Relatividad General Un siglo con las ecuaciones de Einstein · aparici on de la relatividad general...
126
Relatividad General Un siglo con las ecuaciones de Einstein Enrique F. Borja Versi´ on: 0.1β Sevilla, 2015
Transcript of Relatividad General Un siglo con las ecuaciones de Einstein · aparici on de la relatividad general...
Relatividad GeneralUn siglo con las ecuaciones de Einstein
Enrique F. Borja
Version: 0.1β
Sevilla, 2015
Al final, todo es geometrıa
Indice general
1. Introduccion 7
1.1. ¿Para quien? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2. ¿Que voy a encontrar? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3. ¿Ejercicios? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.4. Errores tipograficos, ortograficos y conceptuales . . . . . . . . . . . . . . . . . . . . . . 10
1.5. ¿Cuando habra mas? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Parte Matematica 13
2. Pinceladas de topologıa 15
2.1. Espacio topologico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2. Funciones continuas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3. Homeomorfismos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3. Cartas, Atlas y Variedades Diferenciales 21
3.1. Cartas coordenadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.2. Atlas y Variedades Diferenciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3
4 INDICE GENERAL
3.3. Funciones entre variedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4. Vectores y Espacios Tangentes 29
4.1. Curvas en Variedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.2. Vector tangente a M en el punto p - Definicion geometrica . . . . . . . . . . . . . . . . 32
4.3. Vector tangente a la variedad M en el punto p - Definicion algebraica . . . . . . . . . 34
4.4. Campos vectoriales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.5. Un vector expresado en dos cartas - Transformacion de coordenadas . . . . . . . . . . 46
4.6. Indices mudos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5. Covectores/1-Formas y Espacios Cotangentes 49
6. Tensores 51
6.1. Operaciones entre tensores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
6.2. La versatilidad tensorial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
7. Metrica 57
7.1. Definicion de Metrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
7.2. Metricas en variedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
7.3. Subir y bajar ındices de tensores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
7.4. Mas sobre contracciones de tensores . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
7.5. Teorema de planitud local . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
8. Derivada Covariante 69
8.1. La derivada covariante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
8.2. Derivada covariante de una 1-forma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
INDICE GENERAL 5
8.3. Corchete de campos vectoriales y la derivada covariante . . . . . . . . . . . . . . . . . 77
8.4. Derivada covariante de un tensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
8.5. Conexiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
8.6. Torsion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
8.7. La conexion metrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
8.8. Transporte paralelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
8.9. Geodesicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
9. Curvatura - El tensor de Riemann 89
9.1. Curvatura y curvas cerradas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
9.2. El tensor de Riemann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
9.3. Desviacion geodesica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
9.4. Las simetrıas del tensor de Riemann . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
9.5. La identidad de Bianchi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
9.6. Las contracciones del tensor de Riemann . . . . . . . . . . . . . . . . . . . . . . . . . . 100
9.7. La identidad de Bianchi contraida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Parte Fısica 103
10.Tensor Energıa-Momento 105
11.La gravedad de Newton 109
11.1. Gravedad Newtoniana y Relatividad Especial . . . . . . . . . . . . . . . . . . . . . . . 110
11.2. El principio de equivalencia de Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
6 INDICE GENERAL
12.El principio de equivalencia en manos de Einstein 113
12.1. La idea mas feliz de su vida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
13.Fısica y Matematicas: Las ecuaciones de Einstein 119
13.1. La hora de la verdad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
13.2. Las ecuaciones de Einstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
14.Bibliografıa comentada 125
14.1. Para la matematica pura y dura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
14.2. Relatividad General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
Capıtulo 1
Introduccion
Aquı tienes un escrito en castellano sobre relatividad general. La idea que tenıa en mente desde
hace tiempo es la de escribir un libro de relatividad general a mi manera. Un libro donde pudiera poner
mi forma de entender la teorıa fısica y el armazon matematico. Ası que lee esto con todas las reservas
del mundo. El estilo es el mıo, no es el estilo convencional de un libro de texto ni he pretendido que
lo sea.
La idea es que con el tiempo aquı vayan apareciendo agujeros negros, cosmologıa, ondas gravitacio-
nales, estructura causal del espaciotiempo y fundamentos matematicos mas elevados como formulacion
variacional, tetradas, espinores, etc.
Como supondras, el libro esta incompleto. Se da un paseo por la geometrıa diferencial basica para
poder llegar a las ecuaciones de Einstein de la relatividad general. El motivo de publicarlo en este
lamentable estado es el de celebrar el siglo que va a cumplir la publicacion de las ecuaciones basicas
de la relatividad general. Y eso es todo, ni mas ni menos.
7

8 CAPITULO 1. INTRODUCCION
1.1. ¿Para quien?
Si te preguntas si este amago de libro esta a tu alcance has de saber una cosa: Este no es un libro
de divulgacion. En el vas a encontrar formalismo pero en un estilo informal. No tiene la estructura de
teorema-demostracion de muchos libros de los de verdad del tema. Tambien es cierto que muchos de
los libros que prefiero para estudiar la relatividad general no tienen esa estructura.
Ası que una vez que hemos aclarado que este no es un texto de divulgacion puedo decir quien creo
yo que puede sacar algun provecho de este texto.
En mi opinion este libro esta pensado para que cualquiera que haya estudiado algebra lineal y
funciones de varias variables pueda seguir todas las explicaciones. Todos los conceptos se han intentado
introducir de una forma amable y sin dramatismos. Si estas en ese caso y te interesa la relatividad
general este puede ser un buen punto de partida.
1.2. ¿Que voy a encontrar?
En esta version se ha intentado ir lo mas directo y rapido posible hasta las ecuaciones de Einstein.
Seguro que has oıdo decir que la relatividad general nos dice que el espaciotiempo se curva por la
presencia de energıa y todo eso. Aquı se explica el ‘todo eso’. Se introduce el concepto de variedad
diferenciable desde la base, se introducen los vectores y los espacios tangentes, los cotangentes, pasamos
a tensores, derivadas covariantes y curvaturas.
He intentado que la cosa fluya de la forma mas suave posible a costa de sacrificar explicaciones de
otros conceptos que, aunque interesantısimos, no son esenciales para el objetivo marcado. Todo esto
en mi opinion, estoy seguro de que hay quien opine que esto es un sacrilegio.
La cosa es tan laxa que no voy he hablado de formas diferenciales, no he hablado de derivadas
1.2. ¿QUE VOY A ENCONTRAR? 9
de Lie, no he introducido los vectores de Killing, etc. La principal causa es mi prisa por sacar esto
a la luz. La secundaria es que no he tenido necesidad imperiosa de usar tales conceptos. Pero no os
preocupeis, apareceran en proximas versiones y todo sera gozo y parabienes. Ademas, creo que si te
zampas estas paginas luego los otros conceptos los consideraras pan comido. Esto es como todo, el
secreto esta en acostumbrarse al tema.
Si nunca has estudiado relatividad general o geometrıa diferencial descubriras un mundo asombroso.
Una nueva forma de ver el espacio que nos rodea y del que formamos parte. La relatividad general
cambio crıticamente la forma en la que se hacıa la fısica teorica. Podemos decir que gracias a la
aparicion de la relatividad general se pudo llegar a la formulacion de las teorıas de las interacciones
fundamentales no gravitatorias. Esas teorıas del electromagnetismo, la interaccion debil o la fuerte,
que se han podido escribir de forma cuantica, se basan en muchos de los conceptos aquı presentados.
Se puede decir que es una buena forma de acercarse a las formulaciones de tales teorıas desde el punto
de vista matematico sin perderse en los vericuetos caminos de lo cuantico.
Una cosilla ası sin importancia. No hay numeracion en las formulas. No te encontraras en ningun
sitio eso de -segun la formula 6,1 se deduce-. Se que los puristas se tiraran de los pelos por ello pero
esta hecho a proposito. Las expresiones que van siendo necesarias en distintas partes se ponen en todas
ellas y cuando no se ponen es por un motivo. La razon es que hay algunas expresiones que uno tiene
que tener en la cabeza y si no estan ahı entonces hay que buscarlas. Una pequena incomodidad agudiza
el ingenio y la memoria. Ademas, yo siempre he disfrutado de ir de adelante a atras y viceversa en un
texto.
Pues eso, el texto acaba justo tras deducir las ecuaciones de Einstein. Pero en un futuro no
determinado vendra con mas y mejor informacion. Palabra de gato.
10 CAPITULO 1. INTRODUCCION
1.3. ¿Ejercicios?
No, no he puesto ningun ejercicio, lo siento. Ya sabeis, la falta de tiempo y las prisas y todo lo
que ya os he contado en las lıneas anteriores. Eso sı, todo el libro este se puede considerar como un
ejercicio.
Serıa deseable y muy beneficioso para los que se acerquen a este texto que intentaran seguir las
explicaciones con lapiz y papel. Con ese lapiz y ese papel serıa genial que se pudieran reproducir todos
los resultados que aquı he puesto.
Al principio, sobre todo cuando se empiezan a jugar con los ındices de los tensores, hay calculos
explicados paso a paso. Conforme el texto avanza los calculos se dejan indicados. ¿Quien soy yo para
privar al potencial lector de deducir una formula?
1.4. Errores tipograficos, ortograficos y conceptuales
Si encuentras algun error o fallo de cualquier tipo no te concedas mucho merito. Estoy seguro de
que dada mi precipitacion al escribir y al publicar se me han pasado por alto muchos errores y fallos
de todo tipo.
Eso sı, no tengas ningun empacho en mostrarme los errores. Para hacerlo mas agil, convendremos
en que me enviais un mail con la cabecera - Fallo gordo en Relatividad General - a:
Por supuesto, tambien acepto crıticas acidas y mordaces. Pero si tienes algo bonito que decir
tampoco te cortes.
1.5. ¿CUANDO HABRA MAS? 11
1.5. ¿Cuando habra mas?
Si ya estas impaciente por leer nuevas versiones solo te puedo decir que las nuevas versiones del
texto iran apareciendo conforme vayan apareciendo. Lo que es seguro es que apareceran cuando esten.
Y casi seguro estaran en algun momento.
¿No se si me he explicado?


Parte Matematica
Variedades diferenciales
Capıtulo 2
Pinceladas de topologıa
En este primer capıtulo vamos a hablar de topologıa. Podrıamos decir que la topologıa es la parte
de la matematica que se ocupa de la continuidad de las funciones definidas entre distintos conjuntos.
No nos convertiremos en expertos topologos pero necesitamos algunas nociones simples para lo que
viene.
2.1. Espacio topologico
Vamos a asumir que tenemos un conjuntoX y que todos tenemos una idea mas o menos aproximada
de que significa conjunto. El conjunto estara formado por una coleccion de elementos de los que
podremos decidir si pertenecen o no al conjunto X, es decir, tendremos clara las relaciones x ∈ X,
x /∈ X. Aquı trabajaremos con conjuntos de infinitos elementos que usualmente llamaremos puntos.
Por ejemplo, el espaciotiempo sera el conjunto de todos los posibles puntos espaciotemporales.
Por otro lado, dado un conjunto X podemos seleccionar algunos elementos que satisfagan alguna
15
16 CAPITULO 2. PINCELADAS DE TOPOLOGIA
propiedad y definir por tanto un conjunto restringido a partir de X, es decir, podemos hablar de
subconjuntos de X.
¿Que es una topologıa? Ahora nos proponemos dar la definicion de topologıa y como tal definicion
no hay que entenderla. Las definiciones no se entienden, las aceptamos, las asumimos y trabajamos
con ellas siempre y cuando no se deduzca de las mismas alguna conclusion que sea inconsistente con
las definiciones establecidas.
Definicion: Espacio Topologico
Dado un conjunto, X, diremos que T es una topologıa de X si:
1. T es una coleccion de subconjuntos de X. T = {Uα}, donde Uα ⊂ X para todo α que toma
valores en un conjunto de ındices.
2. ∅ y X son elementos de T.
3. Uα ∈ T⇒⋃αUα ∈ T.
4. Para un numero finito de subconjuntos de X, {Ui}ni=1 ∈ T⇒⋂i
Ui ∈ T.
La definicion lo que nos dice es que podemos parchear el conjunto X con subconjuntos. Ası que
hacemos una coleccion de subconjuntos, incluyendo el conjunto total y el vacıo, y diremos que es una
topologıa si cumple dos propiedades importantes. Primero, la union arbitraria de parches nos devuelve
un subconjunto que esta contenido en la coleccion inicial. Y segundo, la interseccion finita de parches
seguro que nos devuelve a su vez un subconjunto contenido en la coleccion T. Como esta feo llamar
parche a un subconjunto en matematica se emplea la palabra abierto. Ası que los elementos de una
topologıa T se denominan abiertos de la topologıa.
Si un conjunto X tiene asignada una topologıa, es decir, existe una coleccion de abiertos T que
verifica la definicion, diremos que es un espacio topologico. De hecho, siendo estrictos, el espacio
2.1. ESPACIO TOPOLOGICO 17
topologico es el par (X,T), pero generalmente la topologıa sera conocida y no seremos tan estrictos. Por
supuesto, un mismo espacio puede acomodar distintas topologıas, distintas colecciones de subconjuntos
que verifiquen la definicion, no dudes en recurrir a la bibliografıa para obtener mas detalles.
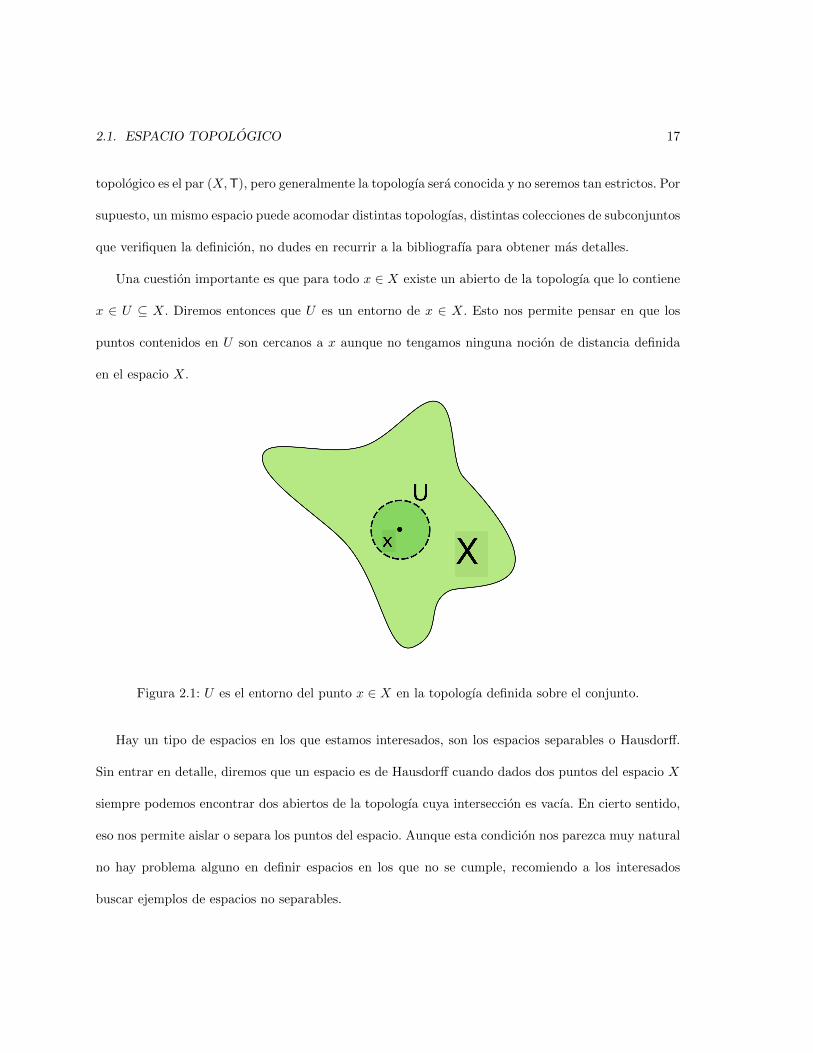
Una cuestion importante es que para todo x ∈ X existe un abierto de la topologıa que lo contiene
x ∈ U ⊆ X. Diremos entonces que U es un entorno de x ∈ X. Esto nos permite pensar en que los
puntos contenidos en U son cercanos a x aunque no tengamos ninguna nocion de distancia definida
en el espacio X.
Figura 2.1: U es el entorno del punto x ∈ X en la topologıa definida sobre el conjunto.
Hay un tipo de espacios en los que estamos interesados, son los espacios separables o Hausdorff.
Sin entrar en detalle, diremos que un espacio es de Hausdorff cuando dados dos puntos del espacio X
siempre podemos encontrar dos abiertos de la topologıa cuya interseccion es vacıa. En cierto sentido,
eso nos permite aislar o separa los puntos del espacio. Aunque esta condicion nos parezca muy natural
no hay problema alguno en definir espacios en los que no se cumple, recomiendo a los interesados
buscar ejemplos de espacios no separables.

18 CAPITULO 2. PINCELADAS DE TOPOLOGIA
Figura 2.2: Ejemplo de espacio Hausdorff
2.2. Funciones continuas
El concepto de continuidad de funciones tiene su expresion mas basica y mas fundamental en
topologıa. Hablando con toda la falta de rigor del mundo podemos decir que una funcion continua es
aquella que envıa puntos cercanos a puntos cercanos. Como acabamos de ver la relacion de cercanıa
en topologıa se resuelve, sin ayuda de distancias definidas, con los entornos de puntos del espacio en
el que estemos trabajando. Por tanto, podemos concluir que una funcion sera continua en el sentido
topologico si aplica entornos abiertos de puntos a entornos abiertos de puntos.
Seamos ahora un poco mas precisos. Disponemos de X e Y , sendos espacios topologicos. Tenemos
definida una funcion f : X → Y . Dado un punto x ∈ X, la funcion f le asociara un punto y = f(x)
en el espacio Y . Ası, si aplicamos f sobre un entorno U de x ∈ X su imagen en Y sera f(U).
Figura 2.3: Accion de f
2.3. HOMEOMORFISMOS 19
Diremos que la funcion f es continua si para cada abierto V en la topologıa de Y se cumple que
f−1(V ) es un elemento de la topologıa de X. Es decir, si la imagen inversa de un abierto siempre es
un abierto, cada uno en su topologıa.
Es esencial notar que aunque se escriba f−1 esto no hace referencia a la inversa de la funcion (que
no sabemos si es invertible o no, no sabemos si es inyectiva y sobreyectiva). A f−1 se la denomina en
este contexto imagen inversa y se define por:
f−1(V ) = {x ∈ X : f(x) ∈ V ⊂ Y }
Como comentario final de esta seccion, me gustarıa resaltar el hecho de que esta definicion de
continuidad en topologıa es equivalente a la definicion ε − δ usual cuando trabajamos con funciones
f : Rn → Rm.
2.3. Homeomorfismos
Trataremos ahora de dar la idea de cuando dos espacios topologicos pueden ser considerados
equivalentes. Esta equivalencia se expresara a traves de un una aplicacion entre ambos espacios y
su inversa de forma que se preserven las topologıas de los mismos. Ya hemos encontrado que las
aplicaciones continuas son aquellas que relacionan los abiertos del espacio de llegada con abiertos del
espacio de partida, por lo tanto son ellas las que preservan la estructura topologica.
Diremos que una funcion entre dos espacios topologicos f : X → Y es un homeomorfismo si cumple
que es una biyeccion y que tanto ella como su inversa son continuas. En este caso, f es invertible y
tiene sentido pensar en f−1 como la funcion inversa asociada.

20 CAPITULO 2. PINCELADAS DE TOPOLOGIA
Capıtulo 3
Cartas, Atlas y Variedades
Diferenciales
Hasta ahora hemos trabajados con espacios topologicos (X,T). En estos espacios no tenemos aun la
suficiente estructura matematica como para poder hacer fısica en ellos. Un punto x ∈ X es una entidad
abstracta, pero para poder hacer fısica hemos de ser capaces de dar coordenadas a los puntos. Ademas,
hemos de saber como hacer derivadas, como definir vectores, como definir distancias y angulos, etc.
El objetivo de este capıtulo es el de aumentar la estructura de un espacio topologico para que esas
esperanzas se puedan hacer realidad.
Para empezar definiremos una variedad M como un espacio topologico que es de tipo Hausdorff y
que no se puede considerar union de dos piezas disjuntas.
21

22 CAPITULO 3. CARTAS, ATLAS Y VARIEDADES DIFERENCIALES
3.1. Cartas coordenadas
Dada una variedad M se dice que el par (U,ϕ) es una carta coordenada n-dimensional cuando U
es un abierto de M (elemento de su topologıa) y ϕ es un homeomorfismo de U en un abierto de Rn.
ϕ : U ⊆M → Rn
Figura 3.1: Carta coordenada
Este punto es importante ya que a traves de la carta podemos considerar un abierto de M como
un espacio Rn y aplicar todo lo que sabemos hacer en esos espacios en la propia variedad. En este caso
diremos que estamos trabajando con una variedad real de dimension n. Estas cartas matematicas es
lo que en fısica denominamos sistemas de coordenadas.
Al trabajar en Rn asociamos a cada punto una n-tupla de valores (x1, x2, . . . , xn). Cuando estamos
tratando con una variedad y queremos describir uno de sus puntos, p ∈ M , hemos de emplear una
carta y ası tendremos ϕ(p) ∈ Rn. Es decir,
ϕ(p) = (ϕ1(p), ϕ2(p), . . . , ϕn(p)).
Ası que cuando hablemos de las coordenadas de un punto de la variedad escribiremos xa, donde
a = 1, 2, . . . , n es un ındice que nos indica la coordenada en cuestion, pero tendremos en mente que
3.1. CARTAS COORDENADAS 23
eso solo es posible gracias a la existencia de la carta que nos permite ir de un abierto de M a Rn.
Un detalle crucial en lo que sigue es que en general no podemos cubrir toda la variedad M con una
carta, de ser ası M serıa esencialmente Rn. Pero no todos los espacios son homeomorfos a un espacio
euclıdeo. ¿Has probado a envolver una pelota con solo una hoja de papel?
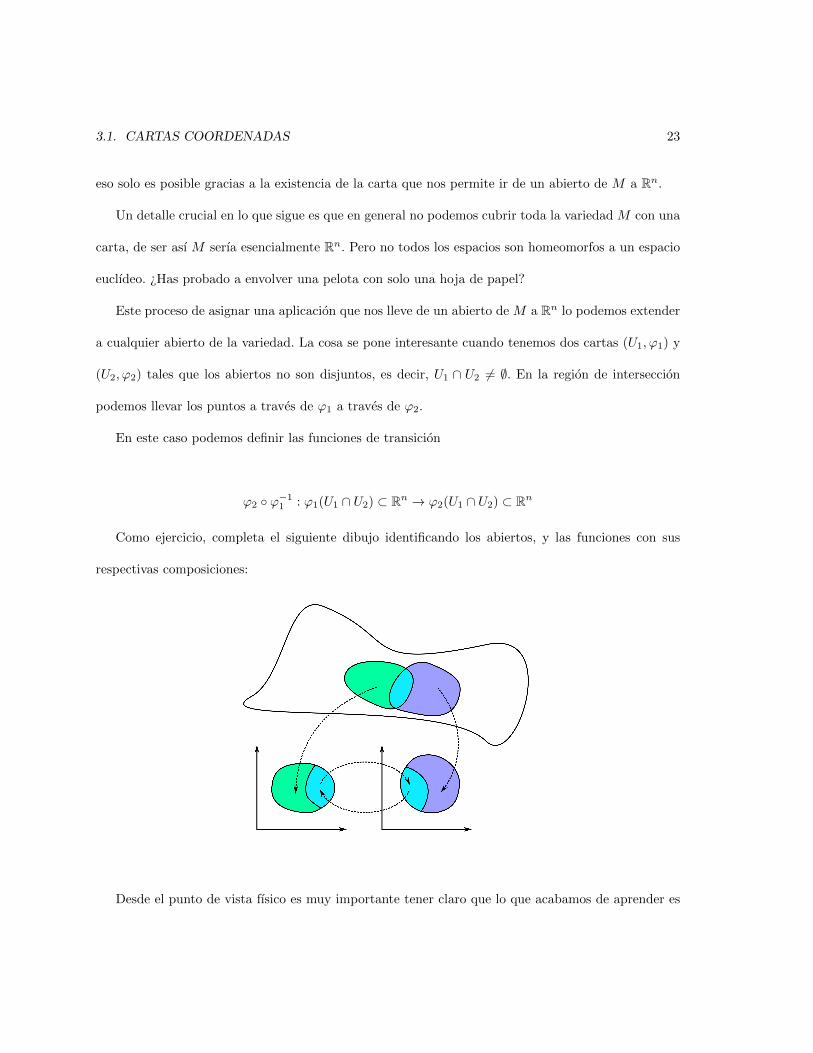
Este proceso de asignar una aplicacion que nos lleve de un abierto de M a Rn lo podemos extender
a cualquier abierto de la variedad. La cosa se pone interesante cuando tenemos dos cartas (U1, ϕ1) y
(U2, ϕ2) tales que los abiertos no son disjuntos, es decir, U1 ∩ U2 6= ∅. En la region de interseccion
podemos llevar los puntos a traves de ϕ1 a traves de ϕ2.
En este caso podemos definir las funciones de transicion
ϕ2 ◦ ϕ−11 : ϕ1(U1 ∩ U2) ⊂ Rn → ϕ2(U1 ∩ U2) ⊂ Rn
Como ejercicio, completa el siguiente dibujo identificando los abiertos, y las funciones con sus
respectivas composiciones:
Desde el punto de vista fısico es muy importante tener claro que lo que acabamos de aprender es
24 CAPITULO 3. CARTAS, ATLAS Y VARIEDADES DIFERENCIALES
a cambiar de coordenadas. Si lo pensamos bien, lo que estamos diciendo es que hay dos descripciones
de los mismos puntos de la variedad M , donde los abiertos de las cartas tienen interseccion, y que
le asignamos diferentes coordenadas a los mismos segun los expresemos con una carta o la otra. Las
funciones de transicion son esenciales para entender como se han de expresar unas coordenadas en
funcion de las otras y viceversa.
3.2. Atlas y Variedades Diferenciales
Una vez que hemos visto las cartas el siguiente paso es evidente, formemos un atlas. Un atlas de
dimension n en la variedad M es una familia de cartas (Ua, ϕa)a∈I , es decir que a toma valores en un
conjunto de ındices I, un contador vamos, de tal forma que:
Se cumple que M =⋃a∈I
Ua
Cada funcion de transicion ϕa ◦ϕ−1b es una funcion continua con infinitas derivadas continuas. A
este tipo de funciones las denominaremos suaves o de tipo C∞. Recordemos que estas funciones
de transicion son funciones en Rn donde tenemos todas las herramientas necesarias para saber
si una funcion es derivable infinitas veces y si cada derivada es continua.
Aquı deberıamos de interesarnos por el concepto de atlas maximal, aquel atlas que contiene todos
los abiertos posibles definidos en M y todas las biyecciones entre los abiertos de M y los abiertos
de Rn cuyas funciones de transicion son suaves. El concepto es simple pero su construccion es ardua
cuanto menos, ası que asumiremos que siempre trabajamos con este tipo de atlas.
Y llegados a este punto podemos dar la definicion de variedad diferenciable.
Definicion: Variedad Diferencial

3.3. FUNCIONES ENTRE VARIEDADES 25
Si en un espacio topologico M que es conexo y Hausdorff construimos un atlas maximal habremos
definido una estructura diferenciable sobre M y diremos que M es una variedad diferencial.
Dado que todas las variedades con las que vamos a trabajar son variedades diferenciales las deno-
minaremos simplemente como variedades sin posibilidad de confusion.
3.3. Funciones entre variedades
Imaginemos ahora que tenemos dos variedades, M y N . Ambas tienen asociada una estructura
diferencial. Las dimensiones de dichas variedades no han de coincidir, por ejemplo supongamos que la
variedad M es m-dimensional y la variedad N es n-dimensional. Eso quiere decir que las cartas de M
van a Rm y las de N van a Rn. Si ahora definimos una funcion f : M → N , ¿como podemos decidir
si esta funcion es suave o no lo es?
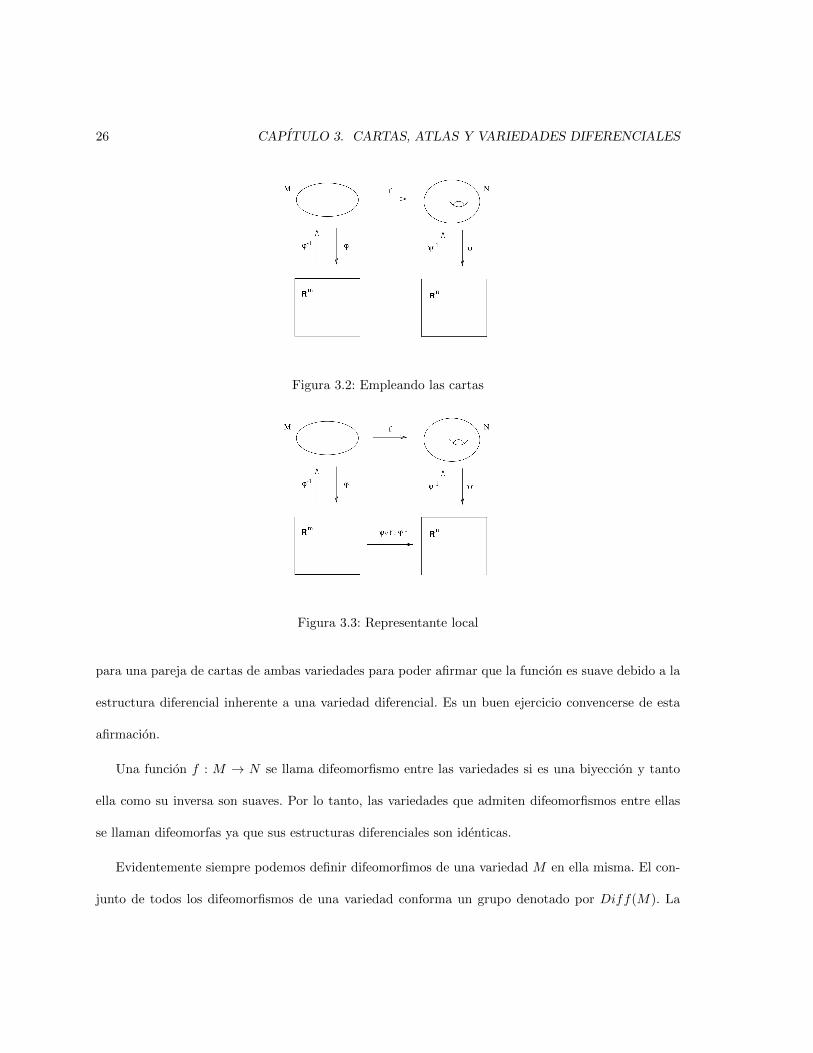
La cuestion se resuelve facilmente si nos vamos a los espacios en los que sı sabemos responder esa
pregunta. Ası que empleemos las cartas como en la figura 3.2.
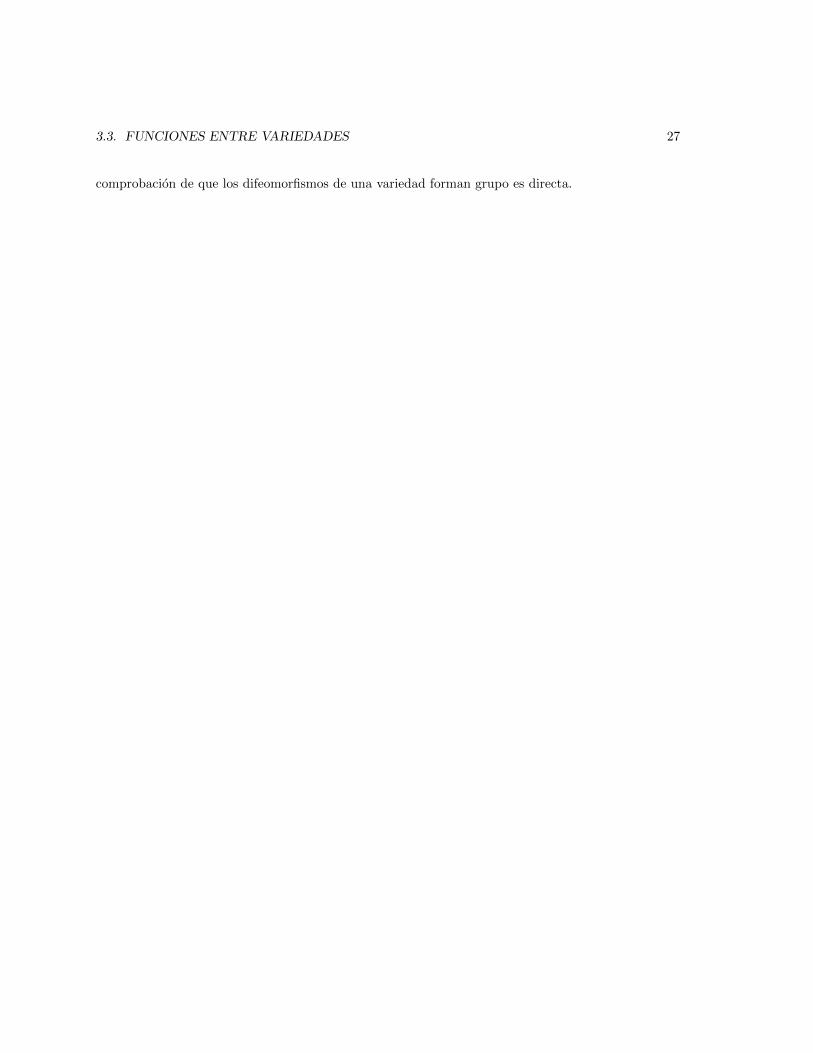
Gracias a las cartas podemos traducir en cierto sentido la funcion entre las variedades a funciones
entre Rm y Rn, para ello construimos, observa la figura 3.3, el representante local de la funcion:
ψ ◦ f ◦ ϕ−1 : ϕ(U) ⊂ Rm → ψ(V ) ⊂ Rn
Dado que ya disponemos de una funcion entre espacios del tipo Rn podremos decidir si la funcion
es suave o no lo es. La funcion sera suave si para todas las cartas de M y N su representante local
es C∞ en el sentido del analisis de varias variables. En realidad, basta mostrar que ese es el caso
26 CAPITULO 3. CARTAS, ATLAS Y VARIEDADES DIFERENCIALES
Figura 3.2: Empleando las cartas
Figura 3.3: Representante local
para una pareja de cartas de ambas variedades para poder afirmar que la funcion es suave debido a la
estructura diferencial inherente a una variedad diferencial. Es un buen ejercicio convencerse de esta
afirmacion.
Una funcion f : M → N se llama difeomorfismo entre las variedades si es una biyeccion y tanto
ella como su inversa son suaves. Por lo tanto, las variedades que admiten difeomorfismos entre ellas
se llaman difeomorfas ya que sus estructuras diferenciales son identicas.
Evidentemente siempre podemos definir difeomorfimos de una variedad M en ella misma. El con-
junto de todos los difeomorfismos de una variedad conforma un grupo denotado por Diff(M). La
3.3. FUNCIONES ENTRE VARIEDADES 27
comprobacion de que los difeomorfismos de una variedad forman grupo es directa.
28 CAPITULO 3. CARTAS, ATLAS Y VARIEDADES DIFERENCIALES
Capıtulo 4
Vectores y Espacios Tangentes
Una variedad M tiene dos estructuras definidas, una topologıa y una estructura diferencial. Sin
embargo, no hay ninguna estructura vectorial asociada y eso supone un problema porque necesitamos
vectores para hacer fısica. Nuestro trabajo en esta seccion es estudiar si es posible definir vectores en
una variedad. Como veremos, hay una construccion muy bella que lo permite y que es consistente con
una interpretacion mas operativa.
Antes de entrar de lleno en el tema que nos ocupa vamos a definir curvas en variedades.
4.1. Curvas en Variedades
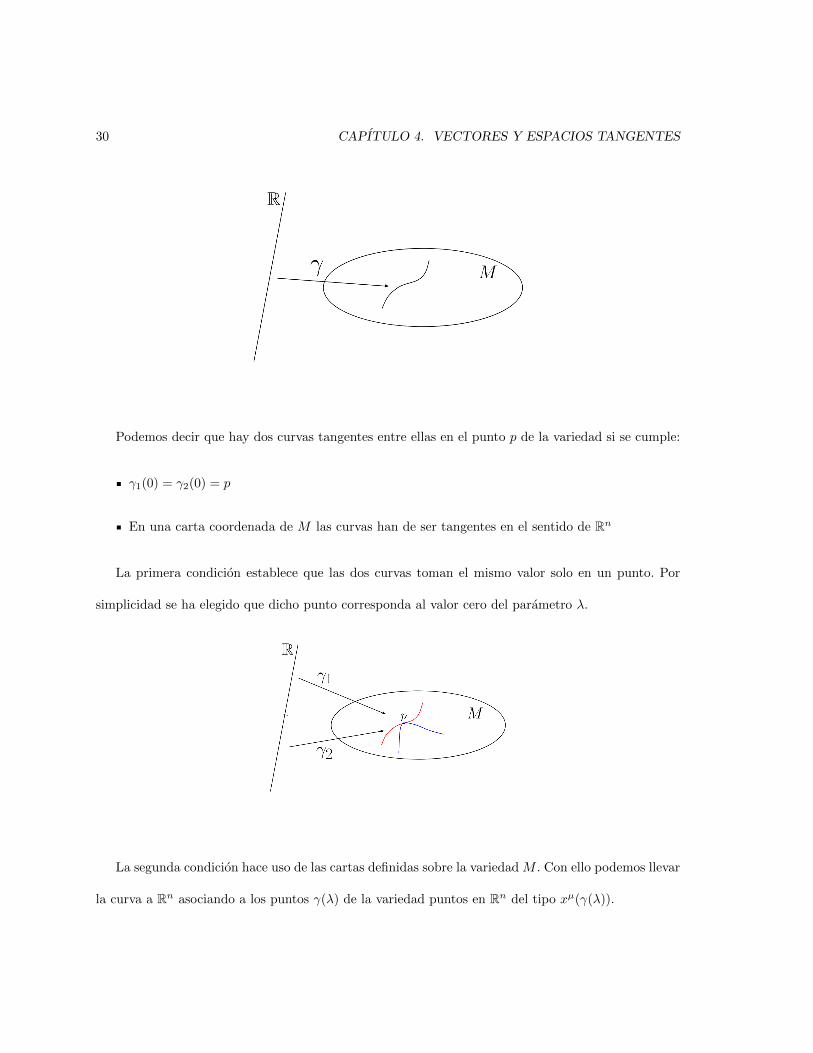
Se llamara curva en la variedad M a una aplicacion suave γ : R→ M que asigna a cada valor en
λ ∈ R, o en un intervalo abierto del mismo, un punto en la variedad dado por γ(λ).
Es importante senalar que la curva es la aplicacion γ no el camino de puntos senalados en la
variedad.
29
30 CAPITULO 4. VECTORES Y ESPACIOS TANGENTES
Podemos decir que hay dos curvas tangentes entre ellas en el punto p de la variedad si se cumple:
γ1(0) = γ2(0) = p
En una carta coordenada de M las curvas han de ser tangentes en el sentido de Rn
La primera condicion establece que las dos curvas toman el mismo valor solo en un punto. Por
simplicidad se ha elegido que dicho punto corresponda al valor cero del parametro λ.
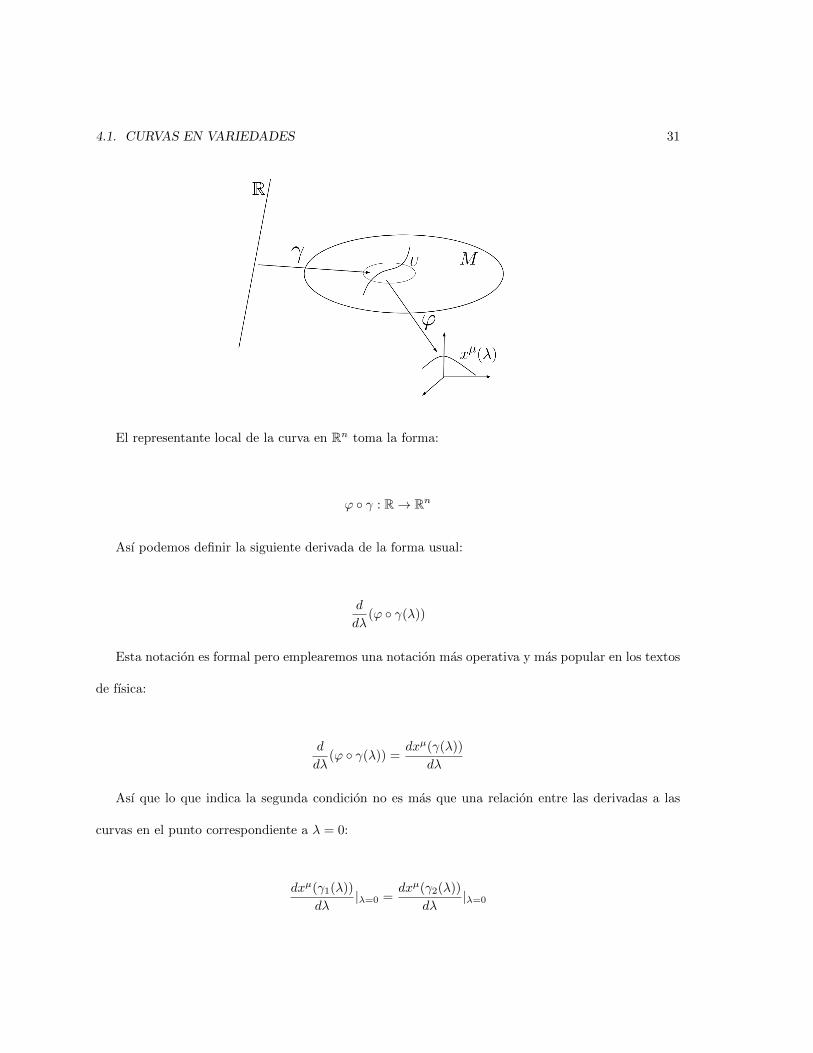
La segunda condicion hace uso de las cartas definidas sobre la variedad M . Con ello podemos llevar
la curva a Rn asociando a los puntos γ(λ) de la variedad puntos en Rn del tipo xµ(γ(λ)).
4.1. CURVAS EN VARIEDADES 31
El representante local de la curva en Rn toma la forma:
ϕ ◦ γ : R→ Rn
Ası podemos definir la siguiente derivada de la forma usual:
d
dλ(ϕ ◦ γ(λ))
Esta notacion es formal pero emplearemos una notacion mas operativa y mas popular en los textos
de fısica:
d
dλ(ϕ ◦ γ(λ)) =
dxµ(γ(λ))
dλ
Ası que lo que indica la segunda condicion no es mas que una relacion entre las derivadas a las
curvas en el punto correspondiente a λ = 0:
dxµ(γ1(λ))
dλ|λ=0 =
dxµ(γ2(λ))
dλ|λ=0
32 CAPITULO 4. VECTORES Y ESPACIOS TANGENTES
Esta expresion, gracias al caracter C∞ de todas las funciones empleadas y a la estructura diferencial
inherente a la variedad, es valida en cualquier sistema de coordenadas.
4.2. Vector tangente a M en el punto p - Definicion geometrica
Gracias a la construccion anterior podemos dar una nocion de vector tangente a la variedad en
uno de sus puntos.
Un vector tangente en p ∈M es una clase de equivalencia de curvas en M tales que la relacion de
equivalencia es la de ser dos curvas que sean tangentes entre sı en el punto p.
v = [γ]
Definir ası los vectores tangentes a una variedad en un punto puede parecer abstracto y poco
operativo. Ciertamente, ası es. Sin embargo, hay un punto clave en esta forma de definir los vectores
tangentes, tan solo se hace uso de elementos propios de la variedad y de funciones definidas sobre y en
ella. Es decir, el concepto de vector tangente a la variedad en un punto es intrınseco a la variedad. No
necesitamos pensar en nuestra variedad como encerrada en un espacio de dimension superior donde
sı estan definidos los vectores de manera usual, la variedad es todo lo que necesitamos.
Vamos a demostrar un teorema.
Teorema: El espacio de todo los vectores tangentes a la variedad M en el punto p forman un
espacio vectorial.
Demostracion:
Tenemos una variedad M y en ella tenemos una carta (U,ϕ), el punto p ∈ U ⊂M la aplicacion ϕ
envıa a p al punto ~0 ∈ Rn.
4.2. VECTOR TANGENTE A M EN EL PUNTO P - DEFINICION GEOMETRICA 33
Tenemos dos clases de equivalencia de curvas diferentes, [γ1] y [γ2]. Tomamos como representantes
de cada clase de equivalencia las curvas γ1 y γ2. Sin perdida de generalidad elegimos las curvas de tal
forma que se cumpla γ1(0) = γ2(0) = p. Y sus imagenes por la carta vienen dadas por ϕ ◦ γ1(λ) y
ϕ ◦ γ2(λ) respectivamente.
Es evidente que γ1 +γ2 no tiene sentido en M . Pero podemos aprovechar los representantes locales
para efectuar una suma en Rn:
(ϕ ◦ γ1(λ)) + (ϕ ◦ γ2(λ)),
esto esta bien definido y es una nueva curva en Rn.
Es inmediato encontrar que esta nueva curva tambien pasa por ~0 ∈ Rn cuando el parametro λ = 0.
Aprovechando que ϕ−1 esta definida por la propia definicion de variedad, podemos llevar esta
curva de Rn a la variedad M :
λ 7→ ϕ−1 ◦ (ϕ ◦ γ1(λ)) + (ϕ ◦ γ2(λ))
Esta curva en M pasa por p ∈M para λ = 0.
Ası podemos concluir que siendo v1 = [γ1] y v2 = [γ2] se cumple que:
v1 + v2 := [ϕ−1 ◦ (ϕ ◦ γ1(λ)) + (ϕ ◦ γ2(λ))]
rv := [ϕ−1 ◦ (rϕ ◦ γ)], para todo r ∈ Rn
Ademas, esto es independiente de la carta elegida y de los representantes de las clases de equiva-
lencias que definen los vectores.
Desde el punto de vista de Rn las anteriores expresiones toman el siguiente aspecto:
34 CAPITULO 4. VECTORES Y ESPACIOS TANGENTES
d
dλ(xµ(γ1(λ)) + xµ(γ2(λ)))|λ=0 =
d
dλ(xµ(γ1(λ)))|λ=0 + d
dλ (xµ(γ2(λ)))|λ=0
d
dλ(rxµ(γ(λ)))|λ=0 = r
d
dλ(xµ(γ(λ)))|λ=0
�
Ası queda demostrado el teorema estableciendo que todos los vectores tangentes a la variedad en
un punto, y esto se puede hace para cualquier punto de la variedad, forman un espacio vectorial.
Acabamos de definir el espacio tangente a la variedad en el punto p que denotaremos por TpM .
4.3. Vector tangente a la variedad M en el punto p - Definicion
algebraica
Vamos a proporcionar ahora otra definicion de vector tangente a una variedad en uno de sus
puntos. El objetivo ahora es que seamos capaces de llegar a expresiones mas adecuadas a la hora de
hacer calculos reales.
Antes de entrar en el mundo de las variedades vamos a concentrarnos en el mundo familiar de
Rn. En este tipo de espacio hay una relacion directa entre vectores tangentes a curvas y derivadas
direccionales.
Un punto de Rn vendra dado por sus coordenadas (x1, . . . , xn) que denotaremos por xµ. Si tenemos
un vector dado por sus componentes en Rn, v = (v1, . . . , vn). Dada una funcion f : Rn → R la derivada
direccional en la direccion indicada por el vector v viene dada por:
vf = v1 ∂f
∂x1+ v2 ∂f
∂x2+ · · ·+ vn
∂f
∂xn
Evidentemente esto se puede escribir como un sumatorio:
4.3. VECTOR TANGENTE A LA VARIEDADM EN EL PUNTO P - DEFINICION ALGEBRAICA35
vf =∑µ
vµ∂f
∂xµ
Y aquı recurriremos a una genialidad de Albert Einstein, tal vez no es espectacular pero simplifica
la vida, que no es poco. La expresion anterior se escribira como:
vf = vµ∂f
∂xµ
Y ası llegamos al convenio de suma de Einstein, cada vez que enfrentemos objetos con ındices arriba
con objetos con ındices abajo repetidos entenderemos que hay que hacer la suma de los productos de
esos objetos para cada valor de los ındices.
Para simplificar aun mas este tipo de expresiones las derivadas parciales∂f
∂xµse escriben simple-
mente como ∂µ. Tras esta revision de la notacion las derivadas direccionales de funciones quedan:
vf = vµ∂µf
Ahora bien, como esta expresion es valida independientemente de la funcion que elijamos para
calcular la derivada direccional podemos considerar que el vector se puede entender como el siguiente
operador:
v = vµ∂µ
Con una simple inspeccion visual podemos identificar {∂µ} como la base en la que expresamos
los vectores, entendidos como operadores de derivacion. Por este motivo, dado que hay n derivadas
independientes, una por cada coordenada de Rn, el espacio vectorial que se obtiene a partir de esa
base, adaptada a las coordenadas, es de dimension n.
36 CAPITULO 4. VECTORES Y ESPACIOS TANGENTES
Volvamos ahora a nuestra variedad M. Intentaremos encontrar de algun modo como identificar los
vectores tangentes a la variedad en un punto con derivadas direccionales de funciones.
Para lo que sigue es bueno tener organizados los ingredientes indispensables:
1. Tenemos una variedad M de n dimensiones.
2. En esa variedad definimos una de sus cartas con el par (U,ϕ) donde ϕ : M → Rn.
3. Trabajaremos con una curva en la variedad, la funcion γ : R→M .
4. Tambien usaremos una funcion suave f : M → R.
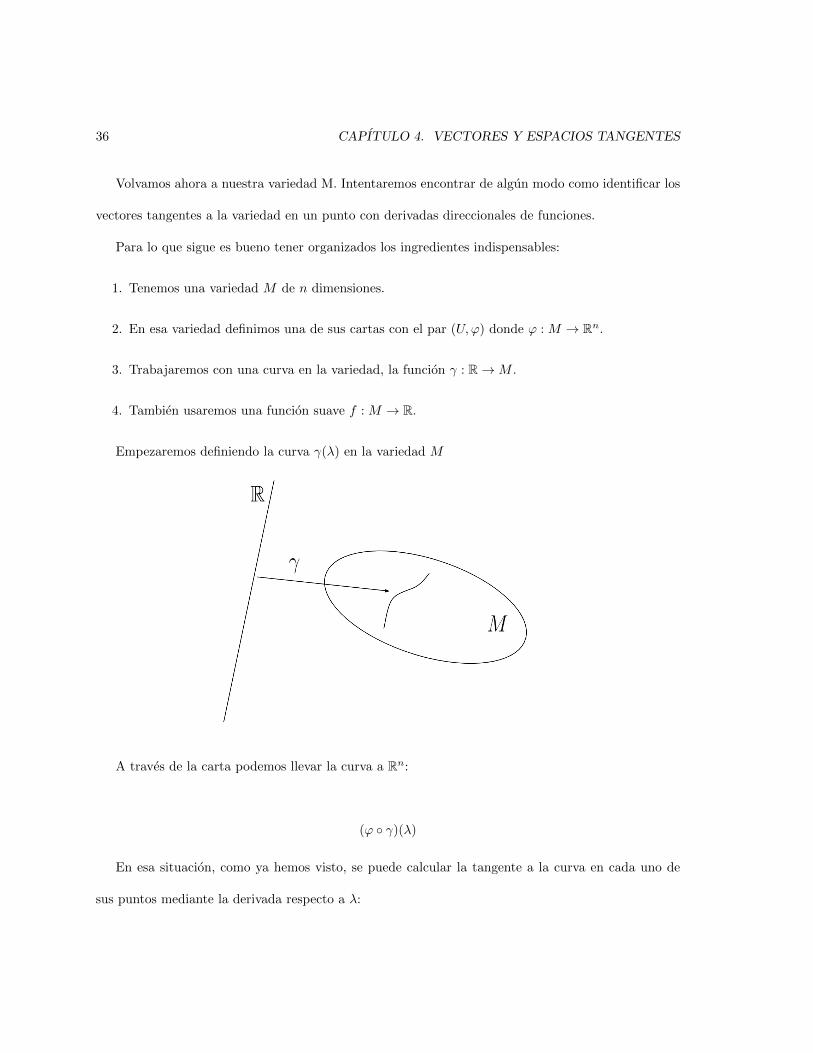
Empezaremos definiendo la curva γ(λ) en la variedad M
A traves de la carta podemos llevar la curva a Rn:
(ϕ ◦ γ)(λ)
En esa situacion, como ya hemos visto, se puede calcular la tangente a la curva en cada uno de
sus puntos mediante la derivada respecto a λ:
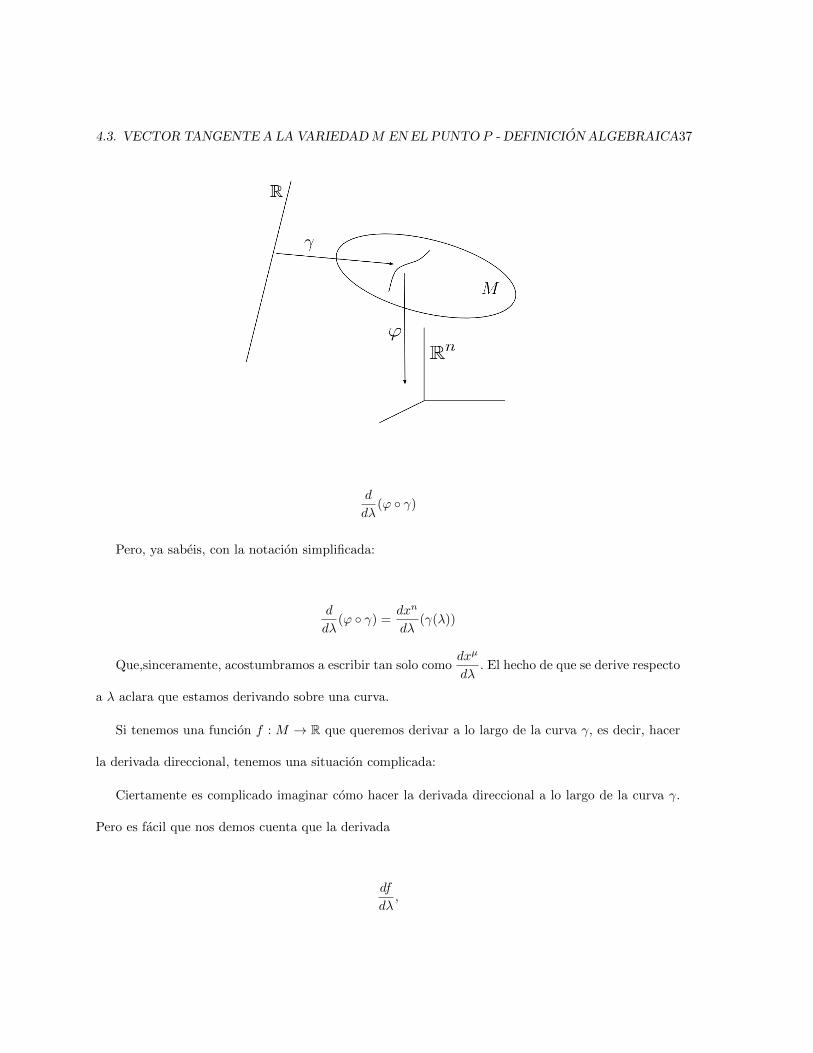
4.3. VECTOR TANGENTE A LA VARIEDADM EN EL PUNTO P - DEFINICION ALGEBRAICA37
d
dλ(ϕ ◦ γ)
Pero, ya sabeis, con la notacion simplificada:
d
dλ(ϕ ◦ γ) =
dxn
dλ(γ(λ))
Que,sinceramente, acostumbramos a escribir tan solo comodxµ
dλ. El hecho de que se derive respecto
a λ aclara que estamos derivando sobre una curva.
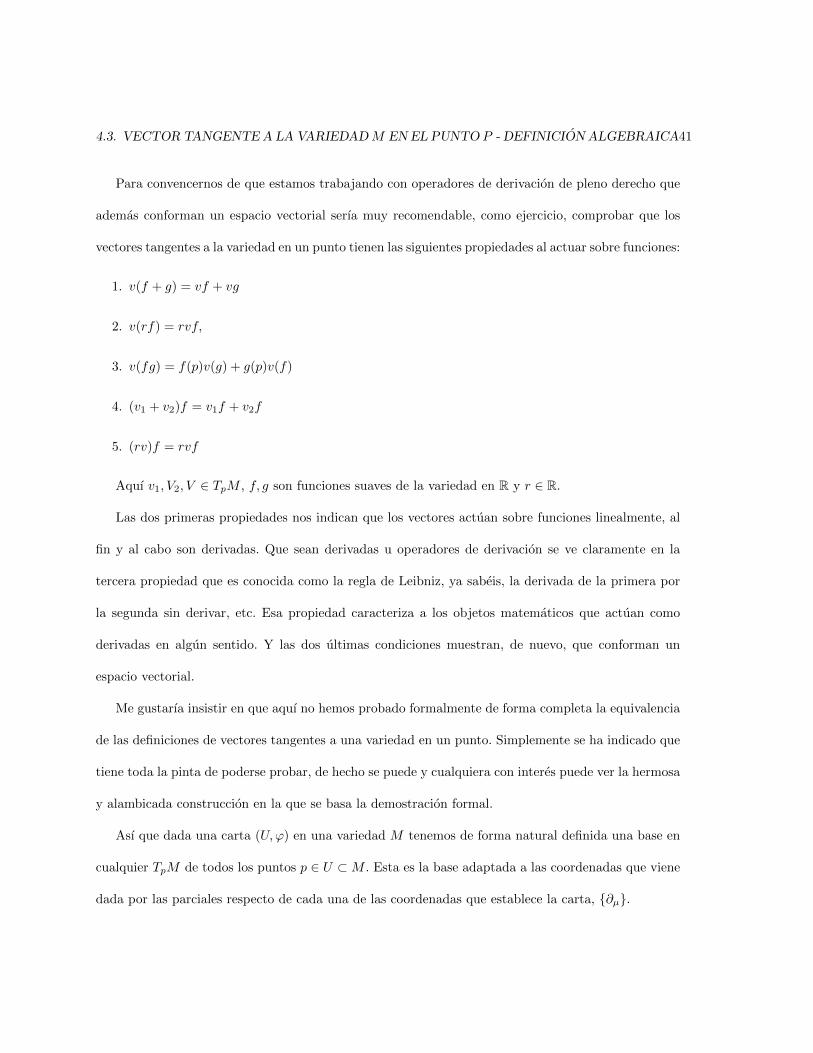
Si tenemos una funcion f : M → R que queremos derivar a lo largo de la curva γ, es decir, hacer
la derivada direccional, tenemos una situacion complicada:
Ciertamente es complicado imaginar como hacer la derivada direccional a lo largo de la curva γ.
Pero es facil que nos demos cuenta que la derivada
df
dλ,
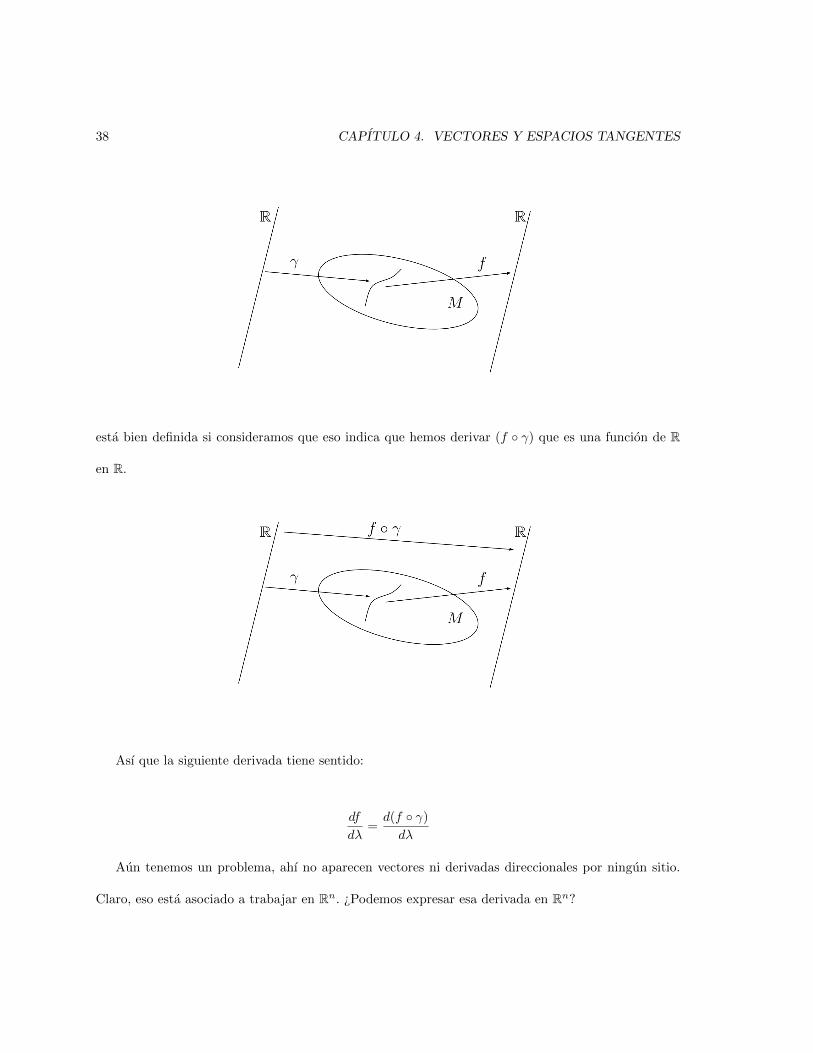
38 CAPITULO 4. VECTORES Y ESPACIOS TANGENTES
esta bien definida si consideramos que eso indica que hemos derivar (f ◦ γ) que es una funcion de R
en R.
Ası que la siguiente derivada tiene sentido:
df
dλ=d(f ◦ γ)
dλ
Aun tenemos un problema, ahı no aparecen vectores ni derivadas direccionales por ningun sitio.
Claro, eso esta asociado a trabajar en Rn. ¿Podemos expresar esa derivada en Rn?

4.3. VECTOR TANGENTE A LA VARIEDADM EN EL PUNTO P - DEFINICION ALGEBRAICA39
Observa esta figura:
Hay un detalle que hemos de considerar, si efectuamos la composicion de la aplicacion de la carta
y su inversa obtenemos una identidad. Es como no hacer nada.
ϕ ◦ ϕ−1 = ϕ−1 ◦ ϕ = I
Y aquı viene la magia de la matematica. Transformemos la expresion (f ◦γ) con una identidad, no
queremos perturbar esa funcion para nada. La cosa quedarıa (f ◦ ϕ−1 ◦ ϕ ◦ γ). En realidad no hemos
hecho nada, pero hemos hecho mucho. Gracias a la propiedad asociativa esto se puede escribir como:
f ◦ γ = (f ◦ ϕ−1 ◦ ϕ ◦ γ) = (f ◦ ϕ−1) ◦ (ϕ ◦ γ)
Ahora sı, ahora tenemos una funcion que va de R a R pero pasando por Rn. De hecho, desde este
punto de vista podemos escribir la derivada anterior del siguiente modo:

40 CAPITULO 4. VECTORES Y ESPACIOS TANGENTES
df
dλ=
d
dλ(f ◦ ϕ)
=d
dλ
[(f ◦ ϕ−1) ◦ (ϕ ◦ γ)
]=
d(ϕ ◦ γ)
dλ
∂(f ◦ ϕ−1)
∂xµ
=dxµ
dλ∂µf
Tan solo hemos tenido que tirar de la regla de la cadena para llegar a ese resultado. Y sı, ahı tenemos
el vector tangente a la curva y actuando como derivacion sobre la funcion. ¡Lo hemos conseguido!
df
dλ=dxµ
dλ∂µf
Podemos concluir entonces que cualquier vector v ∈ TpM puede ser identificado con una derivada
direccional.
Es cierto que podrıas objetar que hemos trabajado con una curva y no con vectores tangentes
pero entonces no tendrıas en la cabeza la primera caracterizacion de dichos vectores que justamente se
construyen a partir de curvas en la variedad. Lo que hemos hecho, tal vez no de la forma mas formal
posible, es mostrar que las clases de equivalencia de curvas que definen los vectores v ∈ TpM actuan
como operadores de derivacion sobre funciones.
Ası, que llegamos a una de las primeras expresiones a grabar en la cabeza en este tema. Un vector
tangente en un punto es un objeto que toma una funcion en la variedad y devuelve un numero y su
definicion es:
v = vµ∂µ
Ası, vf = vµ∂µf
4.3. VECTOR TANGENTE A LA VARIEDADM EN EL PUNTO P - DEFINICION ALGEBRAICA41
Para convencernos de que estamos trabajando con operadores de derivacion de pleno derecho que
ademas conforman un espacio vectorial serıa muy recomendable, como ejercicio, comprobar que los
vectores tangentes a la variedad en un punto tienen las siguientes propiedades al actuar sobre funciones:
1. v(f + g) = vf + vg
2. v(rf) = rvf,
3. v(fg) = f(p)v(g) + g(p)v(f)
4. (v1 + v2)f = v1f + v2f
5. (rv)f = rvf
Aquı v1, V2, V ∈ TpM , f, g son funciones suaves de la variedad en R y r ∈ R.
Las dos primeras propiedades nos indican que los vectores actuan sobre funciones linealmente, al
fin y al cabo son derivadas. Que sean derivadas u operadores de derivacion se ve claramente en la
tercera propiedad que es conocida como la regla de Leibniz, ya sabeis, la derivada de la primera por
la segunda sin derivar, etc. Esa propiedad caracteriza a los objetos matematicos que actuan como
derivadas en algun sentido. Y las dos ultimas condiciones muestran, de nuevo, que conforman un
espacio vectorial.
Me gustarıa insistir en que aquı no hemos probado formalmente de forma completa la equivalencia
de las definiciones de vectores tangentes a una variedad en un punto. Simplemente se ha indicado que
tiene toda la pinta de poderse probar, de hecho se puede y cualquiera con interes puede ver la hermosa
y alambicada construccion en la que se basa la demostracion formal.
Ası que dada una carta (U,ϕ) en una variedad M tenemos de forma natural definida una base en
cualquier TpM de todos los puntos p ∈ U ⊂M . Esta es la base adaptada a las coordenadas que viene
dada por las parciales respecto de cada una de las coordenadas que establece la carta, {∂µ}.
42 CAPITULO 4. VECTORES Y ESPACIOS TANGENTES
La dimension por tanto de cualquier TpM asociado a un punto de la variedad es n. La variedad y
cualquiera de sus espacios tangentes en cualquiera de sus puntos tienen la misma dimension.
Piensa lo que sigue, hemos ampliado la estructura de una variedad. Ahora, ademas de la estructura
diferenciable la variedad tiene asociado de manera natural un espacio tangente, un espacio vectorial,
en cada punto de la misma.
4.4. Campos vectoriales
Hasta ahora hemos trabajado anclados a un punto p de la variedad M . Pero en M quedan infinitos
puntos por ahı que explorar. Lo que esta claro es que en un punto p podremos definir el espacio tangente
en dicho punto TpM y en un punto q tendremos el espacio tangente TqM . De hecho, podemos definir
el TM como el espacio resultante al hacer la union de todos los espacios tangentes de todos los puntos
de la variedad
TM =⋃p∈M
TpM
4.4. CAMPOS VECTORIALES 43
Pensemos que desde el punto de vista algebraico TpM y TqM son isomorfos. Pero hay un detallito
incomodo en esta historia, los espacios tangentes definidos en puntos diferentes de una variedad no se
pueden comparar entre sı. No hay ninguna manera definida de llevar un vector en el TpM a TqM . En
Rn sabemos trasladar vectores, lo hacemos siguiendo un traslado paralelo, podemos tomar cualquier
vector y anclarlo a cualquier punto de Rn. Por desgracia, en una variedad M no hay nocion definida de
paralelismo y por lo tanto no tenemos capacidad de comparar vectores de espacios tangentes asociados
a puntos distintos. Ası que lo que acabamos de exponer aquı se puede definir en: Los espacios tangentes
asociados a distintos puntos de una variedad son isomorfos pero distintos. Lo cual no deja de ser ironico.
En breve veremos como domar este indomito problema.
Pero mientras vamos pensando sobre la problematica que os acabo de descubrir tambien es bueno
pensar en como definir campos vectoriales en una variedad M .
La cuestion es simple, tomamos TM , la union de todos los espacios tangentes de cada punto de la
variedad, y hacemos una asignacion continua y suave de un vector tangente en cada punto.
Espero que te hayan saltado todas las alarmas con lo que acabas de leer. Asignar un vector a cada
punto esta bien, basta con elegir un vector de cada TpM . ¿Pero como demonios vamos a hacer una
asignacion suave si no podemos comparar vectores de espacios tangentes asociados a distintos puntos
de la variedad?
Ese es un punto caliente, sı.
La verdad es que sı que hay una forma para definir una asignacion suave de vectores en cada punto
de la variedad para formar un campo vectorial. El punto clave es notar que para una funcion suave
f : M → R tenemos que V |pf es un numero real. Por lo tanto, un campo vectorial nos darıa un
numero en cada punto de la variedad. Dicho de otra forma, si el campo vectorial es V , V f es una
funcion de la variedad M en R. Convendremos en que el campo vectorial es suave si la funcion que
44 CAPITULO 4. VECTORES Y ESPACIOS TANGENTES
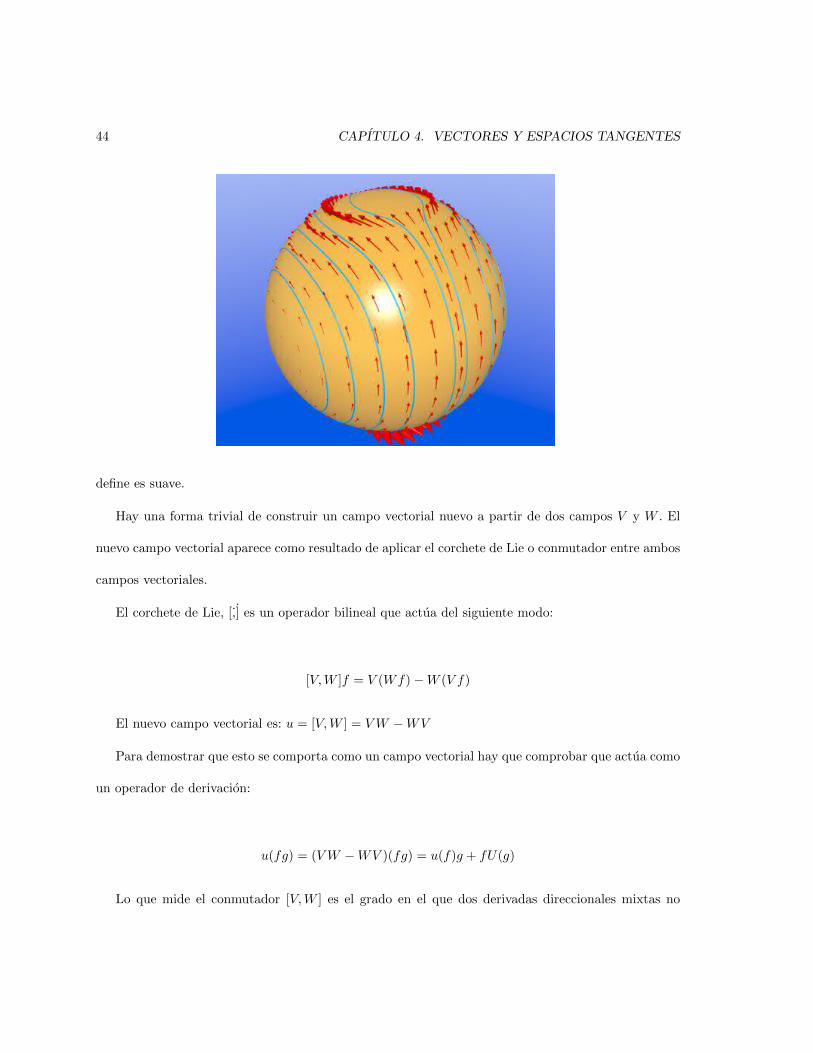
define es suave.
Hay una forma trivial de construir un campo vectorial nuevo a partir de dos campos V y W . El
nuevo campo vectorial aparece como resultado de aplicar el corchete de Lie o conmutador entre ambos
campos vectoriales.
El corchete de Lie, [,] es un operador bilineal que actua del siguiente modo:
[V,W ]f = V (Wf)−W (V f)
El nuevo campo vectorial es: u = [V,W ] = VW −WV
Para demostrar que esto se comporta como un campo vectorial hay que comprobar que actua como
un operador de derivacion:
u(fg) = (VW −WV )(fg) = u(f)g + fU(g)
Lo que mide el conmutador [V,W ] es el grado en el que dos derivadas direccionales mixtas no

4.4. CAMPOS VECTORIALES 45
conmutan.
Como es bien conocido, la base natural coordenada de los campos vectoriales, {∂µ} conmutan entre
sı.
Este es un hecho generico, en cualquier base vectorial adaptada a las coordenadas que se empleen
en cada caso sus elementos conmutan entre sı. Este hecho nos sera util alguna vez.
46 CAPITULO 4. VECTORES Y ESPACIOS TANGENTES
4.5. Un vector expresado en dos cartas - Transformacion de
coordenadas
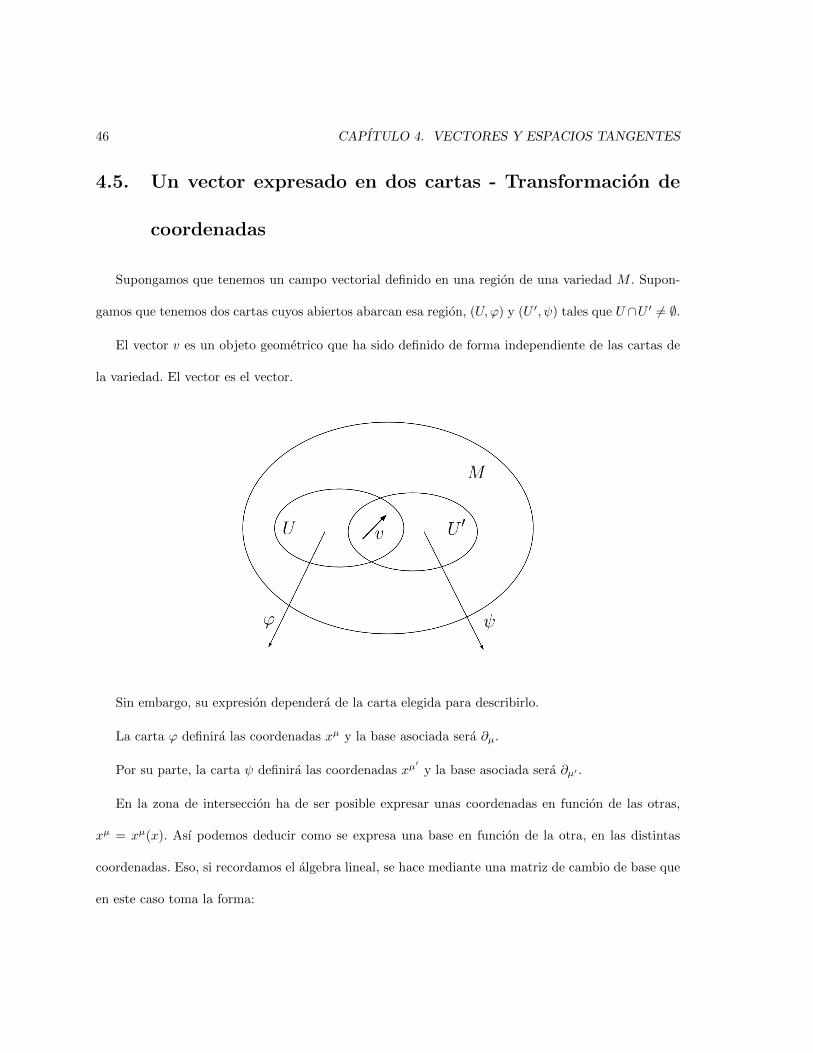
Supongamos que tenemos un campo vectorial definido en una region de una variedad M . Supon-
gamos que tenemos dos cartas cuyos abiertos abarcan esa region, (U,ϕ) y (U ′, ψ) tales que U ∩U ′ 6= ∅.
El vector v es un objeto geometrico que ha sido definido de forma independiente de las cartas de
la variedad. El vector es el vector.
Sin embargo, su expresion dependera de la carta elegida para describirlo.
La carta ϕ definira las coordenadas xµ y la base asociada sera ∂µ.
Por su parte, la carta ψ definira las coordenadas xµ′
y la base asociada sera ∂µ′ .
En la zona de interseccion ha de ser posible expresar unas coordenadas en funcion de las otras,
xµ = xµ(x). Ası podemos deducir como se expresa una base en funcion de la otra, en las distintas
coordenadas. Eso, si recordamos el algebra lineal, se hace mediante una matriz de cambio de base que
en este caso toma la forma:

4.5. UN VECTOR EXPRESADO EN DOS CARTAS - TRANSFORMACION DE COORDENADAS47
∂
∂xµ′ =∂xµ
∂xµ′
∂
∂xµ
Nosotros utilizaremos la notacion:
∂µ′ =∂xµ
∂xµ′ ∂xµ
Esta es la ley de transformacion de las bases vectoriales naturales bajo la transformacion de
coordenadas.
Aprovechando que hemos determinado esta ley de transformacion podemos deducir la transforma-
cion que se produce en las componentes de los vectores.
Para conseguir eso hemos de insistir en el hecho que hemos establecido antes, el vector es el vector,
da igual su expresion en una carta u otra:
v = vµ∂µ = vµ′∂µ′
Como sabemos como se transforman las bases podemos establecer que:
vµ∂µ = vµ′ ∂xµ
∂xµ′ ∂µ
Por lo tanto acabamos con la relacion para las componentes:
vµ = vµ′ ∂xµ
∂xµ′
Dado que∂xµ
∂xµ′ es una matriz de cambio de base es invertible. La inversa no es mas que∂xµ
′
∂xµ
Concluyendo:
48 CAPITULO 4. VECTORES Y ESPACIOS TANGENTES
vµ′
=∂xµ
′
∂xµvµ
Hemos de apreciar que las componentes del vector se transforman de forma inversa que la base.
Este hecho hay que mantenerlo en mente, los objetos con ındices arriba se transforman de forma
inversa a los objetos con ındices abajo.
4.6. Indices mudos
Hemos definido y empleado el criterio de suma de Einstein en expresiones del tipo:
vµ∂µ
Se suele decir que el ındice µ esta contraıdo en la expresion y que es un ındice mudo. Los ındices
mudos se pueden cambiar alegremente siempre que lo hagamos por igual en las expresiones en las que
estan contraıdos:
vµ∂µ = vν∂ρ∂ρ
Esta regla aplica en todas las expresiones con ındices.
Cuando veamos ecuaciones tensoriales hemos de estar seguros de que todos los ındices que no son
mudos, los que no estan contraıdos, estan en las mismas posiciones a ambos lados de la igualdad de la
ecuacion. Guardad este consejo en la memoria, nos simplificara mucho la vida en el futuro proximo.
Capıtulo 5
Covectores/1-Formas y Espacios
Cotangentes
En cuanto disponemos de un espacio vectorial V existe de forma natural otro espacio vectorial, el
espacio dual, V ∗.
El espacio vectorial dual V ∗ esta conformado por las aplicaciones lineales que actuan sobre los
vectores de V y devuelven numeros reales. Los elementos del espacio vectorial dual se denominan
covectores o 1-formas.
Nosotros hemos establecido que para una variedad M y una p ∈ M existe un espacio vectorial
asociado, el espacio tangente en ese punto, TpM . Una 1-forma o covector ω en el punto p es una
aplicacion lineal definida del siguiente modo:
49

50 CAPITULO 5. COVECTORES/1-FORMAS Y ESPACIOS COTANGENTES
ω : TpM → R
v 7→ wv
Las aplicaciones lineales conforman un espacio vectorial, por lo tanto, a cada punto p ∈M podemos
asociar tambien el espacio vectorial de las mismas, el espacio cotangente a la variedad en el punto p,
que denotaremos por T ∗pM . Tambien podemos construir el espacio cotangente de la variedad uniendo
todos los espacios cotangentes de todos los puntos de M :
T ∗M =⋃p∈M
T ∗pM
En terminos de Rn, dada una carta (U,ϕ) en la variedad, sabemos que las 1-formas/covectores
asociadas a las coordenadas son las diferenciales de las mismas, dxµ. Ası, por definicion de base dual:
dxµ∂ν =∂xµ
∂xν= δµν
Una 1-forma/covector general se escribira:
ω = ωµdxµ
Bajo cambio de coordenadas podemos deducir, siguiendo la logica aplicada a los vectores, que:
dxµ′
=∂xµ
′
∂xµdxµ
ωµ′ =∂xµ
∂xµ′ ωµ
Como vemos, las 1-formas transforman sus bases y sus componentes de forma inversa a bases y
componentes de vectores respectivamente.
Capıtulo 6
Tensores
Los tensores, sin duda alguna, estan imbuidos de un halo de misticismo aun entre los propios
estudiantes de fısica o matematica. Son objetos con muchos ındices, arriba y abajo, y perdemos la
capacidad para encontrarles algun sentido tangible. Sin embargo, son objetos cotidianos que hemos
manejado desde siempre, al fin y al cabo, vectores y covectores son ejemplos humildes de tensores.
Como vamos a explicar, los tensores, de los que vectores y 1-formas son un caso como hemos dicho,
son objetos geometricos definidos de forma natural en la variedad. Como tales objetos geometricos su
existencia no esta ligada o comprometida a ninguna carta, a ningun sistema de coordenadas. Por lo
tanto, al expresar la fısica en terminos tensoriales conseguimos que las relaciones entre las magnitudes
fısicas definidas tensorialmente sean validas en cualquier sistema de coordenadas. No habra discusion
al respecto de que este aspecto es muy deseable en fısica.
¿Que es un tensor? Un tensor T es una aplicacion multilineal que transforma un determinado
numero de vectores y covectores en un numero real.
51

52 CAPITULO 6. TENSORES
T : TpM ⊗ TpM ⊗ · · · ⊗ T ∗pM︸ ︷︷ ︸r factores
⊗T ∗pM ⊗ · · · ⊗ T ∗pM︸ ︷︷ ︸s factores
→ R
Eso implica que ese tensor actua sobre r covectores y s vectores y devuelve un numero real. Se
dice entonces que el vector T tiene rango (r, s).
Un tensor se puede expresar en componentes ya que conocemos las bases vectoriales y covectoriales:
T = Tµ1...µrν1...νs∂µ1
⊗ · · · ⊗ ∂µr ⊗ dxν1 ⊗ · · · ⊗ dxνs
A estas alturas es trivial adivinar como se transforman las componentes de un tensor:
Tµ′1...µ
′r
ν′1...ν
′s
=∂xµ
′1
∂xµ1· · · ∂x
µ′r
∂xµr∂xν1
∂xν′1
· · · ∂xνs
∂xν′sTµ1...µr
ν1...νs
Hemos dado la definicion mas basica de tensor pero lo que tomaremos como mantra para determinar
si un objeto matematico es un tensor o no es lo siguiente:
Es tensor lo que se transforma como tensor.
6.1. Operaciones entre tensores
En esta seccion, mientras no se diga lo contrario, trabajaremos con tensores del mismo tipo (r, s)
y en un mismo punto de la variedad. Ası, en algunos casos, denotaremos los tensores por letras en
mayusculas, T , S, A, B, etc, sin indicar sus ındices. Esto es bueno en sı mismo porque pone de mani-
fiesto que son objetos geometricos que no estan comprometidos con ningun sistema de coordenadas.
1. Los tensores son lineales en todos sus argumentos.
6.1. OPERACIONES ENTRE TENSORES 53
2. La composicion de tensores del mismo tipo produce un tensor del mismo tipo: T = aA + bB,
donde a, b ∈ R
Con esto queda claro que el espacio de tensores de rango (r, s) en el punto p ∈M , que denotaremos
por T (r,s)p (M), tiene estructura de espacio vectorial.
Simetrıa de Tensores
Una cuestion de interes es el comportamiento de los tensores al permutar sus ındices entre sı.
Para comenzar a estudiar la simetrıa de los tensores tomemos un caso simple, un tensor de tipo
(0, 2), Xµν .
Diremos que el tensor es simetrico si cumple: Xµν = Xνµ Por contra, el tensor se dira antisimetrico
si cumple: Xµν = −Xνµ
Evidentemente podemos tener tensores sin simetrıa definida. Estos tensores siempre se podran
escribir como una combinacion de una parte simetrica y una parte antisimetrica. Para un tensor Xµν ,
denotaremos su parte simetrica por X(µν) y su parte antisimetrica por X[µν].
Para calcular las partes simetrica y antisimetricas de un tensor de tipo (0, 2) seguiremos las si-
guientes reglas:
X(µν) =1
2[Xµν +Xνµ]
X[µν] =1
2[Xµν −Xνµ]
Estas reglas se pueden generalizar a cualquier numero de ındices, supongamos que tenemos un
tensor Xµ1,...,µp . Su parte simetrica se calculara como:
X(µ1,...,µp) =1
p!
∑σ
Xσ(µ1,...,µp),
54 CAPITULO 6. TENSORES
es decir, sumando todas las posibles permutaciones de los ındices.
Para la parte antisimetrica hemos de hacer una suma alternada, para ello introduciremos el signo
de la permutacion:
X[µ1,...,µp] =1
p!
∑σ
sgn(σ)Xσ(µ1,...,µp).
Como ejemplo, X[abc] =1
6(Xabc −Xacb +Xcab −Xcba +Xbca −Xbac).
La simetrıa o antisimetria de un tensor no es algo restringido a la permutacion entre todos sus
ındices, podemos perfectamente estudiar la simetrıa de algun subconjunto de ındices.
Es decir, si para un tensor se cumple que Sµνρ = Sνµρ, diremos que es simetrico respecto de sus
dos primeros ındices. Igualmente, si tenemos que Aµνρ = −Aρνµ, es antisimetrico en el primer y tercer
ındice.
Podemos hacer la misma discusion para tensores con ındice arriba. Lo que no podemos hacer es
permutar ındices arriba con ındices abajo. Eso no tiene sentido porque estarıamos moviendo elementos
de las bases de vectores y de las bases de covectores y esas bases digamos que se ignoran dentro de
los tensores.
Contracion de ındices
Otra operacion interesante para los tensores es la contraccion. La operacion de contraccion la
podemos definir de manera abstracta con el sımbolo Cont y representa una aplicacion de los tensores
tipo (r, s) a los tensores de tipo (r − 1, s− 1):
Cont : T (r,s) → T (r−1,s−1)
La forma de realizar la operacion es tomar un ındice arriba y un ındice abajo, es decir, seleccionamos
un elemento de la base de vectores y otro de la base de covectores, y forzar a que sean duales entre

6.2. LA VERSATILIDAD TENSORIAL 55
sı, lo que equivale a que tomen los mismos valores. Eso en terminos en terminos de ındices para un
tensor del tipo Tµνρσγ significa:
Tµνρ σγ 7→ Cont(Tµνρ σγ) = Tµνρ σν
En esa situacion tenemos que el tensor T un ındice arriba y un ındice abajo repetidos con lo que
aplica el critero de suma de Einstein. Por lo que el resultado, al sumar sobre todos los valores del
ındice repetido este desaparece, queda:
Tµνρ σγ 7→ Cont(Tµνρ σγ) = Tµνρ σν = Tµρσ
Esta operacion puede parecer esoterica pero estoy seguro de que nos hemos enfrentado a ella en
alguna ocasion. Piensa en este tensor T ji que puede ser considerado como una matriz. Ahora hagamos
la unica contracion posible:
T jj = T,
esto no es mas que la traza de la matriz.
Como es de supone la operacion de contraccion se puede realizar entre cualquier pareja de ındice
arriba y abajo de un tensor por lo que, en general, hay distintas contracciones posibles de un mismo
tensor original. Las contracciones entre diferentes parejas de ındices dan lugar a diferentes tensores
como resultado. Tendremos la oportunidad de ver la contraccion en accion mas adelante.
6.2. La versatilidad tensorial
Hemos definido un tensor (r, s) de forma general como:
56 CAPITULO 6. TENSORES
T : (TpM)r ⊗ (T ∗pM)s → R
Esto implica que un tensor se come r covectores y s vectores para dar lugar a un numero real.
Esto se ve en terminos de las coordenadas de la siguiente forma, tomaremos un tensor del tipo Sµρν
para el ejemplo:
SµρνVρV νωµ
Eso es un numero real. Esta afirmacion se puede confirmar facilmente viendo como se transforma
ese objeto bajo cambio de coordenadas, vereis que no cambia en absoluto, lo que solo ocurre para los
escalares.
Sin embargo, los tensores pueden ser mucho mas versatiles que eso.
Tomemos un tensor Tµν y hagamos que solo actue el ındice inferior. Es decir, solo le enfrentamos
un vector V ν . Como resultado tenemos:
Tµν Vν = Sµ
Es decir: Tµν : TpM → TpM si solo actuamos con el ındice inferior. Es decir, se comporta como
una aplicacion lineal entre espacios vectoriales.
Podrıamos poner mil y un ejemplos del tipo TµρσSσρν = Uµν .
Esto sera una poderosa herramienta de trabajo.
Capıtulo 7
Metrica
En un espacio vectorial V podemos dar la nocion de norma de vectores, su longitud, y angulos
introduciendo una nueva estructura, la estructura metrica.
Para el espacio vectorial mas conocido, R3 sabemos que para calcular la longitud de un vector
empleamos el producto interno. Para v, w ∈ R3 el producto interno se expresa en terminos de las
componentes como:
v · w = v1w1 + v2w2 + v3w3
La norma del vector se calcula a traves de este producto interno como: ||v||2 = v · v
Esto se puede entender como la accion de un tensor de tipo (0, 2) denotado por δ. En terminos de
componentes sera δ = δijdxidxj . Por lo que el producto interno se puede entender como la accion de
la metrica sobre pares de vectores:
v · w = δijviwj
57

58 CAPITULO 7. METRICA
En coordenadas cartesianas las componentes de esta metrica vienen dadas por diag(1, 1, 1).
En relatividad especial trabajamos en un espacio vectorial de cuatro dimensiones, el espacio de
Minkowski, M4. Este espacio no es mas que R4 en el que hemos defnido una metrica η que en terminos
de sus componentes ηµν = diag(−1, 1, 1, 1)
Por lo que el producto interno para dos vectores en el espacio de Minkowski viene dado por:
ηµνvµwν = −v0w0 + v1w1 + v2w2 + v3w3,
donde las componentes de un vector v en el espacio de Minkowski son (v0, v1, v2, v3), siendo v0 la
denominada componente temporal y las tres restantes las componentes espaciales.
Que en la metrica haya una diferencia de signo entre una de sus componentes respecto de las otras
es lo que hace que los resultados de la relatividad especial se alejen de nuestra experiencia cotidiana.
El motivo matematico, entiendase.
7.1. Definicion de Metrica
Vamos a formalizar el concepto de metrica en espacios vectoriales, V . Denominaremos metrica a
un tensor de tipo (0,2) que define una aplicacion del siguiente modo:
g = V × V → R
Esta aplicaciones tiene las siguientes propiedades:
La aplicacion es bilineal:
g(cv + v, w) = cg(v.w) + g(v′, w)
g(v, cw + w′) = cg(v, w) + g(v, w′),
7.2. METRICAS EN VARIEDADES 59
donde v, w, v′, w′ ∈ V y c ∈ R
La aplicacion es simetrica: g(v, w) = g(w, v)
La aplicacion es no dgenerada. Esto implica que si tenemos g(v, w) = 0 para todo w ∈ V entonces
v = 0.
Gracias a una metrica podemos decidir si tenemos vectores ortonormales entre sı. Supongamos que
tenemos los vectores eµ y eν que cuando le aplicamos la metrica obtenemos:
ηµνeµeν =
0 µ 6= ν
±1 µ = ν
Que aparezcan +1 o −1 como modulo cuadrado de un vector depende de si en la metrica hay signos
relativos entre sus componentes. Se define la signatura de una metrica denotada por sig(g) = (p, q),
donde q cuenta los signos positivos en los elementos de la metrica y q cuenta los signos negativos de
la misma.
La metrica del espacio euclıdeo R3 tiene signatura (3, 0). Por contra, la metrica del espacio de
Minkowski tiene signatura (3, 1).
7.2. Metricas en variedades
¿Podemos definir una metrica en una variedad M? Pues depende de si verifica algunas propiedades,
pero como os imaginareis, las variedades en las que hemos estado trabajando cumplen sobradamente
los requisitos que son los que se establecieron cuando introdujimos el concepto de variedad.
60 CAPITULO 7. METRICA
En una variedad M decimos que tiene definida una metrica g en ella cuando en cada p ∈M el TpM
tenemos asociada una metrica g|p. Por lo tanto, la metrica es un campo tensorial con una asignacion
suave en cada punto.
Las metricas en variedades de dimension n en las que estamos interesados aquı se clasifican en dos
grupos dependiendo de su signatura:
g =
sig(g) = (n, 0) Riemanniana
sig(g) = (n− 1, 1) Lorenztiana
En una base coordenada la metrica toma la forma:
g = gµνdxµdxν ⊗ dxν
Aunque es muy normal encontrar la notacion:
ds2 = gµνdxµdxνdxν
Dada una metrica en una variedad podemos hablar de normas de vectores, angulos, areas, volume-
nes, intervalos de tiempo, etc. Tenemos una poderosa herramienta geometrica a nuestra disposicion.
7.3. Subir y bajar ındices de tensores
Como discutimos en la seccion sobre la versatilidad de los tensores, la metrica nos sirve para
encontrar una forma de relacionar vectores y covectores. Podemos considerar la metrica actuando con
solo unos de los ındices con lo que tomara un vector y nos devolvera una 1-forma
7.3. SUBIR Y BAJAR INDICES DE TENSORES 61
g : TpM → T ∗pM
Si tenemos el vector vµ podemos enfrentarlo a la metrica y obtendremos:
vµgµν = vν
El efecto visual es que hemos bajado el ındice del vector. El efecto geometrico es que hemos
encontrado una 1-forma asociada al vector a traves de la metria.
¿Podemos obtener vectores a partir de covectores a traves de la metrica? ¿Podemos bajar ındices
con la metrica?
Pues sı, se puede. La razon es que la metrica es un tensor simetrico no degenerado. La condicion de
que no sea degenerada se traduce en que su determinante, entendiendo la metrica como una matriz,
es no nulo. Por lo tanto, la metrica tiene inversa. La inversa de la metrica se denota con los ındices
arriba gµν .
gµρgρν = δµν
Con la inversa de la metrica podemos subir ındices de covectores y transformarlos en vectores:
gµνωµ = ων
Esto se puede usar con cualquier tipo de tensores, solo hemos de emplear tantas metricas o sus
inversas como ındices queramos bajar o subir de un determinado tensor.

62 CAPITULO 7. METRICA
7.4. Mas sobre contracciones de tensores
Como hemos discutido con anterioridad la contraccion de tensores nos lleva de tensores (r, s) a
tensores (r − 1, s − 1). Esta operacion es propia de los tensores. Imaginemos que disponemos del
siguiente tensor:
Rρ µσν
Con ese tensor es posible obtener tres contracciones diferentes. El ındice de arriba con cada uno
de los ındices de abajo. Supongamos que hacemos la siguiente contraccion:
Rρ µρν = Rµν
Llegados a este punto ya no hay mas contracciones posibles sobre este tensor que obtenemos como
resultado. Recordemos que la contraccion necesitan de un ındice arriba y otro abajo para tener sentido.
¿Podrıamos seguir contrayendo el tensor? Pues sı, en el caso de que en nuestra variedad tengamos
a nuestra disposicion una metrica. Con la metrica podemos subir un ındice y entonces volverıa a ser
posible una nueva contraccion:
gµγRγν = Rµ ν ⇒ Rµ µ = R
Gracias a la metrica y a su capacidad para subir y bajar ındices (convertir vectores en covectores)
podemos llevar la contraccion de un tensor hasta extremos que sin ella no serıan posibles.
7.5. Teorema de planitud local
Consideremos la siguiente metrica:
7.5. TEOREMA DE PLANITUD LOCAL 63
ds2 = dr2 + r2dθ2 + r2sin2θdφ2,
esta es una forma enrevesada de escribir la metrica de R3, es la metrica euclıdea expresada con
coordenadas esfericas. ¿Quiere decir eso que R3 en coordenadas esfericas no es plano? En absoluto, que
una variedad, o espacio, sea plana o curvada es una caracterıstica intrınseca a la misma. La curvatura
no aparece o desaparece del todo por un mero cambio de coordenadas.
Lo que es determinante es que en una variedad o espacio plano siempre es posible encontrar unas
coordenadas en las que la metrica tiene forma canonica, en el caso de R3, diag(1, 1, 1). En una variedad
curva no es posible encontrar tales coordenadas.
Con mas generalidad, un espacio es plano si existe la posibilidad de escribir la metrica de forma
canonica, solo elementos en la diagonal ±1, gµν=g(−1,−1,...,1,1).
Ahora bien, en cualquier variedad podemos escribir la metrica en un punto de forma canonica. Y
lo relevante aquı es -en un punto-. Eso solo sera posible, en general, en un punto y no sera extensible
a ningun entorno del mismo. Todo esto se puede enunciar en forma de teorema.
Teorema: Teorema de la Planitud local
En un punto p de una variedad M siempre es posible encontrar un sistema de coordenadas que
cumpla:
1. La metrica en dicho punto se puede escribir de forma canonica.
2. Todas las primeras derivadas de la metrica se anulan en dicho punto.
A las coordenadas en las que ocurre esto se denominan coordenadas normales.
Demostracion:

64 CAPITULO 7. METRICA
Antes de empezar, una advertencia. La demostracion puede parecer aparatosa, lo es, pero no es
mas que hacer un Taylor y luego un par de cuentas sobre parametros libres (ındices).
Tenemos un sistema de coordenadas arbitrario en un abierto U de la variedad. Tenemos un punto
p ∈ U que vendra descrito a traves de la carta con las coordenadas {xα}.
Ademas, en un entorno del punto p definimos las coordenadas normales como ξµ′. Las coordenadas
del punto p a traves de esa carta las denotaremos por ξµ0′.
Como tenemos dos sistemas de coordenadas en un entorno del punto p es lıcito preguntarnos como
se expresan unas coordenadas en funcion de las otras. Por ejemplo, para el caso de xα = xα(ξµ′). La
matriz de transformacion entre unas y otras vendra dada por:
∂xα
∂ξµ′
Vamos a expandir esta expresion segun Taylor alrededor del punto p en terminos de las coordenadas
ξµ′. Todos los desarrollos los haremos hasta segundo orden:
∂xα
∂ξµ′(x) =
∂xα
∂ξµ′(p) + (ξγ ′ − ξγ ′0)
∂2xα
∂ξγ ′∂ξµ′(p)
+ (ξλ′ − ξλ′0)(ξγ ′ − ξγ ′0)∂3xα
∂ξλ′∂ξγ ′∂ξµ′(p) + . . .
Hagamos ahora la expansion para la metrica:
gαβ(x) = gαβ(p) + (ξγ ′ − ξγ ′0)∂gαβ∂ξγ ′
(p)
+ (ξλ′ − ξλ′0)(ξγ ′ − ξγ ′0)∂2gαβ∂ξλ′∂ξγ ′
(p) + . . .
Una vez que tenemos esas expansiones vamos a emplearlas para expresar como cambia la metrica
bajo el cambio de coordenadas:

7.5. TEOREMA DE PLANITUD LOCAL 65
gµ′ν′ =∂xα
∂ξµ′∂xβ
∂ξν ′gαβ ,
que con los desarrollos anteriores queda a primer orden:
gµ′ν′(x) =∂xα
∂ξµ′(p)
∂xβ
∂ξν ′(p)gαβ(p) + (ξγ ′ − ξγ ′0)
(∂xα
∂ξµ′(p)
∂xβ
∂ξν ′(p)
∂gαβ∂ξγ ′
(p)
+∂xα
∂ξµ′(p)gαβ(p)
∂2xβ
∂ξγ ′∂ξµ′(p)
+∂xβ
∂ξµ′(p)gαβ(0)
∂2xα
∂ξγ ′∂ξµ′(p)
)+ . . .
Ahora contemos elementos libres en los objetos que estamos manejando:
1.∂xα
∂ξµ′(p) en este objeto tenemos 16 elementos libres.
2.∂2xα
∂ξγ ′∂ξµ′(p) aquı tenemos 40 numeros libres.
3.∂3xα
∂ξλ′∂ξγ ′∂ξµ′(p) en este caso los elementos libres suben a 80.
4. gαβ(p) en la metrica tenemos 10 elementos independientes libres.
5.∂gαβ∂ξγ ′
(p) en la primera derivada de la metrica tenemos 40 numeros libres.
6.∂2gαβ∂ξγ ′∂ξµ′
(p) para la segunda derivada encontramos 100 numeros libres.
Para conseguir que la metrica tenga la forma canonica en el punto p, es decir, que gµ′ν′ = ηµ′ν′
tendrıamos que resolver el siguiente sistema:
ηµ′ν′ =∂xα
∂ξµ′(p)
∂xβ
∂ξν ′(p)gαβ(p)
66 CAPITULO 7. METRICA
Eso son 10 ecuaciones para fijar 10 numeros y las derivadas tienen libertad para fijar 16 numeros.
Ası que es posible convertir la metrica a forma canonica y ademas en las matrices de transformacion
quedan libres 6 parametros. Esos son los parametros de las transformaciones de Lorentz que dejan
invariante la metrica de Minkowski que es la que observarıa un observador en el punto p.
Lo siguiente es comprobar que podemos anular todas las derivadas de la metrica. Para ello
tendrıamos que resolver:
∂gµ′ν′
∂ξγ ′(p) = 0
Esas son 40 ecuaciones:
∂xα
∂ξµ′(p)
∂xβ
∂ξν ′(p)
∂gαβ∂ξγ ′
(p) +∂xα
∂ξµ′(p)gαβ(p)
∂2xβ
∂ξγ ′∂ξµ′(p) +
∂xβ
∂ξµ′(p)gαβ(0)
∂2xα
∂ξγ ′∂ξµ′(p) = 0
Pero tenemos 40 parametros libres en las segundas derivadas involucradas, por lo que podemos
hacer que todas las derivadas de la metrica sean nulas en las coordenadas normales.
Para fijar las segundas derivadas de la metrica tendrıamos que resolver 100 ecuaciones, pero para
ellos necesitarıamos hasta las tercera derivada de las coordenadas xα respecto a las normales y ahı
solo tenemos 80 parametros libres. Lo mejor que podemos hacer es anular 80 derivadas segunda de la
metrica pero aun quedarıan 20 que no podrıamos anular simultaneamente.
�
Este resultado nos especialmente util en algunos casos. Dado que las expresiones tensoriales son
validas en todos los sistemas de coordenadas siempre podremos hacer calculos en coordenadas nor-
males, obtener como resultados expresiones tensoriales y estaremos seguros de que son validos en
cualquier sistema de coordeandas que se nos ocurra.
7.5. TEOREMA DE PLANITUD LOCAL 67
Un ultimo detalle que hay que conocer es que este resultado se puede extender no solo a un
punto sino a todos los puntos de una geodesica. Las coordenadas que consiguen eso se denominan
coordenadas de Fermi. Sentıos libres de buscar en la bibliografıa.

68 CAPITULO 7. METRICA
Capıtulo 8
Derivada Covariante
Hemos insistido ya en alguna ocasion en que los tensores son objetos geometricos definidos en una
variedad y que no estan comprometidos con ninguna base coordenada. El tensor es el tensor solo que
dependiendo de la carta que empleemos tendra una representacion coordenada u otra. Lo que sabemos
es que al cambiar de carta el tensor se transforma de una determinada manera, la manera en la que
se transforma un tensor.
La ley de transformacion tensorial es:
Tµ′1...µ
′r
ν′1...ν
′s
=∂xµ
′1
∂xµ1· · · ∂x
µ′r
∂xµr∂xν1
∂xν′1
· · · ∂xνs
∂xν′sTµ1...µr
ν1...νs
Con todas estas motivaciones supongo que estareis deseando empezar a hacer fısica y que tendreis
en mente escribir las ecuaciones en forma tensorial para no comprometernos con ningun sistema de
coordenadas. Pero si uno intenta describir una ley fısica, por simple que sea, es difıcil no encontrarse
con una derivada. Y las derivadas traen los problemas. Resulta que en las variedades la unica forma
que tenemos para derivar hasta ahora viene de la mano de las ∂µ. Cuando aplicamos esas derivadas a
69
70 CAPITULO 8. DERIVADA COVARIANTE
un tensor lo que esperamos es que el resultado vuelva a ser un tensor. Comprobemoslo.
Tenemos un un campo vectorial V que en una carta alrededor de un punto tiene por componentes
V µ que, efectivamente, es un tensor de tipo (1, 0). Ahora vamos a derivar el vector, ∂νVµ. Esto tiene
toda la pinta de que hemos convertido un tensor de tipo (1, 0) en un tensor (1, 1). Pero, desgraciada-
mente se queda solo en la pinta. Veamos como se comporta ∂νVµ bajo cambio de coordenadas.
Supongamos que ese objeto en unas coordenadas {xα′} se expresa como ∂α′V β ′, la relacion de este
objeto con estas coordenadas y el mismo objeto con las coordenadas {xµ} viene dado por:
∂α′V β ′ = ∂α′
(∂xβ ′
∂xµV µ)
︸ ︷︷ ︸transf. componentes
=∂xν
∂xα′∂ν︸ ︷︷ ︸
transf. base
(∂xβ ′
∂xµV µ)
Ahora calculamos las derivada ∂ν sobre el objeto de su derecha:
∂α′V β ′ = ∂α′
(∂xβ ′
∂xµV µ)
=∂xν
∂xα′∂ν
(∂xβ ′
∂xµV µ)
=∂xν
∂xα′∂xβ ′
∂xµ∂νV
µ +∂xν
∂xα′∂2xβ ′
∂xν∂xµV µ
Ası que la ley de transformacion de la derivada de un vector queda:
∂α′V β ′ =∂xν
∂xα′∂xβ ′
∂xµ∂νV
µ +∂xν
∂xα′∂2xβ ′
∂xν∂xµV µ︸ ︷︷ ︸
transf. no tensorial
Concluimos dos cosas: La primera es que la derivada parcial de un vector no es un tensor (esto
ocurre con cualquier tensor) y la segunda, que tenemos un problema. El motivo oculto que hay para
que la derivada parcial de un tensor no devuelva otro tensor es que en el concepto de derivada hay que
tomar la diferencia de dos tensores en dos puntos distintos de la variedad. Los tensores se construyen
a partir de vectores y covectores. Hacer la diferencia de dos tensores en dos puntos distintos implica

8.1. LA DERIVADA COVARIANTE 71
que estamos comparando vectores y covectores anclados a dos puntos distintosde la variedad y eso no
esta definido ya que viven en espacios diferentes.
8.1. La derivada covariante
Ante la situacion que se nos plantea parece que hay un horizonte oscuro en lo que respecta a hacer
fısica con tensores. Pero claro, si estas leyendo esto habras adivinado que hay una solucion porque
llegar hasta aquı para descubrir que esto no sirve para lo que nos proponemos serıa un poco raro. La
solucion viene de la mano de la derivada covariante.
La derivada covariante es una aplicacion del espacio de tensores (r, s) en los tensores (r, s + 1).
Nada mas y nada menos. Denotaremos la derivada covariante por, ∇.
Es evidente que ese objeto no aparece de forma natural en las variedades como ası lo hacen
las derivadas parciales que son las bases de los vectores tangentes a la variedad en cada punto. Lo
que vamos a hacer es construir una derivada que transforme tensores en tensores. Como la vamos a
construir vamos a ir poniendole condiciones.
Como hemos dicho queremos construir una derivada que haga esto:
∇ : T (r,s) → T (r,s+1)
Y ahora pongamonos exigentes con ella. Queremos que nuestra derivada covariante cumpla lo
siguiente:
Para dos tensores T y S y numeros reales a y b: ∇(aT + bS) = a∇T + b∇S. Ha de ser lineal
como toda buena derivada.
72 CAPITULO 8. DERIVADA COVARIANTE
Tambien ha de cumplir: ∇(TS) = T∇S + S∇T . Porque eso es lo que hacen las derivadas,
respetar la regla de Leibniz.
A la derivada covariante le vamos a exigir que conmute con la contraccion de ındices de los
tensores. Puedo derivar de forma covariante y luego contraer el resultado o primero contraer y
luego hacer la derivada covariante.
Ha de ser consistente con la nocion de que los vectores tangentes son derivadas direccionales
de funciones suaves de la variedad. Es decir, para un v ∈ TpM tenemos que: v(f) = vµ∂µf .
Nosotros queremos que sea posible cambiar las derivadas parciales de nuestras formulas por
derivadas covariantes ası que esperamos que v(f) = vµ∇µf exprese la derivada direccional
correctamente. Dicho de otro modo, queremos que la derivada covariante sea igual a la derivada
parcial cuando actua sobre funciones suaves: ∇µf = ∂µf .
Por ultimo vamos a exigirle a la derivada covariante que las derivadas mixtas sobre funciones
suaves en la variedad conmuten:∇µ∇µf = ∇ν∇µf . Esto se suele decir que la derivada covariante
sea libre de torsion.
Ya tenemos todo listo para poder construir nuestra nueva forma de derivar en una variedad. Lo que
vamos a hacer a partir de ahora es totalmente correcto pero es totalmente informal. La teorıa de las
derivadas que vamos a trabajar ahora es muy rica y muy importante en fısica, no solo en relatividad
general si no en el estudio de las teorıas gauge.
Partimos de un objeto ∇. Claro esta, aun no sabemos nada de ∇ ası que tomamos la lista de
propiedades que tiene que tener y tomando las dos primeras podemos hacer la siguiente hipotesis. La
derivada covariante ha de satisfacer la linealidad y la regla de leibniz que satisfacen todos los objetos
matematicos que denominamos derivaciones. Podemos pensar que nuestra derivada covariante sera la
8.1. LA DERIVADA COVARIANTE 73
derivada parcial conocida, ∂, mas una transformacion lineal que denotaremos por Γ.
∇ = ∂ + Γ
Ahora tenemos que saber que forma tienen la Γ. Para ello vamos a aplicar la derivada covariante a
un vector V ν . Como hemos dicho la derivada covariante convierte a tensores de tipo (r, s) en tensores
de tipo (r, s+ 1), ası nuestro vector pasara a ser un objeto con dos ındices:
∇µV ν
Ahora pongamos la expresion completa que hemos imaginado para la derivada covariante, recordad
que hemos de ser consistentes con los ındices en todo momento:
∇µV ν = ∂µVν + ΓνµλV
λ
Hemos elegido que Γ represente sea una matriz de n×n para cada valor del ındice inferior, es decir,
(Γµ)νλ. El ındice el vector se ha de contraer con el ındice inferior de Γ como matriz para cada valor
del ındice inferior, el de la derivada covariante, µ. En terminos matematicos Γρµν son los coeficientes
de una conexion. Ahondaremos mas en esto un poco mas adelante.
Una cuestion importante que hemos de dilucidar es la relativa a la transformacion de Γ bajo cambio
de coordenadas. Para obtener su ley de transformacion vamos a recordar que nosotros queremos que
la derivada covariante se transforme como un tensor, es decir:
∇µ′V ν ′ =∂xα
∂xµ′∂xν ′
∂xβ∇αV β
La expresion de la derivada covariante en las coordenadas prima sera:
74 CAPITULO 8. DERIVADA COVARIANTE
∇µ′V ν ′ = ∂µ′V ν ′ + Γν′
µ′λ′V λ′
Nostros no sabemos como se transforman las Γ pero el resto de objetos de esa expresion sı sabemos
transformarlos:
∇µ′V ν ′ =∂xα
∂xµ′∂xν ′
∂xβ∂αV
β +∂xα
∂xµ′∂2xν ′
∂xα∂xβV β + Γν
′
µ′λ′∂xλ′
∂xβV β
Si imponemos que la transformacion sea tensorial el lado de la izquierda se transformara tenso-
rialmente:
∂xα
∂xµ′∂xν ′
∂xβ∇αV β =
∂xα
∂xµ′∂xν ′
∂xβ∂αV
β +∂xα
∂xµ′∂2xν ′
∂xα∂xβV β + Γν
′
µ′λ′∂xλ′
∂xβV β
Desarrollando la derivada covariante de la parte izquierda de la expresion tenemos:
∂xα
∂xµ′∂xν ′
∂xβ∂αV
β +∂xα
∂xµ′∂xν ′
∂xβΓβαλV
λ =∂xα
∂xµ′∂xν ′
∂xβ∂αV
β +∂xα
∂xµ′∂2xν ′
∂xα∂xβV β + Γν
′
µ′λ′∂xλ′
∂xβV β
Los dos primeros terminos a ambos lados de la igualdad son identicos ası que cancelan entre sı. La
cosa, tras reordenar un poco, queda:
∂xα
∂xµ′∂2xν ′
∂xα∂xβV β + Γν
′
µ′λ′∂xλ′
∂xβV β =
∂xα
∂xµ′∂xν ′
∂xβΓβαλV
λ
Podemos renombrar todos los ındices mudos en la expresion para que sean el mismo:
∂xα
∂xµ′∂2xν ′
∂xα∂xλV λ + Γν
′
µ′λ′∂xλ′
∂xλV λ =
∂xα
∂xµ′∂xν ′
∂xβΓβαλV
λ
Esta relacion ha de ser cierta para cualquiera que sea el vector V λ por tanto podemos prescindir
de el:
8.2. DERIVADA COVARIANTE DE UNA 1-FORMA 75
∂xα
∂xµ′∂2xν ′
∂xα∂xλ+ Γν
′
µ′λ′∂xλ′
∂xλ=∂xα
∂xµ′∂xν ′
∂xβΓβαλ
Ahora procedemos a aislar la Γν′
µ′λ′ sin mas que multiplicar toda la expresion por la transformacion
inversa a la que la acompana,∂xλ
∂xλ′ . Tras eso y reordenado terminos llegamos a:
Γν′
µ′λ′ =∂xα
∂xµ′∂xλ
∂xλ′
∂xν ′
∂xβΓβαλ −
∂xα
∂xµ′∂xλ
∂xλ′
∂2xν ′
∂xα∂xλ
Con esto hemos encontrado como se transforman los coeficientes de la conexion, los coeficientes Γ.
Esta claro que la conexion no se transforma tensorialmente, nadie dijo que tuviera que hacerlo, lo que
sı tiene que hacer es compensar los terminos no tensoriales de la transformacion de la derivada y eso
vaya si lo hace.
Hay que tener siempre en mente que uno de los ındices de la conexion es un contador y que en
terminos matematicos la conexion no es un tensor, ası que no intentemos subir o bajar ındices de Γ si
no es estrictamente necesario y sabemos muy bien lo que estamos haciendo.
8.2. Derivada covariante de una 1-forma
Ahora podrıamos decidir hacer una derivada covariante de una 1-forma. La forma generica de esta
derivada covariante serıa:
∇µων = ∂µωµ + Γλµνωλ
En principio los coeficientes Γ y Γ no tienen ningun motivo para estar relacionados entre sı. Las
Γ son un nuevo conjunto de matrices. Eso sı, a vista de la expresion su ley de transformacion ha
de ser identica que para las Γ empleadas en la derivada covariante de vectores. Recordemos que la
76 CAPITULO 8. DERIVADA COVARIANTE
ley de transformacion no depende el vector sobre el que derivamos y que el termino no tensorial de
la transformacion unicamente involucra coordenadas. Sin embargo, y afortunadamente, Γ y Γ estan
relacionadas entre sı.
Para encontrar la relacion hagamos la derivada covariante de ωλVλ que es un numero real. Por lo
tanto la derivada covariante sobre ese objeto ha de coincidir con la derivada parcial:
∇µ(ωλVλ) = ∂µ(ωλV
λ) = (∂µωλ)V λ + ωλ(∂µVλ)
Empleemos ahora el hecho de que la derivada covariante tambien verifica la regla de Leibniz:
∇µ(ωλVλ) = (∇µωλ)V λ + ωλ(∇µV λ)
Desarrollemos las derivadas covariantes de la derecha en funcion de su expresion completa, recor-
demos que hemos de emplear Γ cuando actuemos sobre 1-formas y Γ cuando actuemos sobre vectores:
∇µ(ωλVλ) = (∂µωλ)V λ + ΓσµνωσV
λ + ωλ(∂µVλ) + ΓσµλωσV
λ
La unica forma de que eso se reduzca a la aplicacion de las parciales, como tiene que ser ya que
estamos haciendo la derivada covariante de una funcion escalar, es que se cumpla:
ΓσµνωσVλ + ΓσµλωσV
λ = 0
Esa expresion ha de ser la misma independientemente de la 1-forma y el vector, con eso llegamos
a la relacion que buscabamos:
Γσµν = −Γσµλ

8.3. CORCHETE DE CAMPOS VECTORIALES Y LA DERIVADA COVARIANTE 77
Concluyamos esta seccion con la forma definitiva de la derivada covariante sobre 1-formas:
∇µων = ∂µωµ − Γλµνωλ
8.3. Corchete de campos vectoriales y la derivada covariante
Un campo vectorial, como ya sabemos, es una asignacion suave de vectores tangentes a cada punto
de la variedad M . Con ellos podemos calcular la derivada direcciona en cada punto de una funcion
suave definida sobre la variedad:
v(f) = vµ∂µf
Mirando esa expresion nos encontramos con una derivada parcial actuando sobre una funcion.
Como hemos visto eso ha de ser igual a la actuacion de la derivada covariante actuando sobre la
funcion:
v(f) = vµ∂µf = vµ∇µf
A veces se expresa esa agrupacion, que es un numero real, del siguiente modo:
v(f) = vµ∇µf = ∇vf,
donde ∇vf indica que estamos haciendo la derivada covariante en la direcion indicada por el vector v.
Como habıamos visto hay una forma de encontrar un campo vectorial a partir de dos campos
conocidos. Dados los campos v y w, podemos formar un nuevo campo a traves del corchete de Lie de
los mismos:

78 CAPITULO 8. DERIVADA COVARIANTE
[v, w] = vw − wv
En realidad, lo que tiene sentido es la aplicacion del corchete sobre una funcion suave definida
sobre la variedad en la que trabajamos:
[v, w] f = v(wf)− w(vf)
Desarrollando la parte derecha obtenemos:
[v, w] f = vµ∂µ(wν∂νf)− wν∂ν(vµ∂µf)
Dado que todos los ındices son mudos es lıcito escribir:
[v, w] f = vµ∂µ(wν∂νf)− wµ∂µ(vν∂νf)
Los unicos terminos que sobreviven si realizamos el calculo completo son:
[v, w] f = vµ(∂µwν)(∂νf)− wµ(∂µv
ν)(∂νf)
Aunque las manipulaciones nos distraigan ahı solo hay derivadas parciales actuando sobre funciones
escalares solo que hemos masajeado un poco la expresion para que fuese mas comoda para nosotros.
Lo se, no lo parece, pero es ası. Por lo tanto, es legal cambiar las parciales por derivadas covariantes:
[v, w] f = vµ(∇µwν)(∇νf)− wµ(∇µvν)(∇νf) = (vµ(∇µwν)− wµ(∇µvν))∇νf
Como el resultado de un corchete de este tipo es un campo vectorial eso nos lleva a pensar que el
nuevo campo tiene componentes ν del objeto entre parentesis en la ultima expresion:

8.4. DERIVADA COVARIANTE DE UN TENSOR 79
[v, w] f = (∇vw −∇wv)ν ∇νf
Ası que en terminos generales, el corchete entre dos campos vectoriales se puede escribir en terminos
de la derivada covariante:
[v, w] = ∇vw −∇wv
8.4. Derivada covariante de un tensor
Si queremos hacer la derivada covariante de un tensor lo unico que hay que tener en cuenta es que
hay que introducir una conexion por cada ındice que tenga el tensor. Ademas, para los ındices arriba
la conexion entra positiva y para los ındices abajo la conexion entra negativa. Llegados a este punto
solo se me ocurre desearos suerte en la distribucion de ındices que con el tiempo se vuelve una cosa
rutinaria. Valga el siguiente ejemplo:
∇σTµ1µ2ν1ν2 = ∂σT
µ1µ2ν1ν2 + Γµ1
σλTλµ2
ν1ν2 + Γµ2
σλTµ1λ
ν1ν2 − Γλσν1Tµ1µ2
λν2− Γλσν2T
µ1µ2
ν1λ
8.5. Conexiones
Hemos definido una derivada cuya actuacion sobre tensores nos devuelve un tensor. Eso es muy
bueno para poder hacer fısica. Y hemos visto que la forma de la derivada que consigue tal maravilla
es:
∇ = ∂ + Γ
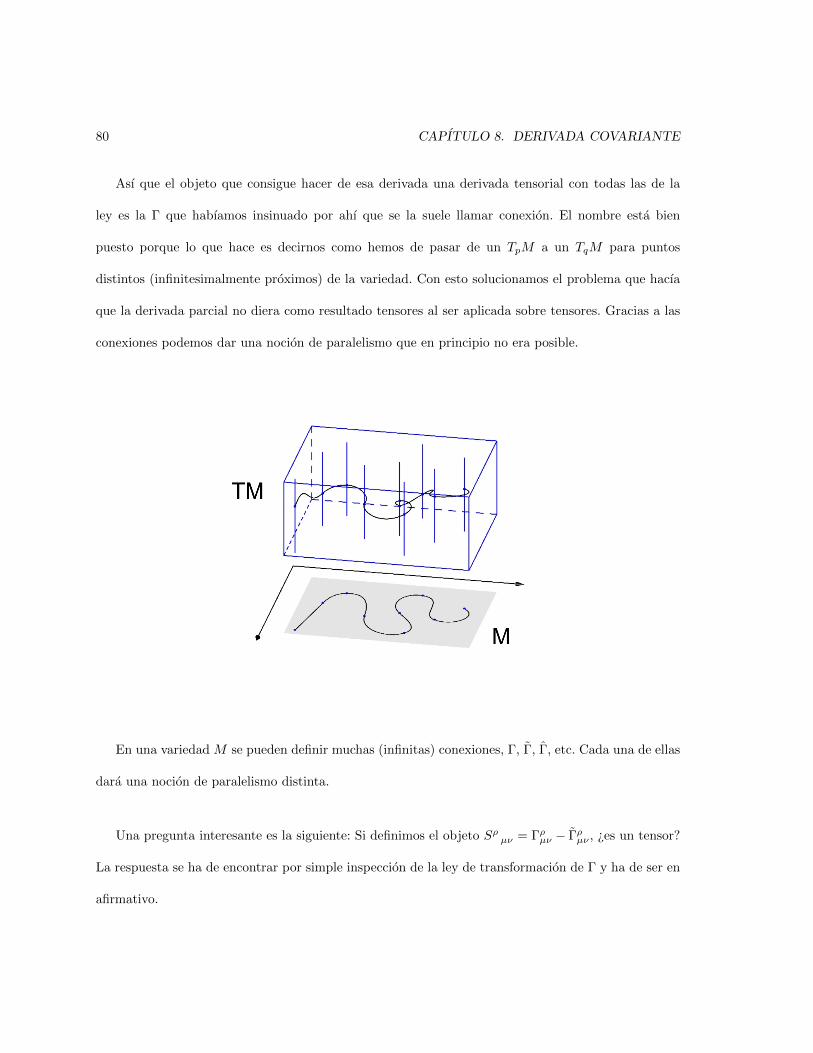
80 CAPITULO 8. DERIVADA COVARIANTE
Ası que el objeto que consigue hacer de esa derivada una derivada tensorial con todas las de la
ley es la Γ que habıamos insinuado por ahı que se la suele llamar conexion. El nombre esta bien
puesto porque lo que hace es decirnos como hemos de pasar de un TpM a un TqM para puntos
distintos (infinitesimalmente proximos) de la variedad. Con esto solucionamos el problema que hacıa
que la derivada parcial no diera como resultado tensores al ser aplicada sobre tensores. Gracias a las
conexiones podemos dar una nocion de paralelismo que en principio no era posible.
En una variedad M se pueden definir muchas (infinitas) conexiones, Γ, Γ, Γ, etc. Cada una de ellas
dara una nocion de paralelismo distinta.
Una pregunta interesante es la siguiente: Si definimos el objeto Sρ µν = Γρµν − Γρµν , ¿es un tensor?
La respuesta se ha de encontrar por simple inspeccion de la ley de transformacion de Γ y ha de ser en
afirmativo.

8.6. TORSION 81
8.6. Torsion
Al introducir el concepto de derivada covariante hemos exigido que sea libre de torsion, ¿que quiere
decir esto?
La respuesta la vamos a encontrar en el corchete de dos derivadas covariantes actuando sobre una
funcion:
[∇µ,∇ν ] f
Ha de ser inmediato encontrar que esa expresion da como resultado:
[∇µ,∇ν ] f = (Γρνµ − Γρµν)∇ρf
Vemos que el termino de la derecha involucra una diferencia de dos Γ’s. Esta diferencia entre dos
Γ’s se comporta como un tensor. Ası podremos escribir:
[∇µ,∇ν ] f = −T ρµν∇ρf,
donde T ρµν = Γρµν − Γρνµ que por su definicion es antisimetrico. Este tensor se denomina torsion.
Geometricamente este tensor nos dice si una referencia sufre rotaciones al ir trasladandola al seguir
una curva en la variedad. Dicho de otro modo, si los espacios tangentes en cada punto se giran unos
respecto de otros al seguir una curva en la variedad. La torsion es una de las caracterısticas invariantes
asociadas a las conexiones. La otra caracterıstica invariante indisolublemente ligada a una conexion
es, como veremos, la curvatura.

82 CAPITULO 8. DERIVADA COVARIANTE
8.7. La conexion metrica
Como hemos discutido no hay una unica conexion asociada a una variedad M . Sin embargo, si en
la variedad tenemos definida una metrica se puede encontrar una conexion unica que cumple estas
dos condiciones:
1. La conexion es simetrica: Γρµν = Γρ(µν). Es decir, la torsion es nula.
2. La conexion es compatible con la metrica: ∇ρgµν = 0.
Si se cumple la segunda condicion es trivial comprobar que tambien se cumple ∇ρgµν = 0. Basta
notar que si tenemos gµνgλν = δλµ y que δλµ es igual en todos los sistemas de referencia y constante.
Por lo tanto:
∇ρ(gµνgλν) = 0
Pero esto se puede escribir:
∇ρ(gµνgλν) = (∇ρgµν)gλν + gµν∇ρ(gλν) = 0
Dado que el primer termino de la derecha es cero por definicion, el segundo termino tambien ha
de anularse y, por lo tanto, ∇ρgµν = 0.
Gracias a estas dos propiedades podemos decir que la derivada covariante conmuta con la subida
y bajada de ındices a traves de la metrica.
Construccion de la conexion metrica
Para construir, es decir, para dar la forma concreta de la conexion metrica haremos uso de las dos
condiciones establecidas. Para ello vamos a calcular la derivada covariante∇ρgµν y luego lo repetiremos
para las permutaciones cıclicas de los tres ındices.
8.7. LA CONEXION METRICA 83
∇ρgµν = ∂ρgµν − Γλρµgλν − Γλρνgµλ = 0
∇µgνρ = ∂µgνρ − Γλµνgλρ − Γλµρgνλ = 0
∇νgρµ = ∂νgρµ − Γλνρgλµ − Γλνµgρλ = 0
Ahora, a la primera expresion le restamos las dos siguientes con lo que obtenemos (recordad que
exigimos simetrıa en los dos ındices inferiores de la Γ):
∂ρgµν − ∂µgνρ − ∂νgρµ + 2Γλµνgλρ = 0
De esta ultima expresion podemos aislar la Γ que resulta expresada unicamente en terminos de la
metrica y sus derivadas.
Γσµν =1
2gσρ(∂µgνρ + ∂νgρµ − ∂ρgµν)
Podeis comprobar, si os lo pide el cuerpo, que este bicho se transforma como una conexion. Animo
y mis mejores deseos.
A esta conexion se la denomina de diversas formas en la bibliografıa. Podreis encontrarla como
conexion de Levi-Civita, conexion de Christoffel o conexion de Riemann. A las expresiones coordenadas
de la Γ tambien se las denomina en muchas ocasiones sımbolos de Crhistoffel.
Un aspecto interesante que merece ser comentado es que si empleamos coordenadas normales estos
sımbolos de Christoffel se anulan. Os dejo que penseis el motivo.
84 CAPITULO 8. DERIVADA COVARIANTE
8.8. Transporte paralelo
Una conexion, o una derivada covariante ya que los terminos se consideran sinonimos, nos da una
receta para efectuar un transporte paralelo de un vector tangente a la variedad M siguiendo una curva
dada. Como ya comentamos distintas conexiones nos dan distintas nociones de paralelismo en terminos
abstractos. Por ahora vamos a asumir que hemos elegido una conexion generica, no necesariamente
metrica.
Supongamos que tenemos una curva en M , (en esta seccion seremos muy laxos en la notacion pero
conviene tener en la cabeza el juego de cartas y aplicaciones involucradas en la definicion de curva en
una variedad), cuya expresion coordenada es xµ(λ). El parametro λ es el que identifica los puntos de
la curva.
De la curva xµ(λ) podemos calcular su vector tangente en cada punto que representaremos por tµ:
tµ =dxµ
dλ
Si estuvieramos en un espacio vectorial euclıdeo el transporte paralelo de un tensor T de tipo (r, s)
serıa identificado por esta ecuacion:
dtµ
dλ=dxµ
dλ∂µT = 0
Es decir, que el tensor no cambia frente a cambios infinitesimales del parametro, simplemente se
traslada de un punto a otro de forma paralela. Eso no es mas que la derivada direccional del tensor
en la direccion del vector tangente a la curva en cuestion como se aprecia de la expresion que hemos
presentado. Desgraciadamente, en una variedad, las derivadas parciales no llevan tensores a tensores
y por lo tanto no nos sirve esa identificacion.

8.8. TRANSPORTE PARALELO 85
Sin embargo, hemos descrito una derivada que se comporta bien cuando actua sobre tensores, es
decir, lleva tensores a tensores y eso gracias a la introduccion de un objeto que nos permite comparar
espacios tangentes (y por tanto sus duales) en distintos puntos de la variedad. Ası que solo tenemos que
sustituir la derivada parcial por la derivada covariante. El transporte paralelo a traves de la derivada
covariante lo denotaremos por:
DT
dλ= tµ∇µT = 0
Concretemos un poco mas centrandonos en el transporte paralelo de un vector V µ. Segun lo dicho
el transporte paralelo serıa descrito por:
tµ∇µV ν =dxµ
dλ∂µV
ν +dxν
dλΓµνρV
ρ = 0
Esa expresion se puede reescribir como:
dV µ
dλ+ Γµνρ
dxν
dλV ρ = 0
Eso es una ecuacion diferencial de primer orden y sabemos que dada una condicion inicial tiene
una unica solucion.
Las cuatro formas de denotar el transporte paralelo de un vector son a lo largo de una curva con
tangente tµ son:
DV
dλ= 0
tµ∇µV ν = 0
∇tV = 0

86 CAPITULO 8. DERIVADA COVARIANTE
dV µ
dλ+ Γµνρ
dxν
dλV ρ = 0
Si nos empenamos en emplear una conexion metrica, porque en nuestra variedad tenemos la es-
tructura metrica definida, tendremos dos consecuencias inmediatas:
tλ∇λgµν = 0,
y eso es facilmente comprobable. Al fin y al cabo la conexion metrica es compatible con la metrica, la
hemos construido ası.
Y aun mas, el transporte paralelo preserva la norma de vectores o el angulo entre vectores al ser
transportados mediantes una conexion metrica:
tλ∇λ(gµνVµW ν) = 0,
os dejo esto como ejercicio de reafirmacion. Si tardamos mas de dos minutos en mostrar esto significara
que tenemos que volver a empezar a estudiar este tema urgentemente.
8.9. Geodesicas
En el espacio euclıdeo la geodesica es la lınea recta y esta tiene dos particularidades:
Es la curva que traslada su vector tangente paralelo a sı mismo.
Es la lınea que tiene la distancia mınima entre dos puntos que conecta.
Estas dos caracterısticas son independientes entre sı y de hecho, si carecemos de estructura metrica
disponible, en una variedad solo podemos definir las geodesicas como aquellas curvas que cumplen el
primer punto.
8.9. GEODESICAS 87
Una geodesica es la curva en la que su vector tantente se traslada paralelamente a sı
mismo.
Por lo tanto llamaremos geodesica a toda curva xµ, cuyo vector tangente es tµ, para la que se
cumple que tµ∇µtν = 0.
Si desarrollamos esta expresion acabamos con:
d2xµ
dλ2+ Γµρσ
dxρ
dλ
dxσ
dλ= 0
Una geodesica es la curva que extrema la distancia entre dos puntos que conecta.
Esto solo tiene sentido en una variedad con una metrica definida ya que solo con la metrica podemos
definir distancias (espaciales o espaciotemporales). La distancia entre dos puntos de una curva viene
dada por la siguiente integral:
τ =
∫ (−gµν
dxµ
dλ
dxµ
dλ
)
Hemos de realizar variaciones en esta integral para poder hallar el extremal. Por favor, acudid a
la bibliografıa para ver el calculo completo o intentadlo antes.
La condicion de extremalidad viene dada por:
d2xρ
dτ2+
1
2gρσ (∂µgνσ + ∂νgσµ − ∂σgµν)
dxµ
dτ
dxν
dτ= 0
En esta ocasion el parametro que elegimos para la curva es la propia distancia medida sobre la
misma. Ademas de eso, nos habran saltados todas las alarmas al ver la expresion que involucra a la
metrica y sus derivadas. Sı, son los sımbolos de Christoffel. De hecho, calcular las geodesicas en una
variedad con metrica es una de las formas de encontrar la conexion metrica.
88 CAPITULO 8. DERIVADA COVARIANTE
d2xρ
dτ2+ Γµρσ
dxµ
dτ
dxν
dτ= 0
Estas son n ecuaciones diferenciales ordinarias de segundo orden para determinar n funciones
xµ(τ). Por lo tanto, dada una condicion inicial para la posicion y su velocidad (derivada respecto al
parametro) tenemos una unica solucion. Es decir, dado un p ∈M y cualquier vector tangente V a la
variedad en dicho punto existe una unica geodesica que pasa por el punto p y tiene por tangente a V .
Hay un detalle que comentar sobre los parametros de las curvas geodesicas. Si λ es el parametro
de una curva lo podemos cambiar por otro parametro τ . Pero si cambiamos el parametro estamos
cambiando la curva ya que estamos cambiando la aplicacion que nos lleva de R a M aunque se
seleccionen los mismos puntos sobre M . Esa es una maldad que hay que tener clara. Resulta que las
ecuaciones geodesicas que hemos derivado solo conservan su forma para cambios de parametros de la
forma:
τ = aλ+ b,
donde a y b son constantes que no dependen del punto de la variedad. Estos tipos de parametros
se denominan parametros afines y las geodesicas siempre han de estar expresadas en este tipo de
parametros. Ası que una curva que seleccione los mismos puntos que una geodesica en la variedad M
pero cuyo parametro no sea afın no se denomina geodesica.
Capıtulo 9
Curvatura - El tensor de Riemann
En este capıtulo vamos a encontrarnos con el objeto que da cuenta de la curvatura de una variedad
M en cada punto. Este objeto es el famoso tensor de Riemann.
Hay varias formas de definir el tensor de Riemann. Para mı la mejor forma es ver que necesitamos
de un tensor que tenga en cuenta la curvatura de una variedad. Posteriormente se puede dar una
definicion mas operativa, mas algebraica.
9.1. Curvatura y curvas cerradas
En esta seccion vamos, de una forma ligera y poco formal, a ver la necesidad de tener un tensor
que de cuenta de la curvatura de una variedad. Para tal cosa hemos de tener en mente que cuando
hacemos el transporte paralelo de un vector a lo largo de una curva cerrada. Resulta que cuando
el vector vuelve al punto de partida no coincide con el original, ha sufrido una transformacion. Esa
transformacion es debida a la curvatura encerrada por el camino cerrado que hemos seguido en el
89

90 CAPITULO 9. CURVATURA - EL TENSOR DE RIEMANN
proceso. Este camino o curva cerrada se puede contraer hasta un punto en un proceso de lımite y por
lo tanto hemos de ser capaces de hablar de la curvatura de la variedad punto a punto.
Vamos a dar una serie de pasos que nos llevaran a concluir que la curvatura en una variedad M
tiene que venir dada por un tensor.
1. Definimos un camino cerrado infinitesimal del siguiente modo:
En el camino definimos los puntos a, b, c y d tal y como se indica en la figura.
2. Este camino cerrado estara contenido en una subvariedad S ⊂M de dos dimensiones.
3. En el abierto de S que contiene al camino cerrado disponemos de un sistema de coordenadas
(t, s). Es decir, a cada punto p ∈ S, o en uno de sus abiertos que contienen al camino cerrado,
le asociamos (t, s) en R2.
4. Dadas esas coordenadas tenemos una base natural asociada. Supongamos que esa base la repre-
sentamos por Aµ y Bµ. Como es una base coordenada del tangente a un punto de S se cumplira
[Aν , Bµ] = 0. Expresado de otro modo:
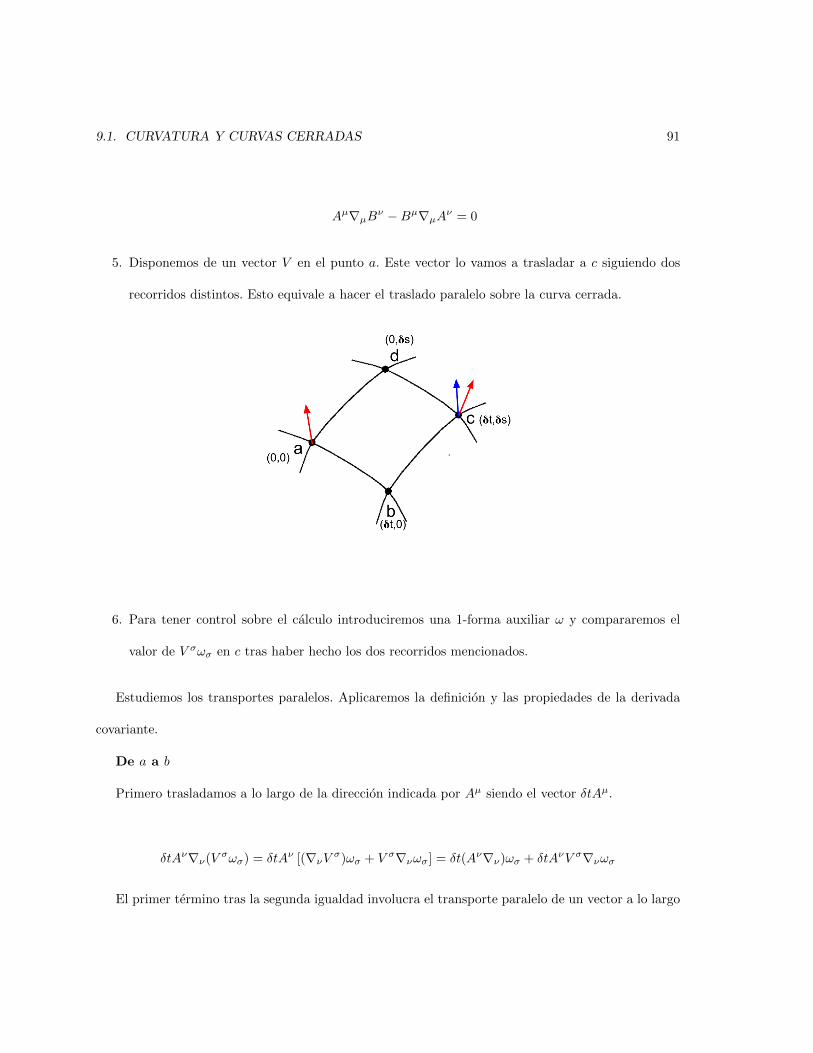
9.1. CURVATURA Y CURVAS CERRADAS 91
Aµ∇µBν −Bµ∇µAν = 0
5. Disponemos de un vector V en el punto a. Este vector lo vamos a trasladar a c siguiendo dos
recorridos distintos. Esto equivale a hacer el traslado paralelo sobre la curva cerrada.
6. Para tener control sobre el calculo introduciremos una 1-forma auxiliar ω y compararemos el
valor de V σωσ en c tras haber hecho los dos recorridos mencionados.
Estudiemos los transportes paralelos. Aplicaremos la definicion y las propiedades de la derivada
covariante.
De a a b
Primero trasladamos a lo largo de la direccion indicada por Aµ siendo el vector δtAµ.
δtAν∇ν(V σωσ) = δtAν [(∇νV σ)ωσ + V σ∇νωσ] = δt(Aν∇ν)ωσ + δtAνV σ∇νωσ
El primer termino tras la segunda igualdad involucra el transporte paralelo de un vector a lo largo

92 CAPITULO 9. CURVATURA - EL TENSOR DE RIEMANN
de una curva por lo que se anula. Entonces nos queda que el resultado de transportar paralelamente
hasta b se puede escribir como:
δtAνV σ∇νωσ
De b a c
Ahora trasladamos a lo largo de la direccion de Bµ que nos quedara:
δtδsBµ∇µ(AνV σ∇νωσ) = δtδsBµ(∇µAν)V σ∇νωσ
+δtδsBµAν(∇µV σ)∇νωσ
+δtδsBµAνV σ∇µ∇νωσ
Los dos primeros terminos de la derecha involucran un traslado paralelo de un vector ası que
cancelan. Por lo que en c tenemos:
δtδsBµAνV σ∇µ∇νωσ
A esta expresion la llamaremos (1).
Para hacer el otro recorrido podemos aprovechar estos resultados y hacer los cambios ∇ν ↔ νµ,
Aν ↔ Bµ y δt↔ δs. Y con eso obtenemos los siguientes resultados:
De a a d
δsBµV σ∇µωσ
De d a c
9.2. EL TENSOR DE RIEMANN 93
δtδsAνBµV σ∇ν∇µωσ
A esta expresion la llamaremos (2).
Llegados a este punto podemos calcular la variacion producida en el valor de V σωσ tomando la
diferencia (1)− (2). Es directo encontrar que la expresion final tiene la forma:
δtδsAνBµV σ [∇µ,∇ν ]ωσ
Lo que vemos es que el resultado depende del corchete entre dos derivadas covariantes en dos
direcciones. Ese corchete ha de ser un tensor ya que es una diferencia de derivadas covariantes mixtas.
Ese tensor ha de tener informacion sobre la curvatura de la variedad debido a que controla el cambio
que produce un traslado paralelo de un vector a lo largo de un circuito cerrado.
9.2. El tensor de Riemann
Como hemos visto en la seccion anterior la curvatura de una variedad tiene que estar codificada
en un tensor. Para determinar la naturaleza del mismo vamos a hacer unos calculos simples.
Primero tomamos fωσ siendo f una funcion suave y ωσ una 1-forma. Por lo tanto, fωσ es una
1-forma, es decir, un tensor de tipo (0, 1).
Si ahora aplicamos [∇µ,∇ν ] sobre fωσ:
[∇µ,∇ν ] (fωσ) = f (∇µ∇ν −∇ν∇µ)ωσ︸ ︷︷ ︸tensor (0,3)
Dado que [∇µ,∇ν ] ha de ser un tensor tiene que ser del tipo (1, 3) para que al actuar sobre un
tensor de tipo (0, 1) quede el resultado que hemos visto, un tensor de tipo (0, 3).

94 CAPITULO 9. CURVATURA - EL TENSOR DE RIEMANN
Por tanto, el conmutador de dos derivadas covariantes actuando sobre una 1-forma ha de poderse
expresar del siguiente modo:
[∇µ,∇ν ]ωσ = Rρσµνωρ
Y ya podemos extraer una propiedad de este tensor, es antisimetrico en pareja de los dos ultimos
ındices. La razon proviene de su definicion a partir de un corchete.
Rρσµν = −Rρσνµ
Este tensor Rρσµν es el tensor de Riemann.
Hemos de ser conscientes de que en ningun momento del calculo hemos requerido que la variedad
tenga definida una metrica. Es decir, el tensor de Riemann no esta asociado a una metrica de forma
indisoluble. Lo que sı es cierto es que el tensor de Riemann tiene en cuenta la conexion y sus derivadas.
Es decir, dada una conexion podremos hablar de curvatura de la variedad en la que la hayamos definido
y dicha curvatura, punto a punto, vendra definida por el tensor de Riemann.
Para ver la relacion entre el tensor de Riemann y la conexion lo mejor es calcular el efecto de
aplicar el conmutador de dos derivadas covariantes sobre un vector.
Partimos de:
[∇µ,∇µ]V ρ = ∇µ∇νV ρ −∇ν∇µV ρ
Empleando la expresion explıcita de la derivada covariante en terminos de la conexion y desarro-
llando el termino de la derecha hemos de ser capaces de llegar a la siguiente expresion:
[∇µ,∇µ]V ρ =(∂µΓρνσ − ∂νΓρµσ + ΓρµλΓλνσ
)V σ − 2Γλ[µν]∇λV
ρ

9.2. EL TENSOR DE RIEMANN 95
Como hemos visto antes [∇µ,∇µ] ∼ Rρσµν . Ası que el tensor de Riemann tiene que estar en la
expresion anterior, lo que vemos es que el segundo termino del miembro de la derecha tiene un factor
Γλ[µν] y eso no es mas que la torsion que habıamos definido anteriormente. Por lo que:
[∇µ,∇µ]V ρ =(∂µΓρνσ − ∂νΓρµσ + ΓρµλΓλνσ
)︸ ︷︷ ︸
Tensor de Riemann
V σ − 2 Γλ[µν]︸︷︷︸ΓTorsion
∇λV ρ
Evidentemente este calculo es valido para cualquier conexion. Si exigimos que sea de torsion nula
el conmutador simplemente nos devuelve el tensor de Riemann.
Rρσµν = ∂µΓρνσ − ∂νΓρµσ + ΓρµλΓλνσ
Tensor de Riemann en una variedad con una metrica definida
Si en una variedad M tenemos definida una metrica g podemos seleccionar una conexion, de entre
todas las posibles, que cumple que es consistente con la metrica ∇g = 0 y que tiene torsion nula
T = 0.
Dado que el tensor de Riemann ha de dar cuenta de la curvatura de la variedad podemos pregun-
tarnos: ¿Como podemos identificar una variedad plana?
Diremos que una variedad M con metrica g es plana si podemos encontrar un sistema de coorde-
nadas para toda la variedad tal que ∂σgµν = 0 . Si se cumple eso inmediatamente sabemos que tanto
Γ como cualquiera de sus parciales ∂Γ se anulan, ya que la conexion metrica depende de la metrica y
sus derivadas parciales primeras. Por lo tanto, en ese caso:
Rρσµν = 0,
todas las componentes del tensor de Riemann se anulan. Y como es una expresion tensorial eso se
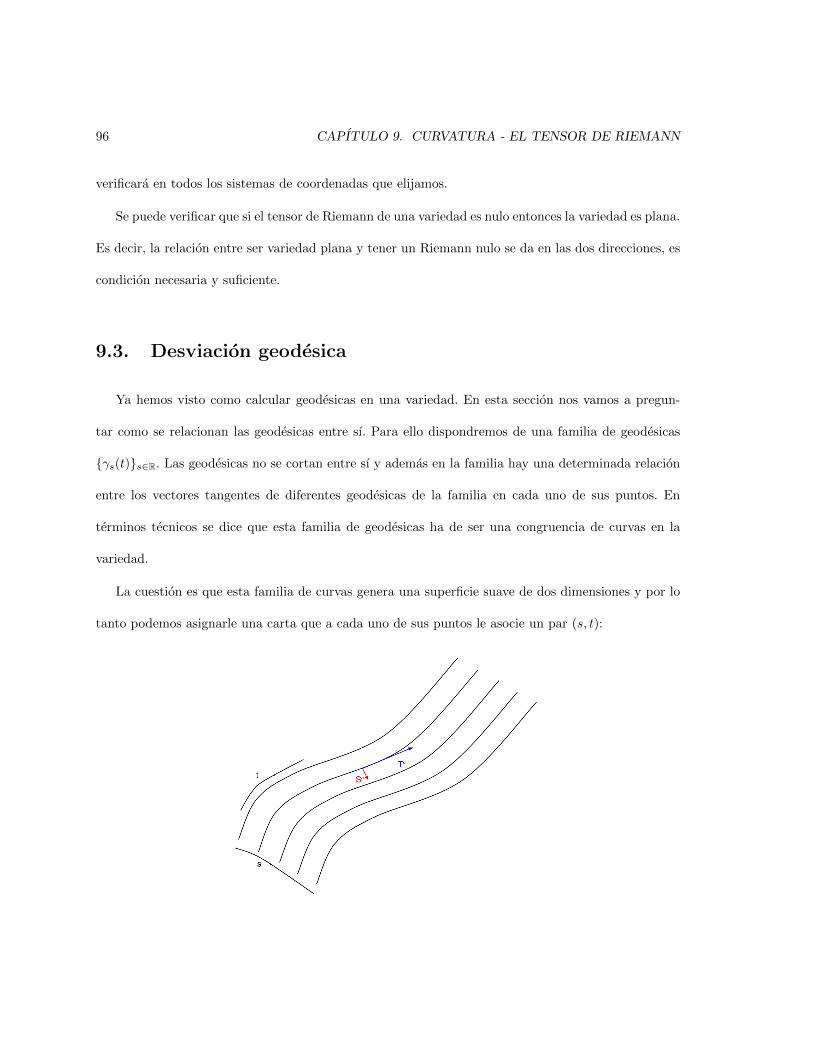
96 CAPITULO 9. CURVATURA - EL TENSOR DE RIEMANN
verificara en todos los sistemas de coordenadas que elijamos.
Se puede verificar que si el tensor de Riemann de una variedad es nulo entonces la variedad es plana.
Es decir, la relacion entre ser variedad plana y tener un Riemann nulo se da en las dos direcciones, es
condicion necesaria y suficiente.
9.3. Desviacion geodesica
Ya hemos visto como calcular geodesicas en una variedad. En esta seccion nos vamos a pregun-
tar como se relacionan las geodesicas entre sı. Para ello dispondremos de una familia de geodesicas
{γs(t)}s∈R. Las geodesicas no se cortan entre sı y ademas en la familia hay una determinada relacion
entre los vectores tangentes de diferentes geodesicas de la familia en cada uno de sus puntos. En
terminos tecnicos se dice que esta familia de geodesicas ha de ser una congruencia de curvas en la
variedad.
La cuestion es que esta familia de curvas genera una superficie suave de dos dimensiones y por lo
tanto podemos asignarle una carta que a cada uno de sus puntos le asocie un par (s, t):

9.3. DESVIACION GEODESICA 97
En esta familia de geodesicas podemos definir un vector tangente a cada curva:
Tµ =dxµ
dt
Tambien podremos encontrar un vector que apunta de una geodesica a otra y que denominaremos
vector de desviacion:
Sµ =dxµ
ds
Estos dos vectores en realidad conforman la base natural definida por las coordenadas (s, t) y por
lo tanto su corchete [S, T ] es nulo.
Podemos calcular la velocidad relativa entre las geodesicas. En este contexto entendemos por
velocidad relativa al cambio introducido por el traslado paralelo del vector Sµ en la direccion del
vector tangente a la curva considerada, Tµ. Ası que llamaremos a la velocidad relativa entre geodesicas
a lo siguiente:
V µ = T ρ∇ρSµ = (∇TS)µ
La aceleracion entre las geodesicas, es decir, la rapidez con la que se acercan entre sı se define por
lo tanto como:
aµ = T ρ∇ρV µ = (∇TV )µ
Desarrollemos esta expresion:
aµ =D2xµ
dt2= T ρ∇ρV µ = T ρ∇ρ (Tσ∇σSµ)
98 CAPITULO 9. CURVATURA - EL TENSOR DE RIEMANN
Es interesante que desarrolleis esta expresion, para ello las pistas son:
[S, T ] = 0
Las curvas son geodesicas, ası que ya sabemos lo que pasa con el transporte paralelo del vector
tangente en la direccion del vector tangente.
[∇,∇] = R, entendiendo que las derivadas covariantes se toman en diferentes direcciones.
Con esa ayuda tendreis que llegar a:
aρ =D2xρ
dt2= RρσµµT
σTµSν ,
he retocado los ındices de esta expresion final, seguro que tu no has encontrado los mismos,
cambialos o dejalos como quieras siempre que todo este bien contraıdo.
Este resultado quiere decir que si dejamos dos partıculas siguiendo dos geodesicas aparecera una
aceleracion relativa entre ambas que esta controlada por el tensor de Riemann, es decir, por la curva-
tura.
9.4. Las simetrıas del tensor de Riemann
Es importante conocer las multiples simetrıas que tiene el tensor de Riemann en sus ındices. Ya
hemos visto que es antisimetrico en el segundo par de ındices:
Rρσµν = −Rρσνµ
Para estudiar las otras simetrıas es conveniente tener todos los ındices del tensor a la misma altura.
Empleemos la metrica para tal fin:

9.4. LAS SIMETRIAS DEL TENSOR DE RIEMANN 99
Rρσµν = gρλRλσµν
Debido a que la expresion del Riemann en terminos de los sımbolos de Christoffel es muy antipatica
vamos a simplificarnos la vida trabajando en coordenadas normales y centrandonos en el punto donde
g = η, ∂g = 0 y Γ = 0.
En ese punto y en coordenadas normales la expresion del Riemann pasa de ser:
Rρσµν = ∂µΓρνσ − ∂νΓρµσ + ΓρµλΓλνσ,
a ser:
Rρσµν = ∂µΓρνσ − ∂νΓρµσ
La derivada de Γ no se anula porque eso implica segundas derivada en la metrica que en coordenadas
normales no se pueden hacer todas cero.
Ası podemos dar la expresion del tensor de Riemann con todos los ındices abajo en terminos
exclusivos de la segunda derivada parcial de la metrica:
Rρσµν = gρλ(∂µΓλνσ − ∂νΓλµσ
)=
1
2(∂µ∂σgρν − ∂µ∂ρgνσ − ∂ν∂σgρµ + ∂ν∂ρgσµ)
La metrica es simetrica y las segundas derivadas parciales cruzadas tambien. Con eso es facil
demostrar las siguientes simetrıas del tensor de Riemann:
1. Es antisimetrico en el primer par de ındices Rρσµν = −Rσρµν
2. Es simetrico si intercambiamos en bloque el primer par de ındices por el segundo: Rρσµν = Rµνρσ
100 CAPITULO 9. CURVATURA - EL TENSOR DE RIEMANN
3. La suma del tensor de Riemann con las permutaciones cıclicas de los tres ultimos ındices se
anula:
Rρσµν +Rρµνσ +Rρνσµ = 0
A esta relacion se la conoce como la primera identidad de Bianchi.
9.5. La identidad de Bianchi
Vamos a estudiar ahora la identidad de Bianchi que en realidad es la segunda identidad de Bianchi.
Se nombra simplemente como identidad de Bianchi porque es fundamental en lo que sigue.
Para llegar a esta identidad hemos de trabajar con la derivada covariante del tensor de Riemann
con todos los ındices abajo. Ası se puede demostrar que:
∇λRρσµν +∇ρRσλµν +∇σRλρµν = 0
El truco para simplificarnos el calculo vuelve a ser trabajar en coordenadas normales en el punto
donde la metrica y la conexion se anulan. Claro que como siempre podemos poner ese sistema de
coordenadas centrado en cualquier punto de la variedad y como esa expresion es claramente tensorial
ha de ser valida en cualquier sistema de coordenadas.
9.6. Las contracciones del tensor de Riemann
Dado el tensor de Riemann Rρσµν podemos hacer una contraccion del mismo. En este caso, debido
a las simetrıas del tensor solo hay una contraccion no nula, la que involucra el ındice de arriba con el
segundo ındice de abajo.
9.7. LA IDENTIDAD DE BIANCHI CONTRAIDA 101
Rρσρν = Rσν
Este tensorRµν se denomina tensor de Ricci y es facilmente comprobable que es un tensor simetrico.
Su significado es interesante, en lıneas generales nos da el volumen de un sistema de partıculas que
forman una superficie esferica al seguir cada una de ellas una geodesica. Este volumen en una variedad
con curvatura es diferente al que tendrıa el mismo sistema en un espacio euclıdeo.
Si estamos trabajando en una variedad metrica podemos hacer una nueva contraccion sin mas que
subir un ındice del tensor de Ricci con la metrica:
Rµν = gµσRσν
Siendo la contraccion:
R = Rµµ,
es decir, la traza del tensor de Ricci. Hemos obtenido el escalar de Ricci o el escalar de curvatura.
9.7. La identidad de Bianchi contraida
Vamos a contraer la identidad de Bianchi para expresarlas en terminos del tensor de Ricci. Recor-
demos que si estamos en una variedad con una metrica la derivada covariante conmuta con la subida
y bajada de ındices (porque ∇g = 0).
gνσgµλ (∇λRρσµν +∇ρRσλµν +∇σRλρµν) = 0
Las metricas pasan a traves de las derivadas covariantes como si nada y obtenemos:

102 CAPITULO 9. CURVATURA - EL TENSOR DE RIEMANN
∇µRρµ −∇ρR+∇µRρµ = 0,
sı hemos cambido algun ındice mudo por ahı. Y ∇µ = gµν∇ν .
Esa identidad se puede escribir como:
2∇νRµν −∇µR = 0
Y yendo un paso mas alla:
∇µ(Rµν −
1
2gµνR
)= 0,
otra vez hemos renombrado ındices, esto es ası.
Aquı hemos encontrado una relacion entre el Ricci y el escalar de curvatura que tiene derivada
covariante nula. Ese tensor recibe un nombre propio, el tensor de Einstein:
Gµν = Rµν −1
2gµνR
El tensor de Einstein es simetrico y cumple:
∇µGµν = 0
Y tambien:
gµν∇νGµν = 0⇒ ∇µGµν = 0,
donde hemos renombrado ındices y usado la simetrıa.
Ha llegado el momento de hablar de fısica.

Parte Fısica
Gravedad
Capıtulo 10
Tensor Energıa-Momento
Al estudiar los sistemas de partıculas o los campos desde un punto de vista variacional a traves
de una accion encontramos un objeto fundamental, el tensor energıa-momento. Este tensor condensa
la informacion de la distribucion de la densidad de energıa ası como la de sus flujos, los momentos.
Cualquier afirmacion sobre conservacion de energıa o momentos se hace sobre la base del tensor de
energıa-momento, Tµν .
El tensor energıa-momento es un tensor de dos ındices y es simetrico: Tµν . En la formulacion canoni-
ca solemos obtener tensores energıa-momento que no son simetricos pero nos las sabemos apanar para
arreglar ese pequeno inconveniente. Si estamos en un espacio de cuatro dimensiones e identificamos
la componente temporal por x0 y las espaciales por xi, el significado de las componentes del tensor
energıa-momento es como sigue:
T 00 es la densidad de energıa en el punto que hagamos el calculo de esa componente del tensor.
T 0i es el flujo de energıa por unidad de tiempo a traves de un area unidad en la direccion i. Por
105
106 CAPITULO 10. TENSOR ENERGIA-MOMENTO
contra, cuando tenemos T i0 acostumbramos a decir que es la densidad de momento. A causa de
la simetrıa del tensor una u otra interpretacion son igual de validas.
T ij es el flujo de la componente i del momento por unidad de tiempo y area en la direccion
j. A causa de la simetrıa del tensor energıa-momento podrıamos describirlo como el flujo de la
componente j del momento por unidad de tiempo y area en la direccion i.
A las componentes diagonales espaciales, T ii se las suele llamar presiones.
Esta, sin lugar a dudas, es una version muy simplificada de la interpretacion del tensor energıa-
momento pero que sera valida para nuestros propositos.
El tensor energıa-momento esta sujeto a una ley de conservacion, que en un espacio plano toma la
forma:
∂µTµν = 0
Esto tiene el aspecto de una ecuacion de continuidad. Si desarrollamos la suma en el ındice µ
dejando ν = 0 tendrıamos algo ası:
∂0T00 + ∂iT
0i = 0,
en el segundo termino de la suma hemos cambiado los ındices del tensor energıa-momento aprove-
chando su simetrıa para poder interpretarlos mejor. De esa forma la ecuacion recuerda a la ecuacion
de continuidad electromagnetica o en un fluido, tenemos la relacion entre la derivada temporal de la
densidad de energıa y la divergencia del flujo de la misma en las distintas direcciones.
Por otro lado, si hacemos la suma en µ tomando ν = i obtendrıamos:
107
∂0T0i + ∂jT
ji = 0
Aquı tenemos una derivada del momento en la direccion i lo que nos da una componente de una
fuerza y esta esta relacionada con la divergencia de una fuerza en la direccion i a traves de una
superficie unidad en la direccion j.
Es importante recalcar el hecho de que si estamos en relatividad especial la fısica se desarrolla en
un espacio de Minkowski M4 con una metrica dada por la metrica de Minkowski ηµν y que cualquier
campo fısico satisface que su tensor de energıa-momento verifica una ley de conservacion ∂µTµν = 0.
Eso es lo que tenemos que tener en la cabeza.
Como nosotros queremos ir a trabajar a variedades que no han de ser planas en principio hemos de
tener cuidado en que no perdamos de vista la conservacion de la energıa y el momento en el proceso.
Para empezar lo primero que tendrıamos que hacer en una variedad generica con una metrica definida
en ella es transformar la derivada parcial en derivada covariante para que estemos seguros de que el
resultado de la derivacion sigue siendo un tensor. Ası en un punto de una variedad al tener en cuenta
todas las contribuciones a la energıa de todos los campos y partıculas presentes definirıamos el Tµν(x)
simetrico. Que en cada punto debe de verificar ∇µTµν .

108 CAPITULO 10. TENSOR ENERGIA-MOMENTO
Capıtulo 11
La gravedad de Newton
La gravedad newtoniana fue considerada como la joya de la corona de la fısica durante mucho
tiempo. No hay discusion de que ha sido, y es, una teorıa muy potente que ha proporcionado muchas
predicciones teoricas a multiples fenomenos gravitatorios. Ademas, se puede decir que la teorıa de
Newton de la gravedad nos enseno a hacer fısica, por primera vez se describıa una interaccion natural
en terminos matematicos.
La gravedad newtoniana se puede resumir en una ecuacion, simplificando mucho, la ecuacion de
Poisson:
∇2Φ(r) = 4πGρ(r)
Esta ecuacion nos dice la relacion entre el potencial gravitatorio Φ y la densidad de materia ρ en
una determinada region. Esa ecuacion es la guardiana de los tesoros gravitatorios newtonianos.
Su solucion viene dada por la funcion de Green:
109
110 CAPITULO 11. LA GRAVEDAD DE NEWTON
Φ(t, ~x) = −G∫d3~y
ρ(t, ~y)
|~x− ~y|
Conocer y manejarse con esas expresiones es una de las tareas mınimas exigidas a cualquiera que
se ponga a estudiar fısica de verdad.
11.1. Gravedad Newtoniana y Relatividad Especial
La relatividad especial se fundamenta en que hay unos observadores, los inerciales, para los que
las leyes de la fısica son invariantes y que determinan una velocidad tambien invariante para todos
ellos. Esa velocidad invariante es la velocidad e la luz en el vacıo, pero podrıa haber sido cualquier
otra, lo importante es que existe una velocidad que no varıa al cambiar de sistema inercial.
Como consecuencia de las bases de la relatividad especial se extrae que ningun sistema con energıa
en reposo no nula puede moverse a la velocidad de la luz en el vacıo. Por lo tanto, toda interaccion
fısica se ha de propagar a lo sumo a dicha velocidad de la luz.
Aquı empieza la tension con la gravedad newtoniana. Por un lado, si observamos la ecuacion de
Poisson:
∇2Φ(t, r) = 4πGρ(t, r)
Vemos que tenemos el Laplaciano actuando sobre el potencial, pero el Laplaciano es simplemente
δij∂i∂j . Es decir, solo involucra derivadas parciales espaciales. Como sabemos dos observadores iner-
ciales en relatividad especial pasan de las coordenadas de uno a otro a traves de transformaciones
de Lorentz. Estas transformaciones combinan coordenadas espaciales con la temporal. Por lo tanto,
si un observador inercial determina la ecuacion de Poisson para el potencial gravitatorio, al cambiar
11.2. EL PRINCIPIO DE EQUIVALENCIA DE NEWTON 111
de observador inercial se produciran mezclas entre las componentes espaciales y temporales de las
coordenadas. Eso, como mınimo, alterara la forma de la ecuacion de Poisson y por lo tanto no sera
cierto que las leyes de la fısica sean las mismas, tengan la misma forma, para todos los observadores
inerciales. Ya tenemos un grave conflicto entre gravedad de Newton y relatividad de Einstein.
Podemos ver otra razon mas de este conflicto. Miremos la solucion a la ecuacion de Poisson:
Φ(t, ~x) = −G∫d3~y
ρ(t, ~y)
|~x− ~y|
El problema es que si cambiamos la distribucion de masa en el punto ~y el potencial cambiara
instantaneamente en todo el espacio. La transmision de la interaccion se hace a velocidad infinita.
El punto clave es ver que en la integral solo se integra en todos los puntos de la region que estemos
estudiando y se hace de una vez, no hay nocion de tiempo involucrado en esa operacion. Esta es la
explicacion mas formal del famoso ejemplo de hacer desaparecer el Sol. Segun Newton la Tierra saldrıa
disparada instantaneamente, para Einstein solo se enterarıa ocho minutos despues que es lo que tarda
la luz en conectar el Sol con la Tierra.
11.2. El principio de equivalencia de Newton
El principio de equivalencia de Newton o debil establece dos cosas relacionada entre sı:
Dos cuerpos en el seno de un campo gravitatorio y en ausencia de rozamiento caen con la misma
aceleracion independientemente de su masa y su composicion.
La masa inercial, la definida a traves de la segunda ley de Newton, y la masa gravitatoria de un
cuerpo son iguales.
112 CAPITULO 11. LA GRAVEDAD DE NEWTON
mi = mg,
bastarıa con que fueran proporcionales pero entonces podrıamos redefinirlas para que fueran
iguales. Tanto da.
Capıtulo 12
El principio de equivalencia en
manos de Einstein
Einstein propuso la relatividad especial en 1905 y ya en 1907 se planteo encontrar una teorıa
gravitatoria consistente con esta teorıa con la que paliar la tension entre la gravedad de Newton y su
relatividad especial. No fue hasta el 25 de noviembre de 1915 que propuso la version definitiva de lo
que conocemos como relatividad especial. Por el camino fue ayudado por muchos companeros entre
los que hay que destacar a Marcel Grossmann y a Michele Besso. El uno por identificar la matematica
que estaba buscando Einstein para su teorıa, el otro por plantear difıciles cuestiones conceptuales
sobre la fısica que ayudaron a dar forma definitiva a la relatividad general. Hay que comentar que
la creacion de la relatividad general no fue un camino de rosas, muchos intentos en vano, muchas
ideas equivocadas. Por mencionar algo, en los manuscritos de Einstein estaban las ecuaciones de la
relatividad general en 1912 que desestimo por no considerarlas correctas.
113
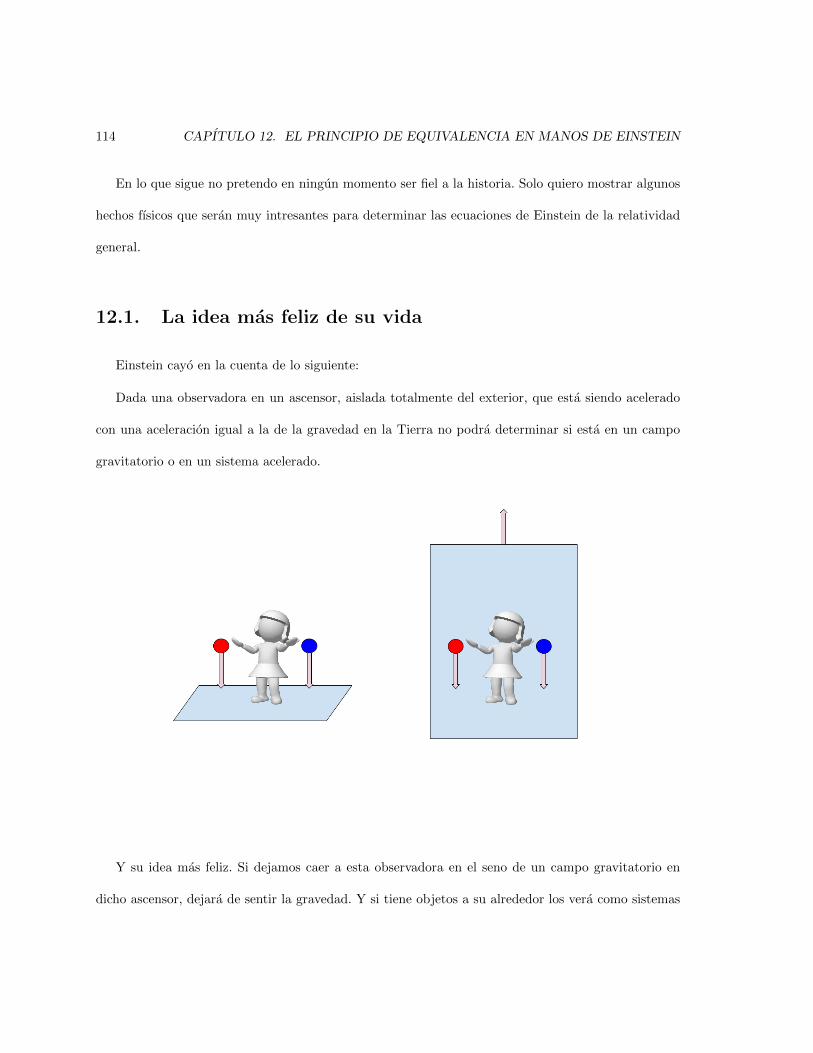
114 CAPITULO 12. EL PRINCIPIO DE EQUIVALENCIA EN MANOS DE EINSTEIN
En lo que sigue no pretendo en ningun momento ser fiel a la historia. Solo quiero mostrar algunos
hechos fısicos que seran muy intresantes para determinar las ecuaciones de Einstein de la relatividad
general.
12.1. La idea mas feliz de su vida
Einstein cayo en la cuenta de lo siguiente:
Dada una observadora en un ascensor, aislada totalmente del exterior, que esta siendo acelerado
con una aceleracion igual a la de la gravedad en la Tierra no podra determinar si esta en un campo
gravitatorio o en un sistema acelerado.
Y su idea mas feliz. Si dejamos caer a esta observadora en el seno de un campo gravitatorio en
dicho ascensor, dejara de sentir la gravedad. Y si tiene objetos a su alrededor los vera como sistemas
12.1. LA IDEA MAS FELIZ DE SU VIDA 115
inerciales siendo ella misma uno de tales sistemas.
Esto lo podemos formular del siguiente modo:
1. No hay ningun experimento fısico que, puntualmente, nos ayude a discriminar entre un campo
gravitatorio y un sistema acelerado.
2. No hay ningun experimento fısico que, puntualmente, distinga a un observador inercial de un
observador en caıda libre en un campo gravitatorio.
Einstein llevo esto al extremo diciendo que la fısica deberıa de ser la misma para todos los obser-
vadores.
Por supuesto, una observadora estacionaria en un campo gravitatorio determinara que tanto el
ascensor como todo lo que contiene estan sufriendo la interaccion de la gravedad. Sin embargo, la
observadora en caıda libre dira que es una observadora inercial que no siente interaccion alguna.
116 CAPITULO 12. EL PRINCIPIO DE EQUIVALENCIA EN MANOS DE EINSTEIN
Esto es una novedad, hay una interaccion, la gravedad, que desaparece para algunos observadores,
los que estan en caıda libre.
De hecho, si le preguntamos a la observadora en caıda libre nos dira que a su alrededor la fısica
se comporta como si estuviera en un espacio de Minkowski. Se verifican las leyes de la relatividad
especial. A esto se le conoce como principio de equivalencia de Einstein o fuerte.
Hay un detalle que no puede pasar por alto. En la descripcion de los dos puntos anteriores aparece
la palabra -puntualmente-. Eso es debido a lo siguiente, ¿que pasa si el ascensor es muy grande y esta
en caıda libre hacia la Tierra? ¿Como vera la observadora moverse a los objetos que tiene alrededor?
Pensemos un poco, si el ascensor se esta cayendo hacia la Tierra, todos los objetos del interior
sentiran una fuerza que los intenta llevar hacia el centro de la Tierra, el centro del campo gravitatorio.
Por lo tanto, la observadora vera como los objetos que estan a su alrededor aceleran unos respecto a
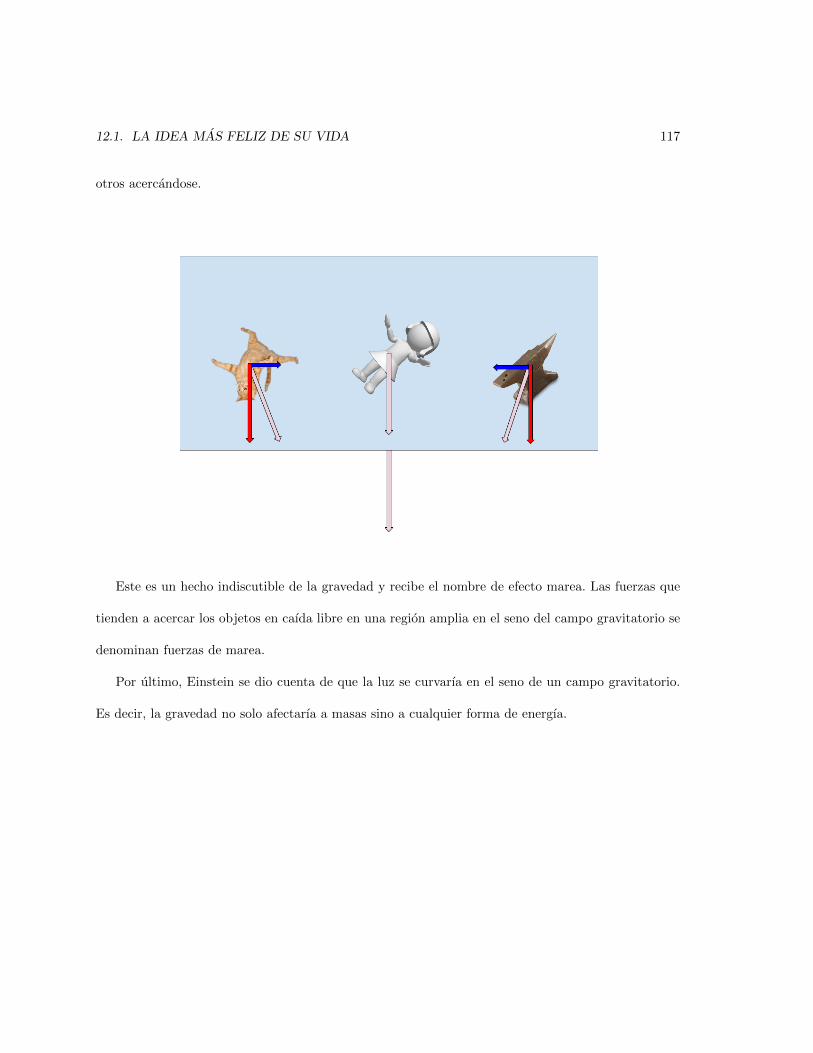
12.1. LA IDEA MAS FELIZ DE SU VIDA 117
otros acercandose.
Este es un hecho indiscutible de la gravedad y recibe el nombre de efecto marea. Las fuerzas que
tienden a acercar los objetos en caıda libre en una region amplia en el seno del campo gravitatorio se
denominan fuerzas de marea.
Por ultimo, Einstein se dio cuenta de que la luz se curvarıa en el seno de un campo gravitatorio.
Es decir, la gravedad no solo afectarıa a masas sino a cualquier forma de energıa.
118 CAPITULO 12. EL PRINCIPIO DE EQUIVALENCIA EN MANOS DE EINSTEIN
Capıtulo 13
Fısica y Matematicas: Las
ecuaciones de Einstein
Ha llegado el momento de que intentemos unir lo que hemos aprendido de la parte matematica con
lo que llevamos discutido en la parte fısica. Vereis que la transicion es tan natural que parece mentira.
13.1. La hora de la verdad
Empecemos con la tarea:
119
120 CAPITULO 13. FISICA Y MATEMATICAS: LAS ECUACIONES DE EINSTEIN
Fısica Matematicas
La fısica ha de ser la misma para todos los
observadores.
La fısica se ha de formular con tensores.
En este punto encontramos sentido a todo el trabajo hecho para entender bien la importancia de
los tensores como objetos geometricos no comprometidos a un sistema de coordenadas elegido por un
observador particular.
Un observador en caıda libre ve a su alrededor
la actuacion de fuerzas de marea.
Dado una familia de geodesicas tendremos
una aceleracion relativa dada por aµ =
RµνρσTνT ρSσ
Vemos que el efecto de marea ha de ser asociado a que los objetos en caıda libre siguen geodesicas
de una variedad curva y que dicho efecto esta asociado a la curvatura de dicha variedad que viene
controlada por el tensor de Riemann.
Un observador en caıda libre determina en un
punto que vive en un espacio de Minkowski.
En un punto podemos utilizar coordenadas
normales para que gµν = ηµν .
Aquı se pone de manifiesto el contenido fısico de las coordenadas normales en el contexto gravi-
tatorio. Esas son las coordenadas que puede elegir un observador en caıda libre en cada punto de su
trayecto.
La luz se curva por efecto de la gravedad. Para dar cuenta de la relacion entre la grave-
dad con cualquier forma de energıa hemos de
emplear el tensor de energıa-momento, Tµν .
13.2. LAS ECUACIONES DE EINSTEIN 121
13.2. Las ecuaciones de Einstein
Todo lo que hemos discutido nos lleva a la conclusion de que la gravedad la hemos de considerar
como un efecto de la geometrıa del espaciotiempo. Ahora bien, en Newton la gravedad viene deter-
minada, a traves de la ecuacion de Poisson, por la densidad de masa. Sin embargo, para Einstein, la
masa y la energıa son sinonimos y por la curvatura de la luz en presencia de un campo gravitatorio
podemos decir que la fuente de la gravedad es cualquier forma de energıa. Ası que cualquier forma de
energıa tendra la capacidad para alterar a su alrededor la geometrıa del espaciotiempo. Las ecuaciones
que ligan la geometrıa del espaciotiempo con la distribucion de energıa y sus flujos son las ecuaciones
de Einstein.
Bien, tenemos que relacionar la curvatura de una variedad con la distribucion de energıa en la
misma. Para la energıa sabemos que el objeto que controla la densidad de energıa y sus flujos punto a
punto es el tensor de energıa-momento. La curvatura esta controlada por el tensor de Riemann. Pero
no podemos hacer una ecuacion que involucre al tensor de Riemann y al tensor de energıa-momento
porque sus ındices no concuerdan y sus simetrıas mucho menos.
Afortunadamente podemos obtener un tensor de dos ındices simetrico a partir del Riemann, el
tensor de Ricci. Ası que podrıamos proponer:
Rµν = κTµν
Sin embargo, esto no puede funcionar. La teorıa de la relatividad general ha de ser consistente
con el hecho de la conservacion del tensor energıa-momento en cada punto de la variedad. Ası que
tomando derivada covariante en la expresion anterior tendrıamos:

122 CAPITULO 13. FISICA Y MATEMATICAS: LAS ECUACIONES DE EINSTEIN
∇µRµν 6= κ∇µTµν
Pero que no suenen las alarmas. Nosotros conocemos un tensor de dos ındices y simetrico construido
a partir del Riemann y cuya derivada covariante es nula, el tensor de Einstein. Por lo tanto podemos
proponer, y habremos acertado, las ecuaciones de Einstein de la relatividad general:
Gµν = κTµν
Para fijar el valor de la constante que aparece en las ecuaciones de Einstein tenemos que hacer una
tarea delicada. Hemos de mostrar que en el lımite de bajas energıas y bajas velocidades la relatividad
general se reduce a la teorıa de la gravitacion de Newton. Es una prueba de consistencia por excelencia.
La relatividad general no viene a reemplazar a Newton en el regimen donde la gravedad newtoniana
ha demostrado funcionar realmente bien, viene a dar una generalizacion y a dar un esquema que sea
consistente con principios muy fundamentales de la fısica. Ası, que si uno hace ese ejercicio encontrara
que (tomando c=1):
13.2. LAS ECUACIONES DE EINSTEIN 123
Nos seguimos leyendo. . .
124 CAPITULO 13. FISICA Y MATEMATICAS: LAS ECUACIONES DE EINSTEIN
Capıtulo 14
Bibliografıa comentada
Los libros que voy a poner aquı los he usado, los he trabajado y los he disfrutado. Si estan aquı es
porque son los mas me gustan.
14.1. Para la matematica pura y dura
Para la parte matematica voy a elegir dos textos especıficos aunque todos los de relatividad general
propiamente dicha tratan dichos temas en mayor o menor medida.
Un libro que considero que es una delicia en todos los aspectos es:
Chris Isham, Modern differential geometry for physicsist - World Scientific Lecture Notes
in Physics, vol.61 - 2o edicion. (1993)
En ese libro teneis una presentacion muy buena de la geometrıa diferencial con un estilo directo y
simple (en su contexto). Un perfecto punto de inicio para adentrarse en este mundo de la geometrıa
diferencial y enfocado a la fısica. En el libro hay mucha mas informacion de la que es necesaria para
125
126 CAPITULO 14. BIBLIOGRAFIA COMENTADA
la relatividad general pero esta toda la que sı se necesita.
Otro libro que cubre los aspectos de los que se aquı tratan y mas con un estilo peculiar y fresco es:
John Baez y Javier P. Muniain, Gauge fields, knots and gravity, World Scientific, Series on
knots and everyting, vol. 4. (1994)
Como dice el tıtulo trata los campos gauge, nudos y gravedad. Introduce todo lo necesario desde
el punto de vista matematico para tener control sobre el tema. Y todo con el estilo que transpira Baez
y su escuela a la hora de hablar de las cosas mas abstractas de la matematica como si fuera el pan
nuestro de cada dıa. Totalmente recomendable. Justo y necesario.
Y para los que el tema de la topologıa les haya sabido a poco os voy a dejar un texto online que es
una obra maestra. Es obra del profesor de la Universidad Autonoma de Madrid, Fernando Chamizo:
La topologıa de segundo no es tan difıcil
https://www.uam.es/personalpdi/ciencias/fchamizo/asignaturas/to2009/topologian0305/APtopo.pdf
Todo un senor curso de topologıa general para disfrutarlo de principio a fin. Decir que es genial se
queda corto.
14.2. Relatividad General
Por ahora solo voy a poner el que ha de ser considerado como el libro por excelencia sobre relati-
vidad general. En mi opinion, claro esta. El Wald.
Robert M. Wald, General Relativity, Chicago University Press, (1984).
El libro.