
Stabilità dei sistemi dinamici - Luigi...
54
Stabilit` a dei sistemi dinamici Luigi Glielmo Universit` a del Sannio [email protected] September 28, 2016
Transcript of Stabilità dei sistemi dinamici - Luigi...
Stabilita dei sistemi dinamici
Luigi Glielmo
Universita del Sannio
September 28, 2016
Stabilita interna
Un sistema lineare e
I asintoticamente stabile (a.s.) quando la risposta liberatende asintoticamente a zero per qualunque stato iniziale x0,cioe
limt→∞
Φ(t) x0 = 0 ∀x0
I marginalmente stabile quando non e a.s. ma comunque letraiettorie Φ(t) x0 restano limitate
I instabile negli altri casi; in altri termini esistono condizioniiniziali x0 per le quali ‖Φ(t) x0‖ → ∞ per t →∞
Da notare chea.s. ⇐⇒ lim
t→∞Φ(t) = 0
Stabilita dei modi
Spesso si utilizza la stessa terminologia per qualificare i singolimodi del sistema, e si parla di modi a.s., marginalmente stabili oinstabili, intendendo che la traiettoria goda della relativa proprietacon condizione iniziale scelta sull’opportuno autospazio.Dal momento che, in generale,
Φ(t) x0 =∑
t jeαi t [cos(ωi t) vij + sin(ωi t)wij ]
dove i vettori vij ,Wij dipendono da x0, e evidente che lecaratteristiche di stabilita di un sistema sono le stesse delsuo modo dominante, cioe dell’autovalore (o autovalori) conparte reale αi maggiore.
Stabilita e autovalori (t.c.)
Un sistema lineare t.c. e
I a.s. se e solo se il suo autovalore dominante giace a sinistradell’asse immaginario
I marginalmente stabile se e solo se il suo autovalore dominantegiace sull’asse immaginario ed e diagonalizzabile
I instabile se e solo se il suo autovalore dominante giace adestra dell’asse immaginario
Se l’autovalore dominante (supponiamolo il primo degli n) giacesull’asse immaginario (α1 = 0) e non e diagonalizzabile, allora ilmodo corrispondente avra termini non limitati del tipo
t j se ω1 = 0
t j [cos(ω1t) v1j + sin(ω1t)w1j ] se ω1 6= 0
con j ≥ 1.
Stabilita e autovalori (t.d.)
Un sistema lineare t.d. e
I a.s. se e solo se il suo autovalore dominante giace all’internodella circonferenza unitaria
I marginalmente stabile se e solo se il suo autovalore dominantegiace sulla circonferenza unitaria ed e diagonalizzabile
I instabile se e solo se il suo autovalore dominante giaceall’esterno della circonferenza unitaria
Robustezza della stabilita
Gli autovalori di una matrice dipendono con continuita daglielementi della matrice (piccole variazioni dei coefficienti ⇒ piccolevariazioni degli autovalori); quindi
Nota
Per un sistema a.s. la distanza dell’autovalore dominante dallacondizione di instabilita (l’asse immaginario o la circonferenzaunitaria) da una misura di quanto sia robusta la stabilita a frontedi variazioni dei parametri.
Stabilita e punti di equilibrio
Applicando un ingresso costante u i punti di equilibrio x sono lesoluzioni di
0 = Ax + Bu (t.c.)
x = Ax + Bu (t.d.)
L’utilita ingegneristica della stabilita e legata al seguente
Risultato
Un sistema lineare e a.s. se e solo se per ogni ingresso u esiste ununico stato di equilibrio x tale che x(t)→ x per qualunque x0
Polinomi stabili
I Polinomio di Hurwitz Un polinomio con tutte radici asinistra dell’asse immaginario
I Polinomio di Schur Un polinomio con tutte radiciall’interno della circonferenza unitaria
I Polinomio stabile Hurwitz o Schur a seconda del contesto
Test sui polinomi (Hurwitz)
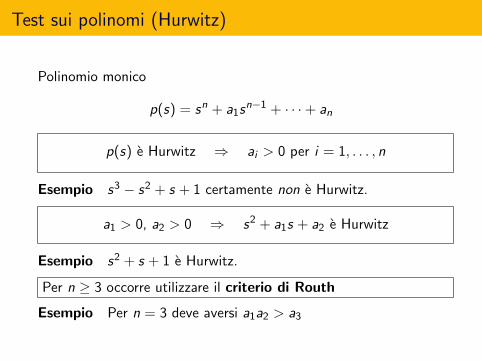
Polinomio monico
p(s) = sn + a1sn−1 + · · ·+ an
p(s) e Hurwitz ⇒ ai > 0 per i = 1, . . . , n
Esempio s3 − s2 + s + 1 certamente non e Hurwitz.
a1 > 0, a2 > 0 ⇒ s2 + a1s + a2 e Hurwitz
Esempio s2 + s + 1 e Hurwitz.
Per n ≥ 3 occorre utilizzare il criterio di Routh
Esempio Per n = 3 deve aversi a1a2 > a3
Test sui polinomi (Schur)
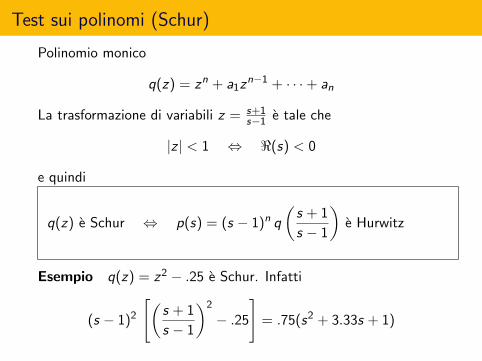
Polinomio monico
q(z) = zn + a1zn−1 + · · ·+ an
La trasformazione di variabili z = s+1s−1 e tale che
|z | < 1 ⇔ <(s) < 0
e quindi
q(z) e Schur ⇔ p(s) = (s − 1)n q
(s + 1
s − 1
)e Hurwitz
Esempio q(z) = z2 − .25 e Schur. Infatti
(s − 1)2
[(s + 1
s − 1
)2
− .25
]= .75(s2 + 3.33s + 1)
Stabilita delle interconnessioni
La cascata o il parallelo di sistemi e a.s. se e solo se sono a.s. isistemi componenti (poiche gli autovalori del sistema complessivosono gli autovalori dei sistemi componenti)Per la retroazione non possono darsi regole generali.
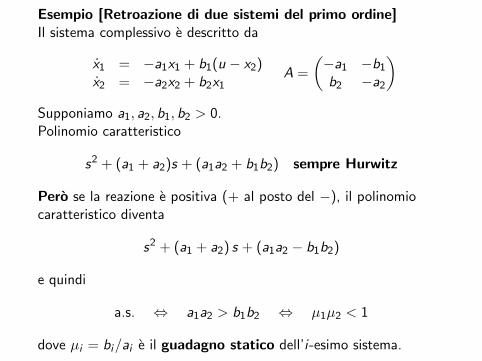
Esempio [Retroazione di due sistemi del primo ordine]Il sistema complessivo e descritto da
x1 = −a1x1 + b1(u − x2)x2 = −a2x2 + b2x1
A =
(−a1 −b1
b2 −a2
)Supponiamo a1, a2, b1, b2 > 0.Polinomio caratteristico
s2 + (a1 + a2)s + (a1a2 + b1b2) sempre Hurwitz
Pero se la reazione e positiva (+ al posto del −), il polinomiocaratteristico diventa
s2 + (a1 + a2) s + (a1a2 − b1b2)
e quindi
a.s. ⇔ a1a2 > b1b2 ⇔ µ1µ2 < 1
dove µi = bi/ai e il guadagno statico dell’i-esimo sistema.
Esempio [Retroazione con tre sistemi del primo ordine]In questo caso si puo mostrare, utilizzando il criterio di Routh, cheil sistema e a.s. se e solo se
µ < µ∗
dove
µ = µ1 µ2 µ3 (guadagno d’anello)
µ∗ = (τ1 + τ2 + τ3)(τ−11 + τ−1
2 + τ−13 )− 1
e µi = bi/ai e τi = 1/ai sono il guadagno statico e la costante ditempo dell’i-esimo sistema.
Esempio [Dinamica di un convoglio]
I Un automezzo guida (0) ed n automezzi eguali 1, . . . , n
I Velocita nominale v , distanza nominale tra i veicoli L;poniamo T = L/v
I Dinamica di ciascun veicolo
x1 = x2
x2 = u − hx2
(h coefficiente di attrito)
I Controllo decentralizzato
ui = hx2 +1
τ2(∆Li − T ∆vi )
i = 1, . . . , n; ∆Li e l’eccesso di distanza dal veicolo cheprecede; ∆vi = x2 − v (eccesso di velocita); τ costante daprogettare
Supponiamo che all’istante t = 0 il veicolo guida si blocchinell’origine e studiamo il comportamento del veicolo 1.
I x1(0) < 0, x2(0) > 0
I ∆L1 = −x1 − L per t ≥ 0 e
u1 = hx2 +1
τ2
(−x1 − L− T (x2 − v)
)I sistema a ciclo chiuso
x1 = x2
x2 = − 1
τ2x1 −
T
τ2x2
I A =
(0 1
− 1τ2 − T
τ2
)
I p(s) = s2 + Tτ2 s + 1
τ2 e Hurwitz ∀τ ⇒ il veicolo tende adarrestarsi.
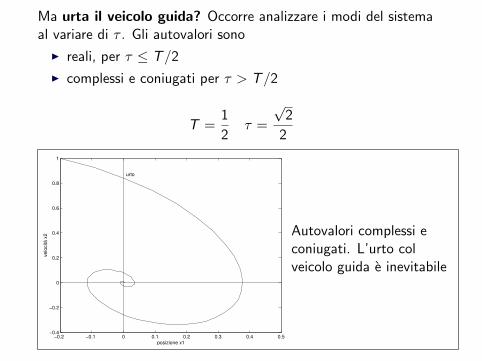
Ma urta il veicolo guida? Occorre analizzare i modi del sistemaal variare di τ . Gli autovalori sono
I reali, per τ ≤ T/2
I complessi e coniugati per τ > T/2
T =1
2τ =
√2
2
−0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
posizione x1
ve
locità
x2
urto
Autovalori complessi econiugati. L’urto colveicolo guida e inevitabile
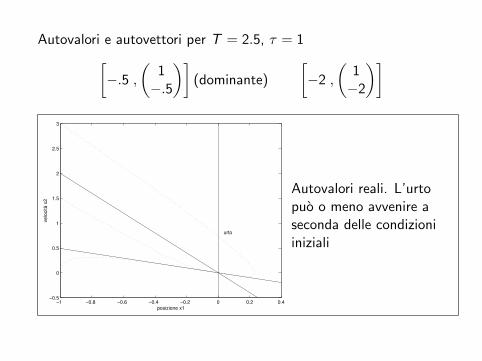
Autovalori e autovettori per T = 2.5, τ = 1[−.5 ,
(1−.5
)](dominante)
[−2 ,
(1−2
)]
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4−0.5
0
0.5
1
1.5
2
2.5
3
posizione x1
ve
locità
x2
urto
Autovalori reali. L’urtopuo o meno avvenire aseconda delle condizioniiniziali
Metodo di Liapunov
Dato il sistema scalarex = ax
analizziamo come varia la funzione quadratica V (x) = p x2
(p > 0) lungo le traiettorie del sistema.
dV (x(t))
dt= 2p x(t) x(t)
= 2p a x(t)2
Se a < 0 la derivata e sempre < 0 e il valore di V diminuisceasintoticamente ⇒ x(t)→ 0.
La stabilita secondo Liapunov
Consideriamo il sistema x = f (x) e supponiamo, senza perdita digeneralita (perche?), che l’origine sia un punto di equilibrio, cioef (0) = 0.
Definizione
Il punto di equilibrio x = 0 e
I stabile se ∀ε > 0 ∃δ > 0 tale che
‖x(0)‖ < δ ⇒ ‖x(t)‖ < ε ∀t ≥ 0
I instabile se non e stabile
I asintoticamente stabile se e stabile e inoltre esiste un R > 0tale che
‖x(0)‖ < R ⇒ limt→∞
x(t) = 0
Varie considerazioni sul concetto di stabilita
I La definizione appena vista si adatta subito anche ai sisteminon lineari t.d. xt+1 = f (xt).
I Ricordiamo che un sistema lineare e anche un sistema nonlineare, mentre il contrario non e vero in generale (sistemanon lineare e un’abbreviazione di ”sistema nonnecessariamente lineare”).
I La definizione e una generalizzazione di quella introdotta per isistemi lineari x = Ax o xt+1 = Axt . In altri termini se, adesempio, un sistema lineare e a.s. secondo la definizionespecifica per i sistemi lineari, lo e anche nell’accezionegenerale appena introdotta. Viceversa, se un sistema lineare ea.s. nell’accezione generale, lo e anche in quella specifica deisistemi lineari.
Attenzione: stabilita del punto di equilibrio!
Per un sistema non lineare occorre in generale parlare di stabilita(o instabilita) di un suo punto di equilibrio mentre per un sistemalineare si puo parlare di stabilita del sistema (perche?).Cio tra l’altro serve a rimarcare che puo accadere che un certopunto di equilibrio di un sistema abbia una certa proprieta distabilita, e un altro punto di equilibrio dello stesso sistema ne abbiaun’altra.
Il metodo diretto di Liapunov
In generale e difficile accertare le caratteristiche di stabilita di (unpunto di equilibrio di) un sistema non lineare poiche, secondo ladefinizione occorre lavorare sulla soluzione dell’equazione e, si sa,solo per i sistemi lineari e per certe forme di equazioni non lineariesistono soluzioni in forma chiusa. E evidente inoltre che ilproblema aumenta di complessita con l’ordine del sistema, occorrestudiare l’andamento di n variabili.L’idea geniale di Liapunov e stata di riassumere il comportamentodi n variabili di stato attraverso una funzione scalare, unacosiddetta funzione di energia, sempre positiva tranne che nelpunto di equilibrio. Se si riesce a dimostrare che questa funzionescalare tende a zero lungo le traiettorie del sistema, allora si puoconcludere che anche le n variabili di stato tendono a zero, l’unicopunto in cui la funzione di energia si annulla.
La derivata lungo una traiettoria di un sistema
Data una funzione derivabile V : D → R con D ⊆ Rn contenentel’origine e il sistema x = f (x) e facile
I calcolare la derivata lungo le traiettorie del sistema:
d
dtV (x(t)) =
∑i
∂V
∂xixi (t)
=∂V
∂x(x(t)) f (x(t))
utilizzando la notazionevettoriale e il gradienteche e un vettore riga
I notare che se la traiettoria passa in un generico punto x la
derivata in quel punto vale ∂V∂x (x)f (x) e non occorre
calcolare la traiettoria
La derivata di Liapunov
Definiamo V (x) ,∂V
∂x(x)f (x) e notiamo che si tratta di uno
scalare ottenuto dal prodotto di un vettore riga (il gradiente) perun vettore colonna (il secondo membro dell’equazionedifferenziale).Inoltre, anche se il punto sopra la V richiama la derivata rispettoal tempo si noti che il tempo non appare, e del tutto scomparso!
Funzioni definite in segno
Una funzione V : D → R si dice
I semidefinita positiva se V (x) ≥ 0 in D
I definita positiva se V (x) > 0 in D\0 e V (0) = 0
I semidefinita negativa se −V e s.d.p
I definita negativa se −V e d.p.
Talvolta si abbrevia scrivendo V (x) ≥ 0 per s.d.p., V (x) > 0 perd.p., e cosı via. . .
Il (secondo) metodo di Liapunov
Liapunov
Sia V > 0 in D ⊆ Rn. Allora, il punto di equilibrio x = 0 e
I stabile se V ≤ 0
I a.s. se V < 0
Barbashin-Krasovskii
Se V > 0 in Rn, V < 0 e inoltre
lim‖x‖→∞
V (x) =∞ (cioe V e radialmente illimitata)
il punto di equilibrio x = 0 e globalmente a.s., cioe la regione diasintotica stabilita e tutto lo spazio di stato.
Un importante caveat
E una condizione sufficiente!
Se non riesco a trovare una funzione di Liapunov non possoconcludere che il sistema e instabile!
Esempi
Per il sistema scalare x = −g(x), con g(0) = 0 e xg(x) > 0 perx 6= 0 e facile verificare che una f.d.L. e
V (x) =
∫ x
0g(y) dy
Il pendolo
x1 = x2
x2 = −a sin x1 − bx2
con a, b > 0. L’energia del pendolo e data da
E (x) =
∫ x1
0a sin y dy +
1
2x2
2
= a (1− cos x1) +1
2x2
2
e dunque
E (x) = a sin x1(x2) + x2(−a sin x1 − bx2)
= −bx22 ≤ 0 (cioe semidefinita negativa)
Dunque il pendolo e ”solo” stabile?!
Per b = 0 il pendolo non ha attrito e si ottiene E (x) ≡ 0, cioequalunque sia x , E (x) = 0. Cio implica che anche lungo letraiettorie del sistema si abbia
E (x(t)) ≡ 0 ⇒ E (x(t)) ≡ cost
cioe lungo le traiettorie l’energia del pendolo si mantiene costante.Viceversa, le traiettorie del sistema sono date dalle curve di livellodella funzione di energia.
Il Metodo di Liapunov per i sistemi lineari
Per il sistema vettorialex = Ax
consideriamo la forma quadratica (funzione di Liapunov ofunzione di energia)
V (x) = xTPx (P simmetrica e > 0)
Allora
dV (x(t))
dt= x(t)TPx(t) + x(t)TPx(t)
= x(t)T (PA + ATP)x(t)
In altri termini
Pderivazione−→ PA + ATP
La stabilita asintotica e assicurata se
PA + ATP < 0
Equazione e disequazionedi Liapunov
La relazionePA + ATP < 0
e una diseguaglianza lineare matriciale (Linear Matrix Inequality,LMI) nella incognita P > 0. Se, data la A, si trova unasoluzione P, allora A e a.s. L’LMI Toolbox puo efficacementedeterminare una soluzione o stabilire che non esiste.Il soddisfacimento della suddetta LMI e equivalente alsoddisfacimento della equazione algebrica di Liapunov (lineare!)
PA + ATP = −Q con Q simmetrica e > 0
La matrice A e a.s. se e solo se per qualunque Q > 0l’equazione algebrica di Liapunov ammette una soluzioneP > 0.
Esempio: una funzione che non funziona
Il sistema x = Ax A =
(−1 30 −1
)e a.s., ma la funzione
quadratica
V1(x) = x21 + x2
2 P1 =
(1 00 1
)non e una funzione di Liapunov poiche
P1A + ATP1 = −(
2 −3−3 2
)non e definita negativa.
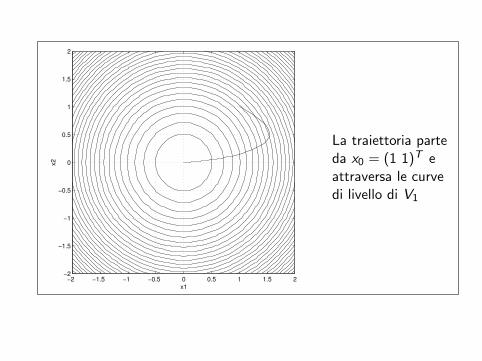
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
La traiettoria parteda x0 = (1 1)T eattraversa le curvedi livello di V1
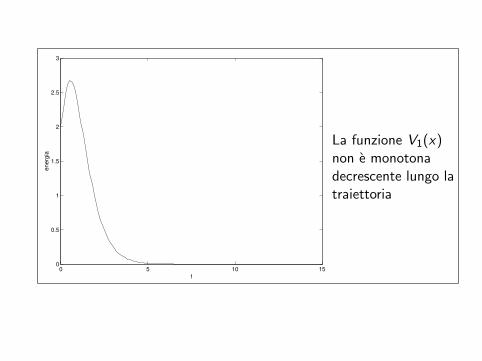
0 5 10 150
0.5
1
1.5
2
2.5
3
t
energ
ia
La funzione V1(x)non e monotonadecrescente lungo latraiettoria
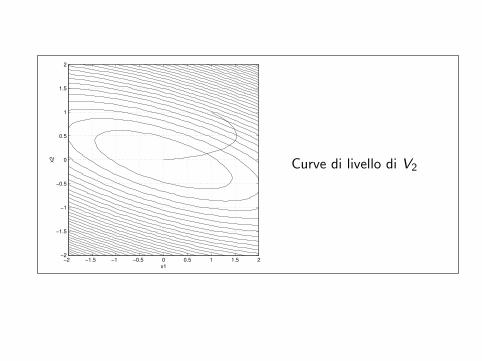
Esempio: una funzione che funziona
Invece la matrice P2 =
(.5 .75.75 2.75
)definisce una funzione di
Liapunov poiche risolve
P2A + ATP2 = −(
1 00 1
)
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
Curve di livello di V2
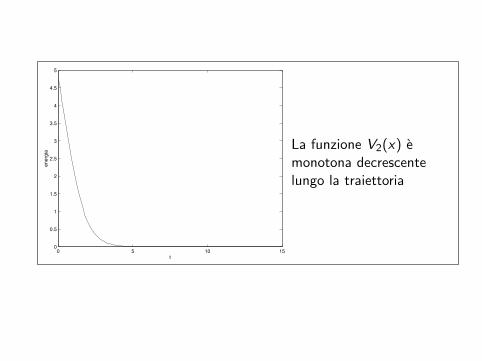
0 5 10 150
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
t
en
erg
ia
La funzione V2(x) emonotona decrescentelungo la traiettoria
Insiemi invarianti
Un insieme G e invariante per un sistema dinamico se ognitaiettoria che parte da G permane in G .
Teorema di La Salle
Sia V una f.d.L. candidata. Sia Ωs la regione, supposta limitata,dove V (x) < s e V ≤ 0. Sia S l’insieme dei punti in Ωs doveV (x) = 0 e sia G il piu grande insieme invariante in S . Allora tuttele traiettorie in Ωs tendono asintoticamente a G .
Metodo di Liapunov t.d.
E dato il sistema t.d. xt+1 = f (xt) . Partiamo sempre da una
funzione V (x) > 0 ma invece delle derivata di Liapunovcostruiamo la differenza di Liapunov. Prima calcoliamo ladifferenza lungo una traiettoria e cioe
V (xt+1)− V (xt) = V (f (xt))− V (xt)
e constatiamo che non occorre calcolare la traiettoria del sistemat.d., ma basta utilizzare il secondo membro dell’equazione alledifferenze. Inoltre, a guardar bene, la differenza dipende dal puntoin cui si calcola e non dal tempo; quindi possiamo definire
∆V (x) , V (f (x))− V (x).
Il metodo di Liapunov si applica dunque ai sistemi t.d.semplicemente sostituendo ∆V a V .
Metodo di Liapunov t.d. per sistemi lineari
Sistema t.d. x(t + 1) = Ax(t)Funzione d’energia V (x) = xTPxVariazione di energia dopo un passo
V (x(t + 1))− V (x(t)) = V (Ax(t))− V (x(t))
= x(t)T (ATPA− P)x(t)
Il sistema t.d. e a.s. se esiste P tale che
P > 0
ATPA− P < 0
Il sistema t.d. e a.s. se e solo se per ogni Q > 0 esisteun’unica P > 0 tale che
ATPA− P = −Q
Stabilita e linearizzazione
Sistema non lineare
x = f (x) f (0) = 0
Linearizzazione
x = Ax A =∂f
∂x(0)
Se A e a.s., il sistema non lineare e a.s. intorno al puntodi equilibrio 0
Risolviamo l’equazione (sappiamo che si puo fare perche A e a.s.!)
PA + ATP = −I
e usiamo la funzione di Liapunov V (x) = xTPx lungo le traiettoriedel sistema non lineare (ricordiamo che f (x) = Ax + o(‖x‖) cono(‖x‖) infinitesimi di ordine superiore al primo):
dV (x(t))
dt= xTP f (x) + f (x)TP x
= xT (PA + ATP)x + 2xTP o(‖x‖)= −‖x‖2 + 2xTP o(‖x‖)< 0 intorno all’origine
poiche intorno all’origine l’infinitesimo del secondo ordine (−‖x‖2)“batte” quello del terzo (2xTP o(‖x‖)).
Esempio [Il pendolo]
Il sistema non lineare con ingresso nullo
x1 = x2
x2 = − sin x1 − x2
La matrice del sistema linearizzato
A =
(0 1−1 −1
)e a.s. ⇒ il pendolo e localmente a.s.
La matrice di Liapunov P =
(2.4 .5.5 1
)> 0 “funziona” per il
sistema linearizzato poiche
PA + ATP < 0
ma, lontano dall’origine non funziona per il sistema originario.
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
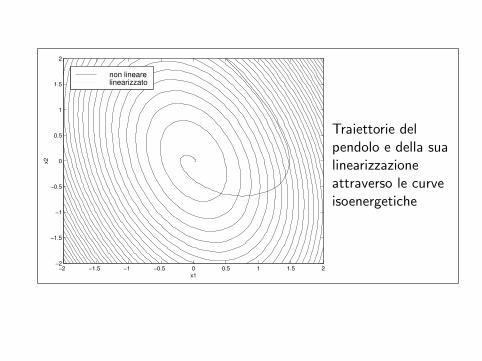
non lineare
linearizzato
Traiettorie delpendolo e della sualinearizzazioneattraverso le curveisoenergetiche
0 2 4 6 8 10 120
1
2
3
4
5
6
t
energ
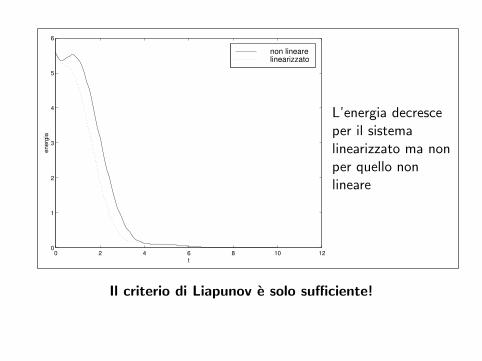
ianon lineare linearizzato
L’energia decresceper il sistemalinearizzato ma nonper quello nonlineare
Il criterio di Liapunov e solo sufficiente!
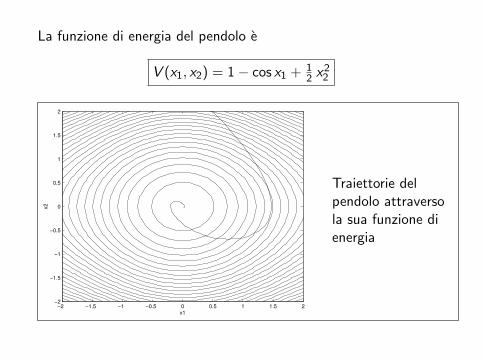
La funzione di energia del pendolo e
V (x1, x2) = 1− cos x1 + 12 x
22
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
Traiettorie delpendolo attraversola sua funzione dienergia
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
t
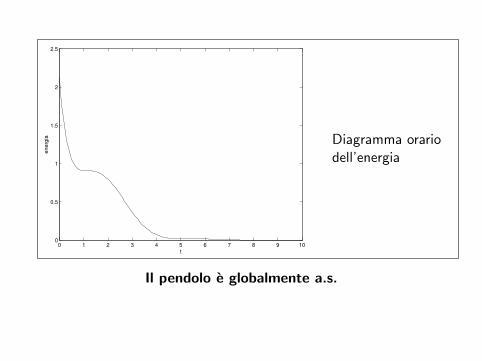
energ
ia Diagramma orariodell’energia
Il pendolo e globalmente a.s.
Stabilita di sistemi meccanici
Una classe generale di sistemi meccanici
Mq + Cq + Kq = 0
I q ∈ RN coordinate generalizzate
I MT = M > 0 matrice d’inerzia;energia cinetica = 1
2 qTMq
I K matrice di rigidezza. Sia KT = K > 0;energia potenziale = 1
2 qTKq
I C matrice di smorzamento
In forma di stato
x =
)A =
(0 I
−M−1K −M−1C
)
Energia totale
V (x) =1
2qTKq +
1
2qTMq
= xTPx con P = 12
(K 00 M
)Dalla derivazione otteniamo
PA + ATP = −(
0 00 C
)e dunque
CT = C ≥ 0 ⇐⇒ PA + ATP ≤ 0
(e una condizione piu debole di PA + ATP < 0
K > 0 e C ≥ 0 implicano stabilita marginale
Un’altra funzione di Liapunov
SupponiamoKT = K > 0 CT = C > 0
e prendiamo
P =1
2
(K + εC εMεM M
)=
1
2
(K 00 M
)+ε
2
(C MM 0
)
I P > 0 per ε > 0 sufficientemente piccolo
Ora
PA + ATP = −(εK 00 C − εM
)< 0
per ε sufficientemente piccolo.Dunque
K > 0 e C > 0 implicano a.s.
Il metodo delle simulazioni
Il sistema e a.s. se tutte le n traiettorie ottenute a partire daaltrettante condizioni iniziali linearmente indipendenti (ad esempio,ei , per i = 1, . . . , n) tendono a zero.In effetti se la condizione iniziale viene scelta a caso e lacorrispondente traiettoria tende a zero, il sistema e a.s. conprobabilita 1. (Infatti in tal caso con probabilita 0 il sistemapossiede un modo instabile che non e stato eccitato.)
Stabilita esterna
Si riferisce alla definizione esterna dei sistemi e quindi alla solarelazione ingresso-uscita.
Un sistema lineare (A,B,C ,D) e esternamentestabile (o stabile BIBO, Bounded-Input Bounded-Output) se, con condizioni iniziali nulle,
u limitato ⇒ y limitato
I Non c’e perdita di generalita perche se il sistema eraggiungibile puo essere posizionato in qualunque stato conun ingresso limitato in un tempo limitato
I Non puo portare in conto l’effetto di ingressi parassitici (ma lofa la stabilita interna)
Il sistema (A,B,C ,D) e stabile BIBO se e solo se∫ ∞0‖W (t)‖ dt <∞ (t.c.)
∞∑t=0
‖W (t)‖ <∞ (t.d.)
La stabilita interna implica quellaesterna—sostanzialmente perche l’uscita eun’integrale (o sommatoria) di risposte impulsive
Viceversa la stabilita esterna implica la stabilitainterna della parte raggiungibile-osservabile delsistema


















