Quiz d'esame - fulviodisciullo.files.wordpress.com · 2.2. Sistemi lineari 21 Soluzione. Osserviamo...
39
v 1 = 1 1 v 2 = 1 2 v 3 = 2 1 {v 1 , v 2 , v 3 } v 1 + v 2 = λv 3 λ ∈ R L(v 1 , v 2 , v 3 )= R 3 λ 1 v 1 + λ 2 v 2 = v 3 λ 1 ,λ 2 ∈ R R 2 R 2
-
Upload
nguyentuong -
Category
Documents
-
view
218 -
download
0
Transcript of Quiz d'esame - fulviodisciullo.files.wordpress.com · 2.2. Sistemi lineari 21 Soluzione. Osserviamo...
Capitolo 2
Quiz d'esame
2.1 Matrici e spazi vettoriali
Quiz 2.1. Tema d'esame 06/02/2015. Si considerino i vettori v1 =
(1
1
),
v2 =
(1
2
)e v3 =
(2
1
). Si indichi l'a�ermazione corretta.
(A) I vettori {v1, v2, v3} sono linearmente indipendenti.
(B) v1 + v2 = λv3 per qualche λ ∈ R.
(C) L(v1, v2, v3) = R3.
(D) λ1v1 + λ2v2 = v3 per qualche λ1, λ2 ∈ R.
Soluzione. Dal momento che abbiamo tre vettori in R2, sappiamo che possono generaresolamente spazi in R2 (escludiamo la (C)) e che sono necessariamente linearmente dipendenti(escludiamo la (A)).
La risposta (D) fornisce esattamente la condizione di dipendenza lineare dei tre vettori asse-gnati.
Al �ne di escludere le risposte non corrette, osserviamo come la somma dei primi due vettorinon fornisce un vettore proporzionale al terzo ed è pertanto da escludere anche la (B).

18 Capitolo 2. Quiz d'esame
Quiz 2.2. Tema d'esame 06/02/2015. Data la matrice A =
1 0 3
0 2 0
1 0 3
, si indichi
l'a�ermazione corretta.
(A) Il determinante di A è 6.
(B) Le righe della matrice A sono linearmente dipendenti.
(C) La matrice ha rango 1.
(D) p(T ) = T 2 − 6T è il polinomio caratteristico di A.
Soluzione. Escludiamo subito la (D) dal momento che il polinomio caratteristico ha gradopari alla dimensione della matrice quadrata alla quale è associato.
Osserviamo che la prima e la terza riga di A sono uguali: le tre righe sono quindi dipendentie la risposta corretta è quindi la (B).
Non può essere la (A) poiché il determinante non nullo assicura l'indipendenza lineare e nonpuò essere la (C) poiché la prima e la seconda riga sono indipendenti e pertanto rg(A) = 2.
Quiz 2.3. Tema d'esame 06/02/2015. Si considerino i sottospazi vettoriali di R3
cos�de�niti:
U = L
0
1
3
,
−101
e V =
x
y
z
| x − 3y + z = 0
.
Quale delle seguenti a�ermazioni è vera?
(A) U ⊕ V = R3.
(B) U = V .
(C) dim(U ∩ V ) = 1.
(D) dimU > dimV .
Soluzione. Dal momento che V è de�nito da una equazione lineare omogenea possiamodire che dimV = 2 (vedi Teorema di Rouché-Capelli); dal momento che i generatori di U nonsono proporzionali abbiamo che dimU = 2 e pertanto la (D) è da escludere.
Considerato inoltre che dim(U + V ) = dim(U) + dim(V ) − dim(U ∩ V ), abbiamo chedim(U ∩ V ) > 1 e pertanto U e V non possono fornire una scomposizione in somma direttadi R3 e la (A) è da escludere.

2.1. Matrici e spazi vettoriali 19
Troviamo i generatori di V :
V =
3y − z
y
z
| y , z ∈ R
=
y
3
1
0
+ z
−101
| y , z ∈ R
=
= L
3
1
0
,
−101
.
Osserviamo quindi che U e V condividono uno dei due generatori; per stabilire se la rispostacorretta è la (B) o la (C), calcoliamo la dimensione dello spazio generato dai generatori di U
e di V come rango della matrice che ha sulle colonne i generatori:
dim(U + V ) = rg
0 −1 3 −11 0 1 0
3 1 0 1
= rg
1 0 1 0
3 1 0 1
0 −1 3 −1
=
= rg
1 0 1 0
0 1 −3 1
0 −1 3 −1
= rg
1 0 1 0
0 1 −3 1
0 0 0 0
= 2.
Si ha pertanto che dim(U ∩ V ) = 2 e che necessariamente, grazie al conto dimensionale,che U = V , cioè la (B). D'altra parte è anche possibile osservare che, detti u1, u2 e v1, v2 igeneratori di U e V : u1 = v1 + 3v2.
Quiz 2.4. Tema d'esame 11/07/2014. Sono dati i seguenti sottospazi di R3:
U = L ((1, 0, 1), (1, 1, 1)) ; V = L ((0, 1, 2), (0, 1, 1)) .
Quale delle seguenti a�ermazioni è corretta?
(A) U ∩ V è l'insieme vuoto.
(B) dim(U ∩ V ) = 1.
(C) dim(U ∩ V ) = 2.
(D) U ⊂ V .
Soluzione. Sicuramente la (A) non può essere vera: sicuramente il vettore nullo appartienead entrambi i sottospazi. Per ragioni di dimensioni, inoltre, due sottospazi bidimensionali (losono entrambi poichè i generatori di ciascuno non sono proporzionali tra loro) in R3 devonoavere intersezione di dimensione almeno 1.Queste osservazioni ci permettono di escludere anche la (D): l'inclusione non può essere propriadal momento che entrambi hanno dimensione 2. Abbiamo quindi che o i due sottospazi hannointersezione in uno spazio monodimensionale (ed è vera la (B)) o coincidono (ed è vera la(C)).

20 Capitolo 2. Quiz d'esame
Sfruttando il Teorema della dimensione (Teorema 1.4), possiamo trovare la dimensione del-l'intersezione calcolando la dimensione della somma come il rango della matrice che ha sullecolonne i generatori di U e di V :
dim(U + V ) = rg
1 1 0 0
0 1 1 1
1 1 2 1
= rg
1 1 0 0
0 1 1 1
0 0 2 1
= 3.
Pertanto dim(U ∩ V ) = 2 + 2− 3 = 1, cioè la (B).
Quiz 2.5. Tema d'esame 06/02/2015. Si considerino le matrici A =(1 2 3
)e
B =(3 2 1
)e sia BT la matrice trasposta di B. Si indichi l'a�ermazione corretta.
(A) La matrice A · BT ha rango 2.
(B) La matrice A + B è invertibile.
(C) Il determinante della matrice BT · A è zero.
(D) A · BT = BT · A.
Soluzione. Discutiamo le varie possibilità .
La matrice A ·BT ha dimensione [1× 3] · [3× 1] = [1× 1] e non può avere rango 2: la (A) èfalsa.
La matrice A + B non è quadrata e non può essere invertibile: la (B) è falsa.
La matrice BT ·A è una matrice 3×3 le cui righe sono rispettivamente il triplo di A, il doppiodi A e A; il determinante è quindi 0 poiché, ad esempio, il rango di questa matrice non èmassimo: la (C) è vera.
Le matrici A · BT e BT · A, come già osservato, hanno un diverso numero di righe e colonnee non possono essere uguali: le dimensioni contano e la (D) è falsa.
Quiz 2.6. Tema d'esame 18/09/2014. In R3 sono dati i seguenti sottospazi:
U = L((2, 3, 4), (0, 1, 0)), e V = L((2, 0, 4), (0, 0, 1)).
Quale delle seguenti a�ermazioni è vera?
(A) U = V .
(B) Il vettore (0, 0, 2) appartiene sia a U sia a V .
(C) U + V = R3.
(D) U ∩ V è l'insieme vuoto.

2.2. Sistemi lineari 21
Soluzione. Osserviamo che (come sempre accade in queste situazioni) la (D) è falsa poichél'intersezione di due sottospazi vettoriali (di uno stesso spazio) contiene sempre almeno ilvettore nullo e quindi non è vuota.Per eventualmente mostrare direttamente la (A) o la (C) calcoliamo la dimensione dello spaziosomma di U e di V che sappiamo essere generato dai generatori dei due addendi. Mettendoi vettori sulle righe ed eseguendo operazioni elementari sulle righe abbiamo quindi:
dim(U + V ) = rg
2 3 4
0 1 0
2 0 4
0 0 1
= rg
2 3 4
0 1 0
0 −3 0
0 0 1
= rg
2 3 4
0 1 0
0 0 0
0 0 1
= 3.
Lo spazio somma ha quindi dimensione 3 ed essendo un sottospazio di R3 deve pertantocoincidere con R3 e la (C) è vera.D'altro canto era possibile osservare che (2, 3, 4) − 3(0, 1, 0) = (2, 0, 4); pertanto uno deigeneratori di V sta in U, mentre per l'altro generatore (o equivalentemente per il suo doppio,come richiesto nella a�ermazione (C)), si ha che il sistema α(2, 3, 4) + β(0, 1, 0) = (0, 0, 1)
non ha soluzioni, infatti corrisponde a:2α = 0
3α+ β = 0
4α = 1
.
che è incompatibile. Non è quindi possibile trovare una combinazione lineare dei generatoridi U che individui il secondo generatore di V .
2.2 Sistemi lineari
Quiz 2.7. Tema d'esame 10/07/2015. Si consideri il seguente sistema linearex + 4y = 2
2x + 8y = 4
3x + 12y = 7.
Stabilire quale delle seguenti risposte è corretta.
(A) Il sistema ha una sola soluzione.
(B) Il sistema ha due incognite libere.
(C) Il sistema ha una sola incognita libera,.
(D) Il sistema non è compatibile.

22 Capitolo 2. Quiz d'esame
Soluzione. La matrice associata al sistema è :
1 4 2
2 8 4
3 12 7
. Osserviamo che i coe�-
cienti della seconda equazione sono il doppio di quelli della seconda (e quindi essenzialmentela stessa equazione, mentre la terza equazione ha i coe�cienti delle incognite che sono iltriplo rispetto alla prima, ma termine noto che non rispetta questa proporzionalità . Il sistemarisulterà non compatibile.
D'altra parte si vede facilmente che indicata come d'abitudine con A|B la matrice completa delsistema, rg(A|B) = 2 e rg(A) = 1; il Teorema di Rouché Capelli ci assicura l'incompatibilitàdel sistema.
Quiz 2.8. Tema d'esame 10/07/2015. Se il sistema lineare AX = B di due equazioniin due incognite ha in�nite soluzioni, allora:
(A) rg(A) = 2.
(B) rg(A) < 2.
(C) rg(A|B) = 2.
(D) rg(A) 6= rg(2A).
Soluzione. La risposta (D) è certamente errata (il rango non cambia se raddoppiamo tuttii coe�cienti della matrice).
Il Teorema di Rouché-Capelli ci assicura che per avere in�nite soluzioni è necessario cherg(A) = rg(A|B) (per avere compatibilità del sistema) e che questo rango deve essere minoredi quello massimo: in questa situazione 2. L'unica risposta che permette di costruire unsistema come da ipotesi è la (B) Nel caso (A) infatti avremmo che anche la matrice completaavrebbe rango 2 e quindi avremmo un sistema compatibile, ma non una unica soluzione. Nelcaso (C) invece potremmo avere o un sistema compatibile con unica soluzione o un sistemanon compatibile, entrambi contro le ipotesi.
Quiz 2.9. Tema d'esame 10/07/2015. Il sistema linearex + y + z = 2h
2x + 2y + 2z = 4h
3x + 3y + 3z = 6
(A) ha due incognite libere per ogni h 6= 1.
(B) ha una sola soluzione se h = 0.
(C) ha nessuna soluzione per ogni h 6= 1.
(D) ha una sola incognita libera per ogni h 6= 1.

2.2. Sistemi lineari 23
Soluzione. Riducendo per righe la matrice associata al sistema otteniamo: 1 1 1 2h
2 2 2 4h
3 3 3 6
−→ 1 1 1 2h
1 1 1 2h
1 1 1 2
−→ 1 1 1 2h
0 0 0 0
0 0 0 2− 2h
.
Pertanto:
� per h = 1 si ha che rg(A) = 1 e rg(A|B) = 1 e il sistema è compatibile con 3− 1 = 2
parametri liberi;
� per h 6= 1 rg(A) = 1 e rg(A|B) = 2 e il sistema non è compatibile.
La risposta corretta risulta quindi la (C).
Quiz 2.10. Tema d'esame 10/07/2015. Se il sistema lineare AX = B di quattroequazioni in tre incognite è risolubile, ma non ha incognite libere, allora sicuramente:
(A) rg(A|B) = 3;
(B) rg(A) 6 2;
(C) rg(A) = 2;
(D) rg(A) 6= rg(8A).
Soluzione. Escludiamo la (D) poiché il rango non cambia moltiplicando per scalare.
Ragionando sulla situazione proposta si ha che la matrice A ha m = 4 righe e n = 3 colonne;siccome il sistema è risolubile allora, grazie al Teorema di Rouché-Capelli, n− rg(A) = 0, cioèrg(A) = 3; inoltre essendo risolubile si ha rg(A) = rg(A|B). La risposta corretta è quindi la(A).
Quiz 2.11. Tema d'esame 26/06/2015. Dato il seguente sistema lineare:x + y + z + t = 2
2x + 2y + z + t = 4
3x + 3y + 2z + 2t = 6
(A) ha due incognite libere.
(B) ha una sola soluzione.
(C) non ha soluzioni.
(D) ha la variabile z come unica variabile libera.

24 Capitolo 2. Quiz d'esame
Soluzione. Osserviamo che il sistema ha tre equazioni e quattro incognite. Considerando lamatrice associata e le sue riduzioni per righe otteniamo: 1 1 1 1 2
2 2 1 1 4
3 3 2 2 6
→
1 1 1 1 2
0 0 −1 −1 0
0 0 −1 −1 0
→
1 1 1 1 2
0 0 −1 −1 0
0 0 0 0 0
.
Pertanto il sistema scritto il sistema nella forma AX = B, si ha che rg(A|B) = rg(A) = 2 e,per il teorema di Rouché-Capelli il sistema è compatibile e la soluzione dipende da 4− 2 = 2
variabili libere. La risposta corretta è quindi la (A).
Quiz 2.12. Tema d'esame 06/02/2015. Si consideri il sistema lineare di equazioni:x + y = z + x = 2x + 2y ; si indichi l'a�ermazione corretta.
(A) Lo spazio delle soluzioni ha dimensione 1.
(B) Il sistema non ha soluzioni.
(C) Il vettore nullo è l'unica soluzione del sistema.
(D) La matrice dei coe�cienti del sistema ha rango 1.
Soluzione. Scriviamo il sistema in forma estesa (e sovrabbondante):x + y = z + x
x + y = 2x + 2y
z + x = 2x + 2y
;
otteniamo il sistema equivalente: y − z = 0
x + y = 0
x − 2y + z = 0
Essendo un sistema omogeneo ha almeno la soluzione nulla (esclude la (B)); la soluzione sisceglie avendo a disposizione il rango della matrice associata al sistema. Riducendo per righeotteniamo:
rg
0 1 −11 1 0
1 −2 1
= rg
1 −2 1
1 1 0
0 1 −1
=
= rg
1 −2 1
0 3 −10 1 −1
= rg
1 −2 1
0 3 −10 0 −2/3
= 3
Il numero di soluzioni dipende quindi da 3− 3 = 0 parametri e la risposta corretta è la (C).

2.2. Sistemi lineari 25
Analogamente avremmo potuto raggiungere la stessa conclusione calcolando il determinantedella matrice associata:
det
0 1 −11 1 0
1 −2 1
= 0− 1 · (1)− 1 · (−3) = 2 6= 0.
Quiz 2.13. Tema d'esame 18/09/2014. Il sistema linearekx + 4y + 5z = 0
x + 2y − z = 0
y + 3z = 0
(A) non ha soluzioni per k = 1.
(B) ha in�nite soluioni per k = 0.
(C) ha soluzioni per ogni valore di k .
(D) ha una sola soluzione per k = 1.
Soluzione. In generale si tratterebbe di discutere il numero di soluzioni del sistema al variaredi k . In questa situazione, dal momento che il sistema è omogeneo, siamo sicuri che il sistemaabbia almeno la soluzione nulla per ogni valore di k , il che corrisponde alla (C).
Volendo escludere esplicitamente le altre possiamo considerare la matrice A dei coe�cienti delsistema e discuterne il rango. In particolare possiamo escludere (A) poiché ci sono soluzioniper ogni valore di k .
A =
k 4 5
1 2 −10 1 3
R1↔R2−−−−−→
1 2 −1k 4 5
0 1 3
R2−kR1−−−−−→
1 2 −10 4− 2k 5 + k
0 1 3
R2↔R3−−−−−→
1 2 −10 1 3
0 4− 2k 5 + k
R2↔R3−−−−−→
1 2 −10 1 3
0 4− 2k 5 + k
R3−(4−2k)R2−−−−−−−−−→
1 2 −10 1 3
0 0 7(k − 1)
.
Pertanto osserviamo che il rango della matrice è 3 per k 6= 1. La (B) è falsa poiché per k = 0
c'è una ed una sola soluzione; la (D) è falsa poiché per k = 1 il rango scende e le soluzioniaumentano.
26 Capitolo 2. Quiz d'esame
Quiz 2.14. Tema d'esame 11/07/2014. Siano A ∈ R2,3 e X ∈ R3,1. Si supponga A
di rango 2. Quale delle seguenti a�ermazioni è necessariamente vera?
(A) Esiste B ∈ R2,1 tale che il sistema lineare AX = B non ha soluzioni.
(B) Il sistema lineare omogeneo AX = 0 ha una sola soluzione.
(C) Il sistema lineare AX = B ha una sola soluzione, qualunque sia B.
(D) Il sistema lineare AX = B ha in�nite soluzioni, qualunque sia B.
Soluzione. Si tratta di discutere il numero di soluzioni del sistema; qualunque sia B ∈ R2,1
il vettore dei termini noti, abbiamo 2 = rg(A) = rg(A|B). Il sistema, grazie al Teorema diRouché-Capelli (Teorema 1.2), è compatibile con ∞3−2 =∞1 soluzioni.Tra le a�ermazioni proposte l'unica vera è la (D).
2.3 Applicazioni lineari
Quiz 2.15. Tema d'esame 10/07/2015. Quale delle seguenti a�ermazioni è vera?
(A) I vettori v ∈ R3 di modulo 1 ortogonali al vettore i + j formano uno spaziovettoriale.
(B) La funzione φ : R[X ]→ R de�nita da φ(P(X )) = P(4) è lineare.
(C) L'insieme delle funzioni f : R → R tali che limx→∞ f (x) 6= 2 è uno spaziovettoriale reale.
(D) Le matrici quadrate 2× 2 con determinante nullo formano uno spazio vettoriale.
Soluzione. Procediamo per veri�ca diretta ed esclusione.Risposta (A): preso un vettore w come richiesto, il vettore 2w continua ad essere ortogonalea i+ j, ma non ha più modulo 1; l'a�ermazione è falsa.Risposta (C): consideriamo una funzione g(x) per cui limx→∞ g(x) = 1; si ha che g(x) stanell'insieme richiesto; tuttavia la funzione g(x) + g(x) avrà limite uguale a 2 e quindi nonappartiene all'insieme. L'a�ermazione è scorretta.Risposta (D): consideriamo due matrici a determinante nullo e calcoliamone la somma; è veroche il determinante è ancora nullo? Pensiamo ad un possibile controesempio (sfruttando, adesempio, la base delle matrici quadrate).
E1,1 =
(1 0
0 0
)e E2,2 =
(0 0
0 1
)

2.3. Applicazioni lineari 27
hanno entrambe determinante nullo, ma la loro somma ha determinante 1. L'a�ermazione èfalsa.
L'applicazione proposta dalla risposta (B) è invece corretta; infatti:
� (somma) φ(P(X ) + Q(X )) = P(4) + Q(4) = φ(P(X )) + φ(Q(X ));
� (moltiplicazione per scalare) φ(λP(X )) = λP(4) = λφ(P(X )).
Quiz 2.16. Tema d'esame 10/07/2015. Quale delle seguenti a�ermazioni è vera?
(A) L'insieme delle funzioni f : R → R tali che limx→∞ f (x) = −∞ è uno spaziovettoriale reale.
(B) Le matrici quadrate di ordine 2 reali con determinante nullo sono uno spaziovettoriale reale di dimensione 2.
(C) La funzione φ : R[X ]→ R[X ] de�nita da φ(P(X )) = P(X )−X ·P ′(X ) è lineare.
(D) I vettori dello spazio a tre dimensioni di lunghezza 15 formano uno spaziovettoriale.
Soluzione. Procediamo per veri�ca diretta ed esclusione.
Risposta (A): manca il vettore nullo, pertanto l'a�ermazione è falsa.
Risposta (B): come precedentemente osservato, l'a�ermazione è falsa.
Risposta (D): consideriamo il vettore v̄ appartenente all'insieme in questione; il suo doppioha lunghezza doppia e non appartiene più all'insieme. L'a�ermazione è falsa.
Controlliamo la correttezza dell'a�ermazione (C): è necessario veri�care il criterio per lalinearità .
� Valutiamo l'immagine della somma; sfruttando le note proprietà di linearità della derivatadi un polinomio, e riordinando ottentiamo:
φ(P(X ) + Q(X )) = (P(X ) + Q(X )) + X · (P(X ) + Q(X ))′
= P(X ) + X · P ′(X ) + Q(X ) + X · Q ′(X )
= φ(P(X )) + φ(Q(X )).
� Analogamente a quanto fatto prima, per la moltiplicazione per scalare otteniamo:
φ(λP(X )) = λP(X ) + X · (λP(X ))′ = λP(X ) + λX · P ′(X ) = λφ(P(X )).
Le condizione di linearità sono pertanto veri�cate e la (C) è l'a�ermazione corretta.

28 Capitolo 2. Quiz d'esame
Quiz 2.17. Tema d'esame 10/07/2015. Sia dato l'endomor�smo f : R3 → R3 così de-�nito: f (x , y , z) = (z , z , z), per ogni (x , y , z) ∈ R3. Quale delle seguenti a�ermazioniè corretta?
(A) f non è suriettivo;
(B) f è iniettivo;
(C) il vettore (1, 4, 24) possiede qualche controimmagine;
(D) f ha nucleo di dimensione 1.
Soluzione. Come primo passaggio, abbiamo che all'endomor�smo f è associata la matrice
A =
0 0 1
0 0 1
0 0 1
. Possiamo a�ermare preliminarmente che l'immagine di f è generata dal
vettore (1, 1, 1), ha dimensione 1 e pertanto f non è suriettiva e ha nucleo di dimensione 2.Questa osservazione esclude in un colpo solo le risposte (B) e (D); dal momento che l'immagineè generata da (1, 1, 1), il vettore (1, 4, 24) non sta nell'immagine e non può avere quindicontroimmagini; come già osservato precedentemente, f non è suriettivo e la risposta correttaè la (A).
Quiz 2.18. Tema d'esame 10/07/2015. Sia data l'applicazione lineare f : R3 → R4
de�nita da f (x , y , z) = (x − z , 2y , 0, 0). Quale delle seguenti a�ermazioni è vera?
(A) f è iniettiva.
(B) (1, 2, 0, 0) non ha controimmagini.
(C) f ha nucleo di dimensione 2.
(D) f non è suriettiva.
Soluzione. Come prima azione, scriviamo la matrice associata all'applicazione:
A =
1 0 −10 2 0
0 0 0
0 0 0
.
Osserviamo che l'immagine (generata dalle colonne indipendenti della matrice) ha dimensione2 (la prima e la terza colonna sono linearmente dipendenti). Applicando il teorema delladimensione: dim ker(f ) + 2 = 3, cioè dim ker(f ) = 1.Alla luce di quanto osservato, si ha che (A) è falsa (il nucleo non è nullo), la (C) non ècorretta (poiché il nucleo ha dimensione 1) e la (D) è sicuramente vera in quanto l'immagineha dimensione 2 e non 3 come dovrebbe se fosse suriettiva.
2.3. Applicazioni lineari 29
Per eliminare anche la (C) osserviamo che (ad esempio) f (1, 1, 0) = (1, 2, 0, 0) e pertanto lacontroimmagine del vettore non è vuota.
Quiz 2.19. Tema d'esame 26/06/2015. Sia data l'applicazione lineare f : R4 → R2
de�nita da f (x , y , z , t) = (x + z , x + z). Quale delle seguenti a�ermazioni è vera?
(A) l'equazione f (x , y , z , t) = (5, 5) non ha soluzioni.
(B) f è iniettiva.
(C) f ha nucleo di dimensione 2.
(D) f non è suriettiva.
Soluzione. Osserviamo come le due componenti dell'immagine sono uguali e date dallasomma della prima e della terza componente del vettore di partenza.La prima opzione è quindi falsa: ad esempio (1, 0, 4, 0) è soluzione. La seconda opzione èfalsa: (1, 0, 4, 38) ha la stessa immagine del vettore precedente e confuta quindi l'iniettivitàdell'applicazione.Osserviamo che f è sicuramente non suriettiva in quanto l'immagine di f è formata da vettoriche hanno componenti uguali: (0, 1) non ha controimmagini; la risposta corretta è quindi la(D).Per escludere esplicitamente la (C) possiamo osservare che l'immagine di f è L((1, 1)) ed hapertanto dimensione 1. Grazie al Teorema della dimensione abbiamo quindi che dim ker(f ) =
4− 1 = 3.
Quiz 2.20. Tema d'esame 06/02/2015. Si consideri l'applicazione lineare f : R2 → R2
de�nita da f (x , y) = (y + x , x + y). Si indichi l'a�ermazione corretta.
(A) f è un isomor�smo.
(B) f non è suriettiva.
(C) im(f ) = ∅.
(D) (1, 1) ∈ ker(f ).
Soluzione. Osserviamo che le due componenti dell'immagine sono uguali. Abbiamo quindiche f non può essere suriettiva e pertanto la risposta corretta è la (B). Questa osservazioneesclude la (A) e la (C); osserviamo come f (1, 1) = (2, 2) e pertanto anche la (D) è errata.

30 Capitolo 2. Quiz d'esame
Quiz 2.21. Tema d'esame 18/09/2014. Sia f l'endomor�smo di R2 de�nito da:
f
(x
y
)=
(y
y
).
Si indichi l'a�ermazione corretta.
(A) L'immagine di f è l'asse x .
(B) f è suriettivo.
(C) f è iniettivo.
(D) il nucleo di f è l'asse delle x .
Soluzione. Per abitudine e praticità esecutiva, individuiamo la matrice dell'endomor�smorispetto alla base canonica di R2.
Le immagini dei vettori di base sono f
(1
0
)=
(0
0
)e f
(0
1
)=
(1
1
); la matrice
associata è quindi A =
(0 1
0 1
). Possiamo quindi osservare direttamente che: la dimensione
dell'immagine è 1, conseguentemente anche quella del nucleo è 2− 1 = 1; questo esclude la(B) e la (C). Inoltre l'immagine è data dai vettori con le due componenti coincidenti e questoesclude la (A). Il nucleo di f contiene sicuramente l'asse x (come calcolato esplicitamente)ed avendo entrambi dimensione 1 devono coincidere, cioè la (D).
2.4 Rette, piani, sfere e circonferenze
Quiz 2.22. Tema d'esame 10/07/2015. Dati i piani α : x = −4 e β : y = 1, qualea�ermazione è corretta?
(A) Sono paralleli e hanno distanza 5.
(B) Hanno in comune una circonferenza.
(C) Non si tagliano.
(D) La retta lungo la quale si intersecano è sghemba con l'asse x .
Soluzione. Osserviamo innanzitutto che i due piani assegnati sono piani rispettivamenteparalleli ai piani coordinati. Il vettore normale relativo al piano α è nα = (1, 0, 0) e il vettorenormale relativo a β è nβ = (0, 1, 0). Osserviamo che i due piani non sono paralleli (edescludiamo la (A)) e che due piani non paralleli nello spazio si devono per forza incontrare

2.4. Rette, piani, sfere e circonferenze 31
(ed escludiamo la (C)); dal momento che la (C) non sembra poter essere vera, controlliamola correttezza dell'ultima risposta.
La retta r = α∩β ha equazioni parametriche
x = −4y = 1
z = t
, ed ha quindi direzione vr = (0, 0, 1),
diversa da quella dell'asse x ; dal momento che l'asse x è contenuto nel piano y = 0 e la rettar è contenuta in y = 1, le due rette in questione hanno intersezione vuota e, avendo direzionidi�erenti, sono pertanto sghembe.
Quiz 2.23. Tema d'esame 10/07/2015. Dati i piani α : x = 4y e β : x = 4y − 1
stabilire quali delle seguenti risposte è vera.
(A) Sono paralleli e hanno distanza 2.
(B) Si tagliano lungo una retta parallela all'asse y .
(C) Sono paralleli e hanno distanza 1√17.
(D) Contengono entrambi l'asse y .
Soluzione. Escludiamo subito la (D): l'asse y non può essere contenuto α e β poiché l'originenon appartiene a β. Altre risposte dipendono dal parallelismo.Osserviamo che α è ortogonale al vettore n̄α = (1,−4, 0) e che β è ortogonale a n̄β =
(1,−4, 0); i due piani sono quindi paralleli. La distanza è data dalla distanza tra un punto diα (ad esempio l'origine) e il piano β : x − 4y + 1 = 0:
d(α, β) = d(O, β) =| 0− 4 · 0 + 1 |√
(1)2 + (−4)2 + (0)2=
1√17,
che corrisponde alla risposta (C).
Quiz 2.24. Tema d'esame 10/07/2015. Le rette r : x = y = z , s : x = −y = z :
(A) Sono sghembe.
(B) Sono complanari.
(C) Sono parallele.
(D) Sono ortogonali.
Soluzione. Osserviamo che entrambe le rette sono determinate dall'equazione x = z ; le duerette saranno quindi complanari: controlliamone la posizione reciproca trovando le direzionicorrispondenti alle due rette:
r :
{x = y
x = zs :
{x = −y
x = z

32 Capitolo 2. Quiz d'esame
La direzione delle due rette è data da:
v̄r = det
i j k
1 −1 0
1 0 −1
= (1, 1, 1); v̄s = det
i j k
1 1 0
1 0 −1
= (−1, 1,−1).
Dal momento che i vettori non sono paralleli né hanno prodotto scalare nullo, escludiamo la(C) e la (D) per a�ermare la (B).
Quiz 2.25. Tema d'esame 18/09/2014. Le rette
r : (x , y , z) = (1− 3t, t, 1− 2t), s :
{x + 3y = 0
2y + z = 0,
(A) sono sghembe.
(B) sono complanari.
(C) sono ortogonali.
(D) sono coincidenti.
Soluzione. Escludiamo immediatamente la (D) dal momento che l'origine appartiene ads, ma non ad r . Dalle equazioni parametriche osserviamo che r è la retta passante perP = (1, 0, 1) e con direzione v̄r = (−3, 1,−2); la retta s invece passa, come già osservato,per l'origine O e ha direzione:
v̄s = det
i j k
1 3 0
0 2 1
= (3,−1, 2).
Pertanto r ed s sono parallele: questo esclude la (A) e la (C) e dimostra la (B).
Quiz 2.26. Tema d'esame 10/07/2015. Le rette: r : x = y = 1, s : x + 2y + 3z =
x − z = 0:
(A) Sono sghembe.
(B) Sono complanari e appartengono al piano α : x + yz = 1.
(C) Sono complanari e appartengono al piano β : x − y − z = 0.
(D) Sono incidenti.
Soluzione. Osserviamo immediatamente che α non è un piano e pertanto la (B) non puòessere corretta.

2.4. Rette, piani, sfere e circonferenze 33
Osserviamo che il piano β non può contenere la retta r in quanto, ad esempio, il punto (1, 1, 3)
appartiene alla retta r , ma non al piano β (si sostituiscano le coordinate alle equazioni).Per capire se le due rette sono sghembe o incidenti, possiamo provare a risolvere il sistemadato dalle due coppie di equazioni.
x = 1
y = 1
x + 2y + 3z = 0
x − z = 0
=⇒
x = 1
y = 1
1 + 2 + 3z = 0
1− z = 0
=⇒
x = 1
y = 1
3 + 3z = 0
z = 1.
Non essendoci soluzioni del sistema, concludiamo che le due rette sono sghembe.Alla luce di quanto a�ermato precedentemente, possiamo calcolare il rango della matriceassociata al sistema; riducendo per righe si ottiene:
rg
1 0 0 1
0 1 0 1
1 2 3 0
1 0 −1 0
= rg
1 0 0 1
0 1 0 1
0 2 3 −10 0 −1 −1
=
= rg
1 0 0 1
0 1 0 1
0 0 3 −30 0 −1 −1
= rg
1 0 0 1
0 1 0 1
0 0 1 −10 0 0 −2
= 4.
Quiz 2.27. Tema d'esame 26/06/2015. Le rette
r :
x = t
y = t
z = t
e s :
{x + y + z = 0
x + y = 0
(A) sono parallele e hanno distanza 1.
(B) sono complanari.
(C) sono entrambe perpendicolari ad uno stesso piano.
(D) sono sghembe.
Soluzione. Osserviamo che entrambe le rette passano per l'origine degli assi; la soluzionecorretta è pertanto la (B): due rette secanti individuano sempre un piano.Volendo escludere esplicitamente le altre proposte, osserviamo che r è la retta passante perl'origine e parallela al vettore v̄r = (1, 1, 1) mentre s è la retta che passa per l'origine ed èparallela al vettore
v̄s = det
i j k
1 1 1
1 −1 0
= (1, 1,−2).

34 Capitolo 2. Quiz d'esame
Le due rette non sono quindi parallele e non sono perpendicolari allo stesso piano.
Quiz 2.28. Tema d'esame 26/06/2015. I piani α : x = z e β : x = z + 2,
(A) sono paralleli e hanno distanza 2.
(B) si intersecano in una retta parallela all'asse y .
(C) contengono entrambi l'asse y .
(D) sono paralleli e hanno distanza√2.
Soluzione. Scrivendo le equazioni dei piani in forma implicita è immediato notare che i duepiani sono associati rispettivamente ai vettori normali:
n̄α = (1, 0,−1) e n̄β = (1, 0,−1).
I due piani condividono quindi la stessa retta ortogonale e sono paralleli o coincidenti (escludela (B)). Per testare la (C) osserviamo che l'asse y ha equazioni: x = 0, y = t, z = 0, t ∈ R;pertanto l'asse y è contenuto nel piano α, ma non nel piano β; in particolare i due piani nonsono coincidenti.Stabilito che i piani sono paralleli, Calcoliamo la distanza tra i piani come la distanza tra unodei due piani, ad esempio β e un punto dell'altro piano, ad esempio l'origine:
d(α, β) = d(O, β) =| 0− 0− 2 |√
(1)2 + (0)2 + (−1)2=
2√2=√2,
cioè la risposta (D).
Quiz 2.29. Tema d'esame 11/07/2014. È data la retta r : x + y = 0, x − y − z = 0.Quale delle seguenti a�ermazioni è vera?
(A) r passa per il punto (1, 1, 0).
(B) r è contenuta nel piano z = 0.
(C) r ha la direzione del vettore (1, 1, 2).
(D) r è contenuta nel piano 2x − z = 0.
Soluzione. Escludiamo la (A) poiché le coordinate del punto proposto non soddisfano laprima delle due equazioni cartesiane di r . Per discutere le altre a�ermazioni è utile trovare laforma parametrica di r ; osserviamo che la retta passa per l'origine e avrà direzione (sfruttandole direzioni ortogonali ai due piani che de�niscono r) parallela a:
v̄r = det
i j k
1 1 0
1 −1 −1
= (−1, 1,−2).

2.4. Rette, piani, sfere e circonferenze 35
Possiamo quindi escludere la (C) e notare che r ha equazioni parametriche
r : (x , y , z) = (0− t, 0 + t, 0− 2t), t ∈ R.
Le equazioni parametriche soddisfano quindi la condizione 2x−z = 0 e la (D) è da considerarsiprovata.
Quiz 2.30. Tema d'esame 06/02/2015. Si consideri il piano α : 2x + y + z = 1 e ilpunto P = (1, 1, 1) e sia d(P, α) la loro distanza. Si indichi l'a�ermazione corretta.
(A) d(P, α) = −√3
6.
(B) d(P, α) =√3.
(C) d(P, α) =
√6
6.
(D) d(P, α) =
√6
2.
Soluzione. La (A) è priva di senso in quanto una distanza deve essere positiva. Per sceglierela risposta corretta, calcoliamo direttamente utilizzando la formula per la distanza tra un pianoe un punto:
d(P, α) =| 2 · 1 + 1 + 1− 1 |√
22 + 12 + 12=
3√6·√6√6=
3√6
6=
√6
2,
cioè la (D).
Quiz 2.31. Tema d'esame 26/06/2015. Il sistema di due equazioni x2+y2+z2−2x =
0, x = y + 8 rappresenta nello spazio:
(A) una circonferenza con centro C = (8, 0, 0).
(B) una circonferenza non reale.
(C) due rette reali che si intersecano.
(D) una circonferenza di raggio 2.
Soluzione. Le due equazioni rappresentano rispettivamente una sfera Σ e un piano π. Lepossibili intersezioni sono quindi: una circonferenza, un punto (circonferenza di raggio 0),l'insieme vuoto (circonferenza non reale); questa osservazione esclude direttamente la (C).La sfera Σ ha centro K = (1, 0, 0) e, siccome passa per l'origine, ha raggio r = d(O,K ) = 1.Questo esclude la (D), dal momento che in una sfera di raggio 1 non può essere contenutauna circonferenza di raggio 2.

36 Capitolo 2. Quiz d'esame
Calcoliamo quindi la distanza tra K e π e confrontiamola con il raggio:
d(K , π) =| 1− 0− 8 |√(1)2 + (−1)2
=7√2> r = 1,
pertanto sfera e piano non si toccano e la risposta corretta è la (B).
Quiz 2.32. Tema d'esame 18/09/2014. Nello spazio è data la sfera S di equazione:
x2 + y2 + z2 − 4x = 0.
Quale delle seguenti a�ermazioni è vera?
(A) S ha raggio 1.
(B) La retta r : (x , y , z) = (t, t, 0) interseca S .
(C) La retta s : (x , y , z) = (t, 0, t) passa per il centro di S .
(D) (√2,−√2, 0) ∈ S .
Soluzione. Dall'equazione di S possiamo immediatamente dedurre che il centro della sferaè nel punto C = (2, 0, 0); dal momento che le coordinate dell'origine soddisfano l'equazioneO ∈ S e il raggio è dato dalla distanza tra O e C : ρ = d(C ,O) = 2.Siccome il raggio non è 1, si esclude la (A); siccome il centro non è del tipo (t, 0, t), si escludela (C). Il punto (
√2,−√2, 0) non soddisfa le equazioni di S in quanto 2 + 2 + 0− 4
√2 6= 0
e la (D) è quindi falsa.Per mostrare la correttezza della (B) basta notare come O ∈ r (per t = 0) e quindi O ∈ r ∩S ;in generale notiamo come intersecando la retta r con S si ottiene l'equazione:
t2 + t2 + 0− 4t = 0; → 2t(t − 2) = 0; → t1 = 0, t2 = 2;
che assicura l'esistenza di due punti di intersezione tra la retta e la sfera.
Quiz 2.33. Tema d'esame 10/07/2015. Si consideri il sottoinsieme S di R3 de�nitodalle equazioni {
x2 + y2 + z2 − 2x = 0
x = 0
Quale delle seguenti a�ermazioni è corretta?
(A) S è formato da due rette del piano Oxy .
(B) S è una retta.
(C) S è formato da un solo punto.
(D) S è un cono con vertice in (1, 0, 0).
2.4. Rette, piani, sfere e circonferenze 37
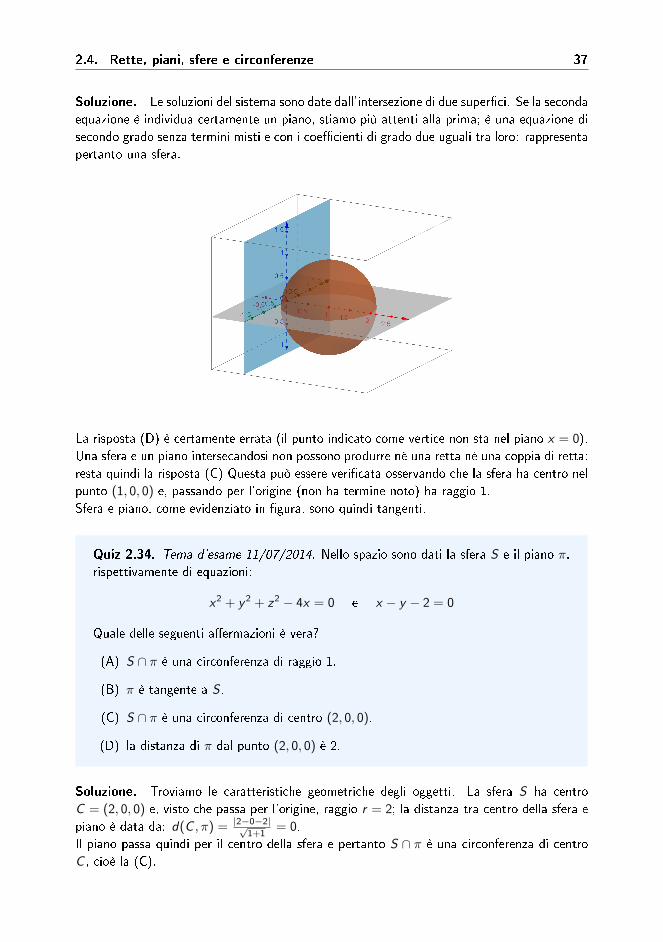
Soluzione. Le soluzioni del sistema sono date dall'intersezione di due super�ci. Se la secondaequazione è individua certamente un piano, stiamo più attenti alla prima; è una equazione disecondo grado senza termini misti e con i coe�cienti di grado due uguali tra loro: rappresentapertanto una sfera.
La risposta (D) è certamente errata (il punto indicato come vertice non sta nel piano x = 0).Una sfera e un piano intersecandosi non possono produrre né una retta né una coppia di retta:resta quindi la risposta (C) Questa può essere veri�cata osservando che la sfera ha centro nelpunto (1, 0, 0) e, passando per l'origine (non ha termine noto) ha raggio 1.Sfera e piano, come evidenziato in �gura, sono quindi tangenti.
Quiz 2.34. Tema d'esame 11/07/2014. Nello spazio sono dati la sfera S e il piano π,rispettivamente di equazioni:
x2 + y2 + z2 − 4x = 0 e x − y − 2 = 0
Quale delle seguenti a�ermazioni è vera?
(A) S ∩ π è una circonferenza di raggio 1.
(B) π è tangente a S .
(C) S ∩ π è una circonferenza di centro (2, 0, 0).
(D) la distanza di π dal punto (2, 0, 0) è 2.
Soluzione. Troviamo le caratteristiche geometriche degli oggetti. La sfera S ha centroC = (2, 0, 0) e, visto che passa per l'origine, raggio r = 2; la distanza tra centro della sfera epiano è data da: d(C , π) = |2−0−2|√
1+1= 0.
Il piano passa quindi per il centro della sfera e pertanto S ∩ π è una circonferenza di centroC , cioè la (C).

38 Capitolo 2. Quiz d'esame
2.5 Autovalori e autovettori
Quiz 2.35. Tema d'esame 26/06/2015. Data la matrice
1 0 2
0 1 1
2 1 1
, quale delle
seguenti a�ermazioni è corretta?
(A) A è diagonalizzabile.
(B) det(A) = 0.
(C) dim(ker(A)) > 1.
(D) Il vettore v t , dove v = (1, 1, 1), è un autovettore.
Soluzione. Dal momento che la matrice è simmetrica, grazie al Teorema Spettrale possiamoconcludere che è sicuramente diagonalizzabile e al risposta corretta è la (A).
La (B) si esclude con un calcolo diretto: det(B) = −4. Questo esclude anche la (C): infattiavendo determinante non nullo, la matrice è invertibile e l'applicazione lineare associata èiniettiva (e il nucleo si riduce al vettore nullo).
In�ne si ha che Av t = (3, 2, 4)t che esclude la (D).
Quiz 2.36. Tema d'esame 06/02/2015. Sia A ∈ Rn×n e v ∈ Rn. Si indichil'a�ermazione corretta.
(A) Se Av = v, allora v è un autovettore non nullo di A.
(B) Se v è un autovettore di A, allora Av = v.
(C) Se Av = 0, allora v non è un autovettore di A.
(D) Se v è un autovettore di A, allora 3v è un autovettore di A.
Soluzione. Valutiamo le varie opzioni. La (A) non è vera in generale: prendendo v = 0
l'ipotesi sarebbe veri�cata, ma il vettore sarebbe nullo. La (B) è vera solo se v fosse autovettoredi autovalore 1, ma questo non è speci�cato. La (C) è falsa, poiché in tal caso v è autovettoredi autovalore 0.
La (D) è corretta, infatti:
A · (3v) = 3(A · v) = 3(λv) = (3λ)v = λ(3v),
ed è quindi autovettore dello stesso autovalore.

2.5. Autovalori e autovettori 39
Quiz 2.37. Tema d'esame 18/09/2014. Data la matrice:
A =
0 0 0
2 2 2
3 3 3
si indichi l'a�ermazione corretta.
(A) il rango di A è 2.
(B) A è diagonalizzabile.
(C) 1 è autovalore di A.
(D) A ha un solo autospazio.
Soluzione. Osserviamo che la prima riga è nulla mentre la seconda e la terza riga sonoproporzionali. Pertanto il rango, pari al numero di righe linearmente indipendenti, è 1 e la (A)è falsa. Al �ne di discutere le successive, troviamo gli autovalori associati ad A.
pA(λ) = det
0− λ 0 0
2 2− λ 2
3 3 3− λ
= −λ[(2− λ)(3− λ)− 6] = −λ2(λ− 5).
Pertanto abbiamo due autovalori distinti e, in particoalre, λ = 0 con molteplicità algebricadoppia. Escludiamo quindi la (C) e la (D).
Resta vera la (B) che possiamo anche dimostrare direttamente. Dal momento che vale la(1.11), siamo sicuri che l'autospazio associato a λ = 5 abbia dimensione 1. Osserviamo cheE0(A) coincide con ker(A); dal momento che il numero di colonne linearmente indipendentidi A è 1, si ha che la dimensione del nucleo (e quindi dell'autospazio) è 2: la molteplicitàalgebrica e quella geometrica coincidono e la matrice è diagonalizzabile.
Quiz 2.38. Tema d'esame 11/07/2014. Sia A ∈ R3×3 una arbitraria matrice realequadrata con polinomio caratteristico −t3 − t. Quale delle seguenti a�ermazioni ènecessariamente vera?
(A) A è diagonalizzabile sui reali.
(B) A non è simmetrica.
(C) 1 è autovalore di A.
(D) A è invertibile.

40 Capitolo 2. Quiz d'esame
Soluzione. Per determinare gli autovalori di A è su�ciente fattorizzare il polinomio carat-teristico; scomponendo in fattori otteniamo:
pA(t) = −t(t2 + 1).
Abbiamo pertanto un solo autovalore reale t1 = 0 con molteplicità algebrica (e quindi anchegeometrica) uguale ad 1.Alla luce di questo possiamo escludere la (D) poiché 0 è autovalore, per cui det(A) = 0.Escludiamo la (C) poiché 1 non è radice del polinomio caratteristico; escludiamo (A) poichénon avendo autovalori per cui la somma delle loro molteplicità è 3, la matrice non può esserediagonalizzata.Resta vera la (A), d'altra parte, se fosse simmetrica, per il Teorema Spettrale, avrebbeautovalori tutti reali.
Quiz 2.39. Tema d'esame 11/07/2014. È dato un endomor�simo f di R3 tale che:
f
1
0
0
= f
0
1
0
.
Si indichi l'a�ermazione corretta.
(A) L'immagine di f ha dimensione 3.
(B) f è suriettivo.
(C) f ha un autovalore nullo.
(D) il nucleo di f ha dimensione 0.
Soluzione. Traducendo in termini matriciali l'informazione fornita, la matrice associata adf rispetto alle basi canoniche di R3 ha le prime due colonne coincidenti.Alla luce di questo escludiamo la (A) poiché l'immagine sarà generata al più da due colonne li-nearmente indipendenti ed escludiamo la (B) per un motivo analogo. D'altra parte la dimensio-ne del nucleo dipende da quella dell'immagine, ma si ha comunque dim ker f = 3−dim im f 6 1
e la (D) è falsa.Resta vera la (C) dal momento che, avendo due colonne linearmente dipendenti, il rango dellamatrice è minore di 3 e il suo determinante si annulla: 0 è pertanto radice del polinomiocaratteristico.

2.6. Coniche e quadriche 41
Quiz 2.40. Tema d'esame 11/07/2014. Sia data la forma quadratica
q(x , y) = 2x2 − 2xy + 3y2.
Quale delle seguenti a�ermazioni è vera?
(A) q(1, 2) < 0.
(B) q(x , y) è de�nita positiva.
(C) q(x , y) non è de�nita.
(D) esiste in R2 un punto (a, b) 6= (0, 0) tale che q(a, b) = 0.
Soluzione. Per testare la (A) è su�ciente provare a sostituire: q(1, 2) = 2− 4 + 12 > 0 equindi è falsa.Per discutere le altre opzioni, scriviamo la matrice associata a q e troviamone gli autovalori.
A = Aq =
(2 −1−1 3
); pA(λ) = det
(2− λ −1−1 3− λ
)= λ2 − 7λ+ 5.
Provando a trovare esplicitamente o utilizzando la Regola di Cartesio, notiamo come entrambigli autovalori sono positivi; il Fatto 1.10 ci assicura che la forma è de�nita positiva, cioè la(B).
2.6 Coniche e quadriche
Quiz 2.41. Tema d'esame 10/07/2015. La curva L : x2 + 4y2 − 4xy + 4y = 0 delpiano Oxy rappresenta:
(A) una ellisse.
(B) una iperbola.
(C) una parabola.
(D) una coppia di rette.
Soluzione. L'equazione di secondo grado individua una conica; scriviamone le matrici asso-ciate:
A =
(1 −2−2 4
)e B =
1 −2 0
−2 4 2
0 2 0
.
42 Capitolo 2. Quiz d'esame
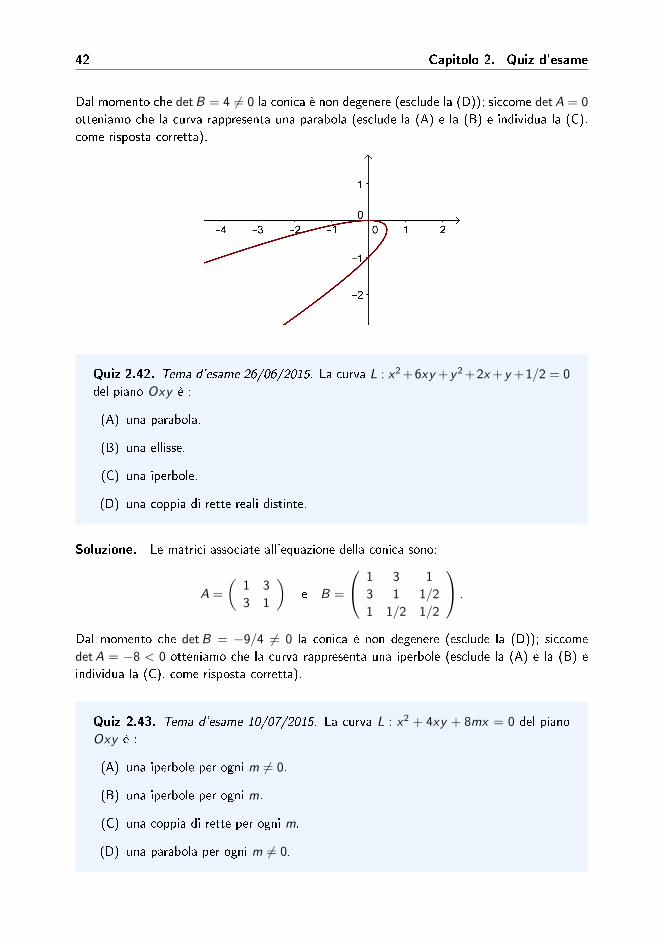
Dal momento che detB = 4 6= 0 la conica è non degenere (esclude la (D)); siccome detA = 0
otteniamo che la curva rappresenta una parabola (esclude la (A) e la (B) e individua la (C).come risposta corretta).
Quiz 2.42. Tema d'esame 26/06/2015. La curva L : x2+6xy +y2+2x +y +1/2 = 0
del piano Oxy è :
(A) una parabola.
(B) una ellisse.
(C) una iperbole.
(D) una coppia di rette reali distinte.
Soluzione. Le matrici associate all'equazione della conica sono:
A =
(1 3
3 1
)e B =
1 3 1
3 1 1/2
1 1/2 1/2
.
Dal momento che detB = −9/4 6= 0 la conica è non degenere (esclude la (D)); siccomedetA = −8 < 0 otteniamo che la curva rappresenta una iperbole (esclude la (A) e la (B) eindividua la (C). come risposta corretta).
Quiz 2.43. Tema d'esame 10/07/2015. La curva L : x2 + 4xy + 8mx = 0 del pianoOxy è :
(A) una iperbole per ogni m 6= 0.
(B) una iperbole per ogni m.
(C) una coppia di rette per ogni m.
(D) una parabola per ogni m 6= 0.

2.6. Coniche e quadriche 43
Soluzione. Come primo passaggio, scriviamone le matrici associate all'equazione della co-nica:
A =
(1 2
2 0
)e B =
1 2 4m
2 0 0
4m 0 0
.
Dal momento che detB = 0 per ogni valore di m, la conica è degenere. Osservando chedetA < 0 possiamo concludere che la conica in questione è di tipo iperbolico: le soluzionidell'equazione rappresentano quindi, per ogni valore di m, una coppia di rette e la rispostacorretta è la (C).Ad ulteriore conferma, possiamo osservare che l'equazione si può riscrivere come: x · (x +
4y + 8m) = 0; le soluzioni sono quindi date dalle due rette
x = 0; x + 4y + 8m = 0.
Quiz 2.44. Tema d'esame 10/07/2015. Il sistema di due equazioni{x2 + y2 = 1
x = y
rappresenta nello spazio R3:
(A) una coppia di rette sghembe.
(B) un cilindro parallelo all'asse z .
(C) una coppia di rette parallele.
(D) un cono.
Soluzione. Dal momento che ci troviamo in uno spazio tridimensionale (attenzione al testo!)il problema ci chiede di intersecare due super�ci.
44 Capitolo 2. Quiz d'esame
La prima equazione, dal momento che manca la z , rappresenta un cilindro che ha comedirettrice la circonferenza di centro l'origine e raggio 1 nel piano z = 0; l'asse del cilindroè quindi rappresentato dall'asse z . La seconda equazione rappresenta un piano passante perl'asse z .L'intersezione delle due super�ci è quindi l'unione di due rette (generatrici) parallele.La risposta corretta è quindi la (C).
2.7 Funzioni un più variabili
Quiz 2.45. Tema d'esame 18/09/2014. Sia dato l'insieme:
D = {(x , y) ∈ R2 | x2 − y2 6 1}.
Quale delle seguenti a�ermazioni è vera.
(A) D è aperto.
(B) D è limitato.
(C) Il punto P = (0, 1) è esterno a D.
(D) Il punto P = (0, 1) è interno a D.
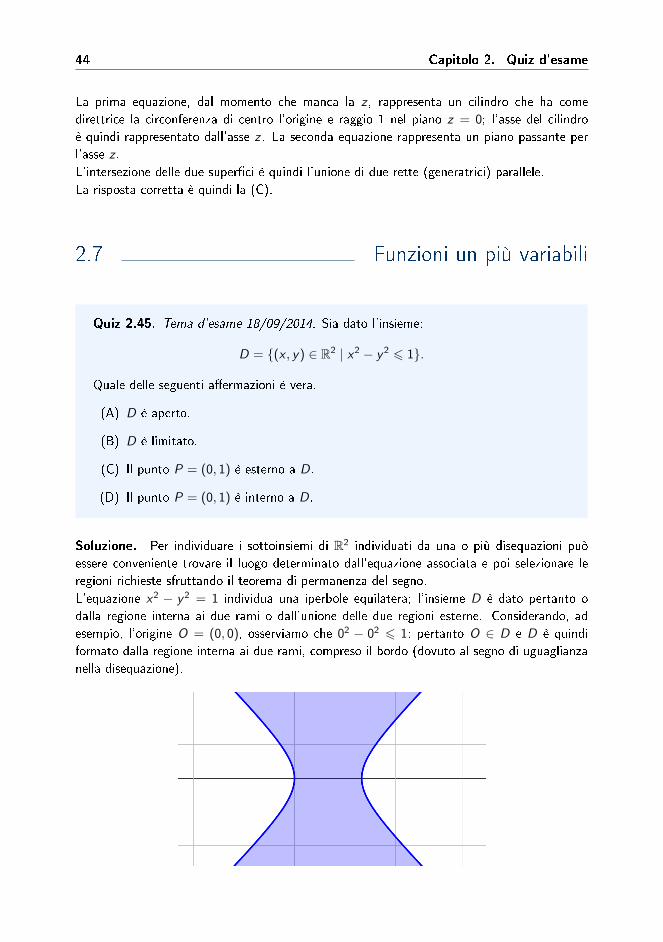
Soluzione. Per individuare i sottoinsiemi di R2 individuati da una o più disequazioni puòessere conveniente trovare il luogo determinato dall'equazione associata e poi selezionare leregioni richieste sfruttando il teorema di permanenza del segno.L'equazione x2 − y2 = 1 individua una iperbole equilatera; l'insieme D è dato pertanto odalla regione interna ai due rami o dall'unione delle due regioni esterne. Considerando, adesempio, l'origine O = (0, 0), osserviamo che 02 − 02 6 1; pertanto O ∈ D e D è quindiformato dalla regione interna ai due rami, compreso il bordo (dovuto al segno di uguaglianzanella disequazione).
2.7. Funzioni un più variabili 45
Valutiamo ora le varie proposte. (A) non è vera poiché l'insieme D contiene il suo bordo;questa conclusione è conseguenza della disuguaglianza non stretta nella de�nizione di D.(B) non è vera poiché tutti i punti dell'asse y del tipo (0, y) ∈ D e l'asse y è un insieme nonlimitato.(C) è falsa: infatti 02 − 12 6 1 e P ∈ D.(D) è in�ne vera poiché le coordinate di P soddisfano la disuguaglianza stretta nella de�nizionedi D ed è quindi possibile trovare un intorno aperto di P tutto contenuto in D.
Quiz 2.46. Tema d'esame 10/07/2015. Sia f : R2 → R la funzione f : (x , y) 7→ xy−1.Stabilire quale delle seguenti a�ermazioni è quella corretta.
(A) Ha un massimo;
(B) ha un minimo;
(C) ha derivata nulla in P = (3, 1) nella direzione i+k√2;
(D) ha un solo punto stazionario.
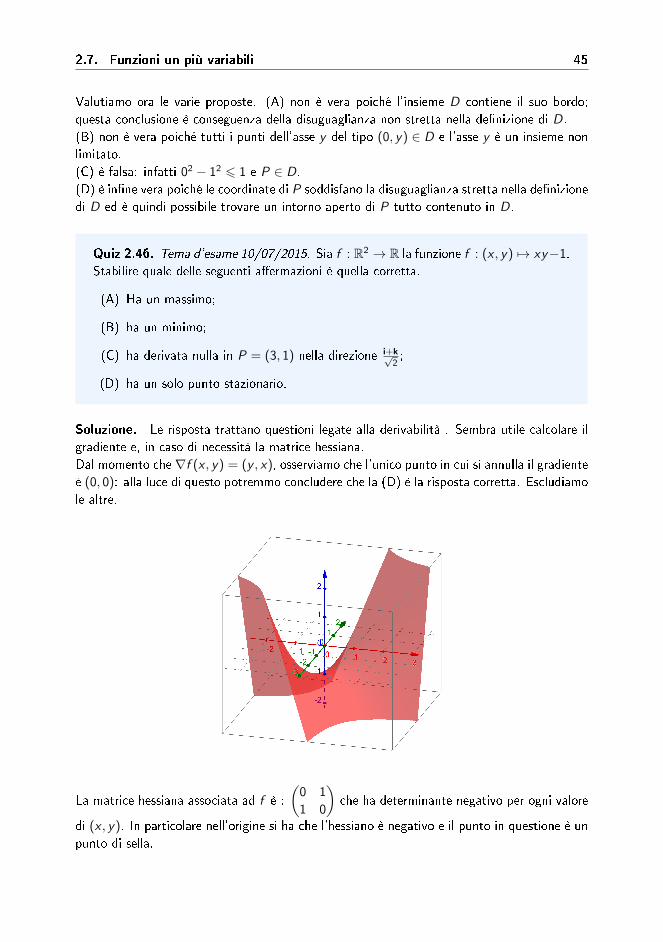
Soluzione. Le risposta trattano questioni legate alla derivabilità . Sembra utile calcolare ilgradiente e, in caso di necessità la matrice hessiana.Dal momento che ∇f (x , y) = (y , x), osserviamo che l'unico punto in cui si annulla il gradienteè (0, 0): alla luce di questo potremmo concludere che la (D) è la risposta corretta. Escludiamole altre.
La matrice hessiana associata ad f è :
(0 1
1 0
)che ha determinante negativo per ogni valore
di (x , y). In particolare nell'origine si ha che l'hessiano è negativo e il punto in questione è unpunto di sella.

46 Capitolo 2. Quiz d'esame
Quiz 2.47. Tema d'esame 10/07/2015. Data la funzione f (x , y) = (x + y)2 − 2x ,quale delle seguenti a�ermazione è corretta?
(A) Ha matrice jacobiana di rango 2 ovunque.
(B) Ha in�niti punti di minimo.
(C) La super�cie S : z = f (x , y) ha piano tangente α : z + 2x = 0 nell'origine.
(D) Ha matrice hessiana identicamente nulla.
Soluzione. Al �ne di selezionare l'a�ermazione corretta, pare utile trovare gradiente ematrice hessiana:
∇f (x , y) = (2x + 2y − 2, 2x + 2y); Hf (x , y) =
(2 2
2 2
).
Osserviamo come la (A) non può essere vera, dal momento che la jacobiana coincide in questocaso col gradiente che non può avere rango maggiore di 1; la (D) è evidentemente falsa.Dal momento che il gradiente non si annulla mai, proviamo a veri�care la risposta (C). Il pianotangente nell'origine ha infatti equazione:
z = f (0, 0) +∂f
∂x(0, 0) · (x − 0) +
∂f
∂y(0, 0)(y − 0); cioè : z = 0− 2x + 0y .
Quiz 2.48. Tema d'esame 26/06/2015. Data la funzione f (x , y) = x log(y), qualedelle seguenti a�ermazione è corretta?
(A) Il punto (0, 1) è un punto stazionario per f .
(B) dom(f ) = R2 \ {(0, 0)}.
(C) La funzione è limitata.
(D) La funzione è continua in R2.
Soluzione. Osserviamo innanzitutto che dom(f ) = {(x , y) ∈ R2 | y > 0}; questo escludela (B) e la (D). Dal momento che f è il prodotto di due funzioni non limitate, anche f nonè limitata: �ssiamo ad esempio y = y0 6= 1, per x → ∞ si ha che limx→∞ f (x , y0) = ∞ equesto esclude la (C).Controlliamo esplicitamente la (A). Si ha che
∇f (x , y) = (log(y), x/y);
pertanto ∇f = (0, 0) se e solo se (x , y) = (0, 1), come richiesto.

2.7. Funzioni un più variabili 47
Quiz 2.49. Tema d'esame 18/09/2014. Si consideri la funzione f (x , y) = ex2+y2−1.Si indichi l'a�ermazione corretta.
(A) (0, 0) è un punto di sella per f .
(B) (0, 0) è un punto di minimo per f .
(C) f non ha punti stazionari.
(D) f ha almeno un punto di massimo relativo.
Soluzione. Dal momento che il dominio della funzione è tutto R2, ogni risultato ottenutosarà accettabile. Calcoliamo il gradiente e troviamo gli eventuali punti in cui si annulla:
∇f (x , y) =(
ex2+y2−1(2x), ex2+y2−1(2y));
l'unico punto in cui si annulla è l'origine O = (0, 0). per classi�care il punto trovato, calcoliamol'hessiana:
Hf (x , y) =
ex2+y2−1(2x)2 + ex2+y2−1 · 2 ex2+y2−1(2y)(2x)
ex2+y2−1(2x)(2y) ex2+y2−1(2y)2 + ex2+y2−1 · 2
.
Nel punto (0, 0) troviamo che Hf (0, 0) =
(2e−1 0
0 2e−1
)che ha determinante positivo;
dal momento che entrambi i termini sulla diagonale sono positivi, il punto (0, 0) è un puntodi minimo.
Quiz 2.50. Tema d'esame 06/02/2015. Si consideri la funzione f (x , y) = cos x · esin y .Si indichi l'a�ermazione corretta.
(A) La funzione f è limitata.
(B) La funzione f non è continua in (0, 0).
(C) Il punto (0, 0) è un punto critico di f .
(D) La funzione f non possiede punti critici.
Soluzione. Dal momento che f (x , y) = cos(x) · sin(?), possiamo a�ermare che la funzioneè sicuramente limitata in quanto prodotto di due funzioni limitate e la risposta corretta è la(A).A scopo didattico, per escludere le altre risposte, calcoliamo il gradiente della funzione:
∇f (x , y) =(− sin(x) · esin y , cos x · esin y · cos y
).

48 Capitolo 2. Quiz d'esame
Possiamo quindi osservare come la funzione non abbia un punto critico in (0, 0) poiché esistonocontinue le derivate e il gradiente non vi si annulla; d'altra parte ogni qualvolta sin x = 0 ecos y = 0 otteniamo un punto critico.
Quiz 2.51. Tema d'esame 06/02/2015. Sia P ∈ R2 un punto di massimo locale diuna funzione f : R2 → R. Si indichi l'a�ermazione corretta.
(A) f (P) > f (Q) per ogni Q ∈ R2.
(B) Esiste un intorno IP di P tale che f (Q) 6 f (P) per ogni Q ∈ IP .
(C) f (P) < f (Q) per ogni Q ∈ R2.
(D) La funzione è di�erenziabile in P e il di�erenziale nel punto è nullo.
Soluzione. La de�nizione corretta di massimo locale è riportata nella risposta (B): la localitàdel massimo è giusti�cata dall'esistenza di un intorno e non dalla richiesta della disuguaglianzaveri�cata su tutto R2 (o sul dominio della funzione).A scopo didattico, escludiamo le altre risposte. La (A) si applica al caso globale e non locale.La (C) si applicherebbe al caso del minimo e non del massimo. La di�erenziabilità coinvoltanella (D) non è condizione necessaria per il massimo locale; si pensi ad esempio alla punta diun cono: si ha un punto di massimo locale, ma non si ha di�erenziabilità (non c'è il pianotangente).

2.7. Funzioni un più variabili 49
Quiz 2.52. Tema d'esame 11/07/2014. Sia data la funzione f (x , y) = 2x + y . Qualedelle seguenti a�ermazione è vera?
(A) Il gra�co di f (x , y) è un paraboloide.
(B) Il punto (1, 2, 0) appartiene al gra�co di f (x , y).
(C) f (x , y) non è di�erenziabile nel punto (0, 0).
(D) ∇f (2, 1) = ∇f (1, 2).
Soluzione. Il gra�co di f (x , y) è l'insieme dei punto di R3 tali che z = 2x + y ; si trattapertanto di un piano. Questo esclude direttamente la (A) e la (C).Dal momento che 2 · 1 + 1 · 2 6= 0 anche la (B) è falsa.La (D) è vera in quanto la direzione ortogonale al piano tangente al gra�co (cioè , in questocaso, il piano stesso) è la stessa per ogni punto. Esplicitamente abbiamo che∇f (x , y) = (2, 1)
è costante e quindi uguale in ogni suo punto.
Quiz 2.53. Tema d'esame 11/07/2014. Data la funzione
f (x , y) = x cos(y2),
si indichi l'a�ermazione corretta.
(A) f non possiede punti critici.
(B) Il punto(0,√3π/2
)è critico per f .
(C) Il piano tangente al gra�co di f nel punto (0, π/2) è x − y + z = 0.
(D) Il piano tangente al gra�co di f nel punto (0, π/2) è z − 1 = 0.
Soluzione. Le a�ermazioni coinvolgono il gradiente della funzione
∇f (x , y) =(cos(y2),−x · sin(y2) · 2y
).
Escludiamo la (A) poichè tutti i punti con x = 0 e che annullano cos(y2) sono critici in quantoannullano il gradiente.
Testiamo la (B): ∇f(0,√
3π/2)= (cos(3π/2), 0) = (0, 0). L'a�ermazione corretta è quindi
la (B).Al �ne di escludere esplicitamente le altre opzioni, calcoliamo il piano tangente nel punto(0, π/2). Al �ne di conoscere i coe�cienti, calcoliamo il valore delle derivate parziali nelpunto richiesto
∂f
∂x(0, π/2) = cos(π2/4);
∂f
∂y(0, π/2) = 0.

50 Capitolo 2. Quiz d'esame
Il piano passerà poi per (0, π/2, f (0, π/2)) = (0, π/2, 0) e avrà pertanto equazione:
z = cos(π2/4) · (x − 0) + 0 · (y − π/2); ⇒ z = cos(π2/4)x ,
che esclude la (C) e la (D).
2.8 Curve e super�ci
Quiz 2.54. Tema d'esame 10/07/2015. Si consideri la curva di R3 de�nita alleequazioni parametriche
x = cos(t), y = 1, z = t2, t ∈ R.
Quali delle seguenti a�ermazioni è corretta?
(A) La curva è piana ed è contenuta nel piano α : y = 1;
(B) è contenuta nella super�cie S : y2 − z = 0;
(C) non è piana;
(D) in P = (0, 0, 0) ha retta tangente ortogonale al piano y = 0.
Soluzione. Le prime tre risposte hanno a che fare con il rapporto di inclusione tra il supportodella curva e quello di una certa super�cie. Questo accade se ogni punto del supporto dellacurva soddisfa l'equazione delle super�cie.
Questa considerazione ci permette di osservare che la (A) è la risposta corretta: per qualsiasivalore di t il punto (cos(t), 1, t2) soddisfa l'equazione y = 1. Questo non accade sostituendole equazioni parametriche in quella di S ed esclude immediatamente la (C). Inoltre il punto P
non appartiene al supporto della curva e non ha quindi senso parlare del vettore tangente inquel punto.
Quiz 2.55. Tema d'esame 26/06/2015. La curva L: x = 1− t4, y = t, z = 3t2:
(A) è piana ed è contenuta nel piano α : y − z = 0.
(B) non ha retta tangente in P = (1, 0, 0).
(C) non è piana.
(D) è contenuta nella super�cie S : x + y − 3z2 = 0.

2.8. Curve e super�ci 51
Soluzione. La prima e la quarta opzione possono essere facilmente veri�cate sostituendo lecomponenti di L nelle equazioni, rispettivamente di α e di S .
Sostituendo le componenti in α si ottiene (1− t4)− (3t2) = 0 che non è veri�cata per ognivalore di t e pertanto la (A) non è vera. Analogamente, sostituendo le componenti in S
otteniamo:
(1− t4) + (t)− 3(3t2)2 = 0;
anche in questa situazione (ad esempio per t = 0), si ha che l'equazione non è ovunquede�nita e la (D) non può essere vera.
Per testare la (B) osserviamo innanzitutto che per t = 0 si ottiene che P appartiene al supportodella curva ed ha senso quindi cercare la retta tangente. La tangente avrebbe direzione datadal vettore derivata (−4t3, 1, 6t) calcolato in 0, cioè (0, 1, 0); la retta tangente quindi esistee la B è falsa.
La risposta corretta è quindi la (C): per veri�carlo direttamente, supponiamo che esistano icoe�cienti a, b, c , d non tutti nulli di un piano ax + by + cz + d = 0 che contiene la curvaL; dovremmo avere, per ogni valore di t ∈ R che:
a(1− t4) + b(t) + c(3t2) + d = 0,
cioè che −at4 + 3ct2 + bt + a + d = 0 per ogni t; l'unico polinomio a coe�cienti reali cheassume costantemente il valore nullo per ogni t ∈ R è il polinomio nullo, pertanto otteniamoil sistema:
−a = 0
3c = 0
b = 0
a + d = 0
che ha come unica soluzione quella nulla. Non è quindi possibile trovare un piano che contienela curva.
Quiz 2.56. Tema d'esame 10/07/2015. La curva γ(t) = (t, t3, t2)
(A) è piana.
(B) è contenuta nella super�cie S : y = xz .
(C) ha versore tangente in tutti i suoi punti perpendicolare al vettore (0, 0, 1).
(D) in P = (1, 0, 0) non ha retta tangente.
Soluzione. Osserviamo subito che P non appartiene al supporto di γ e quindi la (D) è dascartare.
La curva proposta è una curva ben nota e prende il nome di cubica gobba. Le sue proiezionisui piani coordinati, come messo in evidenza in �gura, rappresentano una curva cuspidale, unaparabola e una cubica.
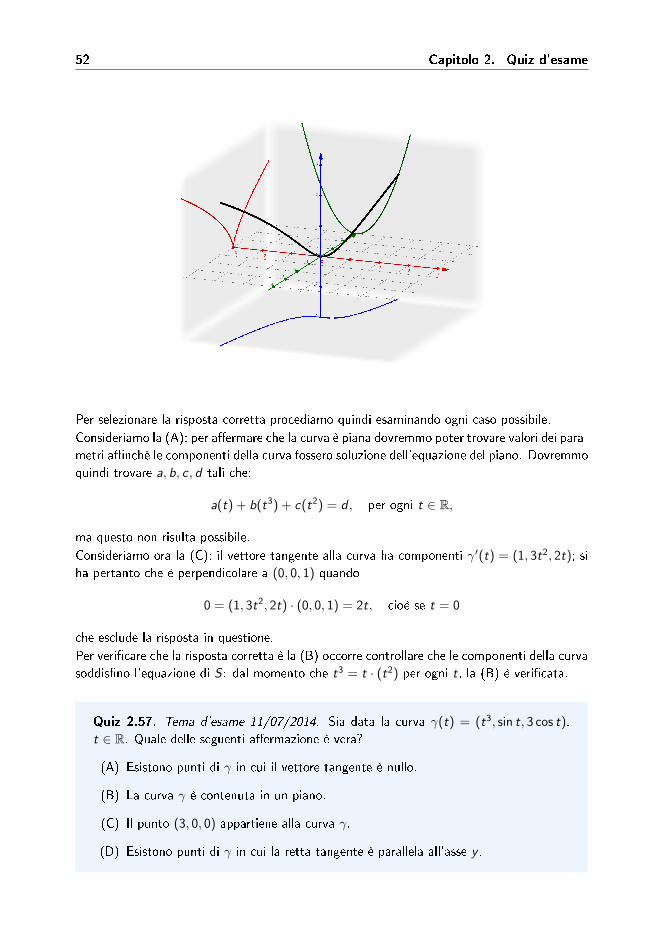
52 Capitolo 2. Quiz d'esame
Per selezionare la risposta corretta procediamo quindi esaminando ogni caso possibile.Consideriamo la (A); per a�ermare che la curva è piana dovremmo poter trovare valori dei para-metri a�nché le componenti della curva fossero soluzione dell'equazione del piano. Dovremmoquindi trovare a, b, c , d tali che:
a(t) + b(t3) + c(t2) = d , per ogni t ∈ R,
ma questo non risulta possibile.Consideriamo ora la (C): il vettore tangente alla curva ha componenti γ′(t) = (1, 3t2, 2t); siha pertanto che è perpendicolare a (0, 0, 1) quando
0 = (1, 3t2, 2t) · (0, 0, 1) = 2t, cioè se t = 0
che esclude la risposta in questione.Per veri�care che la risposta corretta è la (B) occorre controllare che le componenti della curvasoddis�no l'equazione di S : dal momento che t3 = t · (t2) per ogni t, la (B) è veri�cata.
Quiz 2.57. Tema d'esame 11/07/2014. Sia data la curva γ(t) = (t3, sin t, 3 cos t),t ∈ R. Quale delle seguenti a�ermazione è vera?
(A) Esistono punti di γ in cui il vettore tangente è nullo.
(B) La curva γ è contenuta in un piano.
(C) Il punto (3, 0, 0) appartiene alla curva γ.
(D) Esistono punti di γ in cui la retta tangente è parallela all'asse y .
2.8. Curve e super�ci 53
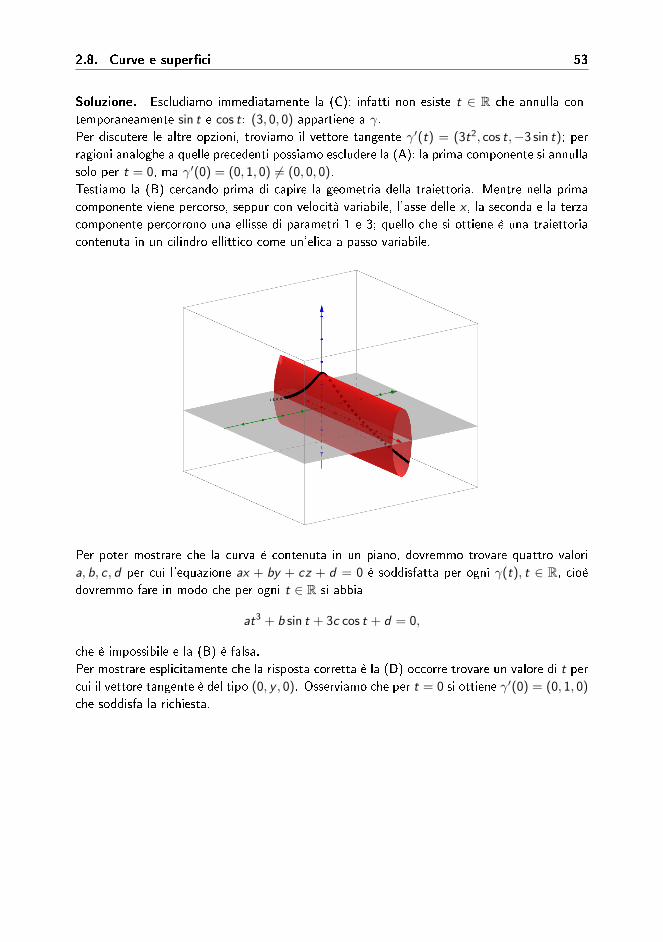
Soluzione. Escludiamo immediatamente la (C): infatti non esiste t ∈ R che annulla con-temporaneamente sin t e cos t: (3, 0, 0) appartiene a γ.Per discutere le altre opzioni, troviamo il vettore tangente γ′(t) = (3t2, cos t,−3 sin t); perragioni analoghe a quelle precedenti possiamo escludere la (A): la prima componente si annullasolo per t = 0, ma γ′(0) = (0, 1, 0) 6= (0, 0, 0).Testiamo la (B) cercando prima di capire la geometria della traiettoria. Mentre nella primacomponente viene percorso, seppur con velocità variabile, l'asse delle x , la seconda e la terzacomponente percorrono una ellisse di parametri 1 e 3; quello che si ottiene è una traiettoriacontenuta in un cilindro ellittico come un'elica a passo variabile.
Per poter mostrare che la curva è contenuta in un piano, dovremmo trovare quattro valoria, b, c , d per cui l'equazione ax + by + cz + d = 0 è soddisfatta per ogni γ(t), t ∈ R, cioèdovremmo fare in modo che per ogni t ∈ R si abbia
at3 + b sin t + 3c cos t + d = 0,
che è impossibile e la (B) è falsa.Per mostrare esplicitamente che la risposta corretta è la (D) occorre trovare un valore di t percui il vettore tangente è del tipo (0, y , 0). Osserviamo che per t = 0 si ottiene γ′(0) = (0, 1, 0)
che soddisfa la richiesta.

54 Capitolo 2. Quiz d'esame
Quiz 2.58. Tema d'esame 18/09/2014. Data la funzione
f (u, v) = (u + v , log(u + 1), uv),
sia S l'immagine di f e sia π il piano tangente ad S nel punto P = (1, 0, 0).Quale delle seguenti a�ermazione è corretta?
(A) π ha equazione y − z = 0.
(B) π ha equazione z = x + y .
(C) π non esiste.
(D) π ha equazioni u = 0, v = 1.
Soluzione. Si tratta essenzialmente di trovare l'equazione, se esiste, del piano tangente allasuper�cie parametrizzata individuata da f . Osserviamo preliminarmente che la (D) non puòessere vera in quanto due equazioni indipendenti in uno spazio tridimensionale determinanoun oggetto di dimensione 1.
Controlliamo che P ∈ S : per assicurarci che P stia nell'immagine di f occorre risolvere ilsistema:
u + v = 1
log(u + 1) = 0
uv = 0
che ammette soluzione per u = 0, v = 1 e pertanto f (0, 1) = P ∈ S .
Il piano tangente π ad S in P sarà generato dai vettori:∂f
∂u(0, 1) e
∂f
∂v(0, 1):
∂f
∂u(0, 1) =
(1,
1
u + 1, v
)(0,1)
= (1, 1, 1);∂f
∂v(0, 1) = (1, 0, u)(0,1) = (1, 0, 0).
Pertanto π è ortogonale a
det
i j k
1 1 1
1 0 0
= (0, 1,−1)
e passante per P = (1, 0, 0). Il piano è quindi dato dall'equazione:
π : 0(x − 1) + 1y − 1z = 0,
cioè la (A).
La situazione è rappresentata in �gura:
2.8. Curve e super�ci 55
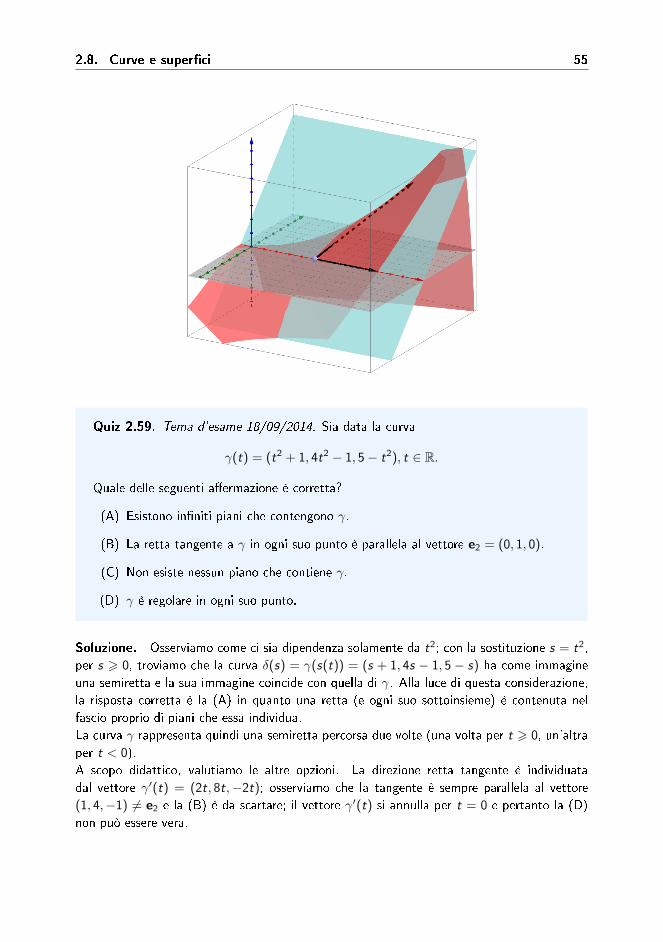
Quiz 2.59. Tema d'esame 18/09/2014. Sia data la curva
γ(t) = (t2 + 1, 4t2 − 1, 5− t2), t ∈ R.
Quale delle seguenti a�ermazione è corretta?
(A) Esistono in�niti piani che contengono γ.
(B) La retta tangente a γ in ogni suo punto è parallela al vettore e2 = (0, 1, 0).
(C) Non esiste nessun piano che contiene γ.
(D) γ è regolare in ogni suo punto.
Soluzione. Osserviamo come ci sia dipendenza solamente da t2; con la sostituzione s = t2,per s > 0, troviamo che la curva δ(s) = γ(s(t)) = (s + 1, 4s − 1, 5 − s) ha come immagineuna semiretta e la sua immagine coincide con quella di γ. Alla luce di questa considerazione,la risposta corretta è la (A) in quanto una retta (e ogni suo sottoinsieme) è contenuta nelfascio proprio di piani che essa individua.La curva γ rappresenta quindi una semiretta percorsa due volte (una volta per t > 0, un'altraper t < 0).A scopo didattico, valutiamo le altre opzioni. La direzione retta tangente è individuatadal vettore γ′(t) = (2t, 8t,−2t); osserviamo che la tangente è sempre parallela al vettore(1, 4,−1) 6= e2 e la (B) è da scartare; il vettore γ′(t) si annulla per t = 0 e pertanto la (D)non può essere vera.