Relating Translational and Rotational Variables - · PDF fileRelating Translational and...
22
Transcript of Relating Translational and Rotational Variables - · PDF fileRelating Translational and...
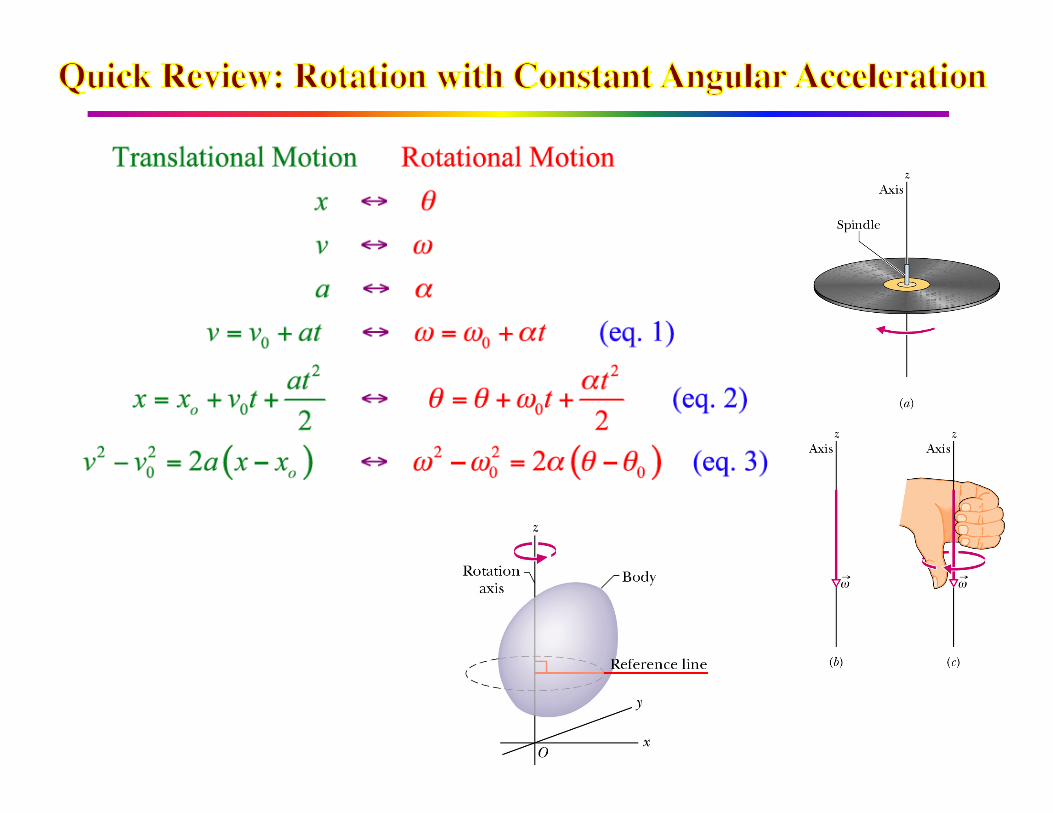
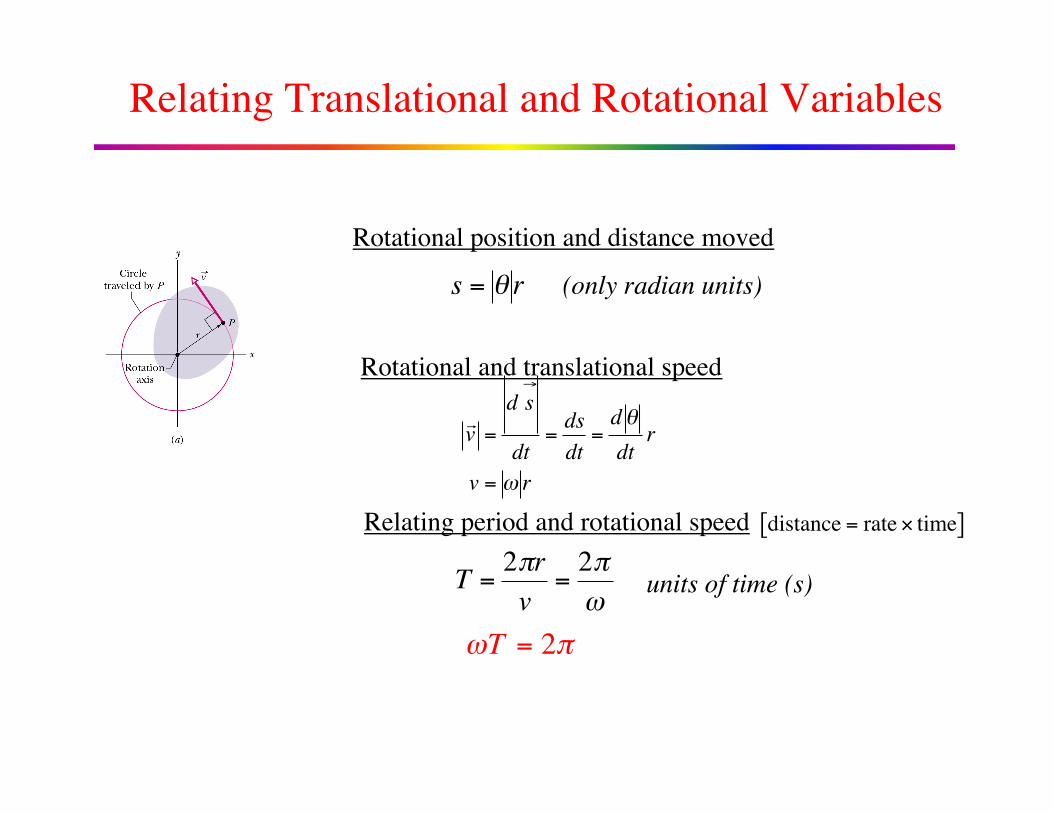
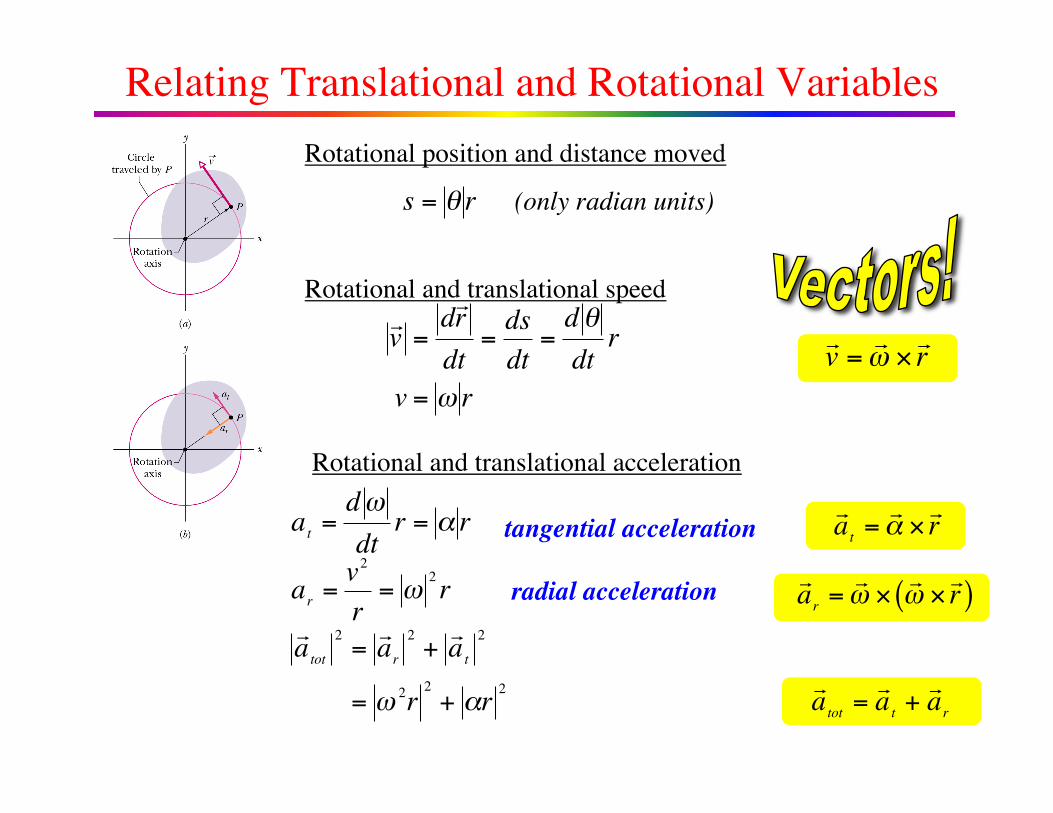
Relating Translational and Rotational Variables
Rotational position and distance moved
€
s = θ r (only radian units)
Rotational and translational speed
€
v =d s→
dt=
dsdt
=d θdt
r
v = ω r
Relating period and rotational speed
€
T =2πrv
=2πω
units of time (s) €
distance = rate× time[ ]
ωT = 2π
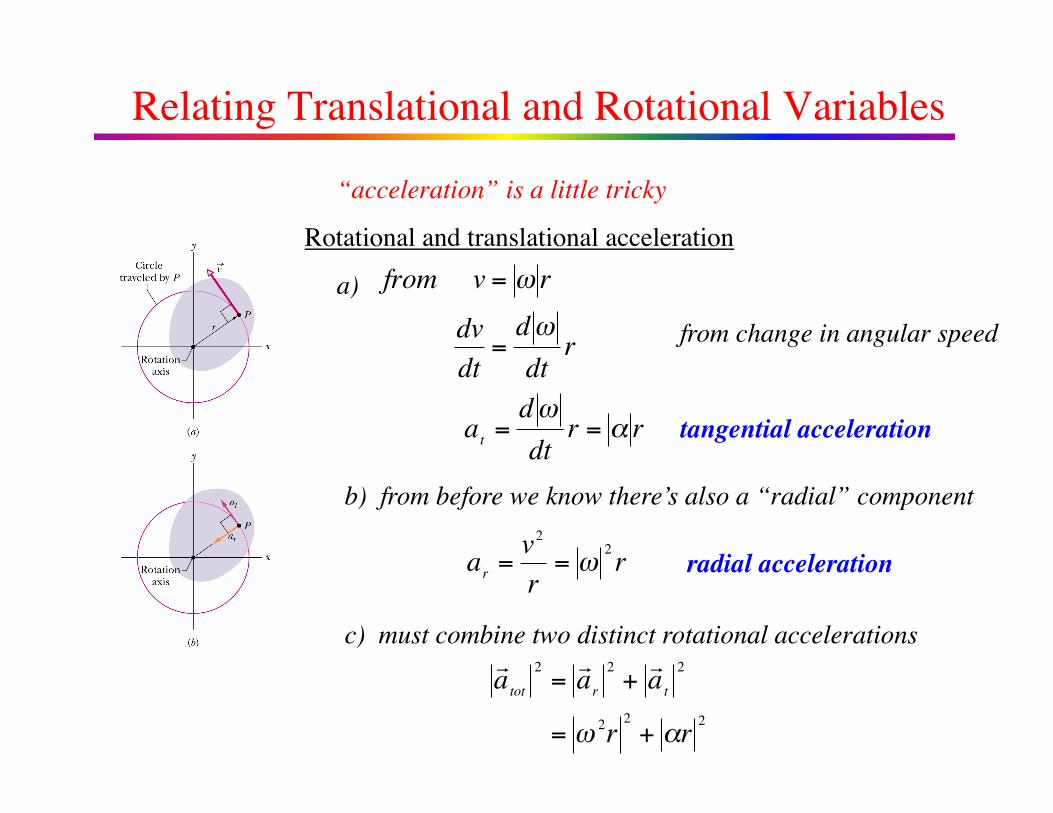
Relating Translational and Rotational Variables
Rotational and translational acceleration
“acceleration” is a little tricky
from change in angular speed
tangential acceleration
€
at =dωdt
r = α r
b) from before we know there’s also a “radial” component
€
ar =v2
r= ω
2r radial acceleration
€
from v = ω r
dvdt
=dωdt
r
a)
€
a tot
2= a r
2+ a t
2
= ω 2r2
+ αr 2
c) must combine two distinct rotational accelerations
Relating Translational and Rotational Variables Rotational position and distance moved
€
s = θ r (only radian units)
Rotational and translational speed
€
v =d r dt
=dsdt
=d θdt
r
v = ω r
Rotational and translational acceleration
tangential acceleration
€
at =dωdt
r = α r
€
ar =v2
r= ω
2r radial acceleration
€
a tot
2= a r
2+ a t
2
= ω 2r2
+ αr 2
€
v = ω × r
€
a t = α × r
€
a r = ω ×
ω × r ( )
€
a tot = a t + a r
€
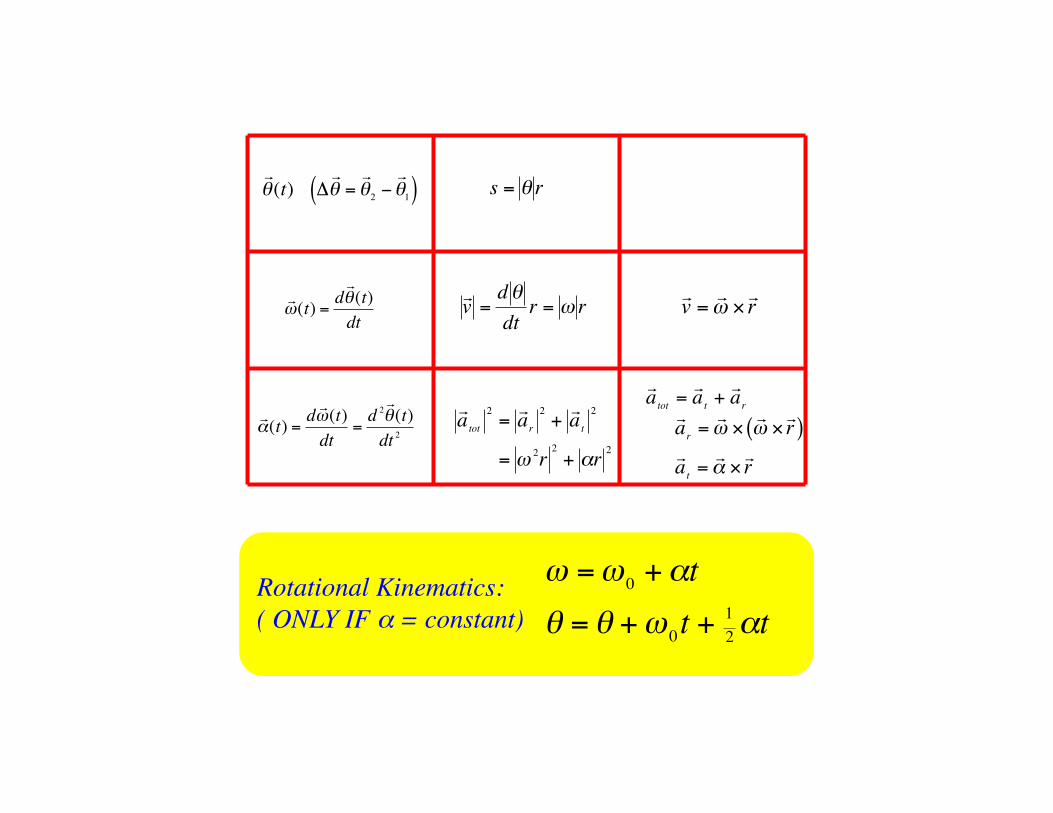
θ (t) Δ
θ = θ 2 − θ 1( )
€
ω (t) =
d θ (t)dt
€
α (t) =
d ω (t)dt
=d 2 θ (t)dt 2
€
v =dθdt
r = ω r€
s = θ r
€
a tot
2= a r
2+ a t
2
= ω 2r2
+ αr 2
€
v = ω × r
€
a t = α × r
€
a r = ω ×
ω × r ( )
€
a tot = a t + a r
Rotational Kinematics: ( ONLY IF α = constant)
€
ω =ω 0 +αtθ = θ +ω 0t + 1
2αt
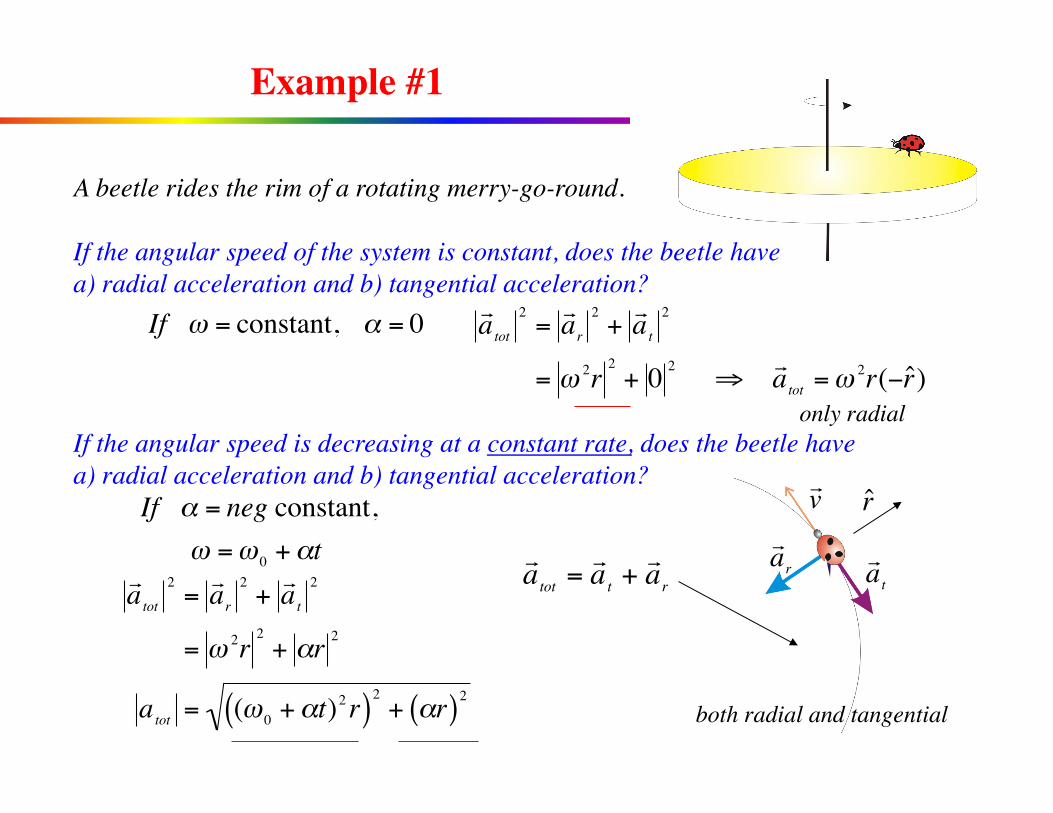
Example #1
A beetle rides the rim of a rotating merry-go-round.
If the angular speed of the system is constant, does the beetle have a) radial acceleration and b) tangential acceleration?
If the angular speed is decreasing at a constant rate, does the beetle have a) radial acceleration and b) tangential acceleration?
€
If ω = constant, α = 0
€
If α = neg constant, ω =ω 0 +αt
€
v
€
a t
€
a r
€
a tot
€
ˆ r
€
a tot
2= a r
2+ a t
2
= ω 2r2
+ 0 2 ⇒ a tot =ω 2r(−ˆ r )only radial
€
a tot
2= a r
2+ a t
2
= ω 2r2
+ αr 2
atot = (ω 0 +αt)2r( )2 + αr( )2 both radial and tangential
€
a tot = a t + a r
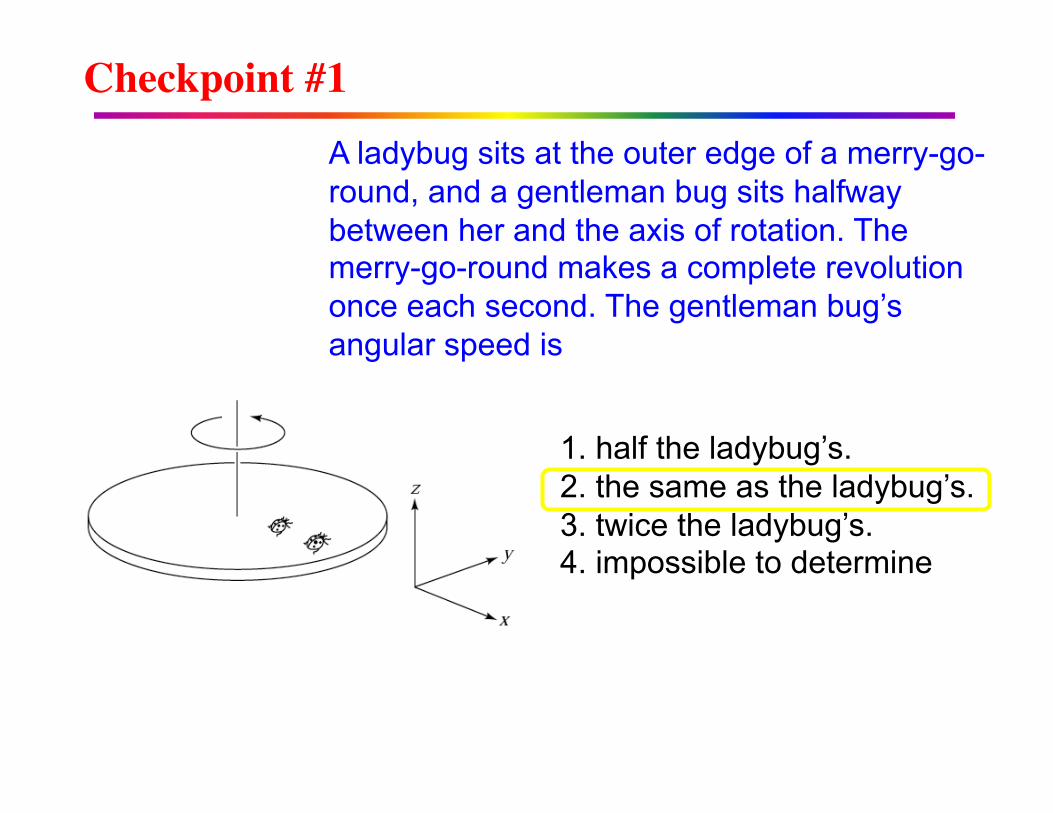
Checkpoint #1 A ladybug sits at the outer edge of a merry-go- round, and a gentleman bug sits halfway between her and the axis of rotation. The merry-go-round makes a complete revolution once each second. The gentleman bug’s angular speed is
1. half the ladybug’s. 2. the same as the ladybug’s. 3. twice the ladybug’s. 4. impossible to determine
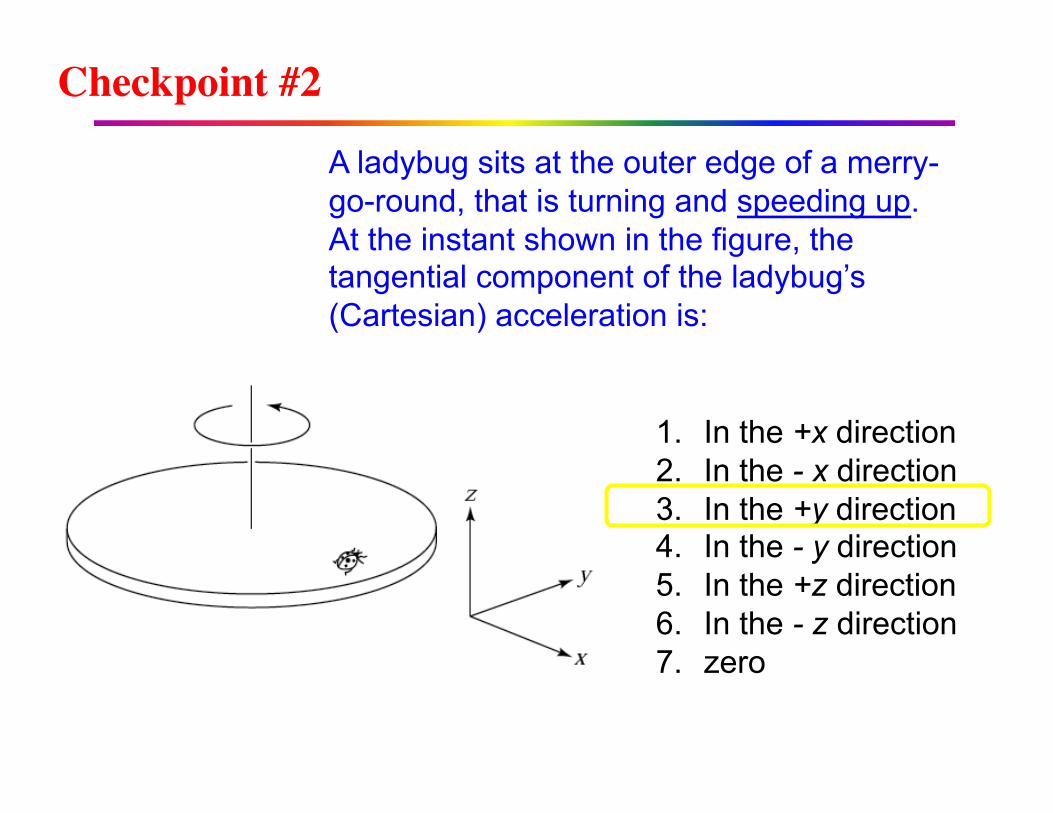
Checkpoint #2
A ladybug sits at the outer edge of a merry-go-round, that is turning and speeding up. At the instant shown in the figure, the tangential component of the ladybug’s (Cartesian) acceleration is:
1. In the +x direction 2. In the - x direction 3. In the +y direction 4. In the - y direction 5. In the +z direction 6. In the - z direction 7. zero
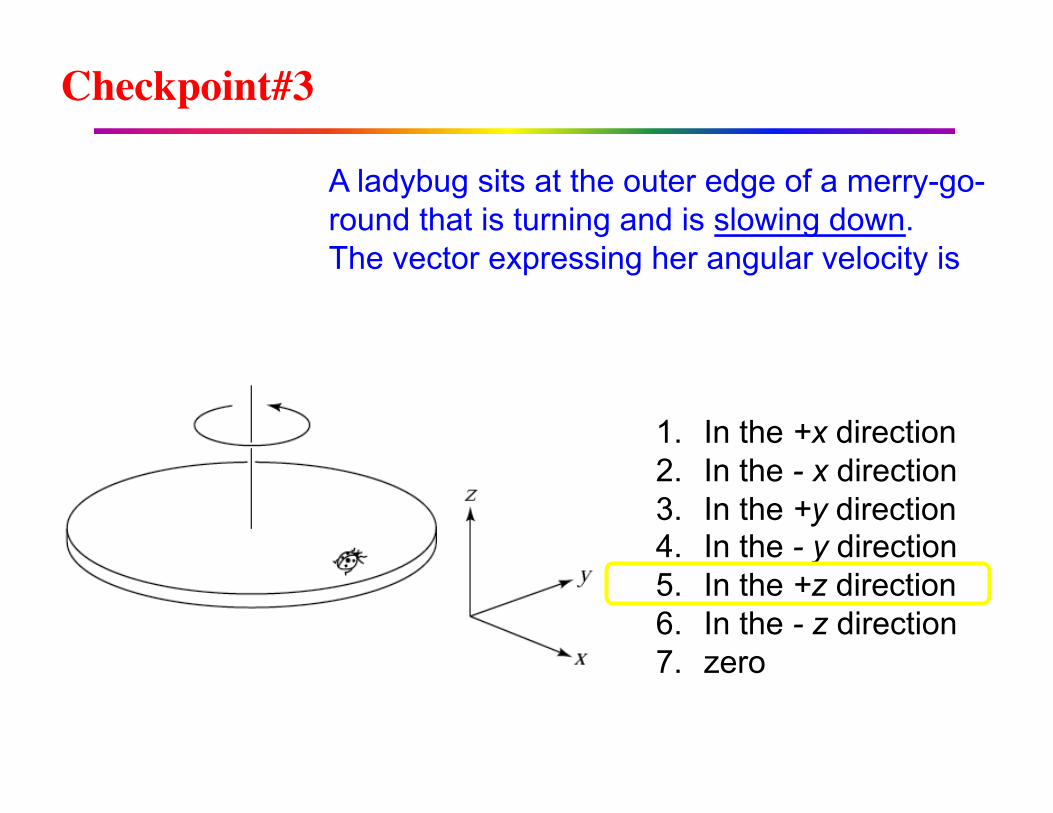
Checkpoint#3 A ladybug sits at the outer edge of a merry-go- round that is turning and is slowing down. The vector expressing her angular velocity is
1. In the +x direction 2. In the - x direction 3. In the +y direction 4. In the - y direction 5. In the +z direction 6. In the - z direction 7. zero
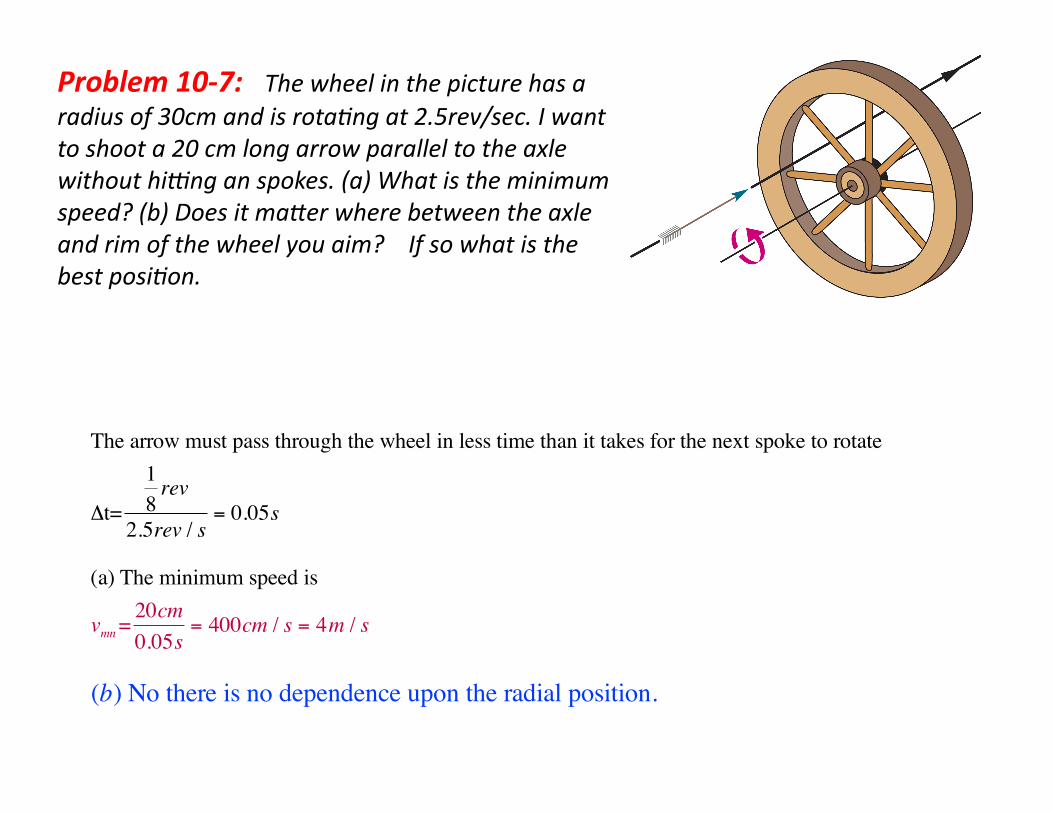
Problem10‐7:Thewheelinthepicturehasaradiusof30cmandisrota6ngat2.5rev/sec.Iwanttoshoota20cmlongarrowparalleltotheaxlewithouthi?nganspokes.(a)Whatistheminimumspeed?(b)DoesitmaGerwherebetweentheaxleandrimofthewheelyouaim?Ifsowhatisthebestposi6on.
The arrow must pass through the wheel in less time than it takes for the next spoke to rotate
Δt=
18rev
2.5rev / s= 0.05s
(a) The minimum speed is
vmn= 20cm0.05s
= 400cm / s = 4m / s
(b) No there is no dependence upon the radial position.
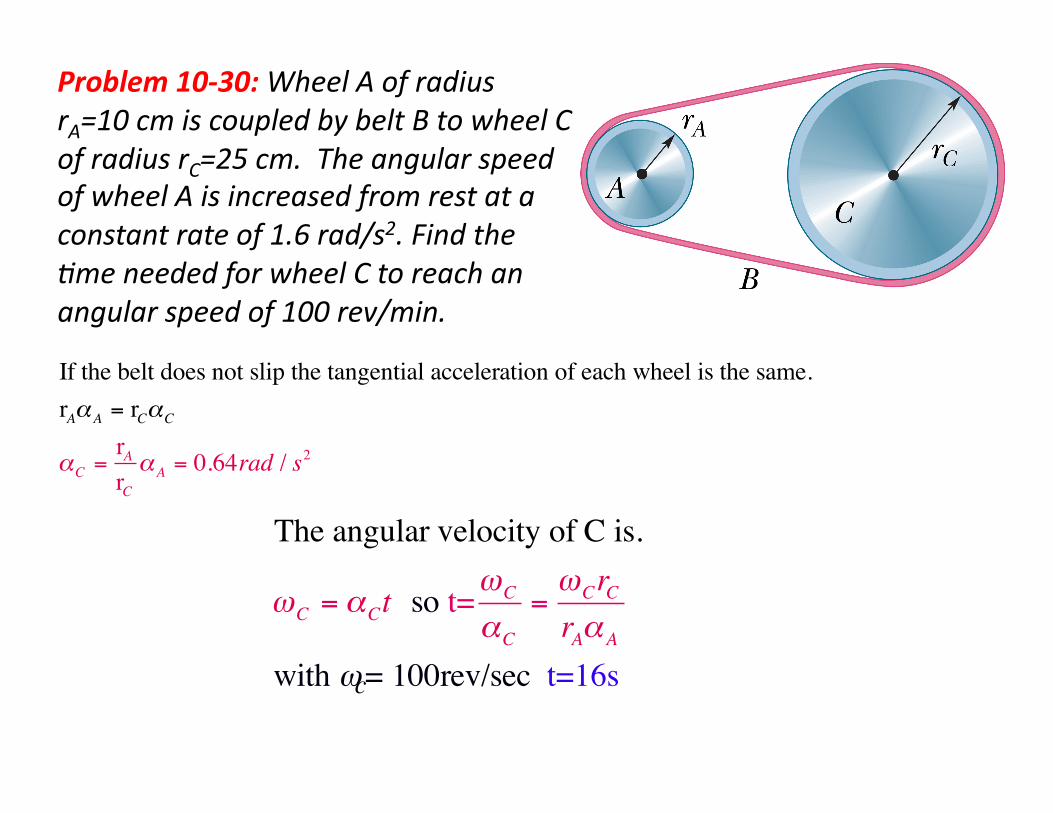
Problem10‐30:WheelAofradiusrA=10cmiscoupledbybeltBtowheelCofradiusrC=25cm.TheangularspeedofwheelAisincreasedfromrestataconstantrateof1.6rad/s2.Findthe6meneededforwheelCtoreachanangularspeedof100rev/min.
If the belt does not slip the tangential acceleration of each wheel is the same.rAαA = rCαC
αC =rArCαA = 0.64rad / s2
The angular velocity of C is.
ωC = αCt so t=ωC
αC
=ωCrCrAαA
with ω= 100rev/sec t=16s c
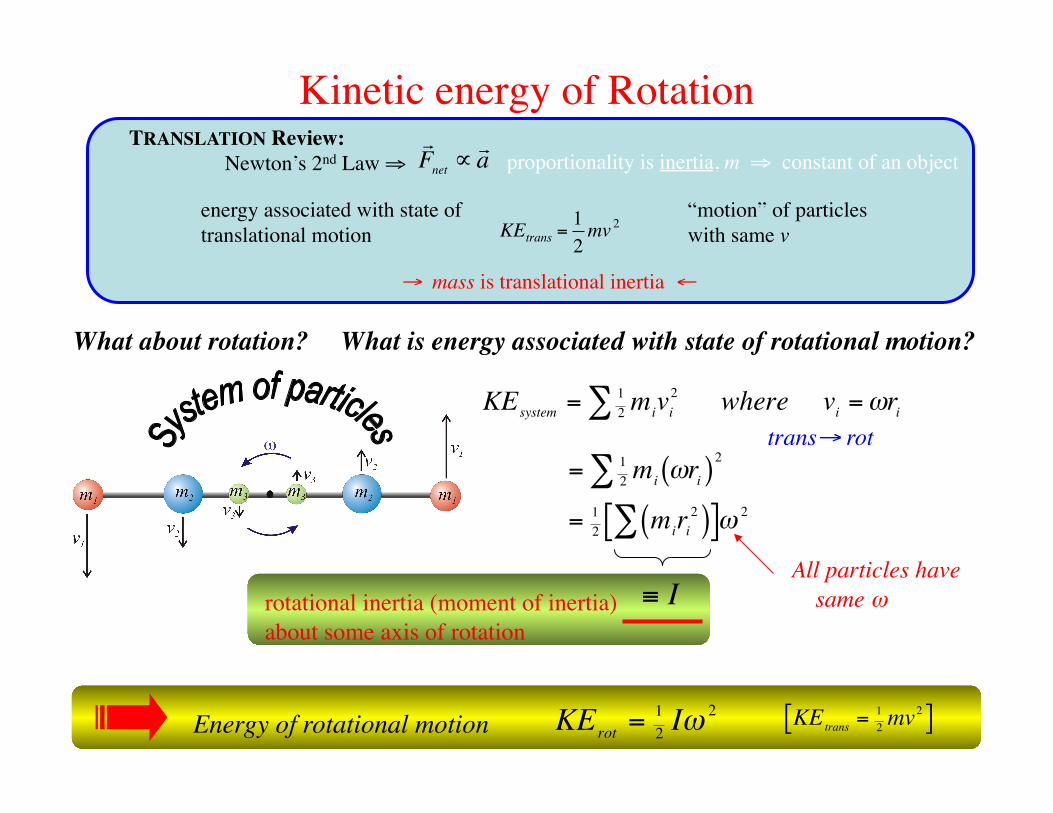
Kinetic energy of Rotation TRANSLATION Review:
Newton’s 2nd Law ⇒
€
F net ∝
a proportionality is inertia, m ⇒ constant of an object
€
KEtrans =12mv 2
energy associated with state of translational motion
“motion” of particles with same v
→ mass is translational inertia ←
What about rotation? What is energy associated with state of rotational motion?
€
= 12 mi∑ ωri( )2
= 12 miri
2( )∑[ ]ω 2 €
KEsystem = 12 mi∑ vi
2 where vi =ωritrans→ rot
All particles have same ω
€
≡ I rotational inertia (moment of inertia) about some axis of rotation
€
KErot = 12 Iω
2
€
KEtrans = 12 mv
2[ ] Energy of rotational motion
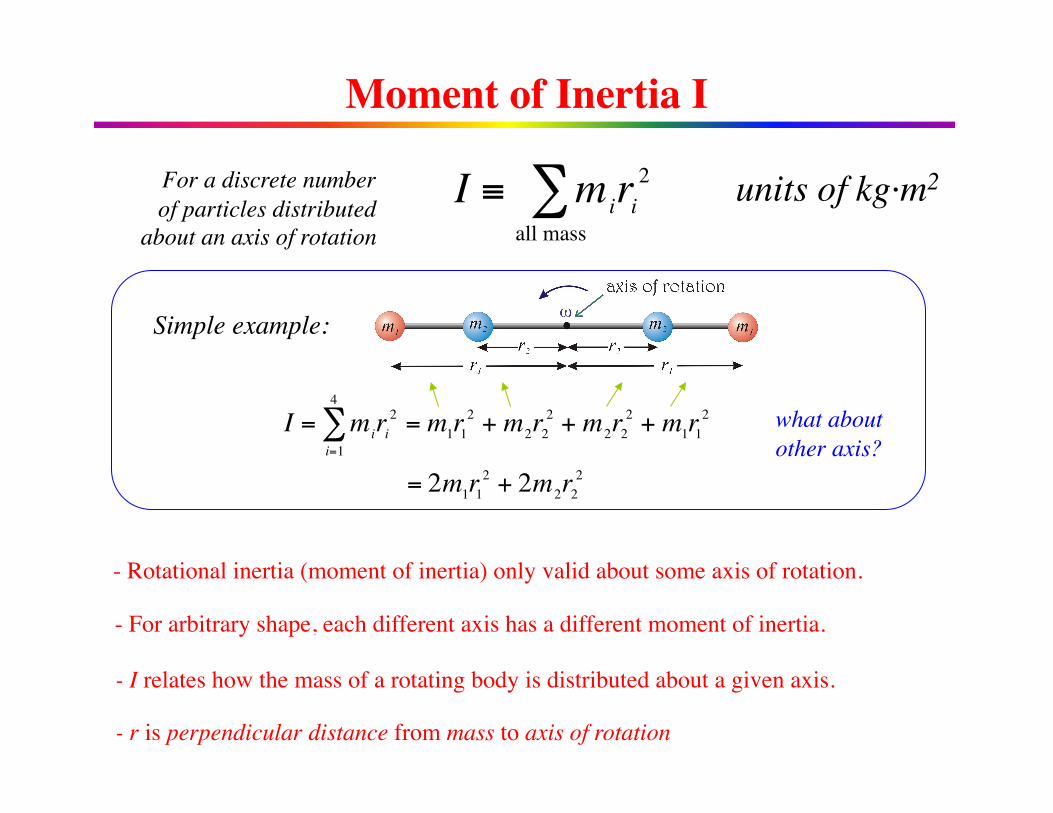
Moment of Inertia I
- Rotational inertia (moment of inertia) only valid about some axis of rotation.
€
I ≡ miri2
all mass∑For a discrete number
of particles distributed about an axis of rotation
- For arbitrary shape, each different axis has a different moment of inertia.
- I relates how the mass of a rotating body is distributed about a given axis.
units of kg·m2
€
I = miri2
i=1
4
∑ = m1r12 + m2r2
2 + m2r22 + m1r1
2
= 2m1r12 + 2m2r2
2
what about other axis?
- r is perpendicular distance from mass to axis of rotation
Simple example:
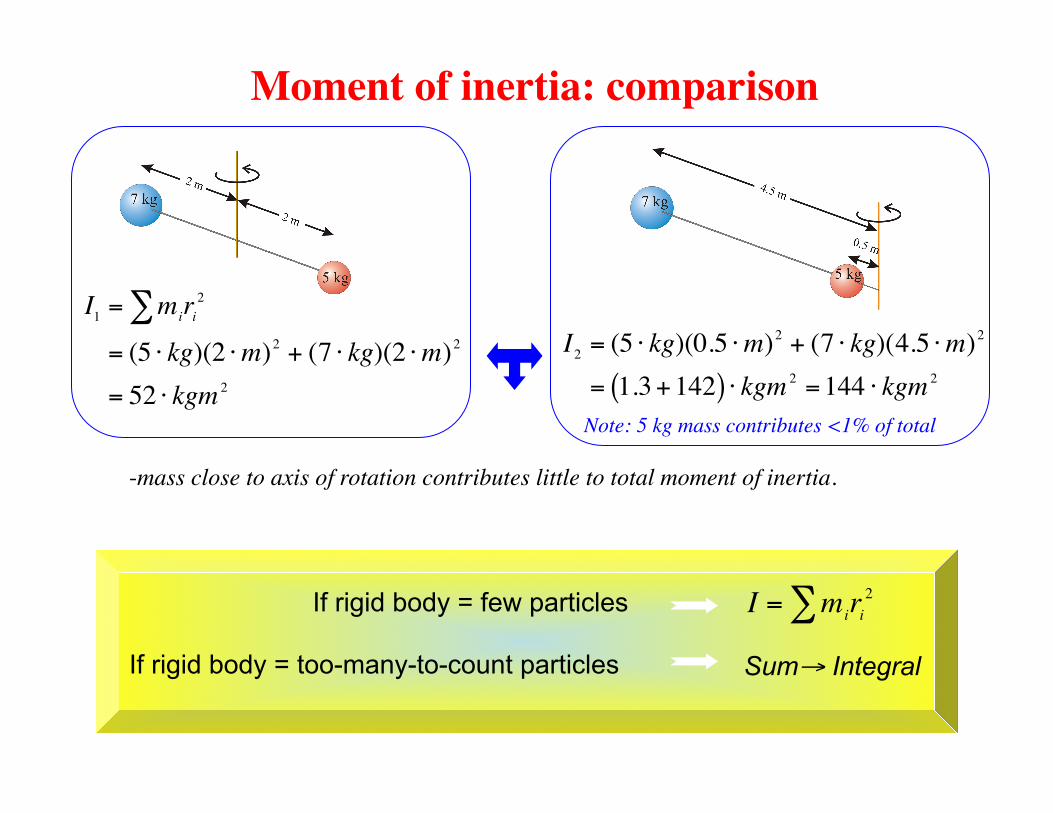
Moment of inertia: comparison
€
I2 = (5 ⋅ kg)(0.5 ⋅m)2 + (7 ⋅ kg)(4.5 ⋅m)2
= 1.3+142( ) ⋅ kgm 2 =144 ⋅ kgm 2
Note: 5 kg mass contributes <1% of total
- mass close to axis of rotation contributes little to total moment of inertia.
If rigid body = few particles
€
I = miri2∑
If rigid body = too-many-to-count particles Sum→ Integral
€
I1 = miri2∑
= (5 ⋅ kg)(2 ⋅m)2 + (7 ⋅ kg)(2 ⋅m)2
= 52 ⋅ kgm 2
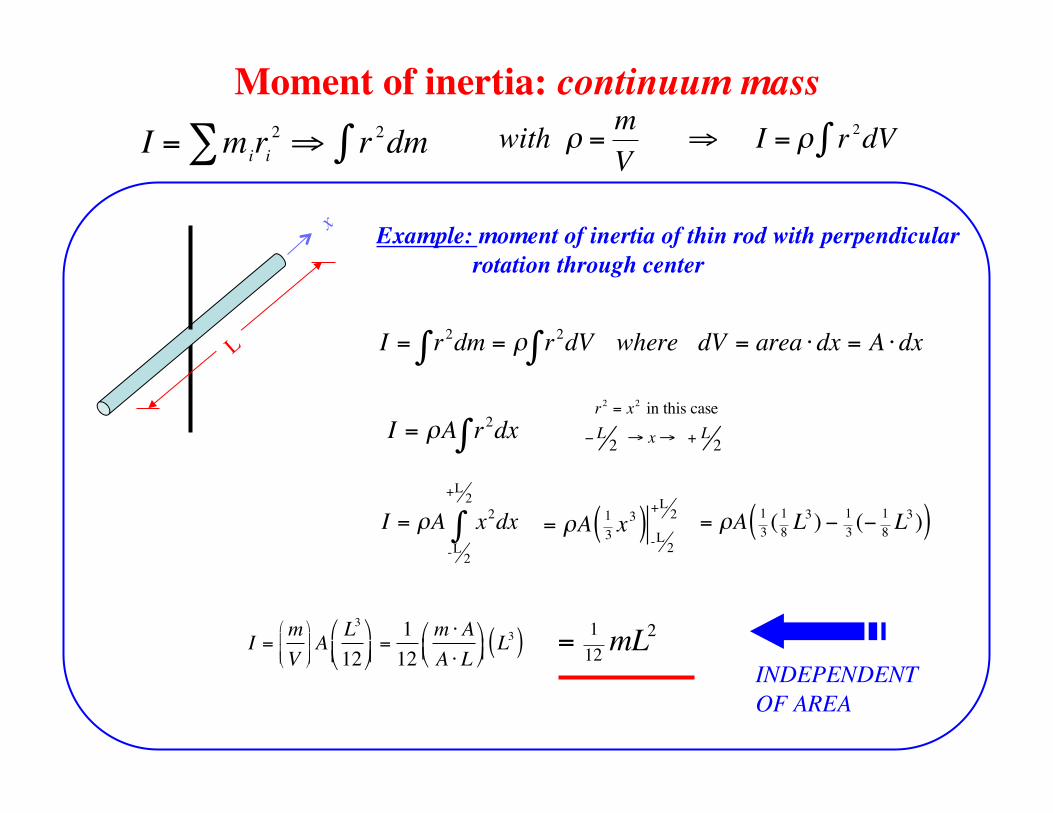
Moment of inertia: continuum mass
€
I = miri2∑ ⇒ r 2∫ dm
€
with ρ =mV
⇒ I = ρ r 2∫ dV
I = ρA x2
-L2
+L2
∫ dx
I = r2∫ dm = ρ r2dV∫ where dV = area ⋅dx = A ⋅dx
I = ρA r2dx ∫ r2 = x2 in this case
− L 2 → x→ + L 2
= ρA 13 x
3( )-L
2
+L2 = ρA 1
3 (18 L
3) − 13 (−
18 L
3)( )
I =mV
A
L3
12
=112
m ⋅ AA ⋅ L
L3( ) = 1
12 mL2
INDEPENDENT OF AREA
Example: moment of inertia of thin rod with perpendicular rotation through center
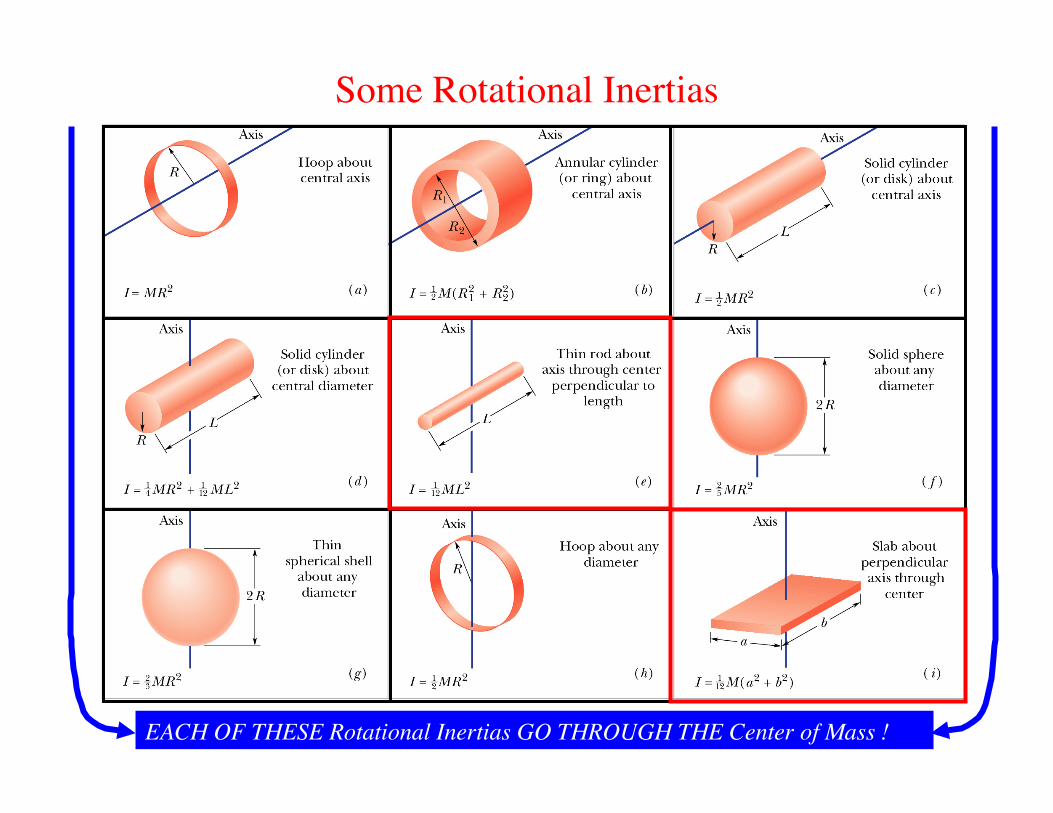
Some Rotational Inertias
EACH OF THESE Rotational Inertias GO THROUGH THE Center of Mass !
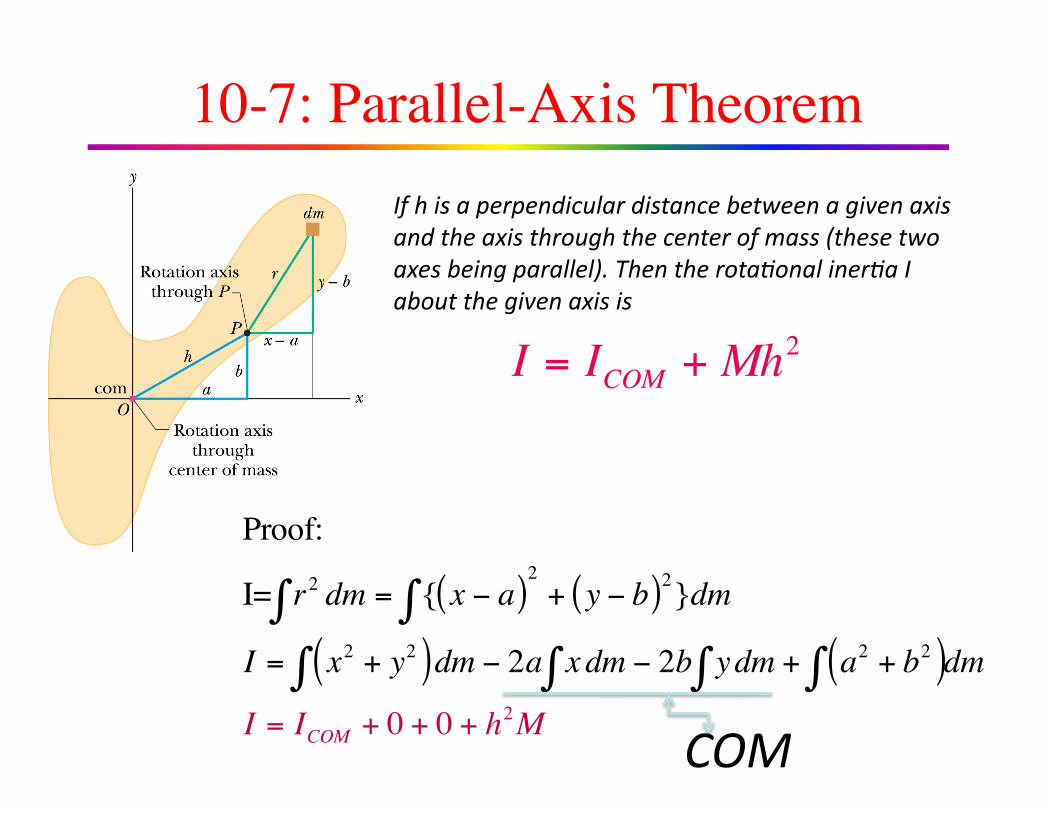
10-7: Parallel-Axis Theorem
Proof:
I= r2 dm = { x − a( )∫∫2+ y − b( )2}dm
I = x2 + y2( )dm − 2a xdm∫∫ − 2b ydm + a2 + b2( )∫∫ dm
I = ICOM + 0 + 0 + h2M
I = ICOM + Mh2
Ifhisaperpendiculardistancebetweenagivenaxisandtheaxisthroughthecenterofmass(thesetwoaxesbeingparallel).Thentherota6onaliner6aIaboutthegivenaxisis
COM
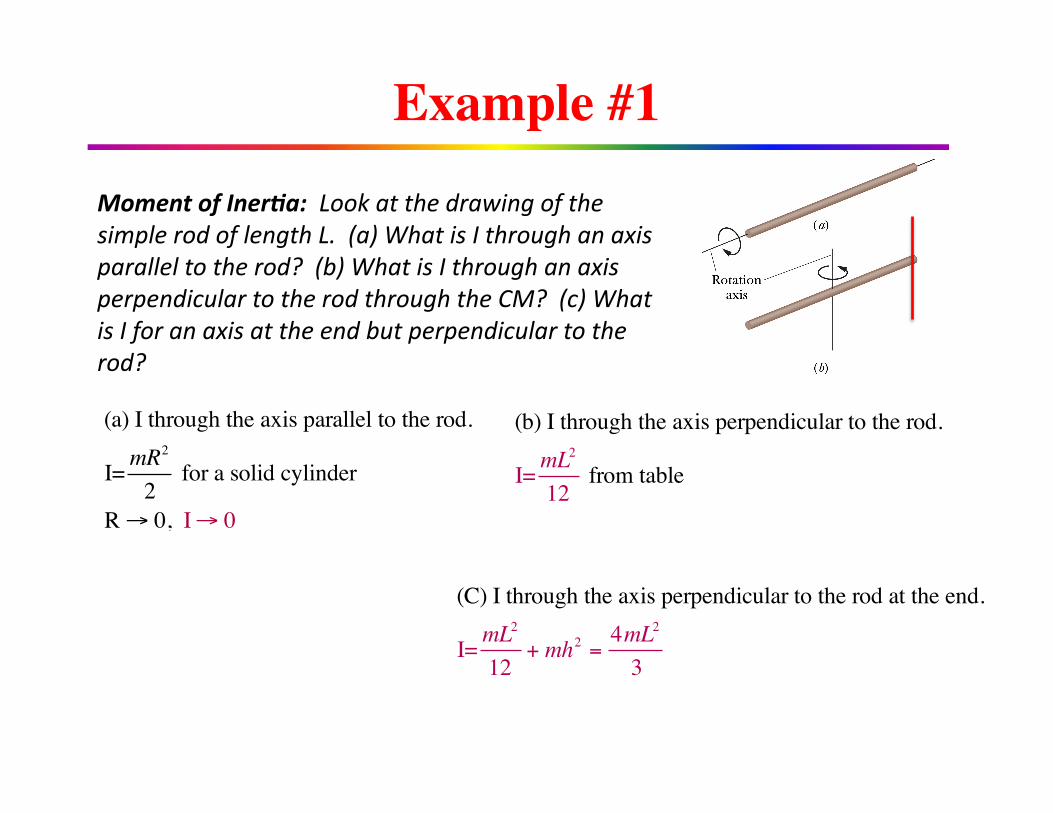
Example #1
MomentofIner4a:LookatthedrawingofthesimplerodoflengthL.(a)WhatisIthroughanaxisparalleltotherod?(b)WhatisIthroughanaxisperpendiculartotherodthroughtheCM?(c)WhatisIforanaxisattheendbutperpendiculartotherod?
(a) I through the axis parallel to the rod.
I=mR2
2 for a solid cylinder
R → 0, I→ 0
(b) I through the axis perpendicular to the rod.
I=mL2
12 from table
(C) I through the axis perpendicular to the rod at the end.
I=mL2
12+ mh2 =
4mL2
3
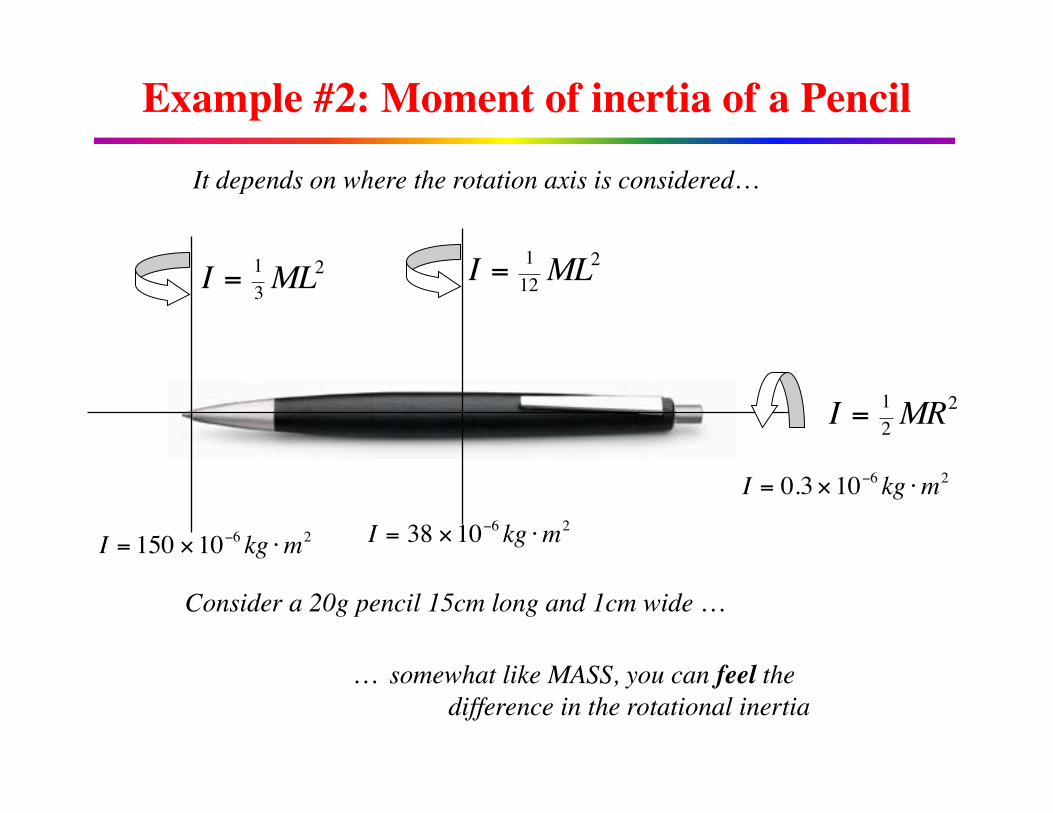
Example #2: Moment of inertia of a Pencil
It depends on where the rotation axis is considered…
I = 0.3×10−6 kg ⋅m2
I = 12 MR
2
I = 112 ML
2I = 1
3ML2
Consider a 20g pencil 15cm long and 1cm wide …
I = 38 ×10−6 kg ⋅m2I = 150 ×10−6 kg ⋅m2
… somewhat like MASS, you can feel the difference in the rotational inertia
Example #3
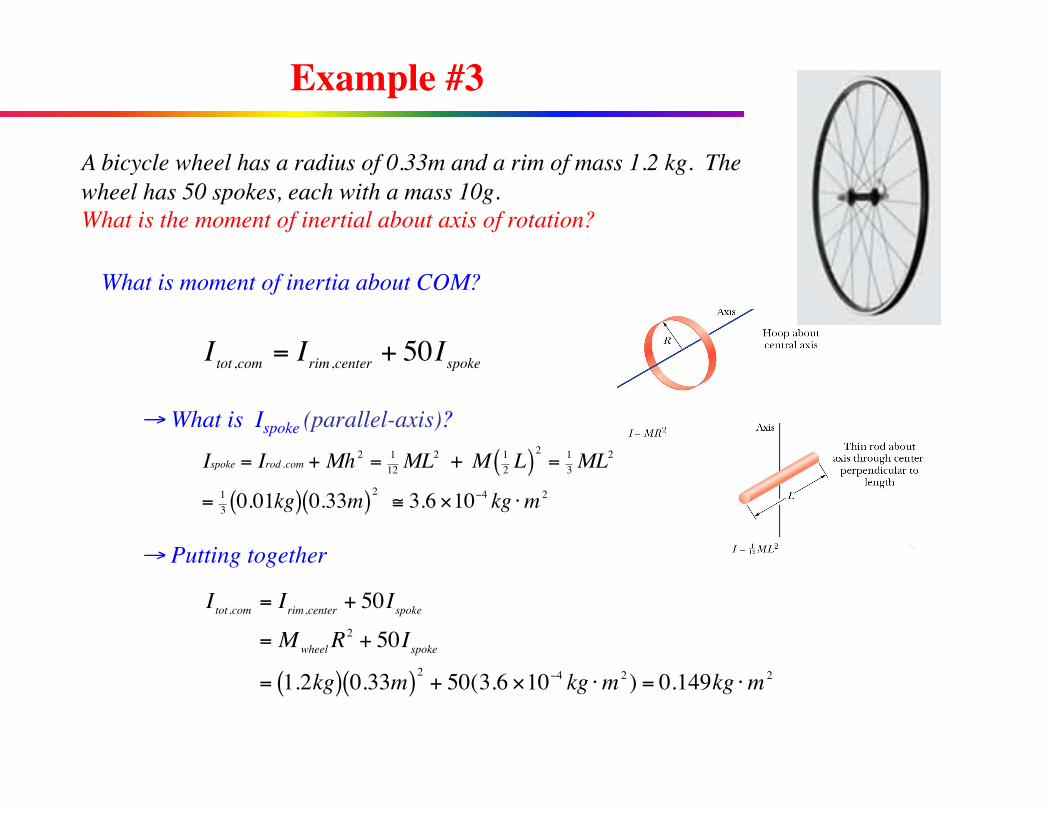
What is moment of inertia about COM?
→ What is Ispoke (parallel-axis)?
€
Ispoke = Irod .com + Mh 2 = 112 ML
2 + M 12 L( )
2= 1
3 ML2
= 13 0.01kg( ) 0.33m( )2 ≅ 3.6 ×10−4 kg ⋅m 2
A bicycle wheel has a radius of 0.33m and a rim of mass 1.2 kg. The wheel has 50 spokes, each with a mass 10g. What is the moment of inertial about axis of rotation?
€
Itot ,com = Irim ,center + 50Ispoke
→ Putting together
€
Itot ,com = Irim ,center + 50Ispoke= Mwheel R
2 + 50Ispoke= 1.2kg( ) 0.33m( )2 + 50(3.6 ×10−4 kg ⋅m 2 ) = 0.149kg ⋅m 2
Example #4
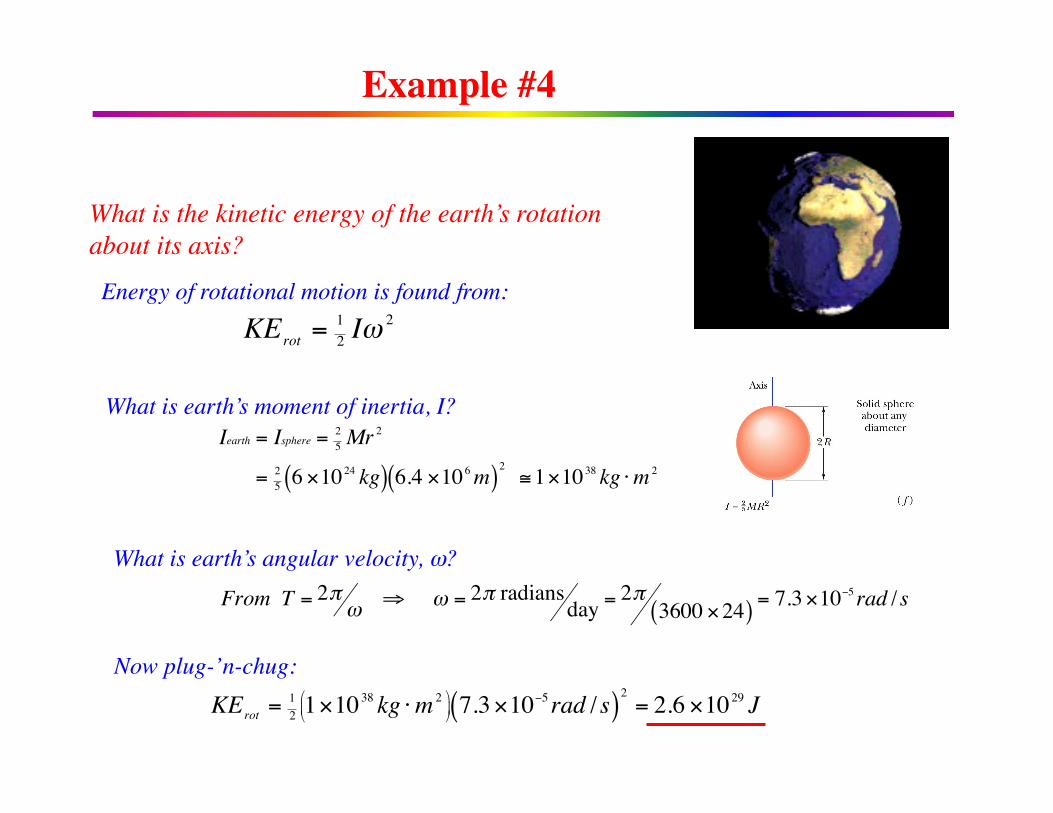
What is the kinetic energy of the earth’s rotation about its axis?
€
KErot = 12 Iω
2 Energy of rotational motion is found from:
What is earth’s moment of inertia, I?
€
Iearth = Isphere = 25 Mr
2
= 25 6 ×1024 kg( ) 6.4 ×106m( )2 ≅1×1038 kg ⋅m 2
What is earth’s angular velocity, ω?
€
ω = 2π radiansday = 2π
3600 ×24( ) = 7.3×10−5rad /s
Now plug-’n-chug:
€
KErot = 12 1×1038 kg ⋅m 2
7.3×10−5rad /s( )2
= 2.6 ×1029 J €
From T = 2πω ⇒