(Selido KIN A/1-7:Œ£œáŒ≠Œ¥Œ...μηχανή, είναι πολύ σημαντικό να...
12
F d θ s F s r s r d θ d MA d = r d sin( θ d ) = (20 cm)sin(5°) ≈ 2 cm MA s = r s sin( θ s ) = (2 cm)sin(80°) ≈ 2 cm Αρχές Εμβιομηχανικής Κεφάλαιο 1: Εισαγωγή στην εμβιομηχανική ανάλυση Κεφάλαιο 2: Μηχανικές Ιδιότητες των Υλικών Κεφάλαιο 3: Εμβιομηχανική των Οστών Κεφάλαιο 4: Εμβιομηχανική των Σκελετικών Μυών Κεφάλαιο 5: Εμβιομηχανική των Χόνδρων Κεφάλαιο 6: Εμβιομηχανική των Τενόντων και των Συνδέσμων Κεφάλαιο 7: Εμβιομηχανική των Αρθρώσεων ΜΕΡΟΣ I 1
Transcript of (Selido KIN A/1-7:Œ£œáŒ≠Œ¥Œ...μηχανή, είναι πολύ σημαντικό να...
-
F d
θs
F s
rs
rd
θd
MAd = r dsin( θd) = (20 cm)sin(5°) ≈ 2 cm
MAs = r ssin( θs) = (2 cm)sin(80°) ≈ 2 cm
Αρχές Εμβιομηχανικής
Κεφάλαιο 1: Εισαγωγή στην εμβιομηχανική ανάλυσηΚεφάλαιο 2: Μηχανικές Ιδιότητες των ΥλικώνΚεφάλαιο 3: Εμβιομηχανική των ΟστώνΚεφάλαιο 4: Εμβιομηχανική των Σκελετικών ΜυώνΚεφάλαιο 5: Εμβιομηχανική των ΧόνδρωνΚεφάλαιο 6: Εμβιομηχανική των Τενόντων και των ΣυνδέσμωνΚεφάλαιο 7: Εμβιομηχανική των Αρθρώσεων
ΜΕΡΟΣ
I
1
-
Τ ο πρώτο μέρος εισάγει τον αναγνώστη στις βασικές αρχές που χρησιμοποιούνται σε αυτό το βιβλίο, για τηνκατανόηση της δομής και λειτουργίας του μυοσκελετικού συστήματος. Εμβιομηχανική είναι η μελέτη τωνβιολογικών συστημάτων με την εφαρμογή των νόμων της φυσικής. Σκοπός του πρώτου μέρους είναι ναπροβεί σε επισκόπηση των αρχών και των εργαλείων της μηχανικής ανάλυσης και να περιγράψει τη μηχανική συμ-περιφορά των ιστών και των δομικών μονάδων που συνθέτουν το μυοσκελετικό σύστημα. Οι συγκεκριμένοι στό-χοι του μέρους αυτού είναι:
• Η επισκόπηση των αρχών που αποτελούν τα θεμέλια της εμβιομηχανικής ανάλυσης μη παραμορφώσιμων σω-μάτων
• Η επισκόπηση των μαθηματικών προσεγγίσεων που χρησιμοποιούνται στην εκτέλεση της εμβιομηχανικής ανά-λυσης μη παραμορφώσιμων σωμάτων
• Η εξέταση των εννοιών που χρησιμοποιούνται στον προσδιορισμό των υλικών ιδιοτήτων των παραμορφώσι-μων σωμάτων
• Η περιγραφή των υλικών ιδιοτήτων των πρωτογενών βιολογικών ιστών που αποτελούν το μυοσκελετικό σύ-στημα: οστά, μύες, χόνδροι και πυκνός συνδετικός ιστός
• Η επισκόπηση των συστατικών και της συμπεριφοράς των αρθρικών συμπλεγμάτωνΈχοντας κατανοήσει της αρχές της ανάλυσης της εμβιομηχανικής και των εμβιομηχανικών ιδιοτήτων των πρωτογε-νών ιστών του μυοσκελετικού συστήματος, ο αναγνώστης θα είναι έτοιμος να εφαρμόσει τις αρχές αυτές σε κάθεπεριοχή του σώματος για να κατανοήσει την μηχανική της φυσιολογικής κίνησης σε κάθε περιοχή και να εκτιμήσειτα αποτελέσματα των διαταραχών στην παθομηχανική της κίνησης.
ΜΕΡΟΣ I
-
3
ΜΑΘΗΜΑΤΙΚΗ ΕΠΙΣΚΟΠΗΣΗ ..................................................................................................................................................................................................00Μονάδες μέτρησης ..............................................................................................................................................................................................................00Τριγωνομετρία ........................................................................................................................................................................................................................00Σύστημα Συντεταγμένων ..................................................................................................................................................................................................00
ΔΥΝΑΜΕΙΣ ΚΑΙ ΡΟΠΕΣ ................................................................................................................................................................................................................00Δυνάμεις ......................................................................................................................................................................................................................................00Ροπή ..............................................................................................................................................................................................................................................00Δύναμη Μυών ..........................................................................................................................................................................................................................00
ΣΤΑΤΙΚΗ ..............................................................................................................................................................................................................................................00Νόμοι του Νεύτωνα ..............................................................................................................................................................................................................00Επίλυση Προβλημάτων ......................................................................................................................................................................................................00Απλά μυοσκελετικά προβλήματα ................................................................................................................................................................................00Σύνθετα μυοσκελετικά προβλήματα ..........................................................................................................................................................................00
ΚΙΝΗΜΑΤΙΚΗ ....................................................................................................................................................................................................................................00Περιστροφική και Μεταφορική Κίνηση ....................................................................................................................................................................00Μετατόπιση, Ταχύτητα και Επιτάχυνση ....................................................................................................................................................................00
ΚΙΝΗΤΙΚH ............................................................................................................................................................................................................................................00Δυνάμεις Αδράνειας ............................................................................................................................................................................................................00Έργο, Ενέργεια και Ισχύς ....................................................................................................................................................................................................00Τριβή ............................................................................................................................................................................................................................................00
ΠΕΡΙΛΗΨΗ ..........................................................................................................................................................................................................................................00
Μ ολονότι το ανθρώπινο σώμα είναι ένα απίστευτα πολύπλοκο βιολογικό σύστημα αποτελούμενο από τρισε-κατομμύρια κύτταρα, υπόκεινται στους ίδιους θεμελιώδεις νόμους της μηχανικής που διέπουν τις απλές με-ταλλικές ή πλαστικές δομές. Η μελέτη της απόκρισης των βιολογικών συστημάτων στις μηχανικές δυνάμειςαναφέρεται ως εμβιομηχανική. Παρόλο που δεν αναγνωρίζονταν ως επίσημη επιστήμη μέχρι τον 20ο αιώνα, η εμβιο-μηχανική είχε μελετηθεί από ανθρώπους όπως ο Λεονάρντο ντα Βίντσι, ο Γαλιλαίος και ο Αριστοτέλης. Η εφαρμογήτης εμβιομηχανικής στο μυοσκελετικό σύστημα οδήγησε στην καλύτερη κατανόηση τόσο της λειτουργίας όσο καιτης δυσλειτουργίας των αρθρώσεων, με αποτέλεσμα τη σχεδίαση βελτιωμένων βοηθημάτων όπως συστήματα αρ-θροπλαστικής των αρθρώσεων και ορθωτικά βοηθήματα. Επιπρόσθετα, βασικές έννοιες της μυοσκελετικής εμβιομη-χανικής είναι σημαντικές για κλινικούς όπως οι ορθοπεδικοί, οι φυσικοθεραπευτές και οι εργοθεραπευτές.
Η εμβιομηχανική συχνά αναφέρεται ως ο σύνδεσμος μεταξύ δομής και λειτουργίας. Ενώ ο θεραπευτής αξιολογείτον ασθενή από κινησιολογική άποψη, είναι συχνά μη πρακτικό ή απαραίτητο να προχωρήσει σε ολοκληρωμένηεμβιομηχανική ανάλυση. Παρόλα αυτά η εμπεριστατωμένη γνώση τόσο της εμβιομηχανικής όσο και της ανατομίαςείναι απαραίτητη για την κατανόηση των λειτουργιών του μυοσκελετικού συστήματος. Η εμβιομηχανική μπορείεπίσης να φανεί χρήσιμη σε μια κριτική αξιολόγηση σύγχρονων ή νέο–προτεινόμενων μεθόδων αξιολόγησης καιθεραπείας ασθενών. Τέλος, μια βασική κατανόηση της εμβιομηχανικής είναι απαραίτητη για την κατανόηση της
ΚΕΦΑΛΑΙΟ
1Εισαγωγή στην ΕμβιομηχανικήΑνάλυσηA N D R E W R . KA R D U N A , P H . D.
ΠΕΡΙΕΧΟΜΕΝΑ ΚΕΦΑΛΑΙΟΥ
-
ΜΑΘΗΜΑΤΙΚΗ ΕΠΙΣΚΟΠΗΣΗ
Αυτό το κεφάλαιο παρατίθεται ως επισκόπηση μερικώνβασικών μαθηματικών εννοιών που χρησιμοποιούνταιστην εμβιομηχανική. Μολονότι ο αναγνώστης μπορείνα το παραλείψει εάν είναι εξοικειωμένος με αυτό τουλικό, θα ήταν χρήσιμο να κάνει τουλάχιστον μια ανα-σκόπηση αυτού του κεφαλαίου.
Μονάδες Μέτρησης
Το πόσο σημαντικό είναι να περιλαμβάνονται οι μονά-δες στις μετρήσεις είναι πέρα από κάθε αμφιβολία. Οιμετρήσεις πρέπει να συνοδεύονται από μία μονάδα προ-κειμένου να έχουν φυσική σημασία. Μερικές φορέςυπάρχουν περιπτώσεις όπου οι συγκεκριμένες μονάδεςυπονοούνται. Αν ένας γιατρός ρωτήσει για το ύψοςενός ασθενούς και η απάντηση είναι «5–6», μπορεί λο-γικά να υποτεθεί ότι ο ασθενής έχει ύψος 5 πόδια και 6ίντσες. Ωστόσο, αυτή η ερμηνεία θα ήταν ανακριβήςεάν ο ασθενής ήταν στην Ευρώπη, όπου χρησιμοποιεί-ται το μετρικό σύστημα. Υπάρχουν επίσης περιπτώσειςόπου η έλλειψη μονάδων καθιστά έναν αριθμό εντελώςάχρηστο. Εάν στον ασθενής είχε ζητηθεί να εκτελέσειμία σειρά από ασκήσεις ανά δύο, ο ασθενής δεν θα είχειδέα εάν αυτό σήμαινε δύο ημέρες, δυο εβδομάδες δυομήνες ή ακόμη δυο έτη.
Οι μονάδες που χρησιμοποιούνται στην εμβιομηχα-
νική μπορούν να χωριστούν σε δύο κατηγορίες. Υπάρ-χουν τα τέσσερα θεμελιώδη μεγέθη του μήκους, τηςμάζας, του χρόνου και της θερμοκρασίας, που ορίζονταιβασισμένα σε παγκόσμια αποδεκτές σταθερές. Κάθεάλλο μέγεθος θεωρείται παράγωγο μέγεθος και μπορείνα οριστεί σε σχέση με αυτά τα θεμελιώδη μεγέθη. Γιαπαράδειγμα, η ταχύτητα ισούται με το μήκος διαιρού-μενο δια του χρόνο και η δύναμη ισούται με τη μάζαπολλαπλασιαζόμενη επί το μήκος και διαιρούμενη διατου τετράγωνου του χρόνου. Ένας κατάλογος όλωντων μεγεθών και των μονάδων μέτρησης τους που απαι-τούνται στην εμβιομηχανική βρίσκεται στον Πίνακα 1.1.
Τριγωνομετρία
Εφόσον οι γωνίες είναι τόσο σημαντικές στην ανάλυσητου μυοσκελετικού συστήματος, η τριγωνομετρία είναιένα πολύ χρήσιμο εμβιομηχανικό εργαλείο. Η αποδε-κτή μονάδα μέτρηση γωνιών στην κλινική πρακτικήείναι η μοίρα. Υπάρχουν 360° σε έναν κύκλο. Εάν μι-λάμε για ένα μόνο τμήμα του κύκλου τότε η γωνία πουσχηματίζεται είναι κάποιο κλάσμα των 360°. Για παρά-δειγμα το ένα τέταρτο του κύκλου περιέχει γωνία 90°.Παρόλο που σε γενικές γραμμές, η μονάδα που υιοθε-τείται στο κείμενο αυτό είναι η μοίρα, οι γωνίες μπο-ρούν επίσης να περιγραφούν με τον όρο του ακτινίου.Εφόσον σε κάθε κύκλο υπάρχουν 2π ακτίνια, υπάρχουν57.3° σε κάθε ακτίνιο. Όταν χρησιμοποιείται αριθμο-
4 Μέρος Ι / ΑΡΧΕΣ ΕΜΒΙΟΜΗΧΑΝΙΚΗΣ
ορολογίας που σχετίζεται με την κινησιολογία (ροπή στρέψης, ροπή, μοχλοβραχίονας).
Οι σκοποί αυτού του κεφαλαίου είναι:
• Η επισκόπηση των βασικών μαθηματικών αρχών που χρησιμοποιούνται στην εμβιομηχανική• Η περιγραφή της δύναμης και της ροπής• Η συζήτηση των αρχών της στατικής ανάλυσης• Η παρουσίαση βασικών εννοιών της κινηματικής και κινητικήςΗ ανάλυση είναι περιορισμένη σε άκαμπτα σώματα. Η συζήτηση για τα παραμορφώσιμα σώματα γίνεται στα Κεφά-λαιο 2–6. Το υλικό αυτού του κεφαλαίου είναι μια σημαντική παραπομπή για τα κεφάλαια ανάλυσης δυνάμεων σεόλο το κείμενο.
Μέγεθος Μετρικό (σύστημα) Βρετανικό (σύστημα) Μετατροπή
Μήκος Μέτρο (m) πόδι 1 ft = 0.3048 μέτρα
Μάζα κιλό (kg) 1 slug 1 slug = 14.59 kg
Χρόνος Δευτερόλεπτα (s) Δευτερόλεπτα (s) 1 s = 1 s
Θερμοκρασία Κελσίου (οC) Φαρενάιτ (οF) 1οF = (9/5) × ο + 32ο
Δύναμη Νιούτον (Ν = Kg × m/s2) Λίβρα (1lb = slug × Ft/s2) 1 LB = 4.448 N
Πίεση Πασκάλ (Pa = N/m2) Λίβρες ανά τετραγωνική ίντσα (psi = lb/in2) 1 psi = 6895 Pa
Ενέργεια Τζάουλ (j = N × m) Πόδι επί λίβρα (ft-lb) 1 ft-lb = 1.356 J
Ισχύς Βατ (Watt) (W = J/s) Ιπποδύναμη 1 hp = 7457 Watt
ΠΙΝΑΚΑΣ 1.1: Μονάδες μέτρησης που χρησιμοποιούνται στην εμβιομηχανική
-
μηχανή, είναι πολύ σημαντικό να προσδιορίζεται ανείναι ρυθμισμένη σε μοίρες ή σε ακτίνια. Επιπρόσθετα,μερικά προγράμματα υπολογιστών όπως το MicrosoftExcel, χρησιμοποιούν ακτίνια για την εκτέλεση τριγω-νομετριών υπολογισμών.
Οι τριγωνομετρικές συναρτήσεις είναι πολύ χρήσι-μες στην εμβιομηχανική για την ανάλυση δυνάμεων στιςσυνισταμένες τους, συσχετίζοντας γωνίες και αποστά-σεις σε ένα ορθογώνιο τρίγωνο (τρίγωνο που περιέχειμια γωνία 90°). Οι πιο θεμελιώδεις από αυτές τις σχέσεις(ημίτονο, συνημίτονο και εφαπτομένη) φαίνονται στηνΕικόνα 1.1Α. Hμίτονο είναι η απέναντι πλευρά δια τηνυποτείνουσα, συνημίτονο είναι η προσκείμενη πλευράδια την υποτείνουσα και εφαπτομένη είναι η απέναντιπλευρά δια την προσκείμενη πλευρά. Μολονότι μπορούννα χρησιμοποιηθούν αριθμομηχανές για τον υπολογισμόαυτών των συναρτήσεων, μερικές σημαντικές τιμές πουαξίζουν απομνημόνευση είναι:
ημ (0°) = 0, ημ (90°) = 1 (Εξίσωση 1.1)συν (0°) = 1, συν (90°) = 0 (Εξίσωση 1.2)
εφ (45ο) = 1 (Εξίσωση 1.3)
Επιπλέον, το Πυθαγόρειο θεώρημα δηλώνει πως σε έναορθογώνιο τρίγωνο, το άθροισμα των τετραγώνων τωνπλευρών που σχηματίζουν την ορθή γωνία ισούται μετο τετράγωνο της υποτείνουσας. (Εικ. 1.1Α). Μολονότιχρησιμοποιούνται σπανιότερα, υπάρχουν επίσης εξισώ-σεις που σχετίζουν τις γωνίες με τα μήκη των πλευρώνγια τρίγωνα που δεν περιέχουν ορθή γωνία (Εικ. 1.1Β).
Ανάλυση διανυσμάτων
Οι εμβιομηχανικές παράμετροι μπορεί να αναπαρα-σταθούν είτε σαν βαθμωτά (μονόμετρα) είτε σαν δια-
νυσματικά μεγέθη. Ένα βαθμωτό μέγεθος αντιπροσω-πεύεται απλά και μόνο από το μέτρο του. Η μάζα, οχρόνος και το μήκος είναι παραδείγματα βαθμωτών με-γεθών. Ένα διανυσματικό μέγεθος περιγράφεται γε-νικά από το μέτρο και την κατεύθυνση του. Επιπλέον,μια πλήρης περιγραφή του διανύσματος περιλαμβάνειτη φορά του και το σημείο εφαρμογής του. Οι δυνά-μεις και η ροπή είναι παραδείγματα διανυσματικών με-γεθών. Σκεφτείτε την περίπτωση ενός ανθρώπου βάρους160lb που κάθεται σε μια καρέκλα για 10 δευτερόλεπτα.Η δύναμη που το βάρος του ανθρώπου εξασκεί στηνκαρέκλα αναπαρίσταται από ένα διάνυσμα με μέτρο(160 λίβρες), διεύθυνση (κάθετη), φορά (προς τα κάτω)και σημείο εφαρμογής (το κάθισμα της καρέκλας).Ωστόσο, ο χρόνος που κάθεται στην καρέκλα είναι βαθ-μωτό μέγεθος και αντιπροσωπεύεται μόνο από το μέτροτου (10 δευτερόλεπτα).
Για την αποφυγή συγχύσεων στο κείμενο, χρησιμο-ποιούνται αναπαραστάσεις με έντονα τυπογραφικά στοι-χεία για διάκριση διανυσματικών (Α) από βαθμωτάμεγέθη. Εναλλακτικές αναπαραστάσεις για τα διανύ-σματα συναντώνται στη βιβλιογραφία (και στη σχολικήτάξη, όπου είναι δύσκολη η χρήση έντονα τυπωμένωνγραμμάτων) συμπεριλαμβανομένων της υπογράμμισητου γράμματος (Α), τη σημείωση γραμμής πάνω από τογράμμα (Ā) ή ενός βέλους πάνω από το γράμμα ( ). Τομέτρο δοσμένου διανύσματος (Α) αναπαρίσταται από τοίδιο γράμμα χωρίς έντονο τυπογραφικό στοιχείο (Α).
A
Κεφάλαιο 1 / ΕΙΣΑΓΩΓΗ ΣΤΗΝ ΕΜΒΙΟΜΗΧΑΝΙΚΗ ΑΝΑΛΥΣΗ 5
b
a
c
θ
b
a
c
θψ
φ
A
B
Α. Τριγωνομετρικές εξισώσεις:
Πυθαγόρειο Θεώρημα:
a2 + b 2 = c2
B. Νόμος Συνημίτονων
a2 + b 2 – 2abσυν (θ) = c2
Νόμος Ημίτονων:
ημ (θ) =
συν (θ) =
εφ (θ) =
bcac
ab
b = a = cημψ ημφ ημθ
Εικόνα 1.1: Βασικές τριγωνομετρικές εξισώσεις. Αυτές είναι με-ρικές από τις βασικές τριγωνομετρικές εξισώσεις που είναι χρή-σιμες στην εμβιομηχανική. Α. Ορθογώνιο τρίγωνο. Β. Ένα τυχαίοτρίγωνο.
Κατά κύριο λόγο, η πιο συχνή χρήση διανυσμάτωνστην εμβιομηχανική γίνεται για την αναπαράσταση δυ-νάμεων όπως οι δυνάμεις των μυών, της αντίδρασηςτων αρθρώσεων καθώς και δυνάμεων της αντίστασης.Αυτές οι δυνάμεις μπορούν να αναπαρασταθούν γρα-φικά χρησιμοποιώντας μιας γραμμής με ένα βέλος στοένα της άκρο. (Εικ. 1.2Α).
Το μήκος της γραμμής αντιπροσωπεύει το μέτροτης, η γωνιακή θέση αντιπροσωπεύει την διεύθυνσητης, η θέση του άκρου με το βέλος αντιπροσωπεύει τηφορά της, η θέση του άλλου άκρου αντιπροσωπεύει τοσημείο εφαρμογής της. Εναλλακτικά, αυτό το ίδιο διά-νυσμα μπορεί να αναπαρασταθεί μαθηματικά με τηχρήση είτε πολικών συντεταγμένων είτε με διανυσμα-τική ανάλυση. Οι πολικές συντεταγμένες αναπαρι-στούν το μέτρο και την κατεύθυνση του διανύσματοςάμεσα. Στις πολικές συντεταγμένες το ίδιο διάνυσμαθα ήταν να είναι 5Ν στις 37ο από το οριζόντιο επίπεδο(Εικ. 1.2Β). Με τη διανυσματική ανάλυση, το διάνυ-σμα αναλύεται στις σχετικές συνιστώσες και στους δύοάξονες. Σε αυτό το παράδειγμα, το διάνυσμα Α ανα-λύεται στις συνιστώσες του Αχ = 4Ν και Αψ = 3Ν (Εικ.1.2 Γ). Συχνά είναι χρήσιμο να αναλύεις διανύσματαστις συνιστώσες τους όταν αυτά συμπίπτουν με ανα-τομικές διευθύνσεις. Μπορεί έτσι οι άξονες χ και ψ νααντιστοιχούν στην ανώτερη και κατώτερη διεύθυνσηαντίστοιχα.
-
Μολονότι η γραφική παράσταση των διανυσμάτωνείναι χρήσιμη για τους οπτικούς σκοπούς, η αναλυτικήαναπαράσταση είναι πιο βολική όταν προσθέτουμε καιπολλαπλασιάζουμε διανύσματα.
Προσέξτε ότι πληροφορίες σχετικά με τη διεύ-θυνση (πάνω και δεξιά) του διανύσματος εμπεριέχον-ται στην πληροφορία αυτή. Ένα διάνυσμα με το ίδιομέτρο και διεύθυνση όπως αυτό που αναπαρίσταταιστην Εικόνα. 1.2 Γ, αλλά με αντίθετη φορά (κάτω καιαριστερά) αναπαριστάται από το Αχ = –4Ν και Αψ =–3Ν ή 5Ν στις 217°. Η περιγραφή της πληροφορίαςσχετικά με το σημείο εφαρμογής θα συζητηθεί αργό-τερα σε αυτό το κεφάλαιο.
ΠΡΟΣΘΕΣΗ ΔΙΑΝΥΣΜΑΤΩΝ
Όταν μελετάμε τη μυοσκελετική εμβιομηχανική είναισυνηθισμένο να έχουμε περισσότερες από μια δυνάμειςνα μελετήσουμε. Έτσι, είναι σημαντικό να καταλάβουμεπως δουλεύουμε με περισσότερες από δύο δυνάμεις.Όταν προσθέτουμε ή αφαιρούμε δύο διανύσματα πρέ-πει να λάβουμε υπόψη κάποιες σημαντικές ιδιότητες. Ηπρόσθεση των διανυσμάτων είναι αντιμεταθετική:
Α + Β = Β + Α (Εξίσωση 1.4)Α – Β = Α + (– Β) (Εξίσωση 1.5)
Η πρόσθεση των διανυσμάτων είναι προσεταιριστική:
Α + (Β + C) = (A + B) + C (Εξίσωση 1.6)
Σε αντίθεση με τα μονόμετρα μεγέθη, τα οποία μπο-ρούν απλά να προστεθούν, τόσο το μέτρο όσο και η δι-
εύθυνση πρέπει να λαμβάνονται υπόψη στα διανύ-σματα. Η λεπτομερής διαδικασία πρόσθεσης δύο δια-νυσμάτων (Α+Β = C) φαίνεται στο Πλαίσιο 1.1. για τηνγραφική αναπαράσταση, την αναπαράσταση πολικών
6 Μέρος Ι / ΑΡΧΕΣ ΕΜΒΙΟΜΗΧΑΝΙΚΗΣ
Εικόνα 1.2: Διανύσματα. Α. Γενικά, ένα διάνυσμα έχει ένα μέτρο,διεύθυνση, σημείο εφαρμογής και φορά. Μερικές φορές το ση-μείο εφαρμογής δεν σημειώνεται συγκεκριμένα στην εικόνα. Β.Μια αναπαράσταση πολικών συντεταγμένων. Γ. Μια αναπαρά-σταση συνιστωσών.
θ
Φορά
Μέτρο
Διεύθυνση
Σημείο εφαρμογής
A A = 5 Nθ = 37 °
Ax = 4 NAy = 3 N
Ax
Ay
A. Γραφική μέθοδος
B. Πολικές συντεταγμένες
Γ. Συνιστώσες
B
A
C
Νόμος Συνημίτονων:Α2 + Β2 – 2ΑΒσυν(θ+φ) = C2 C = 5.4 N
θφ
φ
θ
θ
B
A
C
B
A
A
θ
ψ
φ
C
BB y
Ay
Ax
C x
B x
C y
Νόμος Συνημίτονων
Νόμος Ημίτονων
ημψ =
ημ(θ+φ)
ψ = 31°
Αχ = Αεφ(θ) = 4ΝΑψ = Αημ(θ) = 3Ν
Βχ = -Βσυν(φ) = -2ΝΒψ = Βημ(φ) = 2Ν
Cx = Αχ + Βχ = 2ΝCψ = Αψ + Βψ = 5Ν
A = 5NB = 2.8Nθ = 37°φ = 45°
Επομένως, η γωνία που δημιουργεί το C με τονοριζόντιο άξονα είναι 68° ( = ψ + θ)
CB
Πρόσθεση 2 διανυσμάτων: Α + Β
Μέθοδος Α: Γραφική
Μέθοδος Β: Πολικών Συντεταγμένων
Μέθοδος Γ: Συνιστώσες
y
x
ΠΛΑΙΣΙΟ ΑΝΑΛΥΣΗΣ ΔΥΝΑΜΕΩΝ 1.1
ΠΡΟΣΘΕΣΗ ΔΥΟ ΔΙΑΝΥΣΜΑΤΩΝ
-
συντεταγμένων και τη ανάλυση διανυσμάτων. Η γρα-φική αναπαράσταση χρησιμοποιεί τη μέθοδο «το τέλοςτου πρώτου γίνεται αρχή του δεύτερου». Το πρώτο βήμαείναι να σχεδιάσετε το πρώτο διάνυσμα, Α. Στη συνέ-χεια το δεύτερο διάνυσμα Β, σχεδιάζεται έτσι ώστε ηαρχή του να συμπέσει με το τέλος του πρώτου διανύ-σματος. Το διάνυσμα (C) που αντιπροσωπεύει το άθροι-σμα των δύο αυτών διανυσμάτων δημιουργείται ανενώσουμε την αρχή του Α με το τέλος του Β. Αφού ηπρόσθεση των διανυσμάτων είναι αντιμεταθετική, θαπαίρναμε το ίδιο αποτέλεσμα εάν το Β ήταν το πρώτοδιάνυσμα. Όταν χρησιμοποιούμε τις πολικές συντεταγ-μένες τα διανύσματα σχεδιάζονται ακριβώς όπως καιστην γραφική μέθοδο και μετά χρησιμοποιείται ο νόμοςτων συνημίτονων για τον προσδιορισμό της αριθμητι-κής τιμής του C και ο νόμος των ημίτονων για τον προσ-διορισμό της διεύθυνσης του C (βλ. Εικ. 1.1 για τουςορισμούς των νόμων αυτών).
Στη μέθοδο της ανάλυσης διανυσμάτων, κάθε διά-νυσμα αναλύεται στις αντίστοιχες χ και ψ συνιστώσες.Κάθε συνιστώσα αναπαριστά την αριθμητική τιμή τουδιανύσματος σε αυτή την κατεύθυνση. Οι συνιστώσες χκαι ψ αθροίζονται:
Cx = Ax + Bx (Εξίσωση 1.7)Cψ = Αψ + ΒΨ (Εξίσωση 1.8)
Το διάνυσμα C μπορεί είτε δοθεί είτε σε σχέση με τις συ-νιστώσες Cx και Cψ ή να μετατραπεί σε αριθμητική τιμήC με χρήση του Πυθαγόρειου θεωρήματος και διεύ-θυνση θ με τη χρήση της τριγωνομετρίας. Αυτή η μέθο-δος είναι η πιο αποτελεσματική από τις τρεις που έχουμεμέχρι τώρα παρουσιάσει και είναι αυτή που χρησιμο-ποιείται στο κείμενο.
ΠΟΛΛΑΠΛΑΣΙΑΣΜΟΣ ΔΙΑΝΥΣΜΑΤΩΝ
Ο πολλαπλασιασμός ενός διανύσματος με έναν αριθμόείναι πιο απλός. Ουσιαστικά, κάθε συνιστώσα του δια-νύσματος πολλαπλασιάζεται μόνη της με τον αριθμόέχοντας σαν αποτέλεσμα ένα νέο διάνυσμα. Για παρά-δειγμα εάν το διάνυσμα της Εικόνας 1.2 πολλαπλασια-στεί με το 5, το αποτέλεσμα είναι Ax = 5 x 4 = 20Ν και Αψ
= 5 x 3 = 15Ν. Άλλος τύπος πολλαπλασιασμού διανυ-σμάτων είναι το εξωτερικό γινόμενο, στο οποίο δύο δια-νύσματα πολλαπλασιάζονται μεταξύ τους, δίνοντας έναάλλο διάνυσμα (C = A x B). Η διεύθυνση του C είναι τέ-τοια ώστε να είναι ταυτόχρονα κάθετη στο Α και στο Β.Η αριθμητική τιμή του C υπολογίζεται ως C = A x B x ημ(θ), όπου θ είναι η γωνία μεταξύ του Α και του Β, και τοx δηλώνει αριθμητικό πολλαπλασιασμό. Αυτές οι σχέ-σεις απεικονίζονται στην Εικόνα 1.3. Το εξωτερικό γι-νόμενο χρησιμοποιείται παρακάτω σε αυτό το κεφάλαιογια τον υπολογισμό της ροπής των αρθρώσεων.
Συστήματα συντεταγμένων
Μια τρισδιάστατη ανάλυση είναι απαραίτητη για τηνπλήρη αναπαράσταση της ανθρώπινης κίνησης. Τέτοιεςαναλύσεις απαιτούν ένα σύστημα συντεταγμένων, τοόποιο αποτελείται από ανατομικούς άξονες: μετωπιαίος(ΜΕ), προσθιοπίσθιος ή οβελιαίος (ΠΟ), και κατακό-ρυφος (ΚΑ). Είναι συχνά βολικό να εκτελείται μόνοδισδιάστατη ή επίπεδη ανάλυση, στην οποία να εξετά-ζονται μόνο δύο από τους τρεις άξονες. Στο ανθρώπινοσώμα, υπάρχουν τρία κάθετα ανατομικά επίπεδα, ταοποία αναφέρονται ως βασικά ή στεφανιαία επίπεδα.Το προσθιοπίσθιο ή οβελιαίο επίπεδο ορίζεται απότους άξονες ΚΑ και ΠΟ, το μετωπιαίο επίπεδο ορίζε-ται από τους άξονες ΚΑ και ΜΕ, και το εγκάρσιο επί-πεδο ορίζεται από τους άξονες ΠΟ και ΜΕ. (Εικ 1.4).
Μπορεί να γίνει αναφορά στη κίνηση κάθε οστού σεσχέση είτε με ένα τοπικό είτε με ένα συνολικό σύστημασυντεταγμένων. Για παράδειγμα, η κίνηση της κνήμηςμπορεί να περιγραφεί με το πώς κινείται σε σχέση με τομηρό (τοπικό σύστημα συντεταγμένων) ή με το πώς κι-νείται σε σχέση με το χώρο (γενικό σύστημα συντεταγμέ-νων). Το τοπικό σύστημα συντεταγμένων είναι χρήσιμογια την κατανόηση της λειτουργίας της άρθρωσης και τονπροσδιορισμού του εύρους της κίνησης, ενώ το γενικό σύ-στημα συντεταγμένων είναι χρήσιμο όταν αναφερόμαστεσε λειτουργικές δραστηριότητες.
Το μεγαλύτερο μέρος του κειμένου επικεντρώνεταιστην δισδιάστατη ανάλυση για διάφορους λόγους. Κατ’αρχήν είναι δύσκολη η τρισδιάστατη αναπαράσταση τωνπληροφοριών στη δισδιάστατη σελίδα του βιβλίου. Επι-πλέον, η μαθηματική ανάλυση τρισδιάστατων προβλημά-των είναι πιο περίπλοκη. Ίσως ο πιο σημαντικός λόγοςείναι ότι οι βασικές εμβιομηχανικές αρχές σε μια δισδιά-στατη ανάλυση είναι ίδιες με εκείνες της τρισδιάστατηςανάλυσης. Είναι έτσι δυνατό να χρησιμοποιήσουμε μιααπλοποιημένη δισδιάστατη αναπαράσταση για ένα τρισ-διάστατο πρόβλημα ώστε να βοηθήσουμε στην επεξήγησημιας έννοιας με τη λιγότερο δυνατή μαθηματική πολυ-πλοκότητα (ή τουλάχιστον λιγότερη πολυπλοκότητα).
ΔΥΝΑΜΕΙΣ ΚΑΙ ΡΟΠΕΣ
Το μυοσκελετικό σύστημα ευθύνεται τόσο για τη δημι-
Κεφάλαιο 1 / ΕΙΣΑΓΩΓΗ ΣΤΗΝ ΕΜΒΙΟΜΗΧΑΝΙΚΗ ΑΝΑΛΥΣΗ 7
Κατεύθυνση του C: κάθετα ως προςκαι το Α και το Β.
B
A
C Μέτρο του C: C = AB ημ(θ)
θ
Εικόνα 1.3: Εξωτερικό γινόμενο. Το C αναπαριστάται ως το εξωτε-ρικό γινόμενο των A και Β. Σημειώστε ότι τα Α και Β θα μπορούσαννα αποτελούν οποιαδήποτε δυο διανύσματα στο συγκεκριμένοεπίπεδο ενώ το C θα διατηρούσε την ίδια κατεύθυνση.
-
ουργία δυνάμεων που κινούν το ανθρώπινο σώμα στοχώρο όσο και για την αποφυγή ανεπιθύμητων κινή-σεων. Η κατανόηση της μηχανικής και παθομηχανικήςτης ανθρώπινης κίνησης απαιτεί την ικανότητα να με-λετήσουμε τις δυνάμεις και τις ροπές που εφαρμόζονταικαι δημιουργούνται από το σώμα ή ένα από συγκεκρι-μένο τμήμα του σώματος.
Δυνάμεις
Ο αναγνώστης μπορεί να έχει μια γενική ιδέα για το τιείναι δύναμη, αλλά να του είναι δύσκολο να σκεφτείέναν έγκυρο ορισμό. Για τους σκοπούς αυτού του κει-μένου, η δύναμη ορίζεται ως «η ώθηση ή η έλξη» πουαπορρέει από τη φυσική επαφή μεταξύ δύο αντικειμέ-νων. Η μόνη εξαίρεση σε αυτό τον κανόνα που αναφέ-ρεται στο κείμενο είναι η δύναμη που οφείλεται στηβαρύτητα στην οποία δεν υπάρχει απευθείας επαφήδύο αντικειμένων. Μερικές από τις πιο συνηθισμένεςπηγές δυνάμεων σε σχέση με το μυοσκελετικό σύστημαείναι οι μύες/τένοντες, οι σύνδεσμοι, η τριβή, η αντί-δραση του εδάφους και το βάρος.
Πρέπει να γίνει διάκριση ανάμεσα στη μάζα και τοβάρος ενός σώματος. Η μάζα ενός σώματος ορίζεταιως η ποσότητα της ύλης που αποτελεί το αντικείμενο.Το βάρος είναι η δύναμη που ασκείται στο αντικείμενολόγω της βαρύτητας και είναι το γινόμενο της μάζαςκαι της επιτάχυνσης της βαρύτητας (g = 9,8 m/s2). Έτσι,ενώ η μάζα ενός σώματος είναι η ίδια στη Γη και στησελήνη, το βάρος του είναι μικρότερο στη σελήνη γιατίη επιτάχυνση της βαρύτητας είναι μικρότερη στη σε-λήνη. Η διάκριση αυτή είναι πολύ σημαντική στην εμ-βιομηχανική, όχι για να μας βοηθήσει να σχεδιάσουμεένα ταξίδι στη σελήνη, αλλά για να είμαστε σίγουροιότι δεν αντιμετωπίζουμε τις μονάδες της μάζας ως μο-νάδες δύναμης.
Όπως προαναφέραμε, η δύναμη είναι ένα διανυ-σματικό μέγεθος με μέτρο, διεύθυνση, φορά και σημείοεφαρμογής. Η Εικόνα 1.5 αναπαριστά διάφορες δυνά-μεις που ασκούνται στο κάτω άκρο στο μετωπιαίο επί-πεδο κατά τη στάση.Οι δυνάμεις από τους απαγωγούς και προσαγωγούςμύες επιδρούν μέσω των τενόντιων προσφύσεών τους,ενώ η δύναμη αντίδρασης της άρθρωσης του ισχίουεπιδρά διαμέσου του σχετικού κέντρου περιστροφής.Γενικά, το σημείο εφαρμογής μιας δύναμης (πχ η πρό-σφυση του τένοντα) προσδιορίζεται σε σχέση με ένασταθερό σημείο πάνω στο σώμα, συνήθως το κέντροπεριστροφής της άρθρωσης. Αυτή η πληροφορία χρη-σιμοποιείται για τον υπολογισμό της ροπής που προ-καλείται λόγω αυτής της δύναμης.
Ροπή
Στην κινησιολογία, η ροπή (M) προκαλείται από μια δύ-ναμη (F) που ενεργεί σε μια απόσταση (r) από το κέντροτης περιστροφής ενός τμήματος. Η ροπή τείνει να προ-καλέσει περιστροφή και καθορίζεται από τη εξίσωσηεξωτερικού γινομένου: Μ = r x F. Έτσι, η ροπή αντι-προσωπεύεται από ένα διάνυσμα που περνά από το ση-μείο αναφοράς (π.χ., το κέντρο της περιστροφής) καιείναι κάθετο τόσο στο διάνυσμα της δύναμης όσο καιτης απόστασης (Εικ 1.6). Για μια δισδιάστατη ανάλυση,τόσο το διάνυσμα της δύναμης όσο και της απόστασηςβρίσκονται στο επίπεδο, συνεπώς το διάνυσμα της ροπής
8 Μέρος Ι / ΑΡΧΕΣ ΕΜΒΙΟΜΗΧΑΝΙΚΗΣ
Εικόνα 1.4: Βασικά ή στεφανιαία επίπεδα. Τα βασικά επίπεδα,οβελιαίο, μετωπιαίο και εγκάρσιο, αποτελούν χρήσιμα πλαίσιααναφοράς σε μια τρισδιάστατη αναπαράσταση του σώματος. Σεδισδιάστατες αναλύσεις, το οβελιαίο επίπεδο αποτελεί το σύνη-θες πλαίσιο αναφοράς.
Άνω
Κάτω
Οπίσθια
ΠρόσθιαΕγκάρσιο
Μετωπιαίο Οβελιαίο
Έξω
Έσω
-
έχει πάντα διεύθυνση κάθετη στο επίπεδο αυτό, ενώ ηδιεύθυνσή της διέρχεται από το σημείο αναφοράς.Επειδή έχει μόνο μια διεύθυνση και φορά, η ροπή αντι-μετωπίζεται συχνά ως βαθμωτό μέγεθος σε μια δισδιά-στατη ανάλυση, που έχει μόνο μέτρο και φορά. Η ροπήστρέψης είναι ένας άλλος όρος που είναι συνώνυμος με
την διανυσματική ροπή. Από τον ορισμό ενός εξωτερι-κού γινομένου, το μέγεθος της ροπής (ή ροπής στρέψης)υπολογίζεται ως Μ = r x F x ημ (θ). Η διεύθυνση της ανα-φέρεται ως η διεύθυνση κατά την οποία θα έτεινε ναπροκαλέσει περιστροφή του αντικείμενου (Εικ 1.7 Α).
Αν και υπάρχουν πολλές διαφορετικές αποστάσειςπου μπορούν να χρησιμοποιηθούν για να συνδέσουν έναδιάνυσμα και ένα σημείο, η ροπή που υπολογίζεται είναιίδια όποια κι αν είναι η απόσταση που επιλέγεται (Εικ1.7 Β). Η απόσταση που είναι κάθετη στο διάνυσμα τηςδύναμης αναφέρεται ως μοχλοβραχίονας ροπής της δύ-ναμης αυτής ή απλούστερα μοχλοβραχίονας δύναμης (r2στην Εικ 1.7 Β). Δεδομένου ότι το ημίτονο των 90° είναιίσο με 1, η χρήση ενός μοχλοβραχίονα δύναμης απλοποιείτον υπολογισμό της ροπής στο Μ = ΜF x F. Ο μοχλοβρα-χίονας δύναμης μπορεί επίσης να υπολογιστεί από οποι-αδήποτε απόσταση ως ΜF = r x ημ (θ). Επιπλέον, αν καιυπάρχουν τέσσερις χωριστές γωνίες μεταξύ των διανυ-σμάτων της δύναμης και της απόστασης, η χρήση οποι-ασδήποτε από τις τέσσερις αυτές γωνίες έχει ωςαποτέλεσμα τον υπολογισμό της ίδιας ροπής (Εικ 1.7Γ).
Τα παραδείγματα στις Εικόνες 1.6 και 1.7 αποτελούν-
Κεφάλαιο 1 / ΕΙΣΑΓΩΓΗ ΣΤΗΝ ΕΜΒΙΟΜΗΧΑΝΙΚΗ ΑΝΑΛΥΣΗ 9
Εικόνα 1.5: Διανύσματα στην ανατομία. Ένα παράδειγμα τουτρόπου με τον οποίο τα διανύσματα μπορούν να συνδυαστούνμε ανατομικές λεπτομέρειες για την αναπαράσταση της δράσητων δυνάμεων. Μερικές από τις δυνάμεις που ενεργούν στοκάτω άκρο φαίνονται στην εικόνα.
F
F ΑΑ
ΑΠ
F ΠΡ
F ΑΕ
F ΑΠ - Δύναμη απαγωγών μυώνF ΠΡ - Δύναμη προσαγωγών μυώνF ΑΑ - Δύναμη αντίδρασης της άρθρωσης F ΑΕ - Δύναμη αντίδρασης του εδάφους
F
Mr
Εικόνα 1.6: Τρισδιάστατη ανάλυση ροπής. Η ροπή που ενεργείστον αγκώνα από τη δύναμη του δικέφαλου μυός αναπαρίστα-ται ως ένα διάνυσμα η διεύθυνση του οποίου συμπίπτει με τονάξονα της περιστροφής. F, το διάνυσμα της δύναμης, r η από-σταση του διανύσματος της δύναμης από το κέντρο περιστρο-φής της άρθρωσης. και M, το διάνυσμα της ροπής
-
10 Μέρος Ι / ΑΡΧΕΣ ΕΜΒΙΟΜΗΧΑΝΙΚΗΣ
F
r
Rotation
θ
M = Frsin( θ)
r1
r2
r3
r4
r1
θ1
M = Fr 1sin( θ1)M = Fr 2sin( θ2) = F *MAM = Fr 3sin( θ3)M = Fr 4sin( θ4)
θ2
θ3
θ4
F
A
B
r1
θ2θ4
F
θ1
θ3
sin( θ1) = sin( θ3)= sin(180º – θ1) = sin( θ2)= sin(180º – θ1) = sin( θ4)
r
C
στον Αχίλλειο τένοντα. Β. Παρατηρείστε πως ανεξάρτητα με τοποιο διάνυσμα απόστασης επιλέγεται, η τιμή για τη ροπή είναιίδια. Γ. Επίσης ανεξάρτητα με την επιλεχθείσα γωνία, η τιμή τουημιτόνου της γωνίας είναι ίδια και κατά συνέπεια η ροπή είναι ίδια.
Εικόνα 1.7: Δισδιάστατη ανάλυση ροπής. Α. η ροπή της πελματι-αίας κάμψης που δημιουργείται από την δύναμη που ασκείται
�F 1
�F 1
�F 2
�F 2
Serratus anterior
Upper trapezius
COR
COR
d d
A. Idealized
B. Actual
�F 1 = �F 2-
�F 1 �F 2 -
Εικόνα 1.8: Ζεύγη δυνάμεων. Διάκριση μεταξύ ενός ιδεατούζεύγους δύναμης (Α) και ενός περισσότερο ρεαλιστικού (Β). Πα-ρόλο που το δεδομένο παράδειγμα της ωμοπλάτης δεν αποτε-λεί ένα πραγματικό ζεύγος δυνάμεων, συνήθως αναφέρεται σανένα ζεύγος δυνάμεων. COR, είναι το κέντρο περιστροφής.
-
ται τόσο από δυνάμεις όσο και από ροπές. Εξετάστε εν-τούτοις, την κατάσταση στην Εικόνα 1.8Α. Αν και οι δύοδυνάμεις που ασκούνται δημιουργούν μία ροπή, έχουν τοίδιο μέτρο και την ίδια διεύθυνση αλλά αντίθετη φορά.Επομένως, το άθροισμα των διανυσμάτων τους είναιμηδέν. Αυτό είναι ένα παράδειγμα ζεύγους δυνάμεων.Ένα γνήσιο ζεύγος δυνάμεων έχει σαν αποτέλεσμα μόνοπεριστροφική κίνηση, δεδομένου ότι δεν υπάρχει καμίαμη ισορροπημένη δύναμη. Στο μυοσκελετικό σύστημα,όλες αυτές οι συνθήκες σπάνια ικανοποιούνται, έτσι τακαθαρά ζεύγη δυνάμεων είναι σπάνια. Γενικά, οι μύεςείναι αρμόδιοι για την παραγωγή και των δυνάμεων καιτων ροπών, κατά συνέπεια προκαλούν τόσο τις μεταφο-ρικές όσο και τις περιστροφικές κινήσεις. Εντούτοις,υπάρχουν παραδείγματα στο ανθρώπινο σώμα στα οποίαδύο ή περισσότεροι μύες συνεργάζονται προκειμένου ναπαράγουν μια ροπή, όπως ο άνω τραπεζοειδής και ο πρό-σθιος οδοντωτός (Εικ 1.8Β). Αν και οι δυνάμεις αυτώντων μυών δεν έχουν ταυτόσημα μέτρα ή διευθύνσεις, ηπερίπτωση αυτή αναφέρεται συχνά ως ζεύγος δυνάμεων.
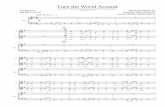
Μυϊκές ΔυνάμειςΌπως αναφέρθηκε προηγουμένως, υπάρχουν τρεις ση-μαντικές παράμετροι που πρέπει να εξετάσει κανείς σεσχέση με τη δύναμη ενός μυός: την κατεύθυνση, το μέτρο,και σημείο εφαρμογής της. Με κάποια επιφύλαξη, είναι
δυνατό να μετρηθεί η διεύθυνση και η φορά από μελέτεςσε πτώματα ή χρησιμοποιώντας απεικονιστικές τεχνικέςόπως η μαγνητικής τομογραφία (MRI) και η αξονική το-μογραφία (CT) [1,3]. Αυτές οι πληροφορίες είναι χρήσιμεςστον καθορισμό της λειτουργίας και της αποδοτικότηταςενός μυός στην παραγωγή μιας ροπής. Για παράδειγμα,δύο μύες που περιβάλλουν τη γληνοβραχιόνια άρθρωση,ο υπερακάνθιος και ο μέσος δελτοειδής, παρουσιάζονταιστο Πλαίσιο 1.2. Από τις πληροφορίες που παρέχονται γιατην έκφυση των μυών και το σημείο εφαρμογής της δύ-ναμής τους στη θέση αυτή, ο μοχλοβραχίονας δύναμηςτου δελτοειδή είναι περίπου ίσος με αυτόν του υπερακάν-θιου, ακόμα κι αν η κατάφυση του δελτοειδή στο βραχιό-νιο οστό είναι πολύ πιο απομακρυσμένη από το κέντροπεριστροφής από ότι η κατάφυση του υπερακάνθιου.
Κεφάλαιο 1 / ΕΙΣΑΓΩΓΗ ΣΤΗΝ ΕΜΒΙΟΜΗΧΑΝΙΚΗ ΑΝΑΛΥΣΗ 11
Fd
θs
Fs
rs
rd
θd
ΜΔδ = rdημ(θd) = (20 cm)ημ(5°) ≈ 2 cmMΔυ = rsημ(θs) = (2 cm)ημ(80°) ≈ 2 cm
y
x
ΠΛΑΙΣΙΟ ΑΝΑΛΥΣΗΣ ΔΥΝΑΜΕΩΝ 1.2
ΜΟΧΛΟΒΡΑΧΙΟΝΕΣ ΔΥΝΑΜΗΣ ΤΟΥ ΔΕΛΤΟ-ΕΙΔΗ (ΜΔδ) ΚΑΙ ΤΟΥ ΥΠΕΡΑΚΑΝΘΙΟΥ (MΔυ)
Κλινικός Συσχετισμός
ΜΥΪΚΕΣ ΔΥΝΑΜΕΙΣ: Εκτός από την παραγωγή ροπώνπου είναι υπεύθυνες για τη γωνιακή κίνηση (περι-στροφή), οι μύες επίσης παράγουν δυνάμεις που μπορούννα προκαλέσουν γραμμική κίνηση (μεταφορά). Αυτή ηδύναμη μπορεί να είναι μια δύναμη σταθεροποίησης ήαποσταθεροποίησης. Παραδείγματος χάρη, δεδομένουότι ο προσανατολισμός του υπερακάνθιου που παρουσιά-ζεται στο Πλαίσιο 1.2 κατευθύνεται πρώτιστα κεντρικά(προς τη μέση γραμμή), τείνει να έλξει την βραχιόνια κε-φαλή προς της ωμογλήνη. Αυτή η συμπιεστική δύναμησυμβάλλει στη σταθεροποίηση της γληνοβραχιόνιας άρ-θρωσης. Εντούτοις, δεδομένου ότι η διεύθυνση του δελτο-ειδή κατευθύνεται προς τα άνω, τείνει να παράγει μιαδύναμη αποσταθεροποίησης που μπορεί να οδηγήσει σεμια προς τα άνω μετατόπιση της βραχιόνιας κεφαλής.
Αυτές οι αναλύσεις είναι χρήσιμες, δεδομένου ότι μπορούννα εκτελεστούν ακόμα κι αν το μέγεθος της δύναμης ενόςμυός είναι άγνωστο. Εντούτοις, για να γίνει εντελώς κα-τανοητή η λειτουργία ενός μυός, το μέτρο της δύναμής τουπρέπει να είναι γνωστό. Αν και οι δυνάμεις μπορούν να με-τρηθούν με τους επεμβατικούς μετατροπείς δύναμης [13],ενοργανωμένα συστήματα αρθροπλαστικής [6], ή προσο-μοιώσεις σε μοντέλα πτωμάτων [9], δεν υπάρχει μέχρι σή-μερα καμία μη επεμβατική πειραματική μέθοδος που ναμπορεί να χρησιμοποιηθεί για τη μέτρηση της εν ζωή (invivo) δύναμης ακέραιων μυών. Συνεπώς, κάποιες βασικέςέννοιες δανεισμένες από τις παραπάνω φυσικές μεθόδουςσε πτώματα μπορούν να χρησιμοποιηθούν για την πρό-βλεψη των μυϊκών δυνάμεων. Αν και περιλαμβάνουν πολ-λές απλουστευμένες υποθέσεις, τέτοιες μέθοδοι μπορούννα είναι πολύ χρήσιμες στην κατανόηση της μηχανικής τωναρθρώσεων και παρουσιάζονται στη συνέχεια.
ΣΤΑΤΙΚΗ
Η στατική είναι η μελέτη των δυνάμεων που δρουν σε
-
ένα σώμα που είναι ακίνητο ή που κινείται με σταθερήταχύτητα. Μολονότι το ανθρώπινο σώμα σχεδόν πάνταεπιταχύνεται, η στατική ανάλυση προσφέρει μια απλήμέθοδο για την επίλυση των μυοσκελετικών προβλημά-των. Αυτή η ανάλυση μπορεί είτε να λύσει το πρόβλημαείτε να παρέχει τη βάση για μια πιο εκλεπτυσμένη δυ-ναμική ανάλυση.
Οι Νόμοι του Νεύτωνα
Μιας και το μυοσκελετικό σύστημα αποτελεί απλά μιασειρά σωμάτων που βρίσκονται σε επαφή μεταξύ τους,μερικές από τις βασικές αρχές της Φυσικής που ανέ-πτυξε ο Ισαάκ Νεύτων (1642–1727) είναι χρήσιμες.Οι Νόμοι του Νεύτωνα είναι οι ακόλουθοι:
Πρώτος νόμος: Ένα αντικείμενο παραμένει ακίνητο(ή εξακολουθεί να κινείται με σταθερή ταχύτητα)εκτός και αν δεχτεί την επίδραση εξωτερικών δυ-νάμεων των οποίων η συνισταμένη είναι διάφορητου μηδενός.
Δεύτερος νόμος: Εάν εξωτερικές δυνάμεις με συνι-σταμένη διάφορη του μηδενός δρουν σε ένα αν-τικείμενο, το αντικείμενο αποκτά επιτάχυνσηίδια με τη φορά της δύναμης και ευθέως ανάλογητης δύναμης (F = ma).
Τρίτος νόμος: Για κάθε δράση (δύναμη) υπάρχει μιααντίδραση (αντίθετη δύναμη) ίσου μέτρου καιαντίθετης φοράς.
Από τον πρώτο νόμο, είναι καθαρό ότι εάν ένα σώμαείναι ακίνητο, δεν μπορούν να δρουν πάνω του εξωτε-ρικές δυνάμεις με συνισταμένη διάφορη του μηδενός. Σεαυτή την κατάσταση, που ονομάζεται στατική ισορρο-πία, όλες οι εξωτερικές δυνάμεις που δρουν σε ένα σώμαπρέπει να έχουν άθροισμα (με τη διανυσματική έννοια)ίσο με μηδέν. Μια προέκταση του νόμου αυτού σε σώ-ματα μεγαλύτερα από στοιχειώδη είναι ότι το άθροισματων εξωτερικών ροπών που δρουν σε ένα σώμα πρέπειεπίσης να είναι ίσο με μηδέν για να είναι το σώμα ακί-νητο. Για το λόγο αυτό, για μια τρισδιάστατη ανάλυσηυπάρχουν έξι εξισώσεις που πρέπει να ικανοποιούνταιγια να υπάρχει στατική ισορροπία:
ΣFX = 0 ΣFY = 0 ΣFZ = 0
ΣMX = 0 ΣMY = 0 ΣMZ = 0 (Εξίσωση 1.9)
Για μια δισδιάστατη ανάλυση, (στο χ και ψ επίπεδο)υπάρχουν μόνο δύο επίπεδες συνιστώσες της δύναμηςκαι μια κάθετη συνιστώσα ροπής (ροπής στρέψης):
ΣFX = 0 ΣFY = 0 ΣMZ = 0 (Εξίσωση 1.10)
Υπό διάφορες συνθήκες, είναι λογικό να υποθέσει κανείςότι όλα τα μέρη του σώματος βρίσκονται σε κατάστασηστατικής ισορροπίας και αυτές οι τρεις εξισώσεις μπο-ρούν να χρησιμοποιηθούν για τον υπολογισμό κάποιωνδυνάμεων που ενεργούν στο μυοσκελετικό σύστημα.Όταν το σώμα δεν βρίσκεται σε στατική ισορροπία, ο
δεύτερος νόμος του Νεύτωνα λέει ότι η συνισταμένη τωνδυνάμεων και των ροπών είναι ανάλογες της επιτάχυν-σης του σώματος. Αυτή η περίπτωση εξετάζεται παρα-κάτω στο κεφάλαιο αυτό.
Επίλυση ΠροβλημάτωνΜια γενική προσέγγιση για την επίλυση δυνάμεων σεκατάσταση στατικής ισορροπίας είναι η ακόλουθη:
ΒΗΜΑ 1 Απομονώστε το σώμα που σας ενδιαφέρει.ΒΗΜΑ 2 Σχεδιάστε το σώμα και όλες τις εξωτερικές
δυνάμεις που δρουν σε αυτό (αναφέρεταιως διάγραμμα ελεύθερου σώματος).
ΒΗΜΑ 3 Αθροίστε τις δυνάμεις και ροπές που έχουνσυνισταμένη μηδέν
ΒΗΜΑ 4 Λύστε ως προς τις άγνωστες δυνάμεις.
Ως ένα απλό παράδειγμα, σκεφτείτε δύο σφαίρεςτου ενός κιλού που αναρτώνται από ένα σχοινί όπωςφαίνονται στο Πλαίσιο 1.3. Ποια είναι η δύναμη πουασκείται στο πάνω σχοινί; Μολονότι αυτό είναι έναπολύ απλό πρόβλημα που μπορεί να επιλυθεί με μιααπλή παρατήρηση, εδώ παρουσιάζουμε μια ολοκληρω-μένη ανάλυση. Το πρώτο βήμα είναι να γίνει η σχεδίασητου συστήματος και να σχεδιαστεί ένα διάστικτο πλαί-σιο γύρω από το σώμα που μας ενδιαφέρει. Σκεφτείτεένα πλαίσιο που εμπεριέχει τις δύο σφαίρες και μέροςτου σχοινιού πάνω από την ψηλότερη σφαίρα, όπωςφαίνεται στο Πλαίσιο 1.3.
Προχωρώντας στο δεύτερο βήμα σχεδιάζουμε το διά-γραμμα ελεύθερου σώματος. Όπως επισημαίνεται από τονπρώτο νόμο του Νεύτωνα, μόνο οι εξωτερικές δυνάμειςλαμβάνονται υπόψη στην ανάλυση αυτή. Για το παρά-δειγμά μας, οτιδήποτε βρίσκεται εντός του διάστικτουπλαισίου θεωρείται μέρος του σώματος που μας ενδιαφέ-ρει. Οι εξωτερικές δυνάμεις οφείλονται στη επαφή δύοσωμάτων, ένα μέσα στο πλαίσιο και ένα εκτός πλαισίου.
12 Μέρος Ι / ΑΡΧΕΣ ΕΜΒΙΟΜΗΧΑΝΙΚΗΣ
W
F
Διάγραμμα ελεύθερουσώματος
x
ΣF y = 0T – F – F = 0T = 2F = 2 (10N)
=10N
T = 20N
F
y
F = mg = (1 kg)(9.8 m )s2
1 Kg
1 Kg
ΠΛΑΙΣΙΟ ΑΝΑΛΥΣΗΣ ΔΥΝΑΜΕΩΝ 1.3
ΕΝΑ ΔΙΑΓΡΑΜΜΑ ΕΛΕΥΘΕΡΟΥ ΣΩΜΑΤΟΣ