Student Lecture Notes Part-I 476 CSULB
33
1 Lecture 1 Introduction 1. Control: 2. Regulation: 3. Tracking: EX. TANK LEVEL CONTROL (REGULATION) l(t) l R (t) Tank Level Leak Rain Evaporation Control Valve • Controlled variable: • Manipulated variable: • Setpoint:
description
CSULB 476 Lecture Notes
Transcript of Student Lecture Notes Part-I 476 CSULB

1
Lecture 1
Introduction
1. Control:
2. Regulation:
3. Tracking:
EX. TANK LEVEL CONTROL (REGULATION)
l(t)
lR(t)
Tank Level
Leak
RainEvaporation
Control Valve
• Controlled variable:
• Manipulated variable:
• Setpoint:

2
EX. MISSILE DEFENSE SYSTEM (TRACKING)
θR(t)
θ(t)
gear/platform
• Controlled variable:
• Manipulated variable:
• Tracking error:
4. Block diagram:
ControlSystem
Motor andPlatform Dynamics
θR(t)
input
v(t)
control
θ(t)
output
5. Feedback:
6. Closed-loop system:
7. Open-loop system:

3
EX. TYPICAL WASHING MACHINE CONTROLS (OPEN-LOOP)
Preset washingmachine controls
(Normal, Delicate, etc.)
Washing machineDynamics
dR(t) d(t)
Desired amountof dirt in laundry
u1(t)
un(t)
::
Various machinecontrol signals Actual amount
of dirt in laundry
open-loop: no means of measuringhow well machine is performing ...
In this course, we learn to design model-based control systems for various mechanical/electrical
systems.
8. Disturbance:
EX. DISTURBANCE – WIND FORCES ON OUR MISSILE DEFENSE SYSTEM
ControlSystem
DC MotorDynamics
PlatformDynamics
yr +_e u τ + +
τd
y
motor torque(actuation)
wind torque(disturbance)
9. Sensor (measurement) dynamics:
10. Noise:

4
What is a Control System? (Draw a block diagram to represent a control
system)

5
Lecture 2
Topics covered in this lecture:
1. System modeling in ODE, TF, SS forms and conversion among them
2. Simplification of block diagrams
Dynamic System Models
1. System Representations – four totally equivalent models of linear systems
• Ordinary Differential Equations (ODE)
• Transfer Functions (TF) – classical control representation
Derived using Laplace transform with zero initial conditions
A ratio of output(s)/input(s)
• State Space (SS) – modern control representation
BuAxx +=&
x – n dimensional state vector
A – n×n dimensional state matrix
u – m dimensional input vector
B – n×m dimensional input matrix
DuCxy +=
y – r dimensional output vector
C – r×n dimensional output matrix
D – r×m dimensional direct transmission matrix
• Block Diagram (BD) – a graphical representation in the s domain
2. Modeling Mechanical Systems – Newton’s Second Law
• Translating
• Rotating
• Elements:
EX. A SIMPLE SYSTEM: CRUISE CONTROL
Assumption: 1) No rotational inertia of the wheel
2) The friction force is proportional to the car’s speed
Find: 1) EOM
2) TF (with velocity as an output)
3) SS (with displacement as an output)

6
Solution:
3. Modeling Electrical Systems
• Kirchoff’s Voltage Law 0=∑ iV (circuit loop)
• Kirchoff’s Current Law 0=∑ ji (current node)

7
• Elements:
4. Modeling Electromechanical Systems
EX. MODELING A DC MOTOR
Find: 1) ODE 2) SS (with angular velocity as an output) 3) TF
Solution:

8
Block Diagram
a) Recall from the first lecture: a functional schematic showing the major components and
interconnections of a control system.
b) If the blocks contain TFs, a BD is another totally equivalent linear system representation
(BDs are s-domain representations)
c) BDs are especially useful system representations
• They are graphical (intuitive)
• They are algebraic (due to ‘s’)
• Model simulation programs (Simulink incorporate them directly)
d) Block Diagram Algebra:
Converting from BDs to TFs is not quite as easy, but a handful of rules (block diagram
algebra) make it straightforward.
Rule 1 Blocks in Series
Equivalent TF:
EX. BLOCK DIAGRAM FOR OPEN LOOP CONTROL SYSTEM
Find: the open loop TF
Solution:
Rule 2 Blocks in Parallel
Equivalent TF:
Rule 3 Negative Feedback
_
+ E(s) Y(s) Yr(s) G(s)
Y(s) U(s)
G1(s)
G2(s)
Y(s) Yr(s) s
KKC(s) i
p += 1
1
+sτ
Y(s) U(s) G1(s) G2(s)

9
Rule 4 Feedback with Sensor Dynamics (Negative Feedback)
EX. TRANSFER FUNCTION FROM A SIMPLE BLOCK DIAGRAM
+ +
_
+ Y R
s
4
2
s
1
_
+ E(s) Y(s) Yr(s)
G(s)
H(s)

10
EX. SIMPLIFY INTERCONNECTED BD LOOPS
Solution:
+ +
_
+ Y R
G(s)
H2(s)
H1(s)

1
Lecture 3-4
Topics covered in this lecture:
1. Concepts of poles, zeros and stability
2. Transient responses of first-order and second-order systems
Poles and Zeros
Recall that any linear system can be expressed as a transfer function, which is an output/input
ratio of polynomials in s:
011
1
011
1
)(
)()(
asasasa
bsbsbsb
sa
sb
input
outputsH
nn
nn
mm
mm
++++
++++===
−−
−−
L
L=
Where n ≥ m (for a proper TF), and ai and bj are constant coefficients.
a). Zeros:
b). Poles:
c). Stability of Linear Control System
A Linear Time Invariant (LTI) system is stable iff
EX. EVALUATE STABILITY
Given the system’s TF as
)2)(5.0(
5.0)(
+−
+=
sss
ssG
What are the sytem’s zeros and poles? Is the system stable? Why or why not?
EX. EVALUATE STABILITY
Given: A feedback control system with a proportional controller as shown
Find the closed-loop system’s poles and zeros, and determine the closed-loop system’s stability
for K =10, K=5 and K=1.5, respectively.
Solution:
_ +
R(s) K
sss
ssG
−+
+=
23 5.1
5.0)( Y(s)

2
%MATLAB commands
>> K = 5 %input the K value; try K=5, 10, or 15 >>num = K*[1 0.5] %define the numerator polynomial of the TF
>>den = [1 1.5 K-1 0.5*K] %define the denominator polynomial of the TF
>>sysTF = tf(num, den) %define system’s TF
>>roots(den) %find poles
>>pole(sysTF) %find poles
>>roots(num) %find zeros
>>zero(sysTF) %find zeros
>>pzmap(sysTF) %display the poles and zeros on s-plane
>>step(sysTF) %find system’s response for a unit step input
Analysis of Linear Systems
– Given a linear system model, how does this model respond with time for an input?
How to find a system’s response?
1). Solve ODE analytically
2). Use Inverse Laplace Transform (ILT) (by using Laplace Transforms Tables)
3). Use Numerical Integration, e.g. MATLAB simulink
EX. FINDING TIME RESPONSE USING INVERSE LAPLACE TRANSFORM
Given: the first-order linear model
ODE: )(5 tuyy =+& 5
1
)(
)( :
+=
ssU
sYTF
for the input u(t)= ustep(t), with zero initial condition y(0) =0.
Solution:
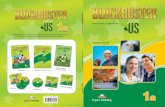
0 5 10 15-1
-0.5
0
0.5
1
1.5
2
2.5
3Step Response
Time (sec)
y
Kp=1.5
Kp=5
Kp=10

3
%MATLAB commands
>> num = [1];
>> den =[1 5];
>> sysTF = tf(num,den);
>> step(sysTF,5)
>> hold
>> t=[0:0.1:5];
>> y = 0.2- 0.2*exp(-5*t);
>> plot(t,y,'-o')
Use Matlab/simulink: download the simulink model from \Beachboard\content\matlab folder
Transient Responses of Linear Systems 1. Introduction
We can analyze the transient response (overshoot, settling time, etc.) by solving for y(t), but it
is much easier to understand how transient response relates to pole locations.
2. First-Order System
Standard form of a first-order system:
Unit Step Response of First-Order Systems
Since the Laplace transform of the unit-
step function iss
1, we obtain
=)(sY
Express Y(s) into partial fractions gives
=)(sY
Taking the inverse Laplace transform,
we obtain
=)(ty

4
• Transient response of first-order systems – think in terms of the s-plane
EX. SYSTEM WITH TWO SIMPLE REAL POLES
Given: A system model )10)(1(
1
)(
)(
++=
sssU
sY
Find: The time response of this system to a unit step input.
Solution:
%Matlab t=[0:0.1:4]; y = 0.1-0.111*exp(-
t)+0.0111*exp(-10*t); y2 = 0.1-0.111*exp(-t); figure plot(t,y) hold plot(t,y2,'--')
y3 = exp(-t); y4 = exp(-10*t) figure plot(t,y3) hold plot(t,y4,'--')
0 0.5 1 1.5 2 2.5 3 3.5 4-0.02
0
0.02
0.04
0.06
0.08
0.1
time (s)
Response
y=0.1-0.111*e(-t)
+0.0111*e(-10t)
y2=0.1-0.111*e(-t)
0 0.5 1 1.5 2 2.5 3 3.5 40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
time (s)
Res
po
nse
e(-t)
e(-10t)

5
3. Second-Order System
Standard form of a second-order system:
(a)
(b)
EX. Given a second-order linear system model )()(500)(50)(5 tFtxtxtx =++ &&&
Find: The natural frequency and damping ratio for this system.
Solution:
(c) Second order systems have two poles, which can be computed using quadratic equation.
Case 1: Overdamped Response: ζ >1.0
If 012 >−ζ , then 12 −ζ is a real number, and the system doesn’t have complex
conjugate poles. It has two simple, real poles.
EX. STEP RESPONSE OF AN OVERDAMPED SECOND-ORDER SYSTEM
22
2
2)(
)()(
nn
n
ssU
sYsG
ωζω
ω
++==
)1)(1( 22
2
−−+−++=
ζωζωζωζω
ω
nnnn
n
ss
)1)(1(
1)(
22
2
−−+−++=
ζωζωζωζω
ω
nnnn
n
ssssY
−
−+=
−−
212
21
121)(
s
e
s
ety
tstsn
ζ
ω
Where ns ωζζ )1( 21 −+= and ns ωζζ )1( 2
2 −−= .
The response includes two decaying exponential terms.

6
Case 2: Critically Damped System: ζ =1.0
If 012 =−ζ , then the system poles are repeated and np ω−=2,1 .
The unit step response is )1(1)( tety n
tn ωω +−= −
Case 3: Underdamped Response: ζ <1.0
EX. STEP RESPONSE OF AN UNDERDAMPED SECOND-ORDER SYSTEM
22
2
2
1)(
nn
n
sssY
ωζω
ω
++=
2222)()(
1
dn
n
dn
n
ss
s
s ωζω
ζω
ωζω
ζω
++−
++
+−=
Taking inverse Laplace gives
−+
−−= −
−
ζ
ζω
ζ
ζω 21
2
1tansin
11)( t
ety d
tn
, ζ <1.0
By setting the natural frequency nω =constant, use Matlab command plot to plot
the step responses for a standard 2nd
order system for different damping ratio
values ζ =[0:0.1:1 2].
Use Matlab/simulink: download the simulink model from \Beachboard\content\matlab folder

7
(d) Responses can be easily predicted by viewing pole locations in the s-plane.
In summary: the stability and transient response characteristics are completely determined by pole
locations.

1
Lecture 5
Topics covered in this lecture:
1. Relate time-domain specifications (rise time, settling time, overshoot, etc.) to pole locations
in s-domain;
Time-Domain Specifications
1. Rise Time rt :
2. Settling Time st :
3. Overshoot pM :
4. Peak Time pt :
Note: Second-Order System 22
2
2)(
)(
nn
n
sssU
sY
ωζω
ω
++=
Step Response
−+
−
−=−
−
ζ
ζω
ζ
ζω 21
2
1tansin
11)( t
ety d
tn
+−=
−tte d
d
dt
ωω
σω
σ sincos1
Steady State Value: yss = ?
Relate time-domain specifications to the pole-location parameters ζ and nω

2
Rise Time ≅rt
Overshoot and Peak Time: =pM
tp =
+−=
−ttety d
d
dt
ωω
σω
σ sincos1)(
When y(t) reaches its maximum value at peak time, its derivative will be zero.
+−−
+=
−−ttettety dd
d
ddt
d
d
dt
ωωω
σωωω
ω
σωσ
σσ cossinsincos)(&
tetetete ddt
d
d
tdd
d
td
tωωω
ω
σσωω
ω
σωσ
σσσσ sinsincoscos −−−−++−=
te dd
d
tωω
ω
σσsin
2
+=
−= 0
Note: This occurs when 0sin =tdω .
So πω =pd t � d
ptω
π=
The overshoot 21
sincos1)(ζ
ζπ
ω
σπ
πω
σπ
−
−−
=
+=−= eetyM
d
ppd 10 <≤ ζ

3
Settling Time: =st for ∆=2%; =st for ∆=5%;
Design Synthesis:
Note: (a) Qualitative guides, not precise design formulas;
(b) Providing only a starting point for the design iteration;
(c) Checking time response to verify the time specifications after control design.

4
EX. TRANSFORMATION OF THE SPECIFICATIONS TO THE S-PLANE (EX. 3.27)
Given: system response requirements 6.0≤rt sec, %10≤pM , and 3≤st sec
Find: (a). allowable regions in the s-plane for the poles;
(b). select a pair of poles in the design region in (a) and construct the corresponding
standard 2nd
order TF;
(c). use the MATLAB command “step()” to verify your selection.
Solution:

1
Lecture 6
Topics covered in this lecture:
1. Learn the concept of system type
2. Learn the relationship between system type and steady-state error
System Type
Consider a unity-feedback control system
The open-loop transfer function
)1()1)(1(
)1()1)(1()(
21 +++
+++=
sTsTsTs
sTsTsTKsG
pN
mba
L
L
System type:
EX. DETERMINE SYSTEM TYPE
Find: System Type if system’s open-loop TF is given as
(a) )3)(2(
)1(5
++
+=
sss
sG (b)
3
1)(
ssG =
Steady-state error
E(s) R(s) Y(s)
_ + G(s)

2
Test Signals:
EX. SYSTEM TYPE AND STEADY-STATE TRACKING ERROR
Given: the Type 1 system of the previous example
)3)(2(
)1(5
++
+=
sss
sG
Show: that its steady-state tracking errors are
(a) 0=sse for a unit step input
(b) =sse constant 0≠ for a unit ramp input
(c) ∞=sse for a unit parabolic input
Solution:

3
Steady-state error for a step Input
In general, the steady-state error of the system for a unit step input is
Define the Static Position Error Constant pK as
Thus, the steady-state error for the unit-step input can be summarized as follows:
Steady-state error for a ramp input
Define the Static Velocity Error Constant vK as
Thus, the steady-state error for the unit-ramp input can be summarized as follows:

4
Steady-state error for a parabola input
Define the Static Acceleration Error Constant aK as
Thus, the steady-state error for the unit-parabola input can be summarized as follows:
Step Input Ramp Input Parabola Input
Type 0
Type 1
Type 2
EX. STEADY-STATE ERROR AND SYSTEM TYPE WITH CONTROL
Given: A feedback control system
Determine: the steady-state error and the system type
(a) with pksC =)( (P control)
(b) with s
kksC I
p +=)( (PI control)
Solution:
(a) pksC =)(
(b) s
kksC I
p +=)(
E(s) R(s) Y(s) _
+ )15)(2(
1
++ ss C(s)

1
Lectures 7-8 Topics covered: 1. Discuss pros and cons of PID control 2. Learn to design PID controllers Feedback Control System PID Control (Three-Term Controller) 1. Proportional Control
kp G(s)R(s) Y(s)E(s) U(s)+
_
EX. STABILITY OF A THIRD-ORDER SYSTEM WITH P CONTROL
kp G(s)R(s) Y(s)E(s) U(s)+
_
Given: 6116
1
)3)(2)(1(
1)(
23
sssssssG ,
check the system stability for pk =1, 10, 40, 58, 61
Solution:

2
2. PI (Proportional Plus Integral) Control
G(s)R(s) Y(s)E(s) U(s)+
_ s
kk I
p
EX. STEADY-STATE ERROR FOR PI CONTROL: Given ))((
1)(
bsassG
3. PD (Proportional Plus Derivative) Control
G(s)R(s) Y(s)E(s) U(s)+
_skk Dp
EX. PD CONTROL OF A MARGINALLY STABLE SYSTEM
Given: 4
1)(
2
ssG
Determine: The closed-loop stability with PD control Solution:

3
4. PID (Proportional-Integral-Derivative) Control
G(s)R(s) Y(s)E(s) U(s)+
_sk
s
kk D
Ip
The effects of increasing each of the gains Kp, KI, KD of a PID controller can be summarized as Term Rise time Overshoot Settling time S.S. error
Kp
KI
KD
EX. P- & PD CONTROL DESIGN
Given: a second-order system )16(
4)(
sssG
1). Try to design a P-controller to satisfy the following performance requirements: Mp ≥ 10%, ts ≤ 0.4s for =2%; 2). Design a PD controller such that the response of the closed-loop system has an overshoot of less than 10% and rise time of faster than 0.1 seconds.
Solution:
Y(s) R(s) _ + )(sGskk Dp

4
PID Tuning Technique – Ziegler-Nichols Tuning Quarter Decay Tuning Examine a system’s open-loop unit step response.
P control: RL
k p
1
PI control: RL
k p
9.0
3.0
LTI
PID control: RL
k p
2.1 LTI 2 LTD 5.0
�
�
�
� � � � � �
� � � � � �
�
�

5
Ultimate Stability Technique
Examine a system’s closed-loop response using P controller only. Keep increasing pk until the
system goes marginally unstable. This gain is the ultimate gain uK . The period of oscillation is
the ultimate period uP .
P control up Kk 5.0
PI control up Kk 45.0 2.1u
I
PT
PID control up Kk 6.0 uI PT2
1 uD PT
8
1
Ex.
� �
�
�

1
Lecture 9
Topic covered in this lecture:
1. Review concept of stability
2. Determine stability using Routh’s stability criterion.
Stability – The most important and fundamental design specification of a control system
Consider a Linear Time-Invariant (LTI) system:
)(
)(
)(
)(
)(
)(
1
1
011
1
011
1
ini
imi
nn
nn
mm
mm
ps
zsK
asasasa
bsbsbsb
sa
sb
sU
sY
−Π
−Π=
++++
++++==
=
=−
−
−−
L
L where m ≤ n
Routh’s Stability Criterion
• An alternative to locating the roots of the CE without solving for the roots.
• Useful for determining the ranges of coefficients of polynomials for stability, especially when
the coefficients are in symbolic form.
Consider the characteristic equation of an nth-order system:
0)( 11
1 =++++= −−
nnnn
asasassa L
• A necessary (but not sufficient) condition for stability:
• A system is stable if and only if
Routh Array
Row n n
s :
Row n-1 1−n
s :
Row n-2 2−n
s :
M
Row 2 2
s :
Row 1 s :
Row 0 0
s :
The number of RHP (unstable) poles = the number of sign changes in the first column of the
Routh array.

2
EX. ROUTH’S TEST
Given the closed-loop C.E. of a control system as 010532)(234 =++++= sssssa
Check the stability of this system using Routh’s criterion
Solution:

3
EX. STABILITY VERSUS PARAMETER RANGE
Given:
The stability properties of the system are a function of the proportional feedback gain pK .
Determine: the range of pK over which the system is stable.
Solution:
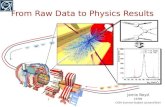
0 5 10 15-1
-0.5
0
0.5
1
1.5
2
2.5
3Step Response
Time (sec)
y
Kp=1.5
Kp=5
Kp=10
_ + Y(s) R(s) pK
)2)(5.0(
5.0)(
+−
+=
sss
ssG