Robotics 2011 09 Control 1 - · PDF fileLi Ri t + η gearbox d efficiency ... ij j ijk j k...
46
Industrial Robots Industrial Robots Control Control – Part 1 Part 1 Control Control Part 1 Part 1
Transcript of Robotics 2011 09 Control 1 - · PDF fileLi Ri t + η gearbox d efficiency ... ij j ijk j k...

Industrial RobotsIndustrial Robots
ControlControl –– Part 1Part 1Control Control Part 1Part 1

Introduction to robot control
The motion control problem motion control problem consists in the design of control algorithms for the robot actuators
In particular it consists in generating the time functions of the li d i h h h TCP igeneralized actuating torques, such that the TCP motion
follows a specified task specified task in the cartesian space, fulfilling the specifications on transient and steady state responsespecifications on transient and steady‐state response requirements
Basilio Bona 2ROBOTICA 03CFIOR

Tasks
T f t kt k b d fi dTwo types of tasks tasks can be defined:1. Tasks that do not require an interaction with the environment
(f i ) h i l i TCP f ll i(free space motion); the manipulator moves its TCP following cartesian trajectories, with constraint on positions, velocities and accelerations due to the manipulator itself or the taskaccelerations due to the manipulator itself or the task requirements
Sometimes it is sufficient to move the joints from a specified value ( )q tSometimes it is sufficient to move the joints from a specified value to another specified value without following a specific geometric path
0( )iq t
( )i fq t
2. Tasks that require and interaction with the environment, i.e., where the TCP shall move in some cartesian subspace while subject to forces or torques from the environment
We will consider only the first type only the first type of task
Basilio Bona 3ROBOTICA 03CFIOR

Motion control
In particular the motion control problem motion control problem consists in generating the time functions of the generalized actuating torques, such that the TCP motion follows a specified task in the cartesian space, fulfilling the specifications on transient and steady‐state
iresponse requirements
Control schemes can be developed for:Joint space controlpTask space control
considering that the task description is usually specified in theconsidering that the task description is usually specified in the task space, while control actions are defined in the joint space
Basilio Bona 4ROBOTICA 03CFIOR

Joint space control
Th I Ki ti bl k t f th d i d t k itiThe Inverse Kinematics block transforms the desired task space positions and velocities into desired joint space reference values.
The Transducermeasures the value of the joint quantities (anglesThe Transducermeasures the value of the joint quantities (angles, displacements) and compares them with the desired ones, obtained, if necessary, from the desired cartesian quantities.
The Controller uses the error to generate a (low power) signal for the Actuator that transforms it in a (high power) torque (via the Gearbox) that
Basilio Bona 5ROBOTICA 03CFIOR
moves the robot joints

Task space control
Controller Actuator Gearbox Robotdp p
Transducer
In this case, the Transducermust measure the task space quantities in order to
Transducer
In this case, the Transducermust measure the task space quantities in order to compare them with desired ones.
Usually this is not an easy task, since it requires environment‐aware sensors; y y , q ;the most used ones are digital camera sensors (vision‐based control) or other types of exteroceptiveexteroceptive sensors (infra‐red, ultra‐sonic, ...).
Otherwise one uses the direct kinematics to estimate the task space pose
Torques are always applied to the joints, so Inverse Kinematics is hidden inside
Basilio Bona 6ROBOTICA 03CFIOR
the Controller block

Joint space control architectures
T i j i t t l hit tj i t t l hit t iblTwo main joint space control architectures joint space control architectures are possible
Decentralized control or independent joint control: each i‐th joint motor has a p j jlocal controller that takes into account only local variables, i.e., the joint position and velocity The control is of SISO type usually based on a P PD or PID architecture
( )iq t ( )
iq t
The control is of SISO type, usually based on a P, PD or PID architectureThe controller is designed considering only an approximated model of the i‐th joint. This scheme is very common in industrial robots, due to its simplicity, modularity and robustnessThe classical PUMA robot architecture is shown in the following slideThe classical PUMA robot architecture is shown in the following slide
Centralized control: there is only one MIMO controller that generates a command vector for each joint motor; it is based on the complete model of the manipulator and takes into account the entire vector of measured positions and velocities
Basilio Bona 7ROBOTICA 03CFIOR
and velocities

Decentralized control
joint 1reference
Decentralized Joint Control 1
( )q tcontroller 1
joint 2 ( )q tJoint spacecontroller 2
joint 2referenceTask space 2
( )q t
…
controller 6
joint 6reference 6
( )q t
Basilio Bona 8ROBOTICA 03CFIOR

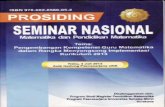
Decentralized controlTeach
DiskTeach
pendant OtherTerminalPUMA Control
μG D/A Amplifier Motor 1
DLV-11J
EPROM
EncoderT=0.875 ms
EPROM
RAM
InterfaceReference
anglesT=28 ms
CPUD/A Amplifier Motor 6μG
EncoderT=0.875 ms
Basilio Bona 9ROBOTICA 03CFIOR
COMPUTER ROBOT CONTROL

Motor and gearbox model (rigid body assumptions)
Gearbox Geartrain
GearboxFriction
′N
r =
Gearbox = Geartrain
′N
RobotInertia,m rN; ω τ
τFriction
m
Inertia ,′ ′ ′m rN ; ω τ
Motor′mτ
Basilio Bona 10ROBOTICA 03CFIOR
r mτ ω′ ′r mτ ω Output powerInput power

Motor and gearbox model
bβ+
mω
i aLaR N bΓ τ
m p= +rτ τ τ
aiaa N b m
avei E mΓ ′N
′τ τ
mβ
mτ′mω
pτ
mβm p
′ ′ ′= −rτ τ τ
′
Basilio Bona 11ROBOTICA 03CFIOR
p′τ

Losses in geared motor
Motorside
Jointside
Armature circuit
Motor inertia Gearbox Joint
inertiaaEi
m rω τ′ ′
a av i
m rω τ
m mω τ
ddda a a a
L i R it
+ ηgearboxefficiency
ddm m m mt
Γ ω β ω′ ′+voltage drop
efficiency
dΓ ω β ω+
pτ ′
db m b mtΓ ω β ω+
Basilio Bona 12ROBOTICA 03CFIOR
pτ

Gearbox model
ρ θ ρθρ ω ρω
′ ′ =′ ′
Nr
Nρρ
= =′ ′ω τ
Joint side ρ
ρ ω ρω= Nρm rω τ
Ideal gearbox: 1η =
θGEARBOX
Power in Power out
M t id
θ′
′
GEARBOX
m rω τ′ ′
m r m rω τ ηω τ′ ′=
Motor side ρ′
m rω τ′ ′
rτ τ ′=r r
m
rτ τω
ω′
=
Basilio Bona 13ROBOTICA 03CFIOR
m r

CC motor equations – 1
d
MOTOR SIDE
dda a a a a
L i v R i E
K it
φ
= − −
e
m m
K i
E k Kφ
ωω ωφ
φ=
′ ′= =k k K K′ ⇒m m
m a ak i K i
ω
τττ
φ′ ′= =′
k k K Kω τ′≈ ⇒ ≈
mai
Kτ
τ=
′ ′ ′p m m m m m m m m
r m p
τ β ω βτΓ θ ω
τ τθ Γ′ ′ ′= + = +
′ ′ ′= −
Basilio Bona 14ROBOTICA 03CFIOR
r m p

CC motor equations – 2
GEARBOX SIDE
′1
MOTOR SIDE
( )r r
m p
r
r
τ ττ τ
′=′ ′−
⎡ ⎤=
1
1( )
r rrτ τ′ =
+
( ) ( )m m m m m
m m m m m
r
r r r
τ ω β ω
τ ω β ω
Γ
Γ
⎡ ⎤′ ′ ′= − −⎢ ⎥⎣ ⎦⎡ ⎤′= − −⎢ ⎥⎣ ⎦
( )
1m prτ τ
τ ω β ωΓ⎡ ⎤= ⎢ ⎥⎣ ⎦
= +
+ +2( )
m m m m m
m m m m mr r Γτ β ωω⎣ ⎦′= − +
1 1 1
m b m b m
m b m b m
rτ ω β ω
τ ω β ω
Γ
Γ
⎢ ⎥⎣ ⎦⎡ ⎤⎛ ⎞⎟⎜⎢ ⎥′ ′= +⎟⎜
+ +
⎛⎟⎢ ⎥⎜ ⎟
⎞⎟⎜+ ⎟⎜ ⎟⎜ ⎟
2
1 1( )
m b m b m
m b m b m
r r rβ
Γτ ω β ω
⎟⎢ ⎥⎜ ⎟⎝ ⎠ ⎟⎣ ⎦
′ ′=
⎜⎝
+
⎟⎠
+2( )
m b m b mr rβ
Basilio Bona 15ROBOTICA 03CFIOR

Control equations
( ) ( , ) ( ) ( ) Te
+ + + + =H q q C q q q B q q g q J F τ
component-wise joint torques
( ) )) ((n n n
ij j ijk j k bi i i fi iH q qh gq qβ τ τ+ + + + =∑ ∑∑q q q1 1 1
( ) )) ((ij j ijk j k bi i i fi ri
j j k
q q gq qβ= = =
+ + + +∑ ∑∑q q q
1 1
( ) ( ) ( )( )r
n n n
i ij j ijk j k bi i i fij i
ij
ik
iq H qH q qh gqβ τ
≠ = =
+ =+ + + +∑ ∑∑q q q q τ
I ti l t Coriolis & centripetal Friction, gravity
Basilio Bona 16ROBOTICA 03CFIOR
Inertial torques Co o s & ce t petatorques
ct o , g a ty& external torques

Control equations
( ) ( ) ( )( )n n n
H q h q q gH q q ττβ+ =+ + + +∑ ∑∑q q qq1 1
( ) ( ) ( )( )ij j ijk j kii i bi i fi
j i j krii
H q h q q gH q q ττβ≠ = =
+ =+ + + +∑ ∑∑q q qq
( )Mi i i fii i bi ii i
H q q τ τ ττβ τ+ + ++ + =q( )Mi ci gi f rii i bi ii i
q q τ τ ττβ τ+ + ++ +q
Modelled torques “Disturbance” torques
Basilio Bona 17ROBOTICA 03CFIOR

From single motor model to robot control equation
θ′ ′ ′mi mi mi
i i ii i i
q qr r
qr
θ ω ω= = =
′ ′ ′
Gearbox transformationGearbox transformation
n
H q H qqτ β τ τ τ τ= + + + + ++∑
StructuredStructured
ri ii i bi i ij j Mi ci gi fij i
mi mi
H q H qqτ β τ τ τ τ
ωβ τ τ τ τΓ
ω≠
= + + + + +
′+ + +
+
′= + +
∑
StructuredStructureddisturbancedisturbancebi bi Mi ci gi fi
i i
mi mi
r rβ τ τ τ τ
ωβ
Γ
ωΓ
+ + +=
′
+ +
′mi mi
bi bi dii ir r
βΓ τ= + +
Basilio Bona 18ROBOTICA 03CFIOR
Equation seen at the joint sidejoint side

From single motor model to robot control equationEquation seen at the motor sidemotor sideEquation seen at the motor sidemotor side
since
( )1 1 1Γ β′ ′′( )2ri ri bi mi bi mi di
i iir rr
Γ βωτ τ ω τ′ ′+ +′= =
( )ri mi pi mi mi mi mi miτ τ τ τ Γ β ωω′ ′ ′ ′= = +′ ′− −
and
1 1 1β βΓ Γ
⎛ ⎞ ⎛ ⎞⎟ ⎟⎜ ⎜⎟ ⎟′ ′ ′ ′+ ⎜ + +⎜ + +′
we obtain
2 2mi ri pi bi mi mi bi mi mi diii irr r
τ τ τ β β τΓ ωΓ ω⎟ ⎟′ ′ ′ ′= + = ⎜ + +⎜ + +⎟ ⎟⎜ ⎜⎟ ⎟⎟ ⎟⎜ ⎜⎝ ⎠ ⎝ ⎠′
Total inertia Total friction
Basilio Bona 19ROBOTICA 03CFIOR

From single motor model to robot control equation
mi pi di ti mi ti mi diτ τ τ ω β ω τΓ′ ′ ′ ′ ′ ′ ′= + = + +′
′ ′ ′ ′ ′ ′ ′ ′= + = + +Bτ τ τ Γ ω ω τ Motor sideMotor sidep d t m t mm d
= + = + +Bτ τ τ Γ ω ω τ Motor sideMotor side
= + +t′Γ
t′B
⎛ ⎞ ⎛ ⎞2
1bi mi
ir
Γ Γ⎛ ⎞⎟⎜ ⎟⎜ + ⎟⎜ ⎟⎟⎜⎝ ⎠
2
1bi mi
ir
β β⎛ ⎞⎟⎜ ⎟⎜ + ⎟⎜ ⎟⎟⎜⎝ ⎠
Basilio Bona 20ROBOTICA 03CFIOR
i⎝ ⎠ i⎝ ⎠

From single motor model to robot control equation
mi pi di ti mi ti mi diτ τ τ ω β ωΓ τ= + = + +
Joint sideJoint side= + = + +Bτ τ τ Γ ω ω τ Joint sideJoint sidep d t m t m dm
= + = + +Bτ τ τ Γ ω ω τ
= + +t
ΓtB
( )2bi i mirΓ Γ+ ( )2
bi i mirβ β+
Basilio Bona 21ROBOTICA 03CFIOR

Block diagram of open‐loop CC motor (motor side)For simplicity we drop the prime ′ symbolFor simplicity we drop the prime ′ symbol
for the motor side quantities, and we consider the generic i-th motor
Taking the Laplace transform of the involved variables, we haveg p ,
( ) ( ) ( ) ( )t t m m d
s s s sβ ω τ τΓ + = −( ) ( ) ( ) ( )t t m m d
m aK iτ
βτ =
1( ) ( )s sθ ω
+dτ
( ) ( )m ms s
sθ ω=
+
–+
1
a aR sL+
1
t tsβ Γ+
Kτ
1s
av
ai m
τ mω
mθ–
rτ
Kω
E
Basilio Bona 22ROBOTICA 03CFIOR
ω

Block diagram of open‐loop CC motor (motor side)
Th t i it i d t i ll d ll b l t d The armature circuit inductance is small and usually can be neglected
0 v RL i K ω=≈ ⇒0aa a a m
v RL i Kωω− =≈ ⇒
τm
ai
Kτ
τ=
ma a mv R K
K ωτ
τω− =
m d t m t m
a a aR R R
K
τ τ ω β ω
β
Γ
Γ
= + +⎡ ⎤⎛ ⎞⎟⎜⎢ ⎥a a a
a d t t mv s K
K K Kωτ τ τ
τ β ωΓ ⎟⎜⎢ ⎥⎟− = + +⎜ ⎟⎢ ⎥⎜ ⎟⎜⎝ ⎠⎢ ⎥⎣ ⎦
Basilio Bona 23ROBOTICA 03CFIOR

Block diagram of open‐loop CC motor (motor side)
R βa tR
K K KKω ω ω
τ
β′ = + ≈
a tR
Kβ
since
friction torque
a tm m
KK ω
τ
ω ω
t ma a mR i K
K i ω
β ωω
armature losses armature e.m.f.torque m
aK iτ
τ
Basilio Bona 24ROBOTICA 03CFIOR

Block diagram of open‐loop CC motor (motor side)
⎛ ⎞ 11a t a
m a d
R Rs v
K K K K Kτ ω ω τ ω
Γω τ
⎛ ⎞⎟⎜ ⎟+ = −⎜ ⎟⎜ ′ ′ ′⎟⎜⎝ ⎠
dτ
⎝ ⎠
a tR
TK K
Γ=
′dτ
Ka
d
K KR
KK
τ ω
=where
– θ
dK Kτ
+ ( )G sω
1s
av m
ωmθ
( ) ( )1
G s =
Basilio Bona 25ROBOTICA 03CFIOR
( ) ( )1G s
K sTωω′ +

Matrix formulation (joint side)Lagrange
( ) ( , ) ( ) ( )
( )
Te
r m m p
+ + + + =≡ = −H q q C q q q Bq g q J q F
Rτ
τ τ τ τ
LagrangeEquation
( )r m m p
where
2= +R R K v R K qτm m m a a m ω+R R R qτ
2( ) ( )m p m m m m m m m m
= + = +R R q B q R q B qτ Γ Γp
Motor side Joint sideMotor side Joint side
0 0 0 00 0
KKK
⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥
and
0 0 ; 0 0 ; 0 0
0 00 0 0 0
im i a
ai a
i i
iR R
Kr
KKτ τ ωω
⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥= = =⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦
R K K
Basilio Bona 26ROBOTICA 03CFIOR
0 00 0 0 0⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦

Matrix formulation (joint side)Then we haveThen, we have
Mass matrix Friction matrix
( ) ( )
( )M q F
( ) ( )( )2 2( ) ( , )
( ) ( )m m m mω+ + + + + +
+ + =
H q R q C q q B R K B q
g q J q F R K v
ΓT( ) ( )
e m a a+ +g q J q F R K v
uGravity
Interaction cu
Command input
Often we use this symbol to indicate
Interaction
( )( , ) ( , )= +h q q C q q F q
ythe velocity dependent terms
Basilio Bona 27ROBOTICA 03CFIOR
( )( ) ( )

Matrix formulation (joint side)
( ) ( ) ( ) ( )T+ + +M h J F
Gravity and interaction
( ) ( , ) ( ) ( )Te c
+ + + =M q q h q q g q J q F u
No interaction
( ) ( , ) ( )c
+ + =M q q h q q g q u
No gravity, no interaction
( ) ( , )c
+ =M q q h q q u
Control Design ProblemControl Design Problem ...?c=u
Basilio Bona 28ROBOTICA 03CFIOR

Decentralized joint control
A i f i li it
( ) ( , )c
+ =M q q h q q u
Assuming, for simplicity
( ) ( , )c
q q q q
If …
( ) diagonal 2 2( )m m m m m
⇒ + ≈R I H q R RΓ Γ
small ( , )C q q q
Th Then …
t d c+ + =q Fq uΓ τ 2
t m m=RΓ Γwith
disturbance
( )t cs + =F uΓ ω
The model is diagonal, i.e., naturally decoupled
Basilio Bona 29ROBOTICA 03CFIOR
g , , y pEach joint can be controlled by local controllers

Decentralized joint controlThis is the proportional velocity controller
dτ
This is the proportional velocity controlleror velocity compensator
d
KdKreference voltage
–
+( )G sω
1s
av m
ωmθ
DK
–
+rv e
( )K ( )tK s
Transducer T.F. ( )K s K≈
Basilio Bona 30ROBOTICA 03CFIOR
(tachimetric sensor)( )t t
K s K≈

Open loop vs Closed loop
( )( )
( ) (1 )m Ds K
G sv s K s Tω
ωα
α′= =
′ +
( ) 1( )
( ) (1 )ms
G sv s K sTω
ω= =
′ + ( ) (1 )rv s K s Tω α+( ) (1 )
av s K sTω +
( )( ) ( )
( ) (1 )m
d d
s TG s K G s
s sTω
ωτ Γ
= = − = −+
( )( ) ( )m d d
s K K TG G
ω α α′ ′
( ) (1 )d ts sTτ Γ +
( )( ) ( )
( ) (1 ) (1 )m d d
dd D t
G s G ss K s T K s Tω
ω α ατ Γ′ ′= = − = − = −
′ + +
1Kωα′
= <
Basilio Bona 31ROBOTICA 03CFIOR
1D t
K K Kω
α = <′ +

The closed‐loop system
dτ
K
dτ –
( )G s1a
v mω
mθ
dK
dK
K
+( )G sω s
Open loop
DK
–
+( )G sω
′ 1s
rv
mω
mθ
s
Closed loop
Basilio Bona 32ROBOTICA 03CFIOR

The closed‐loop system
Time constant is reduced T Tα <
KDisturbance gain is reduced
dd
D
KK
K→
Design parameterd
τ
when 1dK = dK
–
( )G sω
1s
av m
ωmθ
DK
+rv e
+( )
s–
Basilio Bona 33ROBOTICA 03CFIOR

Position compensator
dτController 1
dK
–
( )G1a
vm
ωmθ
K+e
K+rθ
+( )G sω sD
K
–
PK
–
tK
1tK ≈
1K θ ≈
K θ
Basilio Bona 34ROBOTICA 03CFIOR
θ

Position compensator
( )θ1 2
( )( )
( )m
r
s KG s
s s s T K
θθ α
= =+ +
2 2
( ) 1( )
( ) ( )ms
G ss s s T Kτ Γ
θ
α= = −
+ +( ) ( )d ts s s T Kτ Γ α+ +
D P D PK K K K K
K τ= =where
a t
KTK Rω Γ
= =′
Configuration dependent
Second-order TF with
1 1·
2 2
K K
T K R K K Kτ ω
α αζ
Γ
′= =
with 2 2
1
a D P t
D P
T K R K K K
K K KK
τ
τ
α α Γ
ω = =
Basilio Bona 35ROBOTICA 03CFIOR
·n
a t
KR
ωΓ
= =

Design parameters
The damping coefficient and the natural frequency are inversely proportional to the square root of the inertia moment, that may vary p p q , y yin time when the angles vary
2
1t b mr
Γ Γ Γ⎛ ⎞⎟⎜= + ⎟⎜ ⎟⎜ ⎟⎝ ⎠
( )( )b iiH tΓ⎝ ⎠
= q
Since the damping coefficient and the natural frequency are often usedSince the damping coefficient and the natural frequency are often used as control specifications, we can design a controller computing the maximum inertia moment and adjusting the two gains int
Γ ,P DK Kmaximum inertia moment and adjusting the two gains in
such a way that the damping ratio is satisfactory, e.g., no overshoot appears in the step response
,maxt
ζ,P D
Basilio Bona 36ROBOTICA 03CFIOR

An alternative
dτ
KController 2
+
dK
–
+( )G sω
1s
av
mω
mθ
P DK sK′ ′+
–
+rθ e
( ) ( ) ( )a P Dv t K e t K e t′ ′= +
3 2
( ) /( )
( )m D P Ds K K s K K
G sR
τ
Γθθ
′ ′ ′+= =
′
A zero appears
3 2( )
( )r a t a tPs R s s T K K Rτ
Γ α Γθ ′+ +
( ) 1 1( )m
sG
θ ⎛ ⎞⎟⎜ ⎟⎜ ⎟4 2( )
( )m
d t P a t
G ss s s T K K Rτ
τ Γ α Γ⎜= = − ⎟⎜ ⎟⎜ ′ ⎟+ + ⎟⎜⎝ ⎠
Basilio Bona 37ROBOTICA 03CFIOR

Another alternative
dτ
KController 3
++
dK
–+
( )G sω
1s
av
mω
mθ
P DK sK′ ′+
–
+rθ e
–+D
K
Basilio Bona 38ROBOTICA 03CFIOR

Comparison
Controller 1
( ) ( ) ( )t K K t K t( ) ( ) ( )a D P D mv t K K e t K tω= −
Controller 2
( ) ( ) ( ) ( )a P D r D mv t K e t K t K tω ω′= + −
Controller 3Controller 3
( )( ) ( ) ( ) 1 1 ( )a D P D D r D D D mv t K K e t K K t K K K tω ω′ ′ ′ ′= + − +
Basilio Bona 39ROBOTICA 03CFIOR

Practical Issues
1.1. Saturating actuatorsSaturating actuators
2.2. Elasticity of the structureElasticity of the structure
33 Nonlinear friction at jointsNonlinear friction at joints3.3. Nonlinear friction at jointsNonlinear friction at joints
4.4. Sensors or amplifiers with finite band Sensors or amplifiers with finite band 4.4. Sensors or amplifiers with finite band Sensors or amplifiers with finite band
Basilio Bona 40ROBOTICA 03CFIOR

Saturating ActuatorsIt is a nonlinear effect, difficult to be considered a-priori
( )y t
It is a nonlinear effect, difficult to be considered a priori
saturation
( )y t( )u t
( )u t
( )y t( )u t
Li it
saturation
Linearity
( )t⎧⎪ IF
max max
min max
( )
( ) ( ) ( )
y u t u
y t ku t u u t u
⎪⎪⎪⎪⎨⎪
>= ≤ ≤
IFIF
min min( )y u t u
⎪⎪⎪⎪⎩ <IFBasilio Bona 41ROBOTICA 03CFIOR

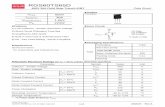
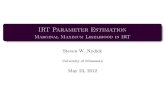
Elasticity of the structure
Although we have considered rigid bodies, the elasticity is a phenomenon that limits the closed loop bandphenomenon that limits the closed loop band
We cannot design controllers that are “too fast” without taking li itl i t id ti t f l ti d lexplicitly into consideration some sort of elastic model.
Recall that when we use a simplified model
( ) ( ) 0t m e mt k tθ θΓ + =
the proper structural resonance (or natural) frequency is
er
kω
Γ=
tΓ
Basilio Bona 42ROBOTICA 03CFIOR

Elasticity of the structure
Basilio Bona 43ROBOTICA 03CFIOR

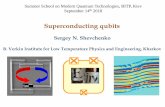
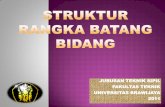
Nonlinear friction
A li ff t b t l it d f i ti fA nonlinear effect between velocity and friction force
total( )f t
istiction
( )
( )f t( )v tviscous
coulomb
stiction
( )v t
Basilio Bona 44ROBOTICA 03CFIOR

Nonlinear friction
Nonlinear static friction models include:Coulomb + viscous
signc
F(v) F (v) vβ= +
Static model that includes stiction and “Stribeck effect”: friction decreases with increasing velocity for v < vs (Stribeckvelocity)
( ) i
s
s
vvF( ) F F F ( )
δ
β−
⎡ ⎤⎢ ⎥⎢ ⎥+ +( ) signs
c s cF(v) F F F e (v) vβ⎢ ⎥= + − +
⎢ ⎥⎢ ⎥⎣ ⎦
Basilio Bona 45ROBOTICA 03CFIOR

Finite pass‐band in sensors and amplifiers
Sensors and amplifiers are often modelled as simple gains, while in the real world they have a finite pass‐band, nonlinearities, saturations, etc.
These effects must be taken into account when the simulated and realThese effects must be taken into account when the simulated and real behaviours differ.
Fortunately, very often the band of sensors and amplifiers is much wider than the final closed loop band of the controlled system.
46ROBOTICA 03CFIORBasilio Bona