Riemann Problems for Two Dimensional Euler Systems...2011/11/16 · The so-called Riemann problem....
39
SIAM Conference on Analysis of PDEs (PD11), November 14-17, 2011, San Diego Marriott Mission Valley, San Diego MS74: Multidimensional Conservation Laws and Related Applications - Part III Riemann Problems for Two Dimensional Euler Systems Yuxi Zheng Yeshiva University
Transcript of Riemann Problems for Two Dimensional Euler Systems...2011/11/16 · The so-called Riemann problem....

SIAM Conference on Analysis of PDEs (PD11),
November 14-17, 2011,
San Diego Marriott Mission Valley, San Diego
MS74: Multidimensional Conservation Laws and
Related Applications - Part III
Riemann Problems for Two
Dimensional Euler Systems
Yuxi Zheng
Yeshiva University

Euler Equation
ρt +∇ · (ρu) = 0,
(ρu)t +∇ · (ρu⊗ u+ pI) = 0,
(ρE)t +∇ · (ρEu+ pu) = 0.
(1)
Cauchy problems: Open

We look for self-similar solutions
(u, v, p, ρ)(ξ, η)
for
ξ =x
t, η =
y
t.

The Euler system becomes the self-similar form
−ξρξ − ηρη + (ρu)ξ + (ρv)η = 0
−ξ(ρu)ξ − η(ρu)η + (ρu2 + p)ξ + (ρuv)η = 0
−ξ(ρv)ξ − η(ρv)η + (ρuv)ξ + (ρv2 + p)η = 0
−ξ(ρE)ξ − η(ρE)η + (ρuE + pu)ξ + (ρvE + pv)η = 0.
(2)

Any initial data has to be
(u, v, p, ρ)(0, x, y) = Independent of radius
The so-called Riemann problem.
It is a boundary-value problem: Initial data be-
comes boundary data at inifinity.

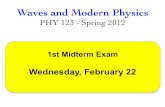
Riemann problems: 2-D
Figure 1: Four−constant Riemann problem
constant state 3
constant state 1
constant state 4
x
y
constant state 2

State 2
State 1
The characteristics are tangent to the sonic curve.of four forward rarefaction waves in the 1990 paper.
η
P
Qsu
bson
ic
a
����
ξ
Figure 2. Proposed structure for the interaction
Z
��������
����

Numerical simulations:
1. Tong Zhang, Guiqiang Chen, Shuli Yang;
2. Lax Liu;
3. Schulz-Rinne, Collins, and Glaz;
4. Tadmore , Kurganov;
5. Glimm, J., Xiaomei Ji; Jiequan Li, Xiaolin Li;
Peng Zhang; Tong Zhang; Yuxi Zheng;
6. W.C. Sheng et al

0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Con
figur
atio
n 1
Density T=0.2
Figure 3: Density contour lines, courtesy of Lax and Liu.

4R (Two forward, two backward)

0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
+1.0

First, two wave interaction:
Hodograph method: paper with Jiequan Li, ARMA
(vol193(2009)).
Direct method (with Xiao Chen)(IUMJ, 59(2010))
with Jiequan Li and Zhicheng Yang, (JDE (2010)).
Then: Simple wave (With Tong Zhang and Jiequan
Li: CMP, v.267(2006))

Then: Semi-hyperbolic patches

0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
+1.0

Semi-hyperbolic patch in channel flow

1. With Kyungwoo Song, on pressure gradient
system, DCDS (2009)
2. With Mingjie Li (Ph.D student from CNU)
ARMA 2011

Recently, in Tianyou Zhang’s thesis, we estab-
lish regularity via a new existence approach for
the pressure gradient system
ut + px = 0,vt + py = 0,pt + pux + pvy = 0,
Or
(pt
p)t − pxx − pyy = 0.

In the self- similar plane
(p− ξ2)pξξ − 2ξηpξη + (p− η2)pηη
+1p(ξpξ + ηpη)2 − 2(ξpξ + ηpη) = 0.
In polar coordinates,
(p− r2)prr +p
r2pθθ +
p
rpr +
1
p(rpr)
2 − 2rpr = 0.
Sonic line.: r2 − p = 0;
Hyperbolic where r2 − p > 0; Elliptic in the
region r2 − p < 0.

D’Alembert type decomposition:
∂+∂−p = q(∂+p− ∂−p)∂−p,∂−∂+p = q(∂−p− ∂+p)∂+p,
where
∂± = ∂θ ± λ−1∂r
λ =
√
p
r2(r2 − p)
q =r2
4p(r2 − p).

Introducing R = ∂+p, S = ∂−p,W = (p, R, S),
pθ = R+S2 ,
Rθ − λ−1Rr = q(S −R)R,
Sθ + λ−1Sr = q(R− S)S.

For the semi-hyperbolic patch solution constructed
in Song and Zheng, pr may blow up. We do not
expect better regularity. In numerical simulations,
demarcation line between hyperbolic region and
elliptic region is composed of the sonic line and
a shock curve. Although the sonic curve changes
dramatically close to the shock, for a large portion
away from connection point with shock it is quite
smooth and pressure p changes smoothly across
it. We mainly focus on this part to propose our
problem for today’s talk.

Problem 1: Given a sonic curve r = f(θ), θa <
θ < θb, with
f ′ ≥ γ > 0,
denoted by Γ. We look for solutions to the PGE in
a class of functions with given first-order deriva-
tive pθ(f−1(r), r) = a0(r)
2 on Γ. We assume
a20 ≥ α > 0.
As a result pr = 2f − pθf ′ ≡ a1(r) is also known on
the sonic curve. We assume pθθ is bounded at the
sonic line.

We show that the precise boundary conditions
are
W |Γ = (r2, a20, a20),
(pθ,√
r2 − pRθ,√
r2 − pSθ)|Γ = (a20,−a20a12 ,
a20a12 ).
Using the hyperbolicity quantity t =√
r2 − p and
r as new independent variables, and introducing
new dependent variables
U(t, r) = R(t, r)− a20(r)− a1(r)t,
V (t, r) = S(t, r)− a20(r) + a1(r)t,

The system is transformed into
Ut +2tλ−1
S+2rλ−1Ur = b1(U, V ),
Vt − 2tλ−1
R−2rλ−1Vr = b2(U, V ),
where b1(U, V ) and b2(U, V ) contain a singular
term U−Vt and depend on a0 and a1.
b1(U, V ) = 12
(
U−Vt
)
+
(
2t2qRS+2rλ−1 − 1
2
)
(
U−Vt +2a1
)
−f(a0, a1, V ),
b2(U, V ) = 12
(
V−Ut
)
+
(
2t2qSR−2rλ−1 − 1
2
)
(
V−Ut − 2a1
)
+g(a0, a1, U),

and
f(a0, a1, V ) = 2tλ−1
S+2rλ−1
(
∂r(a20 + ta1))
,
g(a0, a1, U) = 2tλ−1
R−2rλ−1
(
∂r(a20 − ta1))
.
The boundary conditions are
U(0, r) = V (0, r) = Ut(0, r) = Vt(0, r) = 0,
(ra ≤ r ≤ rb.)
By establishing an iteration scheme we establish
the existence of a solution by showing that itera-
tion sequence converges under a weighted metric

through characteristic analysis. The main result
is stated as follows:
Theorem. Assume a0 and a1 are in C3([ra, rb])
and D(δ0) is a strong determinate domain, then
there exists a δ > 0 such that on D(δ), the degen-
erate hyperbolic problem has a classical solution
in S.
Proof.
Now λ−1(t, r) = tr√r2−t2
and q(t, r) = r2
4(r2−t2)t2.

Let
D(δ0) := {(t, r)|0 ≤ t ≤ δ0, r1(t) ≤ r ≤ r2(t)},
where r1(t), r2(t) are continuously differentiable
on 0 ≤ t ≤ δ0, r1(0) = ra, r2(0) = rb and r1 < r2for 0 ≤ t ≤ δ0.
Definition a strong determinate domain D(δ0).

Solutions of the Cauchy problem will be ob-
tained within the class S consisting of all continu-
ously differentiable functions F =
(
f1f2
)
: D(δ) →
R2 satisfying the following properties:
(S1) fi(0, r) = ∂tfi(0, r) = 0 (i = 1,2),
(S2)∥
∥
∥
f1t2
∥
∥
∥
0+∥
∥
∥
f2t2
∥
∥
∥
0≤ M ,
(S3)∥
∥
∥
∂rf1t2
∥
∥
∥
0+∥
∥
∥
∂rf2t2
∥
∥
∥
0≤ M ,

(S4) Fr is Lipschtz continuous with respect to r
with
∥
∥
∥
∥
∂2rrf1t2
∥
∥
∥
∥
0+
∥
∥
∥
∥
∂2rrf2t2
∥
∥
∥
∥
0≤ M ,
where || · ||0 is the superem norm over domain
D(δ) and 0 < δ ≤ δ0. We will denote W the
larger class containing only continuous functions
on D(δ) which satisfy the first two conditions
(S1) and (S2). Both S and W are subsets of
C0(D(δ);R2).

We define a new weighted metric on S and W :
d(F,G) :=
∥
∥
∥
∥
f1 − g1t2
∥
∥
∥
∥
0+
∥
∥
∥
∥
f2 − g2t2
∥
∥
∥
∥
0. (3)
We will construct an integration iteration.
Assume u(t, r) and v(t, r) are admissible func-
tions on D(δ), i.e. they belong to set S. Differ-
entiate along the two characteristics defined by:
d
d+(v):= ∂t +Λ+(v)∂r,
d
d−(u):= ∂t +Λ−(u)∂r.
(4)

The iteration :
d
d+(v)U = b1(u, v),
d
d−(u)V = b2(u, v). (5)
A mapping is thus determined: T
((
uv
))
=(
UV
)
.
Important properties of mapping T are given in
the following lemmas.

Lemma 1. There exist positive constants δ, M
and 0 < β < 1 such that: T maps S into S and
for any pair F, F̂ in S, there holds d(
T(F), T(F̂))
≤β d
(
F, F̂)
. The constants depend only on the C3
norms of a0, a1, α and D(δ0).
For any F(1) ∈ S, let F(n) = TF(n−1), then
the iteration sequence{
F(n)}
is Cauchy in (W,d)
which is a complete metric space.
The completeness of (W, d) can be proved by
showing d is a metric and the Cauchy sequence

in (W, d) is actually convergent to an element in
the same space; all these are elementary argu-
ments. However since (S, d) is not complete, the
limit is only guaranteed to be in W but might not
stay in S. The limit will become the solution if
it further has certain regularity say differentiable,
which comes out of equi-continuity of the itera-
tion sequence{
F(n)}
which is guaranteed by fol-
lowing lemmas.

Lemma 2. The iteration sequence{
F(n)}
has
property that{
∂rF(n)}
and{
∂tF(n)}
are uniformly
Lipschitz continuous on D(δ).

Proof is complete: A smooth solution at a sonic
curve exists.

Similar transformations are done for the steady
and self-similar Euler systems.

Self-similar Euler: Use
t =√
U2 + V 2 − c2/c, φ
where
φξ = U = u− ξ, φη = V = v − η
is the pseudo-potential.
For steady Euler: Use
t =√
q2 − c2, and φ
where φx = u, φy = v.

Steady Euler in (t, φ):
∂tR− t2µ2
c2S∂φR = − Rq2
2Sc2t{R+S+[2(m+1) cos4 ω−
(m+3)cos2 ω]S}
∂tS− t2µ2
c2R∂φS = − Sq2
2Rc2t{S+R+[2(m+1) cos4 ω−
(m+3)cos2 ω]R}
∂tc− 2t2µ2
c2(R+S)∂φc = −tµ2
c .
Here m = (3− γ)/(γ+1), ω = (α−β)/2, tanα =
Λ+, tanβ = Λ−, µ2 = (γ − 1)/(γ + 1), cos2 ω =
t2/q2, R = ∂̄+c/c, S = ∂̄−c/c.

Thank you.





![arXiv:1703.08832v1 [math.AP] 26 Mar 2017 · APPLICATION OF THE BOUNDARY CONTROL METHOD TO PARTIAL DATA BORG-LEVINSON INVERSE SPECTRAL PROBLEM Y.KIAN1,M.MORANCEY2,ANDL.OKSANEN3 Abstract.](https://static.fdocument.org/doc/165x107/60289e1ad845297c207554d6/arxiv170308832v1-mathap-26-mar-2017-application-of-the-boundary-control-method.jpg)