T . F IS H E R , M . R O D R IG U E Z H E R T Z N - BYU...
18
QUASI-ANOSOV DIFFEOMORPHISMS OF 3-MANIFOLDS T. FISHER, M. RODRIGUEZ HERTZ Abstract. In 1969, Hirsch posed the following problem: given a dif- feomorphism f : N → N , and a compact invariant hyperbolic set Λ of f , describe the topology of Λ and the dynamics of f restricted to Λ. We solve the problem where Λ = M 3 is a closed 3-manifold: if M 3 is orientable, then it is a connected sum of tori and handles; otherwise it is a connected sum of tori and handles quotiented by involutions. The dynamics of the diffeomorphisms restricted to M 3 , called quasi- Anosov diffeomorphisms, is also classified: it is the connected sum of DA-diffeomorphisms, quotiented by commuting involutions. 1. Introduction This paper deals with hyperbolic sub-dynamics. It is related to a problem posed by M. Hirsch, around 1969: given a diffeomorphism f : N → N , and a compact invariant hyperbolic set Λ of f , describe the topology of Λ and the dynamics of f restricted to Λ. Hirsch asked, in particular, whether the fact that Λ were a manifold M would imply that the restriction of f to M is an Anosov diffeomorphism [11]. However, in 1976, Franks and Robinson gave an example of a non-Anosov hyperbolic sub-dynamics in the connected sum of two T 3 [3] (see below). There are also examples of hyperbolic sub-dynamics in non-orientable 3-manifolds, for instance, the example of Zhuzhoma and Medvedev [18]. We show here that all examples of 3-manifolds that are hyperbolic invariant sets are, in fact, finite connected sums of the examples above and handles S 2 × S 1 (see definitions in §3 and §5) Theorem 1.1. Let f : N → N be a diffeomorphism, and let M ⊂ N be a hyperbolic invariant set for f such that M is a closed orientable 3-manifold. Then the Kneser-Milnor prime decomposition of M is M = T 1 # ... #T k #H 1 # ... #H r Date : May 7, 2007. 2000 Mathematics Subject Classification. 37D05; 37D20. Key words and phrases. Dynamical Systems, Hyperbolic Set, Robustly Expansive, Quasi-Anosov. Partially supported by NSF Grant #DMS0240049, Fondo Clemente Estable 9021 and PDT.
Transcript of T . F IS H E R , M . R O D R IG U E Z H E R T Z N - BYU...

QUASI-ANOSOV DIFFEOMORPHISMS OF 3-MANIFOLDS
T. FISHER, M. RODRIGUEZ HERTZ
Abstract. In 1969, Hirsch posed the following problem: given a dif-feomorphism f : N ! N , and a compact invariant hyperbolic set ! off , describe the topology of ! and the dynamics of f restricted to !.We solve the problem where ! = M3 is a closed 3-manifold: if M3 isorientable, then it is a connected sum of tori and handles; otherwise itis a connected sum of tori and handles quotiented by involutions.
The dynamics of the di"eomorphisms restricted to M3, called quasi-Anosov di!eomorphisms, is also classified: it is the connected sum ofDA-di"eomorphisms, quotiented by commuting involutions.
1. Introduction
This paper deals with hyperbolic sub-dynamics. It is related to a problemposed by M. Hirsch, around 1969: given a di!eomorphism f : N ! N , anda compact invariant hyperbolic set " of f , describe the topology of " andthe dynamics of f restricted to ". Hirsch asked, in particular, whetherthe fact that " were a manifold M would imply that the restriction of fto M is an Anosov di!eomorphism [11]. However, in 1976, Franks andRobinson gave an example of a non-Anosov hyperbolic sub-dynamics inthe connected sum of two T3 [3] (see below). There are also examples ofhyperbolic sub-dynamics in non-orientable 3-manifolds, for instance, theexample of Zhuzhoma and Medvedev [18]. We show here that all examplesof 3-manifolds that are hyperbolic invariant sets are, in fact, finite connectedsums of the examples above and handles S2 " S1 (see definitions in §3 and§5)
Theorem 1.1. Let f : N ! N be a di!eomorphism, and let M # N be ahyperbolic invariant set for f such that M is a closed orientable 3-manifold.Then the Kneser-Milnor prime decomposition of M is
M = T1# . . .#Tk#H1# . . .#Hr
Date: May 7, 2007.2000 Mathematics Subject Classification. 37D05; 37D20.Key words and phrases. Dynamical Systems, Hyperbolic Set, Robustly Expansive,
Quasi-Anosov.Partially supported by NSF Grant #DMS0240049, Fondo Clemente Estable 9021 and
PDT.

2 T. FISHER, M. RODRIGUEZ HERTZ
the connected sum of k $ 1 tori Ti = T3 and r $ 0 handles Hj = S2 " S1.In case M is non-orientable, then M decomposes as
M = T1# . . .#Tk#H1# . . .#Hr
the connected sum of k $ 1 tori quotiented by involutions Ti = T3|!i and rhandles Hj = S2 " S1.
In 1976, Mane obtained the following characterization [15] (see also The-orem 3.3): g : M ! M is the restriction of another di!eomorphism to ahyperbolic set M that is a closed manifold, if and only if g is quasi-Anosov;that is, if it satisfies Axiom A and all intersections of stable and unstablemanifolds are quasi-transversal, i.e.:
(1.1) TxWs(x) % TxW
u(x) = {0} &x ' M
The Franks-Robinson’s example of a non-Anosov quasi-Anosov di!eo-morphism is essentially as follows: they consider a hyperbolic linear au-tomorphism of a torus T1 with only one fixed point, and its inverse inanother torus T2. They produce appropriate deformations on each torus(DA-di!eomorphisms) around their respective fixed points. Then they cutsuitable neighborhoods containing these fixed points, and carefully gluetogether along their boundary so that the stable and unstable foliationsintersect quasi-transversally. This is a quasi-Anosov di!eomorphism in theconnected sum of T1 and T2, and hence T1#T2 is a compact invariant hyper-bolic set of some di!eomorphism. The non-orientable example by Medvedevand Zhuzhoma [18] is similar to Franks and Robinson’s, but they performa quotient of each Ti by an involution before gluing them together.
The second part of this work, a classification of the dynamics of quasi-Anosov di!eomorphisms of 3-manifolds, shows that all examples are, in fact,connected sums of the basic examples above:
Theorem 1.2. Let g : M ! M be a quasi-Anosov di!eomorphism of aclosed 3-manifold M . Then
(1) The non-wandering set #(g) of g consists of a finite number ofcodimension-one expanding attractors, codimension-one shrinking re-pellers and hyperbolic periodic points.
(2) For each attractor " in #(g), there exist a hyperbolic toral automor-phism A with stable index one, a finite set Q of A-periodic points,and a linear involution ! of T3 fixing Q such that the restrictionof g to its basin of attraction W s(") is topologically conjugate to aDA-di!eomorphism fA
Q on the punctured torus T3 (Q quotiented by!. In case M is an orientable manifold, ! is the identity map. Ananalogous result holds for the repellers of #(g).

3
Item (2) above is actually a consequence of item (1), as it was shownby Plykin in [20, 21], see also [6] and [7]. A statement of the result canbe found in Theorem 4.3 in this work. The proof of Theorem 1.2 is in §4.Theorem 1.2, in fact, implies Theorem 1.1. This is proved in §5.
Let us see how a handle S2"S1 could appear in the prime decompositionof M : Consider a linear automorphism of a torus T1, and its inverse in atorus T2, as in Franks-Robinson’s example. Then, instead of exploding afixed point, one explodes and cuts around an orbit of period 2 in T1 and inT2. The rest of the construction is very similar, gluing carefully as in thatexample to obtain a quasi-Anosov dynamics. This gives the connected sumof two tori and a handle. Explanation and details can be found in §5.
Let us also mention that in a previous work [22] it was shown there exista codimension-one expanding attractor and a codimension-one shrinkingrepeller if g is a quasi-Anosov di!eomorphism of a 3-manifold that is notAnosov. The fact that only T3 can be an invariant subset of any knownAnosov system was already shown by A. Zeghib [29]. In that case, thedynamics is Anosov. See also [2] and [16].
This work is also related to a work by Grines and Zhuzhoma [8]. Therethey prove that if an n-manifold supports a structurally stable di!eomor-phism with a codimension-one expanding attractor, then it is homotopyequivalent to Tn, and homeomorphic to Tn if n )= 4. In a certain sense,the results deal with complementary extreme situations in the Axiom Aworld: Grines-Zhuzhoma result deals with structurally stable di!eomor-phisms, which are Axiom A satisfying the strong transversality condition.This means that all x, y in the non-wandering set satisfy at their points zof intersection: TzW
s(x) ! TzWu(y). In particular,
dim Esx + dim Eu
y $ n
In our case, we deal with quasi-Anosov di!eomorphisms, which are Ax-iom A satisfying equality (1.1). In particular, for x, y, z as above, we haveTzW
s(x) % TzWu(y) = {0}, so:
dim Esx + dim Eu
y * n
In the intersection of both situations are, naturally, the Anosov di!eomor-phisms.
Observe that it makes sense to get a classification of the dynamical be-havior of quasi-Anosov on its non-wandering set, since quasi-Anosov are #-stable [15] (see also §3). They form an open set, due to quasi-transversalitycondition (1.1). Moreover, they are the C1-interior of expansive di!eomor-phisms, that is, they are robustly expansive [14]. However, 3-dimensionalquasi-Anosov di!eomorphisms of M )= T3 are never structurally stable, so

4 T. FISHER, M. RODRIGUEZ HERTZ
they are approximated by other quasi-Anosov di!eomorphisms with di!er-ent dynamical behavior, but similar asymptotic behavior (Proposition 3.2).
Finally, in Section 7 we study quasi-Anosov di!eomorphisms in the pres-ence of partial hyperbolicity (see definitions in §7). We obtain the followingresult under mild assumptions on dynamical coherence:
Theorem 1.3. If f : M3 ! M3 is a quasi-Anosov di!eomorphism that ispartially hyperbolic, and either Ecs or Ecu integrate to a foliation, then f isAnosov.
Acknowledgments. We want to thank the referees for valuable comments,and Raul Ures for suggestions. The second author is grateful to the Depart-ment of Mathematics of the University of Toronto, and specially to MikeShub, for kind hospitality.
2. Basic definitions
Let us recall some basic definitions and facts: Given a di!eomorphismf : N ! N , a compact invariant set " is a hyperbolic set for f if there is aTf -invariant splitting of TN on ":
TxN = Esx + Eu
x &x ' "
such that all unit vectors v! ' E!!, with " = s, u satisfy
|Tf(x)vs| < 1 < |Tf(x)vu|
for some suitable Riemannian metric |.|. The non-wandering set of a dif-feomorphism g : M ! M is denoted by #(g) and consists of the pointsx ' M , such that for each neighborhood U of x, the family {gn(U)}n!Z isnot pairwise disjoint. The di!eomorphism g : M ! M satisfies Axiom A if#(g) is a hyperbolic set for g and periodic points are dense in #(g). Thestable manifold of a point x is the set
W s(x) = {y ' M : d(fn(x), fn(y)) ! 0 if n ! ,}
where d(., .) is the induced metric; the unstable manifold W u(x) is definedanalogously for n ! (,. If g satisfies Axiom A, then W s(x) and W u(x)are immersed manifolds for each x ' M (see for instance [25]). Also, if d! isthe intrinsic metric of the invariant manifold W !(x), for " = s, u, one hasconstants C, # > 0 and 0 < $ < 1 such that, for instance, if y ' W s(x), andds(x, y) * # for some small # > 0 then
(2.2) ds(fn(x), fn(y)) * C$nds(x, y) &n $ 0
an analogous bound holds for the unstable manifold.

5
Due to the Spectral Decomposition Theorem of Smale [26], if g is AxiomA, then #(g) can be decomposed into disjoint compact invariant sets, calledbasic sets:
#(g) = "1 - · · · - "r,
each "i contains a dense orbit. Furthermore, each "i can be decomposedinto disjoint compact sets "i = "i,1 - · · · - "i,k such that there exists ann ' N where each "i,j is invariant and topologically mixing for gn. A set Xis topologically mixing for a di!eomorphism f if for each pair of nonemptyopen sets U and V of X, there is K > 0 such that
fk(U) % V )= . &k $ K.
Note that dim Esx is constant for x varying on a basic set ", we shall call
this amount the stable index of ", and will denote it by st(").For any set " # M , let us denote by W !(") the set
!x!! W !(x), where
" = s, u. We define the following (reflexive) relation among basic sets:
"1 ! "2 /0 W u("1) % W s("2) )= .
The relation ! naturally extends to a transitive relation 1:
"i 1 "j /0 "i ! "k1! · · · ! "kr ! "j
where "k1, . . . ,"kr is a finite sequence of basic sets. The di!eomorphism
satisfies the no-cycles condition if 1 is anti-symmetric:
"1 1 "2 and "2 1 "1 =0 "1 = "2
In this case 1 defines a partial order among basic sets.We shall call " an attractor if " is a basic set such that W u(") = ".
Note that this implies that there exists a neighborhood U of " such that" =
"n!N
fn(U). Similarly, we shall call " a repeller if " is a basic set suchthat W s(") = ". If g is Axiom A and satisfies the no-cycles condition,then hyperbolic attractors and repellers are, respectively, the minimal andmaximal elements of 1.
A hyperbolic attractor " is a codimension-one expanding attractor if allx ' " satisfy dim W u(x) = dim M(1. Codimension-one shrinking repellersare defined analogously.
Note that an attractor can have topological dimension dimM ( 1, andstill be not expanding. See the survey [9] on expanding attractors for adiscussion on this topic.
3. Quasi-Anosov diffeomorphisms
Let f : N ! N be a di!eomorphism of a Riemannian manifold.

6 T. FISHER, M. RODRIGUEZ HERTZ
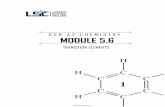
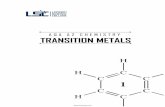
Definition 3.1. The sets W s(x) and W u(x) have a point of quasi-transversalintersection at x if
TxWs(x) % TxW
u(x) = {0}
(see figure 1)
yz
xW s(x)
W s(y)
W u(x)
W u(z)
Figure 1. Quasi-transversal intersection at x
At a point of quasi-transversal intersection x, all vectors in Esx form a
positive angle with vectors in Eux . But this does not necessarily imply
transversality, as can be seen in Figure 1.Let us note the di!erence between this definition and the strong transver-
sality condition. There, transversality is required at the intersection pointsof W u(x) and W s(y), but this can be attained without quasi-transversality,for instance, if we had two planes intersecting at a curve in a 3-dimensionalsetting.
Observe that a structurally stable quasi-Anosov di!eomorphism is Anosov(see [15] and references therein). On the other hand, quasi-Anosov di!eo-morphisms satisfy the no-cycles condition (see below), and hence they are#-stable. Also, quasi-Anosov are a C1-open set od di!eomorphisms[14].
Proposition 3.2. A quasi-Anosov di!eomorphism f that is not Anosovis approximated by #-conjugate quasi-Anosov di!eomorphisms that are nottopologically conjugate to f .
The following theorem by Mane relates quasi-Anosov di!eomorphismswith hyperbolic sub-dynamics.
Theorem 3.3 (Mane [15]). A di!eomorphism g is a quasi-Anosov di!eo-morphism if and only if M can be embedded as a hyperbolic set for a dif-feomorphism f : N ! N by means of an embedding i : M %! N satisfyingfi = ig.

7
This characterization reduces the proof of Theorem 1.1 to proving The-orem 1.2. See also §5. We shall review some properties of quasi-Anosovdi!eomorphisms:
Proposition 3.4. [15] Quasi-Anosov di!eomorphisms satisfy the no-cyclescondition.
Proof. If "i and "j are two basic sets satisfying "i ! "j, then W u(xi) %W s(xj) )= . for some xk ' "k. It follows from quasi-transversality that
[n ( st("i)] + st("j) = dim Euxi
+ dim Esxj
* n
where n is the dimension of M , hence st("j) * st("i). We get by transitivitythat
(3.3) "i 1 "j 0 st("i) $ st("j)
Suppose that,"1 ! "2 ! · · · ! "k ! "1.
We have, in the first place that st("i) = st("1), hence all intersectionsxi ' W u("i) % W s("i+1) for i = 1, . . . , k ( 1, and xk ' W u("k) % W s("1)are transversal, since
[n ( st("i)] + st("1) = dim Euxi
+ dim Esx1
= n
. This implies the xi’s belong to #(g), hence "i = "i for all i = 1, . . . , k,and so g satisfies the no-cycles condition. "
In the particular case of a quasi-Anosov di!eomorphism of a 3-dimensionalmanifold, this implies there can be only basic sets with stable index 2 or 1;and basic sets with stable index one can only succeed basic sets with stableindex one. We delay the proof of the next proposition until the next section.
Proposition 3.5. If f is a quasi-Anosov di!eomorphism and "0 is a co-dimension-one expanding attractor, and " is a basic set satisfying " 1 "0
with st(") = 1, then " = "0 or else " is a periodic point.
Analogously, if "0 is a codimension-one repeller, and " is a basic setsatisfying "0 1 " with st(") = 2, then " = "0 or " is a periodic point.This implies:
Proposition 3.6. All attractors of a quasi-Anosov di!eomorphism of a 3-dimensional manifold are codimension-one expanding attractors, unless thedi!eomorphism is Anosov. An analogous statement holds for repellers.
Proof. Indeed, let "R be a repeller such that st("R) = 1 (hence, not codi-mension-one). There is a maximal chain of 1 containing "R. Let "A be aminimal element of that chain. Then, due to (3.3) in the proof above, "A isa codimension-one expanding attractor. But then Proposition 3.5 implies

8 T. FISHER, M. RODRIGUEZ HERTZ
the repeller "R equals "A, since "A cannot be a periodic point. Therefore"R = "A = M . "
Note that Propositions 3.5 and 3.6 above prove Item (1) of Theorem 1.2.Item (2) of Theorem 1.2 follows from results in next section.
4. Codimension-one expanding attractors and shrinkingrepellers - Proof of Theorem 1.2
Before proving Proposition 3.5 we review properties of codimension-oneexpanding attractors. A codimension-one expanding attractor " is ori-entable if the intersection index of W s(x) % W u(y) is constant at all itsintersection points, for x, y ' ". This notion was first introduced by Grines[4, 5]. Let us also recall the following result by Zhuzhoma and Medvedev:
Theorem 4.1 (Medvedev-Zhuzhoma [18]). If M is an orientable closed3-manifold, then all codimension-one expanding attractors and shrinkingrepellers are orientable.
Derived from Anosov (or DA-) di!eomorphisms were introduced by Smalein [26] (see also [28]). They are certain deformations of hyperbolic automor-phisms of the torus. We shall use the following definition [20]:
Corresponding to a hyperbolic toral automorphism A with stable indexone, and a finite set Q of A-periodic points, there is a di!eomorphismfA
Q : T3 ! T3 di!eotopic to A, such that #(fAQ ) = " - Q, where " is a
codimension-one expanding attractor and Q is a finite set of fAQ -repelling pe-
riodic points. The stable manifolds of fAQ coincide with the stable manifolds
of A, except for a finite set of lines LQ. Each line L ' LQ contains a pointq ' Q. The component of L(" containing q is an interval whose endpointsp± are periodic boundary points of ". We call fA
Q a DA-di!eomorphism.Plykin obtains models for connected codimension-one expanding attrac-
tors using DA-di!eomorphisms [20, 21]. See also §8 of [8]. We shall also usesome of his intermediate results:
Theorem 4.2 (Plykin [20]). If " is a connected orientable codimension-one expanding attractor of a di!eomorphism g : M3 ! M3, then W s(")has the homotopy type of T3 (Q, where Q is a finite set of points. There isa finite point-compactification W s(") of W s(") having the homotopy typeof T3, and a homeomorphism g : W s(") ! W s(") extending g|W s(!), andadmitting two g-invariant fibrations that extend, respectively, the stable andunstable manifolds of ".
An analogous result holds for non-orientable attractors: there exists atwo-sheeted covering & : W s(") ! W s(") and a covering homeomorphism

9
g : W s(") ! W s(") that commutes with the involution ! : W s(") !W s(") associated to &, such that W s(") has the homotopy type of T3 [21].
Let us note that results above do not require that " has a dense orbit.
Theorem 4.3 (Plykin [20, 21]). If " is a connected orientable codimension-one expanding attractor of a di!eomorphism g : Mn ! Mn having a denseunstable manifold, then there exist a hyperbolic toral automorphism A withstable index one, and a finite set Q of A-periodic points, such that g|W s(!)
is topologically conjugate to the DA-di!eomorphism fAQ |Tn"Q.
If " is non-orientable, then there is a two-sheeted covering & : W s(") !W s(") with an associate involution ! : W s(") ! W s("), and a coveringhomeomorphism g : W s(") ! W s(") commuting with ! that is topologicallyconjugate to a DA-di!eomorphism fA
Q as described above.
Let us note that, in case where the manifold M is a torus, this result wasobtained in [7], see also [6] for the two-dimensional case.
Next, we state some of the results obtained in [8] and follow the generaloutline and notation.
Let " be a codimension-one expanding attractor. We will assume fornow that " is orientable. (The non-orientable case will follow by taking adouble cover and looking at the orientable case). A point p is a boundarypoint of a codimension-one expanding attractor " if there exists a connectedcomponent of W s(p) ( p, denoted W s
# (p), not intersecting ". Boundarypoints for hyperbolic codimension-one expanding attractors are finite andperiodic [20]. For z ' " and given points x, y ' W s(z) we denote (x, y)s (respectively [x, y]s) the open (closed) arc of W s(z) with endpoints x and y.If p is a boundary point of " and x ' W u(p)( p, then there is a unique arc(x, y)s
# such that (x, y)s % " = . and y ' ". If z ' W s(") ( ", then eitherz ' (x, y)s
# for some x and y elements of the unstable manifolds of boundarypoints, or z ' W s
# (p) for some boundary point p ' ".The boundary points p1 and p2 are called associated if for each point
x ' W u(p1) there exists an arc (x, y)s# where y ' W u(p2), and similarly
for each point y ' W u(p2) there is an arc (x, y)s# where x ' W u(p1). The
boundary point p1 is said to be paired if there exists a boundary point p2
such that p1 and p2 are associated 1. Two associated boundary points havealways the same period m. If dim(M) $ 3, then all boundary points arepaired.
For associated periodic points p1 and p2 let
'p1,p2: (W u(p1) ( p1) - (W u(p2) ( p2) ! (W u(p1) ( p1) - (W u(p2) ( p2)
1This concept also appears as 2- bunched in the bibliography. It is not to be confusedwith the concept of center bunching used for partially hyperbolic di"eomorphisms.

10 T. FISHER, M. RODRIGUEZ HERTZ
be defined by 'p1,p2(x) = y whenever (x, y)s
#. The continuous dependence ofstable and unstable manifolds implies that 'p1,p2
is a homeomorphism. Wemay naturally extend 'p1,p2
to be a homeomorphism of W u(p1)-W u(p2) toitself by defining 'p1,p2
(p1) = p2 and 'p1,p2(p2) = p1.
Fix Dp1a closed disk in W u(p1) containing p1 in the interior such that
Dp1# int(fm(Dp1
)). The boundary of Dp1is a circle denoted Sp1
. Thecircles Sp1
and fm(Sp1) bound an annulus contained in W u(p1) denoted
Ap1.
Since 'p1,p2is a homeomorphism we can define
• a closed disk Dp2= 'p1,p2
(Dp1) in W u(p2),
• a circle Sp2= 'p1,p2
(Sp1), and
• an annulus Ap2= 'p1,p2
(Ap1).
The setCp1,p2
=#
x!Sp1
(x,'p1,p2(x))s
#
is called a connecting cylinder of p1 and p2 and is homeomorphic to the open2-cylinder S1 " (0, 1). The set
Sp1,p2= Dp1
- Dp2- Cp1,p2
is called a characteristic sphere for p1 and p2 and is homeomorphic to a sphere.Define
Ap1,p2=
#
x!Ap1
[x,'p1,p2(x)]s#
which is homeomorphic to an annulus times an interval. Let
Dp1,p2=
#
j$0
f jm(Ap1,p2) =
#
x!W u(p1)"intDp1
[x,'p1,p2(x)]s#
and denote &p1as the projection from Dp1,p2
to W u(p1) ( int(Dp1). Then
the triple (Dp1,p2, W u(p1)( int(Dp1
), &p1) is a trivial fiber bundle with fiber
the interval [0, 1].The following is Corollary 3.1 in [8].
Lemma 4.4. Let "0 be a codimension-one orientable expanding attractorand p1, p2 are associated boundary points on "0. Suppose " is another basicset of M for f with st(") = 1. If there exists a point z ' " such thatW u(z) % Dp1,p2
)= ., then W u(z) intersects Cp1,p2.
Theorem 6.1 in [8] is similar to the following lemma.
Lemma 4.5. Suppose f is a quasi-Anosov di!eomorphism of a closed 3-manifold M and "0 is an orientable codimension-one expanding attractor off . Let " )= "0 be a basic set of st(") = 1 such that W u(")%Dp1,p2
)= .. LetC # Dp1,p2
% W u(z) be a component of the intersection of Dp1,p2% W u(z),

11
where z ' " is a periodic point. Then W u(z) % Cp1,p2= C % Cp1,p2
)= . andthis intersection consists of a unique circle, S, that is isotopic to Sp1
andSp2
.
We will provide an outline of the proof, (see also [8]), since some of the de-tails are needed in the proof of Proposition 3.5. The statement of Theorem6.1 in [8] assumes the di!eomorphism is structurally stable. Structurallystable di!eomorphisms have the strong transversality property which im-plies that for all x ' "0 and z ' " that
(4.4)W s(x) % W u(z) = W s(x) ! W u(z), andW u(x) % W s(z) = W u(x) ! W s(z).
This is the property used in the proof in [8]. However, if f is quasi-Anosovand "0 and " are codimension-one, then for all x ' "0 and z ' " property(4.4) holds by the quasi-transversal property of quasi-Anosov di!eomor-phisms.
First, we use Lemma 4.4 to show there is a component. Next, we usetransversality to show that every component C % Cp1,p2
is a circle, S, thatis isotopic to Sp1
and Sp2. So in fact each component divides Cp1,p2
into twocylinders.
Next, let BS # W u(z) be a minimal disk bounded by S. Since BS isminimal it follows that BS % Dp1,p2
= .. Then there are two possibilities.
(1) No BS contains z.(2) Some BS contains z.
It is shown that case (1) can not occur. For case (2) since f(Cp1,p2) # Dp1,p2
we know f(S)%S = . and S is inside f(S) in W u(z). It then follows that Sand f(S) bound a closed annulus in W u(z) which is a fundamental domainof W u(z) contained in Dp1,p2
. Thus the intersection of W u(z) and Cp1,p2is
a unique circle.Proof of Proposition 3.5. To simplify the argument we first assume theattractors are orientable. Let us suppose that " is a basic set that is acodimension-one and " is not a hyperbolic attractor. Since periodic pointsare dense in " and "0 we may assume there exist periodic points x ' "and x0 ' "0 such that W s(x0) % W u(x) )= .. Let y ' W s(x0) % W u(x).Then from the previous Lemma y ' (y1, y2)s
# for y1 and y2 in the unstablemanifolds of associated boundary points p1 and p2, respectively.
Let Sp1,p2be a characteristic sphere for p1 and p2 such that (y1, y2)s
# #Cp1,p2
, so Cp1,p2% W u(x) )= .. From the previous lemma we know that
W u(x) % Dp1,p2is a unique component C. Furthermore, there is a funda-
mental domain of W u(x) contained in Dp1,p2# W s("0). The invariance of
W s(") implies that W u(x) ( x # W s("0). Hence, (W u(x) ( x) % " = ..Since W u(x) % W s(x) is dense in a component of ", given by the Spectral

12 T. FISHER, M. RODRIGUEZ HERTZ
Decomposition Theorem, we know that " is trivial and consists of the orbitof x. In this way, the result follows for orientable attractors "0.
We now suppose that " is a codimension-one basic set and "0 is acodimension-one non-orientable attractor where " ! "0. This impliesthat M is non-orientable from [21]. Let M be an orientable manifold and& : M ! M is a (non-branched) double covering of M . Then there exists adi!eomorphism f of M that covers f . Furthermore, M contains a hyperbolicorientable codimension-one expanding attractor "0 such that "0 # &"1("0).The result now follows from the previous argument by lifting ". "
5. Proof of Theorem 1.1
Let us recall some basic definitions and results, which can be found in[19]. The connected sum of two 3-manifolds is obtained by removing theinterior of a 3-cell from each 3-manifold, and then matching the resultingboundaries, using an orientation reversing homeomorphism. The connectedsum of M and M % is denoted M#M %. In order to add a handle to a connected3-manifold M , one removes the interior of two disjoint 3-cells from M , andmatches the resulting boundaries under an orientation reversing homeomor-phism. If one adds a handle to M , one obtains a manifold isomorphic toM#S2 " S1. Note that M#S3 = M .
A manifold M )= S3 is prime if M = M1#M2 implies M1 = S3 or M2 = S3.We have the following Unique Decomposition Theorem (see also [13]):
Theorem 5.1 (Milnor [19]). Every 3-manifold M )= S3 can be written asa finite connected sum:
M = M1# . . .#Mk
where each Mi is prime, i = 1, . . . , k, and is unique up to order and iso-morphisms.
Note that the handles S2 " S1 are prime manifolds. The torus T3 is alsoprime.
Now, let us prove Theorem 1.1. Let M be a hyperbolic invariant set for adi!eomorphism f such that M is a 3-manifold. Then f |M is a quasi-Anosovdi!eomorphism [15]. Let us first assume that M is orientable. Theorem 4.1implies that all attractors and repellers of f |M are orientable. Then The-orems 4.2 and 4.3 imply that the basin of attraction/repulsion of each at-tractor/repeller is homeomorphic to a finitely punctured torus. Also, that frestricted to each basin is topologically equivalent to a DA-di!eomorphism.Let us first consider the simplest case of a non-Anosov quasi-Anosov di!eo-morphism: one with just one attractor and one repeller. Let us furthermoresuppose that the basin of attraction of the attractor is homeomorphic to atorus minus one point. If one takes a ball centered at that (repelling) point,

13
and cuts the pre-image of that ball under the DA-di!eomorphism, one ob-tains a fundamental domain, which is homeomorphic, under the conjugacy,to a fundamental domain D of f |M , met just once by the orbit of everypoint not in the attractor nor in the repeller of f |M . By connectedness,the basin of repulsion of the repeller must be also homeomorphic to a torusminus one (attracting) point A. And f restricted to this basin is also con-jugated to another DA-di!eomorphism. The image of D under this secondconjugacy consists of two spheres S3, each bounding a ball containing A inits interior. So, the fact that D is a fundamental domain implies that Mis the connected sum of two tori, just like in the Franks-Robinson example[3].
Let us suppose now that we have an attractor and a repeller, but that thebasin of attraction is homeomorphic to a torus minus k points, with k $ 2.One can assume that the k points are fixed under the DA-di!eomorphismby taking a su$ciently high iterate of the di!eomorphism. A connectednessargument shows that the basin of repulsion of the repeller is also home-omorphic to a torus minus k points. Now, the previous procedure showsthat M is obtained by removing k 3-cells from each torus and matchingthe resulting boundaries, using an orientation reversing homeomorphism.Observe that this implies that
M = T1#T2#H1# . . .#Hk"1
where T1, T2 are tori and the Hi are handles S2 " S1. Indeed, instead ofremoving simultaneously the k 3-cells of each torus, one can only removeone 3 cell from each torus and glue along their boundaries by f , whichreverses orientation. In this way one obtains the connected sum of two tori.The rest of the procedure consists in repeating (k ( 1) times the operation:cutting two disjoint 3-cells of this connected sum and matching the resultingboundaries by a reversing orientation homeomorphism. This is the same asadding a handle.
Now, in fact there is nothing special in having just one attractor andone repeller. In case there are more attractors or repellers, one proceedsinductively as in the previous cases until one obtains a finite connected sumof tori and handles.
Let us also consider the case where the non-wandering set has a basicset " that is a periodic orbit, we may assume st(") = st("0), and that" ! "0, where "0 is a connected codimension-one attractor. Let p andq be associated boundary periodic points and P1, ..., Pk be the set of allperiodic points with st(Pi) = 1 and
W u(Pi) %#
x!W u(p)"{p}
[x,(p,q(x)]s# )= .

14 T. FISHER, M. RODRIGUEZ HERTZ
for all 1 * i * k. Let x ' W u(p) ( {p} and
!x : [x,(p,q(x)]s# ! [0, 1]
be a homeomorphism. Denote P xi to be the point of intersection between
[x,(p,q(x)]s# and W u(Pi). By reordering the points, if necessary, assumethat !x(P x
i ) < !x(P xj ) for i < j. Then for any other x% ' W u(x%) and
!x! defined similarly we have !x!(P x!
i ) < !x!(P x!
j ) for i < j since W u(Pi) iscodimension-one.
For the rest of the construction we assume, with no loss of generality,that p, q, P1, ..., Pk are all fixed points. Define the set
D =#
x!W u(p)"{p}
[x,(p,q(x)]s# - W s# (p) - W s
# (q) - W s(P1) - · · · - W s(Pk).
Following the construction in the proof of Theorem 1 of [20] we can extendthe di!eomorphism f |D to a homeomorphism f on the compactificationD = D - )1 - · · ·)k+1 where each )i is a repelling fixed point for f . Fix* > 0 su$ciently small and let
B =#
x!W u! (p)"{p}
[x,(p,q(x)]s# - W s# (p) - W s
# (q) - (k#
i=1
W s(Pi)) - (k+1#
i=1
)i).
Let B"(0) be the ball of size * centered at the origin in Rn"1. Then we candefine a homeomorphism F : B"(0) " [0, 1] ! B so that
• F (0, 0) = p,• F (0, 1) = q,• F (0, 2i
2k+1) = Pi for 1 * i * k,• F (0, 2i+1
2k+1) = )i+1 for 0 * i * k,• F (x, t) ' [F (x, 0),(p,q(F (x, 0))]s#, and• F (x, 0) ' W u
" (p).
Furthermore, we can extend the unstable manifolds of the points in p-P1 -· · ·-Pk to a codimension-one fibration of D and extend the stable foliationto a fibration of D with one-dimensional fibers. Similar to Corollary 7.2in [8], there exists a compact arc apq # D with no self intersections suchthat
apq = p - W s# (p) - )1 - W s(P1) - )2 - · · · - Pk - )k+1 - W s
# (q) - q.
Let P be the set of saddle periodic points of stable index one that intersectW s("). Following the above construction we compactify W s(") - W s(P)to a set W s(") and extend the di!eomorphism f on W s(") - W s(P) to ahomeomorphism f of W s("). Where W s(") = W s(") - W s(P) -A whereA consists of a set of repelling periodic points for f . The proof of Theorem7.1 in [8] extends to W s(") to show that W s(") is homeomorphic to T3.

15
In the case where there is at least one non-orientable attractor or re-peller, then M is non-orientable. Theorem 4.3 implies that the basin ofattraction or repulsion of this attractor or repeller is homeomorphic to atorus quotiented by an involution minus k points. f is doubly covered bya DA-di!eomorphism in this set, and the procedure of removing cells andmatching the corresponding boundaries follows as in the previous cases,whence one obtains that
M = T1# . . .#Tn#H1# . . .#Hk
where the Tj = T3|!j are tori quotiented by involutions !j (possibly theidentity), and the Hi are handles.
6. An example of a quasi-Anosov diffeomorphism with a basicset that is a periodic orbit
Both the example by Franks-Robinson [3], and the example by Medvedev-Zhuzhoma [18] are quasi-Anosov di!eomorphisms whose non-wandering setconsists exclusively of one codimension-one expanding attractor and oneshrinking repeller.
Let us construct an example of a quasi-Anosov di!eomorphism with abasic set consisting of a periodic orbit.
Let A be a linear hyperbolic di!eomorphism of a 3-torus T1 having atleast one fixed point, and such that the stable dimension is 1. Make adeformation around a fixed point, in order to obtain a DA-di!eomorphismwith a repelling fixed point and a codimension-one expanding attractor.See details in Section 4. This new di!eomorphism h preserves the originalstable foliation. Now, make a new deformation, also preserving the originalstable foliation, such that the repelling fixed point turns into a saddle, andtwo repelling fixed points appear on its stable manifold, locally separatedby the unstable manifold of the saddle point.
Like in Franks-Robinson example, cut two 3-balls B2 and B3 containing,respectively, the repelling fixed points of T1. Now, take two 3-tori T2 andT3, and consider the dynamics of h"1 on each one of them. Cut two 3-balls B%
2 and B%3, each containing the attracting fixed points of T2 and T3
respectively. Glue carefully T1 and Tj along the boundary of Bj and B%j ,
j = 2, 3, by means of a orientation reversing homeomorphisms as describedin section §5. One obtains an Axiom A di!eomorphism of a manifold whichis the connected sum of T1, T2 and T3: T1#T2#T3. The non-wandering setof this di!eomorphism consists of one codimension-one expanding attrac-tor, two codimension-one shrinking repellers, and a hyperbolic fixed point.Proceeding as in [3] one perturbs the di!eomorphism producing a twist inthe regions where the surgery was performed. Since this perturbation islocal, it does not a!ect the hyperbolic behavior of the non-wandering set.

16 T. FISHER, M. RODRIGUEZ HERTZ
In this way one obtains an Axiom A di!eomorphism satisfying the quasi-transversality condition, and with the above mentioned non-wandering set.
7. Partially hyperbolic quasi-Anosov diffeomorphisms
In this section, we study quasi-Anosov di!eomorphisms in the presenceof partial hyperbolicity. A di!eomorphism f is called partially hyperbolic ifthere exists an invariant splitting of the tangent bundle TM = Es+Ec+Eu
such that all unit vectors v! ' E!x , " = s, c, u satisfy:
|Tfxvs| < |Tfxv
c| < |Tfxvu| and |Tfxv
s| < 1 < |Tfxvu|
It is a known fact that there are unique invariant foliations Ws and Wu
that are everywhere tangent, respectively, to Es and Eu (see, for instance[12]). However, Ec is not integrable in general. It is an open problem if it isintegrable in the case dim Ec = 1. Here, we shall consider an a priori mildhypothesis: either Ecs or Ecu integrates to a (codimension-one) foliation.
Let us prove Theorem 1.3. Assume that Ecu integrates to a foliation F .We may suppose that the manifold M is not the 3-torus, for otherwise theresult is immediate. Then, M is not irreducible (that is, there is an embed-ded sphere S2 not bounding any 3-dimensional ball). Indeed, irreduciblemanifolds are prime, and Theorem 1.1 implies that M is not prime unlessit is the 3-torus. Now, Theorem C.2., p 45 of Roussarie [24] implies thata codimension-one foliation F of a manifold that is not irreducible has acompact leaf. This compact leaf T must be homeomorphic to a 2-torus,since the strong unstable foliation has no singularities and does not containclosed leaves.
Take p ' M a periodic point in M , of period k, such that the stable man-ifold of p hits T . This implies that the set of leaves fkn(T ) (f preserves thefoliation) accumulates in p. Now, Haefliger [10] says that the set of pointslying in a compact leaf is compact. In particular p ' M , accumulatingpoint of compact leaves, must be in a compact leaf T0. It follows that T0 isfk-invariant. Moreover, by the above argument, T0 must be a 2-torus. Now,the local stable manifolds of T0 form an open set U satisfying fk(U) # U .This implies that T0 is a basic set that is an attractor, but this contradictsTheorem 1.2.(2).
References
[1] J. Franks, Anosov di"eomorphisms, Global Analysis Proc. Symp. Pure Math. 14
AMS Providence, Rhode Island (1970) 61-93[2] J. Franks, Invariant sets of hyperbolic toral automorphisms, Amer. J. Math. 99
(1977) 1089-1095

17
[3] J. Franks, C. Robinson, A quasi-Anosov di"eomorphism that is not Anosov,Trans. AMS, 223 (1976) 267-278.
[4] V. Grines, The topological equivalence of one-dimensional basic sets of di"eo-morphisms on two-dimensional manifolds Uspehi Mat. Nauk 29,6 (180) (1974)163-164
[5] V. Grines, The topological conjugacy of di"eomorphisms of a two-dimensionalmanifold on one-dimensional orientable basic sets I. Trans. Moscow Math. Soc.32 (1975) 31-56
[6] V. Grines, The topological conjugacy of di"eomorphisms of a two-dimensionalmanifold on one-dimensional orientable basic sets II. Trans. Moscow Math. Soc.34 (1977) 243-252
[7] V. Grines, E. Zhuzhoma, Topological clssification of orientable attractors on ann-dimensional torus, Russian Math. Surveys, 34 (1979) 163-164
[8] V. Grines, E. Zhuzhoma, On structurally stable di"eomorphisms with codimen-sion one expanding attractors, Trans. AMS 357 (2005), no. 2, 617-667
[9] V. Grines, E. Zhuzhoma, Expanding attractors, Regular and chaotic dynamics11, 2 (2006) 225-246
[10] A. Haefliger, Varietes feuilletes, Topologia Di!erenziale (Centro Int. Mat. Estivo,1 deg Ciclo, Urbino (1962)). Lezione 2 Edizioni Cremonese, Rome 367-397 (1962)
[11] M. Hirsch, On invariant subsets of hyperbolic sets. Springer, New York (1970)126-135
[12] M. Hirsch, C. Pugh, M. Shub, Invariant manifolds, Lecture Notes in Math. 583
(1977)[13] H. Kneser, Geschlossen Flachen in dreidimensionalen Mannigfaltigkeiten, Jahres-
bericht der Deutschen Mathematiker Vereinigung, 38 (1929) 248-260[14] R. Mane, Expansive di"eomorphisms, Dyn. Syst., Proc. Symp. Univ. Warwick
1973/74, Lect. Notes Math. 468, 162-174 (1975).[15] R. Mane, Quasi-Anosov di"eomorphisms and hyperbolic manifolds Trans. AMS,
229 (1977) 351-370.[16] R. Mane, Invariant sets of Anosov di"eomorphisms, Invent. Math. 46 (1978),
147-152[17] R. Mane, A proof of the C1 stability conjecture, Publ. Math. Inst. Hautes Etud.
Sci. 66 (1988) 161-210[18] V. Medvedev, E. Zhuzhoma, On nonorientable two-dimensional basic sets on 3-
manifolds. Sb. Math. 193 (2002), no. 5-6, 869-888[19] J. Milnor, A unique decomposition theorem for 3-manifolds, Amer. J. of Math.
84, 1 (1962) 1-7[20] R. Plykin, Hyperbolic attractors of di"eomorphisms, Russian Math. Surveys 35,
3 (1980) 109-121.[21] R. Plykin, Hyperbolic attractors of di"eomorphisms (the non-orientable case),
Russian Math. Surveys 35, 4 (1980) 186-187.[22] J. Rodriguez Hertz, R. Ures, J. Vieitez, On manifolds supporting quasi-Anosov
di"eomorphisms, C.R. Acad. Sci. 334, 4, 321-323 (2002)[23] C. Robinson, Dynmical Systems Stability, Symbolic Dynamics, and Chaos, CRC
Press, 1999.[24] R. Roussarie, Sur les feuilletages des varietes de dimension trois, Ann. Inst.
Fourier 21, 3 (1971) 13-82.

18 T. FISHER, M. RODRIGUEZ HERTZ
[25] M. Shub Global stability of dynamical systems, With the collab. of A. Fathi andR. Langevin. Transl. by J. Cristy, New York, Springer-Verlag. XII, (1987).
[26] S. Smale, Di"erentiable dynamical systems, Bull. AMS, 73,6 (1967) 747-817.[27] S. Smale, The #-stability theorem, Global Analysis, Proc. Symp. Pure Math. 14
(1970) 289-297[28] R. Williams. The ‘DA’ maps of Smale and structural stability, Global Anal., Proc.
Symp. Pure. Math., AMS 14(1970), 329-334[29] A. Zeghib, Subsystems of Anosov systems, Amer. J. Math.117 (1995), 1431-1448
IMERL, Facultad de Ingenierıa, Julio Herrera y Reissig 565, 11300 Mon-tevideo - Uruguay
E-mail address : [email protected] address : [email protected]