ÿ§„À¡à...ทันความรู ใหม ๆ มีความรู เรื่องเทคโนโลยีสารสนเทศ ก็จะสามารถ

PSI - 2011/2012 1
TD F2 - Correction
1 Induction dans une spire soumise à un champ magnétique
1. D'après la loi de Faraday : e = −dϕ
dtavec
ϕ =
∫∫cadre
−→B · d
−→S =
∫∫cadre
(Bx−→u x +By
−→u y)dxdy−→u y =
∫∫cadre
Bydxdy = B0ab sinωt
Il vient :e = −B0abω cosωt
2. La force électromotrice de Lorentz s'exprime :
e =
∫ −→Em · d
−→ℓ avec
−→Em = −→v ∧
−→B
La vitesse de rotation d'un point à une distance r de l'axe est :
−→v = ±rΩ−→u t = ±rΩ(− sinΩt−→u x + cosΩt−→u y)
(le ± correspond aux 2 points diamétralement opposés).
Ainsi, −→v ∧ −→B = ∓rΩB0 cosΩt
−→u z.
Sur les côtés "horizontaux", d−→ℓ est dans le plan (xOy) et donc (−→v ∧ −→
B ).d−→ℓ = 0.
Sur les côtés "verticaux", r =a
2et d
−→ℓ = ±dℓ−→u z. (−→v ∧ −→
B ).d−→ℓ = −
a
2ΩB0 cosΩtdℓ et
l'intégrale de dℓ sur les deux côtés donne 2b.
On obtient donce = −ωB0ab cosΩt
C'est le principe de la dynamo de vélo.
2 Rail de Laplace vertical
1. La loi des mailles conduit à l'équation électrique :
Ri− e+ Ldi
dt= 0
Avec e orienté dans le même sens que le courant i sur la gure.
Le calcul de la force électromotrice de Lorentz donne : e = −vBa < 0. Cette fem est négativecar le courant réel est orienté dans le sens opposé à celui de la gure, pour que l'eet desforces de Laplace, et donc de l'induction, s'opposent aux causes qui leur ont donné naissance,c'est-à-dire la chute de la barre.
Finalement :
Ri+ vBa+ Ldi
dt= 0
2. L'application du PFD à la barre conduit à l'équation mécanique :
mdv
dt= mg + iaB

2 TD F2 - Correction
3. En multipliant l'équation électrique par i et l'équation mécanique par v, on peut supprimerle terme commun vBiL pour obtenir :
d
[1
2mv2 +
1
2Li2
]dt
=d (mgz)
dt−Ri2
Cette équation exprimant la conservation de la puissance montre que l'énergie potentielle estconvertie en énergie cinétique et en énergie électromégnétique stockée dans la bobine, avec despertes dues à l'eet Joule.
4. En dérivant l'équation électrique, on obtient :
d2i
dt2+
R
L
di
dt+
B2a2i
mL+
Bga
L= 0
5. L'équation obtenue à la question précédente est celle d'un oscillateur harmonique amorti.
Dans le cas d'une résistance assez grande, le régime transitoire est très rapidement amorti, etlaisse place au régime permanent donné par :
i0 = −mg
Ba
L'équation électrique permet alors d'obtenir, avecdi
dt= 0 :
v0 =Rmg
B2a2
On se trouve donc en régime permanent, où la barre tombe à vitesse v0 constante, et uncourant induit i0 constant circule dans le circuit.
6. Dans l'hypothèse inverse d'une résistance négligeable, l'équation précédente se ramène à uneéquation d'oscillateur harmonique. En la résolvant, on obtient :
i(t) =mg
Ba[cos(ω0t)− 1]
avec ω0 =
√B2a2
mL.
L'équation électrique permet d'obtenir, avec R = 0 :
v(t) =g
ω0sin(ω0t)
Par une simple intégration, on en déduit :
z(t) = −g
ω20
cos(ω0t) + z0
Dans ce cas, il y a oscillation, c'est à dire que l'énergie potentielle de pesanteur est restituéessous forme d'énergie cinétique et d'énergie électromagnétique stockée dans la bobine et vice-versa.

PSI - 2011/2012 3
3 Modélisation d'une machine à courant continu
1. La machine fonctionne en mode récepteur donc si uMCC > 0, le courant iMCC est positiflorsqu'il est orienté en convention récepteur, donc e < 0 et e = −φ0ω
équation électrique : E −Ri− φ0ω − Ldi
dt= 0
La machine étant motrice, elle exerce un couple positif sur l'arbre, de sorte que−→Γ = φ0i
−→uz.On applique le théorème du moment cinétique en projection sur l'axe (Oz) :
équation mécanique : Jdω
dt= −fω + φ0 i
2. La machine fonctionne en mode générateur donc si uMCC > 0, le courant iMCC est positiflorsqu'il est orienté en convention générateur, donc e > 0 et e = −φ0ω avec ω < 0.L'équation électrique reste inchangée :
équation électrique : E −Ri− φ0ω − Ldi
dt= 0
La machine étant génératrice, elle exerce un couple négatif sur l'arbre, de sorte que−→Γ =
−φ0i−→uz. L'équation mécanique devient :
Jdω
dt= −fω − φ0 i
3. Lorsque le rotor est bloqué, ω = 0 et donc e = 0. Les équations précédentes deviennent :
E −Ri− Ldi
dt= 0 et ω = 0
6 Oscillations d'un petit aimant
L'application du théorème du moment cinétique à l'aimant, en projection sur l'axe (Oz), donne :
dL0
dt= − [mgL+MB] sin θ or
dL0
dt= mL2θ−→u z
On obtient donc une équation diérentielle en θ : θ +
(g
L+
MB
mL2
)sin θ = 0
Si le termeg
L+
MB
mL2est positif, on obtient des oscillations et si θ reste petit, on obtient des
oscillations similaires à celles d'un pendule, de période :
T0 =2π√
g
L+
MB
mL2
Si le termeg
L+
MB
mL2est négatif, ce qui est le cas si B est négatif et susamment grand, on obtient
des oscillations autour de la position θ = π (le changement de variable θ′ = θ + π permet en eetd'obtenir l'équation d'un oscillateur harmonique pour θ′). De plus, si θ′ reste petit (c'est-à-dire si θreste proche de π), on obtient des oscillations de période :
T0 =2π√
−g
L−
MB
mL2
Dans ce cas, tout se passe comme si la gravité avait été inversée.

4 TD F2 - Correction
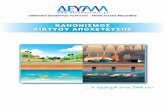
5 Champ créé par une spire sur son axe
1.
Invariances : la distribution de courants est invariante parrotation autour de (Oz).Les coordonnées cylindriques sont donc adaptées.
De plus, d'après le principe de Curie, les projections du
champ créé sont invariantes par cette rotation donc ne dé-pendent pas de θ : Bi(r, θ, z) = Bi(r, z). Enn, r = 0 pourM ∈ (Oz) donc Bi(r, θ, z) = B(z).
Symétries : soit M un point appartenant à l'axe (Oz). Tous les plans contenant M et (Oz)sont plans d'anti-symétrie de la distribution de courants donc le champ magnétostatique enM appartient à l'intersection de ces plans :
−→B (M) est selon −→uz.
Synthèse :−→B (M) = Bz (z)
−→uz.
La loi de Biot et Savart s'écrit :−→B (M) = µ0
4π
∫I−→dl∧−−→PMPM3
−−→PM = −R−→ur + z−→uz−→dl = R dθ−→uθ (coordonnées cylindriques)
d'où−→B (M) =
µ0I
4π
∫ 2π
0
R2 dθ
(R2 + z2)3/2−→uz + ...︸︷︷︸
=−→0
(∫ 2π
0: circuit parcouru en même sens que I
)
soit−→B (M) =
µ0I
2
R2
(R2 + z2)3/2−→uz .
On a bien−→B (M) =
µ0I
2Rsin3 (α)−→uz car sin (α) =
R√R2 + z2
.
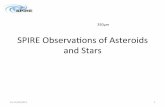
2. B =µ0I
2
R2
(R2 + z2)3/2d'où son graphe en fonction de z :
3. À très grande distance de la spire, z ≫ R :−→B (M) ≃ µ0I
2
R2
z3−→uz
Note : Pour un dipôle magnétostatique, on a :B′
r =µ0M4π
2 cos (θ′)
r′3=
µ0M2πz3
si θ′ = 0 (sur l'axe)
B′θ =
µ0M4π
sin (θ′)
r′3= 0 si θ′ = 0 (sur l'axe)
et−→M = I
−→S = IπR2−→uz d'où
−→B = B′
r−→uz =
µ0I
2
R2
z3−→uz sur l'axe (−→ur′ = −→uz).
À grande distance, le champ créé par une spire s'identie donc à celui d'un dipôle magnéto-statique.

PSI - 2011/2012 5
7 Moteur synchrone
1. La valeur instantannée du couple magnétique−→Γ exercé par le champ sur la pièce mobile vaut :
−→Γ = MB0sin [(ω0 − ω)t+ α]−→u z
La valeur moyenne de ce couple vaut :
⟨−→Γ ⟩ = −→0 si ω = ω0
et :⟨−→Γ ⟩ = MB sinα−→u z si ω = ω0
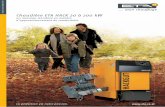
2. Traçons l'allure du graphe de ⟨−→Γ ⟩ en fonction de α :
0
MB
α
< Γ >
ππ/2
−π −π/2
-MB
couple
moteur
couple
résistant
Le dispositif fonctionne en moteur (c'est-à-dire que le champ magnétique entraîne le moment
magnétique dans une rotation dans le même sens) lorsque ⟨−→Γ ⟩ > 0 donc pour α ∈ [0, π].
Dans ce cas, la puissance maximale Pmax qu'il peut fournir vaut :
Pmax =−→Γ · −→ω 0 = MB0ω0 sinα
3. Si le moteur prend de l'avance, d'après la gure de l'énoncé, l'angle α diminue.
Si α ∈
[0,
π
2
], le couple diminue d'après la gure précédente, donc le moteur ralentit, et il
perd son avance. Le fonctionnement est donc stable.
En revanche, pour α ∈
[π
2, π
], le couple augmente, et le moteur accélère et prend donc encore
davantage d'avance : le fonctionnement est donc instable.

6 TD F2 - Correction
10 Galvanomètre à cadre mobile

PSI - 2011/2012 7
11 Machine à courant continu
1. Équation mécanique
On applique le théorème du moment cinétique par rapport à l'axe (AA′).
Un tronçon−→dℓk = −dr−→er du k-ième rayon, parcouru par le courant ik orienté de la péri-
phérie vers le centre, est soumis à une force de Laplace :
−→dF = ik
−→dℓk ∧
−→B = −ik dr
−→er ∧−→B = ik B dr−→eθ
Le moment élémentaire de cette force par rapport à l'axe de rotation est :
d−→M = r−→er ∧
−→dF = ik B r dr−→ez

8 TD F2 - Correction

PSI - 2011/2012 9

10 TD F2 - Correction
12 Caractérisation de deux machines à courant continu
Cas 1 : M1 moteur avec ω > 0. Il fonctionne donc en mode récepteur, et exerce donc un couplemoteur, donc T1 = φ0i1 et u1 = φ0ω = −e1. Toutes les grandeurs sont positives sauf e1.
On vérie donc bien que :
Pelec = e1i1 < 0 mode récepteur
Pmeca =−→T 1 ·
−→Ω = T1Ω > 0 moteur
M2 génératrice avec ω > 0. Elle fonctionne donc en mode générateur, et exerce donc un couplerésistant, donc T2 = −φ0i2 et u2 = φ0ω = e2. Attention, la convention n'est pas celle ducours ici, du fait des orientations du schéma ! Toutes les grandeurs sont positives sauf T2.
On vérie donc bien que :
Pelec = e2i2 > 0 mode générateur
Pmeca =−→T 2 ·
−→Ω = T2Ω < 0 frein
Cas 2 : M1 génératrice, fonctionne donc en mode générateur, et exerce donc un couple résistant,donc T1 = −φ0i1 et u1 = φ0ω = e1. Toutes les grandeurs sont positives sauf T1.
On vérie donc bien que :
Pelec = e1i1 > 0 mode générateur
Pmeca =−→T 1 ·
−→Ω = T1Ω < 0 frein
M2 moteur, fonctionne donc en mode récepteur, et exerce donc un couple moteur, donc T2 = φ0i1et u2 = φ0ω = −e2. Toutes les grandeurs sont positives sauf e2.
On vérie donc bien que :
Pelec = e2i2 < 0 mode récepteur
Pmeca =−→T 2 ·
−→Ω = T2Ω > 0 moteur

PSI - 2011/2012 11