T W sin θ D - hildalarrondo.nethildalarrondo.net/wp-content/uploads/2014/04/Clase6_AED2015.pdf ·...
8
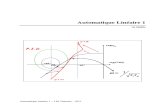
Clase 6 Piloto Comercial con HVI Aerodinámica 2015 1 Aerodinámica del descenso Descenso con motor El procedimiento usual para abandonar el nivel de crucero es reducir potencia e iniciar un descenso a velocidad constante. Dado que el descenso es un movimiento rectilíneo uniforme las fuerzas están balanceadas. Eso significa que T + W sin θ = D W cos θ = L ⎧ ⎨ ⎩ Por lo tanto se cumple θ ≅ tan θ = D − T W = V desc V TAS V desc = P nec − P disp W La expresión para la velocidad de descenso es similar a la de velocidad ascensional, sólo que en este caso la Pnec es mayor que la Pdisp. D W L θ T
-
Upload
trinhtuyen -
Category
Documents
-
view
225 -
download
0
Transcript of T W sin θ D - hildalarrondo.nethildalarrondo.net/wp-content/uploads/2014/04/Clase6_AED2015.pdf ·...

�Clase 6 Piloto Comercial con HVI
Aerodinámica 2015
1
Aerodinámica del descenso
Descenso con motor
El procedimiento usual para abandonar el nivel de crucero es reducir potencia e iniciar un descenso a velocidad constante. Dado que el descenso es un movimiento rectilíneo uniforme las fuerzas están balanceadas. Eso significa que
T +W sin θ = DW cosθ = L⎧⎨⎩
Por lo tanto se cumple
θ ≅ tan θ =D − TW
=VdescVTAS
Vdesc =Pnec − Pdisp
W
La expresión para la velocidad de descenso es similar a la de velocidad ascensional, sólo que en este caso la Pnec es mayor que la Pdisp.
D
W
L
θ
T

�Clase 6 Piloto Comercial con HVI
Aerodinámica 2015
2
Descenso sin motor
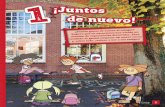
En el planeo sin motor la tracción T desaparece y quedan como únicas fuerzas en equilibrio el peso W, la sustentación L y el drag D. La trayectoria seguida por el avión en el planeo sin motor es una recta a velocidad constante. La óptima trayectoria de planeo es la que nos lleva más lejos y por lo tanto es la que forma un menor ángulo θ con el piso. Eso significa que avanzamos horizontalmente en forma considerable en tanto descendemos muy poco o dicho en términos correctos obtenemos la mejor relación de planeo.
El ángulo de ataque óptimo αplaneo para planeo sin motor es un concepto muy importante para un piloto de monomotor ligero porque manteniendo ese ángulo obtiene el máximo alcance (sin viento) en el caso de una emergencia. A partir de la figura se observa que
DL=W cosθW sinθ
= tgθ
Como se ve entonces, el ángulo de la trayectoria depende exclusivamente del ángulo de ataque αplaneo, pues el cociente D/L también depende sólo del ángulo de ataque αplaneo. Dado que D/L es mínimo para cierto ángulo de ataque αplaneo resulta que el piloto debe manentener ese ángulo de ataque. En general los aviones no cuentan con un indicador de ángulo de ataque, El piloto tiene entonces conocer la velocidad indicada que corresponde al ángulo de ataque para planeo óptimo αplaneo, y lo que debe hacer es mantener esa velocidad indicada. Si picamos más el avión o bien si lo colgamos más, disminuimos la distancia horizontal alcanzable. La velocidad de planeo le permitirá descender con la mejor relación de planeo y alejarse una distancia máxima desde el punto en que se inicia la emergencia. Si no hay viento la distancia horizontal nos define un círculo que puede ser alcanzado por el avión. Por supuesto si hay viento las distancias alcanzables
D=W sen θ W
L= W cos θ
θ

�Clase 6 Piloto Comercial con HVI
Aerodinámica 2015
3
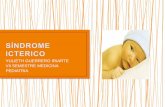
desde tierra no son iguales a favor que en contra del viento. El planeo libre se hace con avión limpio. MODIFICACIÓN CON EL PESO En primer lugar, el ángulo óptimo de ataque αplaneo que corresponde a la trayectoria óptima sale de la curva D/L y NO SE VE AFECTADO POR EL PESO. Todo lo que tenemos que hacer es obtener el ángulo de ataque tal que se logre mínimo valor en D/L, como muestra la siguiente figura.
Si elegimos ese ángulo de ataque, que en la figura nos da 2 gados, obtendremos el máximo alcance horizontal pues el avión tendrá la mejor relación de planeo. Como en el eje vertical el valor es 0,045 eso significa que vamos a descender 45 pies mientras avanzamos 1000 pies en sentido horizontal, o en forma equivalente descendemos 4500 pies mientras avanzamos 100000 pies (aproximadamente 15 mn) en sentido horizontal. Es decir el valor de D/L nos da la relación de planeo.
Un punto importante es, si mantenemos el ángulo de ataque αplaneo determinado arriba, vamos a recorrer siempre la misma trayectoria en el espacio, y tendremos la misma relación de planeo, sin importar el peso del avión. Sin embargo no vamos a emplear el mismo tiempo para recorrerla, es decir LA VELOCIDAD OPTIMA DE PLANEO SI DEPENDE DEL PESO DEL AVIÓN.
De la fórmula de sustentación, sabemos que, para el VRN hay una relación entre ángulo de ataque, y la velocidad IAS, dada por la expresión
Note que el planeo sin motor no es un VRN, dado que el movimiento del avión no es horizonal, sino que forma un ángulo con el suelo. Sin embargo ese ángulo es pequeño, y por eso podemos calcular la velocidad de planeo utilizando la expresión anterior. Es decir para calcular la velocidad IAS óptima de planeo debemos colocar en la
L =W = CLSV2 δ2

�Clase 6 Piloto Comercial con HVI
Aerodinámica 2015
4
expresión anterior la densidad standard, el ángulo de ataque óptimo de planeo, el peso del avión y la superficie alar y obtendremos la velocidad óptima de planeo. Es decir: donde vplaneo será una velocidad IAS, si colocamos la densidad standard o será una velocidad TAS, si colocamos la densidad verdadera. CL se calculará con las gráficas correspondientes al perfil alar del avión, para el ángulo de ataque óptimo αplaneo, que es el que corresponde al máximo en la curva L/D versus α o al mínimo de la curva D/L. Los fabricantes nos dan usualmente la velocidad óptima de planeo, calculada para el peso completo. Una pregunta importante es:
¿Cómo afecta el peso a la velocidad óptima de planeo?
Sea W1 el peso para el cual el fabricante nos da la velocidad de planeo y V1 esa velocidad de planeo.
Sea W2 el peso para el cual deseamos calcular la velocidad de planeo y V2 esa velocidad de planeo.
Note que, como el ángulo de ataque αplaneo no depende del peso W, el valor de CL es el mismo en ambas expresiones. Dividiendo miembro a miembro la segunda ecuación por la primera, resulta: De donde podemos despejar el valor de V2.
W1 = CLSV12 δ2
W2 = CLSV22 δ2
W2
W1
=V22
V12
W = CLSvplaneo2 δ
2

�Clase 6 Piloto Comercial con HVI
Aerodinámica 2015
5
Ejemplo: supongamos que la velocidad óptima de planeo es de 80 mph cuando el peso del avión es 2000 libras. ¿Cuál será, si el peso es 1900 libras? si despejamos x obtenemos 78 millas por hora. Cuando estamos utilizando el planeo en una situación de emergencia la influencia del viento es crucial. Toda la deducción anterior permanece válida para el movimiento del avión respecto del aire. Pero el viento afecta nuestro movimiento relativo a Tierra.
Es decir la GS horizontal está dada por la suma vectorial de la TAS y la velocidad del viento (como vector) en el plano horizonal. Pero del mismo modo, la GS vertical o de descenso será igual a la TAS de descenso (vector vertical que apunta hacia abajo) más el vector viento vertical (que puede ser hacia arriba o hacia abajo).
Por ejemplo, si tenemos una componente vertical hacia abajo (una descendente) nos hará descender más rápido, en tanto que si es hacia arriba (una ascendente) nos permitirá mantenernos en vuelo mayor tiempo. Por su parte una componente horizontal de frente nos disminuirá el avance horizontal respecto de tierra y nos hará avanzar menos respecto del suelo. Si se combina viento hacia abajo y de frente estamos en la peor situación.
La curva polar del planeador
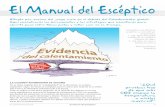
Los pilotos de planeador vuelan siempre en emergencia y no pueden conformarse con calcular la situación ideal sin viento pues no es la situación real en la que van a encontrarese. Por eso en el caso de los planeadores una información esencial es la denominada curva polar del planeador, que es provista por el fabricante o bien puede determinarse experimentalmente.
En la figura, tomada del sitio http://avia.tion.ca/documentation/polar, puede verse la posición un tiempo t después de la partida, de tres planeadores idénticos (con igual curva polar), que partieron juntos desde una misma altura, pero que eligieron distintas velocidades de vuelo (y por lo tanto distintos ángulos de ataque (α). Comencemos suponiendo que no hay viento y los planeadores son idénticos y tienen el mismo peso. Cada planeador mide su velocidad horizontal y su velocidad descendente. Cuanto más hacia abajo está la nariz mayor es la velocidad horizontal del planeador, según muestra la siguiente tabla.
19002000
=x2
802

�Clase 6 Piloto Comercial con HVI
Aerodinámica 2015
6
La velocidad óptima de planeo dada por el fabricante es vplaneo=42 KIAS, y corresponde al planeador amarillo. Eso en realidad podíamos verificarlo nosotros mismos empleando la tabla de velocidades que constuimos abajo. Dividiendo la velocidad de descenso por la velocidad de avance se obtiene la relación de planeo de cada planeador. Se puede ver que efectivamente el planeador amarillo está volando con la mejor relación de planeo, dada por 1,9/42=0,045.
El que primero llega al piso es el planeador rojo, que es el que tiene la mayor velocidad de descenso (sink rate), le sigue el amarillo, luego el azul y el último en llegar es el verde. El planeador rojo y el verde siguen exactamente la misma trayectoria y llegan al piso en el mismo lugar. Eso es así porque sus relaciones de planeo son idénticas, dado que el cociente 1,6/31 da el mismo resultado que el cociente 3,2/62. Si unimos los puntos donde se encuentran los cuatro planeadores en la "foto" de arriba, obtenemos la llamada curva polar. Es decir la curva polar es la gráfica que obtenemos midiendo la velocidad horizontal y vertical y representándolas en los dos ejes.

�Clase 6 Piloto Comercial con HVI
Aerodinámica 2015
7
Una vez que tenemos la curva polar, la velocidad óptima de planeo se obtiene trazando la tangente a la curva polar desde el origen, que en nuestro caso nos da los 42 nudos mencionados arriba. Como dijimos la curva polar se obtuvo con planeadores idénticos, con igual peso W y sin viento. Si modificamos el peso del planeador amarillo (que es el que realizaba la trayectoria óptima) se deberá modificar la velocidad óptima de planeo para lograr el mismo alcance que obteníamos antes. Una forma de calcular la nueva velocidad es utilizar la fórmula dada en el ejemplo inicial. Otra forma, gráfica, que es la que utilizan los pilotos de planeador, es contar con la curva polar de su planeador para distintos pesos. En particular los planeadores suelen tener un compartimiento que puede ser cargado con agua y luego descargado antes del aterrizaje. Se debe contar entonces con la curva polar al menos para esas dos situaciones usuales. La figura siguiente muestra la curva polar para el planeador descargado y la curva polar para el planeador cargado. Allí se ve que ahora la velocidad óptima de planeo pasó a ser aproximadamente 55 nudos. El planeador amarillo llegará al mismo lugar de aterrizaje pero lo hará más rápido. Esa es la razón por la cual cuando se corren carreras de planeador se carga el planeador para aumentar su velocidad de planeo. Luego, antes del aterrizaje se lo descarga.

�Clase 6 Piloto Comercial con HVI
Aerodinámica 2015
8
En cuanto al viento la curva polar no se modifica pero se desplaza en el sentido del viento tanto como el valor en nudos que éste tenga. Si tenemos viento descendente tenemos que desplazar la polar hacia abajo, si tenemos ascendentes hacia arriba. Luego trazamos la tangente y obtenemos la nueva velocidad de planeo óptimo. Si tenemos viento de cola o de frente hacemos lo mismo pero en sentido horizontal. Si no queremos redibujar la curva simplemente corremos el origen de coordenadas en el sentido contrario al viento y desde ese punto corrido trazamos la tangente a la curva polar. TODO LO EXPLICADO ARRIBA VALE PARA VUELO CON ALAS NIVELADAS Y NO EN VIRAJE