SYNTHÈSE D’UN PID NUMÉRIQUE - chateaut.free.frchateaut.free.fr/autom/Auro31_CM.pdf · Méthode...
7
SYNTHÈSE D’UN PID NUMÉRIQUE T. CHATEAU, POLYTECH CF R(z) S(z) y c (z ) y(z) + - ε(z) GB O (z) PID numérique : • Combine trois actions correctives : proportionnelle, intégrale et dérivée • Permet de corriger des systèmes d’ordre <= 2 avec peu de retard • Peut se synthétiser à partir d’une structure RST Introduction Méthode simplifiée de détermination d’un correcteur PID numérique Relation temporelle d’un PID u(t)= k p ε(t)+ 1 τ i t 0 ε(λ)dλ + τ d dε dt Equivalent numérique u k = k p ε k + T e τ i k j=0 ε j + τ d T e (ε k - ε k-1 ) u k : signal de commande ε k : signal d’erreur
Transcript of SYNTHÈSE D’UN PID NUMÉRIQUE - chateaut.free.frchateaut.free.fr/autom/Auro31_CM.pdf · Méthode...

SYNTHÈSE D’UN PID NUMÉRIQUE
T. CHATEAU, POLYTECH CF
R(z)S(z)
yc(z) y(z)+-
!(z)!GBO(z)
PID numérique :
• Combine trois actions correctives : proportionnelle, intégrale et dérivée
• Permet de corriger des systèmes d’ordre <= 2 avec peu de retard
• Peut se synthétiser à partir d’une structure RST
Introduction
Méthode simplifiée de détermination d’un correcteur PID numérique
Relation temporelle d’un PID
u(t) = kp
!!(t) +
1"i
" t
0!(#)d# + "d
d!
dt
#
Equivalent numérique
uk = kp
!
"!k +Te
"i
k#
j=0
!j +"d
Te(!k ! !k!1)
$
%
uk : signal de commande!k : signal d’erreur
Méthode simplifiée de détermination d’un correcteur PID numérique
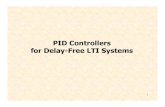
Généralisation du critère de Ziegler-Nichols
En boucle ouverte
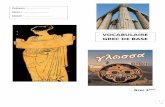
Méthode simplifiée de détermination d’un correcteur PID numérique
En boucle ouverte
P
PI
PID
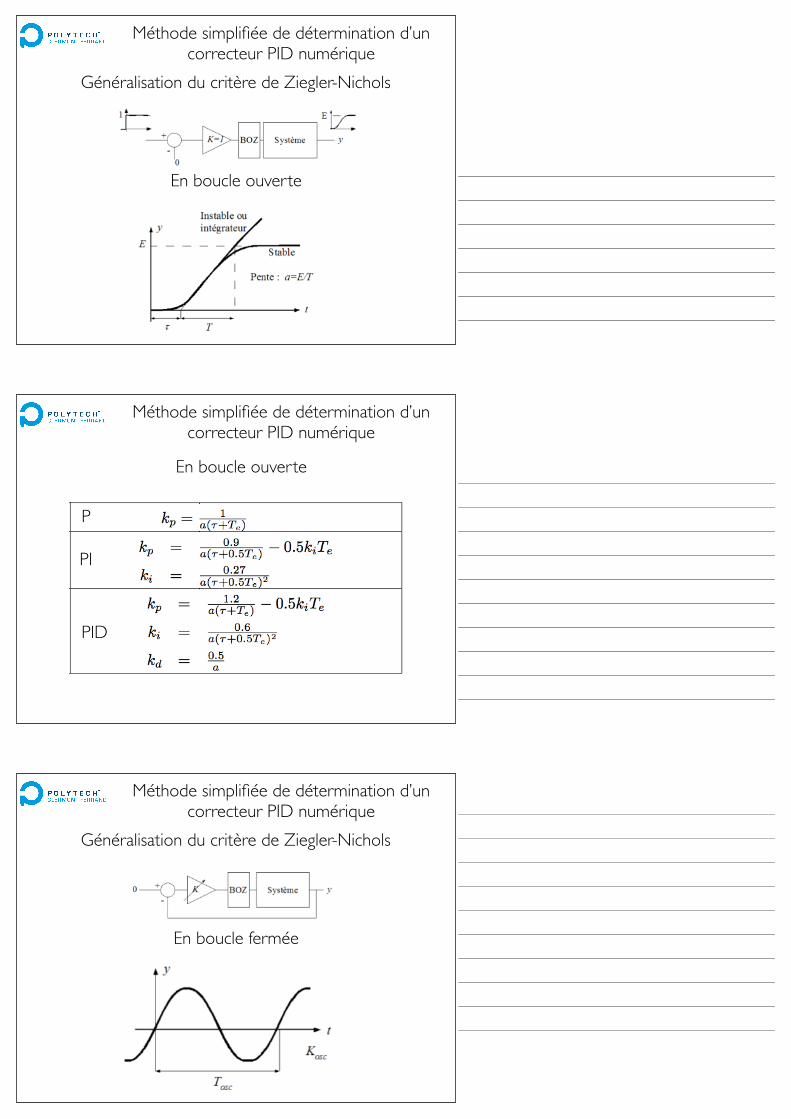
Méthode simplifiée de détermination d’un correcteur PID numérique
Généralisation du critère de Ziegler-Nichols
En boucle fermée
Méthode simplifiée de détermination d’un correcteur PID numérique
En boucle fermée
P
PI
PID
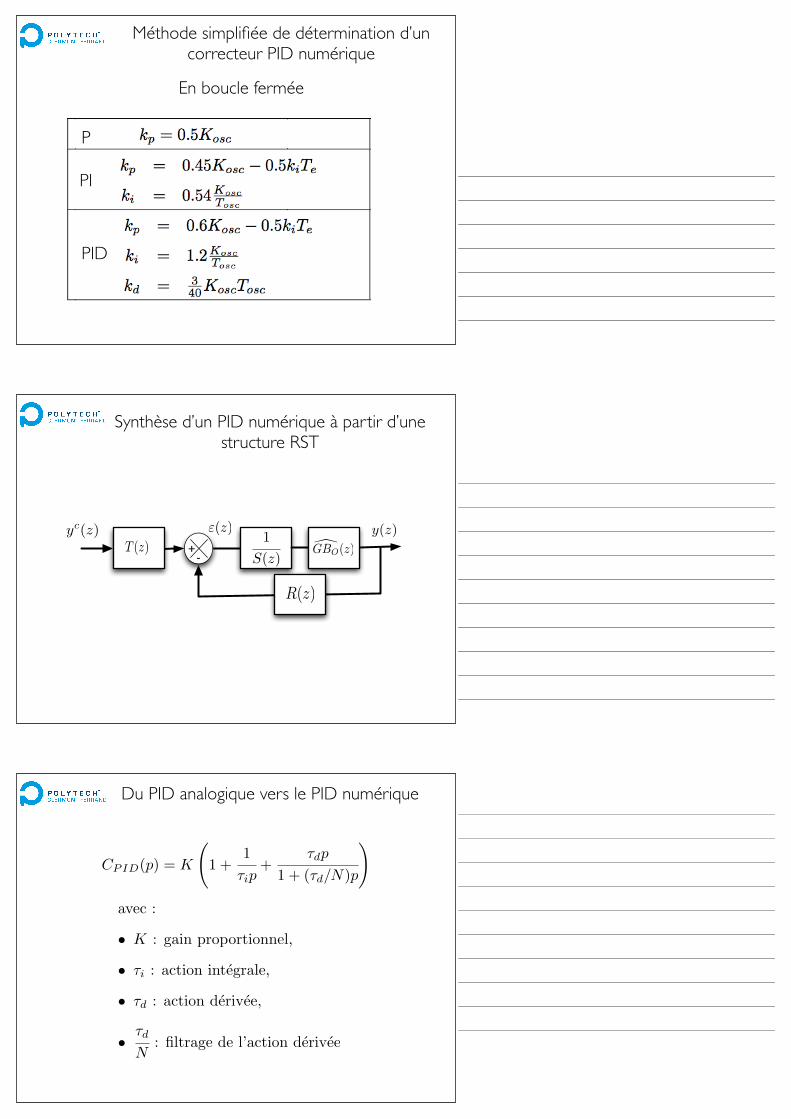
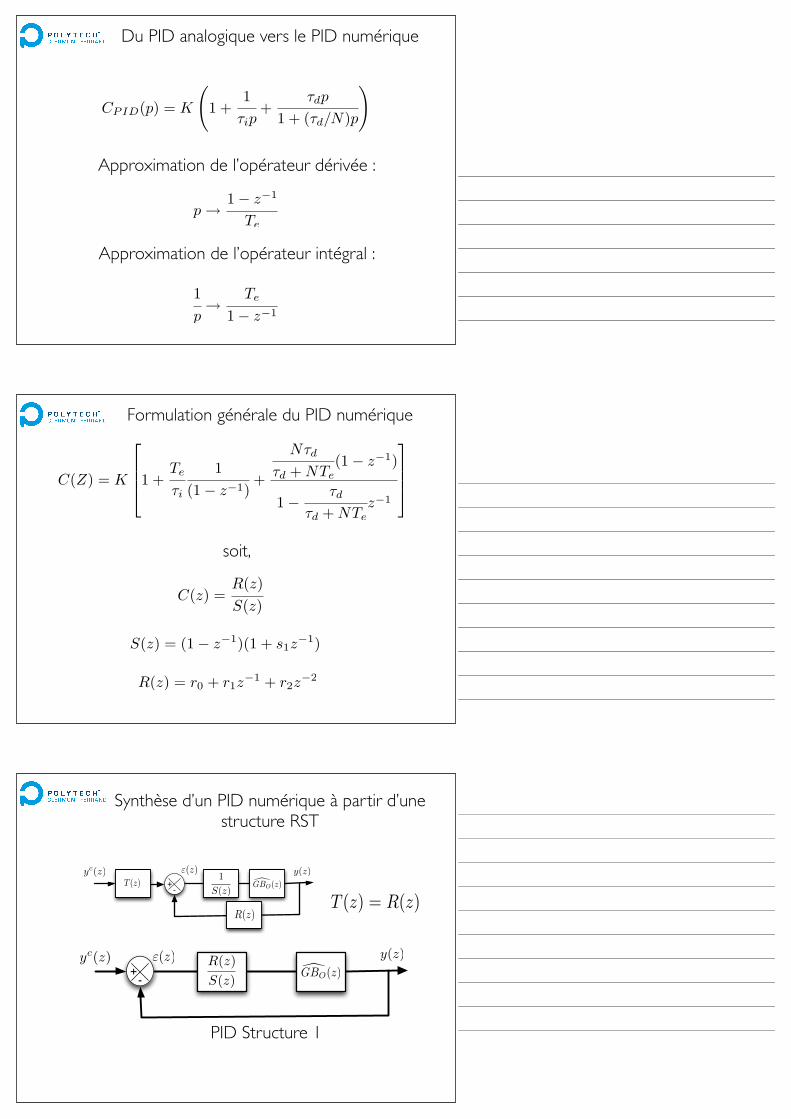
Synthèse d’un PID numérique à partir d’une structure RST
yc(z) y(z)+-
!(z)!GBO(z)
R(z)
1S(z)
T (z)
Du PID analogique vers le PID numérique
CPID(p) = K
!1 +
1!ip
+!dp
1 + (!d/N)p
"
avec :
• K : gain proportionnel,
• !i : action integrale,
• !d : action derivee,
•!d
N: filtrage de l’action derivee
Du PID analogique vers le PID numérique
CPID(p) = K
!1 +
1!ip
+!dp
1 + (!d/N)p
"
Approximation de l’opérateur dérivée :
Approximation de l’opérateur intégral :
p!1" z!1
Te
1p!
Te
1" z!1
Formulation générale du PID numérique
C(z) =R(z)S(z)
S(z) = (1! z!1)(1 + s1z!1)
R(z) = r0 + r1z!1 + r2z
!2
C(Z) = K
!
""#1 +Te
!i
1(1! z!1)
+
N!d
!d + NTe(1! z!1)
1!!d
!d + NTez!1
$
%%&
soit,
Synthèse d’un PID numérique à partir d’une structure RST
yc(z) y(z)+-
!(z)!GBO(z)
R(z)
1S(z)
T (z)
T (z) = R(z)
R(z)S(z)
yc(z) y(z)+-
!(z)!GBO(z)
PID Structure 1
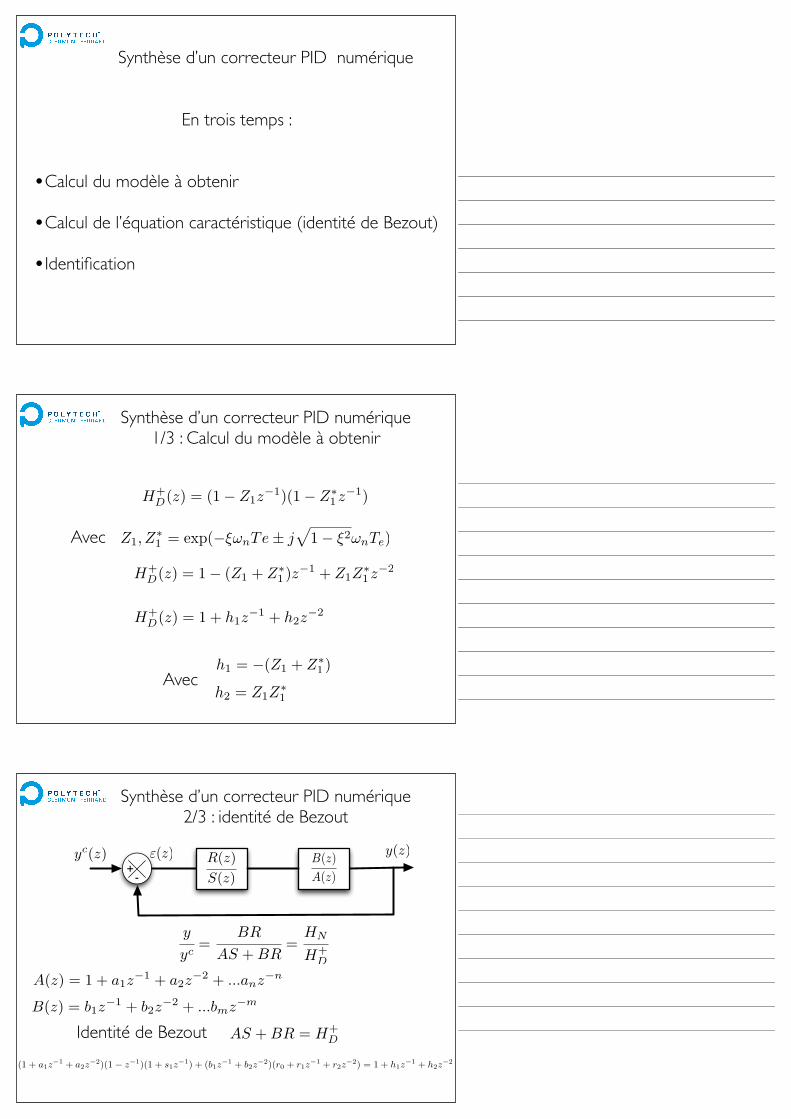
Synthèse d’un correcteur PID numérique
En trois temps :
•Calcul du modèle à obtenir
•Calcul de l’équation caractéristique (identité de Bezout)
•Identification
Synthèse d’un correcteur PID numérique1/3 : Calcul du modèle à obtenir
H+D(z) = (1! Z1z
!1)(1! Z"1z!1)
H+D(z) = 1! (Z1 + Z!
1 )z"1 + Z1Z!1z"2
h1 = !(Z1 + Z!1 )
h2 = Z1Z!1
Z1, Z!1 = exp(!!"nTe± j
!1! !2"nTe)Avec
Avec
H+D(z) = 1 + h1z
!1 + h2z!2
Synthèse d’un correcteur PID numérique2/3 : identité de Bezout
R(z)S(z)
yc(z) y(z)+-
!(z) B(z)A(z)
y
yc=
BR
AS + BR=
HN
H+D
AS + BR = H+DIdentité de Bezout
A(z) = 1 + a1z!1 + a2z
!2 + ...anz!n
B(z) = b1z!1 + b2z
!2 + ...bmz!m
(1 + a1z!1 + a2z
!2)(1! z!1)(1 + s1z!1) + (b1z
!1 + b2z!2)(r0 + r1z
!1 + r2z!2) = 1 + h1z
!1 + h2z!2
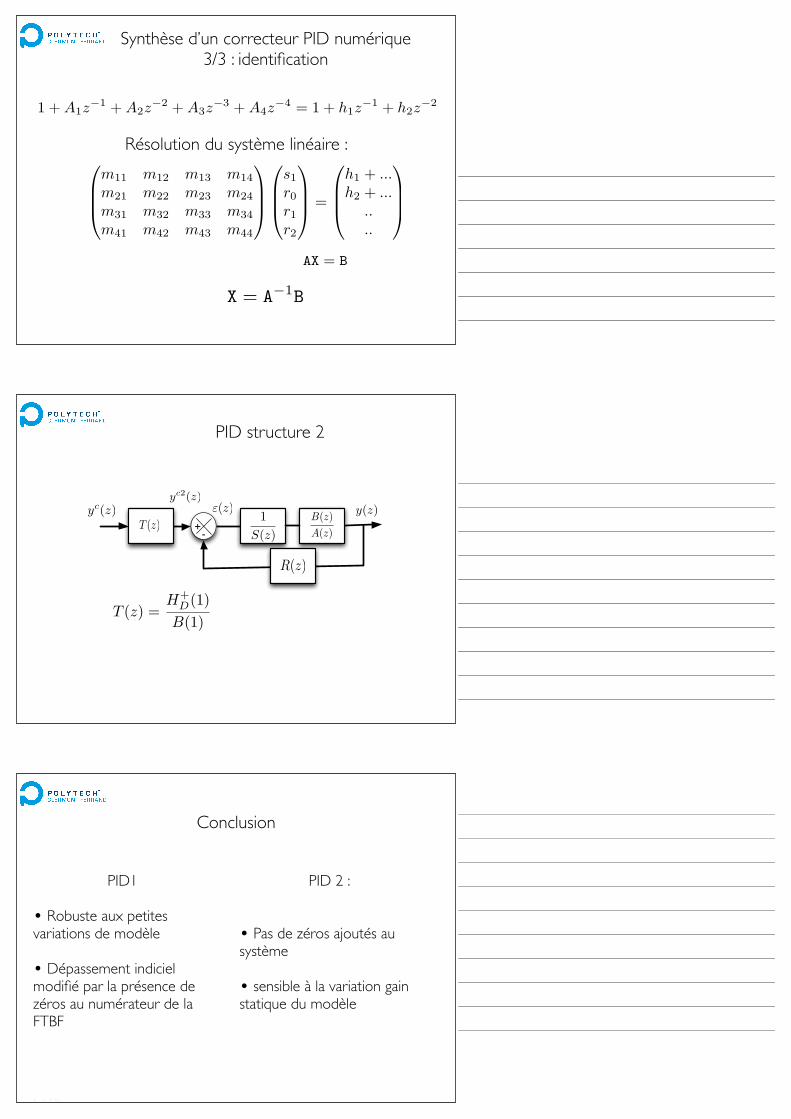
Synthèse d’un correcteur PID numérique3/3 : identification
1 + A1z!1 + A2z
!2 + A3z!3 + A4z
!4 = 1 + h1z!1 + h2z
!2
Résolution du système linéaire :
AX = B
X = A!1B
!
""#
m11 m12 m13 m14
m21 m22 m23 m24
m31 m32 m33 m34
m41 m42 m43 m44
$
%%&
!
""#
s1
r0
r1
r2
$
%%& =
!
""#
h1 + ...h2 + ...
..
..
$
%%&
PID structure 2
yc(z) y(z)+-
!(z)B(z)A(z)
R(z)
1S(z)
T (z)
yc2(z)
T (z) =H+
D(1)B(1)
PID1
• Robuste aux petites variations de modèle
• Dépassement indiciel modifié par la présence de zéros au numérateur de la FTBF
Conclusion
PID 2 :
• Pas de zéros ajoutés au système
• sensible à la variation gain statique du modèle

Exercice d’application
Correction d’un système d’ordre 1 avec retard.
yc(z) y(z)+-
!(z)B(z)A(z)
R(z)
1S(z)
T (z)
yc2(z)
!GB0(z) =B(z)A(z)
pour Te = 1sCalculez la transmittance bloquée
On veut un dépassement inférieur à 5% et un temps de pic de 4 secondes
G(p) =e!p
1 + 3p
Calculez le correcteur PID correspondant (structure 1 et structure 2)