Convolutional Neural Networks (CNNs) and Recurrent Neural ...

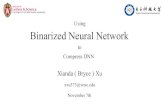
MoNet (Tensorflow)
1.Calc. distance weights for points A
with respect to patch ij (in Zone i)
2.Calc. patch averages of points A
3.Using SNN, connect the final
weights (gij) for each patch with the
target location, patch locations (μij),
and patch averages (Dfij).
4.Calc. target surface ozone (norm.)
Retrieval of Surface Ozone from UV-MFRSR Irradiances using Deep Learning
Maosi Chen 1,†
, Zhibin Sun 1
, John M. Davis 1
, Melina Zempila 1
, Chaoshun Liu 2, Wei Gao
1,3
1 USDA UV-B Monitoring and Research Program, Natural Resource Ecology Laboratory, Colorado State University, Fort Collins, Colora do, USA
2 Key Laboratory of Geographic Information Science, Ministry of Education, East China Normal University, Shanghai, China
3 Department of Ecosystem Science and Sustainability, Colorado State University, Fort Collins, Colorado, USA
Introduction High concentration of surface ozone is harmful to humans and plants. USDA UV-B Monitoring and Research Program (UVMRP) uses Ultraviolet (UV) version of Multi-Filter Rotating Shadowband Radiom-
eter (UV-MFRSR) to measure direct, diffuse, and total irradiances every 3 minutes at 7 UV channels (i.e. 300, 305, 311, 317, 325, 332, and 368 nm channels with 2 nm full width at half maximum). There
have been plenty of literatures exploring retrieval methods of total column ozone from UV-MFRSR measurements, but few has explored the retrieval of surface ozone. Under clear-sky conditions, UV irradi-
ances absorption by ozone are significant and variable by height and wavelength. Therefore, multi-channel UV irradiances at the ground have the potential to resolve ozone concentrations at multiple vertical
layers (including surface ozone). In this study, we used a deep learning algorithm (i.e. Self-Normalizing Neural Network, SNN) to retrieve surface ozone from 3-minute UV-MFRSR direct and diffuse irradi-
ances (and the airmass) under clear-sky conditions at the UVMRP station located at Billings, Oklahoma. The 3-minute surface ozone data for training and validation are accumulated from 1-second surface
ozone measured at the collocated Southern Great Plains (SGP) station by US Department of Energy Atmospheric Radiation Measurement Climate Research Facility (ARM). To cover the cloudy conditions,
we also explored several spatial interpolation techniques [i.e. Triangulation-based linear interpolation, Graph Convolutional Neural Network (GCNN or ChebNet), mixture model network (MoNet), and Re-
current Neural Network (RNN)] to estimate the hourly surface ozone at the same UVMRP station from the adjacent (i.e. within the 3-degree box of) US Environmental Protection Agency (EPA) hourly sur-
face ozone observations.
1. Surface ozone retrieval from UV irradiances
1.1 Dataset 1. Input: UV-MFRSR 3-minute direct normal and diffuse irradiances at 7 channels and the airmass
(7+7+1=15) at UV-B Monitoring and Research Program (UVMRP) Billing, Oklahoma station (36.60°N,
97.49°W) in 2012 and 2016. Cloudy data are excluded by a cloud screening algorithm (Chen et al. 2014).
2. Output: 3-minute surface ozone is averaged from 1-second surface ozone values, which are measured at
the collocated Southern Great Plains (SGP) station by US Department of Energy Atmospheric Radiation
Measurement Climate Research Facility (ARM). The instruments are the Thermo Environmental Instru-
ments, Inc. 49I-A3NAB and 49I-A1NAC Ozone Analyzers in 2012 and 2016, respectively.
Note: a) Randomly select 90% of available 3-min Input-Output pairs for training and use the rest samples
for test. b) Datasets in 2012 and 2016 are trained and tested independently. c) Total number of samples:
7,085 (2012); 5,024 (2016).
Graph CNN (Tensorflow)
1. Construct and rescale multi-level
graph Laplacians.
2. Use Chebyshev polynomials, the
rescaled Laplacian, and the inputs
to construct K-localized kernels at
the given coarsening level recur-
sively.
3. Perform CNN-like convolution, ac-
tivation, and pooling at the coars-
ening level.
4. Repeat steps 2 and 3 until outputs
have no padded nodes (fixed
length).
5. Use SNN to calculate target surface
ozone.
Spatial Distribution of Absolute Test Error (surface ozone)
Performance Summary (20 epochs)
References Chen et al. 2014. A new cloud screening algorithm for ground-based direct-beam solar radiation. JTECH
Defferrard et al. 2016. Convolutional Neural Networks on Graphs with Fast Localized Spectral Filtering.
arXiv:1606.09375
Graves et al. 2013. Speech recognition with deep recurrent neural networks. ICASSP.
arXiv:1303.5778
Klambauer et al. 2017. Self-Normalizing Neural Networks. arXiv:1706.02515
Monti et al. 2016. Geometric deep learning on graphs and manifolds using mixture model CNNs.
arXiv:1611.08402
H31G-1590
+1-970-491-3604
FC: Fully Connected
SELU: Scaled Exponen-
tial Linear Unit
Alpha Dropout: dropout
units are set to -λα to
keep the mean and vari-
ance unchanged. (Klambauer et al. 2017)
1.2 Results
(Monti et al. 2016)
(Defferrard et al. 2016)
RNN (Tensorflow)
1.Input sequence are reference points
ordered by their distances to target
(features: its own norm. lat. &
long., target’s norm. lat. & long.,
and its distance to target)
2.Use RNN (stacked Bi-LSTM) to
encode spatial relationship between
the target and reference points into
a pair of fixed length hidden vectors
from the last Bi-LSTM layer (hB,0 &
hF,T: last hidden vectors from back-
ward and forward passes).
3.Use Fully connected layers (ELU
activated, with dropout) to calc. tar-
get surface ozone.
2. Surface ozone retrieval from EPA stations
2.1 Dataset EPA hourly surface ozone data within 3-degree box of the UVMRP Billings, Oklahoma station in 2016.
Inputs (or reference points) and Output (or target point): In each hour, select one (interior) point as the
target point and the rest as the reference points.
Total number of samples: 214,802. 95% random samples for training, the rest for testing.
Method Training Time
(hour)
Training |Error|
(Mean, std. dev. )
(ppb)
Test |Error|
(Mean, std. dev. )
(ppb)
Tri. linear interpolation - - 3.97, 4.25
Graph CNN 4.80 4.28, 3.80 4.38, 3.94
MoNet 4.40 3.34, 3.16 3.44, 3.27
RNN 14.53 2.43, 2.21 2.89, 2.84
2.2 Results
(Graves et al. 2013) Year
Time (hour) for training different number of SNN layers 400 epochs
1 2 3 4 5 6 7 8 9 10 12 14 16
2012 1.25 1.60 1.80 2.06 2.21 2.42 2.10 3.00 3.16 3.17 3.85 4.16 4.89
2016 1.12 1.23 1.41 1.61 1.72 2.14 2.10 2.18 2.50 2.32 3.00 3.09 3.69
SNN with 6 to 10 layers have the best training and test performance.
Training Time increases linearly with number of SNN layers.
Number of nodes in the first layer around 10-30 times of the input nodes has best performance.
Decreasing number of nodes in layers as an arithmetic sequence is better than a geometric sequence.
ARM surface ozone data have slightly different relationship with UVMRP irradiances in the two years.
![[Presented at AGU-2004 AE23A-0833] R. Sonnenfeld, J ...kestrel.nmt.edu/~rsonnenf/atmospheric/Pubs/AGUPamphlet2.pdf · shaped damper 2.0, made of rip-stop nylon kept the sonde well](https://static.fdocument.org/doc/165x107/5e1161d85b33c5109571d354/presented-at-agu-2004-ae23a-0833-r-sonnenfeld-j-rsonnenfatmosphericpubsagupamphlet2pdf.jpg)











![Solving Difference Equations and Inverse Z Transformsiris.kaist.ac.kr/download/lec_7.pdf · Then use tables to invert the z-transform, e.g. agu[n] z—a Ex. Given a difference equation,](https://static.fdocument.org/doc/165x107/5fb4055b83eb6f2cfd31db29/solving-difference-equations-and-inverse-z-then-use-tables-to-invert-the-z-transform.jpg)