rahul.mahajan@noaa · 2018. 10. 29. · Rahul Mahajan* [email protected] * Acknowledgement:...
26
EnKF overview Rahul Mahajan* [email protected] * Acknowledgement: Jeff Whitaker, Daryl Kleist, and GSI development team. 1
Transcript of rahul.mahajan@noaa · 2018. 10. 29. · Rahul Mahajan* [email protected] * Acknowledgement:...

EnKFoverviewRahulMahajan*
*Acknowledgement:JeffWhitaker,DarylKleist,andGSIdevelopmentteam.
1

2
3DVarCostfunc6on
J:Penalty(Fittobackground+FittoobservaLons)δx:Analysisincrement(xa–xb)xa,xb:Analysis,BackgroundB:Backgrounderrorcovariance(esLmatedoffline)H:ObservaLons(forward)operatorR:ObservaLonerrorcovariance(Instrument+
representaLveness)d=yo-Hxb,whereyoaretheobservaLonsCostfuncLon(J)isminimizedtofindsoluLon,δx[xa=xb+δx]
J δx( ) = 12δxTB-1δx + 1
2Hδx -d( )T R-1 Hδx -d( )
2

3
HybridEnsembleVarCostfunc6on
Bs:(Sta6c)background-errorcovariance(esLmatedoffline)Be:(Flow-dependent)background-errorcovariance(esLmated
fromensemble)β: WeighLngfactor(0.25meanstotalBis¾ensemble).
Jhybrid δx( ) = β2δxTBs
−1δx+1−β2
δxTBe−1δx+ 1
2Hδx -d( )TR−1 Hδx -d( )
3

WhatdoesBedo?
Increment(allsta6c) Increment(allensemble)
TemperatureobservaLonnearawarmfront
4
Bs Be

WhatdoesBedo?
½Sta6c,½ensemble
FirstguessSLP,wind Allsta6c
Allensemble
ZonalwindobservaLonnearahurricane(Ike)
5

WhatdoesBedo?
Ps ob
First-Guess SLP contours
3DVarincrementwouldbezero!(cross-variablecovarianceshardtomodelwithsta9cBs)
SurfacepressureobservaLonnearan“atmosphericriver”
6

WhatdoesBedo?
• Addssitua6on-dependencetoanalysisincrements.
• SparseobservaLonsnearcoherentdynamicalfeaturesusedmoreeffecLvely.
• Changesintheobservingnetworkcanbecapturedinbackground-errorvariance.
• Moreinforma9onextractedfromobserva9ons=>Moreskillfulforecasts
7

Sowhat’sthecatch?
• Rank Deficiency – Need a fairly large O(100) ensemble to represent uncertainty
• Too few degrees of freedom available to fit the observations • Low rank approximation yields spurious long-distance
correlations
• Mistreatment of “system error/uncertainty” – Sampling (as above), model error, observation operator
error, representativeness, etc.
• State estimate is ensemble average – This can produce unphysical estimates, smooth out high
fidelity information, etc. 8

Sowhat’sthecatch?
9
• TheGSIvariaLonalsystemdoesnotprovidetheensemble–itprovidesananalysisthatcanbeinterpretedastheensemblemean,givenanensemblethatrepresentsforecastuncertainty.
• InNCEPoperaLons,an“EnsembleKalmanFilter”(EnKF)isusedtogeneratethebackgroundensemble.

Dataassimila6onterminology• y:ObservaLonvector(weatherballoons,satellite
radiances,etc.)• x:thestateoftheatmosphereasrepresentedbythe
model• xb:Backgroundstatevector(“prior”)• xa:Analysisstatevector(“posterior”)• H:(hopefullylinear)operatortoconvertmodelstateà
observaLonlocaLon&type• R:ObservaLon-errorcovariancematrix• Pb:Background-errorcovariancematrix• Pa:Analysis-errorcovariancematrix
10

ApproachestoSolu6on• TwomainperspecLvesofpracLcaldataassimilaLon&hybrid
approach
11
Varia6onalApproach:LeastsquareesLmaLon[maximumlikelihood]– 3D-Var(3diminspace)– 4D-Var(4thdimisLme)
Sequen6al(KF)Approach:MinimumVarianceesLmate[minimumuncertainty]– OpLmalInterpolaLon(OI)– (Extended/Ensemble)Kalman
Filter
p(x)
Courtesy:KayoIde
p(x)

FromBayestheoremto4DVarandthe(Ensemble)KalmanFilter
Variational methods maximize the posterior PDF to find the state trajectory x that best fits the obs y in a least-squares sense. In practice, this is done by minimizing a cost function, which is what’s inside the exp:
The minimum can be found analytically if H is linear (see Lorenc 1986) This gives the equations for the Kalman Filter
• Matrix Pb is too big for any computer, covariance update step impractical.
• Instead, represent PDFs of x and y by an ensemble, compute sample estimate of Pb and xb. Evolve the sample, not the full covariance. EnKF gives same result as full KF if ensemble size becomes infinite.
12
p(x|y) / exp
⇣�(x� xb)
TPb�1(x� xb)� (y �Hx)TR�1
(y �Hx)⌘
J (x) / (x� xb)TPb�1(x� xb) + (y �Hx)TR�1(y �Hx)

Computa6onalshortcutsinEnKF:(1)SimplifyingKalmangaincalculaLon
K = PbH T HPbH T +R( )−1
define Hxb = 1m
Hx ib
i=1
m
∑
PbH T =1m−1
x ib − xb( ) Hx ib −Hxb( )
i=1
m
∑T
HPbH T =1m−1
Hx ib −Hxb( ) Hx ib −Hxb( )
i=1
m
∑T
ThekeyhereisthatthehugematrixPbisneverexplicitlyformed13

Computa6onalshortcutsinEnKF:(2)serialprocessingofobservaLons(requiresobservaLonerrorcovarianceRtobediagonal)
EnKFBackgroundforecasts
ObservaLons1and2
Analyses
EnKFBackgroundforecasts
ObservaLon1
Analysesaqerobs1 EnKF
ObservaLon2
Analyses
Method1
Method2
14

TheserialEnKF–arecipeGivenasingleobyowithexpectederrorvarianceR,anensembleofmodelforecastsxb(modelpriors),andanensembleofpredictedobservaLonsyb=Hxb(observaLonpriors):
Step1:UpdateobservaLonpriors.(1a)updateforobpriormeans(1b)rescalingofobpriorperturba4onswherethescalarK=var(yb)/(var(yb)+R),overbardenotesmeans,primedenotesperturbaLons,superscriptbdenotesprior,adenotesanalysis.Linearinterpola9onbetweenobserva9onandobserva9onpriormeanwithweightK(0<=K<=1),rescalingofobserva4onpriorensemblesoposteriorvarianceisconsistentwithKalmanfilter,i.e.var(ya)=(1-K)var(yb)=var(yb)R/(var(yb)+R).whenvar(yb)<<R,allweightgiventoprior.whenvar(yb)>>R,allweightgiventoobservaLon.
ya
= (1�K)yb
+ Kyo
y0
a =p
(1�K)y0
b
15

TheserialEnKF–arecipe(2)
Step2:Updatemodelpriors.LetΔx=xa-xbbeanalysisincrementformodelpriors,Δy=ya-ybisanalysisincrementforobservaLonpriors.(2)Δx=GΔycomputa4onofincrementstomodelpriorwhereG=cov(xb,ybT)/var(yb)Linearregressionofmodelpriorsonobserva9onpriors.Onlychangesmodelpriorswhenxbandybarecorrelatedwithintheensemble.Ifthereismorethanoneobtobeassimilated,theobservaLonpriorsforother(notyetassimilated)obs(Yb)shouldbealsobeupdatedusing(2)withΔxreplacedbyΔY.NextiteraLon,replaceybwithnextcolumnofYb,removingthatcolumnfromYb.AqereachiteraLonthemodelpriorsandobservaLonpriorsaresettothelatestanalysisvalues(xareplacesxb,YareplacesYb).ConLnueiteraLngunLlYbisempty.
16

Infla6onandLocaliza6on
• Infla6on– UsedtoinflateensembleesLmateofuncertaintytoavoidfilterdivergence(addiLveandmulLplicaLve)
• Localiza6on– DomainLocaliza6on
• SolvesequaLonsindependentlyforeachgridpoint(LETKF)– CovarianceLocaliza6on
• Performedelementwise(Schurproduct)oncovariancesthemselves
17

Methodsforrepresen6ngmodelerror(infla6on)
• Mul6plica6veinfla6on:– RelaxaLon-to-priorspread(RTPS)– RelaxaLon-to-priorperturbaLon(Zhangetal.2004)– AdapLve(Anderson2007)
• Addi6veinfla6on:Addrandomsamplesfromaspecified
distribuLontoeachensemblememberaqertheanalysisstep.– Env.Canadausesrandomsamplesofisotropic3DVarcovariancematrix.
– NCEPusedrandomsamplesof48-h–24-hforecasterror(fcstsvalidatsameLme).
18

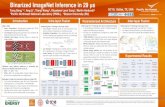
ImperfectModel(Addi9ve+Mul9plica9veInfla9onExample)
• AddiLveinflaLonaloneoutperformsmulLplicaLveinflaLonalone(comparevaluesy-axistovaluesalongx-axis)
• AcombinaLonofbothisbewerthaneitheralone.
• MulLplicaLveandaddiLveinflaLonrepresenLngdifferenterrorsourcesintheDAcycle?
19

Covariance Localization – Simple Example
20
EsLmatesofcovariancesfromasmallensemblewillbenoisy,withsignal-to-noisesmallespeciallywhencovarianceissmall

Covariancelocaliza6on–NWPEx.• AMSUANOAA15channel6radianceat150E,-50S.
• Incrementtolevel30(~310mb)temperaturefora1KO-Ffor40,80,160,320and640ensmemberswithnolocalizaLon.
21
N=40 N=80
N=160 N=320 N=640

Factorslimi6ngEnKFperformance1)Treatmentofmodelerror
Mustaccountforthebackgrounderrorcovarianceassociatedwith“modelerror”(anydifferencebetweensimulatedandtrueenvironment).Methodsusedsofar:
1) mulLplicaLveinflaLon(mult.enspertsbyafactor>1).2) model-basedschemes(e.g.stochasLckineLcenergy
backscawerforrepresenLngunresolvedprocesses,stochasLcallyperturbedphysicstendeciesforrepresenLngparameterizaLonuncertainty).
3) addiLveinflaLon(randompertsaddedtoeachmember–e.g.differencesbetween24and48-hforecastsvalidatthesameLme).Opera9onalNCEPsystemusesthefirsttwo.
22

Factorslimi6ngEnKFperformance2)Treatmentofsamplingerror(localiza9on)
• AllEnKFimplementaLonslocalizethespaLalimpactofobservaLonsonthemodelstate.• DonebyspaLallymodulaLngcovariancebetweenobs.priorandmodelstate,orbyonlyusingobservaLons‘close’toamodelstatevariabletoupdatethatvariable.• Neededtoaccountforlowrankofensemble(comparedtomodelstate).• Methodsusedcurrentlyarenotflowdependent,andassumethereisnosamplingerroratoblocaLon.
23

WhycombineEnKFandVar?FeaturesfromEnKF FeaturesfromVarCanpropagatePbfromacrossassimilaLonwindows
TreatmentofsamplingerrorinensemblePbesLmatedoesnotdependonH.
Moreflexibletreatmentofmodelerror(canbetreatedinensemble)
Dual-resoluLoncapability–canproduceahigh-res“control”analysis.
AutomaLciniLalizaLonofensembleforecasts.
EaseofaddingextraconstraintstocostfuncLon,includingastaLcPbcomponent.
24

EnKFmemberupdate
member2analysis
highresforecast
GSIEns/Var highresanalysis
member1analysis
member2forecast
member1forecast
recenteranalysisensemble
Ensemble-Varworkflow
member3forecast
member3analysis
Previous Cycle Current Update Cycle 25

Summary• TheEnKFusesanensembleoffirst-guessforecaststoesLmatethebackground-errorcovariance.EveryensemblememberisupdatedateachanalysisLme.– Parallelcode,scalableouttoO(1000’s)ofprocessorsaslongasnumberofobs<<numberofstatevars.
– Requiresstatevectorinmodelandobspace,plusobs,asinput.
– GSIusedtocomputeforwardobservaLonoperator(separatesteprunbeforeEnKF).
• NeedtocarefullytunelocalizaLonlengthscales(dependsonmodelresoluLon,observingnetwork).
• Ensemble(co)variancesmustberepresentaLveofcontrolforecasterror.Treatmentofmodelerroriscrucial.
26