Rapport étape final - UQAC · 3.5.3.3 Programme qui corrige le signal 36 3.5.3 ... 60, 63, 70 et...
64
Université du Québec à Chicoutimi Rapport étape final Projet de synthèse en ingénierie 6GIN555 Développement d’un instrument de mesure industriel pour la mesure de la conductivité électrique des anodes Département des Sciences Appliquées Module d’ingénierie Coordonnateur Conseiller M. Jacques Paradis M. Daniel Audet Auteur Éric Goudreault
Transcript of Rapport étape final - UQAC · 3.5.3.3 Programme qui corrige le signal 36 3.5.3 ... 60, 63, 70 et...

Université du Québec à Chicoutimi
Rapport étape final
Projet de synthèse en ingénierie
6GIN555
Développement d’un instrument de mesure industriel pour la mesure de la conductivité électrique des anodes
Département des Sciences Appliquées Module d’ingénierie
Coordonnateur Conseiller
M. Jacques Paradis M. Daniel Audet
Auteur Éric Goudreault

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page I
TABLE DES MATIÈRES
1. INTRODUCTION 1
1.1 Contexte 1
1.2 Présentation synthétique des différentes parties 2
2. PRÉSENTATION DU PROJET 2
2.1 Description de l’entreprise 2
2.2 Description de l’équipe de travail 3
2.3 Problématique 3
2.4 Objectifs du projet 3
3. TRAVAIL RÉALISÉ 4
3.1 Principe de fonctionnement de la sonde 4 3.1.1 Principe de la bobine d’excitation 4 3.1.2 Principe des bobines réceptrices 5 3.1.3 Influence des anodes 7 3.1.4 Familiarisation avec le programme de monitoring 11
3.2 Conception de la mesure de la conductivité électrique 12 3.2.1 Contraintes de réalisation 12
3.2.1.1 Fréquence de fonctionnement 12 3.2.1.2 Facteur de sécurité relié au champ magnétique des bobines 13
3.2.2 Méthodologie utilisée pour le dimensionnement des bobines 13 3.2.3 Calcul des valeurs importantes du prototype miniature 15 3.2.4 Calcul du prototype industriel 17 3.2.5 Résultat de la bobine émettrice 18 3.2.6 Résultat des bobines réceptrices 19 3.2.7 Comparaison entre le prototype miniature et le prototype industriel 19 3.2.8 Conception du circuit émetteur 20 3.2.9 Conception du circuit récepteur 20 3.2.10 Conception des bobines enfichables 20
3.3 Conception et installation des bobines 21
3.4 Composantes mécaniques 22 3.4.1 Manutention des anodes 22 3.4.2 Conception des supports complets des bobines 23 3.4.3 Centrage des anodes 24

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page II
3.5 Automatisation 26 3.5.1 Matériel nécessaire 26
3.5.1.1 Processeur de l’automate 26 3.5.1.2 Protocole de communication avec usine 26 3.5.1.3 Écran tactile 27 3.5.1.4 Acquisition des données de la sonde par l’automate 27
3.5.2 Relations et facteurs importants à considérer pour la programmation de l’automate 27 3.5.2.1 Relation entre le signal réel de la conductivité électrique entre une anode non cuite et cuite 27 3.5.2.2 Facteur extérieur indésirable pour le signal de la sonde 31 3.5.2.3 Augmentation de l’acquisition de données (voir différence avec les courbes pour montrer qu’on ne voit plus les sommets du signal) 31 3.5.2.4 Correction du signal en fonction du temps 33 3.5.2.5 Correction du signal en fonction de la température 34
3.5.3 Programmation de l’automate 35 3.5.3.1 Diagramme de flux niveau 1 35 3.5.3.2 Programme calculant la valeur inférieure moyenne et supérieure 35 3.5.3.3 Programme qui corrige le signal 36 3.5.3.4 Programme vérifiant si la donnée est positive ou négative et la fiabilité du signal 37
3.5.4 Interface homme-machine 39
4. BILAN DES ACTIVITÉS 41
4.1 Arrimage formation pratique/universitaire 41
4.2 Travail d’équipe 41
4.3 Respect de l’échéancier 41 4.3.1 Diagramme de Gantt 42 4.3.2 Changement à l’échéancier 44
4.4 Analyse et discussion 44
5. CONCLUSION ET RECOMMANDATIONS 45
6. ANNEXE A : CAHIER DES CHARGES 46
INTRODUCTION 46
Objectif du document 46
DESCRIPTION DU PROJET 46
Contexte 46
Réalisation du projet 46 1. Conception de la mesure de la conductivité électrique 46

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page III
1.1 La bobine d’excitation 46 1.2 Les deux bobines réceptrices 47
2. Composantes mécaniques 47 2.1 Moyen de manutention 47 2.2 Supports complet des bobines 47
3. Automatisation 47 3.1 Pièce nécessaire 47 3.2 Programmation de l’automate 48 3.3 Interface homme-machine 48
4. Vue d’ensemble 48
7. ANNEXE B : DEVIS 49
INTRODUCTION 49
Objectif du document 49
DESCRIPTION DU PROJET 49
Contexte 49
Réalisation du projet 49 1. Conception de la mesure de la conductivité électrique 50
1.1 La bobine d’excitation 50 1.2 Les deux bobines réceptrices 51
2. Composantes mécaniques 51 2.1 Moyen de manutention 52 2.2 Supports complets des bobines 52
3. Automatisation 53 3.1 Achat 53 3.2 Programmation de l’automate 53 3.3 Interface homme-machine 55
5. Vue d’ensemble 57
8. REMERCIEMENTS 59
9. RÉFÉRENCE 59

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page IV
Liste des figures
Figure 1 : Schéma du système permettant de mesurer la conductivité électrique des anodes avant la cuisson selon le brevet #7576534. 2 Figure 2: Circuit électrique de la bobine d'excitation 5 Figure 3: Représentation schématique de la loi permettant de calculer le champ que créé chaque spire à un point donné 6 Figure 4: Schéma électrique des bobines réceptrices connectées en différentiel 7 Figure 5: Représentation d'une bobine réceptrice et d'une anode 8 Figure 6: Programme de visualisation des données de la sonde en temps réel sur ordinateur via port série RS-232 12 Figure 7 : Bobines secondaires enfichables une dans l'autre 21 Figure 8: Convoyeur à rouleau non métallique «NMR-6689» de la compagnie «Globe Composite Solutions Ltd.» 23 Figure 9: Convoyeur et support à bobine 24 Figure 10: Support à bobine vue de face 25 Figure 11: Partie réelle du signal de la sonde de 6 anodes cuites passées dans le mauvais sens (53, 58, 60, 63, 70 et 71µΩ-m) 28 Figure 12:Valeur du signal réel de 6 anodes cuites passées debout à travers la sonde 29 Figure 13: Signal imaginaire en fonction de la mesure de la conductivité mesurée en usine 30 Figure 14: Partie réelle 16 bits du signal de la sonde de 9 échantillons d’anodes non cuites 30 Figure 15: Signal réel 16 bits d'une anode non cuite en fonction du temps 32 Figure 16: Exemple d'échantillonnage inadéquat du signal de la sonde 33 Figure 17: Variation de la référence du signal réel pour le temps maximum de passage d’une anode dans la sonde 34 Figure 18: Diagramme de flux niveau 1 du programme général 35 Figure 19: Représentation schématique du programme de vérification de l'exactitude du signal 37 Figure 20: Représentation schématique pour savoir si le côté positif est plus fiable que le côté négatif 38 Figure 21: Représentation de l'IHM 39 Figure 22: Tableau du diagramme de Gantt 1/2 42 Figure 23: Tableau du diagramme de Gantt 2/2 43 Figure 24: Schéma du circuit de la bobine d’excitation 50 Figure 25: Représentation de l'IHM 55 Figure 26: Vue d'ensemble du système de mesure et d'automatisation 57 Figure 27: Schéma de représentation du convoyeur et des supports complets des bobines 58

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 1
1. Introduction
1.1 Contexte L’entreprise Hades et M. Daniel Audet, ing. Ph.D, ont élaboré d’un système capable de
mesurer la conductivité électrique d’une anode non cuite. Actuellement, il faut attendre
que ces anodes soient cuites afin de mesurer cette conductivité et leur temps de cuisson
est d’environ de 10 à 15 jours. Ces anodes sont utilisées même si la conductivité
électrique n’est pas idéale puisque leur coût de production est très élevé.
Un tel système permettrait de contrôler la qualité des anodes avant qu’elles ne soient
cuites. Les anodes non conformes retourneraient au remoulage jusqu’à ce qu’elles soient
conformes. Puisque les anodes auraient une conductivité électrique moyenne plus élevée,
la perte de chaleur et la dégradation des anodes seraient moindres. Donc, le principal
avantage viendrait du fait que le coût énergétique pour produire de l’aluminium
diminuerait. En fait, cela permettra aux usines de produire plus d’aluminium pour le
même prix.
Le principe de fonctionnement de l’appareil de mesure est schématisé à la figure 1 ci-
dessous [1]. Premièrement, un courant sinusoïdal est créé par le générateur AC (#18 de
la figure 1). La bobine primaire (#14 de la figure 1) génère un champ magnétique
lorsqu’un courant la traverse. Les anodes, servant de noyau, passent dans le centre des
bobines et ont une conductivité différente l’une de l’autre. Ce champ magnétique
alternatif est donc capté par 2 bobines (#20 et #22) de sens opposés équidistantes de la
bobine alimentée, ce qui induit un courant. La présence d’une anode dans une bobine a
pour effet de changer son impédance. La différence de ces 2 courants est transmise à un
capteur, ce qui permet de déduire la conductivité électrique des anodes avant que celles-ci
soient cuites. Un brevet du système de mesures a été accepté, il reste maintenant à
concevoir le prototype et à l’implanter de manière à être capable de faire fonctionner dans
un environnement industriel.

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 2
Figure 1 : Schéma du système permettant de mesurer la conductivité électrique des anodes avant la
cuisson selon le brevet #7576534.
1.2 Présentation synthétique des différentes partie s
Le rapport contient premièrement la présentation du projet qui discute de l’équipe, la
problématique ainsi que les objectifs du projet. Les aspects techniques et les éléments de
conception sont dans la partie suivante. Cette partie contient toutes les étapes nécessaires
à l’implantation du projet. La section suivante traite des bilans des activités du projet.
Finalement, une conclusion et des recommandations sur le projet et la suite seront de
mise.
2. Présentation du projet
2.1 Description de l’entreprise
L’entreprise Hades, en collaboration avec M. Daniel Audet, ont vendu leur brevet à
l’UQAC afin de rendre possibles les tests possibles pour la mise en marché industriel de

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 3
ce produit. Exigeant de grosses sommes d’argent, l’UQAC devra s’affilier avec des
compagnies à l’aise financièrement afin de produire et faire les tests d’un tel système en
usine. La compagnie Hades serait ensuite intéressée de faire la mise en marché de ce
produit dans les usines.
2.2 Description de l’équipe de travail Équipe : Éric Goudreault Superviseur : M. Daniel Audet Spécialiste des équipements Siemens : M. Jimmy Chabot (Siemens) Support technique des équipements Siemens : M. Pascal Lavoie (Franklin empire) Spécialiste du procédé de fabrication des anodes : M. Luc Parent (Hades) Spécialiste des convoyeurs industriel : Groupe Génitique
2.3 Problématique La problématique reliée au présent projet porte sur la conception et la mise en place d’un
instrument de mesure de la conductivité électrique des anodes non cuites sur une chaîne
de production industrielle. Il est déjà possible de mesurer la conductivité électrique des
anodes cuites, mais pas celle des anodes non cuites avec le prototype puisque le signal
généré est beaucoup plus faible. Le milieu de travail est un facteur important pour le
choix des matériaux, le dimensionnement et le choix des pièces. Puisque la manière de
mesurer prend en compte le champ magnétique, il faut évidemment éviter les matériaux
ferromagnétiques à proximité de l’instrument de mesure. La température des
composantes devra être mise à l’étude pour la mesure. La mesure de la conductivité
électrique par induction d’une force électromotrice dans une bobine impose un certain
nombre de contraintes, il est donc clair que cette méthode demande une analyse attentive
de tous les facteurs qui pourraient fausser les mesures. Il est nécessaire de prouver le
principe du système de mesures dans un environnement industriel et avec des anodes non
cuites. Les produits utilisés pour la programmation devront tenir compte des produits déjà
utilisés dans l’usine visée par ce système.
2.4 Objectifs du projet

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 4
Ce projet a pour objectif principal de développer un système de mesures permettant de
mesurer la conductivité électrique d’anodes non cuites dans une chaîne de production
industrielle. Le projet consiste en 3 parties importantes, soit la conception du système de
mesures de la conductivité électrique pour des anodes non cuites, la partie mécanique
pour le fonctionnement du système dans une chaîne de production industrielle et la partie
automatisation et interface homme-machine pour la convivialité de fonctionnement en
usine. Ce système devra permettre la réalisation de tests d’installations ainsi que d’opérer
en continu dans une chaîne de production. Une interface homme-machine, l’acquisition
des données ainsi qu’un protocole de communication simple devront être développés. Le
choix des composantes nécessaires est aussi une étape à réaliser. Un mode étalonnage et
analyse devront être créés afin de permettre les tests en usines.
Vu qu’il n’a pas été possible d’avoir des anodes miniatures en cube, la fabrication d’un
prototype a été annulée puisque ça devenait inutile. N’ayant eu aucune anode non cuite
avec une conductivité électrique connue, il n’a pas été possible de trouver la relation
entre le signal reçu et sa conductivité.
3. Travail réalisé
3.1 Principe de fonctionnement de la sonde
3.1.1 Principe de la bobine d’excitation
Une source de tension variable est commandée par un programme afin d’injecter un
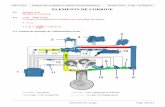
courant de 0,5 A dans la bobine d’excitation. Comme on peut le voir à la figure 2, le
programme lit la tension d’entrée d’une résistance fixe et joue sur la tension de la source
afin de maintenir constante la tension aux bornes de la résistance, ce qui correspond à un
courant de 0,5 A dans le circuit. Sachant que l’impédance maximum de la bobine est de
19Ω, on peut en déduire que la source de tension variable est de 0 à 9,5 V
(V=RI=19Ω*0,5A=9,5V). Pmax= RI2= 19 * 0,52 = 4,75 W. Le condensateur fait un filtre
passe-bande à 980 Hz et permet aussi de mettre le circuit en résonance et d’annuler la
réactance du circuit. De ce fait, le circuit est moins énergivore et permet une source
moins puissante.
Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 5
constantrV =
variablesourceV =
Figure 2: Circuit électrique de la bobine d'excitation
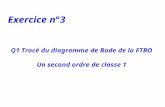
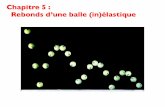
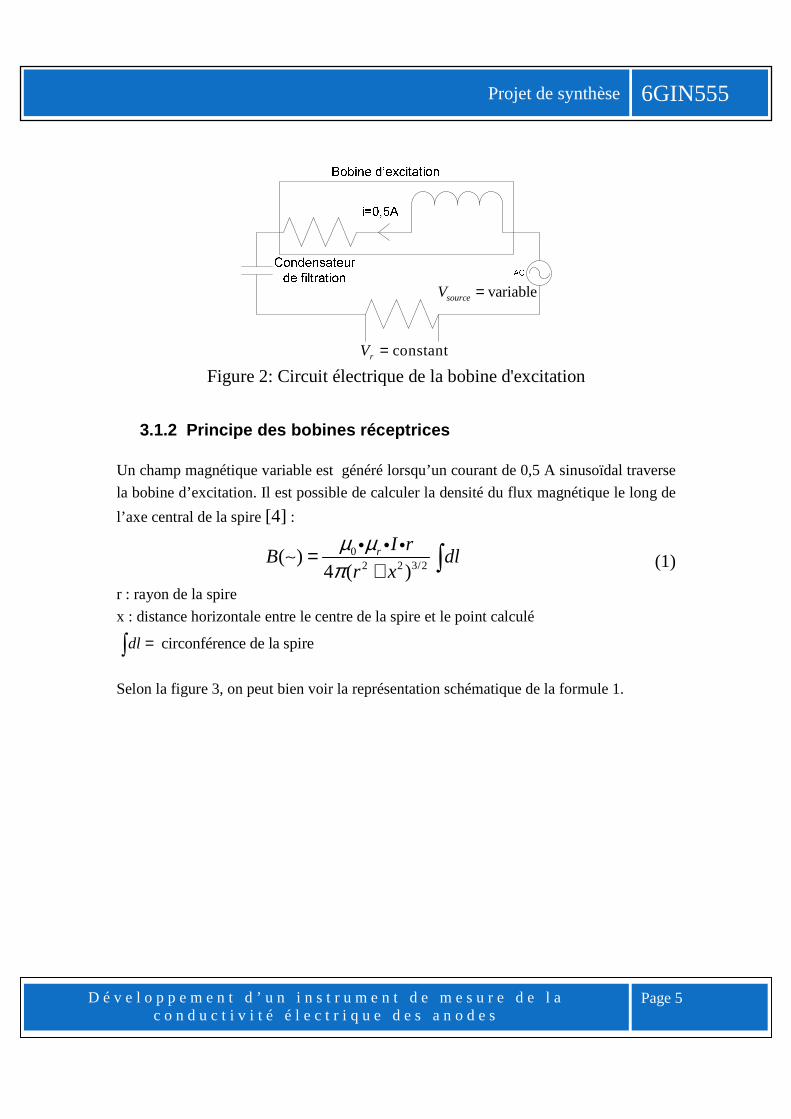
3.1.2 Principe des bobines réceptrices Un champ magnétique variable est généré lorsqu’un courant de 0,5 A sinusoïdal traverse
la bobine d’excitation. Il est possible de calculer la densité du flux magnétique le long de
l’axe central de la spire [4] :
02 2 3/2
( )4 ( )
=+ ∫i i i
∼r I r
B dlr x
µ µπ
(1)
r : rayon de la spire
x : distance horizontale entre le centre de la spire et le point calculé
circonférence de la spire=∫dl
Selon la figure 3, on peut bien voir la représentation schématique de la formule 1.

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 6
Pr
xdli
Figure 3: Représentation schématique de la loi permettant de calculer le champ que créé chaque spire à un point donné Vu que la susceptibilité magnétique (χm) du carbone est de 0,5*10-6 et que les anodes sont
pratiquement faites de carbone, on peut négliger cette susceptibilité et dire que la
perméabilité magnétique des anodes (µr=1+χm) est de 1. Un flux magnétique est ensuite
généré dans les bobines réceptrices
( ) ( )B Sφ =∼ ∼ i (2)
S : surface intérieure de la bobine
Ce flux génère une différence de potentiel aux bornes de la bobine.
sd
Ndtφε =
(3)
Ns : Nombre de spires au secondaire des bobines
Cette différence de potentiel induit un courant dans les bobines.
sbobine
IZ
ε= (4)
Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 7
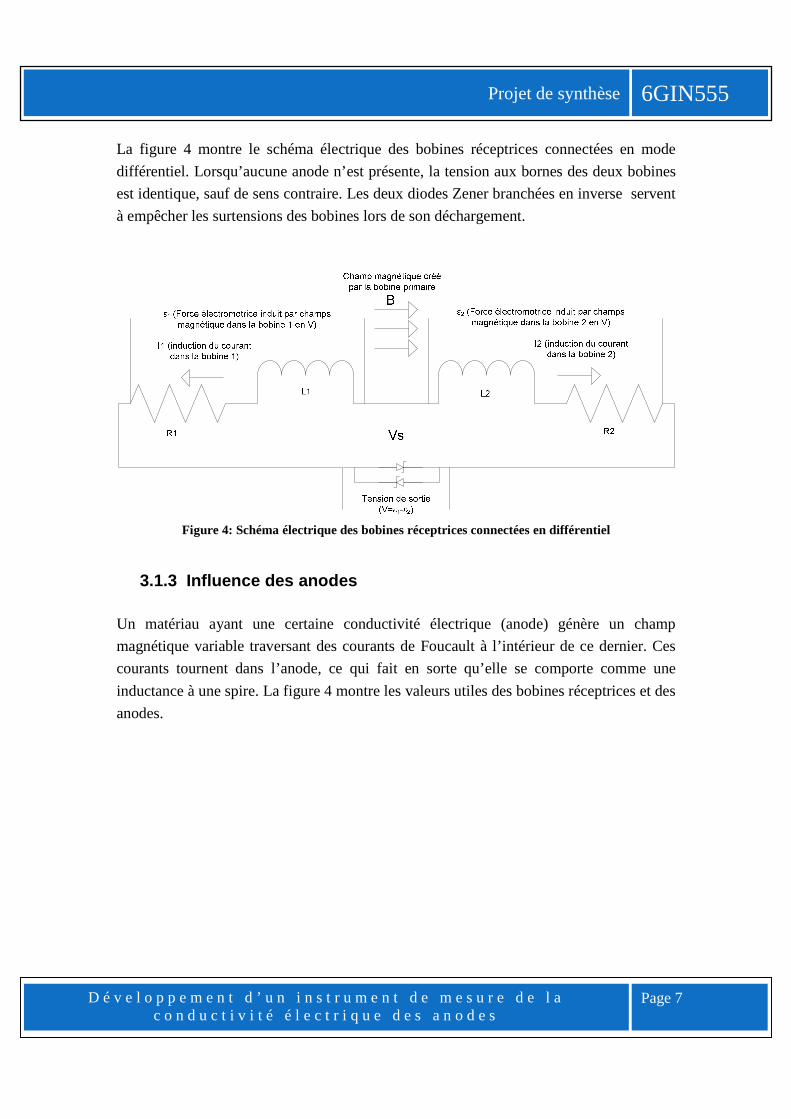
La figure 4 montre le schéma électrique des bobines réceptrices connectées en mode
différentiel. Lorsqu’aucune anode n’est présente, la tension aux bornes des deux bobines
est identique, sauf de sens contraire. Les deux diodes Zener branchées en inverse servent
à empêcher les surtensions des bobines lors de son déchargement.
Figure 4: Schéma électrique des bobines réceptrices connectées en différentiel
3.1.3 Influence des anodes Un matériau ayant une certaine conductivité électrique (anode) génère un champ
magnétique variable traversant des courants de Foucault à l’intérieur de ce dernier. Ces
courants tournent dans l’anode, ce qui fait en sorte qu’elle se comporte comme une
inductance à une spire. La figure 4 montre les valeurs utiles des bobines réceptrices et des
anodes.

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 8
0
0
0
spires
: Résistance bobine
: Inductance bobine
N
R
L
1 spire
: Résistance anode
: Inductance anodea
a
R
L
ai
i
Figure 5: Représentation d'une bobine réceptrice et d'une anode La tension dans une bobine est en fait la force électromotrice vue à l’équation 3. Cette
tension peut s’écrire d’une différente manière. [5]
0 0b aV R i jL i jM iε ω ω= = + + (5)
M : inductance mutuelle entre les bobines secondaires et l’anode
La tension aux bornes de l’anode est nulle puisqu’il forme une boucle fermée.
0= = + +a a a a aV R i jL i jM iω ω (6)
De façon générale, l’inductance d’une bobine est égale à2
0
1= i iN SL
Lµ , donc d’après
cette formule et la figure 5, on tire : 2
0 00 0_ _ _ 0 0
1 11; ;= = =i i i ii
a bobine sans noyau
N S N SSL L M
L L Lµ µ µ (7)
S : surface de l’anode
L : longueur de l’anode
L’inductance des anodes sera identique dans une même usine puisque leur dimension et
leur perméabilité magnétique sont analogues. Pour ce qui est des inductances des bobines
réceptrices, il sera primordial qu’ils aient les mêmes caractéristiques. Un noyau fait

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 9
changer l’inductance d’une bobine à cause de sa perméabilité magnétique (µr). Dans notre
cas, µr=1, donc l’inductance restera constante peu importe les positions des anodes. De
l’équation 6, on en déduit que les courants de Foucault dans l’anode sont :
aa a
M ii j
R jL
ωω
= −+ (8)
En remplaçant l’équation 8 dans l’équation 5, on peut obtenir la force électromotrice et
l’impédance de la bobine ayant l’influence d’une anode comme noyau à l’équation 9 et
10. 2 2 2 3
0 02 2 2 2 2 2a a
ba a a a
R M L MZ R j L
R L R L
ω ωωω ω
= + + − + + (9)
2 2 2 3
_ 0 02 2 2 2 2 2
= = + + − + + a a a a
a abobine récep b
R M L MV i R j L
R L R L
ω ωε ωω ω
(10)
La fréquence restant fixe, la seule valeur changeant l’inductance de la bobine est la
résistance de l’anode qui est directement reliée à la conductivité de celle-ci et
l’emplacement de l’anode qui fait varier l’inductance mutuelle «M». Ainsi, pour un
matériau ayant une résistance élevée, la partie réelle est beaucoup plus affectée par la
résistance de l’anode que la partie imaginaire. C’est pourquoi la partie réelle de la tension
mesurée de la sonde sera utile afin d’y trouver une correspondance avec la conductivité
électrique. La partie imaginaire, quant à elle, est plus affectée par l’inductance de l’anode
que la résistance.

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 10
Anode au travers de la bobine réceptrice de gauche Lorsque l’anode est entre la bobine 1 de la figure 4 du secondaire, l’inductance mutuelle
est au maximum. Le courant traversant la résistance de mesure est donc :
( ) ( )
( ) ( )
2 2 2 3max max
1 0 02 2 2 2 2 2
1 1_ max 1_ max
2 2 2 3min min
2 0 02 2 2 2 2 2
2 2 _ min 2_ min
= + + − + +
= +
= + + − + +
= +
a abobine
a a a a
bobine
a abobine
a a a a
bobine
R M L MZ R j L
R L R L
Z R j X
R M L MZ R j L
R L R L
Z R j X
ω ωωω ω
ω ωωω ω
Pour mieux visualiser, la tension de sortie calculée sera:
_ _1 _ _ 2= −sortie bobine récep bobine récepV ε ε
Considérant que 2 min 0= ≈bobM M (inductance mutuelle entre la bobine de droite et l’anode) :
( )( )2 2 2 3
_1 0_ 1 0_ 1 _ 2 0_ 2 0_ 22 2 2 2 2 2
0_ 1 0_ 2
0_ 1 0 _ 2
_1 _ 2
= + + − − + + +
=
=
= =
a a a a
a asortie bob bob bob bob bob bob
bob bob
bob bob
bob bob
R M L MV i R j L i R j L
R L R L
R R
L L
i i i
ω ωω ωω ω
2 2 2 3
2 2 2 2 2 2
= + − + + a a a a
a asortie
R M L MV i j
R L R L
ω ωω ω
(11)
Anode au travers de la bobine réceptrice de droite Calculé de manière analogue au cas précédant :
2 2 2 3
2 2 2 2 2 2
= − + + + a a a a
a asortie
R M L MV i j
R L R L
ω ωω ω
(12)
Anode au travers de la bobine émettrice

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 11
0≈sortieV (13)
Il est intéressant de remarquer que le signal réel et imaginaire du signal est stimulé de la
même façon par rapport à l’inductance mutuelle. Mais la valeur de la conductivité
électrique et l’inductance de l’anode font en sorte que les signaux réels et imaginaires
vont être affectés à des échelles différentes.
3.1.4 Familiarisation avec le programme de monitori ng Un programme permettant de visualiser les données reçues de la sonde à l’ordinateur a
été créé. Ce système permet de faire des tests et de visualiser les résultats facilement via
le port série de l’ordinateur.
C’est un programme principal (main.c) qui appelle plusieurs sous-programmes qui à leur
tour appellent d’autres sous-programmes. Le programme initialise les ports de la sonde et
regarde si le minimum et le maximum des sondes sont configurés. Il va ensuite chercher
les valeurs prédéfinies du courant dans la bobine primaire (CURRENT_LEVEL), de la
fréquence de la source (DEF_CONS_FREQ) et du gain sur la tension de
sortie(DEF_GAINS) dans la mémoire EEPROM. Il s’agira de changer ces valeurs afin de
correspondre aux exigences du nouveau prototype. Le programme envoie ensuite un
courant à une fréquence donnée à la bobine du primaire deux fois par seconde. Il définit
l’amplitude à la sortie désirée. Le reste du programme reçoit les données, les traite et les
envoie à l’ordinateur. Il fait une correction en fonction de la température. Le prototype
initial ne contenait qu’une bobine réceptrice contrairement au nouveau qui en contient
deux branchés en différentiel. La correction due à la température devra être modifiée
puisque le fait de connecter deux bobines en différentiel permettra de négliger les effets
de la température des bobines réceptrices puisqu’ils seront toujours d’impédance égale. Il
restera à prendre la température de la résistance de sortie et de l’anode afin de les prendre
en considération pour l’algorithme de calcul. Un programme permet déjà d’acquérir les
données sur un ordinateur via le port série de l’ordinateur.

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 12
Figure 6: Programme de visualisation des données de la sonde en temps réel sur ordinateur via port
série RS-232
3.2 Conception de la mesure de la conductivité élec trique
3.2.1 Contraintes de réalisation
3.2.1.1 Fréquence de fonctionnement
La source intégrée à la sonde qui alimente la bobine émettrice fonctionne à 980 Hz. La
profondeur de pénétration où le champ magnétique produit la majeure partie de ses effets
est définie par la formule suivante.
76
2 211.92
12 980 1 4
55−
−
= = =i i i i
cme
e
δωµσ π π
[1] (14)
0 =perméabilité magnétique du matériau et de l'air
1/ conductivité électrique de l'anode (pris une valeur moyenne)
= ⋅= =
rµ µ µσ ρ
Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 13
On peut réaliser que la conductivité est inversement proportionnelle au carré de la
profondeur de pénétration. Il en va de même pour la fréquence. La profondeur calculée
est suffisante pour le passage des courants de Foucault et donc l’analyse de la
conductivité électrique des anodes.
3.2.1.2 Facteur de sécurité relié au champ magnétique des bobines
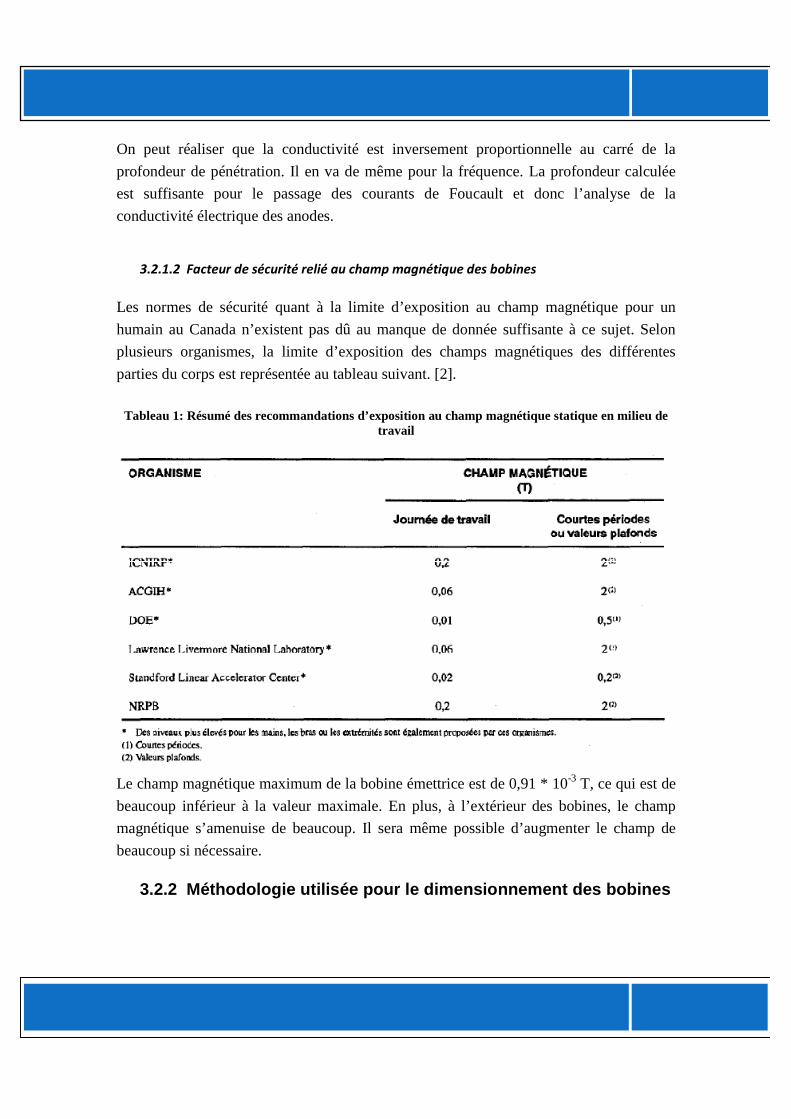
Les normes de sécurité quant à la limite d’exposition au champ magnétique pour un
humain au Canada n’existent pas dû au manque de donnée suffisante à ce sujet. Selon
plusieurs organismes, la limite d’exposition des champs magnétiques des différentes
parties du corps est représentée au tableau suivant. [2].
Tableau 1: Résumé des recommandations d’exposition au champ magnétique statique en milieu de
travail
Le champ magnétique maximum de la bobine émettrice est de 0,91 * 10-3 T, ce qui est de
beaucoup inférieur à la valeur maximale. En plus, à l’extérieur des bobines, le champ
magnétique s’amenuise de beaucoup. Il sera même possible d’augmenter le champ de
beaucoup si nécessaire.
3.2.2 Méthodologie utilisée pour le dimensionnement des bobines

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 14
Le courant dans la bobine primaire étant assez faible (0,5 A), le nombre de tours devra
être assez important afin d’avoir un champ magnétique suffisamment élevé sans dépasser
les normes précisées précédemment. Plus le champ magnétique sera élevé, plus la tension
de sortie sera sensible aux passages de l’anode et donc plus les données reçues seront
précises. Le but de la bobine primaire est de générer un champ magnétique élevé, mais
aussi un champ magnétique qui pourra être induit le plus possible dans les bobines
réceptrices.
En plus, afin de garder la source existante de la sonde, il ne faut pas dépasser une
impédance de 19 Ω. En montant un circuit résonant, on a plus qu’à s’occuper de la
résistance du fil de la bobine puisque la réactance du condensateur annule la réactance de
la bobine.
Afin que le système soit capable de mesurer la conductivité électrique des anodes non
cuites, il est nécessaire que la différence de force électromotrice entre la valeur maximale
et minimale soit beaucoup plus grande sur le prototype industriel que sur le prototype
miniature. D’après les figures 12 et 14, le signal reçu avec le passage d’une anode cuite
est environ 100 fois plus élevé qu’avec le passage d’une anode non cuite. Pour ce faire, il
faut que le courant dans la bobine réceptrice et l’inductance mutuelle soit au moins égal.
Le courant est fonction de la force électromotrice et l’impédance de la bobine réceptrice
comme montré à l’équation 4. Le calcul l’inductance théorique de bobines avec ce genre
de géométrie étant difficile, on s’occupera d’avoir une tension induite la plus élevée
possible aux bornes des bobines. Plus la tension sera élevée, plus la différence de la
tension réelle sera élevée lorsqu’une anode sera présente au travers d’une bobine
réceptrice. L’inductance mutuelle, comme à l’équation 7, est dépendante du nombre de
spires de la bobine, de la surface de l’anode et de la longueur de la bobine. Des calculs
seront donc faits à partir du prototype miniature afin de dimensionner le prototype
industriel.
Pour ce faire, il sera de mise de calculer la densité de flux du prototype qui est créé par la
bobine émettrice au point milieu des bobines réceptrices à l’aide de l’équation 1 et d’en
déduire le flux induit dans les bobines réceptrices.
Il sera ensuite nécessaire d’utiliser Matlab afin de vérifier les calculs théoriques et
d’optimiser le flux. En choisissant la grosseur de fil, la largeur de la bobine et la distance

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 15
entre le milieu de la bobine émettrice et réceptrice, il sera possible d’avoir le nombre de
spires, l’impédance de la bobine et la densité de flux que la bobine aura. Les résultats
obtenus seront normalement fiables, mais pas parfaitement exacts. C’est pourquoi un
système de bobines enfichables sera nécessaire afin d’enlever ou d’ajouter des spires à la
bobine. Il sera peut-être aussi nécessaire de mettre plusieurs bobines en parallèle afin de
diminuer l’impédance.
3.2.3 Calcul des valeurs importantes du prototype m iniature
Densité de flux magnétique du prototype miniature :
Pour le rayon, les formules pour calculer la densité de flux sont toutes par rapport à une
bobine circulaire. Vu que les bobines sont rectangulaires, l’aire a été pris en considération
afin de calculer un rayon correspondant à une bobine circulaire[4] . Ce rayon devrait
donner des résultats plus concluants que prendre le rayon maximum du rectangle (Forme
des bobines).
0.106 .060.045
⋅≈ = =aire m mr m
π π
02 2 3/2
76
1_ 2 2 3/2
6 4_ 1_
( )4 ( )
4 0.5 0.045( ) (.332 ) 3.3
4 (0.045 0.04 )
( ) ( ) 253 3.3 8.52
−−
− −
=+
= =+
= = =
∫i i
∼
i i i
∼ i
∼ i ∼ i
proto
spire
tot proto proto spire
I rB dl
r x
eB m e T
B N B e T e T
µπ
ππ
Flux magnétique du prototype miniature :
3 2
4 3 2 6
0.106 0.06 6.36
( ) ( ) 8.52 6.36 5.39
−
− − −
= == = =i
∼ ∼ i iproto
S m m e m
B S e T e m e Wbφ
Impédance des bobines réceptrices :

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 16
24.25= ΩbobineZ
Force électromotrice dans les bobines réceptrices :
6 35.59 3,354
600 (donc valeur max)(1/ 2 ) (1/ 2 )
− −
= = =ise Wb e V
cycle cycle
dN
dtε φ
Inductance mutuelle maximum du prototype miniature entre l’anode et les bobines réceptrices:
0 0_
76
_
0,05 0,1 0,005
0,05
4 10 600 0,00575,4
0,05
⇒
−−
⇒
=
= ==
= =
i i
i
i i i
anode bobine réceptrice
anode
anode
anode bobine réceptrice
N SM
LS m
L m
eM e
µ
π
L=longueur effective du noyau N0=nombre de spires des bobines réceptrices S=section effective du noyau Selon la formule 8 décrite plus haut, l’anode fait changer l’impédance de la bobine réceptrice où l’anode se situe. La fréquence reste identique dans les 2 cas. Donc, la différence d’impédance réelle est :
2 2
_ 2 2 2⇒ =+
a a
aanode bob réceptrice
R MR
R L
ωω
L’impédance de la bobine émettrice doit être plus petite ou égale à 19 Ω.
Avec Matlab, les calculs prennent en compte le rayon, la distance et la résistance qui
change selon la position de chaque spire et les valeurs obtenues ressemblent beaucoup à
celle approximée en théorie, mais sont en principe plus fiables. La simulation a donné les
résultats suivants :
Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 17
4_ 1_
6_
_ _
( ) ( ) 8,79
( ) ( ) 5,59
24,25
−
−
= =
= =
= Ω
∼ i ∼
∼ ∼ i
tot matlab proto spire
proto matlab
proto bobine récept
B N B e T
B S e Wb
Z
φ
Les valeurs de «M» et de «I» seront prises de ceux de la théorie puisque le calcul sur
Matlab est inutile.
3.2.4 Calcul du prototype industriel Approximation de la densité de flux magnétique du prototype industriel :
_ min
78
1_ 2 2 3/2
8_
( )
1.016 1.24460.6344
4 0.5 0.6344( ) (4.5212 ) 21.054
4 (0.6344 0.6096 )
( ) 432 21.054 90.95
−−
−
≥
⋅≈ = =
= =+
= =
∼
i i i
∼ i
∼ i
grandeur nature iature
spire
grandeur nature
B B
aire m mr m
e A mB m e T
B e T T
π ππ
πµ
Flux magnétique du prototype industriel induit aux bobines secondaires:
2
2
1.016 1.2446 1.2645
( ) ( ) 90.95 1.2645 115.01
= =
= = =
i
∼ ∼ i i
bobine
proto
S m m m
B S T m Wbφ µ µ
On peut remarquer que la surface des bobines réceptrices fait augmenter de beaucoup le
flux induit.
Longueur totale du câble :
câble
4.5212ml 432spires 1953.15m
spire= =i
Poids total du câble
câblePoids 1953.15m 0.02947kg / m 57.56kg= =i
Impédance des bobines réceptrices :

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 18
-3432 4,5215 5.20864e / 10.17= Ω = Ωi ibobineZ spires m m
Cette valeur d’impédance est correcte puisqu’elle permet de rajouter du bobinage en cas de besoin. La source limite l’impédance à 19 Ω, donc un peut rajouter quasiment le double de bobinage en cas de besoin.
Avec Matlab :
6
_ 1_
6_ _
_ _ _ _
_
_
( ) ( ) 91.592
( ) ( ) 110.62
10.27
1971
58.07
−
−
= =
= =
= Ω
=
=
∼ i ∼
∼ ∼ i
tot matlab proto spire
grandeur nature matlab
grandeur nature bobine récept matlab
câble matlab
câble matlab
B N B e T
B S e Wb
Z
l m
Poids kg
φ
Force électromotrice des bobines réceptrices : D’après les courbes plus basses
6 3110.62 132.75
1200 (donc valeur max)(1/ 2 ) (1/ 2 )
− −
= = =ise Wb e V
cycle cycle
dN
dtε φ
Inductance mutuelle du prototype industriel entre l’anode et les bobines réceptrices :
0 0_
2
76
_
0,6096 0,5334 0,3252
1,524
4 10 1200 0,3252321.78
1,524
⇒
−−
⇒
=
= ==
= =
i i
i
i i i
anode bobine réceptrice
anode
anode
anode bobine réceptrice
N SM
L
S m m m
L m
eM e
µ
π
3.2.5 Résultat de la bobine émettrice La bobine émettrice aura donc 432 tours de câble AWG12. Les bobines trouvées
d’AWG12 se vendent avec des longueurs totalisant 169 m. Il faudra donc connecter 12
Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 19
bobines en série de 36 tours (6X6). Chaque bobine nécessitera environ 163m de fil
(4.5212m *36 tours). La longueur sera de 0,5 pouce. Il faudra donc 12 bobines
d’AWG12.
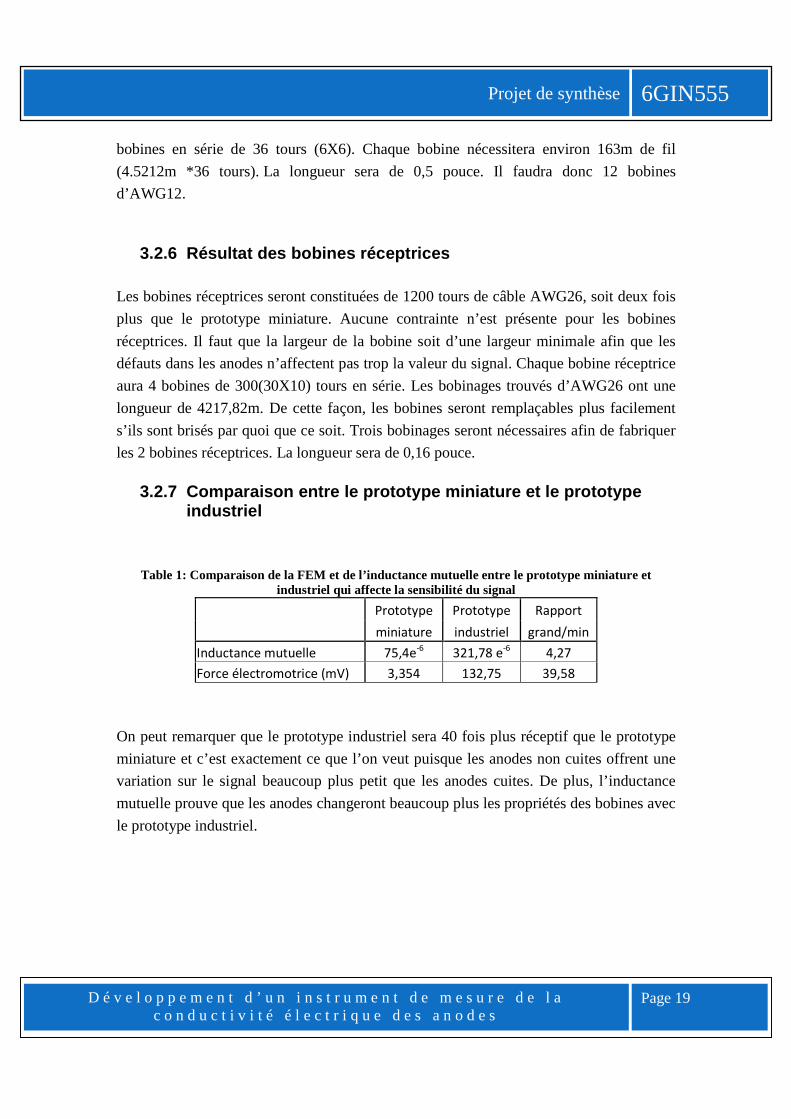
3.2.6 Résultat des bobines réceptrices Les bobines réceptrices seront constituées de 1200 tours de câble AWG26, soit deux fois
plus que le prototype miniature. Aucune contrainte n’est présente pour les bobines
réceptrices. Il faut que la largeur de la bobine soit d’une largeur minimale afin que les
défauts dans les anodes n’affectent pas trop la valeur du signal. Chaque bobine réceptrice
aura 4 bobines de 300(30X10) tours en série. Les bobinages trouvés d’AWG26 ont une
longueur de 4217,82m. De cette façon, les bobines seront remplaçables plus facilement
s’ils sont brisés par quoi que ce soit. Trois bobinages seront nécessaires afin de fabriquer
les 2 bobines réceptrices. La longueur sera de 0,16 pouce.
3.2.7 Comparaison entre le prototype miniature et l e prototype industriel
Table 1: Comparaison de la FEM et de l’inductance mutuelle entre le prototype miniature et industriel qui affecte la sensibilité du signal
Prototype Prototype Rapport
miniature industriel grand/min
Inductance mutuelle 75,4e-6
321,78 e-6
4,27
Force électromotrice (mV) 3,354 132,75 39,58
On peut remarquer que le prototype industriel sera 40 fois plus réceptif que le prototype
miniature et c’est exactement ce que l’on veut puisque les anodes non cuites offrent une
variation sur le signal beaucoup plus petit que les anodes cuites. De plus, l’inductance
mutuelle prouve que les anodes changeront beaucoup plus les propriétés des bobines avec
le prototype industriel.

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 20
3.2.8 Conception du circuit émetteur
Le circuit émetteur sera identique à la figure 2. Afin d’annuler la réactance de la bobine
afin de diminuer l’impédance au maximum, l’ajout d’un condensateur de résonance sera
de mise. Il faudra donc utiliser les calculs suivants afin de mettre le circuit en résonance à
980 Hz :
0
0
20 _
980
1
1
=
=
=⋅compensation
bobine émettrice
F Hz
FLC
CF L
L’inductance de la bobine réceptrice devra être mesurée après sa confection afin de
trouver le condensateur à mettre puisque la géométrie des bobines rend le calcul de son
inductance impossible.
3.2.9 Conception du circuit récepteur
Le montage sera deux bobines branchées en différentiel comme le montre la figure 4. Les
deux diodes Zener connectées en inverse empêchent les surtensions et déchargent
l’énergie dans les bobines. Ayant un courant très faible, les diodes Zener choisies
n’auront pas une grande puissance à décharger. Les diodes «2EZ11D5» de la compagnie
MCC empêchent une tension de 11 V comme sur le prototype et permettent de décharger
2W, qui sont amplement suffisants pour les petits courants parcourus dans les bobines
réceptrices.
3.2.10 Conception des bobines enfichables Le principe des bobines secondaires est assez simple, il faudra mettre au moins autant de
spires que celui du prototype miniature afin d’avoir une précision semblable, mais
seulement les tests sur le terrain prouveront le nombre de spires nécessaire pour
l’optimisation du signal. C’est pourquoi l’idée de confectionner des bobines assez minces
qui pourront s’enficher l’une dans l’autre afin d’additionner leur nombre de spires si

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 21
nécessaire comme le montre la figure ici-bas. N’ayant pas trouvé de bobines assez
longues à commander pour fabriquer les 2 bobines réceptrices et la bobine émettrice, il
est nécessaire d’avoir un système de bobines enfichables. L’ajout, la réduction et la
réparation des bobines seront possibles avec cette méthode de fabrication.
Figure 7 : Bobines secondaires enfichables une dans l'autre
3.3 Conception et installation des bobines La fabrication des trois bobines devra être réalisée de manière minutieuse afin d’avoir
une tension de sortie nulle lorsqu’aucune anode ne sera présente. Ceci implique que les
bobines réceptrices aient les mêmes caractéristiques. La distance prévue entre les 2
bobines secondaires est la longueur d’une anode. La longueur des anodes diffère d’une
Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 22
usine à l’autre, la longueur choisie sera de 5 pieds puisque c’est environ la longueur la
plus longue rencontrée.
3.4 Composantes mécaniques
La partie mécanique a montré que c’est réalisable. Tous les détails de cette partie ne sont
qu’une suggestion et devront être vérifiés quand même.
3.4.1 Manutention des anodes
Contraintes
Les anodes pèsent environ de tonne. La dimension des anodes diffère d’une usine à
l’autre. La dimension choisie à partir d’informations et de photos est de 5 pieds de long, 2
pieds de large et de 1,75 pied de haut. Ces dimensions sont un peu plus élevées que la
moyenne pour assurer que le dimensionnement des bobines soit suffisamment grand pour
accommoder plusieurs usines. Le transport des anodes durant son passage dans la sonde
ne devra contenir aucun matériel ferromagnétique afin de ne pas fausser les données.
Méthodologie choisie
Le convoyeur ci-dessous est un convoyeur non métallique pouvant supporter le poids des
anodes. La largeur du convoyeur sera de 4 pieds pour laisser un jeu de 1 pied de chaque
côté entre l’anode et les supports des bobines du convoyeur. Ces convoyeurs sont conçus
pour absorber les vibrations, ce qui est bien pour la sonde. Sa longueur devrait être
d’environ 2 fois la longueur d’une anode pour empêcher les matériaux du convoyeur
standard de fausser les données de la sonde, soit de 10 pieds.

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 23
Figure 8: Convoyeur à rouleau non métallique «NMR-6689» de la compagnie «Globe Composite
Solutions Ltd.» Source:http://www.globecomposite.com/files/Non-metallic_Roller_Brochure_Pictures.pdf
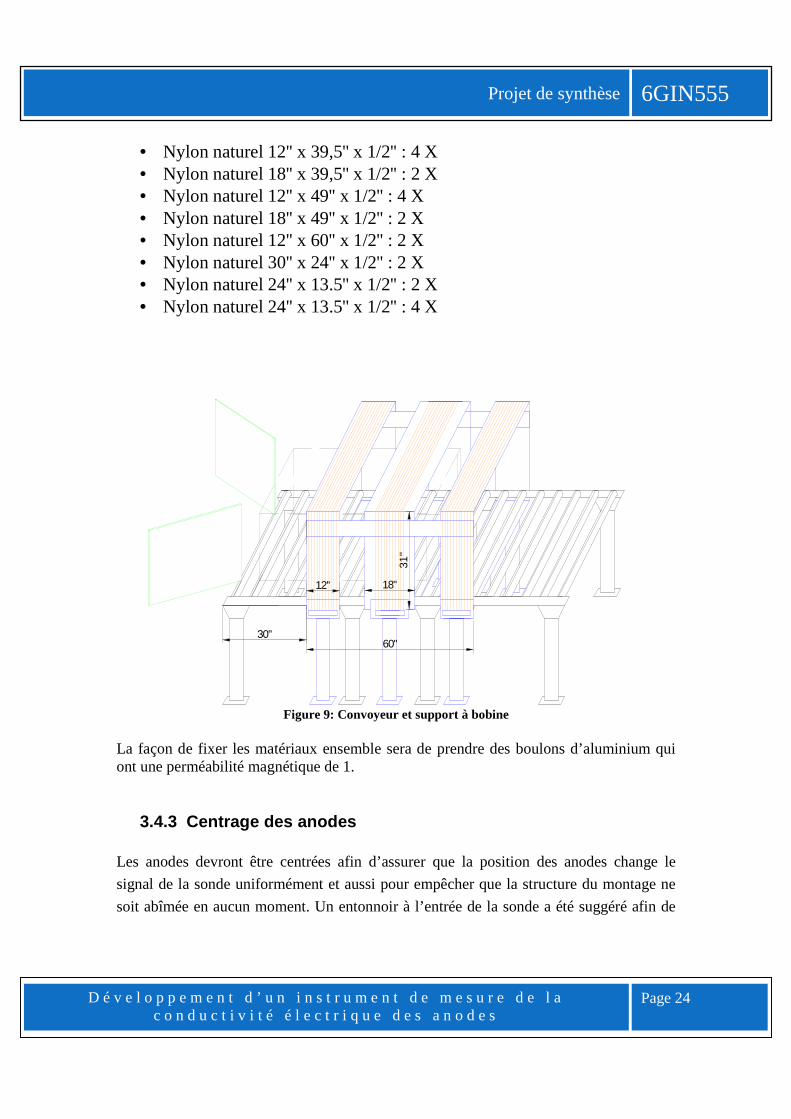
3.4.2 Conception des supports complets des bobines Les supports des bobines devront être fixés ensemble afin qu’ils soient perturbés de la
même manière. Les attaches seront fixées directement sur le béton afin d’empêcher toutes
vibrations même si le convoyeur est spécialement conçu pour enlever le plus possible
toutes les vibrations. Un croquis de la structure du montage en bleu et du convoyeur en
noir est présenté plus bas à la figure 8. Les bobines seront bobinées autour des 3 supports
en bleu. Le matériel utilisé sera du nylon naturel de 1/2 de pouces d’épais puisqu’il offre
une solidité plus qu’acceptable à bon marché et que c’est un matériau non
ferromagnétique. Il n’aura donc aucune influence sur le signal de la sonde. Sachant que la
bobine primaire doit être plus large afin d’uniformiser le champ magnétique, le support à
bobine du centre sera de 18 pouces de large et le support des bobines secondaires sera de
12 pouces. En laissant des trous, la réparation ou la maintenance sera beaucoup plus
facile. Deux morceaux fixeront tous les supports afin qu’ils réagissent de la même façon
aux perturbations externes (vibration, etc.). La liste de matériaux se limite à des
morceaux de nylon naturel qu’on peut visualiser sur la figure 7 et 8 :
Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 24
• Nylon naturel 12'' x 39,5'' x 1/2'' : 4 X • Nylon naturel 18'' x 39,5'' x 1/2'' : 2 X • Nylon naturel 12'' x 49'' x 1/2'' : 4 X • Nylon naturel 18'' x 49'' x 1/2'' : 2 X • Nylon naturel 12'' x 60'' x 1/2'' : 2 X • Nylon naturel 30'' x 24'' x 1/2'' : 2 X • Nylon naturel 24'' x 13.5'' x 1/2'' : 2 X • Nylon naturel 24'' x 13.5'' x 1/2'' : 4 X
60''30''
18''12''
31''
Figure 9: Convoyeur et support à bobine
La façon de fixer les matériaux ensemble sera de prendre des boulons d’aluminium qui ont une perméabilité magnétique de 1.
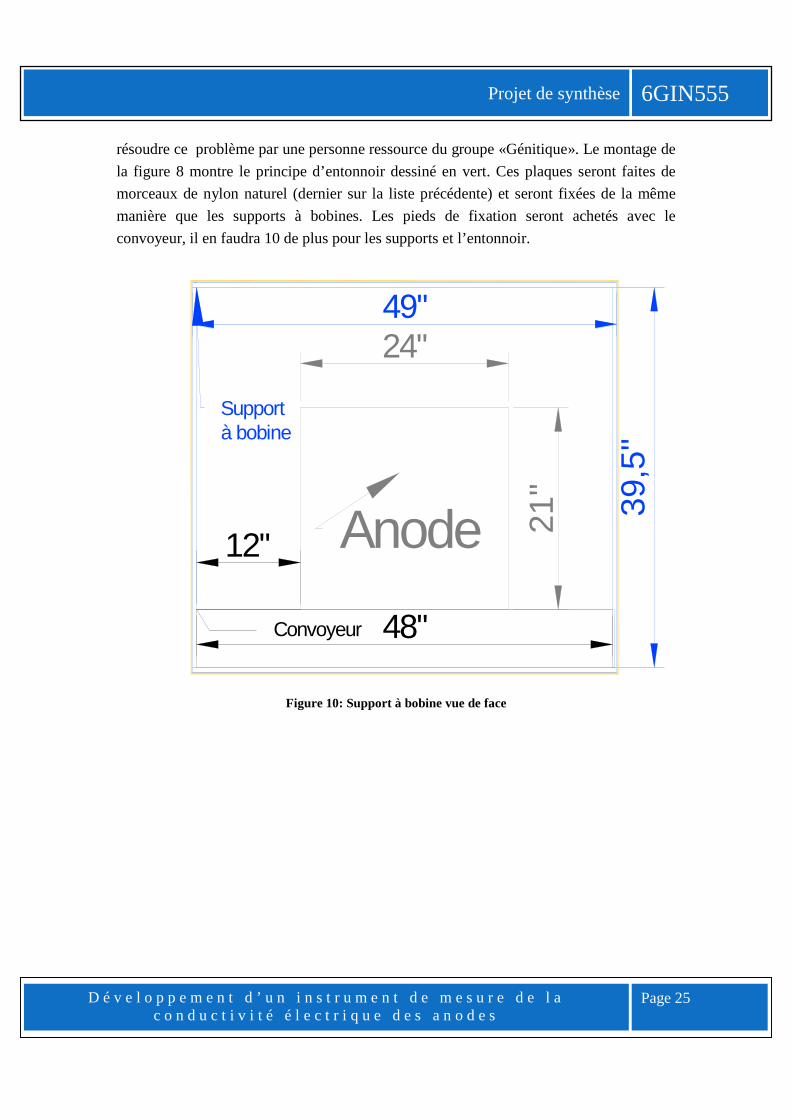
3.4.3 Centrage des anodes Les anodes devront être centrées afin d’assurer que la position des anodes change le
signal de la sonde uniformément et aussi pour empêcher que la structure du montage ne
soit abîmée en aucun moment. Un entonnoir à l’entrée de la sonde a été suggéré afin de
Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 25
résoudre ce problème par une personne ressource du groupe «Génitique». Le montage de
la figure 8 montre le principe d’entonnoir dessiné en vert. Ces plaques seront faites de
morceaux de nylon naturel (dernier sur la liste précédente) et seront fixées de la même
manière que les supports à bobines. Les pieds de fixation seront achetés avec le
convoyeur, il en faudra 10 de plus pour les supports et l’entonnoir.
21''
24''
12''
39,5
''48''
Anode
Supportà bobine
Convoyeur
49''
Figure 10: Support à bobine vue de face

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 26
3.5 Automatisation
3.5.1 Matériel nécessaire • Processeur Siemens «CPU315-2DP» 1* 6ES7315-2AG10-0AB0 • Carte mémoire micro 2 Mb 1* 6ES7953-8LL11-0AA0 • CP-340 communication série RS232C 1* 6ES7340-1AH02-0AE0 • Carte d’entrée digitale (16DI, 24VCC, S7-300) 1* 6ES7321-1BL00-0AA0 • Carte de sortie digitale (32DO, 24VCC) 1* 6ES7322-1BL00-0AA0 • Connexion frontale 40 PIN 3* 6ES7392-1AM00-0AA0 • PS PS-307 (120-230AC, 24CC, 5A) 1* 6ES7307-1EA00-0AA0 • Rail de montage 530 mm 1* 6ES7390-1AF30-0AA0 • Écran tactile 10 pouces MP277 1* 6AV6652-3PB01-DAA0 • Connecteur Profibus 1* 6GK1500-0EA02 • Connecteur Profibus 90 degré 1* 6ES7972-0BA12-0XA0 • Interrupteurs de position 2* 3SE5000-0AE10-1AJ0 • Boitier pour automate • Boitier pour sonde
3.5.1.1 Processeur de l’automate
Le processeur utilisé a été un «CPU315-2DP». Plusieurs facteurs ont décidé du choix de
ce processeur. Premièrement, l’usine visée possède des processeurs de ce genre. Il
contient aussi le protocole de communication «Profibus» qui est aussi présent dans ce
secteur d’usine. Les autres processeurs Siemens ne contenaient soit pas de protocole de
communication intégrée ou soit il n’était pas présent dans les usines visées.
3.5.1.2 Protocole de communication avec usine
Le processeur «CPU315-2DP» contient le protocole de communication «Profibus DP».
Ce protocole de communication est présent dans le secteur de fabrication chez ‘Alouette’
selon une personne ressource de chez «Génitique» et une autre de chez ‘Franklin
Empire’.
Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 27
3.5.1.3 Écran tactile
L’écran tactile «MP277» est compatible avec les automates S7 via le protocole de
communication «Profinet»(Ethernet).
3.5.1.4 Acquisition des données de la sonde par l’automate
La sonde devra être reconfigurée afin qu’elle envoie le bon signal à l’automate. La sonde
a un signal de sortie analogique de 4 à 20 mA et un signal de sortie numérique. La sortie
analogique n’étant pas assez précise, il faut utiliser le port RS-232 afin de transmettre le
signal numérique. Le choix de l’automate dépend des automates et des protocoles de
communication présents dans les usines visées. Un grand nombre d’usines utilisent des
automates S7-300 et des PC-S7 de Siemens et leur protocole de communication est
surtout Profibus dans le centre de production des anodes. Cette information provient d’un
technicien (groupe «Génitique») et d’un fournisseur (Franklin empire) faisant affaire avec
ces usines. Un logiciel de visualisation des données du port RS-232 de la sonde est déjà
créé, il restera à faire l’analyse des données reçues.
La carte CP-340 sert à communiquer entre un automate et un appareil avec une interface
RS232C. L'interface RS232C est une interface tension servant à la transmission de
données en série selon la norme RS232C.
http://support.automation.siemens.com/WW/llisapi.dll/csfetch/1137332/HB_CP340_c.pdf?func=cslib.csFetch&nodeid=1261015&forcedownload=true [3].
3.5.2 Relations et facteurs importants à considérer pour la programmation de l’automate
3.5.2.1 Relation entre le signal réel de la conductivité électrique entre une anode non
cuite et cuite
La conductivité électrique des anodes cuites est beaucoup plus élevée que celle non cuite.
Le prototype prendra la mesure sur des anodes non cuites, il faudra donc trouver une
relation entre la conductivité électrique d’une anode cuite et non cuite lorsque ce sera
Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 28
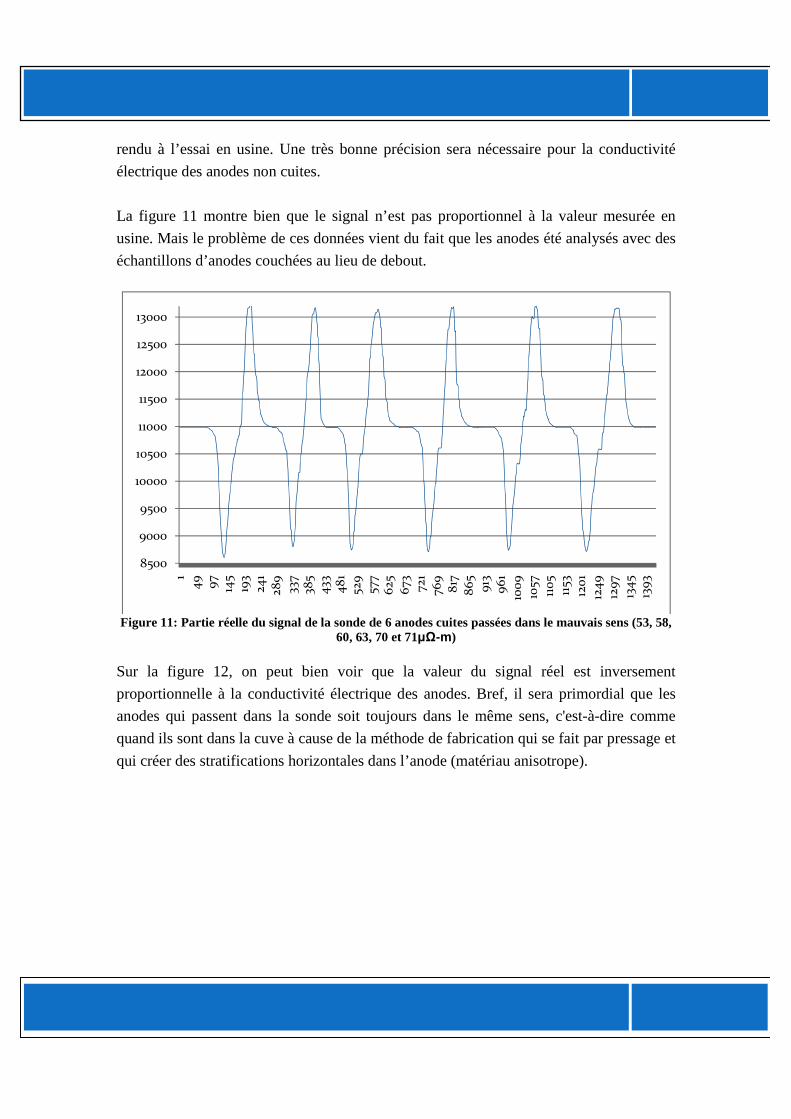
rendu à l’essai en usine. Une très bonne précision sera nécessaire pour la conductivité
électrique des anodes non cuites.
La figure 11 montre bien que le signal n’est pas proportionnel à la valeur mesurée en
usine. Mais le problème de ces données vient du fait que les anodes été analysés avec des
échantillons d’anodes couchées au lieu de debout.
Figure 11: Partie réelle du signal de la sonde de 6 anodes cuites passées dans le mauvais sens (53, 58,
60, 63, 70 et 71µΩ-m) Sur la figure 12, on peut bien voir que la valeur du signal réel est inversement
proportionnelle à la conductivité électrique des anodes. Bref, il sera primordial que les
anodes qui passent dans la sonde soit toujours dans le même sens, c'est-à-dire comme
quand ils sont dans la cuve à cause de la méthode de fabrication qui se fait par pressage et
qui créer des stratifications horizontales dans l’anode (matériau anisotrope).
8500
9000
9500
10000
10500
11000
11500
12000
12500
13000
149 97 14
519
324
128
933
738
543
348
152
957
762
567
372
176
981
786
591
396
110
0910
5711
05 1153
1201
1249
1297
1345
1393

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 29
Figure 12:Valeur du signal réel de 6 anodes cuites passées debout à travers la sonde
Sur le graphique de la figure 13, on peut voir l’équation reliant la valeur du signal en
fonction de la conductivité électrique. La figure 13 montre bien que la conductivité
électrique est inversement proportionnelle au signal reçu, ce qui prouve qu’un mode
étalonnage avec 2 anodes sera possible afin de créer l’équation. Il s’agira de faire la
même chose pour les tests en usine avec les anodes non cuites pour en déduire la
conductivité électrique.
0
2000
4000
6000
8000
10000
12000
14000
0,47
11,2
822
,09
32,9
43,7
154
,52
65,3
376
,14
86,9
597
,76
108,
5711
9,38
130,
19 141
151,
8116
2,62
173,
4318
4,24
195,
0520
5,86
216,
6722
7,48
238,
2924
9,1
259,
9127
0,72
281,
5329
2,34
303,
1531
3,96
324,
77
Valeur réelle du signal 16 bits de 6 anodes non cuites de 53,58,60,63,X et 71 µΩ-m en fonction du temps en
secondes

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 30
Figure 13: Signal imaginaire en fonction de la mesure de la conductivité mesurée en usine
La figure 14 ici-bas représente le signal réel d’échantillons d’anodes non cuites. La
vitesse d’acquisition des données devra être augmentée pour s’assurer d’avoir les vraies
valeurs maximales et minimales du signal.
Figure 14: Partie réelle 16 bits du signal de la sonde de 9 échantillons d’anodes non cuites
y = -0,0107x + 126,8650
55
60
65
70
75
5000 5500 6000 6500 7000
Ré
sist
ivit
é (
μΩ
-m)
Valeur maximal du signal numérique 16 bits
Valeur positive par rapport à la référence du signal réel 16 bits pour les 6 anodes cuites en fonction des valeurs de
conductivité électrique mesurées en µΩ-m
-150
-100
-50
0
50
100
150
127 53 79 105
131
157
183
209
235
261
287
313
339
365
391
417
443
469
495
521
547
573
599
625
651
677
703
729
755
781

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 31
3.5.2.2 Facteur extérieur indésirable pour le signal de la sonde
Le transport des anodes n’étant pas isolé de tous facteurs extérieurs, le programme gérant
les informations devra détecter les anomalies n’ayant aucun lien avec la sonde. Par
exemple, le passage d’un chariot élévateur, qui est grandement constitué de matériaux
ferromagnétiques, fera changer significativement la valeur imaginaire de la tension de
sortie. Il sera impératif de supprimer ces valeurs indésirables afin que l’acquisition des
valeurs concernant la conductivité électrique de la sonde soit significative.
Il a été remarqué que les matériaux ferromagnétiques font varier le signal imaginaire au
moins 1,3 fois plus que le signal réel. Pour les anodes non cuites, le signal réel est plus
sensible que le signal imaginaire. En plus, la variation du signal est beaucoup plus élevée
pour les matériaux ferromagnétiques que les anodes non cuites. En sachant ces éléments,
il sera possible de négliger les données faussées par le passage de matériaux
ferromagnétiques à proximité de la sonde. Ceci nous permettra d’avoir des données
fiables et si le cas surviendrait qu’un élément ferromagnétique resterait tout le long de
l’analyse d’une anode, un message d’avertissement disant que l’anode n’a pas pu être
analysée apparaitra. Il n’est pas dramatique d’ignorer l’analyse d’une anode sur un lot
puisqu’en principe chaque lot présentera des similitudes en ce qui concerne la
conductivité électrique.
3.5.2.3 Augmentation de l’acquisition de données (voir différence avec les courbes pour
montrer qu’on ne voit plus les sommets du signal)
En examinant les courbes de la conductivité électrique des anodes non cuites (comme la
figure 14 et surtout 15), on peut remarquer que l’acquisition de la valeur maximale et
minimale n’est pas toujours faite. Souvent, une seule valeur est au maximum. Ceci nous
fait dire qu’il peut arriver que la valeur maximale enregistrée ne corresponde pas au
maximum de la courbe à partir duquel la conductivité électrique est évaluée. Il a donc été
pensé d’alléger le plus possible le programme de la sonde afin de faire l’acquisition de
donnée à intervalle encore plus rapide. Peu importe la vitesse du convoyeur, plus
l’acquisition de données sera rapide, plus précises seront les données. En ayant des
anodes de plus grande dimension, il sera plus facile de faire l’acquisition de la valeur
maximum et minimum du signal. Les petites variations brusques sont dues au défaut dans

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 32
le matériau et ne doivent être tenues en compte sur la valeur maximale et minimale du
signal.
Figure 15: Signal réel 16 bits d'une anode non cuite en fonction du temps
La figure 16 explique pourquoi la sonde ne prend pas la valeur maximum quelquefois.
4440
4460
4480
4500
4520
4540
4560
4580
4600
0,5
3,3
6,2
9,0
11,9
14,8
17,6
20,5
23,3
26,2
29,0
31,9
34,7
37,6
40,5
43,3
46,2
49,0
51,9
54,7
57,6
60,5
63,3
66,2
69,0
71,9
Sig
na
l ré
el
sur
16 b
its
Temps en secondes
Signal réel d'une anode non cuite en fonction du temps en secondes

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 33
0 50 100 150 200 250 300 350 400 450 500-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1A
mpl
itude
du
sign
al r
éel
temps
Figure 16: Exemple d'échantillonnage inadéquat du signal de la sonde
3.5.2.4 Correction du signal en fonction du temps
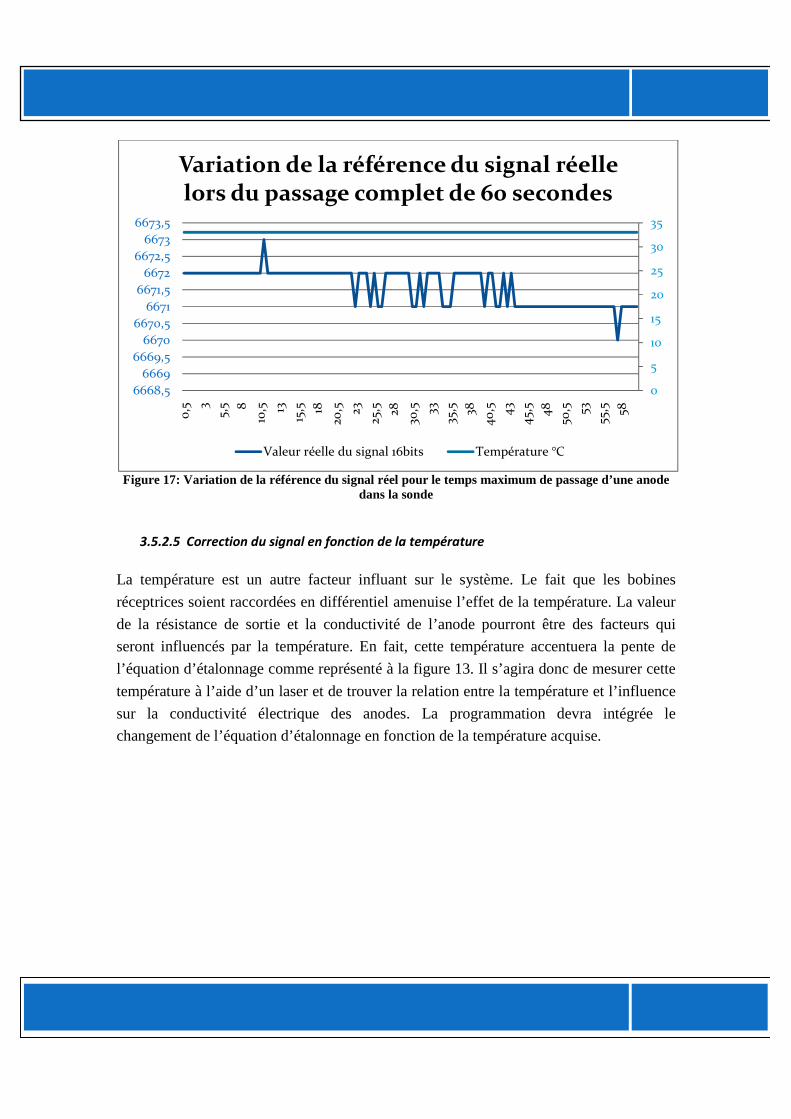
Un autre graphique ici-bas présente les fluctuations plus précises pour environ le temps
de passage d’une anode qui ne sera jamais plus de 60 secondes. Le signal varie entre
6673 et 6671, ce qui est une très faible variation. Une moyenne entre la référence avant le
passage de l’anode et la fin du passage de l’anode sera fait même si ce n’est qu’une
précaution.
Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 34
Figure 17: Variation de la référence du signal réel pour le temps maximum de passage d’une anode
dans la sonde
3.5.2.5 Correction du signal en fonction de la température
La température est un autre facteur influant sur le système. Le fait que les bobines
réceptrices soient raccordées en différentiel amenuise l’effet de la température. La valeur
de la résistance de sortie et la conductivité de l’anode pourront être des facteurs qui
seront influencés par la température. En fait, cette température accentuera la pente de
l’équation d’étalonnage comme représenté à la figure 13. Il s’agira donc de mesurer cette
température à l’aide d’un laser et de trouver la relation entre la température et l’influence
sur la conductivité électrique des anodes. La programmation devra intégrée le
changement de l’équation d’étalonnage en fonction de la température acquise.
0
5
10
15
20
25
30
35
6668,56669
6669,56670
6670,56671
6671,56672
6672,56673
6673,5
0,5 3
5,5 8
10,5 13
15,5 18
20,5 23
25,5 28
30,5 33
35,5 38
40,5 43
45,5 48
50,5 53
55,5 58
Variation de la référence du signal réelle lors du passage complet de 60 secondes
Valeur réelle du signal 16bits Température °C

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 35
3.5.3 Programmation de l’automate
3.5.3.1 Diagramme de flux niveau 1
Figure 18: Diagramme de flux niveau 1 du programme général
3.5.3.2 Programme calculant la valeur inférieure moyenne et supérieure
Valeur moyenne inférieure
Il s’agit d’analyser le tableau de donnée de la valeur réelle du signal. À partir du début,
on compare chaque donnée avec la 5e donnée jusqu’à ce qu’il y est une différence jugée
assez grande pour ne plus faire partie de la valeur moyenne inférieure. On additionne
Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 36
ensuite chacune des données retenues et on divise par le nombre de données afin d’avoir
une valeur précise.
Valeur moyenne supérieure
La valeur moyenne supérieure est programmée de la même façon que la valeur moyenne
inférieure sauf qu’on décortique le tableau de valeur à partir de la fin et on décrémente le
pointeur.
3.5.3.3 Programme qui corrige le signal
Soustraction de la référence
Il a été remarqué que la référence change parfois du début à la fin d’acquisition d’une
anode. Afin de soustraire la bonne valeur, il faut simplement faire une courbe linéaire
avec la «valeur moyenne inférieure » et la «valeur moyenne supérieure ». On soustrait
ensuite la valeur de la courbe à la courbe du signal, ce qui ramène le signal de référence à
0.
Absolue du signal
Il s’agit de mettre toutes les valeurs en absolu afin de faciliter les calculs mathématiques
qui s’en suivent.
Annulation des sommets non voulus
Des perturbations telles que le choc d’une bobine modifie le signal malencontreusement.
Pour annuler ces effets, on a mis une valeur maximale de variation entre 2 points
successifs pour 5 données subséquentes de celle analysée. Lorsque la variation est trop
élevée, on regarde la seconde et si celle-ci est correcte par exemple, on annule la valeur
aberrante en le remplaçant par la moyenne des 2 valeurs qui l’entourent.
Passage de matériaux ferromagnétiques à proximité
Le passage de matériaux ferromagnétiques doit être ignoré afin de donner une bonne
valeur de la conductivité électrique. Ces matériaux modifient beaucoup plus la partie
Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 37
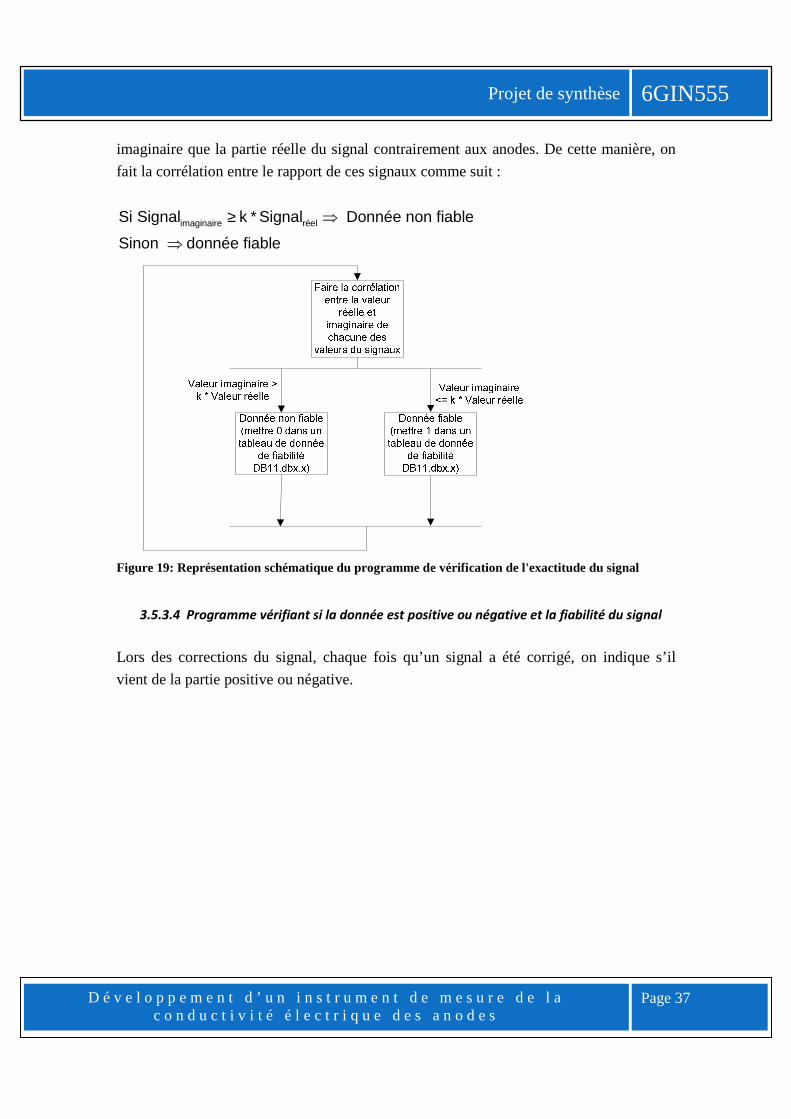
imaginaire que la partie réelle du signal contrairement aux anodes. De cette manière, on
fait la corrélation entre le rapport de ces signaux comme suit :
imaginaire réelSi Signal k * Signal Donnée non fiable
Sinon donnée fiable
≥ ⇒
⇒
Figure 19: Représentation schématique du programme de vérification de l'exactitude du signal
3.5.3.4 Programme vérifiant si la donnée est positive ou négative et la fiabilité du signal
Lors des corrections du signal, chaque fois qu’un signal a été corrigé, on indique s’il
vient de la partie positive ou négative.

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 38
Figure 20: Représentation schématique pour savoir si le côté positif est plus fiable que le côté négatif
Valeur maximum
La valeur maximum est repérée en comparant donnée par donnée et lorsque la valeur
suivante est plus grande que la précédente, on la stocke dans une donnée nommée
«valeur_max». En échantillonnant le tableau au complet, la valeur maximum est repérée
à coup sûr. On ignore bien sûr les données reliées aux passages de matériaux
ferromagnétiques.
Valeur minimum
Le même algorithme est utilisé pour trouver la valeur minimum du signal.

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 39
Valeur de conductivité
La valeur de la conductivité est calculée à partir du signal reçu et de l’équation créée lors
du mode étalonnage. En principe, il serait possible de prendre la valeur maximum ou
minimum puisqu’il devrait avoir la même valeur. En réalité, avec les facteurs externes,
les 2 valeurs ne sont pas toujours identiques. Le choix de la valeur choisie dépend de la
partie du signal qui s’est fait le moins corrigé pour avoir une valeur plus représentative.
3.5.4 Interface homme-machine
Figure 21: Représentation de l'IHM
L’interface homme machine est fonctionnel pour la réalisation de test en usine. Voici l’explication de chaque composante : 1. Hearbeat => Vérification de la communication entre l’automate et la sonde 2. Sélecteur entre mode étalonnage et mode analyse

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 40
3. Interrupteur de position d’entrée installée à l’entrée du convoyeur 4. Affichage que l’automate est en mode acquisition de données 5. Interrupteur de position de sortie installée à la sortie du convoyeur 6. Affichage du signal réel en temps réel en 16 bits sur graphique 7. Affichage du signal réel en temps réel en 16 bits 8. Première anode d’étalonnage (celle qui a la plus petite résistivité) 9. Deuxième anode d’étalonnage (celle qui a la plus grande résistivité) 10. Limite de conductivité électrique acceptable par la personne en charge du
système 11. Équation calculée à la suite du mode étalonnage
Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 41
4. Bilan des activités
4.1 Arrimage formation pratique/universitaire Plusieurs cours ont été utiles pour l’accomplissement de ce projet. Le cours d’électromagnétisme a été primordial pour la conception du système de bobinage et la compréhension du fonctionnement du système. Pour ce qui est de l’aspect automatisation, ma technique au Cegep m’a plus été utile pour l’achat et la configuration du projet. Pour ce qui est de la programmation, le cours de programmation en «C» m’a été utile puisque le langage de programmation utilisé se ressemblait beaucoup. Ce projet m’a permis d’acquérir une expérience concernant les étapes nécessaires à la mise en industrialisation d’un produit (prototype dans mon cas). Il n’est pas toujours évident d’anticiper toutes les contraintes qu’un système peut avoir lorsqu’il sera intégré dans un milieu industriel, mais cette pratique sera sûrement utile sur le marché du travail.
4.2 Travail d’équipe Ce projet était assigné à une seule personne, mais il n’aurait jamais été possible de le réaliser sans l’aide de plusieurs personnes. Premièrement, M. Luc Parent et M. Daniel Audet, qui ont un brevet sur lequel est basé ce projet, m’ont été d’une grande aide sur l’aspect compréhension et technique du projet. Deuxièmement, M. Christophe Volat, professeur à l’UQAC, m’a aidé grandement sur l’aspect électromagnétisme du projet. Finalement, le projet n’aurait pas été mis à terme sans l’aide de quelques compagnies, tel que Siemens pour son prêt d’équipements d’automatisation et Franklin empire pour son soutien technique de ces équipements Siemens. Équipe : Éric Goudreault Superviseur : M. Daniel Audet Spécialiste des équipements Siemens : M. Jimmy Chabot (Siemens) Support technique des équipements Siemens : M. Pascal Lavoie (Franklin empire) Spécialiste du procédé de fabrication des anodes : M. Luc Parent (Hades) Spécialiste des convoyeurs industriel : Groupe Génitique
4.3 Respect de l’échéancier

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 42
4.3.1 Diagramme de Gantt
Figure 22: Tableau du diagramme de Gantt 1/2
Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 43
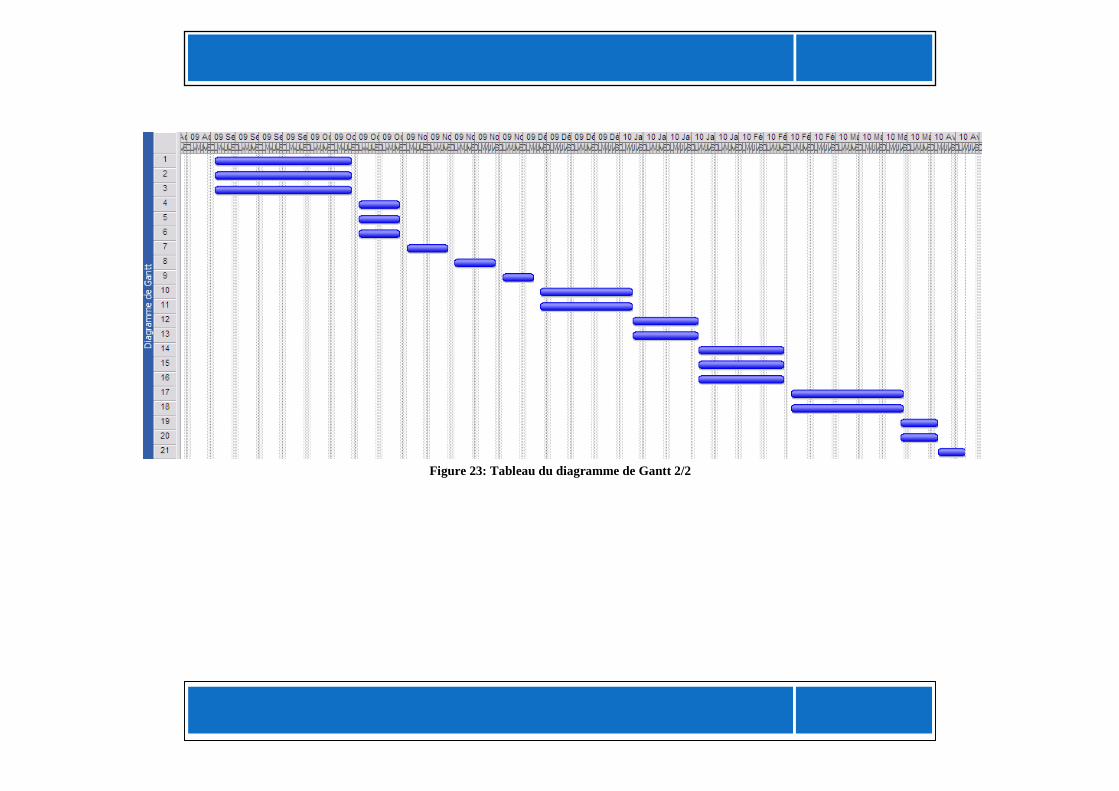
Figure 23: Tableau du diagramme de Gantt 2/2

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 44
4.3.2 Changement à l’échéancier La conception des bobines a été beaucoup plus longue que prévu dûes aux manques
d’informations sur les courants de Foucault dans un matériau et l’influence d’un noyau
sur les caractéristiques des bobines. De plus, la géométrie des bobines a rendu le calcul
beaucoup plus difficile que prévu. Cette étape a donc été rallongée jusqu’à la fin du
projet. Le fait qu’il n’a pas été possible d’avoir des anodes de dimension différente, la
production d’un nouveau prototype était donc rendue inutile. Le prototype initial était
quand même suffisant afin de réaliser les tâches de conception du projet. Les tâches de
conception reliées à la programmation ont changé puisqu’il était nécessaire de créer un
environnement utile afin de faire des tests en usine et non l’implantation d’un produit
final. C’est donc un mode d’étalonnage et d’analyse qui a été créé et on a annulé le mode
manuel et automatique. Une banque de données était envisagée au départ, mais le but
principal du projet était de savoir si on pouvait industrialiser le principe de mesure et non
l’optimisation de l’usine.
4.4 Analyse et discussion
La partie automatisation du projet s’est bien déroulée. Le mode étalonnage et analyse
fonctionne et l’interface homme-machine a été construite en fonction des tests à réaliser
en usine. Le choix des pièces d’automatisation a bien été choisi en fonction de l’usine
visée. La partie du projet concernant les composantes mécaniques n’est qu’un croquis,
mais devrait suffire aux tests du projet. Pour ce qui est du dimensionnement des bobines,
plusieurs facteurs ne sont pas calculables théoriquement. Il a donc été pris en compte les
facteurs calculables afin d’avoir un système permettant de mesurer la conductivité
électrique des anodes non cuites en usine. Il va surement être de mise de faire des
modifications en usine puisque la théorie diffère toujours de la pratique.

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 45
5. Conclusion et recommandations
Les étapes nécessaires à l’implantation d’un tel système sont dans le plan de devis. La
partie mécanique devra être approuvée et modifiée si nécessaire dépendamment des
facteurs et données dont il n’était pas possible d’avoir. La conception du système de
mesures devrait aussi être approuvée par un logiciel d’électromagnétisme tel que
«Infolytica MagNet» vu la complexité de calcul dû à la géométrie des bobines à
concevoir avant sa fabrication finale. Un système d’acquisition de la température des
anodes devra être intégré afin d’y trouver la corrélation entre la température de l’anode et
la conductivité électrique. Ensuite, une compensation sur l’équation d’étalonnage devra
être faite en fonction de la température de ces anodes. La section d’automatisation
fonctionne bien en continu sous le mode étalonnage et analyse. Ce projet a prouvé qu’il
était possible de fabriquer un système permettant de mesurer la conductivité électrique
des anodes non cuites dans une chaîne de production industrielle. Il s’agira donc de faire
des tests du système construit en usine afin d’y trouver la relation entre le signal reçu et la
conductivité électrique des anodes non cuites.

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 46
6. Annexe A : Cahier des charges
Introduction
Objectif du document Ce document présente les étapes nécessaires à résoudre pour le développement d’un
instrument de mesure industriel pour la mesure de la conductivité électrique des anodes.
Description du projet
Contexte La conductivité électrique d’une anode n’est pas mesurable pour l’instant avant la cuisson
de celle-ci. Il faut la faire cuire pendant une douzaine de jours avant d’en soutirer une
carotte et de mesurer sa conductivité électrique. Le fait de connaître la conductivité
électrique d’une anode avant qu’elle soit cuite permettrait de changer le mélange de base
afin d’améliorer les anodes qui se feront mouler après. Un brevet concernant la mesure de
la conductivité électrique d’une anode a été approuvé et les inventeurs sont les
promoteurs du projet. Le principe de fonctionnement n’a donc pas à être prouvé. Un
prototype est déjà existant à petite échelle. La sonde permet d’envoyer un courant de 0,5
A dans la bobine d’excitation et d’y mesurer la valeur réelle et imaginaire de la tension de
sortie. Ces valeurs dépendent évidemment de l’anode qui passe au travers la sonde.
Réalisation du projet
1. Conception de la mesure de la conductivité élect rique
1.1 La bobine d’excitation
• Choix du courant d’excitation
• Choix du nombre de tours
Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 47
• Choix de la grosseur du fil
• Configuration
• Schéma du circuit de la bobine d’excitation • Calcul du condensateur de résonance
• Liste de matériaux nécessaires
1.2 Les deux bobines réceptrices
• Choix du nombre de tours • Choix de la grosseur du fil
• Configuration
• Schéma du circuit des bobines réceptrices • Calcul des diodes Zener
• Liste des pièces nécessaires
2. Composantes mécaniques
2.1 Moyen de manutention
• Choix du type de convoyeur sans matériaux ferromagnétiques • Choix d’un moyen afin de centraliser l’anode sur le convoyeur
• S’assurer le passage complet même si le convoyeur arrête • Moins de vibration possible
2.2 Supports complet des bobines
• Choix du matériau • Dimensionnement des supports
• Aucune vibration tolérée
• Schéma des supports • Liste de matériau nécessaire
3. Automatisation
3.1 Pièce nécessaire
• Choix de l’automate
• Choix de la carte de communication entre l’automate et la sonde • Choix des cartes d’entrées et sorties
Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 48
• Choix d’un écran tactile communiquant avec l’automate
• Choix du protocole de communication entre l’automate et le réseau futur de l’usine visée
• Choix de jauge de température pour les bobines et les résistances du circuit
• Choix du système de détection des anodes (doit fonctionner dans un environnement très poussiéreux)
3.2 Programmation de l’automate
• Acquisition des données numériques de la sonde à l’automate.
• Concevoir un mode étalonnage • Concevoir un mode analyse
• Concevoir un algorithme permettant de corriger le signal dû à des faussetés correspondant aux passages de matériaux ferromagnétiques (chariot élévateur), arrêt du convoyeur, changement du signal de référence, etc.
• Déduire la conductivité électrique des anodes • Correction de la valeur de la conductivité en fonction de la température
des bobines et de la température des résistances de mesure. • Configurer le protocole de communication afin qu’il soit prêt à
communiquer à un automate de l’usine visée.
3.3 Interface homme-machine
• Développer une interface homme machine sur ordinateur • Configurer la communication entre l’automate et l’écran tactile
• Développer une interface homme machine pour l’écran tactile
4. Vue d’ensemble • Circuit électrique et réseautage des appareils • Convoyeur et supports complets des bobines

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 49
7. Annexe B : Devis
Introduction
Objectif du document Ce document présente les spécifications techniques du développement d’un instrument de
mesure industriel pour la mesure de la conductivité électrique des anodes. Il contient les
solutions permettant d’implanter cet instrument de mesure dans une usine. Tous les
étapes nécessaires sont décrites plus bas.
Description du projet
Contexte La conductivité électrique d’une anode n’est pas mesurable pour l’instant avant la cuisson
de celle-ci. Il faut la faire cuire pendant une douzaine de jours avant d’en soutirer une
carotte et de mesurer sa conductivité électrique. Le fait de connaître la conductivité
électrique d’une anode avant qu’elle soit cuite permettrait de changer le mélange de base
afin d’améliorer les anodes qui se feront mouler après. Un brevet concernant la mesure de
la conductivité électrique d’une anode a été approuvé et les inventeurs sont les
promoteurs du projet. Le principe de fonctionnement n’a donc pas à être prouvé
industriellement. Un prototype est déjà existant à petite échelle. La sonde permet
d’envoyer un courant de 0,5 A dans la bobine d’excitation et d’y mesurer la valeur réelle
et imaginaire de la tension de sortie. Ces valeurs dépendent évidemment de l’anode qui
passe au travers la sonde.
Réalisation du projet

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 50
1. Conception de la mesure de la conductivité élect rique
1.1 La bobine d’excitation
• Choix du courant d’excitation
I=0,5A (fixé par la source sinusoïdale fixe de la sonde) • Choix du nombre de tours
N=432 tours • Choix de la grosseur du fil
AWG12 • Configuration
72 spires de larger X 6 spires de hauteur • Schéma du circuit de la bobine d’excitation
constantrV =
variablesourceV =
Figure 24: Schéma du circuit de la bobine d’excitation
• Condensateur de résonance
Devra mesurer l’inductance lorsque la bobine sera fabriquée et se servir de l’équation suivante pour en déduire le condensateur nécessaire :
20 _
0
_
1
Fréquence de fonctionnement (980HZ)
inductance mesurée de la bobine
=⋅
==
compensationbobine émettrice
bobine émettrice
CF L
F
L
• Liste de matériaux nécessaires 1956 m de câble AWG12 (ex : 12 x MW-12AWG10)
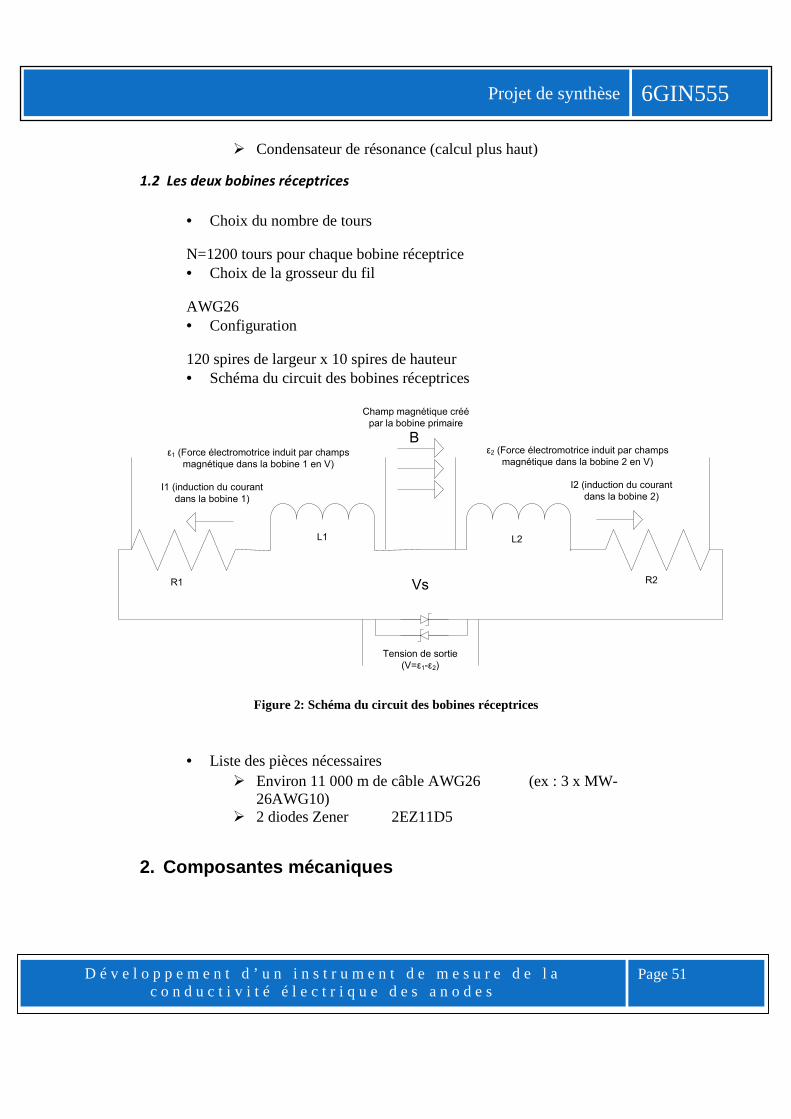
Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 51
Condensateur de résonance (calcul plus haut)
1.2 Les deux bobines réceptrices
• Choix du nombre de tours
N=1200 tours pour chaque bobine réceptrice • Choix de la grosseur du fil
AWG26 • Configuration
120 spires de largeur x 10 spires de hauteur • Schéma du circuit des bobines réceptrices
I1 (induction du courant
dans la bobine 1)
I2 (induction du courant
dans la bobine 2)
ε1 (Force électromotrice induit par champs
magnétique dans la bobine 1 en V)
ε2 (Force électromotrice induit par champs
magnétique dans la bobine 2 en V)
Champ magnétique créé
par la bobine primaire
Tension de sortie
(V=ε1-ε2)
B
VsR1
L1
R2
L2
Figure 2: Schéma du circuit des bobines réceptrices
• Liste des pièces nécessaires Environ 11 000 m de câble AWG26 (ex : 3 x MW-
26AWG10) 2 diodes Zener 2EZ11D5
2. Composantes mécaniques

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 52
Le projet ne s’est pas trop attardé sur la partie mécanique du système. Mais des recherches et calculs ont quand même été faits afin de voir la faisabilité du système. Les détails plus bas sont des suggestions et reste à être approuvés.
2.1 Moyen de manutention
• Choix du type de convoyeur sans matériaux ferromagnétiques
Convoyeur à rouleau non métallique «NMR-6689» de la compagnie «Globe Composite Solutions Ltd.» d’une longueur totale de 10 pieds et de 48 pouces de largeur.
• Choix d’un moyen afin de centraliser l’anode sur le convoyeur
Un entonnoir fait de nylon naturel afin de centraliser l’anode
• S’assurer le passage complet même si le convoyeur arrête
Le groupe «Génitique» s’est penché rapidement sur se sujet et a confirmé que l’anode traverserait le convoyeur complet sous sa propre poussée. Devrait quand même confirmer un autre fois avec les données du convoyeur où le système sera établi pour s’en assurer.
• Moins de vibrations possibles
Ce type de convoyeur est spécialement conçu pour éliminer le plus possible les vibrations.
2.2 Supports complets des bobines
• Choix du matériau
Nylon naturel de type 6/6 de la compagnie «Polyalto» • Dimensionnement des supports
Fichier Solidwork en fichier joint avec le devis. Reste à confirmer la hauteur du convoyeur où le système sera établi et tous les autres paramètres dont les informations étaient manquants. • Liste de matériaux nécessaire à acheter
o 4 feuilles de NYLON NATUREL FLE 1/2" X 48" X 96" de chez
Polyalto o 6 pieds supplémentaires du convoyeur à commander plus bas

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 53
• Liste des pièces à découper
Le fichier autocad (.dwg) est en fichier joint avec le devis o Nylon naturel 12'' x 39,5'' x 1/2'' : 4 X o Nylon naturel 18'' x 39,5'' x 1/2'' : 2 X o Nylon naturel 12'' x 49'' x 1/2'' : 4 X o Nylon naturel 18'' x 49'' x 1/2'' : 2 X o Nylon naturel 12'' x 60'' x 1/2'' : 2 X o Nylon naturel 30'' x 24'' x 1/2'' : 2 X o Nylon naturel 24'' x 13.5'' x 1/2'' : 2 X o Nylon naturel 24'' x 13.5'' x 1/2'' : 4 X
3. Automatisation
3.1 Achat
• Processeur Siemens «CPU315-2DP» 1* 6ES7315-2AG10-0AB0 • Carte mémoire micro 2 Mb 1* 6ES7953-8LL11-0AA0 • Processeur de communication série RS232C 1* 6ES7340-1AH02-0AE0 • Carte d’entrée digitale (16DI, 24VCC, S7-300) 1* 6ES7321-1BL00-0AA0 • Carte de sortie digitale (32DO, 24VCC) 1* 6ES7322-1BL00-0AA0 • Connexion frontale 40 PIN 3* 6ES7392-1AM00-0AA0 • PS PS-307 (120-230AC, 24CC, 5A) 1* 6ES7307-1EA00-0AA0 • Rail de montage 530 mm 1* 6ES7390-1AF30-0AA0 • Écran tactile 10 pouces MP277 1* 6AV6652-3PB01-DAA0 • Connecteur Profibus 1* 6GK1500-0EA02 • Connecteur Profibus 90 degré 1* 6ES7972-0BA12-0XA0 • 2 interrupteurs de position 2* 3SE5000-0AE10-1AJ0
3.2 Programmation de l’automate
Le fichier principal qui gère le programme complet est le «OB1»
• Acquisition des données numériques de la sonde à l’automate. Fichier «FC22» => Acquisition du signal en temps réel Fichier «DB41» => État du mode réception RS232 Fichier «DB43» => Données acquises de la sonde Signaux principaux :

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 54
DB43.DBW5 Signal réel DB43.DBW7 Signal imaginaire DB43.DBX20.0 Hearbeat
• Mode acquisition des données Fichier «FC4» (SCL_FC4_Acquisition )=> Fait l’acquisition et
suspend lors d’arrêt du convoyeur
• Concevoir un mode étalonnage
Il s’agit d’insérer les 2 anodes d’étalonnages à la suite de l’autre (commencer par celle avec la plus grande résistivité (μΩ-m)). L’automate calcul automatiquement les paramètres de l’équation.
Bloc «FC16»( FC16_Vimaginaire(cuite).scl)=> Corrige le signal imaginaire
Bloc «FC19»( FC19_Mode étalonnage.scl)=> Corrige le signal réel et calcul les paramètres de l’équation pour en déduire la conductivité en mode analyse
• Concevoir un mode analyse
Il s’agit d’insérer les 2 anodes d’étalonnages à la suite de l’autre (commencer par celle avec la plus grande résistivité (μΩ-m)). L’automate calcul automatiquement les paramètres de l’équation.
Bloc «FC16»( FC16_Vimaginaire(cuite) .scl)=> Corrige le signal imaginaire
Bloc «FC17»( FC17_Vimaginaire(cuite).scl)=> Corrige le signal réel et déduit la conductivité électrique à partir des paramètres calculés en mode étalonnage
• Concevoir un algorithme permettant de corriger le signal dû à des
faussetés correspondant aux passages de matériaux ferromagnétiques (chariot élévateur), arrêt du convoyeur, changement du signal de référence, etc.
Cet algorithme est fait dans le bloc FC17 (FC17_Vimaginaire(cuite).scl)

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 55
• Déduire la conductivité électrique des anodes
Cet algorithme est fait dans le bloc FC17 (FC17_Vimaginaire(cuite).scl)
• Correction de la valeur de la conductivité en fonction de la température des bobines et de la température des résistances de mesure.
Ayant un système de bobines réceptrices connecté en différentiel, la température n’est pas supposée affecter le signal. Il restera à savoir si la température de l’anode et celle des pièces de la sonde changeront beaucoup et affectera le signal rendu en usine.
3.3 Interface homme-machine
Figure 25: Représentation de l'IHM

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 56
L’interface homme machine est fonctionnel pour la réalisation de test en usine. Voici l’explication de chaque composante : 12. Hearbeat => Vérification de la communication entre l’automate et la sonde 13. Sélecteur entre mode étalonnage et mode analyse 14. Interrupteur de position d’entrée installée à l’entrée du convoyeur 15. Affichage que l’automate est en mode acquisition de données 16. Interrupteur de position de sortie installée à la sortie du convoyeur 17. Affichage du signal réel en temps réel en 16 bits sur graphique 18. Affichage du signal réel en temps réel en 16 bits 19. Première anode d’étalonnage (celle qui a la plus petite résistivité) 20. Deuxième anode d’étalonnage (celle qui a la plus grande résistivité) 21. Limite de conductivité électrique acceptable par la personne en charge du
système 22. Équation calculée à la suite du mode étalonnage 23. Affichage de la valeur numérique 16 bits de la dernière anode analysée reliée
à sa conductivité (celles des 9 autres plus bas) 24. Affichage de la résistivité de la dernière anode analysée en μΩ-m(celles des 9
autres plus bas) 25. Type d’anode :
Si rien => anode conforme Anode non-conforme Anode d’étalonnage • Configurer la communication entre l’automate et l’écran tactile
Reste à faire puisque n’a pas eu d’écran tactile pour le projet
• Développer une interface homme machine pour l’écran tactile
L’interface homme machine conçu pour l’ordinateur est fonctionnel pour l’écran tactile de 10 pouces qui devra être acheté. Il reste simplement à changer les paramètres pour l’envoyer dans un écran tactile «MP277» au lieu de sur un «PC».

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 57
5. Vue d’ensemble • Circuit électrique et réseautage des appareils
Figure 26: Vue d'ensemble du système de mesure et d'automatisation

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 58
• Structure de la conception mécanique
Figure 27: Schéma de représentation du convoyeur et des supports complets des bobines

Projet de synthèse 6GIN555
D é v e l o p p e m e n t d ’ u n i n s t r u m e n t d e m e s u r e d e l a c o n d u c t i v i t é é l e c t r i q u e d e s a n o d e s
Page 59
8. Remerciements
• M. Luc Parent et M. Daniel Audet pour leur aident et m’avoir permit de travailler sur ce projet
• La compagnie Siemens pour le prêt d’équipements d’automatisations • La compagnie Franklin Empire pour le support technique des équipements
Siemens • M. Christophe Volat pour son aide sur l’aspect électromagnétisme du projet
9. Référence
[1] D. Audet, L. Parent, System and method to forecast the electrical conductivity of anodes for aluminium production before baking, Chicoutimi, 2009, http://www.freepatentsonline.com/EP0491641.html [2] P. Levallois, D. Gauvin, Bilan des normes et recommandations d’exposition aux champs électromagnétiques et aux rayonnements ultraviolets, IRSST, 1996, p.25, (http://www.irsst.qc.ca/files/documents/PubIRSST/B-047.pdf) [3]http://support.automation.siemens.com/WW/llisapi.dll/csfetch/1137332/HB_CP340_c.pdf?func=cslib.csFetch&nodeid=1261015&forcedownload=true
[4] D. Halliday, R. Resnick, J. Walker, Électricité et magnétisme, édition du renouveau pédagogique, p.196 [5] G. Peix, Principe physique du contrôle par courant de Foucault, INSA de Lyon, Lyon, 1988