Simple stresses in machine parts
28
Contents 1 Notations 2 2 Load (P ) 3 3 Stress (σ) 3 4 Strain () 3 5 Tensile Stress (σ t ) and Strain ( t ) 3 6 Compressive Stress (σ c ) and Strain ( c ) 3 7 Young’s Modulus or Modulus of Elasticity (E) 4 8 Shear Stress (τ ) and Strain 4 9 Shear Modulus or Modulus of Rigidity (G) 5 10 Bearing Stress (σ b ) 5 11 Stress-strain Diagram 6 12 Working Stress 6 13 Factor of Safety 7 14 Selection of Factor of Safety 7 15 Stresses in Composite Bars 8 16 Stresses due to Change in Temperature (Thermal Stresses) (σ th ) 9 17 Linear and Lateral Strain 9 18 Poisson’s Ratio (μ) 9 19 Volumetric Strain ( v ) 10 20 Bulk Modulus (K) 10 21 Relation Between Bulk Modulus (K) and Youngs Modulus (E) 10 22 Relation Between Youngs Modulus (E) and Modulus of Rigidity (G) 10 23 Impact Stress (σ i ) 10 24 Resilience (U ) 11 25 Examples 11 25.1 Stress and Strain ........................................................ 11 25.2 Shear Modulus or Modulus of Rigidity ............................................ 14 25.3 Bearing Stress .......................................................... 15 25.4 Stress-strain Diagram ..................................................... 16 25.5 Stresses in Composite Bars .................................................. 18 25.6 Stresses due to Change in Temperature (Thermal Stresses) ................................ 21 25.7 Volumetric Strain ........................................................ 25 25.8 Impact Stress .......................................................... 26 25.9 Resilience ............................................................ 27 26 References 28 27 Contacts 28
-
Upload
mohamed-mohamed-el-sayed -
Category
Education
-
view
93 -
download
2
Transcript of Simple stresses in machine parts

Contents
1 Notations 2
2 Load (P ) 3
3 Stress (σ) 3
4 Strain (ε) 3
5 Tensile Stress (σt) and Strain (εt) 3
6 Compressive Stress (σc) and Strain (εc) 3
7 Young’s Modulus or Modulus of Elasticity (E) 4
8 Shear Stress (τ) and Strain 4
9 Shear Modulus or Modulus of Rigidity (G) 5
10 Bearing Stress (σb) 5
11 Stress-strain Diagram 6
12 Working Stress 6
13 Factor of Safety 7
14 Selection of Factor of Safety 7
15 Stresses in Composite Bars 8
16 Stresses due to Change in Temperature (Thermal Stresses) (σth) 9
17 Linear and Lateral Strain 9
18 Poisson’s Ratio (µ) 9
19 Volumetric Strain (εv) 10
20 Bulk Modulus (K) 10
21 Relation Between Bulk Modulus (K) and Youngs Modulus (E) 10
22 Relation Between Youngs Modulus (E) and Modulus of Rigidity (G) 10
23 Impact Stress (σi) 10
24 Resilience (U) 11
25 Examples 1125.1 Stress and Strain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1125.2 Shear Modulus or Modulus of Rigidity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1425.3 Bearing Stress . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1525.4 Stress-strain Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1625.5 Stresses in Composite Bars . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1825.6 Stresses due to Change in Temperature (Thermal Stresses) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2125.7 Volumetric Strain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2525.8 Impact Stress . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2625.9 Resilience . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
26 References 28
27 Contacts 28

1 Notations
• σ = Stress.
• P = Force or load acting on a body.
• A = Cross-sectional area of the body.
• ε = Strain.
• δl = Change in length of the body.
• l = Original length of the body.
• (σt) =Tensile stress.
• (εt) = Tensile strain.
• (σc) =Compressive stress.
• (εc) = Compressive strain.
• E = Young’s modulus or modulus of elasticity.
• τ = Shear stress.
• Φ = Shear strain.
• G = shear modulus or modulus of rigidity.
• d = Diameter of the rivet.
• t = Thickness of the plate.
• d.t = Projected area of the rivet.
• n = Number of rivets per pitch length in bearing or crushing.
• Pb = Average bearing pressure.
• a = Cross-sectional area at the neck.
• L = Length of specimen after fracture or final length.
• t = Rise or fall of temperature.
• α = Coefficient of thermal expansion.
• σth = Thermal stress.
• µ or 1/m = Poisson’s ratio.
• εv = Volumetric strain.
• δV = Change in volume.
• V = Original volume.
• K = Bulk modulus
• σi = Stress induced in the bar due to the application of impact load.
• h = Height through which the load falls.
• U = Resilience.

2 Load (P )
It is defined as any external force acting upon a machine part.The following four types of the load are importantfrom the subject point of view:
1. Dead or steady load. A load is said to be a dead or steady load, when it does not change in magnitudeor direction.
2. Live or variable load. A load is said to be a live or variable load, when it changes continually.
3. Suddenly applied or shock loads. A load is said to be a suddenly applied or shock load, when it issuddenly applied or removed.
4. Impact load. A load is said to be an impact load, when it is applied with some initial velocity.
Note: A machine part resists a dead load more easily than a live load and a live load more easily than a shockload.
3 Stress (σ)
When some external system of forces or loads act on a body, the internal forces (equal and opposite) are set upat various sections of the body, which resist the external forces. This internal force per unit area at any sectionof the body is known as unit stress or simply a stress.
σ =P
A
4 Strain (ε)
When a system of forces or loads act on a body, it undergoes some deformation. This deformation per unitlength is known as unit strain or simply a strain.
ε =δl
l
5 Tensile Stress (σt) and Strain (εt)
Tensile stress (σt) = PA
Tensile strain (εt) = δll
Figure 1: Tensile stress and strain.
6 Compressive Stress (σc) and Strain (εc)
Compressive stress (σc) = PA
Compressive strain (εc) = δll
Figure 2: Compressive stress and strain.

7 Young’s Modulus or Modulus of Elasticity (E)
Hooke’s law states that when a material is loaded within elastic limit, the stress is directly proportional tostrain,
σ ∝ εσ = E ε
E =σ
ε=
P l
A δl
8 Shear Stress (τ) and Strain
When a body is subjected to two equal and opposite forces acting tangentially across the resisting section, as aresult of which the body tends to shear off the section, then the stress induced is called shear stress.
Shear stress (τ) =Tangential force
Resisting area
τ =P
A
Figure 3: Single shearing of a riveted joint.
Figure 4: Double shearing of a riveted joint.

9 Shear Modulus or Modulus of Rigidity (G)
It has been found experimentally that within the elastic limit, the shear stress is directly proportional to shearstrain.
τ ∝ Φτ = G Φ
10 Bearing Stress (σb)
A localized compressive stress at the surface of contact between two members of a machine part, that arerelatively at rest is known as bearing stress or crushing stress. The bearing stress is taken into account inthe design of riveted joints, cotter joints, knuckle joints, etc.
σb (or σc) =P
dtn
Figure 5: Bearing stress in a riveted joint.
It may be noted that the local compression which exists at the surface of contact between two members of amachine part that are in relative motion, is called bearing pressure (not the bearing stress). This term iscommonly used in the design of a journal supported in a bearing, pins for levers, crank pins, clutch lining, etc.
Pb =P
ld
Figure 6: Bearing pressure in a journal supported in a bearing.

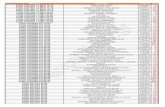
11 Stress-strain Diagram
The various properties of the material are discussed below :
1. 1.Proportional limit. We see from the diagramthat from point O to A is a straight line, which rep-resents that the stress is proportional to strain. Be-yond point A, the curve slightly deviates from thestraight line. It is thus obvious, that Hooke’s lawholds good up to point A and it is known as pro-portional limit.
2. Elastic limit. It may be noted that even if the loadis increased beyond point A upto the point B, thematerial will regain its shape and size when the loadis removed. This means that the material has elasticproperties up to the point B. This point is known aselastic limit. It is defined as the stress developedin the material without any permanent set.Note: Since the above two limits are very close toeach other, therefore, for all practical purposes theseare taken to be equal.
Figure 7: Stress-strain diagram for a mild steel.
3. Yield point. If the material is stressed beyond point B, the plastic stage will reach i.e. on the removalof the load, the material will not be able to recover its original size and shape. The points C and D arecalled the upper and lower yield points respectively. The stress corresponding to yield point is knownas yield point stress.
4. Ultimate stress. At D,the specimen regains some strength and higher values of stresses are requiredfor higher strains, than those between A and D. The stress (or load) goes on increasing till the point Eis reached. The gradual increase in the strain (or length) of the specimen is followed with the uniformreduction of its cross-sectional area. The work done, during stretching the specimen, is transformed largelyinto heat and the specimen becomes hot. At E, the stress, which attains its maximum value is known asultimate stress.
5. Breaking stress. After the specimen has reached the ultimate stress, a neck is formed, which decreasesthe cross-sectional area of the specimen. A little consideration will show that the stress (or load) necessaryto break away the specimen, is less than the maximum stress. The stress is, therefore, reduced until thespecimen breaks away at point F.The stress corresponding to point F is known as breaking stress.Note: The breaking stress (i.e. stress at F which is less than at E) appears to be somewhat misleading.As the formation of a neck takes place at E which reduces the cross-sectional area, it causes the specimensuddenly to fail at F. If for each value of the strain between E and F, the tensile load is divided by thereduced cross-sectional area at the narrowest part of the neck, then the true stress-strain curve will followthe dotted line EG. However, it is an established practice, to calculate strains on the basis of originalcross-sectional area of the specimen.
6. Percentage reduction in area.
Reduction in area = Aa
Percentage reduction in area =A− aA
x 100
7. Percentage elongation.
Elongation = L− l
Percentage elongation =L− lL
x 100
12 Working Stress
When designing machine parts, it is desirable to keep the stress lower than the maximum or ultimate stress atwhich failure of the material takes place. This stress is known as the working stress or design stress. It isalso known as safe or allowable stress.Note: By failure it is not meant actual breaking of the material. Some machine parts are said to fail whenthey have plastic deformation set in them, and they no more perform their function satisfactory.

13 Factor of Safety
It is defined, in general, as the ratio of the maximum stress to the working stress. Mathematically,
Factor of safety =Maximum stress
Working or designstress
In case of ductile materials e.g. mild steel, where the yield point is clearly defined, the factor of safety is basedupon the yield point stress. In such cases,
Factor of safety =Yield point stress
Working or designstress
In case of brittle materials e.g. cast iron, the yield point is not well defined as for ductile mate-rials. Therefore,the factor of safety for brittle materials is based on ultimate stress.
Factor of safety =Ultimate stress
Working or designstress
This relation may also be used for ductile materials.Note: The above relations for factor of safety are for static loading.
14 Selection of Factor of Safety
Before selecting a proper factor of safety, a design engineer should consider the following points :
1. The reliability of the properties of the material and change of these properties during service ;
2. The reliability of test results and accuracy of application of these results to actual machine parts ;
3. The reliability of applied load ;
4. The certainty as to exact mode of failure ;
5. The extent of simplifying assumptions ;
6. The extent of localized stresses ;
7. The extent of initial stresses set up during manufacture ;
8. The extent of loss of life if failure occurs ; and
9. The extent of loss of property if failure occurs.

15 Stresses in Composite Bars
A composite bar may be defined as a bar made up of two or more different materials, joined together, in sucha manner that the system extends or contracts as one unit, equally, when subjected to tension or compression.In case of composite bars, the following points should be kept in view:
1. The extension or contraction of the bar being equal, the strain i.e. deformation per unit length is alsoequal.
2. The total external load on the bar is equal to the sum of the loads carried by different materials.
P = P1 + P2
σ1 =P1
A1
ε =σ1E1
=P1
A1E1
δl1 =P1l
A1E1
δl2 =P2l
A2E2
δ1 = δ2P1l
A1E1
=P2l
A2E2
⇒ P1 = P2A1E1
A2E2
P = P1 + P2 = P2A1E1
A2E2
+ P2 = P2
(A1E1
A2E2
+ 1
)=A1E1 + A2E2
A2E2
P2 = PA2E2
A1E1 + A2E2
P1 = PA1E1
A1E1 + A2E2
P1l
A1E1
=P2l
A2E2σ1E1
=σ1E1
σ1 =E1
E2
σ2
σ2 =E2
E1
σ1
P = P1 + P2 = σ1A1 + σ2A2
Note: The ratio E1/E2 is known as modular ratio of the two materials.
Figure 8: Stresses in composite bars.

16 Stresses due to Change in Temperature (Thermal Stresses) (σth)
Whenever there is some increase or decrease in the temperature of a body, it causes the body to expand orcontract. A little consideration will show that if the body is allowed to expand or contract freely, with the riseor fall of the temperature, no stresses are induced in the body. But, if the deformation of the body is prevented,some stresses are induced in the body. Such stresses are known as thermal stresses.Increase or decrease in length,
δl = lαt
If the ends of the body are fixed to rigid supports, so that its expansion is prevented, then compressive straininduced in the body,
εc =δ
l
lαt
l= αtl
Thermal stress,σth = εcE = αtE
Notes:
1. When a body is composed of two or different materials having different coefficient of thermal expansions,then due to the rise in temperature, the material with higher coefficient of thermal expansion will besubjected to compressive stress whereas the material with low coefficient of expansion will be subjected totensile stress.
2. When a thin tyre is shrunk on to a wheel of diameter D, its internal diameter dis a little less than thewheel diameter. When the tyre is heated, its circumference πd will increase to πD. In this condition, it isslipped on to the wheel. When it cools, it wants to return to its original circumference πd, but the wheelif it is assumed to be rigid, prevents it from doing so.
Strain, ε =πD − πd
πd=D − dd
This strain is known as circumferential or hoop strain.Circumferential or hoop stress,
σ = Eε =E(D − d)
d
17 Linear and Lateral Strain
It is thus obvious, that every direct stress is accompanied by a strain in its own direction which is known aslinear strain and an opposite kind of strain in every direction, at right angles to it, is known as lateralstrain.
Figure 9: Linear and lateral strain.
18 Poisson’s Ratio (µ)
µ =Lateral strain
Linear strain

19 Volumetric Strain (εv)
εv =δV
V
Notes:
1. Volumetric strain of a rectangular body subjected to an axial force is given as
εv =δV
V= ε (1− 2µ) ; where ε = Linear strain.
2. Volumetric strain of a rectangular body subjected to three mutually perpendicular forces is given by
εv = εx + εy + εz
where εx, εy and εz are the strains in the directions x-axis, y-axis and z-axis respectively.
20 Bulk Modulus (K)
K =Direct stress
Volumetric strain=
σ
δV/V
21 Relation Between Bulk Modulus (K) and Youngs Modulus (E)
K =E
3(1− 2µ)
22 Relation Between Youngs Modulus (E) and Modulus of Rigidity (G)
G =E
2(1 + µ)
23 Impact Stress (σi)
Sometimes, machine members are subjected to the load with impact. The stress produced in the member dueto the falling load is known as impact stress.We know that energy gained by the system in the form of strain energy = 1
2x Px δl
and potential energy lost by the weight = W (h+ δl)Since the energy gained by the system is equal to the potential energy lost by the weight, therefore
1
2x Px δl = W (h+ δl)
∵ P = σi x A, and δl =σ x l
E
∴1
2σi x A x
σ x l
E= W
(h+
σ x l
E
)∴Al
2Eσ2i −
Wl
Eσi −Wh = 0
From this quadratic equation, we find that
σi =W
A
(1 +
√1 +
2hAE
Wl
)Figure 10: Impact stress.
Note: When h = 0, then σi = 2W/A. This means that the stress in the bar when the load in applied suddenlyis double of the stress induced due to gradually applied load.

24 Resilience (U)
The strain energy stored in a body due to external loading, within elastic limit, is known as resilience and themaximum energy which can be stored in a body up to the elastic limit is called proof resilience. The proofresilience per unit volume of a material is known as modulus of resilience. It is an important property of amaterial and gives capacity of the material to bear impact or shocks.
U =σ2V
2E
Modulus of resilience =σ2
2E
Notes:
1. When a body is subjected to a shear load, then modulus of resilience (shear) = τ2
2G
2. When the body is subjected to torsion, then modulus of resilience = τ2
4G
25 Examples
25.1 Stress and Strain



25.2 Shear Modulus or Modulus of Rigidity

25.3 Bearing Stress

25.4 Stress-strain Diagram


25.5 Stresses in Composite Bars



25.6 Stresses due to Change in Temperature (Thermal Stresses)




25.7 Volumetric Strain

25.8 Impact Stress

25.9 Resilience

26 References
1. R.S. KHURMI, J.K. GUPTA, A Textbook Of Machine Design
27 Contacts