Se pune problema determin rii f.d.t. echivalente H(s), …prostean/etc2.pdf · · 2013-04-03Se...
19
54 Fig. 3.3.6 Axa pulsaţiei diagramelor Bode Observaţie: Deşi axa absciselor este gradată după valorile lui lgω, se obişnuieşte ca ea să fie notată cu valorile lui ω. □ Pe ordonata c.a.p. se reprezintă valorile amplitudinii etalonate în decibeli (dB). ) ( lg 20 ) ( ) ( ω ω ω A j H A D dB dB = = (3.3.5) Pulsaţia la care are loc intersecţia dintre c.a.p. şi axa absciselor se numeşte pulsaţie de tăiere: ω t , (f t π ω 2 t = este frecvenţa de tăiere). Pe ordonata c.f.p. se reprezintă valorile defazajului în grade, această caracteristică fiind o caracteristică semilogaritmică. Caracteristicile logaritmice de frecvenţă prezintă câteva avantaje care le fac extrem de utilizate în practică, cum ar fi: • caracteristica amplitudine-pulsaţie poate fi aproximată bine şi trasată cu uşurinţă prin drepte reprezentând direcţiile asimptotice ale caracteristicii; • scara logaritmică pentru pulsaţii permite reprezentarea unui spectru mult mai larg de frecvenţă; • considerarea unităţilor logaritmice are ca efect transformarea produselor din cadrul f.d.t. în sume – ceea ce permite obţinerea c.a.p. a sistemului prin însumarea grafică a c.a.p. a subsistemelor componente. Observaţie: Forma diagramelor Bode pentru sistemele tipizate se va prezenta ulterior. 3.4 Algebra schemelor bloc Algebra schemelor bloc se referă la regulile de operare grafică din cadrul schemelor bloc. Există trei conexiuni de bază care vor fi analizate în continuare. 1. Conexiunea SERIE Cazul a două blocuri înseriate este reprezentat în Fig. 3.4.1. Fig. 3.4.1 Conexiunea serie 55 Se pune problema determinării f.d.t. echivalente H(s), corespunzătoare conexiunii serie prezentate în Fig.3.4.1. Se poate scrie, din aproape în aproape: ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( 2 1 2 1 1 2 1 2 2 2 s H s H s U s H s H s U s H s Y s H s U s Y s Y ⋅ ⋅ = ⋅ ⋅ = ⋅ = ⋅ = = Rezultă deci că pentru f.d.t. echivalentă se obţine: ) ( ) ( ) ( ) ( ) ( 2 1 s H s H s U s Y s H = = Sau, generalizând pentru ,,i” blocuri: ∏ = i i s H s H ) ( ) ( (3.4.1) Funcţia de transfer echivalentă a conexiunii serie se obţine ca produs al f.d.t. a blocurilor componente. Observaţia 1: În cadrul sistemelor multivariabile H(s) este matrice, deci trebuie ţinut cont de ordinea realizării produselor. Remarcă: Relaţia 3.4.1. este aplicabilă în cazul în care este îndeplinită proprietatea de separabilitate, adică, comportarea individuală a fiecărui subsistem fizic din cadrul conexiunii, este identică cu comportarea lui, ca şi cum ar funcţiona izolat. Exemplu: Considerând două circuite RC funcţionând în gol (Fig. 3.4.2), funcţiile de transfer corespunzătoare sunt: 1 1 1 1 ) ( ) ( ) ( 1 1 1 1 1 1 + = + = = s T s C R s U s Y s H 1 1 1 1 ) ( ) ( ) ( 2 2 2 2 2 2 + = + = = s T s C R s U s Y s H a) b) Fig.3.4.2 Circuite RC funcţionând în gol Se pune întrebarea dacă circuitul R 1 C 1 R 2 C 2 , reprezentat în Fig. 3.4.3, obţinut prin inserierea celor două circuite reprezentate în Fig.3.4.2, are f.d.t. obţinută ca produs al funcţiilor de transfer H 1 (s) respective H 2 (s), a circuitelor RC considerate izolate ? Fig. 3.4.3 Circuit R 1 C 1 R 2 C 2
-
Upload
nguyendien -
Category
Documents
-
view
223 -
download
4
Transcript of Se pune problema determin rii f.d.t. echivalente H(s), …prostean/etc2.pdf · · 2013-04-03Se...

54
Fig. 3.3.6 Axa pulsaţiei diagramelor Bode
Observaţie: Deşi axa absciselor este gradată după valorile lui lgω, se obişnuieşte ca ea să fie notată cu valorile lui ω. □
Pe ordonata c.a.p. se reprezintă valorile amplitudinii etalonate în decibeli (dB).
)(lg20)()( ωωω AjHAD
dBdB== (3.3.5)
Pulsaţia la care are loc intersecţia dintre c.a.p. şi axa absciselor se numeşte
pulsaţie de tăiere: ωt, (ft π
ω
2t= este frecvenţa de tăiere).
Pe ordonata c.f.p. se reprezintă valorile defazajului în grade, această caracteristică fiind o caracteristică semilogaritmică.
Caracteristicile logaritmice de frecvenţă prezintă câteva avantaje care le fac extrem de utilizate în practică, cum ar fi:
• caracteristica amplitudine-pulsaţie poate fi aproximată bine şi trasată cu uşurinţă prin drepte reprezentând direcţiile asimptotice ale caracteristicii;
• scara logaritmică pentru pulsaţii permite reprezentarea unui spectru mult mai larg de frecvenţă;
• considerarea unităţilor logaritmice are ca efect transformarea produselor din cadrul f.d.t. în sume – ceea ce permite obţinerea c.a.p. a sistemului prin însumarea grafică a c.a.p. a subsistemelor componente.
Observaţie: Forma diagramelor Bode pentru sistemele tipizate se va prezenta ulterior.
3.4 Algebra schemelor bloc
Algebra schemelor bloc se referă la regulile de operare grafică din cadrul
schemelor bloc. Există trei conexiuni de bază care vor fi analizate în continuare. 1. Conexiunea SERIE Cazul a două blocuri înseriate este reprezentat în Fig. 3.4.1.
Fig. 3.4.1 Conexiunea serie
55
Se pune problema determinării f.d.t. echivalente H(s), corespunzătoare conexiunii serie prezentate în Fig.3.4.1.
Se poate scrie, din aproape în aproape: )()()()()()()()()()()()( 2121121222 sHsHsUsHsHsUsHsYsHsUsYsY ⋅⋅=⋅⋅=⋅=⋅==
Rezultă deci că pentru f.d.t. echivalentă se obţine:
)()()(
)()( 21 sHsH
sU
sYsH ==
Sau, generalizând pentru ,,i” blocuri:
∏=i
i sHsH )()( (3.4.1)
Funcţia de transfer echivalentă a conexiunii serie se obţine ca produs al f.d.t. a blocurilor componente. Observaţia 1: În cadrul sistemelor multivariabile H(s) este matrice, deci trebuie ţinut cont de ordinea realizării produselor. Remarcă: Relaţia 3.4.1. este aplicabilă în cazul în care este îndeplinită proprietatea de separabilitate, adică, comportarea individuală a fiecărui subsistem fizic din cadrul conexiunii, este identică cu comportarea lui, ca şi cum ar funcţiona izolat.
Exemplu: Considerând două circuite RC funcţionând în gol (Fig. 3.4.2), funcţiile de transfer corespunzătoare sunt:
1
1
1
1
)(
)()(
1111
11
+=
+==
sTsCRsU
sYsH
1
1
1
1
)(
)()(
2222
22
+=
+==
sTsCRsU
sYsH
a) b)
Fig.3.4.2 Circuite RC funcţionând în gol
Se pune întrebarea dacă circuitul R1C1R2C2, reprezentat în Fig. 3.4.3, obţinut prin inserierea celor două circuite reprezentate în Fig.3.4.2, are f.d.t. obţinută ca produs al funcţiilor de transfer H1(s) respective H2(s), a circuitelor RC considerate izolate ?
Fig. 3.4.3 Circuit R1C1R2C2
56
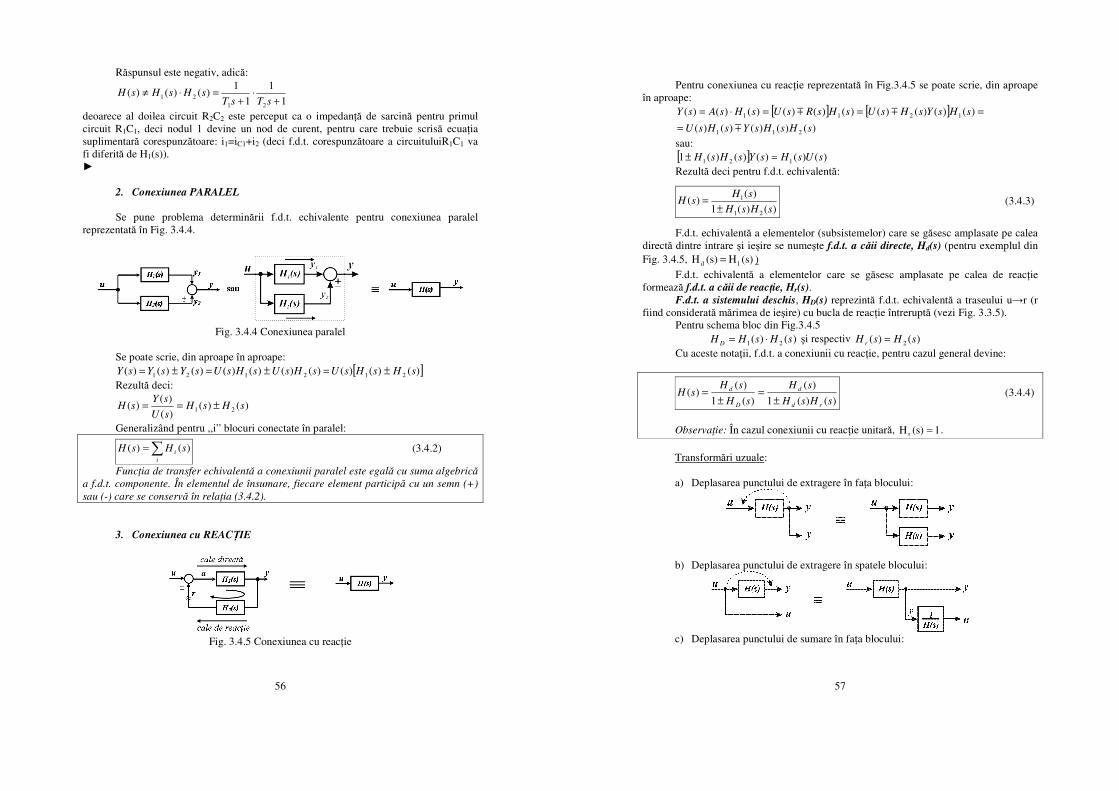
Răspunsul este negativ, adică:
1
1
1
1)()()(
2121
+⋅
+=⋅≠
sTsTsHsHsH
deoarece al doilea circuit R2C2 este perceput ca o impedanţă de sarcină pentru primul circuit R1C1, deci nodul 1 devine un nod de curent, pentru care trebuie scrisă ecuaţia suplimentară corespunzătoare: i1=iC1+i2 (deci f.d.t. corespunzătoare a circuituluiR1C1 va fi diferită de H1(s)). ►
2. Conexiunea PARALEL
Se pune problema determinării f.d.t. echivalente pentru conexiunea paralel reprezentată în Fig. 3.4.4.
Fig. 3.4.4 Conexiunea paralel
Se poate scrie, din aproape în aproape:
[ ])()()()()()()()()()( 212121 sHsHsUsHsUsHsUsYsYsY ±=±=±= Rezultă deci:
)()()(
)()( 21 sHsH
sU
sYsH ±==
Generalizând pentru ,,i” blocuri conectate în paralel:
∑=i
i sHsH )()( (3.4.2)
Funcţia de transfer echivalentă a conexiunii paralel este egală cu suma algebrică a f.d.t. componente. În elementul de însumare, fiecare element participă cu un semn (+) sau (-) care se conservă în relaţia (3.4.2).
3. Conexiunea cu REACŢIE
Fig. 3.4.5 Conexiunea cu reacţie
57
Pentru conexiunea cu reacţie reprezentată în Fig.3.4.5 se poate scrie, din aproape în aproape:
[ ] [ ])()()()()(
)()()()()()()()()()(
211
1211
sHsHsYsHsU
sHsYsHsUsHsRsUsHsAsY
m
mm
=
===⋅=
sau: [ ] )()()()()(1 121 sUsHsYsHsH =± Rezultă deci pentru f.d.t. echivalentă:
)()(1
)()(
21
1
sHsH
sHsH
±= (3.4.3)
F.d.t. echivalentă a elementelor (subsistemelor) care se găsesc amplasate pe calea directă dintre intrare şi ieşire se numeşte f.d.t. a căii directe, Hd(s) (pentru exemplul din Fig. 3.4.5, (s)H(s)H 1d = )
F.d.t. echivalentă a elementelor care se găsesc amplasate pe calea de reacţie formează f.d.t. a căii de reacţie, Hr(s).
F.d.t. a sistemului deschis, HD(s) reprezintă f.d.t. echivalentă a traseului u→r (r fiind considerată mărimea de ieşire) cu bucla de reacţie întreruptă (vezi Fig. 3.3.5).
Pentru schema bloc din Fig.3.4.5 )()( 21 sHsHH D ⋅= şi respectiv )()( 2 sHsH r =
Cu aceste notaţii, f.d.t. a conexiunii cu reacţie, pentru cazul general devine:
)()(1
)(
)(1
)()(
sHsH
sH
sH
sHsH
rd
d
D
d
±=
±= (3.4.4)
Observaţie: În cazul conexiunii cu reacţie unitară, 1(s)H r = .
Transformări uzuale: a) Deplasarea punctului de extragere în faţa blocului:
b) Deplasarea punctului de extragere în spatele blocului:
c) Deplasarea punctului de sumare în faţa blocului:

58
±=±=
)(
)()()()()()( 2
121 sH
sUsUsHsUsHsUY
d) Deplasarea punctului de sumare în spatele blocului: [ ] )()()()()()()()( 2121 sUsHsUsHsUsUsHsY ±=±=
Exemplul 1:
Fie SRA reprezentat în schema bloc din Fig.3.4.6:
Fig. 3.4.6
Observaţia 1: În schema bloc, pe căile în care nu apar semne în punctele de sumare, se consideră semnul (+). Observaţia 2: Pentru a se putea aplica regulile algebrei schemelor bloc, trebuie ca toate conexiunile să fie independentizate (adică să nu existe încrucişări). □
Se cere să se determine f.d.t. echivalentă utilizând algebra schemelor bloc. R.
Operând transformările reprezentate cu linie punctată, Fig.3.4.6 devine:
ecuaţia sumatorului
59
Fig. 3.4.7
unde: )()()( 4334 sHsHsH ⋅= - serie ; )(1)( 66 sHsH +=′ - paralel ;
)(1
)()(
1
11 sH
sHsH
+=′ - reacţie ; )()()( 2
112 sHsHsH ⋅=′ − - serie ;
Operând în continuare se ajunge la Fig.3.4.8, în care: )()()( 2112 sHsHsH ′′⋅′=
)(1)( 22 sHsH ′+=′′
Fig. 3.4.8
sau:
Fig. 3.4.9
unde:
)()(1
)()(
345
3435 sHsH
sHsH
⋅−=
Rezultă că schema bloc iniţială (Fig. 3.4.6) poate fi înlocuită printr-un singur bloc având funcţia de transfer:
)()()()(1
1)()()( '
61343512
3512 sHsHsHsH
sHsHsH ⋅⋅⋅+
⋅⋅=−
□

60
Exemplul 2: Să se determine f.d.t. echivalentă schemei bloc din Fig. 3.4.10:
Fig. 3.4.10
R.
Operând transformările reprezentate cu linie punctată, se ajunge la Fig.3.4.11.
Fig. 3.4.11
în care:
)()(1
)()(
53
31
sHsH
sHsH
+= ;
)(1
)()(
1
12
sH
sHsH
+= ; 1
)(
)()(
1
23 +=sH
sHsH ;
)()()( 414 sHsHsH ⋅= ; 1)(
1)(
45 +=
sHsH ;
Deci, în final:
Fig. 3.4.12
Rezultă: )()()( 56 sHsHsH ⋅= , unde )()()(1
)()()()(
432
4326
sHsHsH
sHsHsHsH
⋅⋅+
⋅⋅=
□
61
Rezumat – Capitolul 3
� Forma generală a MM-II, pentru sisteme monovariabile continue şi invariante este ecuaţia diferenţială cu coeficienţi constanţi:
� ∑∑==
=m
j
jjj
n
i
iii tybtya
0
)(
0
)( )()(
� pentru sisteme fizic realizabile n>m, n – ordinul sistemului. � Pentru un sistem continuu, monovariabil, forma standard a MM-ISI este:
� )()()(
)0(;)()()(
tdutxcty
xtbutxAtxT +=
+=&
� Vectorul de stare: � x(t)=[x1(t) x2(t) … xn(t)]
T caracterizează starea internă a sistemului la un moment dat, conţine
informaţia despre istoria trecută şi prezentă a sistemului şi pe baza lui, pentru o mărime de intrare precizată, se poate determina evoluţia viitoare a ieşirii sistemului.
� Funcţia de transfer a unui sistem liniar, continuu şi monovariabil, notată cu H(s), se defineşte ca raport dintre imaginea Laplace a mărimii de ieşire Y(s) şi imaginea Laplace a mărimii de intrare U(s), sistemul fiind considerat în condiţii iniţiale nule (CI=0).
� )(
)(
)(
)()(
0
0
01
01
0 sA
sB
sa
sb
asasa
bsbsb
sU
sYsH
n
i
ii
m
j
jj
nn
mm
CI
==+++
+++==
∑
∑
=
=
=
∆
L
L
� Rădăcinile numărătorului f.d.t. reprezintă zerourile sistemului, se obţin ca soluţii ale ecuaţiei:
� ∑=
==m
j
jj sbsB
0
0)(
şi se notează cu zj. � Polinomul de la numitorul funcţiei de transfer
� ∑=
=n
i
ii sasA
0
)(
se numeşte polinom caracteristic al sistemului, iar 0A(s) = reprezintă ecuaţia caracteristică a sistemului.
� Rădăcinile ecuaţiei caracteristice se numesc polii sistemului, sau valorile proprii ale sistemului (se obţin ca soluţii ale ecuaţiei A(s)=0), şi se notează cu pi.
� Ordinul “n” al polinomului caracteristic defineşte ordinul sistemului. Pentru sisteme fizic realizabile n>m.

62
� F.d.t. poate fi calculată pornind de la MM-ISI utilizând următoarea relaţie de calcul:
� dbAsIesU
sYsH T +−== −1][
)(
)()(
� În cazul sistemelor MIMO, locul f.d.t. este luat de matricea de transfer � Forma standard a sistemelor de tip PT2 este
� )()()(2)( )1()2(2 tKutytTytyT =++ ξ sau ţinând cont de faptul că T/10 =ω
� )()()(2)( 20
20
)1(0
)2( tuKtytyty ωωξω =++
� Obţinerea caracteristicii de frecvenţă se face înlocuind formal în funcţia de transfer pe s cu jω. H(jω) este un vector complex numit caracteristica răspuns la frecvenţă sau funcţia răspuns la frecvenţă a sistemului.
� Locul geometric descris de vârful vectorului complex H(jω) pentru variaţia pulsaţiei de la –∞ la +∞ poartă denumirea de hodograf sau loc de transfer al sistemului.
� Caracteristicile logaritmice de frecvenţă (diagramele Bode) reprezintă un ansamblu de două caracteristici: caracteristica amplitudine-pulsaţie (c.a.p.) şi respectiv caracteristica fază-pulsaţie (c.f.p.) care se reprezintă pe acelaşi grafic având axa ordonatelor comună.
� Definiţia decibelului:
� )(lg20)()( ωωω AjHAD
dBdB==
� Decada reprezintă intervalul de înzecire a pulsaţiei. � Pulsaţia la care are loc intersecţia dintre c.a.p. şi axa absciselor se numeşte
pulsaţie de tăiere: ωt, (ft π
ω
2t= este frecvenţa de tăiere).
� F.d.t. a conexiunii cu reacţie, pentru cazul general devine:
� )()(1
)(
)(1
)()(
sHsH
sH
sH
sHsH
rd
d
D
d
±=
±=
63
Întrebări recapitulative pentru Capitolul 3
� În ce constă problema modelării sau identificării sistemelor şi care sunt căile de abordare?
� Specificaţi forma generală a MM-II şi precizaţi algoritmul de determinare a lui.
� Comentaţi noţiunea de vector de stare. � Specificaţi forma generală a MM-ISI pentru cazurile SISO şi MIMO şi
precizaţi algoritmul de determinare a lui. � Ce se înţelege prin forma canonică a unui sistem? � Definiţi funcţia de transfer (f.d.t.) şi explicitaţi forma ei generală. � Specificaţi relaţia de calcul a f.d.t. pornind de la MM-ISI. � Ce reprezintă matricea de transfer şi cum se defineşte ea? � Precizaţi formele standard ale MM-II pentru sistemele de tip PT2 şi
respectiv f.d.t. � Ce tip de semnal de intrare trebuie utilizat pentru a obţine caracterizarea
comportării sistemelor în domeniul frecvenţelor? � Cum se obţine caracteristica răspuns la frecvenţă a unui sistem? � Ce se înţelege prin hodograf şi care este algoritmul de construcţie a lui? � Precizaţi schema unui montaj experimental utilizat pentru ridicarea
caracteristicilor de frecvenţă. � Care sunt caracteristicile logaritmice de frecvenţă (diagramele Bode), şi
care sunt unităţile pe cele două axe? � Definiţi decibelul şi respectiv decada. � Ce reprezintă pulsaţia de frângere şi respectiv pulsaţia de tăiere? � Scrieţi relaţia de calcul a f.d.t. a conexiunii cu reacţie, pentru cazul general.

64
CAPITOLUL 4
Probleme de analiză a sistemelor
4.1 Determinarea răspunsului sistemelor la semnale de intrare
tipizate (calculul regimurilor tranzitorii)
Din punctul de vedere al analizei comportării sistemelor (proceselor) interesează cum răspunde sistemul (evoluţia ieşirii lui) pentru anumite tipuri de semnale aplicate la intrare.
Problema determinării evoluţiei ieşirii reprezintă de fapt problema determinării soluţiei ecuaţiei diferenţiale (3.1.1), care reprezintă forma generală a MM-II în domeniul timp, în cazul particularizării unei anumite mărimi de intrare u(t).
În cadrul abordării sistemice, această problemă se rezolvă într-o manieră aplicativă, pornind de la relaţia de definiţie a funţiei de transfer.
Ieşirea sistemului, în operaţional, poate fi calculată ca: )()()( sUsHsY ⋅= (4.1.1)
Deci, pentru răspunsul în domeniul timp se obţine:
=)(ty L =− )(1 sY L )()(1 sUsH ⋅− (4.1.2)
Transformata inversă Laplace a produsului a două funcţii imagine este dată de integrala de convoluţie (vezi Anexa 1):
∫ ∫∞ ∞
−=−=0 0
τ)u(τ)dτh(tτ)dτ)u(th(τy(t) (4.1.3)
Determinarea lui y(t) se efectuează însă în general calculând transformata inversă (4.1.2), utilizând tehnicile descompunerii în fracţii simple.
Pentru a putea compara comportările (dinamicile) diverselor sisteme/ procese, se utilizează anumite tipuri de semnale de intrare (semnale de intrare tipizate). În principal, pentru analiza în domeniul timp, se utilizează două astfel de semnale de intrare:
a) impulsul Dirac (impulsul unitar) Se defineşte ca:
=
≠
=∞
=
∫∞
∞−
1)(
0;0
0;
)(
dtt
t
t
t
δ
δ (4.1.4)
Fig. 4.1.1 Impulsul Dirac
L 1)( =tδ
65
Răspunsul unui sistem pentru un semnal de intrare de tip impuls Dirac poartă denumirea de funcţie pondere.
Ţinând cont de (4.1.2) şi (4.1.4): =)(ty L )()(1 thsH =− (4.1.5)
adică, funcţia pondere se poate calcula ca transformata inversă a funcţiei de transfer. Exemplu:
Să se determine funcţia pondere pentru un sistem de tip PT1. (de ex. reţeaua RC funcţionând în gol). R. Se ştie că funcţia de transfer în acest caz are expresia (vezi 3.1.8):
1)(
+=
Ts
KsH
Funcţia pondere corespunzătoare se calculează în modul următor:
=)(th L KTs
K=
+−
11
L T
t
eT
K
Ts
T −− =
+1
11 (4.1.6)
având în vedere că (vezi Anexa 1):
Late
as−− =
+
11 (4.1.7)
Graficul funcţiei pondere obţinute este reprezentat în Fig 4.1.2.
Fig. 4.1.2 Graficul funcţiei pondere
►
b) treapta unitară
Se defineşte ca:
<
≥=− 0;0
0;1)(1 t
ttu (4.1.8)
Ls
tu1
)(1 =−
Fig. 4.1.3 Treapta unitară Răspunsul unui sistem pentru o intrare de tip treaptă unitară poartă denumirea de
răspuns indicial sau funcţie indicială.
66
Exemplu: Să se determine răspunsul indicial pentru un sistem de tip PT1.
R.
=)(ty L =s
sH1
)(1-L K
sTs
K=
+ )1(1-
L =+
+−
)1(
11-
Tss
TsTs (4.1.8-1)
K= L
−=
+−
− Tt
eKTs
T
s1
1
11-
(ţinând cont de definiţia treptei unitare şi respectiv de 4.1.7) Se observă că:
Kyy(t)limt
== ∞∞→
, reprezintă valoarea de stabilizare.
Răspunsul indicial (4.1.8-1) este reprezentat în Fig. 4.1.4.
Fig. 4.1.4 Răspunsul indicial al unui sistem de tip PT1
► Graficul funcţiei indiciale reprezintă o altă posibilitate (frecvent utilizată) de a
reprezenta informaţia privind dinamica sistemului în interiorul schemei bloc. Astfel, pentru exemplul considerat al sistemului de tip PT1, reprezentarea sub
formă de schemă bloc poate fi realizată în următoarele moduri:
Fig. 4.1.5 Schema bloc a unui sistem de tip PT1
K şi T se înlocuiesc cu valorile lor numerice, concrete, pentru aplicaţia considerată. □ Observaţie: Semnalele de tip impuls Dirac şi respectiv treaptă unitate reprezintă semnale ideale, care nu pot fi generate ca atare în practică. Semnalele fizic realizabile nu pot prezenta variaţii bruşte sau discontinuităţi. Deşi relaţiile de bază sunt calculate pe baza semnalelor ideale, ele rămân valabile şi în cazul semnalelor reale, având în vedere că, constantele de timp ale proceselor reale sunt mult mai mari decât timpii de creştere a semnalelor prezentate.
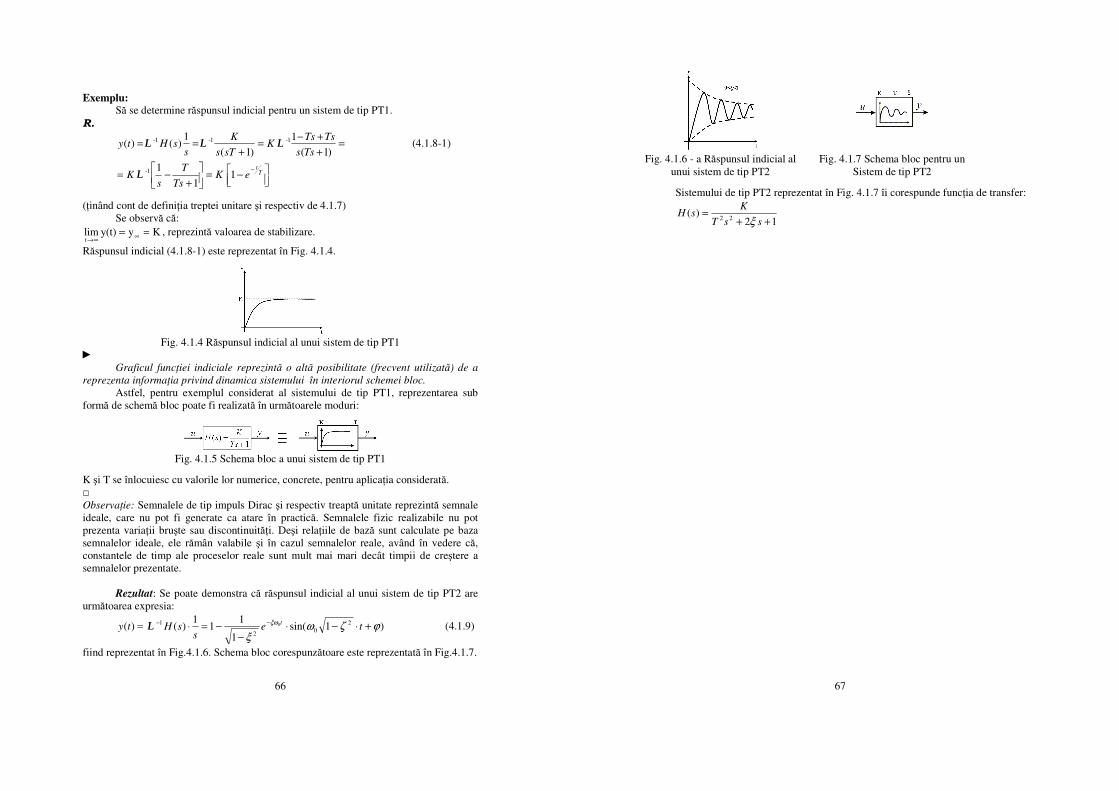
Rezultat: Se poate demonstra că răspunsul indicial al unui sistem de tip PT2 are următoarea expresia:
=)(ty L )1sin(1
11
1)( 2
02
1 0 ϕζωξ
ξω +⋅−⋅−
−=⋅ −− tes
sH t (4.1.9)
fiind reprezentat în Fig.4.1.6. Schema bloc corespunzătoare este reprezentată în Fig.4.1.7.
67
Fig. 4.1.6 - a Răspunsul indicial al unui sistem de tip PT2
Fig. 4.1.7 Schema bloc pentru un Sistem de tip PT2
Sistemului de tip PT2 reprezentat în Fig. 4.1.7 îi corespunde funcţia de transfer:
12)(
22 ++=
ssT
KsH
ξ

68
Rezumat – Capitolul 4
� Răspunsul unui sistem în domeniul timp se obţine cu:
=)(ty L =− )(1 sY L )()(1 sUsH ⋅−
� Răspunsul unui sistem pentru un semnal de intrare de tip impuls Dirac
poartă denumirea de funcţie pondere, care se poate calcula ca:
=)(ty L )()(1 thsH =−
� Răspunsul unui sistem pentru o intrare de tip treaptă unitară poartă
denumirea de impuls indicial sau funcţie indicială.
Întrebări recapitulative pentru Capitolul 4
� Specificaţi o posibilitate de a calcula răspunsul unui sistem în domeniul
timp pe baza funcţiei de transfer şi a semnalului aplicat în intrare.
� Ce reprezintă funcţia pondere şi cum se poate calcula?
� Ce reprezintă răspunsul indicial (sau funcţia indicială)?
� Specificaţi două posibilităţi de a reprezenta informaţia privind dinamica
sistemului în interiorul schemei bloc.
� Reprezentaţi schema bloc a unui sistem de tip PT2.
71
CAPITOLUL 5
Sisteme tipizate
5.1 Forma generală a funcţiei de transfer a unui sistem liniar de ordin n Expresia funcţiei de transfer pentru un sistem liniar de ordin n este dată de relaţia
(3.2.3). În cazul în care f.d.t. are zero-uri şi poli reali, complex conjugaţi şi respectiv în origine, f.d.t. poate fi rescrisă într-o formă generală:
∏∏
∏∏
==
==
+++
+++
=ba
ba
n
l
n
i
m
q
m
j
s
KsH
1ll
22l
1i
α
1qq
22q
1j
)1sT2ξsT()1sT(
)1sT2ξsT()1sT(
)( (5.1.1)
în care: • K - coeficientul de transfer al sistemului • α>0 evidenţiază prezenţa polilor în origine • α<0 evidenţiază prezenţa zerourilor în origine • polinoamele de ordin 1 generează polii, respectiv rezourile reale,
Ti, ani ,1= , Tj, amj ,1= sunt constantele de timp ale sistemelor de ordin 1 (de
temporizare, respectiv de anticipare) • polinoamele de ordin 2 generează polii respectiv zerourile complex conjugate
b0l
l n 1,l ;ω
1T == , b
0gq m 1,q ;ω
1T == reprezintă constantele de timp ale sistemelor de
ordin 2 (de temporizare, respectiv de anticipare) ω0g şi ω0l – pulsaţiile naturale (proprii) ale sistemelor
ξl, bn 1,l = , ξq, bm 1,q = – reprezintă factori de amortizare
ma+mb=m α+na+nb=n
F.d.t. (5.1.1) poate fi rescrisă funcţie de ω0 (ţinând cont de relaţia 0
1
ω=T ).
Factorii din componenţa formei generale (5.1.1) pot fi interpretaţi ca funcţii de transfer ale unor subsisteme (elemente) tipizate.
Dacă se cunosc diagramele Bode ale subsistemelor tipizate, se pot construi cu uşurinţă diagramele Bode pentru orice sistem (cu o f.d.t. de forma (5.1.1), prin însumarea grafică a diagramelor Bode a subsistemelor componente (deoarece sunt caracteristici logaritmice).
72
5.2 Amplificatorul operaţional integrat ca suport de realizare
a regulatoarelor liniare cu acţiune continuă Amplificatorul operaţional (AO) este un amplificator de curent continuu, care în cazul
ideal se caracterizează prin: - amplificare de tensiune infinită în buclă deschisă (fără reacţie), (Au = ∞) - rezistenţă de intrare Ri infinită (Ri = ∞) - rezistenţă de ieşire Re nulă (Re = 0) Tehnica circuitelor integrate permite obţinerea unor AO liniare care aproximează
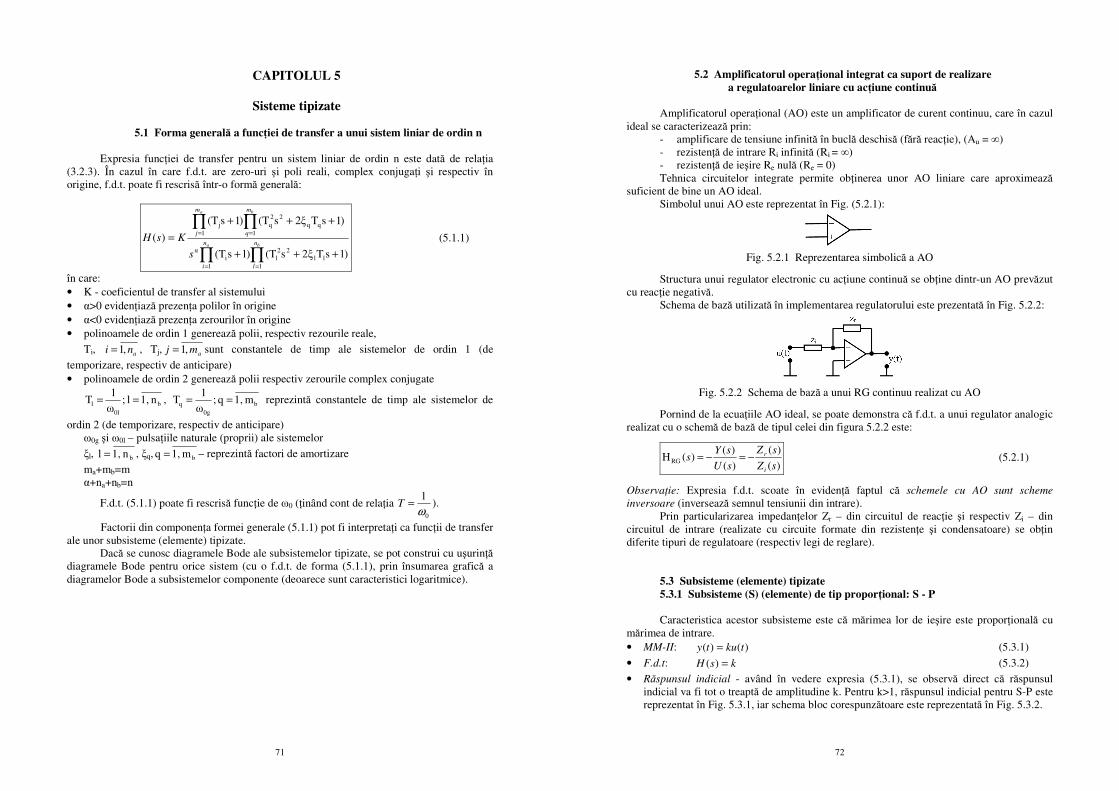
suficient de bine un AO ideal. Simbolul unui AO este reprezentat în Fig. (5.2.1):
Fig. 5.2.1 Reprezentarea simbolică a AO
Structura unui regulator electronic cu acţiune continuă se obţine dintr-un AO prevăzut cu reacţie negativă.
Schema de bază utilizată în implementarea regulatorului este prezentată în Fig. 5.2.2:
Fig. 5.2.2 Schema de bază a unui RG continuu realizat cu AO
Pornind de la ecuaţiile AO ideal, se poate demonstra că f.d.t. a unui regulator analogic realizat cu o schemă de bază de tipul celei din figura 5.2.2 este:
)(
)(
)(
)()(HRG sZ
sZ
sU
sYs
i
r−=−= (5.2.1)
Observaţie: Expresia f.d.t. scoate în evidenţă faptul că schemele cu AO sunt scheme inversoare (inversează semnul tensiunii din intrare).
Prin particularizarea impedanţelor Zr – din circuitul de reacţie şi respectiv Zi – din circuitul de intrare (realizate cu circuite formate din rezistenţe şi condensatoare) se obţin diferite tipuri de regulatoare (respectiv legi de reglare).
5.3 Subsisteme (elemente) tipizate
5.3.1 Subsisteme (S) (elemente) de tip proporţional: S - P Caracteristica acestor subsisteme este că mărimea lor de ieşire este proporţională cu
mărimea de intrare. • MM-II: )()( tkuty = (5.3.1)
• F.d.t: ksH =)( (5.3.2)
• Răspunsul indicial - având în vedere expresia (5.3.1), se observă direct că răspunsul indicial va fi tot o treaptă de amplitudine k. Pentru k>1, răspunsul indicial pentru S-P este reprezentat în Fig. 5.3.1, iar schema bloc corespunzătoare este reprezentată în Fig. 5.3.2.

73
Fig. 5.3.1 Răspuns indicial pentru S-P Fig. 5.3.2 Schema bloc a unui S-P
● hodograful:
[ ] [ ] )()()(Im)(Re)()( ωωωωωω jQPjHjjHkjHksH js +=+== →= = Rezultă că: P(ω)=k, Q(ω)=0, hodograful reducându-se la un punct pe axa reală(Fig. 5.3.3)
Fig. 5.3.3 Hodograful S-P
● diagramele Bodé (caracteristicile logaritmice de frecvenţă)
kkjHA lg20)()( dBdBdB=== ωω
0)(
)()( ==
ω
ωωϕ
P
Qarctg
Rezultă deci că pentru S-P contribuţia în fază este nulă. Diagramele Bode sunt reprezentate în Fig. 5.3.4.
Fig. 5.3.4 Diagramele Bode ale S-P
Exemple de S-P:
- Regulatorul de tip proporţional, RG-P realizat cu AO (Fig. 5.3.5):
Fig. 5.3.5 R-P realizat cu AO
Ambele impedanţe (din intrarea şi reacţia AO) sunt particularizate prin rezistenţe. F.d.t: Considerând relaţia 5.2.1 se poate scrie:
74
RKR
RsH =−=
1
2)( , cu 1
2
R
RKR −= ; (5.3.3)
Având în vedere amplasamentul regulatorului în schema bloc (vezi Fig. 5.3.6)
Fig. 5.3.6 Schema bloc a RG-P
Legea de reglare de tip P: a(t)K(t)u RC = (5.3.4)
► - Alte exemple de S-P sunt reprezentate în Fig.5.3.7
a) Angrenaj cu roţi dinţate b) Mecanism de deplasare a acului indicator a
unui aparat
Fig. 5.3.7 Exemple de S-P
► 5.3.2 Subsisteme (elemente) de tip proporţional cu temporizare
(întârziere) de ordinul 1: S-PT1
Exemple de S-PT1: - Circuit RL - serie (Fig.5.3.8)
Fig.5.3.8 Circuit RL - serie Fig.3.5.9 Circuit RC - serie Fig.5.3.10 Termocuplu
Pentru circuitul RL - serie se poate scrie (Kirchoff):
)()()(
tutRidt
tdiL i=+ ;
MM-II devine (pentru alegerea variabilelor terminale conform Fig. 5.3.8: u=ui; y=i ):
KuyyT =+& ; T
LT = ,
RK
1= ;
► - Circuit RC - serie (Fig.5.3.9)
Se poate scrie (Kirchoff):
75
iCC uu
dt
duRC =+
MM-II: considerând iuu = ; Cuy = rezultă: uyyT =+& ; RCT = ;
► - Termocuplul (Fig.5.3.10)
MM-II: θ=+ ee uuT & sau cu θ=u şi euy = : uyyT =+&
unde: θ – temperatură ue – tensiune electromotoare
► Rezultă că pentru S-PT1:
● MM-II: )()()( tutytyT =+& (5.3.5)
● f.d.t.: 1
)(+
=Ts
KsH
(5.3.6) ●Răspunsul indicial şi reprezentarea prin schema bloc a unui S-PT1 (vezi relaţia 4.1.8
şi respectiv Fig.4.1.4).
Fig.5.3.11 Schema bloc a S-PT1
● hodograful:
)()(111
)()(2222
ωωω
ω
ωωω
ωjQP
T
KTj
T
K
Tj
KjHsH
js−=
+−
+=
+=→
=
Calculând P(ω) şi Q(ω) pentru valori semnificative ale lui ω, se completează tabelul din Fig.5.3.12-a), pe baza căruia se construieşte hodograful din Fig.5.3.12-b) (vezi paragraful 3.3).
ω P(ω) Q(ω)
0 K 0
∞ 0 0
T
1=ω
2
K
2
K−
a) b)
Fig.5.3.12 Hodograful S-PT1 ● Diagramele Bodé:
1lg20
1lg20)(
22 +=
+=
ωωω
T
K
Tj
KjH
dB
C.a.p. se construieşte pentru direcţii asimptotice (pentru ω foarte mic, respectiv pentru ω foarte mare).
Astfel, pentru:
KjHT dB
lg20)()1
( 1T 22 ≅⇒<<<< ωωω ,
76
care reprezintă ecuaţia unei drepte paralele cu axa pulsaţiilor.
ωωω
ωωω lg20constlg20lg20lg20lg20)()1
( 1T 22 −=−−=≅⇒>>>> TKT
KjH
T dB
care reprezintă ecuaţia unei drepte de pantă -20dB/dec, deoarece
dB/dec 20lg
)(−=
ω
ω
d
jHddB
Punând condiţia de intersectare a celor două drepte de aproximare, rezultă că intersecţia are loc pentru pulsaţia ωf=1/T, numită pulsaţie de frângere.
ωlg20lg20lg20lg20 −−= TKK
Tf
1=⇒ω (5.3.7)
C.a.f. se obţine ţinând cont că:
))
)arctg(Tω
P(ω
Q(ωarctg(ωω −=−=ϕ
Dând valori semnificative lui ω rezultă: ω 0 1/T ∞
φ 0 -45˚ -90˚ Corespunzător, diagramele Bodé sunt reprezentate în Fig.5.3.13
Fig.5.3.13 Diagramele Bode ale S-PT1 Observaţia 1: Se observă că faza (defazajul) rămâne tot timpul negativă (variază între
0 şi -90˚) – adică ieşirea este defazată în urma intrării, rezultând denumirea de temporizare sau întârziere (PT1).
Observaţia 2: Diagramele Bodé prezentate în Fig.5.3.13 corespund unei f.d.t. de tipul (5.3.4), care
poate fi scrisă ca:
)()(1
1)( 21 sHsH
TsKsH ⋅=
+⋅=
adică poate fi obţinută ca produs dintre 2 f.d.t.: • KsH =)(1 - corespunzând unui S-P, şi respectiv
• 1
1)(2
+=
TssH corespunzând unui S-PT1.

77
Reprezentând pe acelaşi grafic diagramele Bode respective (Fig.5.3.14) şi însumându-le grafic, se obţin caracteristicile din Fig.5.3.13. Se observă că efectul sumării c.a.p. corespunzătoare lui H1(s) şi H2(s) este similar cu deplasarea în jos a axei absciselor cu 20lgK. C.f.p. rămâne neschimbată având în vedere că, pentru S-P contribuţia de fază este nulă.
Fig.5.3.14 Însumarea grafică a c.a.p.
5.3.3 Subsisteme (elemente) de tip proporţional cu temporizare
de ordinul 2: S – PT2
• MM-II: KuyTyyT =++ )1()2(2 2ξ (5.3.8)
• f.d.t.: 122
)(222
002
20
++≡
++=
TssT
K
ss
KsH
ξωξω
ω;
0
1
ω=T (5.3.9)
unde: K – coeficient de transfer
ξ – factor de amortizare ω0 – pulsaţia naturală Schema bloc a S-PT2 este reprezentată în Fig.5.3.15 (pentru 0< ξ <1)
Fig.5.3.15 Schema bloc a unui S-PT2 (0 < ξ <1)
• Diagramele Bodé – sunt prezentate în Fig. 5.3.16.
78
Fig. 5.3.16 Diagramele Bode ale S-PT2
Se observă ca panta dreptei de aproximare a c.a.p. este de -40dB/dec (dublă faţă de cazul S-PT1), iar c.f.p. variază de la 0 la -180˚ (faţă de -90˚ din cazul S-PT1).
Circuitul RLC-serie considerat în ex. 1 şi respectiv sistemul mecanic în translaţie din ex.2 din paragraful 3.2.3 reprezintă exemple de S-PT2.
5.3.4 Subsisteme (elemente) de tip integrator (S-I)
Pentru această categorie de sisteme, mărimea de ieşire reprezintă integrala mărimii de
intrare.
• MM-II: ∫=t
i
duT
ty0
)(1
)( ττ ; Ti – constanta de timp de integrare; (5.3.10)
• F.d.t.: sT
sHi
1)( = ; (5.3.11)
• Răspunsul indicial: Considerând mărimea de intrare o treaptă de amplitudine A: u(t) = Au-1(t),
mărimea de ieşire corespunzătoare devine:
( ) A)y(T)y(T
tA))y((dτ
T
Ay(t) i
i
t
i
=⇒+⋅
=+= ++∫ 000
(5.3.12)
adică, constanta timp de integrare Ti reprezintă timpul în decursul căruia mărimea de ieşire înregistrează o variaţie egală cu mărimea de intrare când aceasta variază în treaptă.
Răspunsul indicial şi schema bloc a unui S-I sunt reprezentate în Fig.5.3.17.
a)
b)
Fig.5.3.17 Răspunsul indicial (a) şi schema bloc (b) a unui S-I
79
• Hodograful: 0)(11
)()(
)(
=⇒−==→=
ωωω
ω
ω
ω
PT
jTj
jHsH
Q
iijs321
Hodograful corespunzător este reprezentat în Fig.5.3.19. Se observă că hodograful se suprapune peste axa negativă a ordonatei, ceea ce
înseamnă că faza este constantă şi egală cu -90˚.
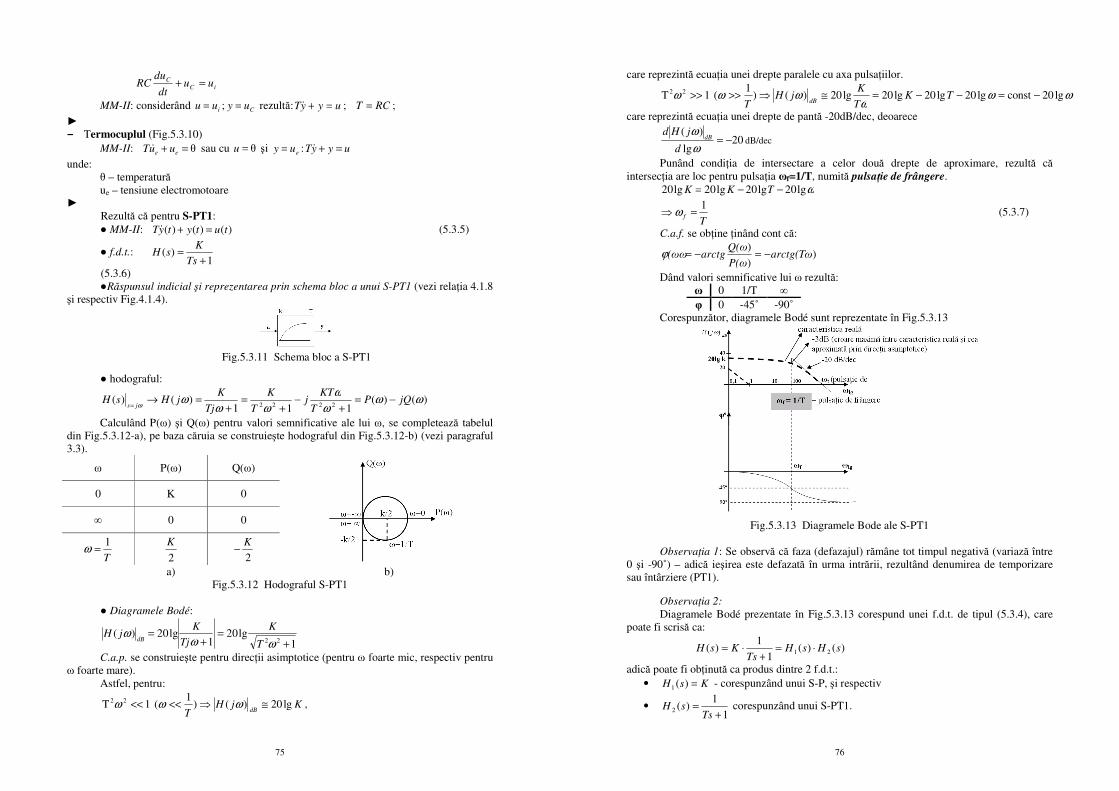
Fig.5.3.19 Hodograf S-I Fig.5.3.20 Diagramele Bode S-I
• Diagramele Bode: c.a.p. respectiv c.f.p. sunt reprezentate în Fig.5.3.20 c.a.p. – reprezintă o dreaptă cu panta de ,,-20 dB/dec“ care intersectează axa pulsaţiilor
(abscisa) într-un punct corespunzător pulsaţiei de tăiere: ωt=1/Ti. c.f.p. – este o paralelă la axa pulsaţiilor, pentru valoarea defazajului de ,,-90˚“.
Exemplu:
- Regulatorul de tip integrator: RG-I realizat cu AO
Fig.5.3.18 Regulator I realizat cu AO
Legea de reglare a RG-I: ∫=t
ic da
Ttu
0)(
1)( ττ (5.3.13)
f.d.t.: sT
sHi
1)( = , cu RCTi −= (5.3.14)
Observaţie: f.d.t. se poate obţine direct aplicând relaţia 5.2.1:
sTRCsR
sC
sZ
sZsH
ii
r 11/1
)(
)()( =−=−=−= , ( RCTi −= )
►
5.3.5 Subsisteme (elemente) de tip derivativ: S-D La aceste tipuri de elemente, mărimea de ieşire se obţine (din punct de vedere
matematic) prin derivarea funcţiei mărimii de intrare. S-D se caracterizează prin faptul că pentru a furniza un semnal la ieşire este necesar să existe o variaţie a mărimii de intrare. • MM-II - în condiţii ideale este:
dt
tduTty d
)()( = ; Td – constantă de timp de derivare (5.3.15)
80
• f.d.t. sTsH d=)( (5.3.16)
• Răspunsul indicial: Ţinând cont de proprietatea impulsului Dirac (vezi 4.1.4)
1)( =∫∞
∞−
dttδ
şi având în vedere că mărimea de intrare este o treaptă unitară )0(,1)(1 ≥=− ttu :
dt
tduttutdt
)()()()()( 1
1−
−
∞+
∞−=→=∫ δδ (5.3.17)
adică impulsul Dirac - care în acest caz este chiar răspunsul indicial - poate fi considerat ca fiind obtenabil prin derivarea treptei unitare.
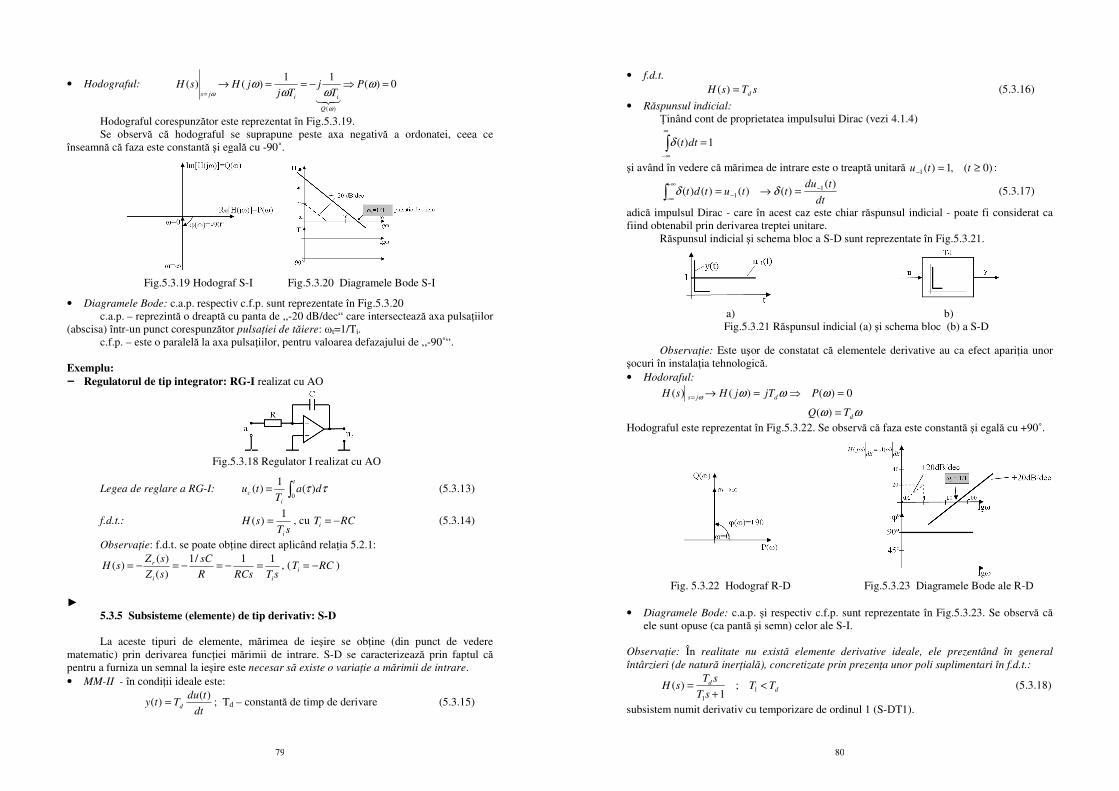
Răspunsul indicial şi schema bloc a S-D sunt reprezentate în Fig.5.3.21.
a) b) Fig.5.3.21 Răspunsul indicial (a) şi schema bloc (b) a S-D
Observaţie: Este uşor de constatat că elementele derivative au ca efect apariţia unor şocuri în instalaţia tehnologică. • Hodoraful:
ωω
ωωωω
d
djs
TQ
PjTjHsH
=
=⇒=→=
)(
0)()()(
Hodograful este reprezentat în Fig.5.3.22. Se observă că faza este constantă şi egală cu +90˚.
Fig. 5.3.22 Hodograf R-D Fig.5.3.23 Diagramele Bode ale R-D
• Diagramele Bode: c.a.p. şi respectiv c.f.p. sunt reprezentate în Fig.5.3.23. Se observă că
ele sunt opuse (ca pantă şi semn) celor ale S-I. Observaţie: În realitate nu există elemente derivative ideale, ele prezentând în general întârzieri (de natură inerţială), concretizate prin prezenţa unor poli suplimentari în f.d.t.:
dd TT
sT
sTsH <
+= 1
1
;1
)( (5.3.18)
subsistem numit derivativ cu temporizare de ordinul 1 (S-DT1).

81
Exemple:
- Regulatorul derivativ ideal: RG-D ideal realizat cu AO (Fig.5.3.27):
Fig.5.3.27 RG-D ideal realizat cu AO
f.d.t. (pe baza relaţiei 5.2.1):
sTsRCsC
RsH d
Td
=−=−= 321/1)(
Legea de reglare RG-D ideal: )()( taTtu dc = (5.3.19)
Fig.5.3.24 Circuitul RC-serie Fig.5.3.25 Amortizor hidraulic Fig.5.3.26 Tahogenerator
►
- circuit RC-serie (Fig.5.3.24) Considerând uc=u - mărimea de intrare şi respectiv i=y - mărimea de ieşire, MM-II
este:
dt
duCiy C==
Observaţie: Circuitul RC-serie în cazul considerării variabilelor terminale: u=ui şi y=uc devine un S-PT1 ► - amortizor hidraulic (Fig.5.3.25):
MM-II: dt
duKFe =
► - tahogenerator (Fig.5.3.26):
MM-II: dt
dKue
θ=
►
5.3.6 Subsisteme (elemente) de tip: proporţional derivativ de ordinul 1 – S-PD1
proporţional derivativ de ordinul 2 – S-PD2
MM-II S-PD1: )()()( tutuTty += & (5.3.20)
S-PD2: 0)1()2(2 /1);()(2)()( ωξ =++= TtutTutuTty (5.3.21)
82
f.d.t. S-PD1: 1)( += TssH (5.3.22)
S-PD2: 022 /1;12)( ωξ =++= TTssTsH (5.3.23)
Caracteristicile logaritmice de frecvenţă sunt practic simetricele caracteristicilor logaritmice de frecvenţă ale S-PT1 respectiv S-PT2 (pentru aceleaşi valori ale constantelor de timp) – faţă de axa pulsaţiilor
c.a.p - pentru S-PD1 – are o pantă de +20 dB/dec , Tf /1=ω
pentru S-PD2 – are o pantă de +40 dB/dec , Tf /1=ω
c.f.p - pentru S-PD1 – variază între 0 şi +90º pentru S-PD2 – variază între 0 şi +180º
Fig.5.3.28 Diagramele Bode pentru S-PT1 şi S-PD1
(pentru aceleaşi valori ale constantelor de timp)
Fig.5.3.29 Diagramele Bode pentru S-PT2 şi S-PD2
(pentru aceleaşi valori ale constantelor de timp)
Observaţia1: Se observă că atât S–PD1 cât şi S-PD2 au faza tot timpul pozitivă – ceea ce înseamnă că de fapt ieşirea este defazată înaintea intrării – adică ieşirea anticipă intrarea, acest tip de elemente se mai numesc elemente de anticipare de ordinul 1 respectiv 2.
S-PD1 şi S-PD2 prezentate sunt idealizate. În practică nu există sisteme fizice cu astfel de comportări – ele ar infirma princpiul cauzalităţii: nu poate exista efect înaintea aplicării cauzei.

83
Funcţiile de transfer corespunzătoare sistemelor fizice care manifestă astfel de comportări au unul sau mai mulţi poli suplimentari. Astfel, în loc de S-D se realizează practic un S-DT1, sau în loc de S-PD se realizează practic un S-PD1 ş.a.m.d. Constantele de timp corespunzătoare de temporizare (întârzierea) sunt însă mici în comparaţie cu cele de anticipare – pentru astfel de elemente– astfel încât practic se operează cu f.d.t. idealizate de forma prezentată, rezultatele obţinute fiind valabile şi pentru cazurile reale. □ Observaţia2: Caracterul (denumirea) de temporizare (întârziere) este dat de polinomul din membrul stâng al MM-II, respectiv de numitorul f.d.t.
Caracterul (denumirea) derivativ (anticipare) este dat de polinomul din membrul drept al MM-II, respectiv de numărătorul f.d.t.
Caracterul proporţional este dat de coeficientul de transfer (sau amplificare) al sistemului. □
5.3.7 Sisteme (elemente) cu timp mort: S-Tm
Se definesc prin faptul că faţă de momentul aplicării unui semnal de intrare, apariţia
mărimii de ieşire are loc după un interval de timp constant, Tm – denumit timp mort sau timp
de transport. Exemple de sisteme cu timp mort sunt:
a) Transportorul cu bandă (Fig. 5.3.30) - care primeşte material dintr-un buncăr prin acţionarea unei clapete. Notând cu: mi(t) – masa încărcată pe banda transportoare (=u(t))
md(t) – masa descărcată de pe bandă (=y(t)) )()( mid Ttmtm −= (5.3.24)
Fig. 5.3.30 Transportor cu bandă Fig. 5.3.31 Instalaţie de încălzire centrală ►
b) Instalaţia de încălzire centrală (Fig. 5.3.31) – cu variaţia debitului de agent termic (controlul temperaturii este efectuat la consumator).
Fabur(t)= u(t) – debitul de abur (la o anumită temperatură) la ieşirea din cazan )()( mabur TtFty −= – debitul de abur la consumator (5.3.25)
În ambele cazuri: Tm=L/v – timpul mort (5.3.26)
Comportarea dinamică a unor astfel de elemente care reprezintă S-P cu timp mort este descrisă de: • MM-II )()( mTtKuty −= K – coeficient de transfer (5.3.27)
Tm – timp mort • f.d.t.
84
sTmeKsH ⋅−⋅=)( (5.3.28)
Observaţie: prezenţa unui factor de forma sTme ⋅− în componenţa unei f.d.t. indică prezenţa timpului mort (vezi Anexa 1 - Teorema deplasării). • Răspunsul indicial corespunzător MM-II (5.3.27) este:
)()( 1 mTtKuty −= − (5.3.29)
fiind reprezentat în Fig. 5.3.32. Schema bloc corespunzătoare este reprezentată în Fig. 5.3.33.
Fig. 5.3.32 Răspunsul indicial al unui S-P-Tm Fig. 5.3.33 Schema bloc a unui S-P-Tm
• Hodograful elementului S-P cu timp mort corespunzător f.d.t. (5.3.21) este:
}
[ ]mmTj TjTKKejH m ωωω
ωϕ
ω sincos)()(
−== − (5.3.31)
cu mTKP ωω cos)( = şi mTKQ ωω sin)( −=
sau
−=
=
mT
KA
ωωϕ
ω
)(
)( cerc cu centrul în origine, de rază K, reprezentat în Fig. 5.3.35.
• Diagramele Bodé corespunzătoare sunt reprezentate în Fig. 5.3.36.
Fig. 5.3.35 Hodograful unui S-PT1-Tm Fig. 5.3.36 Diagramele Bode ale unui S-PT1-Tm Exemplele considerate reprezintă sisteme de tip proporţional cu timp mort S-P-Tm.
□ Un sistem S-PT1 cu timp mort S-PT1-Tm are o funcţie de transfer de forma:
f.d.t. sTmeTs
KsH ⋅−
+=
1)( (5.3.23)
şi un răspuns indicial reprezentat în Fig. 5.3.34:
Fig. 5.3.34 Răspunsul indicial al unui S-PT1
85
5.3.8 Regulatoare tipizate În cadrul structurilor SRA se utilizează în principal regulatoare standardizate cu legi de reglare tipizate: P, I, PI, PD, PID. Regulatoarele de tip proporţional - P, derivativ - D (idealizat) şi integrator - I au fost deja prezentate în variante de realizare cu AO. Ele pot fi realizate de asemenea şi în variante pneumatice, electropneumatice, electrohidraulice, ş.a. Numele acestor tipuri de regulatoare este dat de membrul drept al legii de reglare, în care apar componente proporţionale cu abaterea )(taK R - pentru RG-P, integrala abaterii
∫ dttaTi
)(1
pentru RG-I, şi respectiv derivata abaterii )(taTd & pentru RG-D.
Componenta proporţională - P are un rol important în asigurarea unei amortizări corespunzătoare, implicit asupra stabilităţii sistemului. În unele cazuri, în locul factorului de amplificare KR se utilizează o mărime numită bandă de proporţionalitate (BP).
%100
RKBP = (5.3.32)
Componenta integratoare - I este importantă pentru asigurarea unei erori minime în regim staţionar, asigură îndeplinirea condiţiei de reglare 0)(lim =
∞→ta
t la semnale de intrare
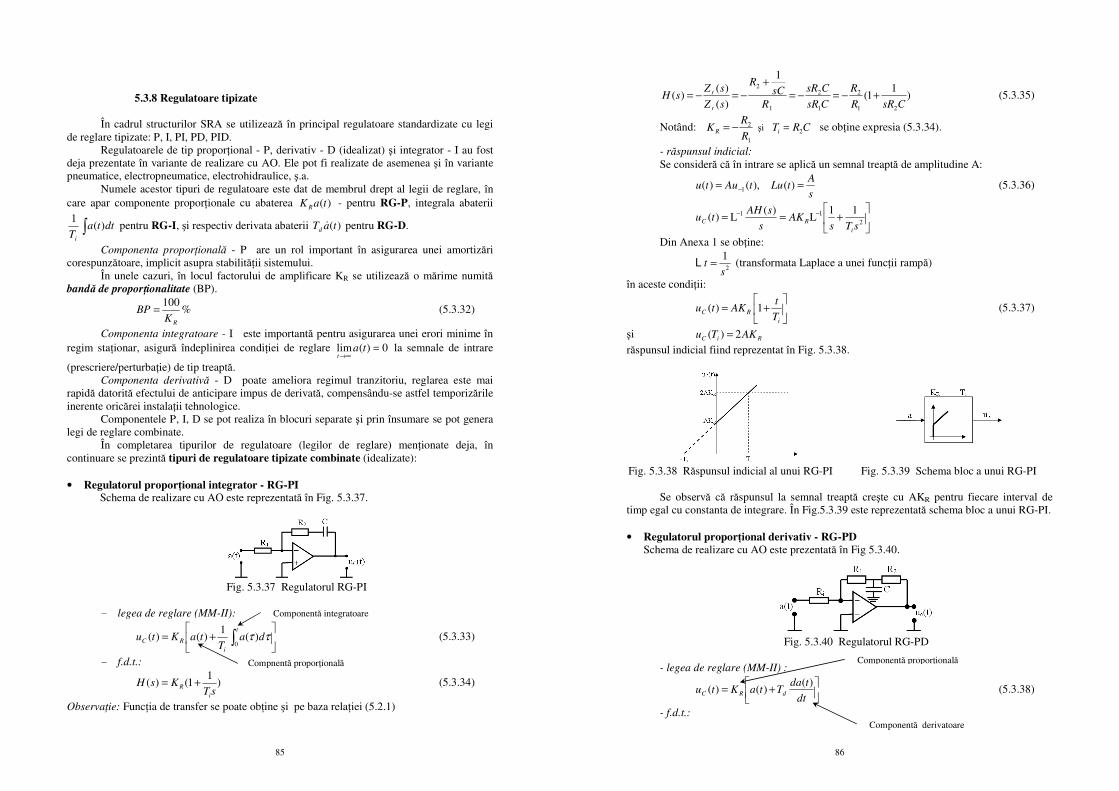
(prescriere/perturbaţie) de tip treaptă. Componenta derivativă - D poate ameliora regimul tranzitoriu, reglarea este mai rapidă datorită efectului de anticipare impus de derivată, compensându-se astfel temporizările inerente oricărei instalaţii tehnologice. Componentele P, I, D se pot realiza în blocuri separate şi prin însumare se pot genera legi de reglare combinate. În completarea tipurilor de regulatoare (legilor de reglare) menţionate deja, în continuare se prezintă tipuri de regulatoare tipizate combinate (idealizate): • Regulatorul proporţional integrator - RG-PI
Schema de realizare cu AO este reprezentată în Fig. 5.3.37.
Fig. 5.3.37 Regulatorul RG-PI
- legea de reglare (MM-II):
+= ∫
t
iRC da
TtaKtu
0)(
1)()( ττ (5.3.33)
- f.d.t.:
)1
1()(sT
KsHi
R += (5.3.34)
Observaţie: Funcţia de transfer se poate obţine şi pe baza relaţiei (5.2.1)
Componentă integratoare
Compnentă proporţională
86
)1
1(
1
)(
)()(
21
2
1
2
1
2
CsRR
R
CsR
CsR
RsC
R
sZ
sZsH
r
r +−=−=+
−=−= (5.3.35)
Notând: 1
2
R
RKR −= şi CRTi 2= se obţine expresia (5.3.34).
- răspunsul indicial: Se consideră că în intrare se aplică un semnal treaptă de amplitudine A:
s
AtLutAutu == − )(),()( 1 (5.3.36)
+== −−
211 11
L)(
L)(sTs
AKs
sAHtu
i
RC
Din Anexa 1 se obţine:
2
1
st =L (transformata Laplace a unei funcţii rampă)
în aceste condiţii:
+=
iRC T
tAKtu 1)( (5.3.37)
şi RiC AKTu 2)( =
răspunsul indicial fiind reprezentat în Fig. 5.3.38.
Fig. 5.3.38 Răspunsul indicial al unui RG-PI Fig. 5.3.39 Schema bloc a unui RG-PI
Se observă că răspunsul la semnal treaptă creşte cu AKR pentru fiecare interval de timp egal cu constanta de integrare. În Fig.5.3.39 este reprezentată schema bloc a unui RG-PI.
• Regulatorul proporţional derivativ - RG-PD
Schema de realizare cu AO este prezentată în Fig 5.3.40.
Fig. 5.3.40 Regulatorul RG-PD
- legea de reglare (MM-II) :
+=
dt
tdaTtaKtu dRC
)()()( (5.3.38)
- f.d.t.:
Componentă proporţională
Componentă derivatoare
87
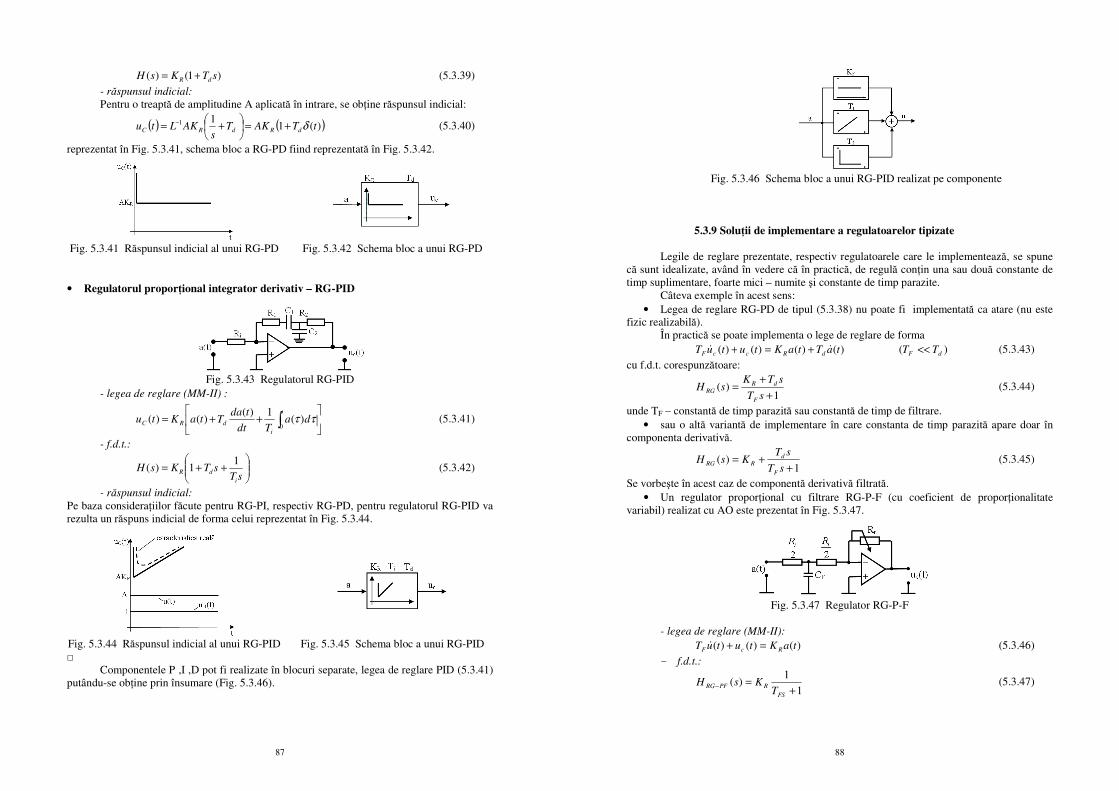
)1()( sTKsH dR += (5.3.39)
- răspunsul indicial: Pentru o treaptă de amplitudine A aplicată în intrare, se obţine răspunsul indicial:
( ) ( ))(111 tTAKTs
AKLtu dRdRC δ+=
+= − (5.3.40)
reprezentat în Fig. 5.3.41, schema bloc a RG-PD fiind reprezentată în Fig. 5.3.42.
Fig. 5.3.41 Răspunsul indicial al unui RG-PD Fig. 5.3.42 Schema bloc a unui RG-PD
• Regulatorul proporţional integrator derivativ – RG-PID
Fig. 5.3.43 Regulatorul RG-PID
- legea de reglare (MM-II) :
++= ∫
t
idRC da
Tdt
tdaTtaKtu
0)(
1)()()( ττ (5.3.41)
- f.d.t.:
++=
sTsTKsH
idR
11)( (5.3.42)
- răspunsul indicial: Pe baza consideraţiilor făcute pentru RG-PI, respectiv RG-PD, pentru regulatorul RG-PID va rezulta un răspuns indicial de forma celui reprezentat în Fig. 5.3.44.
Fig. 5.3.44 Răspunsul indicial al unui RG-PID Fig. 5.3.45 Schema bloc a unui RG-PID □
Componentele P ,I ,D pot fi realizate în blocuri separate, legea de reglare PID (5.3.41) putându-se obţine prin însumare (Fig. 5.3.46).
88
Fig. 5.3.46 Schema bloc a unui RG-PID realizat pe componente
5.3.9 Soluţii de implementare a regulatoarelor tipizate
Legile de reglare prezentate, respectiv regulatoarele care le implementează, se spune că sunt idealizate, având în vedere că în practică, de regulă conţin una sau două constante de timp suplimentare, foarte mici – numite şi constante de timp parazite. Câteva exemple în acest sens:
• Legea de reglare RG-PD de tipul (5.3.38) nu poate fi implementată ca atare (nu este fizic realizabilă). În practică se poate implementa o lege de reglare de forma )()()()( taTtaKtutuT dRccF && +=+ )( dF TT << (5.3.43)
cu f.d.t. corespunzătoare:
1
)(+
+=
sT
sTKsH
F
dRRG (5.3.44)
unde TF – constantă de timp parazită sau constantă de timp de filtrare. • sau o altă variantă de implementare în care constanta de timp parazită apare doar în
componenta derivativă.
1
)(+
+=sT
sTKsH
F
dRRG (5.3.45)
Se vorbeşte în acest caz de componentă derivativă filtrată. • Un regulator proporţional cu filtrare RG-P-F (cu coeficient de proporţionalitate
variabil) realizat cu AO este prezentat în Fig. 5.3.47.
Fig. 5.3.47 Regulator RG-P-F
- legea de reglare (MM-II):
)()()( taKtutuT RcF =+& (5.3.46)
- f.d.t.:
1
1)(
+=−
FS
RPFRG TKsH (5.3.47)

89
cu: FiFr
R CRTR
RK
2
1
2
1; ⋅=−=
având caracteristica logaritmică amplitudine pulsaţie reprezentată în Fig. 5.3.48:
Fig. 5.3.48 Caracteristica amplitudine-pulsaţie a RG-PF
Din Fig. 5.3.48 se observă că filtrul (Ri, CF) introdus în intrarea AO realizează filtrarea
perturbaţiilor parazite care în general sunt de frecvenţe mult mai mari decât semnalul util. • În Fig. 5.3.49 este reprezentat un regulator PI cu filtrare RG-PI-F
Fig. 5.3.49 Regulator PI-F
- f.d.t.:
1
1)
11(
++=−− sTsT
KHFi
RFPIRG
unde: FiFrri
i
rR CRTCRT
R
RK
4
1;; ==−=
90
Rezumat – Capitolul 5
� Forma generală a expresiei f.d.t. cu explicitarea zerourilor şi polilor sistemului este:
∏∏
∏∏
==
==
+++
+++
=ba
ba
n
l
n
i
m
q
m
j
s
KsH
1ll
22l
1i
α
1qq
22q
1j
)1sT2ξsT()1sT(
)1sT2ξsT()1sT(
)(
� f.d.t. a unui regulator analogic realizat cu amplificatoare operaţionale se poate calcula cu o
relaţie de forma:
)(
)(
)(
)()(HRG sZ
sZ
sU
sYs
i
r−=−=
� Pentru un S-P:
MM-II : )()( tkuty = f.d.t. : ksH =)(
� Pentru un S-PT1:
MM-II : )()()( tutytyT =+&
f.d.t. : 1
)(+
=Ts
KsH
� Pentru un S-PT2:
MM-II : KuyTyyT =++ )1()2(2 2ξ
f.d.t. : 122
)(222
002
20
++≡
++=
TssT
K
ss
KsH
ξωξω
ω;
0
1
ω=T
� Pentru S-I:
MM-II : ∫=t
i
duT
ty0
)(1
)( ττ
f.d.t. : sT
sHi
1)( =
� Pentru S-D:
MM-II : dt
tduTty d
)()( =
f.d.t. : sTsH d=)(
� Pentru S-PD1:
MM-II : )()()( tutuTty += &
f.d.t. : 1)( += TssH
� Pentru S-PD2:
MM-II : 0)1()2(2 /1);()(2)()( ωξ =++= TtutTutuTty
f.d.t. : 022 /1;12)( ωξ =++= TTssTsH
� Pentru S-P cu timp mort:
MM-II : )()( mTtKuty −=
f.d.t. : sTmeKsH ⋅−⋅=)(
� Banda de proporţionalitate a unui RG-P se defineşte ca
%100
RKBP =

91
� Legea de reglare şi f.d.t. corespunzătoare unui RG-PI sunt:
+= ∫
t
iRC da
TtaKtu
0)(
1)()( ττ
)1
1()(sT
KsHi
R +=
� Legea de reglare şi f.d.t. corespunzătoare unui RG-PD sunt:
+=
dt
tdaTtaKtu dRC
)()()(
)1()( sTKsH dR += � Legea de reglare şi f.d.t. corespunzătoare unui RG-PD sunt:
++= ∫
t
idRC da
Tdt
tdaTtaKtu
0)(
1)()()( ττ
++=
sTsTKsH
idR
11)(
Întrebări recapitulative pentru Capitolul 5
� Precizaţi expresia generală a f.d.t. cu explicitarea zerourilor şi polilor sistemului.
� Care este relaţia de calcul a f.d.t. a unui regulator analogic realizat cu AO?
� Precizaţi MM-II, f.d.t., răspunsul indicial şi diagramele Bodé pentru subsisteme de tipul: S-P,
S-PT1, S-PT2, S-I, S-D, S-PD1, S-PD2.
� Ridicaţi hodograful unui S-PT1.
� Precizaţi MM-II şi f.d.t. şi răspunsul indicial al unui S-P cu timp mort.
� Reprezentaţi schemele realizate cu AO, precizaţi expresiile legilor de reglare, a f.d.t., şi
răspunsului indicial pentru regulatoarele tipizate (ideale) de tipul: RG-P, RG-I, RG-D, RG-PI,
RG-PD, RG-PID.
� Precizaţi câteva soluţii de implementare a regulatoarelor tipizate care includ şi constante de
timp de filtrare (pentru RG-P-F, RG-PD-F, RG-PI-F).