State Machine Design - Help-A-Bull · Synchronous Sequential Machine A synchronous sequential...
54
State Machine Design 1
Transcript of State Machine Design - Help-A-Bull · Synchronous Sequential Machine A synchronous sequential...
State Machine Design
1
Topics
• Finite State Machine Model • Capabilities & Limitations of FSMs • State Equivalence and Minimization • Simplification of Incompletely Specified
Machines
2
Finite State Machine Model
• Deterministic machines: Next state S(t + 1) determined uniquely by the present state S(t) and the present input x(t).
S(t + 1) = δ {S(t), x(t)} Where δ is called the state transition function. Output z(t) can be determined in two ways: z(t) = λ {S(t), x(t)} or z(t) = λ {S(t)} 3
Synchronous Sequential Machine
A synchronous sequential machine M is a quintuple M = (I, O, S, δ, λ) Where I, O, and S are finite, nonempty sets of
inputs, output, and states, respectively. δ: I x S → S is the start transition function λ is the output function such that λ: I x S → O for Mealy machines λ: S → O for Moore machines
4
Input/Output Transformations
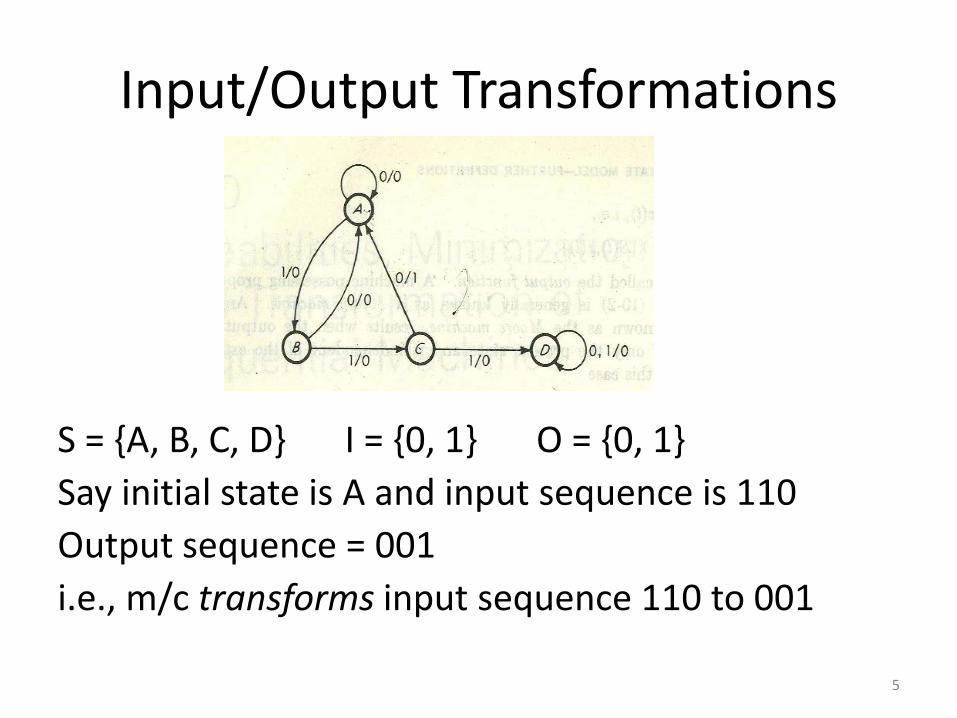
S = {A, B, C, D} I = {0, 1} O = {0, 1} Say initial state is A and input sequence is 110 Output sequence = 001 i.e., m/c transforms input sequence 110 to 001
5
Input/Output Transformations
• Any problem that can be expressed as transformation of sequences can be solved by an FSM
• Also, FSM can be used to determine whether a given input sequence is a member of some pre-specified set of sequences
6
Problem • Design an FSM that generates a 1 whenever it
detect a pattern “1101”
7
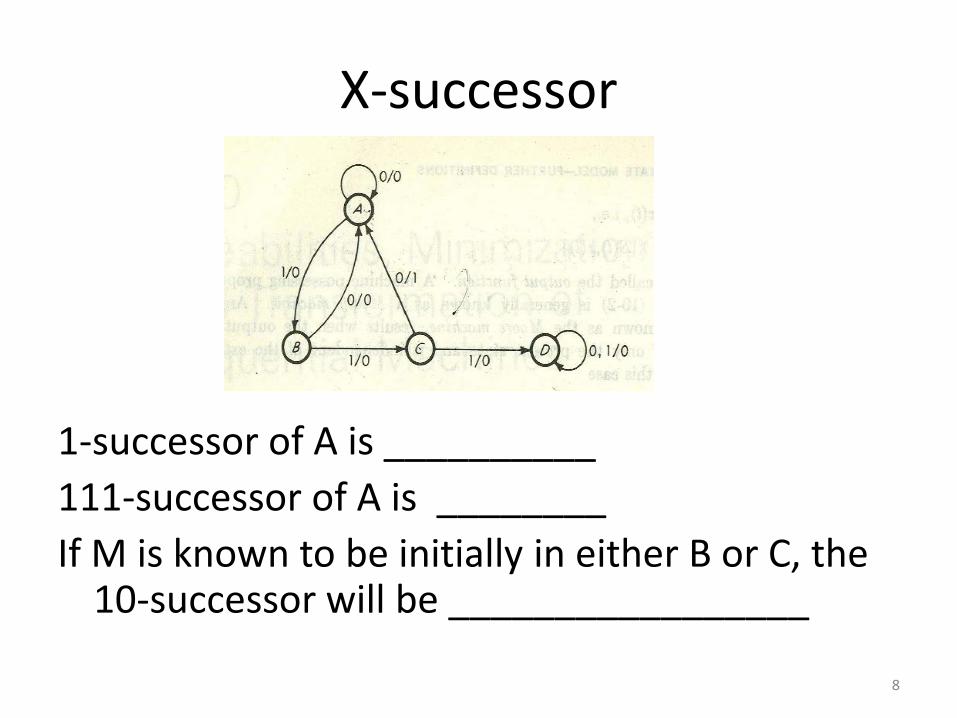
X-successor
8
1-successor of A is __________ 111-successor of A is ________ If M is known to be initially in either B or C, the
10-successor will be _________________
Definitions
• If an input sequence X takes a machine from Sa to Sb, then Sb is the said to be the X-successor of Sa
• A state is called a terminal state, if either the state is a – sink state - has no outgoing arcs to other states – source state – has no incoming arcs from other
states
9
Strongly connected machine
• If for every pair of states Sa and Sb of a machine M there exists an input sequence which takes M from Sa to Sb, then M is said to be strongly connected.
10
State Equivalence and Minimization
• Redundant state – A state whose function can be achieved by
another state
• Redundant states cost hardware – Number of bits used is prop. to states.
11
k-equivalence
• Two states Sa and Sb of machine M are distinguishable if and only if there exists at least one finite input sequence for which M produces different output sequences on whether Sa or Sb is the initial state.
• The sequence which distinguishes these states is called a distinguishing sequence of the pair (Sa ,Sb)
• If there exists for pair (Sa ,Sb) a distinguishing sequence of length k, the states are said to be k-distinguishable
12
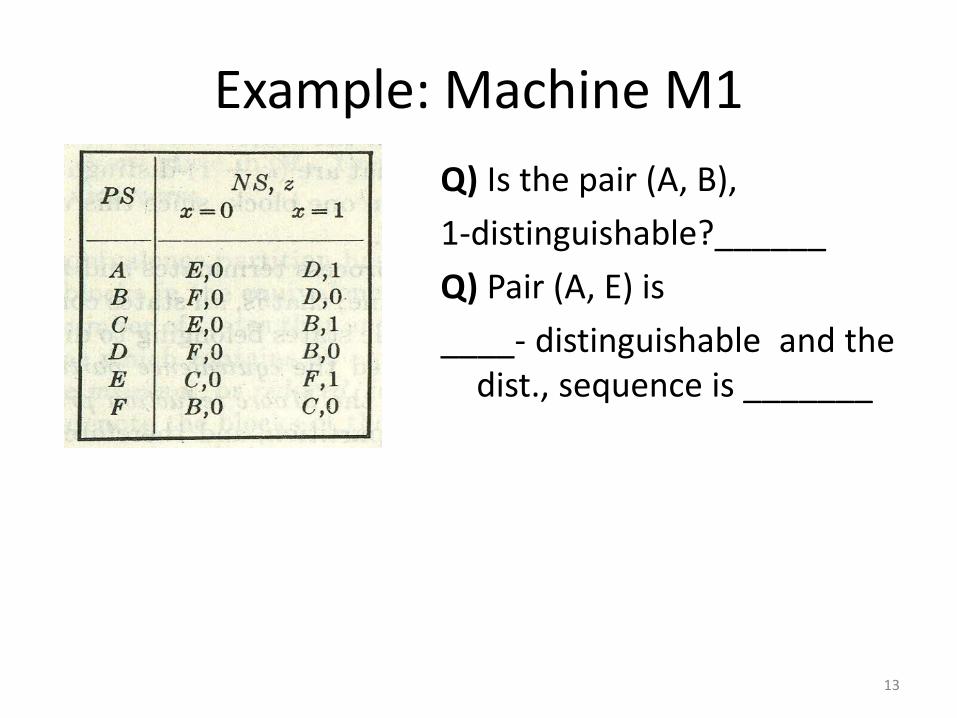
Example: Machine M1
13
Q) Is the pair (A, B), 1-distinguishable?______ Q) Pair (A, E) is ____- distinguishable and the
dist., sequence is _______
• States that are not k-distinguishable are said to be k-equivalent – For example, (A, E) of M1 are 2-equivalent
• States which are k-equivalent are also r-equivalent for all r < k
• States that are k-equivalent for all k are said to be equivalent
14
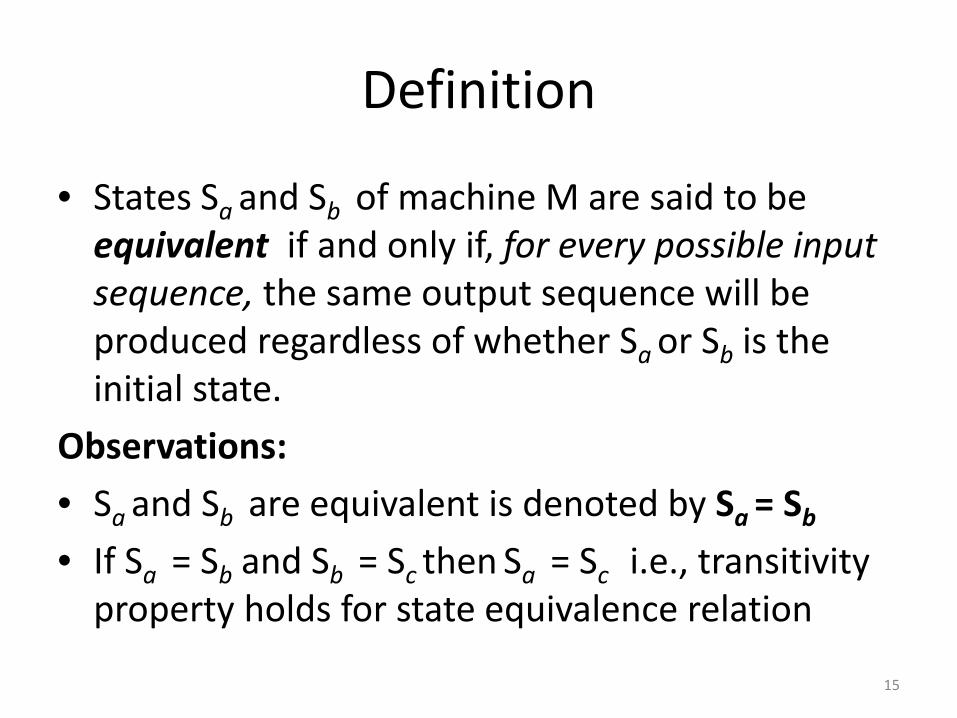
Definition
• States Sa and Sb of machine M are said to be equivalent if and only if, for every possible input sequence, the same output sequence will be produced regardless of whether Sa or Sb is the initial state.
Observations: • Sa and Sb are equivalent is denoted by Sa = Sb
• If Sa = Sb and Sb = Sc then Sa = Sc i.e., transitivity property holds for state equivalence relation
15
State equivalence is an equivalence relation
• Show that this is true.
16
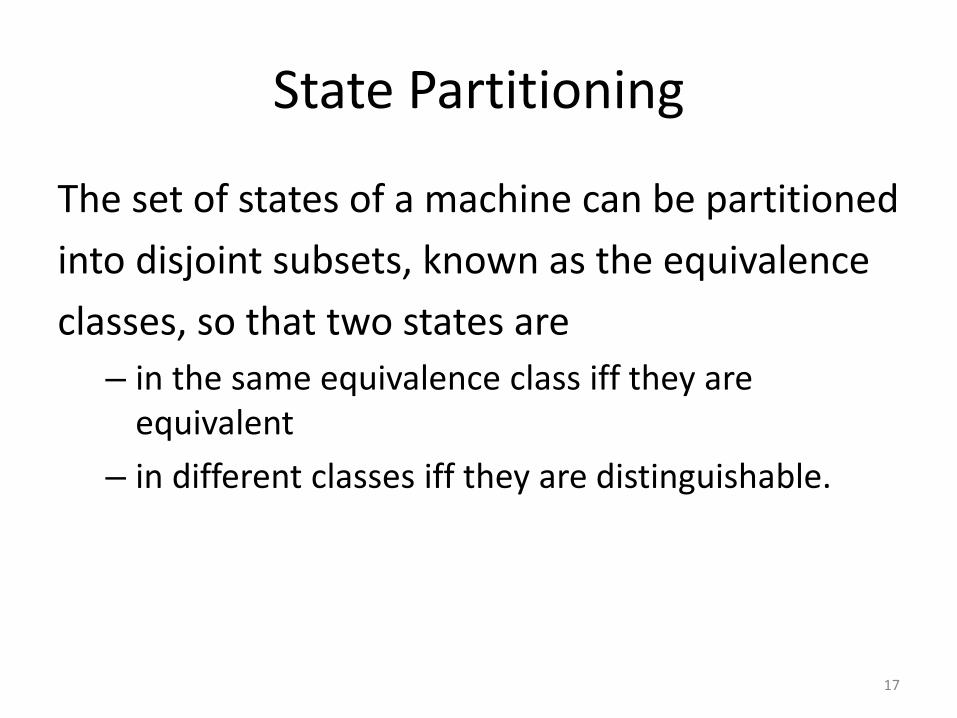
State Partitioning
The set of states of a machine can be partitioned into disjoint subsets, known as the equivalence classes, so that two states are
– in the same equivalence class iff they are equivalent
– in different classes iff they are distinguishable.
17
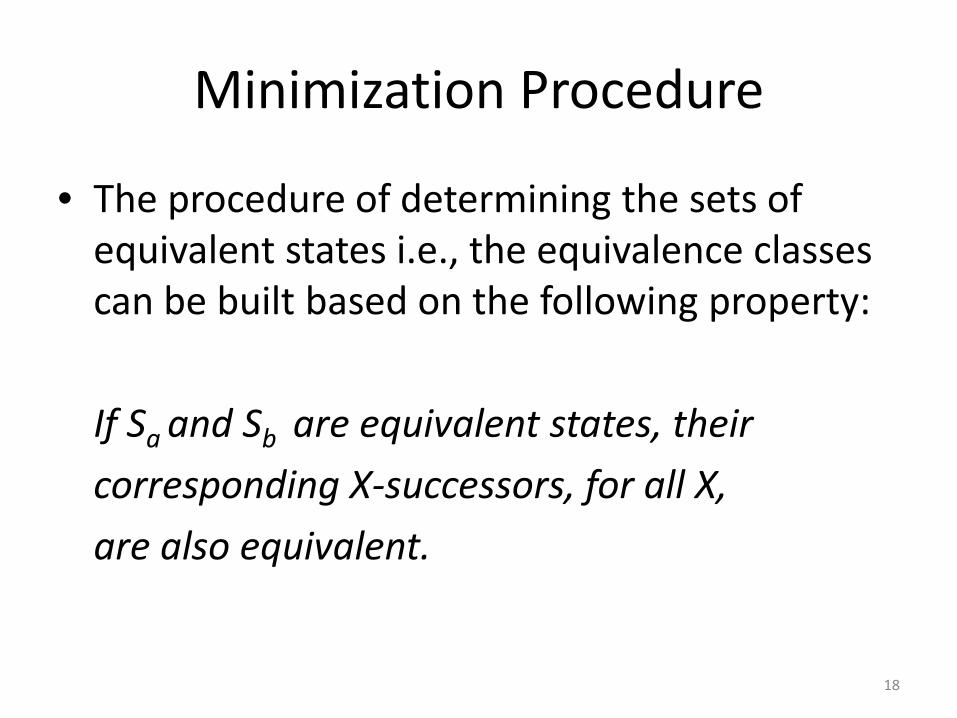
Minimization Procedure
• The procedure of determining the sets of equivalent states i.e., the equivalence classes can be built based on the following property:
If Sa and Sb are equivalent states, their corresponding X-successors, for all X, are also equivalent.
18
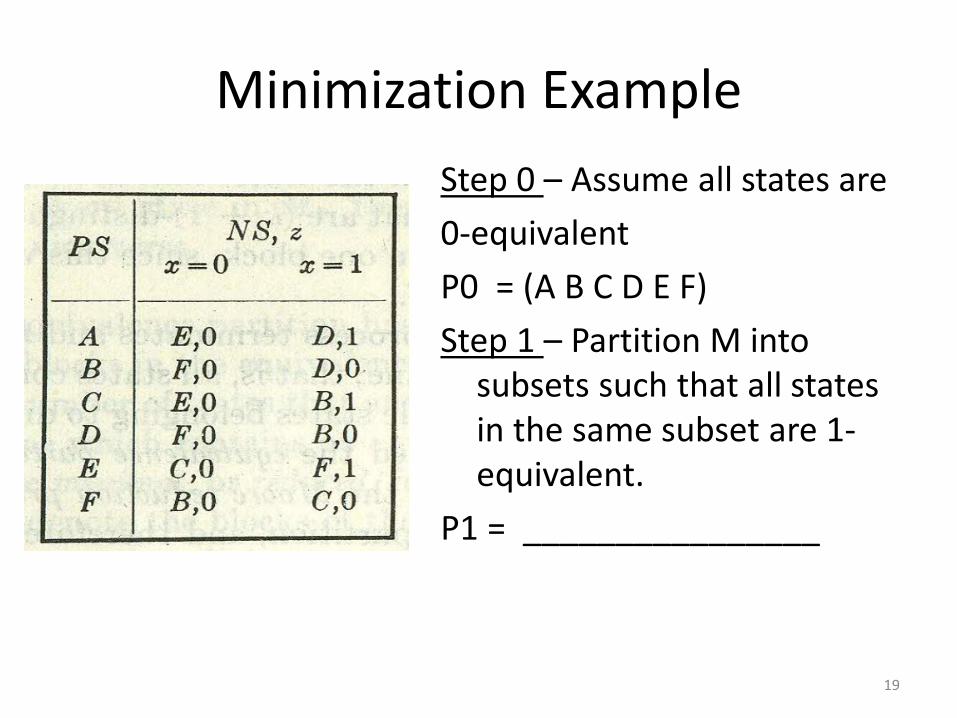
Minimization Example
19
Step 0 – Assume all states are 0-equivalent P0 = (A B C D E F) Step 1 – Partition M into
subsets such that all states in the same subset are 1-equivalent.
P1 = ________________
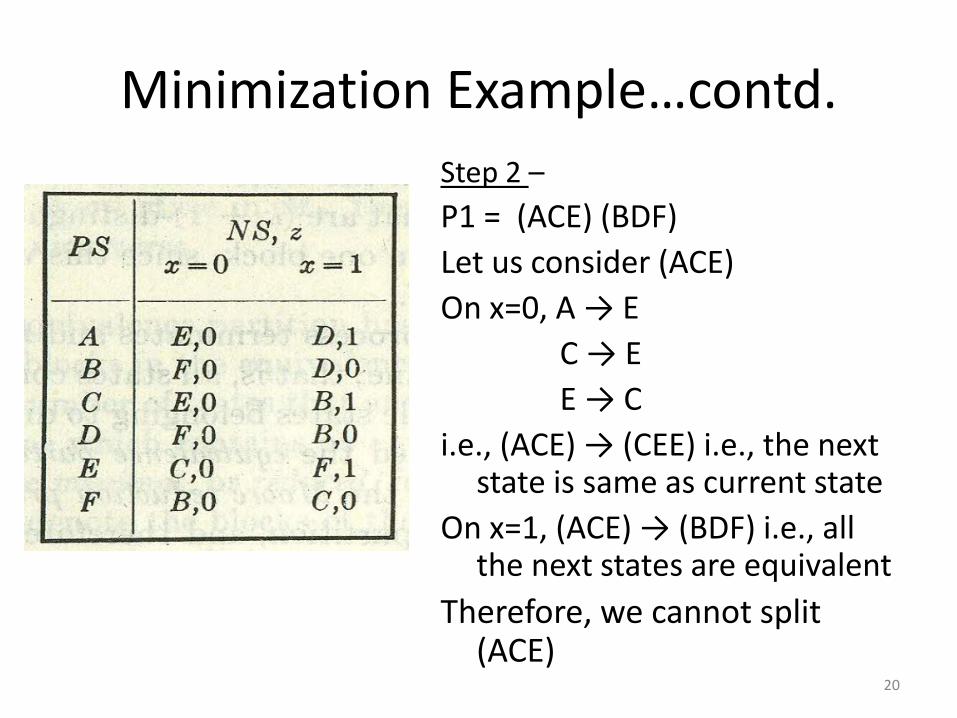
Minimization Example…contd.
20
Step 2 – P1 = (ACE) (BDF) Let us consider (ACE) On x=0, A → E C → E E → C i.e., (ACE) → (CEE) i.e., the next
state is same as current state On x=1, (ACE) → (BDF) i.e., all
the next states are equivalent Therefore, we cannot split
(ACE)
Minimization Example…contd.
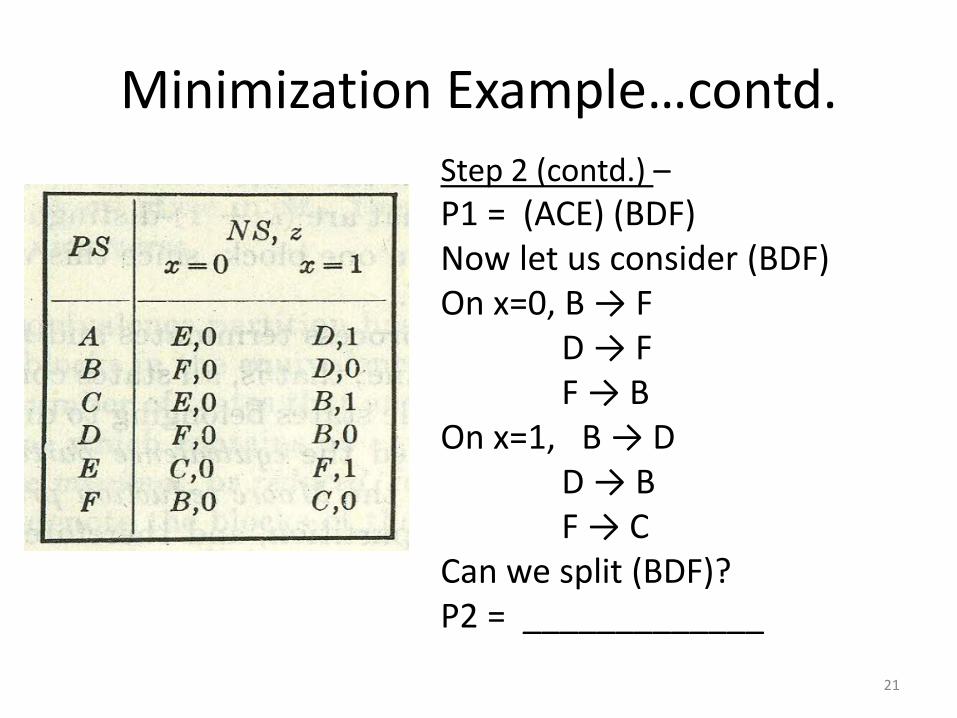
21
Step 2 (contd.) – P1 = (ACE) (BDF) Now let us consider (BDF) On x=0, B → F D → F F → B On x=1, B → D D → B F → C Can we split (BDF)? P2 = _____________
Minimization Example…contd.
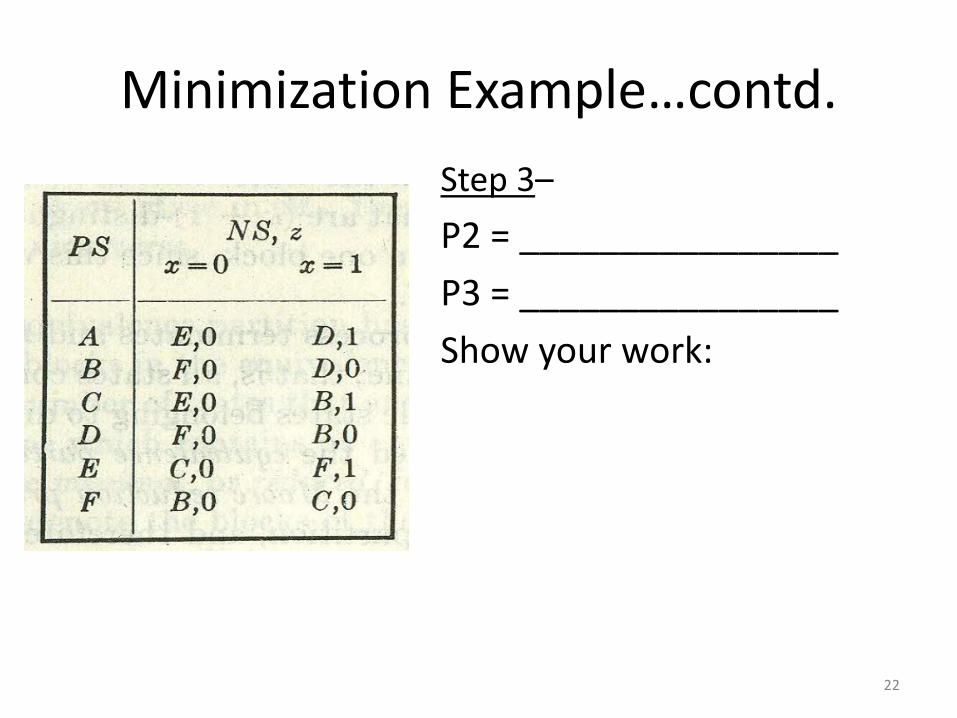
22
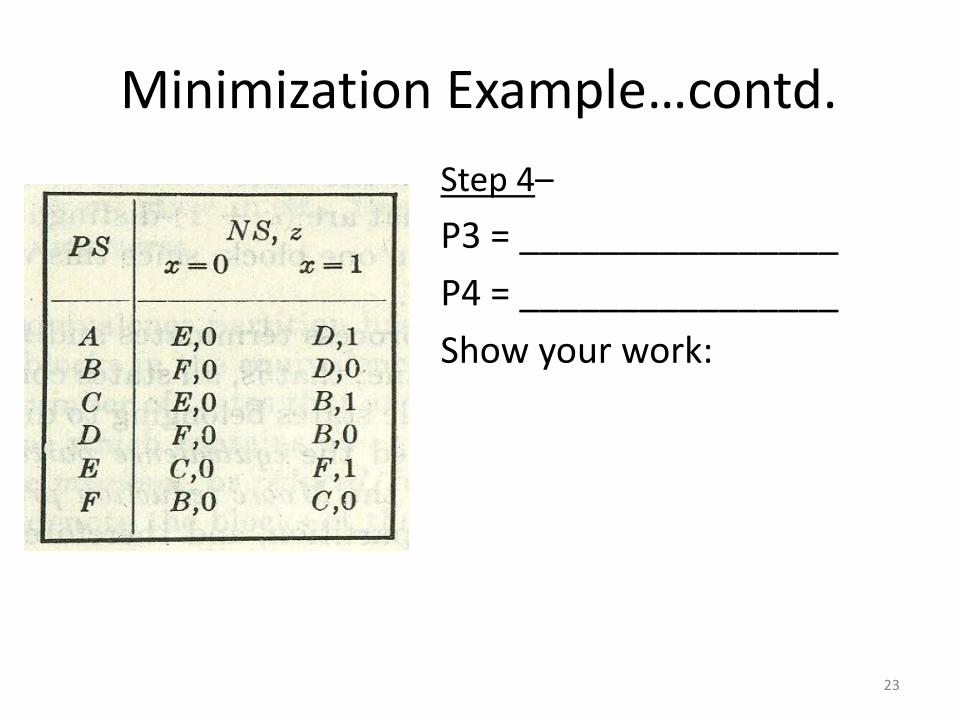
Step 3– P2 = ________________ P3 = ________________ Show your work:
Minimization Example…contd.
23
Step 4– P3 = ________________ P4 = ________________ Show your work:
Minimization Example…contd.
24
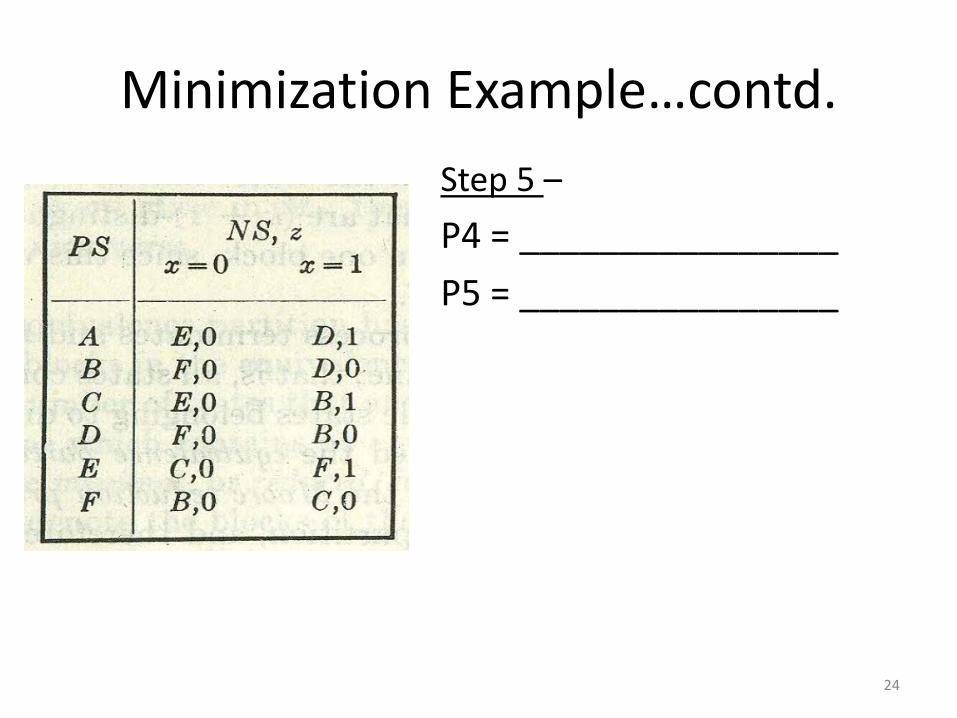
Step 5 – P4 = ________________ P5 = ________________
Theorem 10-1
Theorem 10-1: The equivalence partition is unique.
Proof:
25
Theorem 10-2
Theorem 10-2: If two states Sa and Sb of machine M are distinguishable, then they are distinguishable by a sequence of length n-1 or less, where n is the number of states in M.
Proof:
26
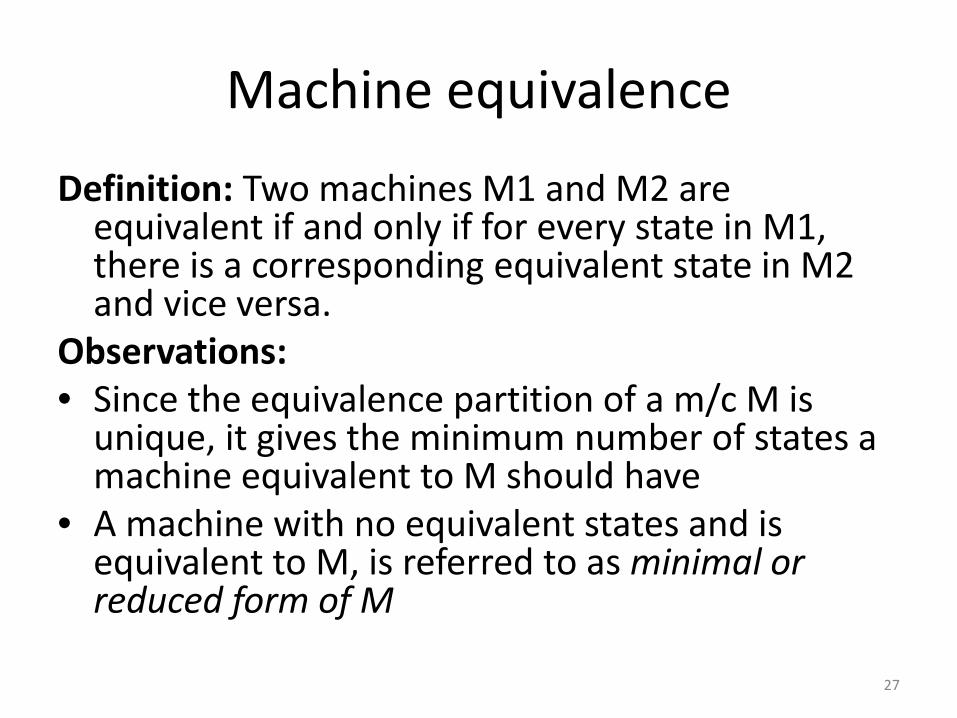
Machine equivalence
Definition: Two machines M1 and M2 are equivalent if and only if for every state in M1, there is a corresponding equivalent state in M2 and vice versa.
Observations: • Since the equivalence partition of a m/c M is
unique, it gives the minimum number of states a machine equivalent to M should have
• A machine with no equivalent states and is equivalent to M, is referred to as minimal or reduced form of M
27
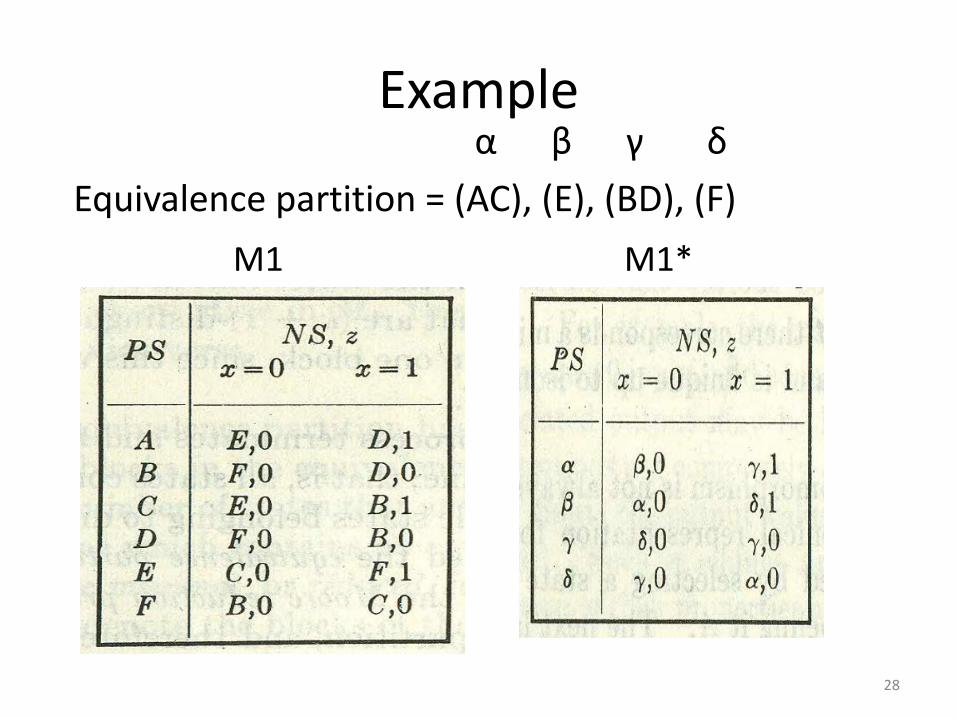
Example
28
α β γ δ Equivalence partition = (AC), (E), (BD), (F)
M1 M1*
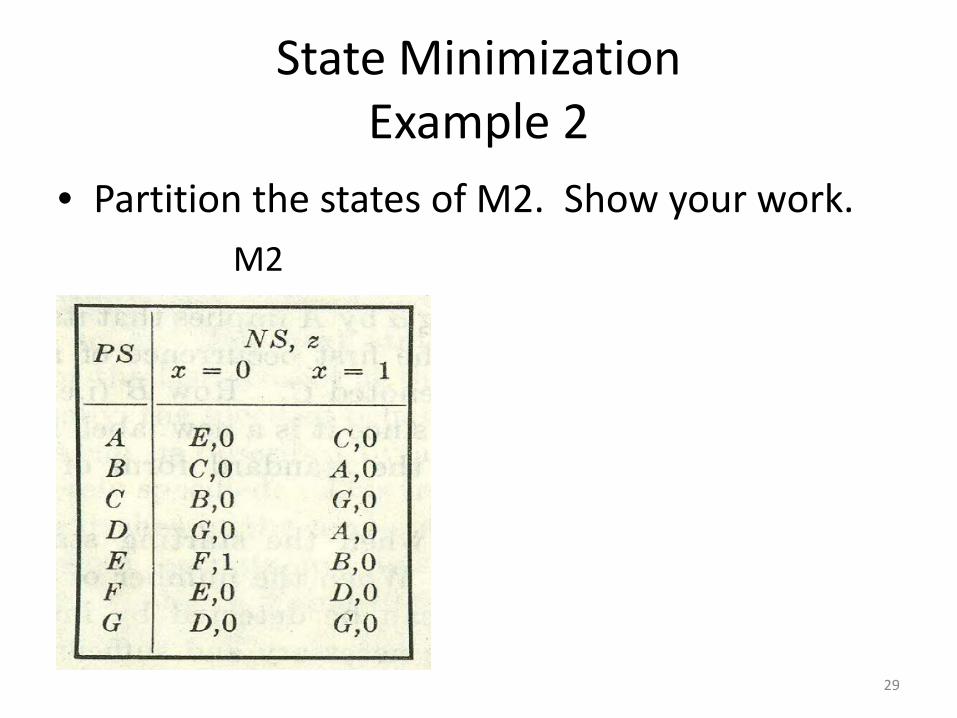
State Minimization Example 2
• Partition the states of M2. Show your work.
29
M2
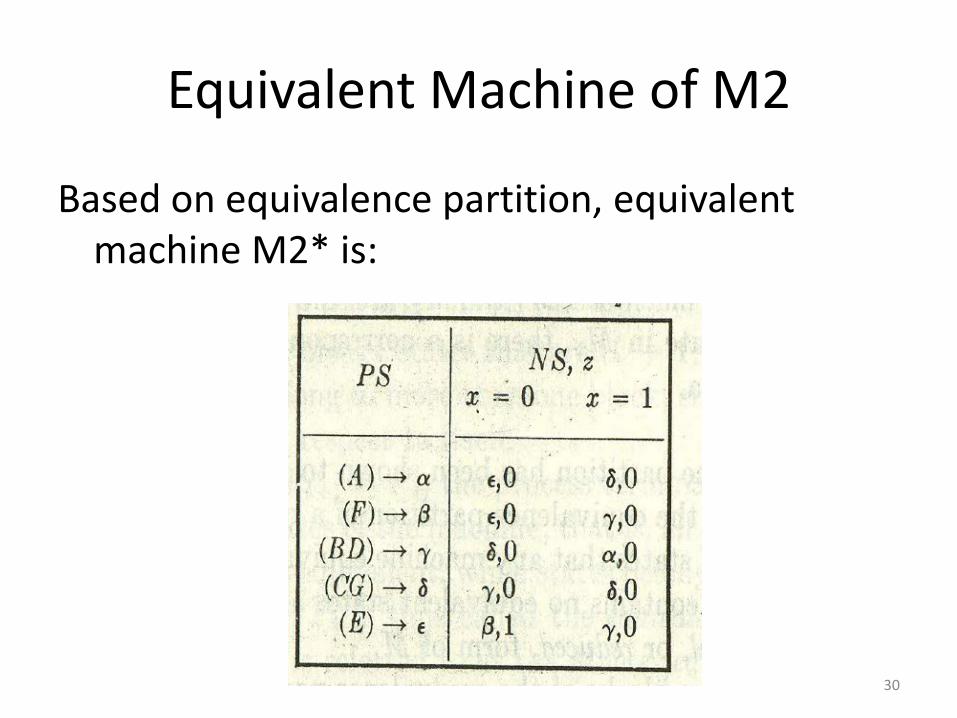
Equivalent Machine of M2
Based on equivalence partition, equivalent machine M2* is:
30
Isomorphism
• Labels α, β,… is chosen arbitrarily • Different assignment will give a machine with
same behavior • If one machine can be obtained from the
other by relabeling its states, they are said to be isomorphic to each other
31
Theorem: To every machine M there corresponds a minimal machine M* which is equivalent to M and is unique up to isomorphism
Detection of isomorphism is not always easy and
can be accomplished by using a canonical representation of the machine.
32
Canonical representation
• Select a state and label it A (preferably the start state if specified)
• Next labels are chosen such that when read from left to right, the first occurrence of each new label will be in alphabetical order
33
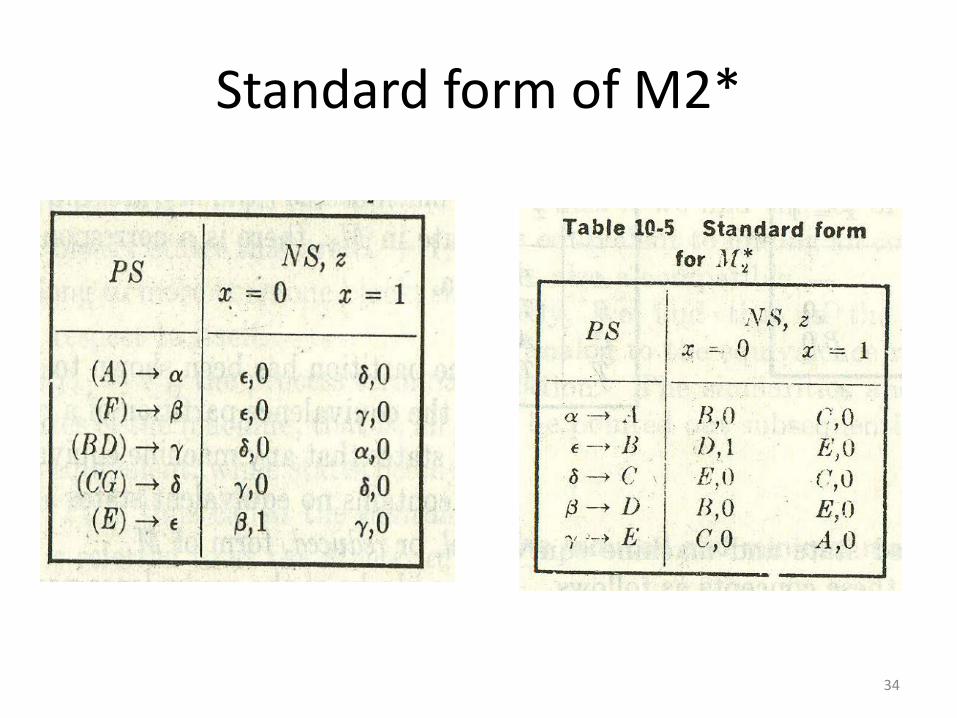
Standard form of M2*
34
Incompletely Specified Machines
• For a machine, – For a given input in a state, the next state and
output may not be specified, because that input never occurs
– For a given input, next state is specified, but the output is not, because the output value may not be critical (don’t-care)
Such a machine is known as an incompletely specified machine.
35
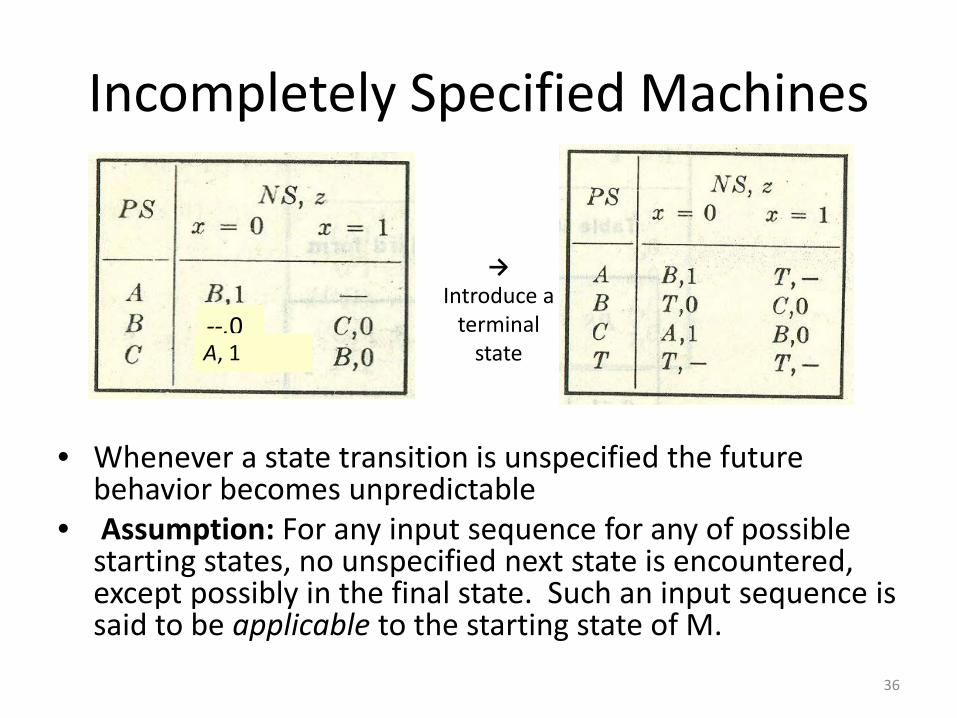
Incompletely Specified Machines
• Whenever a state transition is unspecified the future behavior becomes unpredictable
• Assumption: For any input sequence for any of possible starting states, no unspecified next state is encountered, except possibly in the final state. Such an input sequence is said to be applicable to the starting state of M.
36
--,0 A, 1
→ Introduce a
terminal state
Definitions
• State Sa of M1 is said to cover, or contain, Sb of M2 if and only if every input sequence applicable to Sb is also applicable to Sa, and its application to both M1 and M2 when they are initially in Sa and Sb, respectively, results in identical output sequences whenever the outputs of M2 are specified
• Machine M1 is said to cover machine M2 iff for every Sb in M2, there is a corresponding state Sa in M1 such that Sa covers Sb
37
Definitions…contd.
• Two states Sa and Sb of machine M are compatible if and only if for every input sequence applicable to both Sa and Sb the same output sequence will be produced whenever both outputs are specified regardless of whether Sa or Sb is the initial state. – In other words, Sa and Sb are compatible iff their
outputs are not conflicting and their X-successors are either the same or also compatible (for every X)
– We can generalize: a set of states (Sa , Sb , Sc ,…) is called a compatible if all its members are compatible
38
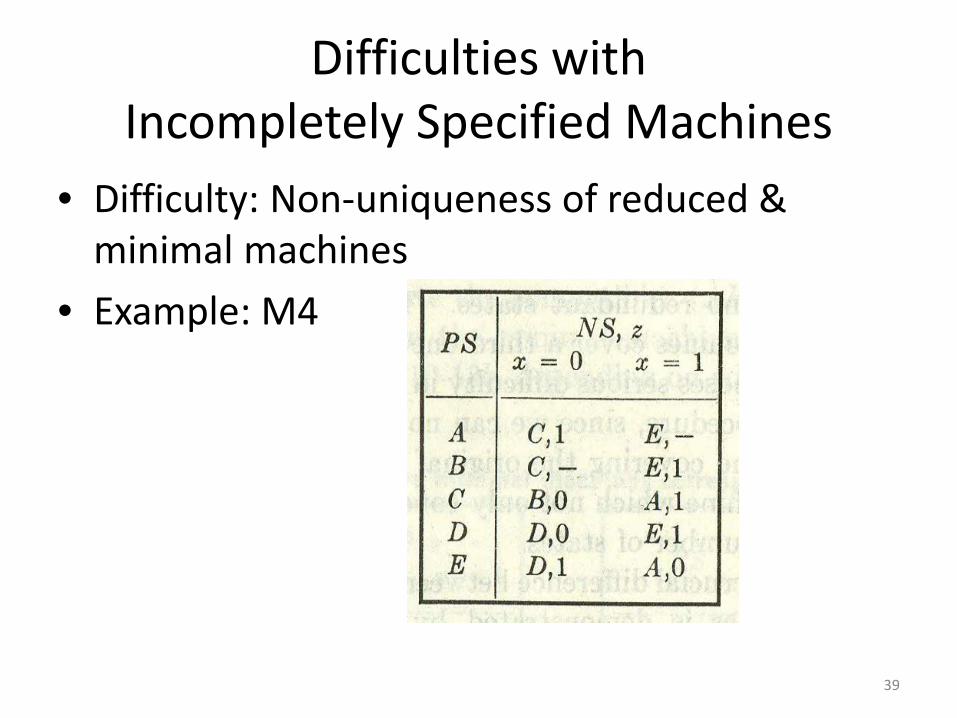
Difficulties with Incompletely Specified Machines
• Difficulty: Non-uniqueness of reduced & minimal machines
• Example: M4
39
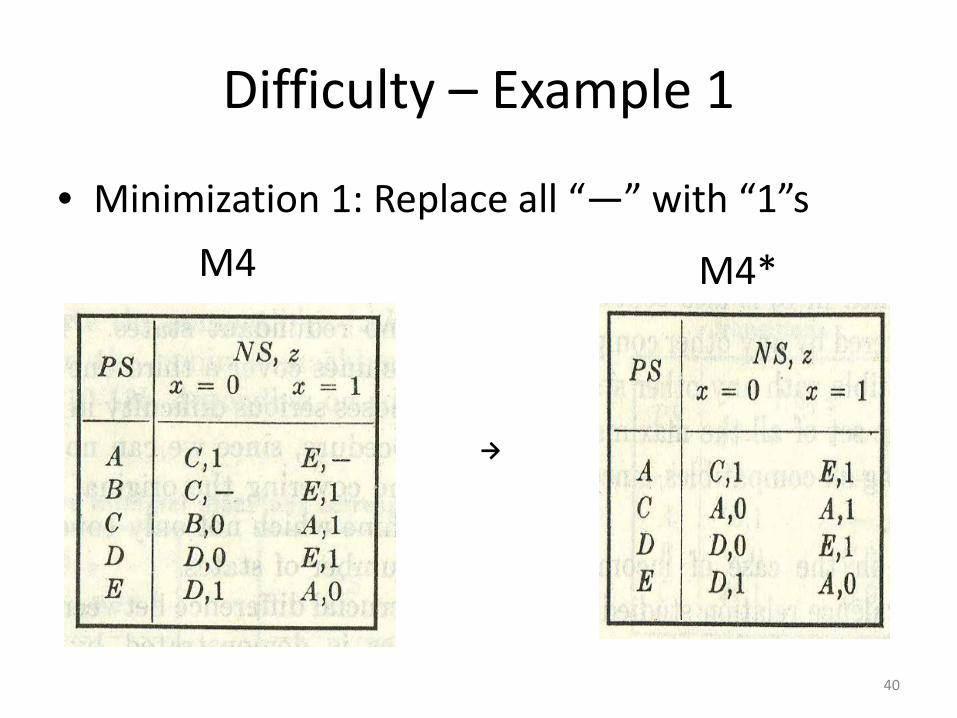
Difficulty – Example 1
• Minimization 1: Replace all “—” with “1”s
40
→
M4 M4*
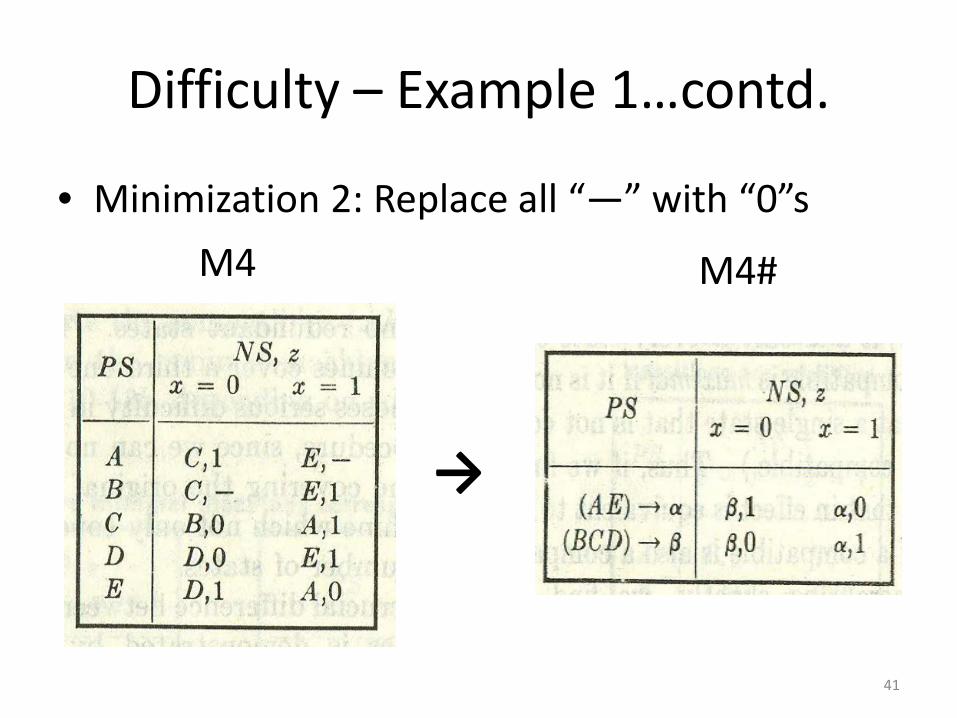
Difficulty – Example 1…contd.
• Minimization 2: Replace all “—” with “0”s
41
→
M4 M4#
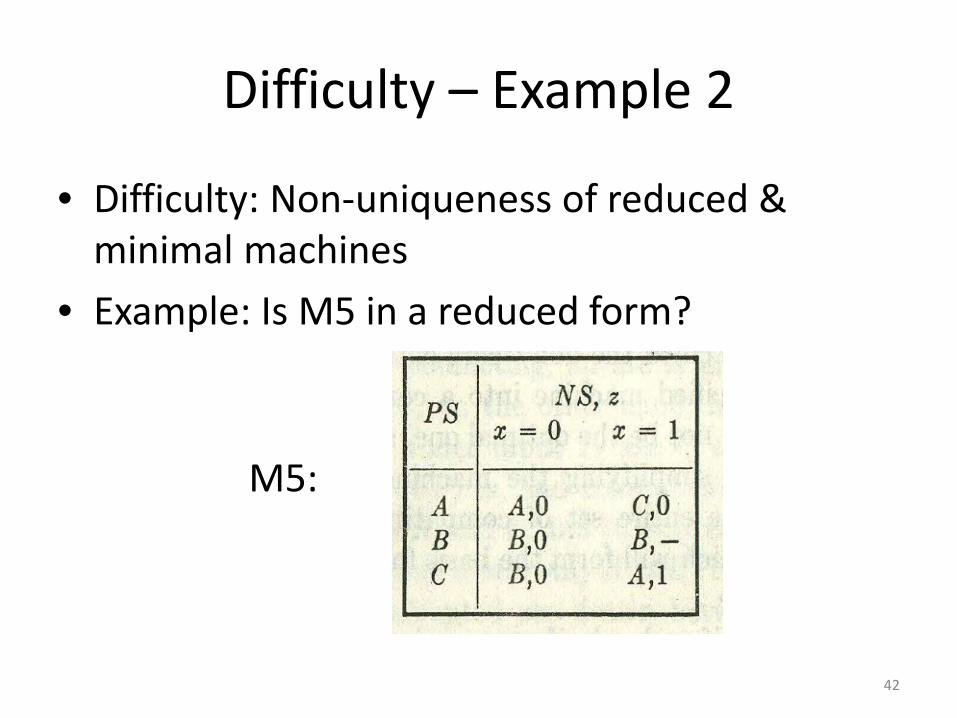
Difficulty – Example 2
• Difficulty: Non-uniqueness of reduced & minimal machines
• Example: Is M5 in a reduced form?
42
M5:
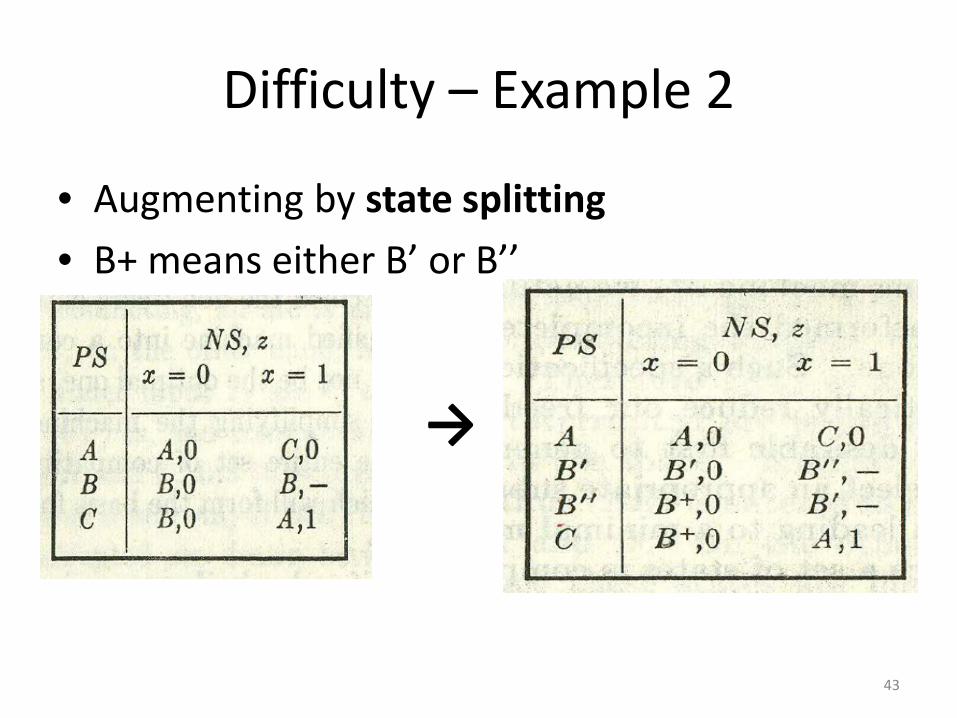
Difficulty – Example 2
• Augmenting by state splitting • B+ means either B’ or B’’
43
→
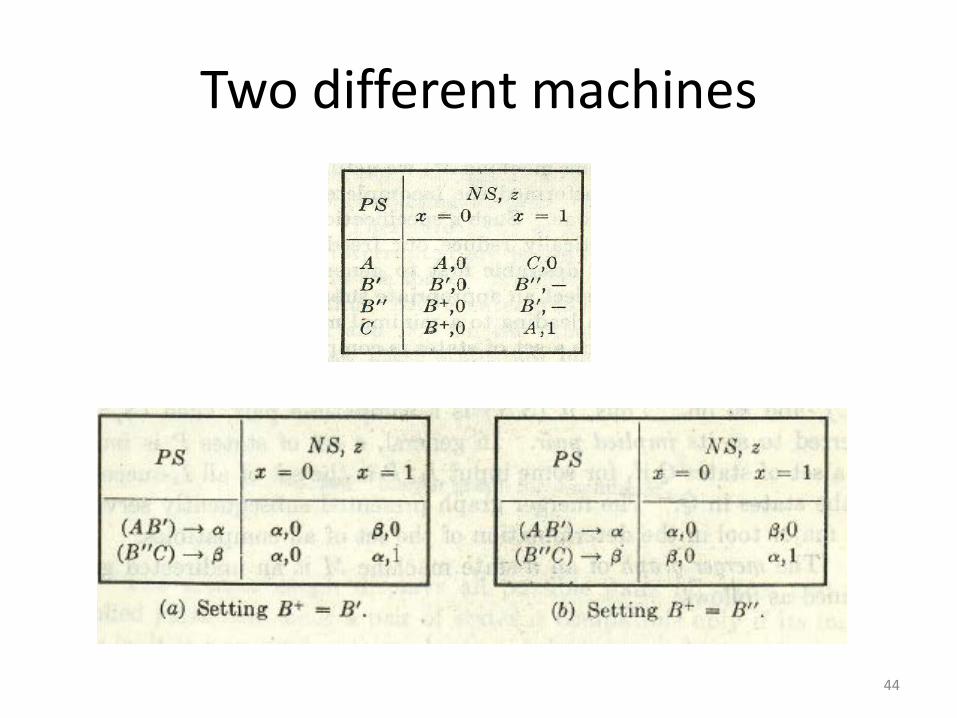
Two different machines
44
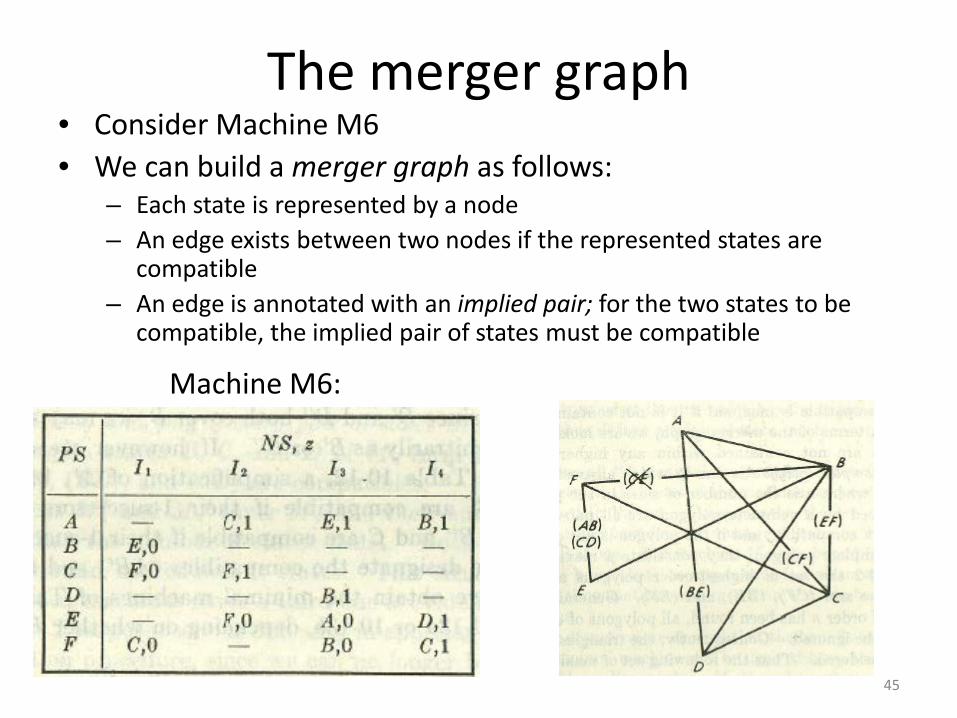
The merger graph • Consider Machine M6 • We can build a merger graph as follows:
– Each state is represented by a node – An edge exists between two nodes if the represented states are
compatible – An edge is annotated with an implied pair; for the two states to be
compatible, the implied pair of states must be compatible
45
Machine M6:
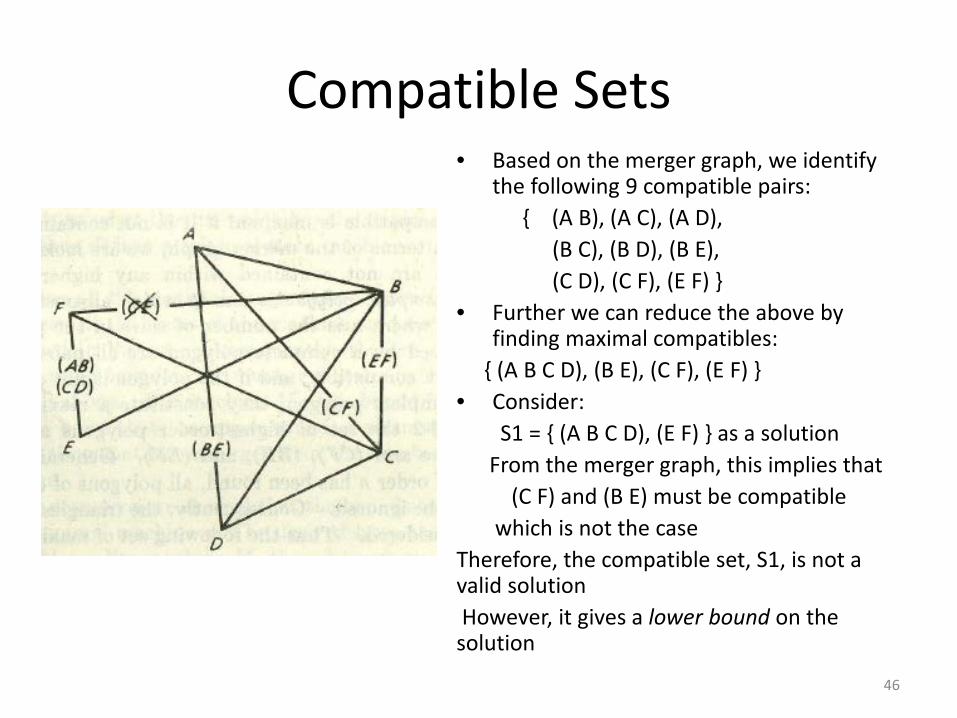
Compatible Sets • Based on the merger graph, we identify
the following 9 compatible pairs: { (A B), (A C), (A D), (B C), (B D), (B E), (C D), (C F), (E F) } • Further we can reduce the above by
finding maximal compatibles: { (A B C D), (B E), (C F), (E F) } • Consider: S1 = { (A B C D), (E F) } as a solution From the merger graph, this implies that (C F) and (B E) must be compatible which is not the case Therefore, the compatible set, S1, is not a valid solution However, it gives a lower bound on the solution
46
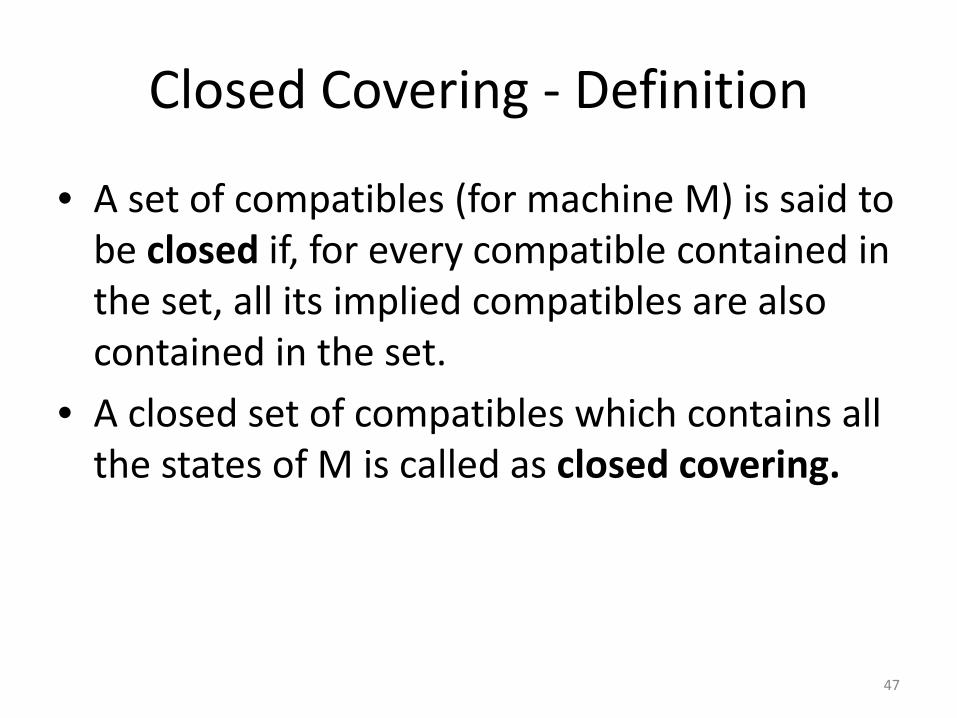
Closed Covering - Definition
• A set of compatibles (for machine M) is said to be closed if, for every compatible contained in the set, all its implied compatibles are also contained in the set.
• A closed set of compatibles which contains all the states of M is called as closed covering.
47
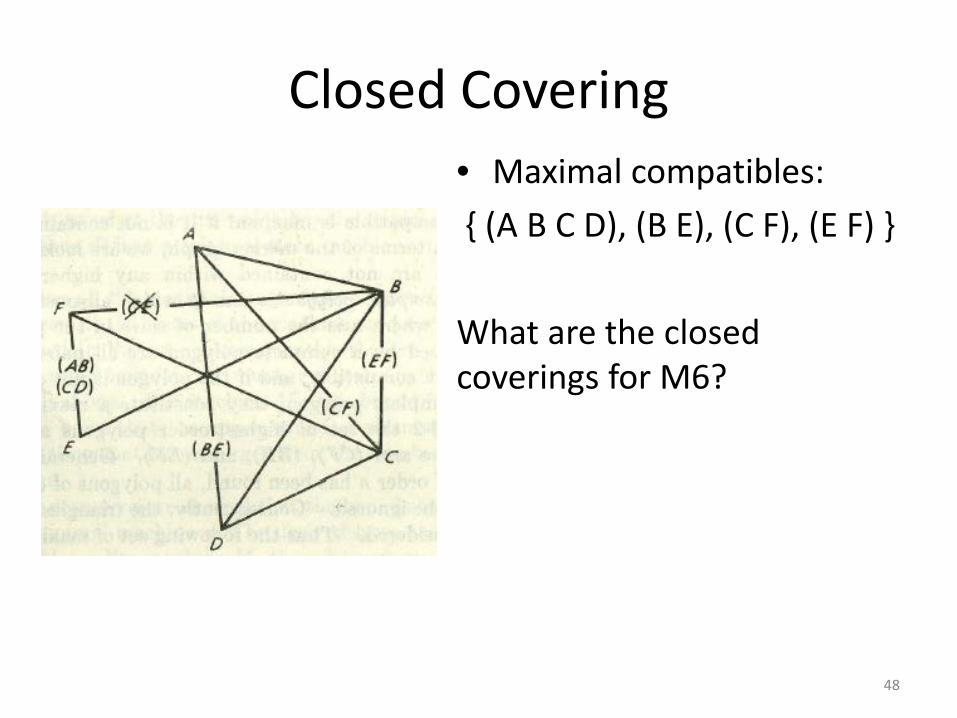
Closed Covering • Maximal compatibles: { (A B C D), (B E), (C F), (E F) } What are the closed coverings for M6?
48
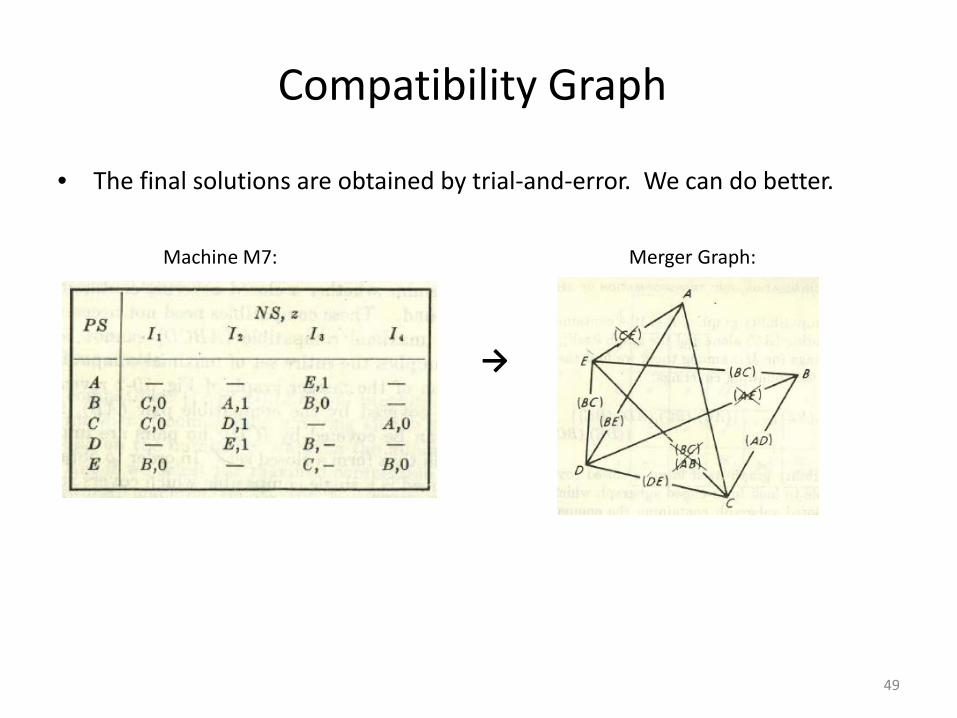
Compatibility Graph
• The final solutions are obtained by trial-and-error. We can do better.
49
Machine M7:
→
Merger Graph:
50
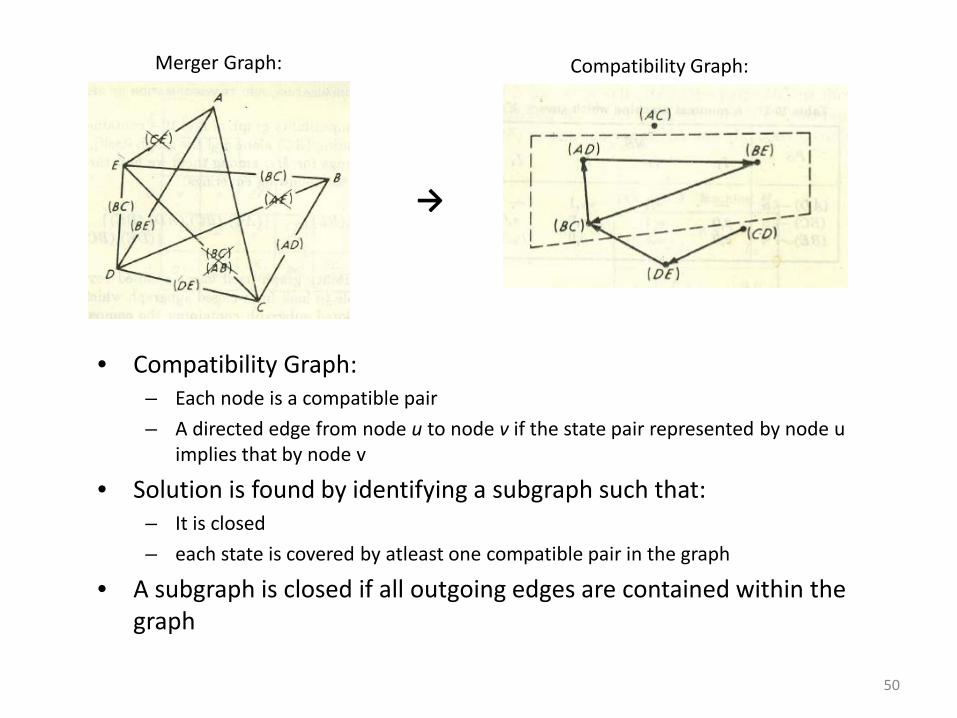
Compatibility Graph:
• Compatibility Graph: – Each node is a compatible pair – A directed edge from node u to node v if the state pair represented by node u
implies that by node v
• Solution is found by identifying a subgraph such that: – It is closed – each state is covered by atleast one compatible pair in the graph
• A subgraph is closed if all outgoing edges are contained within the graph
Merger Graph:
→
Capabilities and Limitations
• What can a machine do? • Are there any limitations on the type of input-
output transformations that can be performed by a machine?
• What restrictions are imposed on the capabilities of the m/c by the finiteness of the number of its states?
51
Limitation of FSM - Periodicity
• Let there be an n-state machine • Input: sequence of 1’s • After consuming no more than n 1’s the
machine should arrive at a visited state. Why? • From there on, the output should repeat.
Why?
52
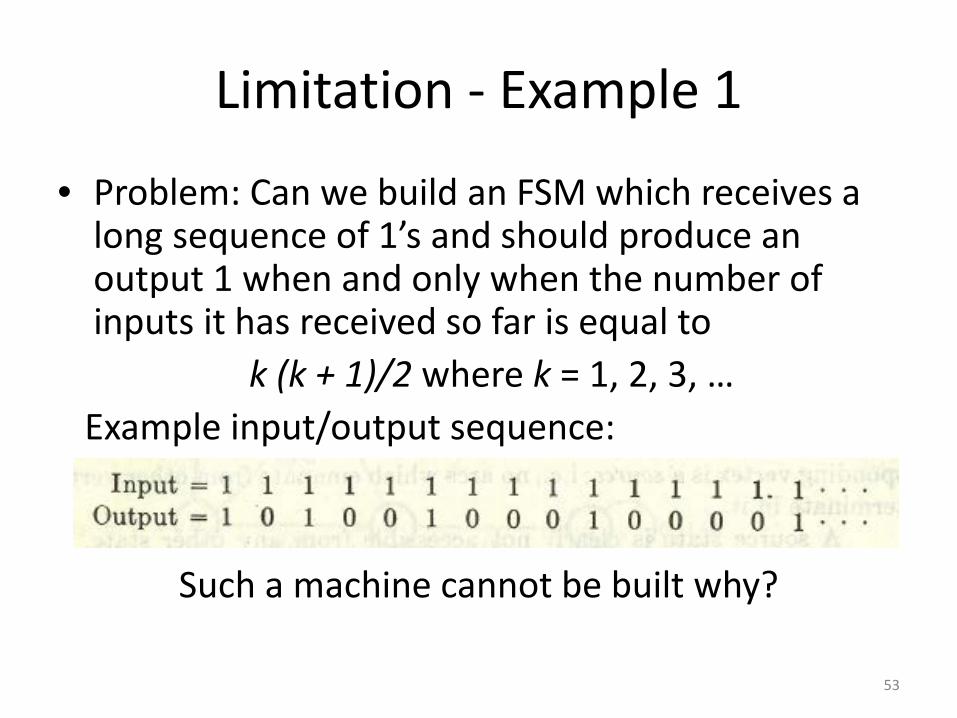
Limitation - Example 1
• Problem: Can we build an FSM which receives a long sequence of 1’s and should produce an output 1 when and only when the number of inputs it has received so far is equal to
k (k + 1)/2 where k = 1, 2, 3, … Example input/output sequence:
Such a machine cannot be built why?
53
Limitation – Example 2
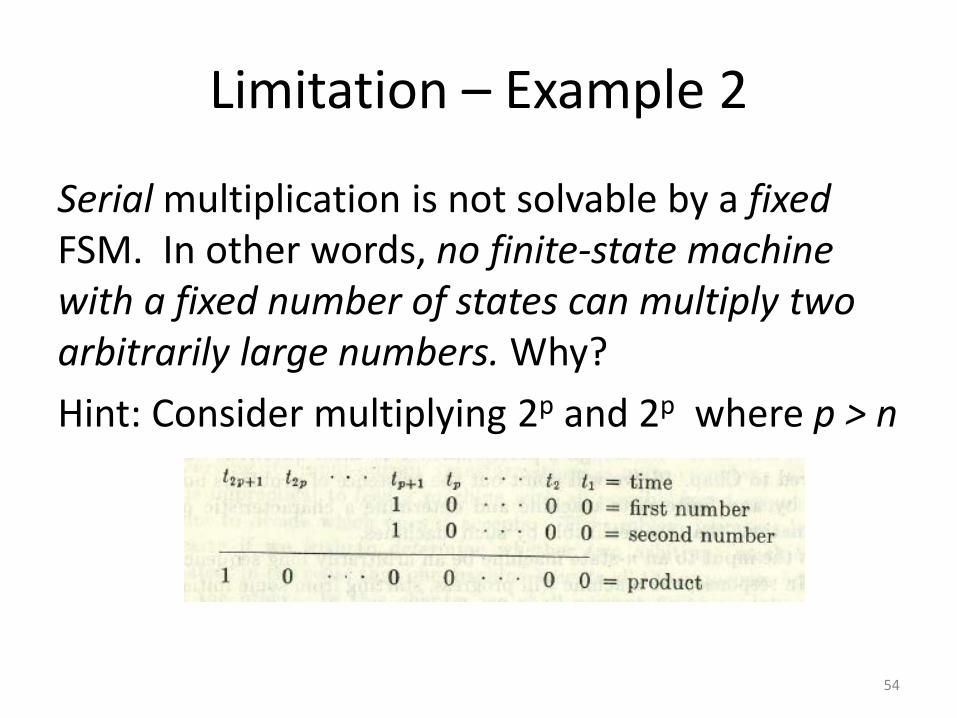
Serial multiplication is not solvable by a fixed FSM. In other words, no finite-state machine with a fixed number of states can multiply two arbitrarily large numbers. Why? Hint: Consider multiplying 2p and 2p where p > n
54