Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds)...
141
STATECRUNCHER Test Models Graham G. Thomason Report Relating to the Thesis “The Design and Construction of a State Machine System that Handles Nondeterminism” Department of Computing School of Electronics and Physical Sciences University of Surrey Guildford, Surrey GU2 7XH, UK
Transcript of Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds)...
![Page 1: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/1.jpg)
STATECRUNCHER Test Models
Graham G. Thomason
Report Relating to the Thesis “The Design and Construction of a State Machine
System that Handles Nondeterminism”
Department of ComputingSchool of Electronics and Physical Sciences
University of SurreyGuildford, Surrey GU2 7XH, UK
July 2004
© Graham G. Thomason 2003-2004
![Page 2: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/2.jpg)
STATECRUNCHER Test Models
This document provides diagrams of STATECRUNCHER test models for testing STATECRUNCHER itself, (not for testing an “Implementation Under Test” of some other system). For most test models it will be clear what is being demonstrated or tested. To explain each model in detail, and to show its output, would multiply the size of this report by a considerable factor. That is not necessary, for two reasons: (1) the italicised annotations to the models are intended to clarify subtleties and (2) there is a manual/tutorial that discusses many of the models, often in a simpler form, as part of the training material. Most of the models are exercised in detail under program control in the test suite. The test suite provides an extra resource should it be necessary to see how the model is driven there.
ii © Graham G. Thomason 2003-2004
![Page 3: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/3.jpg)
Contents
1. Introduction.........................................................................................................................11.1 Categories of Models....................................................................................................11.2 Notation........................................................................................................................2
2. Testing the Compiler...........................................................................................................32.2 The Compiler Test Models...........................................................................................3
3. Testing the Validator...........................................................................................................53.1 Validator Coverage Aspects.........................................................................................53.2 Catalogue of Validator Error Messages as Written......................................................63.3 The Validator Test Models...........................................................................................8
4. Illustrative Examples........................................................................................................11
5. Testing the Machine Engine: Small Test/Demonstration Models....................................185.1 Small Deterministic Models.......................................................................................185.2 Small Nondeterministic Models.................................................................................32
6. Systematic Test Models....................................................................................................511.1 State Hierarchy and Initial Machine Entry.................................................................526.2 Specifying States in Transitions.................................................................................556.3 Deep Nesting..............................................................................................................576.4 Transition Selection....................................................................................................626.5 Orbits..........................................................................................................................646.6 Common Tree Removal.............................................................................................666.7 Scope of Enter/Exit Trees...........................................................................................676.8 Transition Course.......................................................................................................686.9 Exercising Nondeterminism.......................................................................................766.10 Finding Active Events................................................................................................796.11 Upon Exit/Upon Enter................................................................................................806.12 Exercising History......................................................................................................80
7. Stress Testing....................................................................................................................817.1 Axes of Stress Testing................................................................................................817.2 Model Generation.......................................................................................................817.3 Combinatorial Explosion and Limited Permutation...................................................82
8. Conventions......................................................................................................................98
9. STATECRUNCHER References......................................................................................99
© Graham G. Thomason 2003-2004 iii
![Page 4: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/4.jpg)
1. Introduction This document provides diagrams of STATECRUNCHER test models for testing STATECRUNCHER itself, (not for testing an “Implementation Under Test” of some other system). In addition to these test models, the STATECRUNCHER test suite contains many thousands of tests that do not require any model to be loaded. In fact such lower-level tests form the bulk of the tests for the internal logic and API (Application Programmer Interface). But from the point of view of demonstrating the system, interaction with complete models is most attractive, and a diagram of the model is by far the most expressive way to communicate the functionality being exercised.
The following diagram shows the processes applied to a model as it is compiled, validated and deployed in a testing tool chain such as TorX [http://fmt.cs.utwente.nl/CdR].
Figure 1. Compilation, Validation and Application to a Testing Tool Chain
More details of the parsing process are given in [StCrParsing]. Details of STATECRUNCHER as a whole are given in [StCrMain].
STATECRUNCHER is currently implemented in PROLOG. STATECRUNCHER's own syntax is independent of PROLOG, but occasionally a remark reflects the implementation language. The PROLOG-based test harness used to self-test STATECRUNCHER is described in [StCrGP4].
For most test models it will be clear what is being demonstrated or tested. To explain each model in detail, and to show its output, would multiply the size of this report by a considerable factor. The italicised annotations to the models are intended to clarify subtleties. Most of the models are exercised in detail under program control in the test suite. The test suite provides an extra resource should it be necessary to see how the model is driven there.
1.1 Categories of ModelsThe models fall into various categories, in order to satisfy testing requirements per phase during development: Models designed to test the compiler, but ignoring validator and run-time (machine
engine) considerations
© Graham G. Thomason 2003-2004 1
Model Compiler Validator TorXMachine Engine
![Page 5: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/5.jpg)
Models designed to test the validator, but not aimed at machine-engine execution. The validator is a kind of back-end to the compiler; it generates a symbol table, cross reference table, and initial data predicates (settings).
Miscellaneous example models (e.g. as used in demonstrations and reports), but not attempting any systematic coverage of functionality
Models designed to demonstrate the run-time machine engine - (1), a feature-by-feature approach, in an illustrative or didactic way, but without attempting to cover every detail.
Models designed to systematically test the run-time machine engine - (2), where a more structured testing approach has been taken.
Model numberingModels are numbered by an index such as t4120 or c2117. In the ci_sc_1.pl module, a link is set between model number and filename (including path). An example of such a link, using relative path addressing with respect to a ‘root’ path defined in the boot file, is ci_file(t5110,'..\StCr3ModelsTest\t5000me\t5110_HelloWorld\HelloWorld').
Any one file can be made active for compiling, validating and exercising by setting ci_current(model-index) in the ci_sc_1.pl file.
File ci_sc_1.pl and indices of the kind tnnnn are reserved for test-suite models and are part of the formal STATECRUNCHER release. The user can define more files, e.g. in ci_sc_2.pl, using an index such as the cnnnn range. The default ci_current(model-index) setting should only be defined once and is defined in file ci_sc_1.pl.
The numbering is as follows t2000 series: compiler tests t3000 series: validator tests t4000 series: miscellaneous examples t5000 series: machine engine demonstrations t6000 series: machine engine systematic tests t7000 series: stress tests
1.2 NotationUML now (v1.5) describes a detailed notation for diagrams, but this report differs in respect of certain features: on entry to a state (UML “entry/”) is a solid triangle pointing in to the state, e.g.
on exit from a state (UML “exit/”) is a solid triangle pointing out of the state, e.g.
events declared in a part of the hierarchy are denoted by the symbol , e.g.
variables are declared in a part of the hierarchy by the symbol, e.g.
PCOs (Points of Control and Observation) are declared by the symbol , e.g.
2 © Graham G. Thomason 2003-2004
v=6
v=6
ζ1
pco1
v=6
![Page 6: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/6.jpg)
2. Testing the Compiler
2.1.1 Compiler coverage aspectsThe compiler is mainly concerned with syntax rather than issues of legality of use, such as whether an item has been declared, which are checked by the validator. An exception is that the compiler is concerned about a proper hierarchical structure of the statechart, and it will produce an error message (and stop compiling) if there are inconsistencies in the hierarchical structure.
Most situations of erroneous STATECRUNCHER syntax result in a parse where the error is tagged in the parse tree. These situations are extensively tested in lower level tests without using a model. Such tests are not described here. The models are a system test on the compiler, covering its ability to report the main kinds of error and to proceed appropriately.
The compiler recognises three levels of correctness/error statement with no errors statement with local errors tagged in the parse tree failed statement - the statement could not be parsed at all
Test areas Brackets errors States and the statechart hierarchy: clusters, sets, leafstates Declaration statements (PCOs, events, tags, variables) I/O stress: multiple line statements, long files.
2.2 The Compiler Test ModelsHere we consider the test aims and error circumstances.
Table 1. Compiler test models
Model (directory) name Test aimt2110_braces_er Error reported on mismatched bracest2120_round_brack_er Error reported on mismatched round bracketst2130_square_brack_er Error reported on mismatched square bracketst2210_state_ok Correct handling of a simple state statementt2211_state2_ok Correct handling of a more state statementst2215_state_er Detection of errors in state statements
© Graham G. Thomason 2003-2004 3
![Page 7: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/7.jpg)
t2220_cluster_ok Correct handling of a cluster statementst2225_cluster_er Detection of errors in cluster statementst2230_set_ok Correct handling of a set statementst2235_set_er Detection of errors in set statementst2240_struct_ok Correct handling of a hierarchical statechart structuret2251_struct_er1 Error in hierarchy structure (1)t2252_struct_er2 Error in hierarchy structure (2)t2253_struct_er3 Error in hierarchy structure (3)t2254_struct_er4 Error in hierarchy structure (4)t2255_struct_er5 Error in hierarchy structure (5)t2310_decl_ok Correct handling of declarationst2315_decl_er Detection of errors in declarationst2320_split_stmt Handling of a statement split over several linest2330_medium A general medium complexity modelt2340_complex A general complex modelt2350_longfile Stress test on a long filet2360_longstmt Stress test on a long statement
These models are not put through the validator. The validator is tested independently.
4 © Graham G. Thomason 2003-2004
![Page 8: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/8.jpg)
3. Testing the Validator
3.1 Validator Coverage AspectsThe purpose of the validator is to generate certain tables and in so doing to detect certain errors. It generates a symbol table and a cross-reference table, and also a data table (containing variable values). For more information on these tables, see [StCrParsing]. Validator coverage is considered from the viewpoint of producing the error messages, and from source code error circumstances. This test approach largely verifies the correctness of the tables. Further testing of the correctness of the tables is done with machine engine tests (described in subsequent sections). The individual tests divide into tests for errors that are detected by symbol table construction and by cross-reference table construction.
Some symbol table coverage aspects states inbuilt-constants (true, false) tags variables PCOs events scoped use of the above double definition of the above
Some cross-reference table coverage aspects variable references in initialization of other variables variable references in actions
- upon enter action- upon exit action- transition assignment action
variable references in conditions variable references as terms of expression operators variable references in library function parameters (e.g. maximum) event references by transition event references by fired event state references by orbit state references by target state references by the in() function state references by the clear() function state references by the deep_clear() function
© Graham G. Thomason 2003-2004 5
![Page 9: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/9.jpg)
state references as terms of state-expression operators: :: $ . %% /\ PCO references by event declaration
3.2 Catalogue of Validator Error Messages as WrittenThe errors fall into the following categories warnings general errors: version incompatibility, compiler error detection type checking detection of non-implemented functions internal errors (diagnostic error – the program logic should preclude these)
Table 2. Validator error messageswrite('** Error (VA-E-001) ** Code is in testing mode: va_testing(yes)')write('** Error (VA-E-002) ** There are compilation errors')write('** Warning (VA-W-003) ** Multiple files loaded')write('** Error (VA-E-004) ** No "object" files loaded')write('** Error (VA-E-005) ** Version incompatibility')write('** Error (VA-E-006) ** Double definition of '), write(SYMB),write(':'),write(MPATH),write('** Error (VA-E-007) ** Uninitialized term(s) in initialization of '), write(SYMBOL),write(':'),write(MPATH),write('** Error (VA-E-008) ** Boolean value error initializing '), va_err_nltab, write(SYMBOL),write(':'),write(MPATH),write('.'), tab(1), write(VALUE),write(' not in '),write([0,1]),write('** Error (VA-E-009) ** String value error initializing '), va_err_nltab, write(SYMBOL),write(':'),write(MPATH),write('.'), tab(1), write(VALUE),write(' is not a string'),write('** Error (VA-E-010) ** Range error initializing '), va_err_nltab, write(SYMBOL),write(':'),write(MPATH),write('.'), tab(1), write(VALUE),write(' not in '),write([LOW,HIGH]),write('** Error (VA-E-011) ** Enum value error initializing '), va_err_nltab, write(SYMBOL),write(':'),write(MPATH),write('.'), tab(1), write(VALUE),write(' not in '),write(SET),write('** Error (VA-E-012) ** Undefined symbol '), va_err_nltab, write(DSYMBOL),write(':'),write(EPATH), va_err_nltab, write('in statement '),write(UTYPE),tab(1), write(USYMBOL),write(':'),write(UPATH),
6 © Graham G. Thomason 2003-2004
![Page 10: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/10.jpg)
write('** Error (VA-E-013) ** Undefined symbol of required type'), va_err_nltab, write(SYMBOL),write(':'),write(EPATH), tab(1), write('of type '),write(STYPE), va_err_nltab, write('in statement '),write(UTYPE),tab(1), write(USYM),write(':'),write(UPATH),write('** Error (VA-E-014) ** Polyvalent symbol (in overlapping scopes) '), write(SYMBOL), write(' is used of types '),write(SYMBOLTYPE), write(' and '),write(SYMBOLTYPE2), va_err_sep,write('** Warning (VA-W-015) ** Polyvalent symbol (but scopes are distinct) '), write(SYMBOL), write(' is used of types '),write(SYMBOLTYPE), write(' and '),write(SYMBOLTYPE2),write('** Warning (VA-W-016) ** Unreferenced symbol'), tab(1), write(DSYMBOL),write(':'),write(DPATH), va_wrn_nltab, write('of type '),write(DTYPE),
write('** Error (VA-E-017) ** Type mismatch in assignment '), va_err_nltab,tab(4),write('LHS-TYPE '),write(LHS), va_err_nltab,write('<assigned>'), va_err_nltab,tab(4), ( ( RHS=[typerr,OP,T1,T2], write('RHS-TYPE '),write(typerr), va_err_nltab,tab(12),write(T1), va_err_nltab,tab(8),write(OP), va_err_nltab,tab(12),write(T2) );( write('RHS-TYPE '),write(RHS) ) ), va_err_nltab, write('in statement '),write(UTYPE),tab(1), write(USYM),write(':'),write(UPATH),write('** Error (VA-E-018) ** Type mismatch in expression: '), va_err_nltab, ( ( DETAIL=[typerr,OP,T1,T2], tab(4),write(T1), va_err_nltab,write(OP), va_err_nltab,tab(4),write(T2) );( write(DETAIL) ) ), va_err_nltab,
© Graham G. Thomason 2003-2004 7
![Page 11: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/11.jpg)
write('in statement '),write(UTYPE),tab(1), write(USYM),write(':'),write(UPATH),write('** Error (VA-E-019) ** Non-implemented function: '), write(FUN),write('*** Internal Error (VA-I-500) *** va_write_pred '), write(PRED),
A “polyvalent” symbol is one that is used for two or more different kinds (e.g. an integer and an event). This is tolerated with a warning if the scopes are distinct. If the scopes overlap, then an error is given, since symbol-table look-up (based on symbol and current scope) is ambiguous – more than one entry could be returned as being in scope. This is a separate issue to that of allowing a symbol to be used for two or more different scopes. This is a legal situation which occurs where a symbol has several definitions, usually in of the same kind, but which are distinguished by their scope. Symbol-table look-up is unambiguous, since only the symbol with the innermost scope is taken.
The following are no longer in use: VA-E-001 (testing mode is no longer needed) and VA-E-012 (superseded by VA-E-013). The program logic should prevent VA-I-500 from ever appearing. The remaining error messages are covered in the tests.
3.3 The Validator Test ModelsHere we consider the test aims and error circumstances.
Table 3. Validator test models
Model (directory) name Test aimt3020_cp_er Validator error if compiler gave an errort3031_mult_file1 Validator warning if multiple compiled files loadedt3032_mult_file2 (used to produce a second file for above)t3040_no_obj Validator error if no object file loadedt3050_vers_incompat Validator error if file was compiled under an earlier versiont3110_tag_ok Tag names: normal correct usage, no errors t3115_tag_er Tag names: error situationst3120_var_bool_ok Boolean variables: normal correct usage, no errorst3125_var_bool_er Boolean variables: error situationst3130_var_string_ok String variables: normal correct usage, no errorst3135_var_string_er String variables: error situationst3140_var_tagrange_ok Tag-ranged variables: normal correct usage, no errorst3141_var_tagrange_med Tag-ranged variables: additional medium modelt3145_var_tagrange_er Tag-ranged variables: error situationst3150_var_tagenum_ok Tag-enumerated variables: normal correct usage, no errorst3151_var_tagenum_med Tag-enumerated variables: additional medium modelt3155_var_tagenum_er Tag-enumerated variables: error situationst3210_pco_ok PCOs: normal correct usage, no errors
8 © Graham G. Thomason 2003-2004
![Page 12: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/12.jpg)
t3215_pco_er PCOs: error situationst3220_evt_ok Events: normal correct usage, no errorst3225_evt_er Events: error situationst3230_sta_ok States: normal correct usage, no errorst3231_sta_basic States: additional modelt3235_sta_er States: error situationst3240_fun_ok Functions: normal correct usage, no errorst3245_fun_er Functions: error situationst3340_doubdef Extra double definition testst3360_polyvalent Polyvalent (overloaded) symbol warning/errorst3370_BasTypChk Basic Type checkingt3371_AdvTypChk Advanced type checkingt3910_stxr_ok A detailed model illustrating scoping issues
Figure 2 following shows a model that tests that items (tags, variables, events, states and PCOs) are correctly addressed where it is necessary to search from the given scope outwards in the state hierarchy (the outbound search). It especially tests variables and their declarations, and the declaration of their type. A worst-case scenario is as follows. A variable is used in an expression which is to be evaluated in a certain scope. The variable is operated on by scoping operators, giving a new evaluated scope of that variable. But the variable is not found in exactly that scope. However, it is found in a more global scope by the “outbound search”. This is the declared scope of the variable, although the declaration may have been made in a part of the hierarchy that has yet another scope, but using scoping operators so as to effectively declare as if in the part of the hierarchy that is the declared scope.
When a variable is declared, it has a type defined by the tagname, defining the enumerators or range. The tagname in a variable declaration is itself subject to an evaluated scope and declared scope analogously to the variable declaration.
State scopes can only be defined by means of the place of the state definition in the state hierarchy, but there can be several states of the same name. When a state is referenced, as with variables and tagnames, the effectively referenced state depends on any explicit scoping operations and then the outbound search.
© Graham G. Thomason 2003-2004 9
![Page 13: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/13.jpg)
Figure 2. Symbol/cross-reference table: To test tags/variables/events/states/PCOs.[Model t3910_stxr_ok] (stxr_ok=symbol table and cross-reference table ok)
Note: The exclamation marks draw attention to names are not part of any syntax.
10 © Graham G. Thomason 2003-2004
z1
r
z2
p
st1
q
t2 (!)
tagname refersto here
but defined for this scope
variableactually declared
here
but tag defined
here
but defined for this scope
variable usagehere
but referring
to here
another tag
PCO
state-u
event-u
bool-ubool-rbool-cbool-d
enum-range
enum-valns
another bool
another event
another PCO
range-rrange-crange-dtag-rtag-ctag-d
valns-rvalns-cvalns-dtag-rtag-ctag-d
another range
another valns
PCO
state-r
event-r
PCO
state-cd
event-c
PCO
event-d
v t4 (!)
cannot declare a foreign-scoped state
addit-ional usagehere
referring to here
t5 (!)another local set of variables etc here
Note: t1 t2 t4 t5 all refer to the same name 't'.
z3
y1
split operator
upon exitupon enter
t.η$$γ
α $β $$γ $$$$ε $$$$ζ
$$$δ
statechart sc
![Page 14: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/14.jpg)
4. Illustrative Examples
These models include examples that have been used in various reports.
The Obj_example model that illustrates object code structure, as exhibited in the STATECRUNCHER maintenance handbook (no diagram).
The Tie example of [StCrParsing], (no diagram). The Tuner-Hop example of a Philips report on component binding1, p.30 (diagram
follows, Figure 3), modelled by Tim trew. The Traces example in the Transfer Report (diagram follows, Figure 4). The transfer
report is a deliverable of the author's PhD registration at the University of Surrey. A Program Installation model by Tim Trew, for determining the station ID during TV
program installation. In this case, the generation of teletext packets is not directly under control of the test harness, and the result of the sequences that might be received is predicted through the genPckts state, which exhibits iterative fork nondeterminism on the next_pkt event (diagram follows, Figure 5).
1G G ThomasonComponent Binding in Composite Models for State-based TestingPRL Technical Note TN 4102, August, 2001
© Graham G. Thomason 2003-2004 11
![Page 15: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/15.jpg)
Figure 3. Tuner-Hop (modelled by Tim Trew) [model t4130]
Note colour coding per local event in a component, for Tuner and Hop.
12 © Graham G. Thomason 2003-2004
Composition
Tuner
Green
DropRequestProcessing
Red
Orange
RestoreProcessing
EnvChange / fire CallDropRequest
EnvChange
EnvRestore/fire CallRestore EnvChange
ReturnDropRequestAccepted [MANUAL_TUNER]
CallDropAcknowledge[MANUAL_TUNER] /
fire ReturnDropAcknowledgeReturnDropRequestPending
Hop
ReturnRestore
Green Orange
Red
DropAckProcessing2
CallDropRequest [MANUAL_HOP] /fire ReturnDropRequestPending
EnvAck/fire CallDropAcknowledge
CallRestore/ fire ReturnRestore
ReturnDropAcknowledge
ReturnDropAcknowledge
CallRestore / fire ReturnRestore
CallDropAcknowledge[AUTO_TUNER]/fire CallRestore,
fire ReturnDropAcknowledge
CallDropRequest [AUTO_HOP] /fire ReturnDropRequestAccepted
ReturnDropRequestAccepted [AUTO_TUNER] /
fire CallRestore
DropAckProcessing1
control
setat / AUTO_ TUNER=true; MANUAL_ TUNER=false;
setmt / AUTO_ TUNER=false; MANUAL_ TUNER=false;
setah / AUTO_ HOP=true; MANUAL_ HOP=false;
setmh / AUTO_HOP=false; MANUAL_ HOP=true;
![Page 16: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/16.jpg)
Figure 4. Traces example in transfer report [Model t4140]
© Graham G. Thomason 2003-2004 13
a
i
j
x y
p
q
sys
α{trace(2)}
α
β{trace(8)}
β{trace(7)}
γ
b
c
β{trace(8)}
β{trace(8)}
α{trace(3)}
![Page 17: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/17.jpg)
Figure 5. Program Installation (modelled by Tim Trew) [model t4150]
The model produces sequences of packets by fork nondeterminism.
14 © Graham G. Thomason 2003-2004
acquiringTXT
genPkts
fire next_pkt
next_pkt[pkt_cnt<maxPkts]{fire ni830; pkt_cnt++;}
next_pkt[pkt_cnt< maxPkts] {fire cni830; pkt_cnt++;}
next_pkt[pkt_cnt< maxPkts]{fire cni_vps; pkt_cnt++;}
next_pkt {fire timeout; pkt_cnt++;}
gotCNI830
waitingForPkt
gotNI830
high
low
name_source="none"
ni830{name_source="ni830";}
cni830{name_source="cni830";}
tvSystemDetectWait
searching
tvSys
tv_system_found
timeout
cni_vps{name_source="cni_vps";}
station_found
pkt_cnt=0;deep_clear(acquiringTXT);
![Page 18: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/18.jpg)
Output from this model
The model is driven by turning set-transit nondeterminism off and processing event tv_system_found. This can be done interactively, or in a Prolog predicate as follows, where an output file is written in the same directory as the model.
This produces an output file ProgInst.out.txt. To reduce the output to the essentials (occupied leafstates and key variables), a grep command was executed on it as follows:
© Graham G. Thomason 2003-2004 15
go_t4150:- me_no_set_tran, /* turn set-transit ND off */ ci_file(t4150,LOCAL_FILE_NO_EXTN), /* get model file name */ gn_append_atoms(LOCAL_FILE_NO_EXTN, '.out.txt',LOCAL_FILE_W_EXTN), /* add an extension to file name */ boot_root(sc,BOOT_ROOT), /* get boot directory */ gn_append_atoms(BOOT_ROOT, LOCAL_FILE_W_EXTN,FULL_FILE), /* make full file name */ io_tell(FULL_FILE), /* set output to go to this file */ cs_go(t4150), /* load and enter machine */ ut_wm,nl, /* write machine */ EVENT=[tv_system_found,[sc]], /* this is the event to process */ CALPRARAMS=[], /* no parameters to this event */ write('About to process '),write(EVENT),nl,nl, TASK=[tk_event,[EVENT,CALPARAMS]], /* wrap the event as a "task" */ db_worldbag(INWORLDS), /* get the current worlds */ me_process_task_in_worlds(TASK,INWORLDS,OUTWORLDS), /* process task */ da_kill_old_worlds, /* kill intermediate worlds */ ut_wm, /* write machine again */ io_told. /* close the file */
grep -E "(leafstate.*s_occ|name_source|pkt_cnt|^$)" ProgInst.out.txt > grep_out.txt
![Page 19: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/19.jpg)
The output (with minor editorial refinements) is as follows
With set transit nondeterminism switched on, the following additional output is obtained (due to the action on genPkts being executed prior to the action on waitingForPkt.
16 © Graham G. Thomason 2003-2004
SET TRANSIT NONDETERMINISM SWITCHED OFF
9 leafstate searching [tvSys, sc] [s_occ, []] **9 VAR name_source [sc] [vardecl, [string]] =[ex_str, [110, 111 etc]] =none9 VAR pkt_cnt [sc] [vardecl, [enumtype, [int1, [sc]]]] =[ex_co, int, 1]
14 leafstate searching [tvSys, sc] [s_occ, []] **14 VAR name_source [sc] [vardecl, [string]] =[ex_str, [99, 110 etc]] =cni_vps14 VAR pkt_cnt [sc] [vardecl, [enumtype, [int1, [sc]]]] =[ex_co, int, 1]
22 leafstate searching [tvSys, sc] [s_occ, []] **22 VAR name_source [sc] [vardecl, [string]] =[ex_str, [99, 110 etc]] =cni83022 VAR pkt_cnt [sc] [vardecl, [enumtype, [int1, [sc]]]] =[ex_co, int, 2]
27 leafstate searching [tvSys, sc] [s_occ, []] **27 VAR name_source [sc] [vardecl, [string]] =[ex_str, [99, 110 etc]] =cni_vps27 VAR pkt_cnt [sc] [vardecl, [enumtype, [int1, [sc]]]] =[ex_co, int, 2]
33 leafstate searching [tvSys, sc] [s_occ, []] **33 VAR name_source [sc] [vardecl, [string]] =[ex_str, [99, 110 etc]] =cni83033 VAR pkt_cnt [sc] [vardecl, [enumtype, [int1, [sc]]]] =[ex_co, int, 3]
38 leafstate searching [tvSys, sc] [s_occ, []] **38 VAR name_source [sc] [vardecl, [string]] =[ex_str, [99, 110 etc]] =cni_vps38 VAR pkt_cnt [sc] [vardecl, [enumtype, [int1, [sc]]]] =[ex_co, int, 3]
44 leafstate searching [tvSys, sc] [s_occ, []] **44 VAR name_source [sc] [vardecl, [string]] =[ex_str, [99, 110 etc]] =cni83044 VAR pkt_cnt [sc] [vardecl, [enumtype, [int1, [sc]]]] =[ex_co, int, 4]
81 leafstate searching [tvSys, sc] [s_occ, []] **81 VAR name_source [sc] [vardecl, [string]] =[ex_str, [110, 105 etc]] =ni83081 VAR pkt_cnt [sc] [vardecl, [enumtype, [int1, [sc]]]] =[ex_co, int, 2]
117 leafstate searching [tvSys, sc] [s_occ, []] **117 VAR name_source [sc] [vardecl, [string]] =[ex_str, [110, 105 etc]] =ni830117 VAR pkt_cnt [sc] [vardecl, [enumtype, [int1, [sc]]]] =[ex_co, int, 3]
136 leafstate searching [tvSys, sc] [s_occ, []] **136 VAR name_source [sc] [vardecl, [string]] =[ex_str, [110, 105 etc]] =ni830136 VAR pkt_cnt [sc] [vardecl, [enumtype, [int1, [sc]]]] =[ex_co, int, 4]
158 leafstate searching [tvSys, sc] [s_occ, []] **158 VAR name_source [sc] [vardecl, [string]] =[ex_str, [110, 111 etc]] =none158 VAR pkt_cnt [sc] [vardecl, [enumtype, [int1, [sc]]]] =[ex_co, int, 4]
159 leafstate searching [tvSys, sc] [s_occ, []] **159 VAR name_source [sc] [vardecl, [string]] =[ex_str, [110, 111 etc]] =none159 VAR pkt_cnt [sc] [vardecl, [enumtype, [int1, [sc]]]] =[ex_co, int, 3]
160 leafstate searching [tvSys, sc] [s_occ, []] **160 VAR name_source [sc] [vardecl, [string]] =[ex_str, [110, 111 etc]] =none160 VAR pkt_cnt [sc] [vardecl, [enumtype, [int1, [sc]]]] =[ex_co, int, 2]
![Page 20: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/20.jpg)
Figure 6. Notification example [model t4152]
This model is discussed in [StCrMain].
© Graham G. Thomason 2003-2004 17
prog_inst
idle
start_tuning/fire
gen_notifs
n=4
tuned
gen_notifs / fire notif; n--; if (n>0) {fire gen_notifs;}
tuning
station_found
notif /trace(notif_msg)
gen_notifs
fork nondeterminism
here, we stop generating notifications
here, we generate more notifications
![Page 21: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/21.jpg)
5. Testing the Machine Engine: Small Test/Demonstration Models
Ideally, each model would be accompanied by a full explanation, and by the test scripts with expected output. However, space does not permit. The title of each model indicates what is being demonstrated or tested. The test scripts are part of the STATECRUNCHER delivery (see directory am_sc). The diagrams give the general reader an overview of STATECRUNCHER
functionality and the extent of testing. But the main purpose of the diagrams is as a reference document, serving a certain tutorial function, for discussions amongst STATECRUNCHER users.
Variables and events will always be declared in the diagram if their scope is significant, otherwise their declaration will not necessarily be shown. See Section 1.2 for the notation.
The following models may contain more events and transitions than are marked, to provide direct access to all required states. We call these omega transitions – see Section 8.1.1
5.1 Small Deterministic Models
Figure 7. The hello world of state models [model t5110]
18 © Graham G. Thomason 2003-2004
statechart sc
a
aa
ab
β
α,γ
γ
![Page 22: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/22.jpg)
Figure 8. Parameterized, with conditions [models t5120, t5121, t5122, t5123]
© Graham G. Thomason 2003-2004 19
a
aa
abβ
α($b)[$b]
γ($v1,$v2)[$v1>$v2]ac
α($b)[!$b]
b,v1,v2
model t5122 statechart sc
The parameter destinations are at the scope of the cluster. Parameters to events on transitions from leafstates address their destinations using the parent operator, $.
a
aa
abβ
α(b)[b]
γ(v1,v2)[v1>v2]ac
α(b)[!b]
b,v1,v2
model t5123 statechart scThe parameter destinations are local - but the destinations are not declared. From release 1.05, the outbound search technique will find the nearest-scoped variables. This arrangement can now be recommended.
The parameter destinations are local, at leafstate scope. Leafstate scope has to be declared at cluster level with a descend operator (e.g., in a, declare ac.v1), since there is no place in the syntax to declare at leafstate scope directly.
a
aa
ab βα(b)[b]
γ(v1,v2)[v1>v2] ac
α(b)[!b]b
v1,v2
model t5121 statechart sc
Variables are declared at cluster and leafstate scope.
From release 1.05, the outbound search technique will find the nearest-scoped variables.
In earlier releases, if the variable was not declared at the specified scope, a hidden variable was created.
a
aa
ab βα(b)[b]
γ(v1,v2)[v1>v2] ac
α(b)[!b]
b
v1,v2
model t5120 statechart sc
![Page 23: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/23.jpg)
Figure 9. Simple cluster transitions plus history [model t5130]
This model also illustrates internal and external self transitions on leaf states and nonleaf states.
20 © Graham G. Thomason 2003-2004
statechart sc
x
a1
a2
a
α
α
H
b1
b2
b
α
α
ε
ε ζ
ζ
η
ηθ
θδ1 δ2 δ5
δ6 δ7δ8
γ4γ3
δ3 δ4
β1 β2
γ1 γ2
β3β4
β5 β6
β7 β8
ι1
ι2
ι3
ι4
ω_a1{deep_clear(x);}
the ω transitions act as a reset or
set-state
ω_a2{deep_clear(x);}
ω_b1{deep_clear(x);} ω_b2
{deep_clear(x);}
![Page 24: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/24.jpg)
Figure 10. Set, but deterministic [model t5140]
Figure 11. Fired event, but deterministic [model t5150]
© Graham G. Thomason 2003-2004 21
s
zb
statechart sc
z ζ
ζ
y
p
qa1
a2
b1
ba
b2
α
α
za
b3
r
s
t
u
ππ ρ
ρτ
τγ
γ
β
δ
ε
θθ
s
b2
statechart sc
b β(bvp1,bvp2)[bvp1&&(!bvp2)]
a
b1
a2a1
β{fire α }
α{fire β(bv1,bv2)}
α
bv1=true; bv2=false
γ(bv2)
![Page 25: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/25.jpg)
Model t5150 explored
Figure 12. Fired event in series [model t5152]
22 © Graham G. Thomason 2003-2004
statechart sc
a
a1
α{fire β}
γ
a3a2
β
s
b2b β
a
b1
a2a1
β{fire α }
α{fire β}
α
s
b2b β
a
b1
a2a1
β{fire α }
α{fire β}
α
s
b2b β
a
b1
a2a1
β{fire α }
α{fire β}
α
s
b2b β
a
b1
a2a1
β{fire α }
α{fire β}
α
β - in 2 steps
α
INACCESSIBLE
β α - in 3 stepsα
β - in 3 steps
![Page 26: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/26.jpg)
Figure 13. Assignment on transition with overloaded variable names [model t5160]
Figure 14. Simple assignment on transition [model t5161]
© Graham G. Thomason 2003-2004 23
statechart sc
a
a1
α{$v+=3; $$v=$v+6;)}
γ(param){$v=param;}
v=1 i=0
v=2
a3
β{v+=3; $$v=v+6;)}
γ(param){v=param;}
exact scoping of local v
inexact scoping of local v
ι1{i+=1}
a2ι2{i+=10}
ι3{i+=100}
statechart sc
a
a1
α{i=i*10+1;}
i=0
a3
β
a2
ι{i=0;}
α{i=i*10+2;}
α{i=i*10+3;}
![Page 27: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/27.jpg)
Figure 15. Simple on-enter/ on-exit actions [model t5170]
Notes Variable v tracks a transition from p to q. Variable u tracks a transition from q to p. The fired event ζ1 is only executed in a transition exiting p2 or entering q2.
24 © Graham G. Thomason 2003-2004
statechart scs
p1
p2
p
α
α
u=u*10+4v=v*10+1
u=u*10+4v=v*10+1fire ζ1
u=u*10+3v=v*10+2
zz1 z2
ζ1
v reveals local order
q1
q2
q
α
α
v=v*10+4v=v*10+5u=u*10+1
v=v*10+4fire ζ1u=u*10+1
v=v*10+3u=u*10+2
a
γ
δ
β
γ
w=w*10+1 w=w*10+2
ζ2 {u=0;v=0;w=0;}
β
![Page 28: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/28.jpg)
Figure 16. Simple meta event (state entry/exit) [model t5180]
© Graham G. Thomason 2003-2004 25
s statechart sc
b
exit $a.a1
a
b1
a2a1
γ
α
p1
p2q1
exit $a.p
enter $a.r
enter $a.s
exit $a.q
pq
q2
q1a
q1b
q2bq2a
α
α
j2
j1
j3
j5
j4
j6
j
enter $a.a1
r1r
r2
r1a
r1b
r2br2a
s1
s2
s
α
α α
β
ββ
β
β
β
β
β
β
β
β
β
![Page 29: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/29.jpg)
Figure 17. Conditional actions and in() function [model t5190]
26 © Graham G. Thomason 2003-2004
s
z2
statechart sc
z
a
z1ζ2ζ1
tsetu(param) {u=param;}setv(param) {v=param;}setw(param) {w=param;}
conditionl action with else actionγ if (v%2==1){w=w*10+2; w=w*10+3;} else {w=w*10+4; w=w*10+5;}
δ if (v%2==1) {AC1} else {AC2}where
AC1= if (v==3) {w=w*10+1;} else {w=w*10+2;}AC2= if (v==4) {w=w*10+3;} else {w=w*10+4;}
ε if (v%2==1){fire ζ2;}
a1
conditional transitionα [in($z.z2)&&v==0]
unconditional transition, conditional actionβ if (in($z.z2)&&v==0){w=w*10+1;}
reset for next demo-transitionη {u=0;v=0;w=0;}
a2
if v>5 u=u*10+1else u=u*10+2
u=0 v=0 w=0
![Page 30: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/30.jpg)
Figure 18. History, Deep History and Clear Functions [model t5200]
© Graham G. Thomason 2003-2004 27
d
D
i
ijkN
k
j1π
π
π
c
α
β d1 j2
ρ
ρ
N j
e
statechart sc
ω
p
pqrD
r
q1π
π
q2
ρ
ρ
Nq
x
xyzH
z
y1π
π
y2
ρ
ρ
N y
s
τ1 {clear c.d)
τ2 {clear c.d.ijk}
τ3 {clear c.d.ijk.j}
τ4 {clear c.d.pqr}
τ5 {clear c.d.pqr.q}
τ6 {clear c.d.xyz}
τ7 {clear $.d.xyz.y}
κκ
τ1d {deep_clear c.d)
τ2d {deep_clear c.d.ijk}
τ3d {deep_clear c.d.ijk.j}
τ4d {deep_clear c.d.pqr}
τ5d {deep_clear c.d.pqr.q}
τ6d {deep_clear c.d.xyz}
τ7d {deep_clear c.d.xyz.y}
τ8 {clear c.d.fgh} τ8d {deep_clear c.d.fgh}
τ9 {clear c.d.fgh.g} τ9d {deep_clear c.d.fgh.g}
fgh
h1
h2π3
π3
Dh
D
g1
g2π2
π2
Hg
f1
f2π1
π1
Nf
γ
uvw
w1
w2π3
π3
Dw
N
v1
v2π2
π2
Hv
u1
u2π1π1
Nu
γ
δε
τ10 {clear c.d.uvw} τ10d {deep_clear c.d.uvw}
τ11 {clear c.d.uvw.v} τ11d {deep_clear c.d.uvw.v}
t
etc.
ω2{deep_clear($s);}
π
π
![Page 31: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/31.jpg)
Figure 19. Arithmetic (with scoping) [model t5210]
28 © Graham G. Thomason 2003-2004
a
etc.
p
statechart sc
Note that set members are leafstates, not clusters(so this is tested here)
s
v=3
v=6
α(param} {v=param;}α0 {v=0;}α1 {v++;}α2 {w=v++;}α3 {++v;}α4 {w=++v;}
b
etc.
c
etc.
w=0
α5 {w=v++ + +10;}α6 {v+=20;}
β(param} {$$v=param;}β0 {$$v=0;}β1 {$$v++;}β2 {w=$$v++;}β3 {++$$v;}β4 {w=++$$v;}
β5 {w=$$v++ + +10;}β6 {$$v+=20;}
γ1 {w=0;}γ2 {w=maximum(++v,++$$v);}γ3 {w=minimum(v++,$$v++);}
![Page 32: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/32.jpg)
Figure 20. Strings and String Functions [model t5220]
© Graham G. Thomason 2003-2004 29
statechart sc
p
q
s1="aA"
s1="zZ"
a1
etc.
α0($$s1,$$$s1,$$$s2) //direct parameter placementα1 {s1="abcdef";}α2 {s2="cd";}α3 {s1=s1+s2;}α4 {s1=s1-s2;}α5 {s1=s1*v;}α6 {s1=s1/3;} //illegal
b
etc.
c
etc.
α7 {s1="";}α8 // reservedα9
β(vparam} {v=vparam;} β0 {$$s1=s1+"xy";}β1 {$$s1=$$s1+s1;}β2 //reserved
γ1 {s1=upper_case(s1+"aA");}γ2 {s1=lower_case(s1+"zZ");}γ3 {v=length(s1);}
γ4 {s1=format(v,0)}γ5 {s1=format(v,3)}γ6 {s1=format(v,-3)}
a
a2α(sparam,vparam) [(sparam=="xy")&&(vparam==1)]
α
s2 v=3
Note that here$$s1 references sc.p.s1 (unlike the situation above, the difference being that this set member is a leafstate, not wrapped in a cluster).
Note that here$$$s1 references sc.p.s1 $$s1 references sc.p.q.s1
![Page 33: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/33.jpg)
Figure 21. Traces (deterministic) [model t5230]
Figure 22. Cycling [model t5240]
30 © Graham G. Thomason 2003-2004
statechart sc
p
ba
c
g
f
e
d
trace("ab",6)
ω1ω2{trace_clear();}ω3{trace_clear("clr");}
ω1
α {trace(2);}
γ {trace(v);}
δ {trace(v+1);}
ε trace("cd",5,-7);}
ζ
β (trace(true);}
as
b2
β2 {v--; trace(v+10,"d"); fire α1; trace(v,"z");}
β1 {trace(v+10,"b"); fire α2; trace(v,"x");}
b1
b
a2
α2 {trace(v+10,"c"); fire β2; trace(v,"y");}
α1[v>0] {trace(v+10,"a"); fire β1; trace(v,"w");}
a1
γ(p) {v=p};
![Page 34: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/34.jpg)
Figure 23. Inexact state scoping - [model t5250]
© Graham G. Thomason 2003-2004 31
y
sy
zz2z1
ζ1
ζ2
Available for parallel activity
d
u
t
d1 d2 d3
s
r
q
p
δ->y->$$d.d1.q/\d2/\$$d.d3.u(inexact orbit and inexact state in multiple target specification)
n=n*10+3x=x*10+3
n=n*10+5x=x*10+5
n=n*10+2x=x*10+2
n=n*10+1x=x*10+1
n=n*10+1x=x*10+1
n=n*10+4x=x*10+4
statechart sc
a2
α->a(inexact specification, which is acceptable, the exact specification being α->$a)
a1
a
b
bNote: same name as parentb1 b2
β2->$b ok β1->b
Note: β1 does not give rise to fork nondeterminism
β1->b masked - not addressable this way
e
ε8{deep_clear(sy);}
Hε1
ε9 {clear(y);}
(inexact specifications)
ε2
![Page 35: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/35.jpg)
5.2 Small Nondeterministic Models
Figure 24. Set transit nondeterminism only [model t5410]
32 © Graham G. Thomason 2003-2004
c
i j
j2
j1
i2
i1v=v*10+4 v=v*10+5
v=v*10+1a
statechart sc
b
p q
q2
q1
p2
p1u=u*10+4 u=u*10+5
u=u*10+2 u=u*10+3
u=u*10+1
v=v*10+2 v=v*10+3
β
β
α
γ
ψ {u=0; v=0;}
u=u*10+4 u=u*10+5
v=v*10+5v=v*10+4
![Page 36: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/36.jpg)
Figure 25. Set Action Nondeterminism [model t5412]
When, say, events α_j, α_n, and α_s are given, then ω is given, the actions that take place are treated in the same way as set-transit actions on member states.
Notes α, α gives rise to race nondeterminism on a 5 way race, giving Permrace(5) worlds, i.e.
10 worlds under the med_set_tran option. (See Figure 41 and the description following for more explanation about this). This option produces 2n of the n! permutations. This is still quite fast.
α, ω gives rise to set-action nondeterminism, causing permutations on (exit-j and exit-l and exit-n) and on (exit-q and exit-s), and between them, as if set-transit nondeterminism were involved, giving Permset-tran(2).Permset-tran(3).Permset-tran(2) =24 worlds. This is slow.
α, ω_race gives rise to mixed race and set-action nondeterminism, giving Permset-
tran(2).Permset-tran(3).Permset-race(2) =24 worlds. The speed is medium.
Note on speed By medium, we mean, typically, a matter of minutes on a 300 MHz machine By slow, we mean, typically, a matter of 30 mins-2 hours on a 300 MHz machine Speeds vary according to
- the Prolog System- whether we run the model under the GP4 test harness or stand-alone- what has been run before (under the top-level Prolog prompt), since memory
fragmentation (presumably) can degrade performance by one or more orders of magnitude.
© Graham G. Thomason 2003-2004 33
sy
i
j l
k
a
n
mα,α_j
α,α_i
α,α_l
α,α_k
α,α_n
α,α_ma1 a2 a3
p
q s
r
b
u
tα,α_q
α,α_p
α,α_s
α,α_r
α,α_u
α,α_tb1 b2 b3
ω
ω_race, ω1
ω_race, ω2
v=v*10+1
v=v*10+3
v=v*10+2
v=v*10+4
v=v*10+6
v=v*10+5
commented out for performance reasons
![Page 37: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/37.jpg)
Figure 26. Set meta-event nondeterminism [model t5414]
Illustrative sequence: α_j α_n α_s ω_x, showing permutations of exit meta-events.
Analogous comments regarding race nondeterminism versus set-meta-event nondeterminism apply to those of model t5412, under med_set_tran permutations:- α,α a 4-way race, Permrace(4)=8 worlds, fast.- α,ω_x set-meta-event nondeterminism, Permset-tran(1).Permset-tran(3).Permset-tran(2) =12
worlds, slow.- α,ω_race rise to mixed race and set-meta-event nondeterminism, giving Perm set-
tran(1).Permset-tran(3).Permset-race(2) =12 worlds, medium speed.
34 © Graham G. Thomason 2003-2004
sy ω
ω_race, ω1
i
j l
k
a
n
mα,α_j
α,α_i
α,α_l
α,α_k
α,α_n
α,α_ma1 a c3
p
q s
r
b
u
tα,α_q
α,α_p
α,α_s
α,α_r
α,α_u
α,α_tb1 b2 b3
ω_race, ω2
ω_xx
z
exl
exn
exj
exs
exu
exq
neutral
ω_neutral
exit(x.a.a1.j) {v=v*10+1;}
exit(x.a.a1.l) {v=v*10+2;}
exit(x.a.a1.n) {v=v*10+3;}
exit(x.b.b1.q) {v=v*10+4;}
exit(x.b.b1.s) {v=v*10+5;}
exit(x.b.b1.u{v=v*10+6;})
commented out for performance reasons
![Page 38: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/38.jpg)
Figure 27. Fork nondeterminism only [model t5420]
Figure 28. Fork Nondeterminism differentiated by history [model t5422]
To effectuate the nondeterminism, execute events as follows event γ brings the machine to state p2 event γ brings the machine back to a1, with history of cluster p recorded event α forks on existence of the record of history event β of worlds causes reconvergence of worlds by clearing all record of history of
cluster p
© Graham G. Thomason 2003-2004 35
m α {v=0;}
a
d2
d3
δ {v=v*10+2}
v=v*10+1
statechart sc
d4v=v*10+4
δ
δ
δ {v=v*10+2}
δ {v=v*10+3}
δ {v=v*10+3}
b1
b2
β
β
c1
c2
c3
γ
γ
γ
γ
a
a1
statechart sc
p1 p2p H
γ γ
α{clear(p);}
α
β{clear(p);}
![Page 39: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/39.jpg)
Figure 29. Race nondeterminism only; winner detected by meta-event [model t5430]
Figure 30. Race nondeterminism only - winner detected by fired event [model t5440]
36 © Graham G. Thomason 2003-2004
a
s
z
α a1 a2
enter($a.a2)z1 z2
z3enter($b.b2)
bb1 b2
α
β
β
β
note that β resets as a 3-way race, but with same result in each case
statechart sc
a
s
z
α {fire γ}a1 a2
γz1 z2
z3
δ
bb1 b2
α {fire δ}
β
β
β
note that β resets as a 3-way race, but with same result in each case
statechart sc
![Page 40: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/40.jpg)
Figure 31. Race nondeterminism only - winner detected by variable value [model t5450]
Figure 32. Race nondeterminism - winner detected by history [model t5460]
For a simpler illustration of history in nondeterminism, as a case of fork nondeterminism, see model t5422.
To run the race, process events gamma, gamma, alpha. In one arm of the race, the history of cluster p is cleared, in the other it is not cleared (because b1 is vacant and the conditional action to clear history does not take place).
Alternatively, events gamma, alpha are processed. A similar race takes place. In this case history is set on one of the transitions involved in the race, (as opposed to the previous case where history was set up before the race).
© Graham G. Thomason 2003-2004 37
a
s
α {v=v*10+1;}a1 a2
bb1 b2
α {v=v*10+2;}
β {v=0;}
β
statechart sc
a
s
α if (in($b.b1)) {clear (p);}a1 a2
bb1 b2
α
β
β
statechart sc
p1 p2p H
α if (in($b.b1)) {clear(p);}
γ γ δ{clear(p);}
![Page 41: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/41.jpg)
Figure 33. Race nondeterminism - winner detected by trace [model t5470]
Figure 34. Race to a single target [model t5472]
Figure 35. Race to start (mutually exclusive transitions) [model t5474]
38 © Graham G. Thomason 2003-2004
statechart sc
s
a1
cα {trace(1);}
a2
sys
a β
δ {trace_clear();)
b1 b2b γ
α {trace(2);}
a
s
α[in($b.b1)]a1 a2
bb1 b2
α [in($a.a1)]
β
β
statechart sc
a
s
α {trace("ab");}a1 a2
bb1 b2
α {trace("cd");}
β{trace(25);}
β{trace(36);}
statechart sc
γ{trace_clear();}
![Page 42: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/42.jpg)
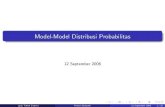
Figure 36. Compact multiple nondeterminism (4 kinds) [model t5480]
This model can be used with event β to illustrate set-transit, fork, and race-condition nondeterminism, or with event α to illustrate broadcast-event nondeterminism.
© Graham G. Thomason 2003-2004 39
a
β
b1
s
c
z
βc1 c2
α->a2 {fire β}a1 a2
b
c3β
b2p q
q2
q1
p2
p1
enter($b.b2.p.p1)z1 z2
z3enter($c.c3)
v=v*10+7
v=v*10+6
v=v*10+4 v=v*10+5
v=v*10+2 v=v*10+3
v=v*10+1
statechart sc
γ
γ γ
γ
ω{v=0;}
![Page 43: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/43.jpg)
Figure 37. Illustration of all kinds of STATECRUNCHER output [model t5490]
Notes This model is basically a race on event α between fired events γ and δ, with the winner
established by the order of processing fired events γ and δ in member z and by trace data deposited in members a and b.
Scoped events ζ and $ζ Scoped variables v and $v Scoped PCOs pco1 and $pco1 Note how a nondefault cluster member (q) can be entered using event ε the first time and
event α from state a1 using history the second time. Note that internally generated events, in our example, exit(::a.a2.p) are not
offered as user suppliable.
This model is used an example to illustrate output that would be used in communication with a primer. (A primer is a program that decides what tests to perform, i.e. what events to process, whereas STATECRUNCHER gives the oracle to these tests).
40 © Graham G. Thomason 2003-2004
statechart sc
a2
s
z
α {fire γ; trace(5,7);}
a1p
γ
z1
z2
z3δ
b
b1
b2
α {fire δ; trace("xy");}
ε
β
β
a Hq
ζ(p1,p2,p3,p4,p5){v=p1; $v=p2; col1=p3; bool1=p4; str=p5;}
$ζ[w>3]{str=str+"a";}
β
θ1@pco1{w++;}
θ2@$pco1{w--;}
exit(::s.a.a2.p){w++;}
v=0, w=0, col1=blue, bool1=true, str1="a"
α β γ δ ε ζ pco1
v=0,p1,p2,p3,p4,p5
pco1
ζ
global PCO
local ζ; global & local v
local PCO
global ζ
θ1 θ1
![Page 44: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/44.jpg)
Figure 38. Transition Prioritization [model t5500]
© Graham G. Thomason 2003-2004 41
a
aaaaq
ap
a2aa
s
α7[v7] {v=1;}
α8[v8] {v=1;}
α9[v9] {v=1;}
z
τ sets all vnn variables trueτnn sets specific variable trueφ sets all vnn variables falseφnn sets specific variable false
statechart sc
a8
a4α4[v4] {v=1;}
α5[v5] {v=1;}
α6[v6] {v=1;}
α1[v1] {v=1;}
α2[v2] {v=1;}
α3[v3] {v=1;}
γ
a1
a3
a5
a9
a7
a6
b
bbbbq
bp
b11bb
α16[v16] {v=2;}
α17[v17] {v=2;}
α18[v18] {v=2;}
b17
b13α13[v13] {v=2;}
α14[v14] {v=2;}
α15[v15] {v=2;}
α10[v10] {v=2;}
α11[v11] {v=2;}
α12[v12] {v=2;}
δ
b10
b12
b14
b18
b16
b15
ω3 {v=0;}
etc.
ω2ω1 {v=0;}
v v1 v2 v3 etc.
Note: There is only one event α. The superscripts provide a way to identify transitions on α.
(many separate transitions)
![Page 45: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/45.jpg)
Figure 39. Scoped events illustrated by fork nondeterminism [model t5510]
42 © Graham G. Thomason 2003-2004
statechart scx
b
p
r
s
t
e
a
β ::α
c
d
α
α
α
α
no α here
u
v
::x.α
::x.a.b.α
::x.a.α
::x.a.b.c.α
::x.a.b.c.d.α
references ::x.a.α
no α here
references ::x.a.α
references ::x.a.α
fork-2
q
$α
fork-1
same as above by alternative notation
![Page 46: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/46.jpg)
Figure 40. Limited permutation race nondeterminism [model t5520]
Explanation of the permutation limitations no_race: Only one permutation will be generated. The transition in the first set
member will be executed first, then the one in the second set member etc. The permutation using set member names is abcd.
low_race: Only two permutations will be generated. One is as above, and the other is the reverse of that order. The permutations are abcd and dcba.
med_race: The number of permutations generated is 2n. These permutations are all the cyclic and anticyclic rotation operations on the no-race permutation. The permutations are (cyclic) abcd, bcda, cdab, dabc, (and anticyclic) dcba, cbad, badc, adcb.
high_race: All n! permutations are generated, i.e. 4! = 24 permutations in this case.
These options can be set at a PROLOG prompt by the predicates me_no_race, me_low_race, me_med_race and me_high_race. The default is me_med_race.
© Graham G. Thomason 2003-2004 43
statechart sc
a
αb1
s
c
d
αa1
b
ω1
b2v=v*10+2
a2v=v*10+1
αc1 c2
v=v*10+3
αd1 d2
v=v*10+4
ω_no_race{no_race();}ω_low_race{low_race();}
ω_high_race{high_race();}ω_med_race{med_race();}
ω_v_reset{v=0;}
![Page 47: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/47.jpg)
Figure 41. Limited permutation set-transit nondeterminism [model t5530]
Explanation of the permutation limitations no_set_tran: Only one permutation will be generated. The transition in the first
set member will be executed first, then the one in the second set member etc. The permutation using set member names is pqrs.
low_set_tran: Only two permutations will be generated. One is as above, and the other is the reverse of that order. The permutations are pqrs and srqp.
med_set_tran: The number of permutations generated is 2n. These permutations are all the cyclic and anticyclic rotation operations on the no-set_tran permutation. The permutations are (cyclic) pqrs, qrsp, rspq, spqr, (and anticyclic) srqp, rqps, qpsr, psrq.
high_set_tran: All n! permutations are generated, i.e. 4! = 24 permutations in this case.
These options can be set at a PROLOG prompt by the predicates me_no_set_tran, me_low_set_tran, me_med_set_tran and me_high_set_tran. The default is me_med_set_tran.
44 © Graham G. Thomason 2003-2004
β
a
sy
statechart sc ω1
b
p qq2
q1
p2
p1x=x+"c" x=x+"e"
x=x+"b" x=x+"d"
x=x+"a"
ρ
ρ ρ
ρ r2
r1x=x+"g"
x=x+"f"
ρ
ρs2
s1x=x+"i"
x=x+"h"
ρ
ρsr
c
p qq2
q1
p2
p1x=x+"3" x=x+"5"
x=x+"2" x=x+"4"
x=x+"1"
ρ
ρ ρ
ρ r2
r1x=x+"7"
x=x+"6"
ρ
ρs2
s1x=x+"9"
x=x+"8"
ρ
ρsr
εζ
α
γδ
ω_no_set_tran{no_set_tran();}
ω_low_set_tran{low_set_tran();}
ω_high_set_tran{high_set_tran();}
ω_med_set_tran{med_set_tran();}
ω_vreset{x="";}
![Page 48: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/48.jpg)
Figure 42. Different transitionable events after nondeterminism [model t5540]
© Graham G. Thomason 2003-2004 45
statechart sc
m
a1
α {p1=0; p2=0;
p3=0;}
p1=0, p2=0, p3=0
β
b3
b1
b2
c4
c2
c3
γ($p1)
γ($p1,$p2,$p3)
δ
β
β
c1
γ($p1,$p2)
![Page 49: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/49.jpg)
Pruning of traces - fork - non-self transitions [model t5550]
Figure 43. Pruning of traces - fork - self transitions [model t5555]
46 © Graham G. Thomason 2003-2004
aα {trace("ab"); trace("cd");}
p
q
statechart scρ {trace_clear}
α {trace("ab");}
r
ρ1 {trace_clear; trace("pq");}
s
t
α {trace("ab"); trace("cd");} trace("ef");}}
α {trace("ab"); trace("yz");}
uα {trace("yz");}
statechart sc
p
ρ {trace_clear}ρ1 {trace_clear; trace("pq");}
a α {trace("ab"); trace("cd");}
α {trace("ab");}
α {trace("ab"); trace("cd");} trace("ef");}}
α {trace("ab"); trace("yz");}
α {trace("yz");}
![Page 50: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/50.jpg)
Pruning of traces - race - non-self transitions [model t5560]
Figure 44. Pruning of traces - race - self transitions[model t5565]
© Graham G. Thomason 2003-2004 47
a
s
α {trace("ab");fire α1;}
p q
b
β {trace(1);fire β1}
statechart sc
c
r
d
ρ {trace_clear}ρ1 {trace_clear; trace("pq");}
α1 {trace("cd");}
β1{trace(2);}
α {trace("ab");fire α2;}
β {trace(1);fire β2}
α3 {trace("cd");trace("ef");}
β2{trace(4);}
α {trace("ab");fire α3;}
β {trace(1);fire β3}β3{trace(6);}
α2 {trace("yz");}
α {trace("ab");fire α1;}
β{trace(1);}
p q r
p q r
p q
s
α {trace("ab");fire α1;}
a
statechart scρ {trace_clear}
α1 {trace("cd");}
α {trace("ab");fire α2;}
bα2 {trace("yz");}
α {trace("ab");fire α3;}
cα3 {trace("cd"); trace("ef"); }
α {trace("ab");}
d
ρ1 {trace_clear; trace("pq");}
![Page 51: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/51.jpg)
Figure 45. Arrays with fork nondeterminism [model t5580]
As at Release 1.04 Array base (i.e. without index), and all array elements must be declared Undeclared array elements may work as regards internal logic, but will not be shown in
output, nor be accepted as command input (as from primer).
Test sequence events δ,β,γ,α. Event δ increments local k1, and so some indices, marked by a +.
48 © Graham G. Thomason 2003-2004
m
a1
α/all variables to initial values
iv=0, k1=3, k2=5
β/ia[4]=5;
β/::ia[::k1+k1]=-1;
β/ia[k1+k2]=8+1;
β/ia[k1+2][k1-1]=7;
scoping =[4+]
LVALUE TESTING RVALUE TESTING
2 dimensions =[5+][2+]
β/ia[k1+4][2][4]=12;3 dimensions =[7+][2][4]
expression index =[8+]
constant index [4] γ[ia[4]==(k1+2)]/iv=ia[4]+1;
γ/::iv=::ia[::k1+k1]+1;
γ/iv=ia[k1+k2]+1;
γ/iv=ia[k1+2][k1-1]+1;
γ/iv=ia[k1+4][2][4]+1;
iv=0, k1=1, ia[4]=0, ia[5]=0
β/sa[k1+1]="abc";string =[4+] γ/sv=sa[k1+1]+"X";
b4
b1
b2
b3
b5
b6
b7
β/ba[k1+1]=1;boolean =[4+] γ/bv=!ba[k1+1];
δ/k1++
ia[4]=0, ia[8]=0, ia[5][2]=0; ia[7,2,4]=0
ia[5]=0, ia[9]=0, ia[6][3]=0; ia[8,2,4]=0
ba[4]=0
ba[5]=0
sa[4]="x",
sa[5]="x",
bv=0 sv="x",
c4
c1
c2
c3
c5
c6
c7
note the two scopes of ia[4], ia[5]
conditional transitionfork
nondeterminism
![Page 52: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/52.jpg)
Figure 46. Simple scoped array [model t5581]
© Graham G. Thomason 2003-2004 49
γ/::a[3]=200
a1
α/a[3]=20
β/v=a[3]
δ/v=::a[3]
ω/::a[3]=100;a[3]=10;v=0;
a[3]=10, v=0m
a[3]=100
![Page 53: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/53.jpg)
Figure 47. get_nworlds: Get number of worlds (1) [model t5600]
Parameter P1 to get_nworlds: P1=1 (default) for command-time number-of-worldsIllustrative event sequence: φ,β,α
Figure 48. get_nworlds: Get number of worlds (2) [model t5602]
Parameter P1 to get_nworlds P1=2 for execution-time number-of-worldsThis number may be higher than expected due to internal world generation on any action.Illustrative event sequence: β,α
50 © Graham G. Thomason 2003-2004
m
a1
α {nw=0;v=0}
nw=0,v=0
β /nw=get_nworlds();if (nw<=1)fire γ1;
b3
b1
b2
c3
c2
γ1
γ2
c1
γ3
β /nw=get_nworlds(1);if (nw<=2)fire γ2;
β /nw=get_nworlds(1);if (nw<=3)fire γ3;
φ/v+=1;
φ
a fork
m
a1
α {nw=0;v=0}
nw=0,v=0
β /nw=get_nworlds(2);if (nw<=6)fire γ1;
b3
b1
b2
c3
c2
γ1
γ2
c1
γ3
β /nw=get_nworlds(2);if (nw<=6)fire γ2;
β /nw=get_nworlds(2);if (nw<=6)fire γ3;
φ/v+=1;
φ
a fork
![Page 54: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/54.jpg)
6. Systematic Test Models
Diagrams with their model numbers follow.
© Graham G. Thomason 2003-2004 51
![Page 55: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/55.jpg)
6.1 State Hierarchy and Initial Machine Entry
Figure 49. Hierarchy for initial/directed state entry [model t6200 & derivatives]
Note: Model t6200 contains all the above (8 sets in full exit from initial state). Other models contain just part of the full model as indicated, e.g. t6201 contains just outer set ab from this model. (5 sets in all).
52 © Graham G. Thomason 2003-2004
statechart sc a(set)
aaa(set)
aa(cluster)
aaab(cluster)
aaabbaaaba
aac(cluster)
aacaa aacab
ac
aacba aacbb
aaca(cluster)
aacb(cluster)
aacc(set)
aad
aaccaaaccb
aaaabaaaaaa aaaaab
aaaaa(cluster)
aaaa(cluster)
aaac(set)
aaaca aaacc
ab(set)
abbb
abb(cluster)
abd
abab
aba(set)
abcb
abca
abc(set)
abaa(set)
abaaa
a
abaab
abba(set)
abbaa abbab
aaaaac
aaabc
aaacbaaccc
aacac
aacbc
t6201
t6202
t6203
t6205
t6200
t6204
t6206
aab(set)
aaba(cluster)
aabaaaabab
aabc
aabac
aabbb
aabba
aabb(set)
![Page 56: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/56.jpg)
Figure 50. t6200 structure
Counting any non-first member as a second member, the above hierarchy contains routes from the top
Set to set/cluster/leafstate S1-S1 S1-S2 S2-S1 S2-S2 S1-C1 S1-C2 S2-C1 S2-C2 S1-L1 S1-L2 S2-L1 S2-L2
Cluster to set/cluster/leafstate C1-C1 C1-C2 C2-S1 C2-S2 C1-C1 C1-C2 C2-C1 C2-C2 C1-L1 C1-L2 C2-L1 C2-L2
© Graham G. Thomason 2003-2004 53
statechart
C1
S
L
C2 S1
C1
a
aa ac
initial state =occupiedinitial state = vacant
S2C2C1
aaaL aad
S2 aab
C1
S2
S1
ab
C1
C2 S2
C2
S1 L S1 L
L aba abb
S2
LL
abc abd aac
XX
Legend S = Set 1 = First member C = Cluster 2 = Subsequent member L = Leafstate
S2
LLL
LLL
LLLL LLL LL L LLLLLL LLL LL LL
![Page 57: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/57.jpg)
Occupied/Vacant combinations Setocc-Cluster Setvac-Cluster Setocc-Set Setvac-Set Clusterocc-Cluster Clustervac-Cluster Clusterocc-Set Clustervac-Set
The following sequences are also covered Set Cluster Set Cluster Set Cluster
These are the primary aspects being tested, in respect of “entering initial state”.
54 © Graham G. Thomason 2003-2004
![Page 58: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/58.jpg)
6.2 Specifying States in TransitionsFigure 51. Specifying States (model t6220)
© Graham G. Thomason 2003-2004 55
statechart sc
Notes: The notation shown does not include all delimitation (e.g. semicolons)Exclamation marks on names are attention-drawing, not syntacticalTransitions are shown with explicit target state expressionsDefault states are not shown in this diagramx
za zb
to-cousin transitionto-nephew transitionto-uncle transition
complex expression to denote destination
self transition of sonself transition of parent
z ζ1->zb
ζ2->za
scoped eventNote: more local κ1 found by outbound search; $$ needed to reference the outer κ1
k
ka kb
κ1->kb
$$κ1->ka
Notes:Transitions between set members are potentially illegal, but
they could be legalized by introducing an “orbit”. ma, mb are clusters, denoted in alternative notations
m
maa mab mba
mbbmbb
ma mbμ2->$mb
μ5->$mb.mbb
μ6->$ma.mab
μ3->mab
mc
mcambb
μ8->$mc
y
d
da b!
e
e! eb
b
ba d!
g
ga gb
f
fa fb
to-child transitionto-sibling transitionb->d disambiguation
to-uncle transitionto-sibling transitionda->b disambiguation
external self-transitionsto-parent transitionto-child transitione->e disambiguation
a
aaab
internal self transitionsto-child transitionto-sibling transitionto-parent transition
i
ia ib
1->a.aa
2->ab3->$a
1->b.d
2->d
δ1->$b δ2->b
ε1->e
ε4->e.e
ε2->$eε3->e
φ1->g.ga
φ2->$g.ga
φ3->$g
γ1->g
γ2->gaι1->y%%i.ib
ι2->::x.y.i.ia
5
4
κ1,κ2
κ1,κ2
μ7->$m
μ1->$$m
ε5->eb
ω_a->y.a
ω_b->y.b
ω_d->y.d
etc. for many states
μ4->$ma
![Page 59: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/59.jpg)
Figure 52. Specifying States - continued
56 © Graham G. Thomason 2003-2004
x
y
s
sa sb
t
ta tb
r
ra rb
τ1->tb {clear($r)}
τ2->ta{deep_clear($r)}
enter($$z.za)->sb
exit($$z.za)->sa
z
p
pa pb
statechart sc
parameterized eventconditional transitionconditional action
π1[v==2]
π1->pb{if(!in(S1)){A1}
else {A2} }
orbital route meta-events actions refer to states
ρ->$$y->rb
as on previous sheet
the ν1 target expression inscope [n,y,s,st] evaluates to[[p2,p,n21,n2,n,y,s,st], [q1,q,n21,n2,n,y,s,st], [r,n22,n2,n,y,s,st], [u,n23,n2,n,y,s,st]]
n
n2
p1
p2
n22 n23
n1n21
qp
q1
q2
r
s
t
u
ν2->n2.( n23.r /\ n22.u /\ (n21.(q.q1/\p.p2)) )
H
ν82->sν81->q2
π2(::v)->p
ν1->n2.( (n21.(p.p2/\q.q1)) /\ n22.r /\ n23.u )
ν2 as ν1, (details above) but specified in reverse order
the ν2 target expression inscope [n,y,s,st] evaluates to[[u,n23,n2,n,y,s,st], [r,n22,n2,n,y,s,st], [q1,q,n21,n2,n,y,s,st], [p2,p,n21,n2,n,y,s,st]]
S1=::x.z.zaA1=v=1;A2=v=3;
sets v
fuller orbital functionality demonstrated elsewhere
![Page 60: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/60.jpg)
6.3 Deep Nesting
6.3.1 Deep Cluster nesting [model t6222]
Figure 53. Deep Cluster Nesting
Notes on event notation (showing destination relation) follow.
© Graham G. Thomason 2003-2004 57
s
za zb
statechart sc
z ζ1
ζ2
yα3
bbabbb
baabab
abaabb
aaaaab
a
baab
baa
bb
α3κ2
κ2υ2
ν2gυ1
gν1
dυ1
dν1
dκ1
π1
α1
τ1
gπ1
gτ1
α1
α1
α1
α1
α1
α1
α1
α2
α2
τ2 π2 gτ2
ν1
υ1
κ1
gπ2
dκ1
κ1
σ4
σ3
σ2
σ1
![Page 61: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/61.jpg)
Figure 54. Terminology for relationships (with event naming convention)
Figure 55. Nonleaf-Nonleaf relationships
Table 4. Matrix of event names
one removed two removedto from
leaf lp lgp lggp leaf lp lgp lggp leaf lp lgp lggp
leaf α1 π1 gπ1 ggπ κ1 υ1 gυ1 dκ1 dυ1sibling parent gr-par gr-gr-p cousin uncle gr-un 2cousin 2uncle
lp τ1 α2 π2 gπ1 ν1 κ2 υ2 gυ2 dν1 dκ2 dυ2child sibling parent gr-par nephew cousin uncle gr-un 2neph 2cousin 2uncle
lgp gτ1 τ2 α3 π3 gν1 ν2 κ3 υ3 dν2 dκ3 dυ3gr-ch child sibling parent gr-neph nephew cousin uncle 2neph 2cousin 2uncle
lggp ggτ gτ2 τ3 α4 gν2 ν3 κ4 dν3 dκ4
58 © Graham G. Thomason 2003-2004
aa ba
parent π1child τ1
great uncle gυ1great nephew gν1
aaa aab baa
second uncle dυ1second nephew dν1
second cousin δκ1cousin κ1
uncle υ1nephew ν1
sibling α1
a b
ab
abb
grandparent gπ1grandchild gτ1
aa ba
parent π2child τ2
aaa aab baa
uncle υ2nephew ν2
a b
ab
abb
sibling α2 cousin κ2
![Page 62: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/62.jpg)
gr-gr-c gr-ch child sibling gr-neph nephew cousin 2neph 2cousin
Legend: lp=leaf-parent; lgp=leaf-grand-parent; lggp=leaf-great-grand-parent; shaded=not tested
Predicate gn_relname(FROM,TO,RELATION) will produce relation names, given machine paths to be read from right to left, e.g.
gn_relname( [u1,u2,u3,u4,u5,u6,u7,u8,u9,c], [p1,p2,p3,p4,p5, c],R).
R=[5,[great,great,great,uncle]]).
i.e. TO is a fifth great,great,great,uncle of FROM.
© Graham G. Thomason 2003-2004 59
![Page 63: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/63.jpg)
6.3.2 Deep set nesting (model t6224)
Figure 56. Deep set nesting
60 © Graham G. Thomason 2003-2004
p
statechart sc
za zbz ζ1
ζ2
s
bbb
aba
abb
aaaaab
a
baa
ab
b
κ2
ν21
υ21
dκ1
dκ1
π1
α11
τ1
gπ1 gτ1
α11
α12
α12
α22
α21
τ2 π2
gτ3 gπ3
y
aaba
q
α13α13
σ2
σ4
σ3
σ1
bb
bba
babκ1
κ1
ν1
υ1
ggτ1 ggπ1
dυ11
dν11
κ2
α31
gυ1
gν1
υ22 ν22
dυ12
α14α14
α31
![Page 64: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/64.jpg)
With sets, any direct transition crossing a set member separator ( ) is in principle illegal. Such an apparent transition can be re-interpreted as legal transition by introducing an orbit:
Orbital transitions provide a legal way of transitioning to a set member, as long as any exited set is re-entered.
The elements of a set are normally sets or clusters, so we chiefly use clusters as the innermost set members, with one leaf-state set member for completeness.
The above figure allows for exercising of non-orbital direct-ancestor/direct descendant transitions.
© Graham G. Thomason 2003-2004 61
![Page 65: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/65.jpg)
6.4 Transition SelectionFigure 57. Simple Enter-Exit Transition Selection [model t6230]
Note: This model is not suitable for user-level driving and is used at an API level.
62 © Graham G. Thomason 2003-2004
b
s
bb
statechart sc
ca cb
c
da db
d
exit($s)[B15]
enter($b.bb)[B14]
exit($s)[B13]
ALPHA,enter($b.bb.bb)[B12]
bb
B12 B13 B14 B15 (boolean variables)
![Page 66: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/66.jpg)
Figure 58. Transition Selection Basics - [model t6240]
Notes: This model is a ‘legacy’ model, used in some low-level tests, but is not particularly suitable as a transition demonstration model due to the diversity of features. There ere two events α, with superscripts added as a means of identifying transitions on them.
© Graham G. Thomason 2003-2004 63
a1
a4
a5a
a5b
b2
ω_a5b
a2
a3
b
s
ba bbα10[B10]
α11[B11]
α0(P1,P2)[B0&&P2]
α2(P1)[B2&&P1]
α3[B3]
$$α6/*[B6]*/
β,α5[B5]
α7[B7]
α4[B4]
α8[B8]
α9[B9]
zτ,φ various self transitions used for control of (condition) variables
ω_ba
ca cbω_ca
ω_a5a
c α12,enter($b.bb.bb)[B12]
exit(s)[B13]
bb NB identical unscoped name bb
NB: exit(s) actually gives a useless transition but it illustrates the outbound search mechanism in transition selection.
bb
da dbω_da
d enter($b.bb)[B14]
exit($s)[B15]
NB note which α
NB: exit($s) refers to same state as exit(s) above
statechart sc
α1
(t1,$t2)[B1]
bc
bcdb
bcda
bca bcc bcdbccb
bcca
bcab
bcaa
bcbbcbb
bcba
P1,P2
NB B6 commented out
α (transitions α0 α1 α2 α6 α10 α11 α12)
α (transitions α3 α4 α5 α7 α8 α9)
B1 B2 etc.
![Page 67: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/67.jpg)
6.5 OrbitsFigure 59. Orbits [model t6260]
Notes: Variables x and n are reset by ω transitions (specific set-to-state transitions), not shown in
the diagram. If an orbital transition arc cuts through n member-state boundaries, the orbital state can be
addressed using n+1 $-signs.
64 © Graham G. Thomason 2003-2004
statechart sc n=0 x=0
s
y
aa
aaa aab
α1->aab
α2->$$a->aab
ab
b
α3->$$$y->aab
α5->::$sc->aab orbit=[sc]
a
β1->$$y->$a
β2->$y->a.aa
β3->$a
γ4->$$y->aa.aab
n=n*10+3 x=x*10+3
n=n*10+2 x=x*10+2
za zbz ζ1
ζ2
γ3->$$$y->$ab
β4->a.aa
γ2->aa.aab
γ1->$abδ4->$$a->aaa
ε1->a->a.aa.aaa
n=n*10+4 x=x*10+4
n=n*10+5x=x*10+5 α4->::s->aab
orbit=[s,sc]
applies to cluster y
ζ9->::$sc->$z.zb
n=n*10+1x=x*10+1
n=n*10+1x=x*10+1
δ2->aaa δ1
δ3->$aa->aaa
![Page 68: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/68.jpg)
Figure 60. Orbits - Legalisation of doubtful orbits [model t6264]
© Graham G. Thomason 2003-2004 65
statechart sc
sy
a
j
b2c1
b1
i
pq2
r1
q1
g
f
γ2r2
c2
k
l
t
s
occupied state
historical state
D
γ1
γ3
γ4
γ5
γ6
δ1
x=x*10+2
x=x*10+9
n=n*10+9
n=n*10+2
n=n*10+3
n=n*10+4
x=x*10+3
x=x*10+4
α1
z1
z available for variable control
γ7
δ2
zn=zn*10+1zx=zx*10+1 zn=zn*10+2
zx=zx*10+2
y
x=x*10+6n=n*10+6
effective transition in most cases
α2 x=x*10+5n=n*10+5applies to cluster y
β4
β5
β1
β6
β3
β2
x=x*10+8
x=x*10+8
n=n*10+8
n=n*10+8
x=x*10+8
n=n*10+8
n=n*10+1x=x*10+1
![Page 69: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/69.jpg)
6.6 Common Tree RemovalFigure 61. Common tree removal in sets [model t6270]
Used without transitions, generating explicit enter/exit trees, in demonstration programs.
66 © Graham G. Thomason 2003-2004
sa
i
p
j
y
f
b
q
gx
r
statechart sc
c
k
b1 b2
![Page 70: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/70.jpg)
6.7 Scope of Enter/Exit TreesFigure 62. Scope of enter/exit trees [model t6280]
The algorithm tested here is described in [StCrMain] in the section on the transition course.
This model is used for low-level API testing and is not suitable as a high-level demonstration, since the exit and entry tree scopes are not visible at a high level.
This model is also exhibited in the main STATECRUNCHER report [StCrMain], in the section on the transition algorithm, showing the scopes involved.
© Graham G. Thomason 2003-2004 67
statechart sc
x
a
α3->$$a.b.c
α1->::x->::x.y.a.b.c orbit=[x,sc]
y
f
bc
d
pq
rs
γ3->c
β3->a.b.c
δ3->$$c
tα1
tγ3
tβ3
tδ3
tα3
α2->::x.y.a->::x.y.a.b.c orbit=[y,x,sc]
tα2
e
β2->a->a.b.c orbit=[a,y,x,sc]
tβ2
tγ1γ1->$b->c orbit=[b,a,y,x,sc]
γ2->c->c orbit=[c,b,a,y,x,sc]tγ2
tδ2
tδ1 δ1->$$$b->$$c orbit=[b,a,y,x,sc]
δ2->$$c->$$c orbit=[c,b,a,y,x,sc]
β1->$y->a.b.c orbit=[y,x,sc]tβ1
t
![Page 71: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/71.jpg)
6.8 Transition CourseFigure 63. Entry tree logic for clusters (1) - [model t6291]
Notes The algorithm tested here is described in [StCrMain] in the section on the transition
course. The terminology is taken from there (case numbers, guided/unguided entry, dho=deep history obligation).
Notation such as 12eff, with a dotted transition arc, refers to the effective transition of the one on event 12.
upon enter and upon exit assignments are made throughout the model:vn= upon enter assignment on entry into state above the symbolvx= upon exit assignment on exit of state abovethe symbol
vn=vn*10+1 at leaf level; vn=vn*10+2 at parent; vn=vn*10+3 at grandparent vx=vx*10+1 at leaf level; vx=vx*10+2 at parent; vx=vx*10+3 at grandparent
This model is used at API level as well as high level, and should not be changed lightly
68 © Graham G. Thomason 2003-2004
statechart sc
sy
main
cases 1,2: at a, choosing pcase1: 1: Guided, (D), target=occ, no orbit case1: 2: Guided, (D), target=occ, super-orbital case2: 3: Guided, (D), target=occ, at-orbitalcase2: 4: Guided, (D), target=occ, sub-orbital
z ζ available for various control functions
p2
p1
q2
q1
aD
historical state
1
p q
occupiedstate
2
3
9
1eff
9eff
11eff
3eff, 13eff ω_a_q2
vn=vn*10+1vx=vx*10+1
vn=vn*10+1vx=vx*10+1
vn=vn*10+1vx=vx*10+1
vn=vn*10+1vx=vx*10+1
vn=vn*10+2vx=vx*10+2
vn=vn*10+2vx=vx*10+2
vn=vn*10+4vx=vx*10+4
ω_vreset{vx=0;vn=0;}
ω_a_p2
ω_hreset{deep_clear(main);}
2eff,12eff
11 12 13
![Page 72: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/72.jpg)
Figure 64. Entry tree logic for clusters (2) -[model t6292]
© Graham G. Thomason 2003-2004 69
statechart scsy
main
case 3: at xq, choosing qβ1: Guided, (D), target=vac, no orbit β2: Guided, (D), target=vac, super-orbital β3: Guided, (D), target=vac, at-orbitalβ4: Guided, (D), target=vac, sub-orbital
z ζ available for various control functions
p2q2
q1
b
historical state
β3
pxq
occupied state
β1eff etc. shown as dotted extensions to the transition arc.
β4 4
β2β1
Dq
p1
case 3: at u, entering qυ1: Guided, (D), target=vac, no orbit υ2: Guided, (D), target=vac, at-orbital υ3: Guided, (D), target=vac, super-orbitalυ4: Guided, (D), target=vac, orbit cancelledυ5: Guided, (D), target=vac, sub-orbitalυ6: Guided, (D), target=vac, sub-orbital
p2
p1
q2
q1
u D
historical state
υ5p q
occupied state
υ6 4
υ4
υ1υ2
υ3
![Page 73: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/73.jpg)
Figure 65. Entry tree logic for clusters (3) - [model t6293]
70 © Graham G. Thomason 2003-2004
symain
statechart sc
p2
p1
q2
q1
c H
historical state
γ1
p q
occupied state
γ2
γ9
γ1eff γ9eff γ11eff
γ21eff
γ3xc D γx3eff
z ζ various control functions
cases 4,5: at c or d, choosing pcase 4: γ1,δ1: Guided, (H/N), target=occ, no orbit case 4: γ9,δ9: Guided, (H/N), target=occ, super-orbital case 5: γ2,δ2: Guided, (H/N), target=occ, at-orbitalcase 5: γ3,δ3: Guided, (H/N), target=occ, sub-orbitalcase 5: γ14,δ14: Guided, (H/N), target=occ, sub-orbital
d N
xd D
same as above with events δ1-δ24
γ4eff, γ14eff, γ24eff
γx2eff
γ11 γ12 γ13 γ14
γ21 γ22 γ23 γ24
γ4
γx2eff stands for γ2eff
γ12eff
γ22eff
γx3eff stands for γ3eff
γ13eff
γ23eff
![Page 74: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/74.jpg)
Figure 66. Entry tree logic for clusters (4) - [model t6294]
© Graham G. Thomason 2003-2004 71
symain
statechart sc
case 6: at e or f, entering pε1,φ1: Guided, (H/N), target=vac, no orbit ε2,φ2: Guided, (H/N), target=vac, super-orbε3,φ3: Guided, (H/N), target=vac, at-orbitalε4,φ4: Guided, (H/N), target=vac, sub-orbital ( for ε1 ε2 ε3 ε4 dho is false on entering e)
z ζ various control functions
xe
f
xf D
same as above with events φ1-4
Np xq
p2
p1
q2
q1
e
histor-icalstate
ε3
pq
occupied state
ε4
ε2ε1
D
Hxq
ε5
t N
xt D
same as above with events τ1-5
cf case 6: at h or t, entering pχ1,τ1: Guided, (H/N), target=vac, no orbit χ2,τ2: Guided, (H/N), target=vac, super-orb. χ3,τ3: Guided, (H/N), target=vac, at-orbitalχ4,τ4: Guided, (H/N), target=vac, sub-orbitalχ5,τ5: Guided, (H/N), target=vac, sub-orbital ( for χ1 χ2 χ3 χ4 dho is false on entering e)
Note that the (H) marker on cluster ‘h’ never has any effect on the choice of target-child of cluster ‘q’.
p2
p1
q2
q1
h
histor-icalstate
χ3
p
q
occupied state
χ4
χ2
χ1
xh D
H
χ5
![Page 75: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/75.jpg)
Figure 67. Entry tree logic for clusters (5) - [model t6295]
72 © Graham G. Thomason 2003-2004
sy
main
statechart sc
cases 7/8: at k, l or m, entering pcase 7: κ1,λ1,μ1: Unguided, (D/H/dho), target=occ, no orbit case 7: κ2,λ2,μ2: Unguided, (D/H/dho), target=occ, super-orbcase 8: κ3,λ3,μ3: Unguided, (D/H/dho), target=occ, at-orbitalcase 8: κ4,λ4,μ4: Unguided, (D/H/dho), target=occ, sub-orbital
p2
p1
q2
q1
k D
historical state
p q
occupied state
κ3
κ1
κ1eff
κ2eff
κ9κ2
κx3eff
κx2eff
l H same as k above with events λ1- λ14but all target p1
Nm
xm D
historical cluster
p3historical state
same as k above with events μ1- μ14so μ4eff μ14eff target p2
Note that the current cluster always acts
as a more recent equivalent to history
than the formal historical cluster.
xk
xl
κ13
κ11 κ12
κ14κx4effκ4
![Page 76: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/76.jpg)
Figure 68. Entry tree logic for clusters (6) - [model t6296]
© Graham G. Thomason 2003-2004 73
sy
main
statechart sc
cases 9/10: at n, the outer cluster p, or r, entering the outer cluster pcase 9: ν1: Unguided, (D/H/dho), targ=vac, orbital, history availablecase 9: ν2: Unguided, (D/H/dho), targ=vac, non-orb, history availablecase 10:ν1history cleared: Unguided, (D/H/dho), targ=vac, orbital, history not availablecase 10:ν2 history cleared: Unguided, (D/H/dho), targ=vac, non-orb, history not availableSimilarly π1,ρ1 etc
N same as n above with events ρ1-2r
xr D
ρ1
r9
p2
p1
q2
q1
n D
historical state
p q n9
historical state
historical state
ν2ν1
ν1eff ν2eff
(history cleared)ν1eff
ν2eff
occupied state
p2
p1
q2
q1
p H
historical state
p q
historical state
historical state
π2π1
π1eff π2eff
(history cleared)π1eff
π2eff
p9
occupied state
occupied state
ρ2
![Page 77: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/77.jpg)
Figure 69. Entry tree logic for clusters (7) - [model t6297]
74 © Graham G. Thomason 2003-2004
sy
main
statechart sc
p2
p1
q2
q1
s N
historical state
p q s9
historical state
historical state
σ1σ2
σ2eff σ1eff
case 11: at s, entering pσ1: Unguided, no history, target=vacant, orbital, history availableσ2: Unguided, no history, target=vacant, non-orbital, history available
occupied state
![Page 78: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/78.jpg)
Figure 70. Entry tree logic for sets [model t6305]
Note that the target states may be in direct hierarchical (i.e. ancestral) relationship, though in such cases the higher member is redundant in the target specification. This applies to the target x2 above.
© Graham G. Thomason 2003-2004 75
sy
main
statechart sc
x
p5
q5
x1
x2
x3
x4 y4
x5
y5
y1
y2
y3p2
q2
p3
q3
p1
q1
ξ1->x.x1.((x2/\x2.x3.y4.q5)/\y2.q2)which, in scope sc.sy.main evaluates to[ [ x2,x1,x,main,sy,sc], [q5,y4,x3,x2,x1,x,main,sy,sc], [ q2,y2,main,sy,sc]]
w
r2historical
state
D
z
effective transition target states shown thus:
![Page 79: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/79.jpg)
6.9 Exercising Nondeterminism
The 5000-series of models exercises nondeterminism quite extensively. In this section we add a few heavy-duty examples.
76 © Graham G. Thomason 2003-2004
![Page 80: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/80.jpg)
6.9.1 Set Transit NondeterminismFigure 71. Set Transit Nondeterminism [models t6310, t6311]Model t6310 is shown (9 sets to exit). Model t6311 contains just member b (7 sets to exit).Note: event β1, (and more so σ and β2), is likely to cause combinatorial explosion.
© Graham G. Thomason 2003-2004 77
a
b
s
ba
bab
baba
t
α
q
bb
bc
β1
β2
β9
β9
tt
statechart sc
n=n+"s"x=x+"s"
n and x are string variables
n=n+" q"x=x+" q"
q1a
q1b
q1
n=n+"1"x=x+"1"
n=n+"a"x=x+"a"
n=n+"b"x=x+"b"
q2a
q2b
q2
n=n+"2"x=x+"2"
n=n+"a"x=x+"a"
n=n+"b"x=x+"b"
q3a
q3b
q3
n=n+"3"x=x+"3"
n=n+"a"x=x+"a"
n=n+"b"x=x+"b"
pn=n+" p"x=x+" p"
p1a
p1b
p1
n=n+"1"x=x+"1"
n=n+"a"x=x+"a"
n=n+"b"x=x+"b"
p2a
p2b
p2
n=n+"2"x=x+"2"
n=n+"a"x=x+"a"
n=n+"b"x=x+"b"
p3a
p3b
p3
n=n+"3"x=x+"3"
n=n+"a"x=x+"a"
n=n+"b"x=x+"b"
n=n+" ba"x=x+" ba"
n=n+" babbb"x=x+" babbb" etc.
n=n+" T"x=x+" T"
n=n+" bab"x=x+" bab"
bababbabaa
n=n+" baba"x=x+" baba"
babbbbabba
n=n+" babb"x=x+" babb"babb
baa
baaa
n=n+" baa"x=x+" baa"
baaabbaaaa
n=n+" baaa"x=x+" baaa"
baabbbaaba
n=n+" baab"x=x+" baab"baab
σ
n=n+" B"x=x+" B"
applies to cluster b.
n=n+" A"x=x+" A"
applies to cluster a.
bdβ2
β9Note fork
nondeterminism on β2
![Page 81: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/81.jpg)
Figure 72. Race and fork nondeterminism in separate sets [models t6350, t6351]
The full model t6350 is as shown with all transitions in place, including the ones struck out.We restrict this in t6351 by excluding some transitions as shown by strike-out.
Under the restricted race condition permutation modemed_set_tran
which gives 2n permutations of n elements (see comments following Figure 41), we have the following data on event φ.
Table 5.World generation in model t6350
NFnr. of forks
NRnr. in race
nr of worlds2NF.2.NR
Full Model t6350 5 5 25.2.5 = 320Restricted Model t6351 3 4 24.2.4 = 64
78 © Graham G. Thomason 2003-2004
sy
y
statechart sc
z
f
f1
f1a
f1bφ5{v=v+"5";}
φ6{v=v+"6";} f1c
f2
f2a
f2bφ7{v=v+"7";}
φ8{v=v+"8";} f2c
e
e1
e1a
e1bφ1{v=v+"1";}
φ2{v=v+"2";} e1c
e2
e2a
e2bφ3{v=v+"3";}
φ4{v=v+"4";} e2c
za
zbφ9{v=v+"9";}
φ10{v=v+"0";} zc
![Page 82: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/82.jpg)
6.10 Finding Active EventsFigure 73. Finding active events [model t6410]
Note that on-transition events and variables are evaluated in source-state scope, states in state parent scope. So $α references the local event α in the examples in cluster a above; $$α is needed to reference the global α.
© Graham G. Thomason 2003-2004 79
sy
statechart sc
a1
a3
a
a2
β1
β2
p
q
b1
αγ1
z
γ2
b
r
s
b2
z1 z2
v=6
v=6
α
α
α $α($v) =α(v)
α($$v)$$α(v)
α, β1, ζ1
ι2 α2
ζ2
γ1(v)δ1(v)
$$α($$v)α(v,$$v)
$$α(v,$$v,v,col1,str1,bool1)α(bool1)
α1
ι1
θ
θ
ι1(v)
ι2(v)
ydead
zdead
col1=blue str1="abc"range enumerated
bool1=trueboolean string event
![Page 83: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/83.jpg)
6.11 Upon Exit/Upon Enter
These actions are adequately exercised in model t5170.
We reserved model number t6420 for additional tests if needed.
Figure 74. Upon Enter / Upon Exit [model t6420]
6.12 Exercising HistoryHistory is adequately tested in model t5220.
We reserved model number t6430 for additional tests if needed.
Figure 75. Model to exercise history [model t6430]
80 © Graham G. Thomason 2003-2004
Reserved
Reserved
![Page 84: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/84.jpg)
7. Stress Testing
7.1 Axes of Stress TestingThe main axes along which stress tests can be constructed are size
- broad but shallow (cluster/set)- deep (cluster/set)
execution speed- deterministic situations- nondeterministic situations
Some performance statistics are given, but timings may vary with the exact loading on the computer, in terms of core and mass memory, and any additional cpu loading (though the tests were run without any deliberate extra loading).
Notation: In the performance tables that follow, if an event is denoted as “,β” or “then β” this refers to processing event β after some previous event(s) – the context should make it obvious which events. The timing data will apply to the time to process β excluding the time taken by previous events.
7.2 Model Generation.
The models in this section are generated by generation programs.Some common code for this is located in the mk_sc directory alongside the rest of STATECRUNCHER. The model generation modules themselves are located in the test model directory, alongside the place where the model itself is created, e.g. in directory ..StCr\StCr3ModelsTest\t7000st\t7110_stress_broad_clusters
The generation modules are normally loaded with STATECRUNCHER. A typical predicate to generate a module is mk_t7110(10,12). // k=10, n=12
The test suite regenerates the models with the parameters as set in the test scripts.
© Graham G. Thomason 2003-2004 81
![Page 85: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/85.jpg)
7.3 Combinatorial Explosion and Limited PermutationNote that a major cause of slow performance is combinatorial explosion, due to the generation of permutations. The permutation options are denoted by FLAGs as follows
Table 6. Flags for permutation control
1 permutation 1 permutationbackwards
2 permutationsforwards and backwards
2n permutationsall cyclic and anticyclic
All n! permutations
f_k1b f_k1b f_k2 f_k3a f_1
The race (transition selection) permutation flag is stored in me_permute_trnsel_flag(FLAG).
The set-transit permutation flag is stored in me_permute_settrnd_flag(FLAG).
The flags can be set by me_set_permute_trnsel_flag(FLAG). (FLAG can be f_k1b, f_k2, f_k3a, f_1) me_set_permute_settrnd_flag(FLAG). (FLAG can be f_k1a, f_k2, f_k3a, f_1)
These forms of nondeterminism can also be switched by me_no_race. // equivalent to me_set_permute_trnsel_flag(f_k1b). me_low_race. // equivalent to me_set_permute_trnsel_flag(f_k2). me_med_race. // equivalent to me_set_permute_trnsel_flag(f_k3a). me_high_race. // equivalent to me_set_permute_trnsel_flag(f_1).
me_no_set_tran. // equivalent to me_set_permute_settrnd_flag(f_k1a). me_low_set_tran. // equivalent to me_set_permute_settrnd_flag(f_k2). me_med_set_tran. // equivalent to me_set_permute_settrnd_flag(f_k3a). me_high_set_tran. // equivalent to me_set_permute_settrnd_flag(f_1).
See also the descriptions after Figure 40 and Figure 41.
82 © Graham G. Thomason 2003-2004
![Page 86: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/86.jpg)
Figure 76. Broad clusters [model t7110]
To generate this model: mk_t7110(20,25). // k=20, n=25
Table 7.Performance statistics of model t7110
Model params
Event PROLOG Op.System
Processorspeed
PermPmset-tran
PermPmrace
Time
(20,25) α SWI 5.0.3 Win98 300MHz f_k3a f_k3a 1s(20,25) then β SWI 5.0.3 Win98 300MHz f_k3a f_k3a 2s
© Graham G. Thomason 2003-2004 83
sy
y1 y4x1 y2 y3 y5 yn...
y1 y4x2 y2 y3 y5 yn...
y1 y4xk ky2 y3 y5 yn...
...
α α α α α α
α α α α α α
α α α α α α
β
β
β
![Page 87: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/87.jpg)
Figure 77. Broad sets [model t7120]
Note that this model can perform a massive set of transitions on α (but without exiting any sets), or any individual transition on αxyTo generate this model: mk_t7120(3,4).
Table 8.Performance statistics of model t7120
Model params
Event PROLOG Op.System
Processorspeed
PermPmset-tran
PermPmrace
Time
(3,4) α SWI 5.0.3 Win98 300MHz f_k3a f_k3a 6s.. then ω .. .. .. f_k3a f_k3a 2m 26s.. α .. .. .. none f_k3a 6s.. then ω .. .. .. none f_k3a 0.2s.. α .. .. .. f_k3a none 0.3s.. then ω .. .. .. f_k3a none 2m 26s
84 © Graham G. Thomason 2003-2004
sy
...
p
q q
p
...
x1
q
p
q
pα,α11
α,α11
α,α12
α,α12
α,α13
α,α13
α,α1n
α,α1nc1 c2 c3 cn
p
q q
p
...
x2
q
p
q
pα,α21
α,α21
α,α22
α,α22
α,α23
α,α23
α,α2n
α,α2nc1 c2 c3 cn
p
q q
p
...
xk
q
p
q
pα,αk1
α,αk1
α,αk2
α,αk2
α,αk3
α,αk3
α,αkn
α,αknc1 c2 c3 cn
ω
![Page 88: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/88.jpg)
Detailed noteOn event ω, permutations of exited leafstates are generated, e.g. a DXLIST (definitive exit list) generated by me_sc_6a.pl: me_process_task_in_world is
[[xt_leaf, [q, c1, x1, sy, sc]], [xt_leaf, [q, c3, x1, sy, sc]], [xt_leaf, [q, c2, x1, sy, sc]], [xt_leaf, [q, c1, x3, sy, sc]], [xt_leaf, [q, c3, x3, sy, sc]], [xt_leaf, [q, c2, x3, sy, sc]], [xt_leaf, [q, c1, x2, sy, sc]], [xt_leaf, [q, c3, x2, sy, sc]], [xt_leaf, [q, c2, x2, sy, sc]]]
There are many other permutations of this list.This list is the basis of generating upon-exit actions and exit meta-events.
© Graham G. Thomason 2003-2004 85
![Page 89: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/89.jpg)
Figure 78. Deep clusters - to level 5 [model t7130]
To generate this model: mk_t7130(5).To generate a large model: mk_t7130(10). // source file 1500 lines
86 © Graham G. Thomason 2003-2004
x2x3
x4
p
qx5
α6
β6
α5
β5
p
qy5
α6
β6
α4 β4
y4
p
qx5
α6
β6
α5
β5
p
qy5
α6
β6
α2 β2
y3x4
p
qx5
α6
β6
α5
β5
p
qy5
α6
β6
α4 β4
y4
p
qx5
α6
β6
α5
β5
p
qy5
α6
β6
α3
β3
x1
y2x3
x4
p
qx5
α6
β6
α5
β5
p
qy5
α6
β6
α4 β4
y4
p
qx5
α6
β6
α5
β5
p
qy5
α6
β6
y3x4
p
qx5
α6
β6
α5
β5
p
qy5
α6
β6
α4 β4
y4
p
qx5
α6
β6
α5
β5
p
qy5
α6
β6
α3
β3
ω
![Page 90: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/90.jpg)
Table 9.Performance statistics for model t7130
Model params
Event PROLOG Op.System
Processorspeed
PermPmset-tran
PermPmrace
Time
(5) α2 SWI 5.0.3 Win98 300MHz f_k3a f_k3a 0.06s.. , ω .. .. .. .. .. 0.06s.. α5 .. .. .. .. .. 0.06s.. , ω .. .. .. .. .. 0.06s(10) α2 .. .. .. .. .. 20s.. , ω .. .. .. .. .. 20s.. α4 .. .. .. .. .. 16s.. , ω .. .. .. .. .. 16s.. α10 .. .. .. .. .. 4 s.. ,ω .. .. .. .. .. 4s
© Graham G. Thomason 2003-2004 87
![Page 91: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/91.jpg)
Figure 79. Deep Sets - to level 5 [model t7140]
To generate this model: mk_7140(5).
88 © Graham G. Thomason 2003-2004
x1
x2
x3 y3
y2
x3 y3
p
q
x4x5 y5
p
q
α,α_xxxx
β,β_xxxx
β,β_xxxy
α,α_xxxy
p
q
y4x5 y5
p
q
α,α_xxyx
β,β_xxyx
β,β_xxyy
α,α_xxyy
p
q
x4x5 y5
p
q
α,α_xyxx
β,β_xyxx
β,β_xyxy
α,α_xyxy
p
q
y4x5 y5
p
q
α,α_xyyx
β,β_xyyx
β,β_xyyy
α,α_xyyy
p
q
x4x5 y5
p
q
α,α_yxxx
β,β_yxxx
β,β_yxxy
α,α_yxxy
p
q
y4x5 y5
p
q
α,α_yxyx
β,β_yxyx
β,β_yxyy
α,α_yxyy
p
q
x4x5 y5
p
q
α,α_yyxx
β,β_yyxx
β,β_yyxy
α,α_yyxy
p
q
y4x5 y5
p
q
α,α_yyyx
β,β_yyyx
β,β_yyyy
α,α_yyyy
ω_x1
ω_xx2
ω_xxx3
ω_xxxx4 ω_xxyx4
ω_xxxy4y4
ω_xxyy4
ω_xyxx4 ω_xyyx4
ω_xyxy4y4
ω_xyyy4
ω_xxy3
ω_xxx3 ω_xxy3
ω_xy2
![Page 92: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/92.jpg)
Table 10. Performance statistics for model t7140:
Model params
Event PROLOG Op.System
Processorspeed
PermPmset-tran
PermPmrace
Timeor problem
(5) α SWI 5.0.3 Win98 300MHz f_k3a f_k3a 2m 55s.. ,ω_x1 .. .. .. .. .. global stack.. ,ω_xx2 .. .. .. .. .. 1m 9s.. α_xxxx .. .. .. .. .. 0.7s.. ,ω_x1 .. .. .. .. .. 2m 21s.. α .. .. .. none none 4.3 s.. ,ω_x1 .. .. .. .. .. 1.6s.. ,ω_xx2 .. .. .. .. .. 1.2s.. α_xxxx .. .. .. .. .. 0.7s.. ,ω_x1 .. .. .. .. .. 1.3s
© Graham G. Thomason 2003-2004 89
![Page 93: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/93.jpg)
Figure 80. Alternating sets and clusters [model t7150]
Initial states shaded for clarity.
To generate this model: mk_t7150(5). (It is best to use an odd number).
90 © Graham G. Thomason 2003-2004
x2
x3 y3
y2
x3 y3
p
q
x4x5 y5
p
q
α,α_xxxx
β,β_xxxx
β,β_xxxy
α,α_xxxy
p
q
y4x5 y5
p
q
α,α_xxyx
β,β_xxyx
β,β_xxyy
α,α_xxyy
p
q
x4x5 y5
p
q
α,α_xyxx
β,β_xyxx
β,β_xyxy
α,α_xyxy
p
q
y4x5 y5
p
q
α,α_xyyx
β,β_xyyx
β,β_xyyy
α,α_xyyy
p
q
x4x5 y5
p
q
α,α_yxxx
β,β_yxxx
β,β_yxxy
α,α_yxxy
p
q
y4x5 y5
p
q
α,α_yxyx
β,β_yxyx
β,β_yxyy
α,α_yxyy
p
q
x4x5 y5
p
q
α,α_yyxx
β,β_yyxx
β,β_yyxy
α,α_yyxy
p
q
y4x5 y5
p
q
α,α_yyyx
β,β_yyyx
β,β_yyyy
α,α_yyyy
ω_x1
ω_xx2
ω_xxx3
ω_xxxx4 ω_xxyx4
ω_xxxy4y4
ω_xxyy4
ω_xyxx4 ω_xyyx4
ω_xyxy4y4
ω_xyyy4
ω_xxy3
ω_xxx3 ω_xxy3
ω_xy2
x1
α_xx2 β_xy2
β_xxyy4α_xxyx4β_xxxy4α_xxxx4
β_xyyy4α_xyyx4β_xyxy4α_xyxx4
![Page 94: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/94.jpg)
Table 11. Performance statistics for model t7150
Model params
Event PROLOG Op.System
Processorspeed
PermPmset-tran
PermPmrace
Timeor problem
(5) α SWI 5.0.3 Win98 300MHz f_k3a f_k3a 2.5s.. ,ω_x1 .. .. .. .. .. 0.9s.. α_xx2 .. .. .. .. .. 2.5s.. ,ω_x1 .. .. .. .. .. 2.5s
© Graham G. Thomason 2003-2004 91
![Page 95: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/95.jpg)
Figure 81. Intensive fork and race non-determinism [model t7160]
To generate this model: mk_t7160(4,5). //k=4, n=5
92 © Graham G. Thomason 2003-2004
s
a
b1a1 α{v=v*10+1;}
b2b3
b4
bn...
α{v=v*10+1;}
α{v=v*10+1;}α{v=v*10+1;}
α{v=v*10+1;}
a
b1a2 α{v=v*10+2;}
b2b3
b4
bn...
α{v=v*10+2;}
α{v=v*10+2;}α{v=v2*10+2;}
α{v=v*10+2;}
a
b1a3 α{v=v*10+3;}
b2b3
b4
bn...
α{v=v*10+3;}
α{v=v*10+3;}α{v=v*10+3;}
α{v=v*10)+3;}
a
b1ak α{v=v*10+n;}
b2b3
b4
bn...
α{v=v*10+n;}
α{v=v*10+n;}α{v=v*10+n;}
α{v=v*10+n;}
...
ω _a1ω
ω _a2
ω _a3
ω _ak
![Page 96: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/96.jpg)
Table 12. Number of worlds for model t7160
For k3 For k=2 Under f_1 (full) permutations = nk . f_1(k) = nk.(k!) = nk.(k!) Under f_k3a race-permutations = nk. f_k3a(k) = nk.(2k) = nk.(k!) Under f_k2 race-permutations = nk. f_2(k) = nk.(2) = nk.(k!)
(k,n) nk f_1 f_k3a f_2 fullperm
f_k3aperm
f_k2perm
(1,1) 11=1 1!=1 1 1 1.1 = 1 1.1 = 1 1.1 = 1(1,2) 21=2 1!=1 1 1 2.1 = 2 2.1 = 2 2.1 = 2(1,3) 31=3 1!=1 1 1 3.1 = 3 3.1 = 3 3.1 = 3(1,4) 41=4 1!=1 1 1 4.1 = 4 4.1 = 4 4.1 = 4(1,5) 51=5 1!=1 1 1 5.1 = 5 5.1 = 5 5.1 = 5(2,1) 12=1 2!=2 2 2 1.2 = 2 1.2 = 2 1.2 = 2(2,2) 22=4 2!=2 2 2 4.2 = 8 4.2 = 8 4.2 = 8(2,3) 32=9 2!=2 2 2 9.2 = 18 9.2 = 18 9.2 = 18(2,4) 42=16 2!=2 2 2 16.2 = 32 16.2 = 32 16.2 = 32(2,5) 52=25 2!=2 2 2 25.2 = 50 25.2 = 50 25.2 = 50(3,1) 13=1 3!=6 6 2 1.6 = 6 1.6 = 6 1.2 = 2(3,2) 23=8 3!=6 6 2 8.6 = 48 8.6 = 48 8.2 = 16(3,3) 33=27 3!=6 6 2 27.6 = 162 27.6 = 162 27.2 = 54(3,4) 43=64 3!=6 6 2 64.6 = 384 64.6 = 384 64.2 = 128(3,5) 53=125 3!=6 6 2 125.6 = 750 125.6 = 750 125.2 250(4,1) 14=1 4!=24 8 2 1.24 = 24 1.8 = 8 1.2 = 2(4,2) 24=16 4!=24 8 2 16.24 = 384 16.8 = 128 16.2 = 32(4,3) 34=81 4!=24 8 2 81.24 = 1944 81.8 = 648 81.2 = 162(4,4) 44=256 4!=24 8 2 256.24 = 6144 256.8 = 512 256.2 = 512(4,5) 54=625 4!=24 8 2 625.24 = 15000 625.8 = 5000 625.2 = 1250(5,1) 15=1 5!=120 10 2 1.120 = 120 1.10 = 10 1.2 = 2(5,2) 25=32 5!=120 10 2 32.120 = 3840 32.10 = 320 32.2 = 64(5,3) 35=243 5!=120 10 2 243.120 = 29160 243.10 = 2430 243.2 = 486(5,4) 45=1024 5!=120 10 2 1024.120= 122880 1024.10= 10240 1024.2= 2048(5,5) 55=3125 5!=120 10 2 3125.120= 375000 3125.10= 31250 3125.2= 6250
Note that event ω does not clear variable data, and so does not reduce to one world. The actual number of worlds is Perm(k), using the selected restricted-permutation generator.
© Graham G. Thomason 2003-2004 93
![Page 97: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/97.jpg)
Table 13. Performance statistics for model t7160
[SWI-Prolog 5.0.3 / Windows98]: Model params
Event Nr of Worlds
Processorspeed
PermPmset-tran
PermPmrace
Timeor problem
(2,3) α 118 300MHz f_k3a f_k3a 1.3s(2,3) ,ω 182 .. .. .. 0.8s(2,4) α 132 .. .. .. 3.7s(2,4) ,ω 322 .. .. .. 1.8s
(3,2) α 148 .. .. .. 10.6s(3,2) ,ω 486 .. .. .. 10.0s(3,3) α 1162 .. .. .. 1m 53s(3,3) ,ω 1626 .. .. .. 3m 15s(3,4) α 1384 .. .. .. 18m 3s(3,4) ,ω 3846 .. .. .. 11m 0s
(4,2) α 1128 .. .. .. 1m 59s(4,2) ,ω 1288 .. .. .. 4m 02(4,3) α 1648 .. .. .. >1hr 30m(4,3) ,ω 6488 .. .. .. untested
[WinProlog 4.010 / Win98]:(3,4) α 1384 .. .. .. >1hr(3,4) ,ω 3846 .. .. .. untested
It was noted that uncompleted event processing, under SWI- and Win- Prolog, involved intense disk activity - it could be that with more core memory the events will complete in much less time.
94 © Graham G. Thomason 2003-2004
![Page 98: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/98.jpg)
Figure 82. Stressing transition prioritization [model t7170]
To generate this model : mk_t7170(5).
Table 14. Performance statistics for model t7170 [SWI-Prolog 5.0.3 / Win98]:
Model params
Event Worlds Processorspeed
PermPmset-tran
PermPmrace
Time
(20) α 12 300MHz f_k3a f_k3a 0.3s.. β 21 .. .. .. 0.3s
© Graham G. Thomason 2003-2004 95
x0
z1
x1
z2z3z4z5
x6
z6
x2x3
x4x5
α[bz6]
β
α[bz5] α[bz4] α[bz3] α[bz2] α[bz1]
β β β β β
y1y2y3y4y5
α[by5] α[by4] α[by3] α[by2] α[by1]
β β β β β
y6β
α[by6]
ω
![Page 99: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/99.jpg)
Figure 83. Long-chain broadcast-event non-determinism [model t7180]
To generate model to b(20): mk_t7180(20).
Table 15. Performance statistics for model t7180(20)
Model params
Event PROLOG Op.System
Processorspeed
PermPmset-tran
PermPmrace
Time
(20) β1 SWI 5.0.3 Win98 300MHz f_k3a f_k3a 1.0s(20) ,ω SWI 5.0.3 Win98 300MHz f_k3a f_k3a 16s
96 © Graham G. Thomason 2003-2004
s
β1->b1b{fire β2;}b1a b1b
β2->b2b{fire β3;}b2a b2b
b1
b2
β3->b3b{fire β4;}b3a b3b
b3
β4->b4b{fire β5;}b4a b4b
b4
βn-1->bn-1b{fire βn;}bn-1a bn-1b
bn-1
...
ω
βn->bnb;bna bnb
bn
![Page 100: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/100.jpg)
Figure 84. Broad broadcast-event nondeterminism [model t7190]
To generate this model: mk_t7190(20).
Table 16. Performance statistics for model t7190(20)
Model params
Event PROLOG Op.System
Processorspeed
PermPmset-tran
PermPmrace
Time
(20) β SWI 5.0.3 Win98 300MHz f_k3a f_k3a 1m50s(20) ,ω SWI 5.0.3 Win98 300MHz f_k3a f_k3a 23s
© Graham G. Thomason 2003-2004 97
s
β->b1b{fire γ;}b1a b1b
γ ->b2bb2a b2b
b1
b2
γ ->b3bb3a b3b
b3
γ ->b4bb4a b4b
b4
γ ->bn-1bbn-1a bn-1b
bn-1
...
ω
γ ->bnb;bna bnb
bn
![Page 101: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/101.jpg)
8. Conventions
8.1.1 Omega TransitionsStatecharts to exercise the state machine engine may contain implicit additional control transitions (named omega...) for the purpose of putting the statechart in a specific state (in particular leafstates) prior to a test.
Figure 85. Omega transitions
Notes When priming a model, omega transitions to leaf-states are all that is required. Omega
transitions to non-leaf-states are only needed in testing entry to the correct default state. The above diagram shows just one omega-transition (ω_a) to a non-leaf-state.
In order to be unique, the naming of an omega transition may have to incorporate the machine path (not necessary in the above model).
The event ω_vreset is used to reset variables, and ω_hreset to clear history, triggering an internal transition at a high level in the hierarchy
98 © Graham G. Thomason 2003-2004
statechart scs
za zbz
y
bbabbb
baabab
abaabb
aaaaab
a
baab
b
aa bb
ω_zb
ω_za
ω_aaa
...ω_abb
ω_a
![Page 102: Statecruncher Test Models - FarAboveAll.com · Web viewCompact multiple nondeterminism (4 kinds) [model t5480] This model can be used with event β to illustrate set-transit, fork,](https://reader043.fdocument.org/reader043/viewer/2022020412/5ae31bc57f8b9a097a8dbe9f/html5/page/102.jpg)
9. STATECRUNCHER References
STATECRUNCHER documentation and papers by the present author
Main Thesis [StCrMain] The Design and Construction of a State Machine System that Handles Nondeterminism
Appendices
Appendix 1 [StCrContext] Software Testing in Context
Appendix 2 [StCrSemComp] A Semantic Comparison of STATECRUNCHER and Process Algebras
Appendix 3 [StCrOutput] A Quick Reference of STATECRUNCHER's Output Format
Appendix 4 [StCrDistArb] Distributed Arbiter Modelling in CCS and STATECRUNCHER - A Comparison
Appendix 5 [StCrNim] The Game of Nim in Z and STATECRUNCHER
Appendix 6 [StCrBiblRef] Bibliography and References
Related reports
Related report 1 [StCrPrimer] STATECRUNCHER-to-Primer Protocol
Related report 2 [StCrManual] STATECRUNCHER User Manual
Related report 3 [StCrGP4] GP4 - The Generic Prolog Parsing and Prototyping Package (underlies the STATECRUNCHER compiler)
Related report 4 [StCrParsing] STATECRUNCHER Parsing
Related report 5 [StCrTest] STATECRUNCHER Test Models
Related report 6 [StCrFunMod] State-based Modelling of Functions and Pump Engines
© Graham G. Thomason 2003-2004 99