y 2 (utilizar c = x 2 ). Notamos: ∂ F ∂y ( x; y)= 3x 2 y 2 . Es la derivada parcial de F con respecto a y. Las derivadas parciales de F son nuevas funciones, que pueden ser evaluadas en diferentes puntos, Por ejemplo, las derivadas parciales de F en el punto (5; 3) son: ∂ F ∂x (5; 3)= 270, ∂ F ∂y (5; 3)= 775. Podemos calcular, en su turno, las derivadas parciales de las derivadas parciales de F. Se nota: ∂ 2 F ∂x 2 para ∂ ∂F ∂x ∂x , ∂ 2 F ∂y∂x para ∂ ∂F ∂x ∂y , ∂ 2 F ∂x∂y para ∂ ∂F ∂y ∂x , ∂ 2 F ∂y 2 para ∂ ∂F ∂y ∂y . En el ejemplo anterior, el de F( x; y)= x 2 y 3 , obtenemos ∂ 2 F ∂x 2 ( x; y)= 2y 3 , ∂ 2 F ∂y∂x = 6xy 2 , ∂ 2 F ∂x∂y = 6xy 2 , ∂ 2 F ∂y 2 = 6x 2 y. Repasos sobre funciones de una variable. Función de una variable. Una función f de una variable tiene como conjunto de salida algún subconjunto Ω de R y como conjunto de llegada R. El con- junto Ω se llama dominio de la función f . La función asocia a cada elemento x de Ω un elemento de R. Es el elemento notado f ( x).
-
Upload
nguyencong -
Category
Documents
-
view
224 -
download
0
Transcript of Tema 6: Funciones de varias variablesemmanuel.jean.briand.free.fr/docencia/CIN2016/Tema6.pdf ·...

Tema 6: Funciones de varias variables2 de febrero de 2016
Preliminares: derivadas parciales.
Sea F una función de dos variables, como por ejemplo la funcióndefinida por
F(x; y) = x2 y3
Podemos derivarla con respecto a x, considerando en este cálculola variable y como constante. Para cualquiera constante c, la deri-vada de cx2 es 2cx. Por tanto, la derivada con respecto a x de F es2y3x (utilizar c = y3). Notamos:
∂F∂x
(x; y) = 2y3x.
Es la derivada parcial de F con respecto a x.Podemos derivar también F con respecto a y, considerando en
este cálculo la variable x como constante. Para cualquiera constan-te c, la derivada de cy3 (con respecto a la variable y) es 3cy2. Portanto, la derivada con respecto a y de F es 3x2y2 (utilizar c = x2).Notamos:
∂F∂y
(x; y) = 3x2y2.
Es la derivada parcial de F con respecto a y.Las derivadas parciales de F son nuevas funciones, que pueden
ser evaluadas en diferentes puntos, Por ejemplo, las derivadasparciales de F en el punto (5; 3) son:
∂F∂x
(5; 3) = 270,∂F∂y
(5; 3) = 775.
Podemos calcular, en su turno, las derivadas parciales de lasderivadas parciales de F. Se nota:
∂2F∂x2 para
∂ ∂F∂x
∂x,
∂2F∂y∂x
para∂ ∂F
∂x∂y
,
∂2F∂x∂y
para∂ ∂F
∂y
∂x,
∂2F∂y2 para
∂ ∂F∂y
∂y.
En el ejemplo anterior, el de F(x; y) = x2y3, obtenemos
∂2F∂x2 (x; y) = 2y3,
∂2F∂y∂x
= 6xy2,∂2F
∂x∂y= 6xy2,
∂2F∂y2 = 6x2y.
Repasos sobre funciones de una variable.
Función de una variable.
Una función f de una variable tiene como conjunto de salidaalgún subconjunto Ω de R y como conjunto de llegada R. El con-junto Ω se llama dominio de la función f . La función asocia a cadaelemento x de Ω un elemento de R. Es el elemento notado f (x).

tema 6: funciones de varias variables 2
La notación f : Ω −→ R significa precisamente que f es unafunción de Ω en R (es decir: con dominio Ω y conjunto de llegadaR).
Gráfica. La gráfica de f es el conjunto de los pares (x; y) tal quex ∈ Ω, y ∈ R e y = f (x). Si f es una función continua, su gráfica esuna curva del plano.
Entorno. Decimos que un subconjunto Ω de R es un entorno delpunto x0 ∈ R si Ω contiene un intervalo abierto (a; b) que contiene,en su turno, x0:
x0 ∈ (a; b) ⊂ Ω.
Derivada. Sea Ω ⊂ R y x0 ∈ R tal que Ω sea un entorno de x0. Sea
f : Ω −→ R
Decimos que f es derivable en x0 si existe una aplicación linealx 7→ αx + β que aproxima mejor a f que todas las otras aplica-ciones lineales x 7→ ax + b, cerca de x0. Más explicitamente: si paracualesquiera a y b, hay un entorno I de x0 (contenido en Ω) tal quepara cualquier x ∈ I,
| f (x)− (αx + β)| ≤ | f (x)− (ax + b)|
En este caso, se tiene necesariamente que esta mejor aproximaciónlineal es dada por
αx + β = f (x0) + f ′(x0)(x− x0)
donde
f ′(x0) = lımx→x0
f (x)− f (x0)x− x0
es la derivada de f en x0.
Aproximación de Taylor de orden 1. Se tiene, por tanto, cerca dex0, la aproximación:
f (x) ≈ f (x0) + f ′(x0)(x− x0).
Es la aproximación de Taylor de orden 1.
Recta tangente. Gráficamente, f es derivable en x0 si su gráficatiene, cerca del punto (x0; f (x0)), una única linea (no–vertical) quemejor la aproxima. En este caso, esta recta es la tangente a la gráficaen (x0; f (x0)) y admite como ecuación:
y = f (x0) + f ′(x0)(x− x0).
La derivada f ′(x0) es la pendiente de esta tangente.
Extremos absolutos. Sea Ω ⊂ R, sea A ⊂ Ω y sea x0 ∈ A. Sea
f : Ω −→ R

tema 6: funciones de varias variables 3
Decimos que f admite un máximo absoluto sobre A en x0 si f (x0) ≥f (x) para cualquier x ∈ A. Es un máximo absoluto estricto si ladesigualdad es estricta: f (x0) > f (x) para cualquier x ∈ A distintode x0.
Se definen de manera análoga: mínimo absoluto, mínimo absolutoestricto. Los extremos absolutos de f son sus máximos y sus mínimos.
Extremos locales. Supongamos ahora que Ω es un entorno de x0.Decimos que f admite un máximo local en x0 si existe un entorno Ide x0, contenido en Ω, tal que f (x0) ≥ f (x) para cualquier x ∈ I.Es un máximo local estricto si existe un entorno I de x0 donde ladesigualdad sea estricta: f (x0) ≥ f (x) para cualquier x ∈ I distintode x0.
Se define de manera análoga: mínimo local y mínimo local estricto.Los extremos locales de f son sus máximos locales y mínimos locales.
Teorema 1. Si f es derivable en x0 y admite un extremo local en x0,entonces f ′(x0) = 0.
Un punto x0 tal que f ′(x0) = 0 se llama un punto crítico de f .Ojo: no todos los puntos críticos de f corresponden a extremoslocales.
Clasificación de los puntos críticos. Si f admite un desarrollode Taylor al orden 2 en x0,
f (x) ≈ f (x0) + f ′(x0)(x− x0) +f ′′(x0)
2(x− x0)2
y que x0 es un punto crítico para f (es decir, f ′(x0) = 0), obtenemosla aproximación
f (x) ≈ f (x0) +f ′′(x0)
2(x− x0)2
que nos permite hacer un estudio más fino del punto crítico. Enefecto, para x cerca de x0, vemos que f (x)− f (x0) tiene el signo def ′′(x0) (si no se cancela esta cantidad). Nos da:
Teorema 2. Sea f una función definida en un entorno de x0, derivabletres veces en un entorno x0. Supongamos que x0 es un punto crítico de f .Entonces:
Si f ′′(x0) > 0, entonces f admite un mínimo local en x0.
Si f ′′(x0) < 0, entonces f admite un máximo local en x0.
Puede ocurrir que f ′′(x0) = 0: el teorema no permite concluir enaquel caso.
Funciones de dos variables
Consideramos ahora funciones F : Ω −→ R cuyo dominio Ωes un subconjunto del plano R2. Sus argumentos son, por tanto,
tema 6: funciones de varias variables 4
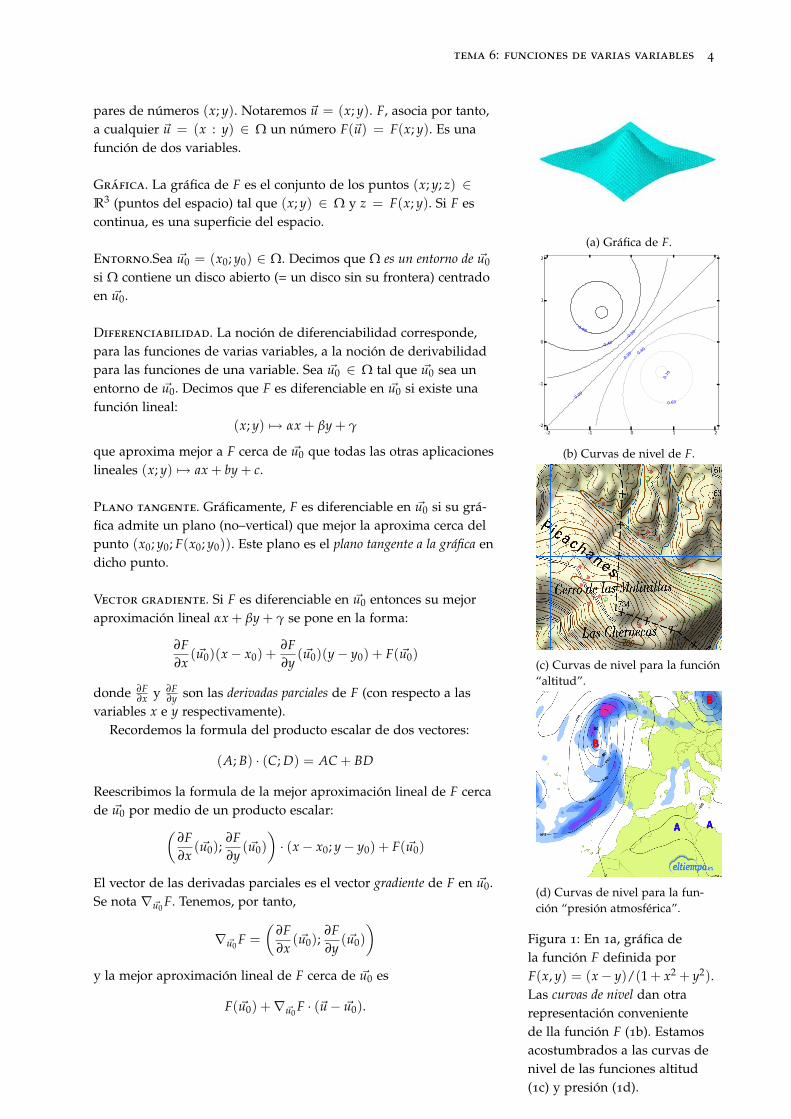
pares de números (x; y). Notaremos ~u = (x; y). F, asocia por tanto,a cualquier ~u = (x : y) ∈ Ω un número F(~u) = F(x; y). Es unafunción de dos variables.
Gráfica. La gráfica de F es el conjunto de los puntos (x; y; z) ∈R3 (puntos del espacio) tal que (x; y) ∈ Ω y z = F(x; y). Si F escontinua, es una superficie del espacio.
Entorno.Sea ~u0 = (x0; y0) ∈ Ω. Decimos que Ω es un entorno de ~u0
si Ω contiene un disco abierto (= un disco sin su frontera) centradoen ~u0.
(a) Gráfica de F.
-2 -1 0 1 2
-2
-1
0
1
2
0.00
0.20
-0.2
0
0.40-0.40
0.60
-0.60
0.70
(b) Curvas de nivel de F.
(c) Curvas de nivel para la función“altitud”.
(d) Curvas de nivel para la fun-ción “presión atmosférica”.
Figura 1: En 1a, gráfica dela función F definida porF(x, y) = (x− y)/(1 + x2 + y2).Las curvas de nivel dan otrarepresentación convenientede lla función F (1b). Estamosacostumbrados a las curvas denivel de las funciones altitud(1c) y presión (1d).
Diferenciabilidad. La noción de diferenciabilidad corresponde,para las funciones de varias variables, a la noción de derivabilidadpara las funciones de una variable. Sea ~u0 ∈ Ω tal que ~u0 sea unentorno de ~u0. Decimos que F es diferenciable en ~u0 si existe unafunción lineal:
(x; y) 7→ αx + βy + γ
que aproxima mejor a F cerca de ~u0 que todas las otras aplicacioneslineales (x; y) 7→ ax + by + c.
Plano tangente. Gráficamente, F es diferenciable en ~u0 si su grá-fica admite un plano (no–vertical) que mejor la aproxima cerca delpunto (x0; y0; F(x0; y0)). Este plano es el plano tangente a la gráfica endicho punto.
Vector gradiente. Si F es diferenciable en ~u0 entonces su mejoraproximación lineal αx + βy + γ se pone en la forma:
∂F∂x
(~u0)(x− x0) +∂F∂y
(~u0)(y− y0) + F(~u0)
donde ∂F∂x y ∂F
∂y son las derivadas parciales de F (con respecto a lasvariables x e y respectivamente).
Recordemos la formula del producto escalar de dos vectores:
(A; B) · (C; D) = AC + BD
Reescribimos la formula de la mejor aproximación lineal de F cercade ~u0 por medio de un producto escalar:(
∂F∂x
(~u0);∂F∂y
(~u0))· (x− x0; y− y0) + F(~u0)
El vector de las derivadas parciales es el vector gradiente de F en ~u0.Se nota ∇~u0
F. Tenemos, por tanto,
∇~u0F =
(∂F∂x
(~u0);∂F∂y
(~u0))
y la mejor aproximación lineal de F cerca de ~u0 es
F(~u0) +∇~u0F · (~u− ~u0).

tema 6: funciones de varias variables 5
Aproximación de Taylor de orden 1. Para una función de unavariable, la aproximación de Taylor de orden 1 de f cerca de x0 era
f (x) ≈ f (x0) + f ′(x0)(x− x0).
Para una función de dos variables, la aproximación de Taylor deorden 1 de F cerca de ~u0 es
F(~u) ≈ F(~u0) +∇~u0F · (~u− ~u0).
Figura 2: Gráfica la funciónF definida por F(x, y) =(x − y)/(1 + x2 + y2), con unode sus planos tangentes.
Ecuación del plano tangente en (x0; y0; F(x0; y0)). Para unafunción de una variable, la ecuación de la recta tangente a la gráficade f en (x0; f (x0)) era
y = f (x0) + f ′(x0)(x− x0).
Para una función de dos variables, la ecuación del plano tangente ala gráfica de F en (x0; y0; F(x0 : y0)) es
z = F(~u0) +∇~u0f · (~u− ~u0).
Extremos locales
Definiciones. Se definen los máximos, mínimos, extremos, localeso absolutos, estrictos o no, de las funciones de dos variables, comopara las funciones de una sola variable.
Puntos críticos. Los resultados sobre extremos locales de fun-ciones de una variable se extienden de la manera siguiente, parafunciones de dos variables.
Teorema 3. Si F es diferenciable en ~u0 y admite un extremo local en ~u0,entonces ∇~u0
f = (0; 0).
Nótese que la cancelación del gradiente es equivalente a la cance-lación simultánea de las dos derivadas parciales:
∇~u0f = (0; 0) ⇔
∂F∂x (~u0) = 0,∂F∂y (~u0) = 0.
Un punto ~u0 tal que ∇~u0F = (0; 0) se llama un punto crítico de
F. Ojo: no todos los puntos críticos de F corresponden a extremoslocales.
Clasificación de los puntos críticos. El teorema de clasificaciónde puntos críticos para funciones de dos variables es el siguiente.
Teorema 4. Sea F una función definida en un entorno de ~u0, que admitederivadas parciales de orden 2 en un entorno de ~u0. Supongamos que ~u0 esun punto crítico de F. Sea
H =
∂2F∂x2 (~u0) ∂2F
∂x∂y (~u0)∂2F
∂y∂x (~u0) ∂2F∂y2 (~u0)
Es la matriz hessiana de F en ~u0.

tema 6: funciones de varias variables 6
Si det H > 0, y los coeficientes en la diagonal de H son estrictamentepositivos, entonces F admite un mínimo local en ~u0.
Si det H > 0, y los coeficientes en la diagonal de H son estrictamentenegativos, entonces F admite un máximo local en ~u0.
Si det H < 0, entonces F no admite ni máximo local, ni mínimo localen ~u0, pero tiene un punto de silla en ~u0: es un punto que tiene, encualquier de sus entornos, puntos ~u tal que F(~u) > F(~u0) como puntos~u tal que F(~u) < F(~u0).
En los otros casos el teorema no permite concluir.(a) Máximo local estricto.
(b) Mínimo local estricto.
(c) Punto de silla.
Figura 3: Los tres tipos genéri-cos de puntos críticos para unafunción de dos variables.
Ejemplo 1. Los ejemplos más simples de aplicación de este teorema,que conviene recordar son: F(x, y) = x2 + y2 (mínimo local en (0; 0)),F(x, y) = −(x2 + y2) (máximo local en (0; 0)), y F(x, y) = xy (puntosilla en (0; 0)).
Ejemplo 2. Consideremos la función f definida por f (x, y) = y− xy yclasifiquemos sus puntos críticos. Para ello, calculamos
∂ f∂x
(x, y) = −y∂ f∂y
(x, y) = 1− x
Por tanto, ∂ f∂x
(x, y) = 0∂ f∂y
(x, y) = 0⇔
y = 0x = 1
Por tanto, f tiene un único punto crítico, es (1; 0). La matriz hessiana def en (x; y) es: (
0 −1−1 0
)La matriz hessiana de f en el punto crítico (1; 0) es la misma. Su deter-minante es negativo (vale −1): el punto (1; 0) es un punto de silla paraf .
Derivada direccional
Dada una función F de dos variables x, y, con dominio Ω, unpunto ~u0 = (x0; y0) en Ω tal que Ω sea un entorno de ~u0, y unadirección definida por un vector ~v = (a, b), definimos una nuevafunción, de una sola variable t, por
f (t) = F(~u0 + t~w)
donde ~w es el vector ~v normalizado: ~w = 1||~v||v = 1√
a2+b2 (a; b).La derivada direccional de F en el punto ~u0 en la dirección indicada por
el vector ~v es f ′(0). La denotaremos D~vF(~u0). Tiene las propiedadessiguientes.

tema 6: funciones de varias variables 7
Teorema 5.
Las derivadas parciales de F son sus derivadas direccionales en lasdirecciones indicadas por (1; 0) y (0; 1):
∂F∂x
(~u0) = D(1;0)F(~u0),∂F∂y
(~u0) = D(0;1)F(~u0).
Más generalmente, la derivada direccional es dada por el productoescalar siguiente
D~vF(~u0) = ∇~u0F · ~w
donde ~w es el vector unitario obtenido de ~v por normalización: ~w =1||~v||~v.
-2 -1 0 1 2
-2
-1
0
1
2
0.00
0.20
-0.2
0
0.40-0.40
0.60
-0.60
0.70
(a) Curvas de nivel.
-2 -1 0 1 2
-2
-1
0
1
2
(b) Vectores gradiente.
-2 -1 0 1 2
-2
-1
0
1
2
0.00
0.20
-0.2
0
0.40-0.40
0.60
-0.60
0.70
(c) Curvas de nivel y vectoresgradiente juntos.
Figura 4: Curvas de nively vectores gradiente parala función f definida porf (x, y) = (x− y)/(1 + x2 + y2).Se ven un máximo local (alcuál apuntan los vectores gra-dientes) y un mínimo local(del cuál huyen). Se apreciaque los vectores gradientes sonortogonales a las curvas denivel.
Ejemplo 3. Calcular la derivada direccional de la función F definida porF(x, y) = x2y, en el punto ~u0 = (1, 2), en la dirección indicada por elvector ~v = (1, 1).
Tenemos que ||~v|| =√
12 + 12 =√
2. El vector unitario ~w que indicala misma dirección es
~w =1||~v||~v =
(1√2
,1√2
).
El gradiente de F es ∇(x,y)F = (2xy; x2). El gradiente de F en ~u0 =(1, 2) es, por tanto, ∇~u0
F = (4; 1). Por consiguiente,
D~vF((1, 2)) = ∇~u0F · w = (4; 1) ·
(1√2
,1√2
)= 5/
√2.
Podemos calcular la misma derivada direccional con la definición. Paraesto, ponemos f (t) = F(~u0 + t~w). Entonces,
f (t) = F((1; 2) + t(1/√
2; 1/√
2))
= F(1 + t/√
2, 2 + t/√
2) = (1 + t/√
2)2(2 + t/√
2)
Derivamos con respecto a t, obteniendo
f ′(t) =2√2(1 + t/
√2)(2 + t/
√2) + (1 + t/
√2)2 1√
2
Para t = 0 obtenemos:
D~vF((1, 2)) = f ′(0) =2√2× 2 +
1√2
= 5/√
2.
Teorema 6. Consideramos todas las derivadas direccionales de F en unpunto ~u0. Entonces:
Tienen un máximo en la dirección indicada por el gradiente ∇~u0F.
Tienen un mínimo en la dirección indicada por −∇~u0F.
Se cancelan en las direcciones ortogonales al gradiente: si ~v es ortogonala ∇~u0
F entonces D~vF(uo) = 0.
El gradiente dirige, por tanto, en cada punto, la linea de máximopendiente en la gráfica de la función, indicando “el sentido de lasubida”.

tema 6: funciones de varias variables 8
Funciones de más de dos variables.
Podemos considerar igualmente funciones de n variables, paracualquier n ≥ 1. Son funciones del tipo F : Ω −→ R cuyo dominioΩ es un subconjunto del espacio Rn, que asocian a cada vector ~u =(x1, x2, . . . , xn) un número F(~u) = F(x; y). Indicamos brevementecomo se generalizan los conceptos introducidos para funciones dedos variables.
Gráfica. La gráfica de F es el conjunto de los puntos (x1; x2; . . . ; xn; z) ∈Rn+1 tal que (x1; x2; . . . ; xn) ∈ Ω y z = F(x1; x2; . . . ; xn). Resulta im-posible la representación visual de espacios de mayor dimensiónpor nuestras propias limitaciones físicas. Sin embargo es relevanteseguir usando el lenguaje y la intuición geométrica en tales espa-cios. Así, si F es continua, la gráfica de F es una hipersuperficie deRn+1. Si, además, F es diferenciable, esta gráfica admite hiperplanostangentes.
Diferenciabilidad. la función F es diferenciable en ~u0 si admitecerca de ~u0 una mejor aproximación lineal. Esta mejor aproxima-ción lineal es necesariamente de la forma
F(~u) ≈ F(~u0) +∇~u0F · (~u− ~u0)
que involucra el gradiente, es decir el vector de las derivadas par-ciales de orden 1:
∇~u0F =
(∂F∂x1
(~u0);∂F∂x2
(~u0); . . . ;∂F∂xn
(~u0))
La ecuación del hiperplano tangente en un punto donde F es dife-renciable es
z = F(~u0) +∇~u0F · (~u− ~u0)
donde ~u = (x1; x2; . . . ; xn).
Puntos críticos y extremos locales. Se define de manera similaral caso de dos variables los puntos críticos (puntos donde el gra-diente se cancela) y los extremos (locales o absolutos, estrictos ono). Todos los extremos locales son puntos críticos. La casuística delos puntos críticos es, sin embargo, más rica.
Derivada direccional. Se define la derivada direccional como enel caso de las funciones de dos variables. El vector gradiente indicala dirección de crecimiento máximo, y hay crecimiento nulo en lasdirecciones ortogonales al gradiente.


![Representación gráfica de funciones · Web viewLAS FUNCIONES EXPONENCIALES LAS FUNCIONES LOGARÍTMICAS FUNCIONES TRIGONOMÉTRICAS CARACTERÍSTICAS - Dominio: R - Recorrido: [-1,1]](https://static.fdocument.org/doc/165x107/5ff2e8de2328856d162b0394/representacin-grfica-de-funciones-web-view-las-funciones-exponenciales-las-funciones.jpg)