PWM-ANFIS Tool Versión: 1 · Capítulo 3 Selección de Modelo La herramienta permite escoger entre...
25
β
Transcript of PWM-ANFIS Tool Versión: 1 · Capítulo 3 Selección de Modelo La herramienta permite escoger entre...
Manual de Usuario de la Herramienta:
PWM-ANFIS Tool
Versión: 1.1 β
Guillermo Bosque Perez
2 de febrero de 2012

2
Índice general
1. Pasos Previos 7
2. Introducción 8
3. Selección de Modelo 11
4. Parámetros Generales 13
5. Parámetros Antecedentes y Tasas de Aprendizaje 14
6. Obtención del Error Generalizado (GSSE) 16
7. Ficheros de Parámetros Creados con los Parámetros Escogidos 17
8. Selección de Función Objetivo y Función de Test 18
9. Ejecución del Programa 19
10.Ficheros Generados por la Herramienta una vez Finalizada la Ejecución 21
11.Observaciones Finales 23
3
Índice de �guras
2.1. Funciones de pertenencia (a) Triangulares, (b) Gaussianas. . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2. Consola de la herramienta PWM-ANFIS Tool (a) PWM-ANFIS, (b) ANFIS Genérico. . . . . . . . . . . . . . . 9
2.3. Opción de error GSSE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.1. Funciones de pertenencia y parámetros para la i-ésima entrada de un sistema ANFIS Genérico. . . . . . . . . . 11
3.2. Funciones de pertenencia y coordenadas para la i-ésima entrada de un sistema PWM-ANFIS. . . . . . . . . . . 12
5.1. Opción de tasas de aprendizaje dinámicas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
8.1. Selección de la funciones objetivo y test. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
9.1. (a) Función objetivo, (b) Función aproximada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
9.2. Funciones de pertenencia (a) iniciales, (b) aproximadas. . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
9.3. Evolución del error SSE y valor del error GSSE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
9.4. Funciones de pertenencia de variables continuas y binarias (a) Triangulares, (b) Gaussianas. . . . . . . . . . . . 20
4
Índice de cuadros
7.1. Archivo de parámetros (a) Modelo PWM-ANFIS parameters−tri, (b) Modelo ANFIS Genérico parameters−gauss. . 17
8.1. Función objetivo o de test. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
10.1. Ficheros de parámetros antecedentes para 2 variables de entrada con 4 y 5 antecedentes (a) aij , (b) bij , (c) cij . . 21
5

6
Capítulo 1
Pasos Previos
Se debe instalar el programa siguiendo los pasos que se detallan a continuación:
1. Debido a que se trabaja con programas ejecutables realizados desde Matlab, primeramente hay descomprimirel archivo ZIP MCRInstaller y ejecutar el programa MCRInstaller.exe que es quien permite trabajar con éstetipo de programas. El programa MCRInstaller.exe se corresponde con la versión de Matlab desde la que sehan obtenido los ejecutables.
2. Descomprimir el archivo ZIP Consola_PWM-ANFIS.
3. En la carpeta donde se ubiquen los archivos descomprimidos, se ejecutará la aplicación lanzando el archivoConsola_PWM-ANFIS.jar.
En la carpeta donde se haya instalado la aplicación, se encuentra el presente archivo (información.pdf) que puedeser abierto de manera autónoma.
7
Capítulo 2
Introducción
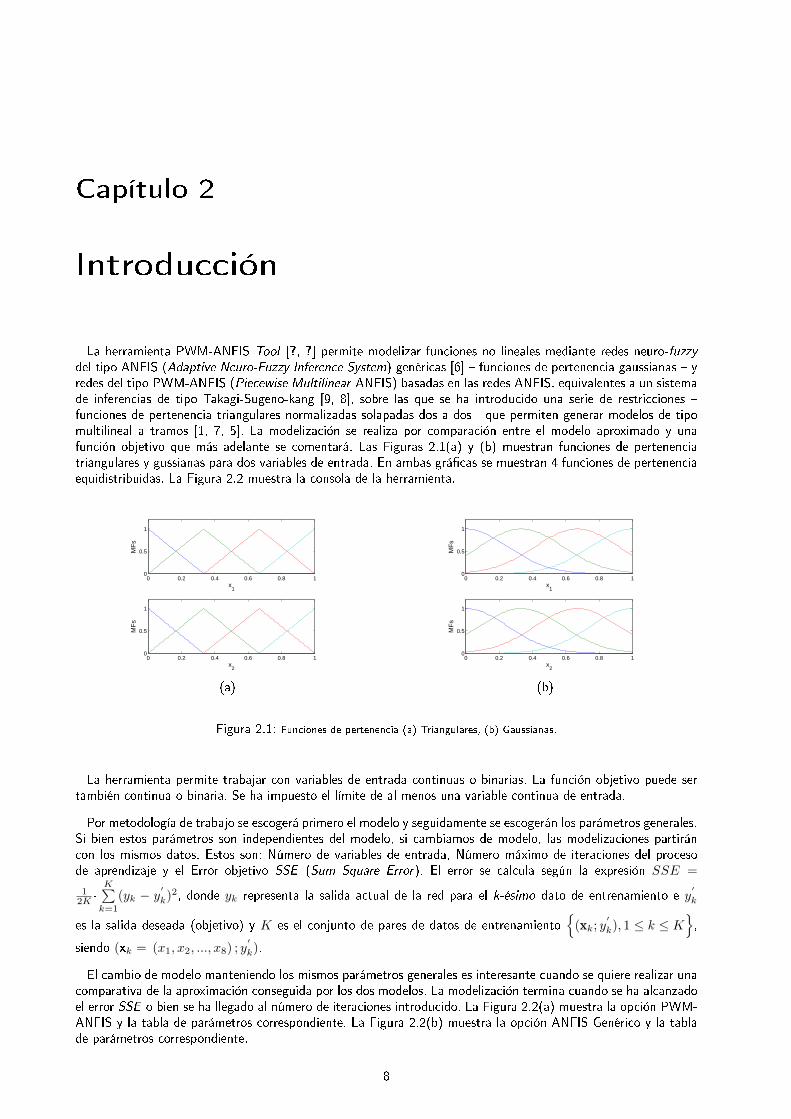
La herramienta PWM-ANFIS Tool [?, ?] permite modelizar funciones no lineales mediante redes neuro-fuzzydel tipo ANFIS (Adaptive Neuro-Fuzzy Inference System) genéricas [6] � funciones de pertenencia gaussianas � yredes del tipo PWM-ANFIS (Piecewise Multilinear ANFIS) basadas en las redes ANFIS, equivalentes a un sistemade inferencias de tipo Takagi-Sugeno-kang [9, 8], sobre las que se ha introducido una serie de restricciones �funciones de pertenencia triangulares normalizadas solapadas dos a dos - que permiten generar modelos de tipomultilineal a tramos [1, 7, 5]. La modelización se realiza por comparación entre el modelo aproximado y unafunción objetivo que más adelante se comentará. Las Figuras 2.1(a) y (b) muestran funciones de pertenenciatriangulares y gussianas para dos variables de entrada. En ambas grá�cas se muestran 4 funciones de pertenenciaequidistribuidas. La Figura 2.2 muestra la consola de la herramienta.
0 0.2 0.4 0.6 0.8 10
0.5
1
x1
MF
s
0 0.2 0.4 0.6 0.8 10
0.5
1
x2
MF
s
(a)
0 0.2 0.4 0.6 0.8 10
0.5
1
x1
MF
s
0 0.2 0.4 0.6 0.8 10
0.5
1
x2
MF
s
(b)
Figura 2.1: Funciones de pertenencia (a) Triangulares, (b) Gaussianas.
La herramienta permite trabajar con variables de entrada continuas o binarias. La función objetivo puede sertambién continua o binaria. Se ha impuesto el límite de al menos una variable continua de entrada.
Por metodología de trabajo se escogerá primero el modelo y seguidamente se escogerán los parámetros generales.Si bien estos parámetros son independientes del modelo, si cambiamos de modelo, las modelizaciones partiráncon los mismos datos. Estos son: Número de variables de entrada, Número máximo de iteraciones del procesode aprendizaje y el Error objetivo SSE (Sum Square Error). El error se calcula según la expresión SSE =
12K ·
K∑k=1
(yk − y′
k)2, donde yk representa la salida actual de la red para el k-ésimo dato de entrenamiento e y
′
k
es la salida deseada (objetivo) y K es el conjunto de pares de datos de entrenamiento{(xk; y
′
k), 1 ≤ k ≤ K},
siendo (xk = (x1, x2, ..., x8) ; y′
k).
El cambio de modelo manteniendo los mismos parámetros generales es interesante cuando se quiere realizar unacomparativa de la aproximación conseguida por los dos modelos. La modelización termina cuando se ha alcanzadoel error SSE o bien se ha llegado al número de iteraciones introducido. La Figura 2.2(a) muestra la opción PWM-ANFIS y la tabla de parámetros correspondiente. La Figura 2.2(b) muestra la opción ANFIS Genérico y la tablade parámetros correspondiente.
8
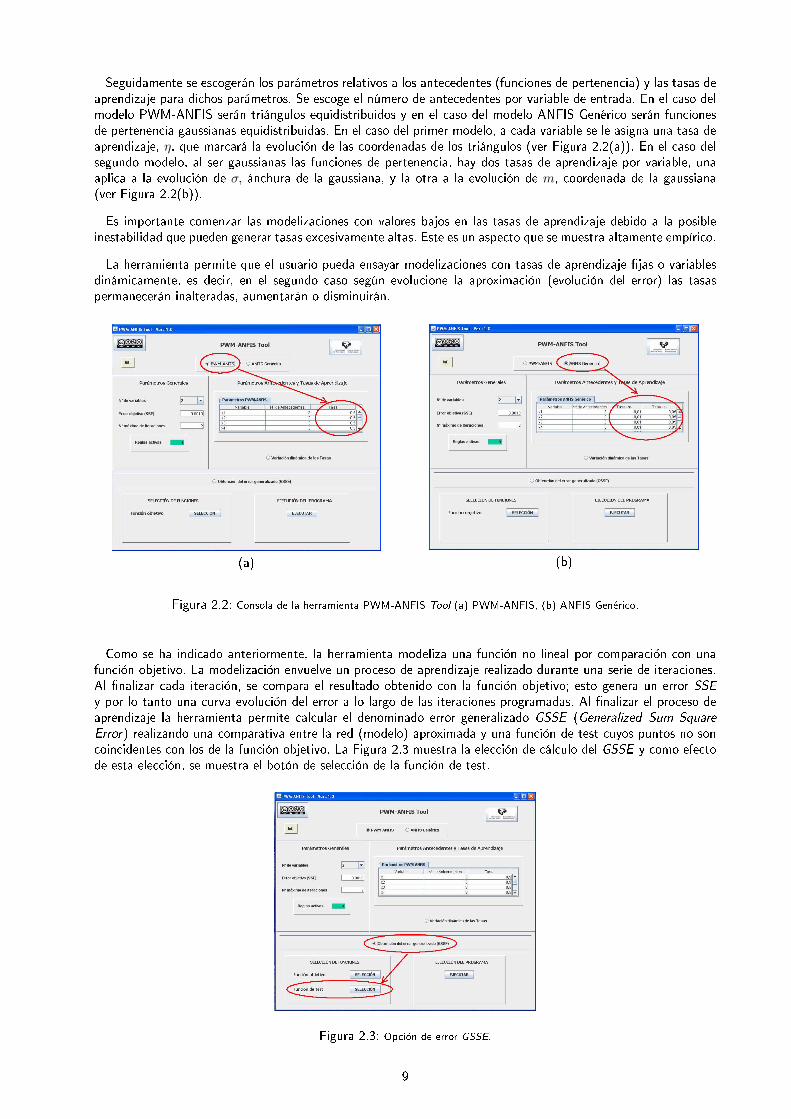
Seguidamente se escogerán los parámetros relativos a los antecedentes (funciones de pertenencia) y las tasas deaprendizaje para dichos parámetros. Se escoge el número de antecedentes por variable de entrada. En el caso delmodelo PWM-ANFIS serán triángulos equidistribuidos y en el caso del modelo ANFIS Genérico serán funcionesde pertenencia gaussianas equidistribuidas. En el caso del primer modelo, a cada variable se le asigna una tasa deaprendizaje, η, que marcará la evolución de las coordenadas de los triángulos (ver Figura 2.2(a)). En el caso delsegundo modelo, al ser gaussianas las funciones de pertenencia, hay dos tasas de aprendizaje por variable, unaaplica a la evolución de σ, ánchura de la gaussiana, y la otra a la evolución de m, coordenada de la gaussiana(ver Figura 2.2(b)).
Es importante comenzar las modelizaciones con valores bajos en las tasas de aprendizaje debido a la posibleinestabilidad que pueden generar tasas excesivamente altas. Este es un aspecto que se muestra altamente empírico.
La herramienta permite que el usuario pueda ensayar modelizaciones con tasas de aprendizaje �jas o variablesdinámicamente, es decir, en el segundo caso según evolucione la aproximación (evolución del error) las tasaspermanecerán inalteradas, aumentarán o disminuirán.
(a) (b)
Figura 2.2: Consola de la herramienta PWM-ANFIS Tool (a) PWM-ANFIS, (b) ANFIS Genérico.
Como se ha indicado anteriormente, la herramienta modeliza una función no lineal por comparación con unafunción objetivo. La modelización envuelve un proceso de aprendizaje realizado durante una serie de iteraciones.Al �nalizar cada iteración, se compara el resultado obtenido con la función objetivo; esto genera un error SSEy por lo tanto una curva evolución del error a lo largo de las iteraciones programadas. Al �nalizar el proceso deaprendizaje la herramienta permite calcular el denominado error generalizado GSSE (Generalized Sum SquareError) realizando una comparativa entre la red (modelo) aproximada y una función de test cuyos puntos no soncoincidentes con los de la función objetivo. La Figura 2.3 muestra la elección de cálculo del GSSE y como efectode esta elección, se muestra el botón de selección de la función de test.
Figura 2.3: Opción de error GSSE.
9
El paso siguiente consistirá en escoger la función objetivo y la función de test, en caso de disponer de estaúltima. Estas funciones deberán tener un formato determinado como se explicará en el Capítulo 8. Son archivoscreados por el usuario y que pueden denominarse según el criterio del usuario.
Finalmente, se procederá a la ejecución del programa que realiza la modelización y el entrenamiento de la redneuro-fuzzy. El programa es un ejecutable del programa realizado en el entorno Matlab.
10
Capítulo 3
Selección de Modelo
La herramienta permite escoger entre los modelos PWM-ANFIS y ANFIS Genérico. La Figura 2.2 muestra enel panel superior central la selección.
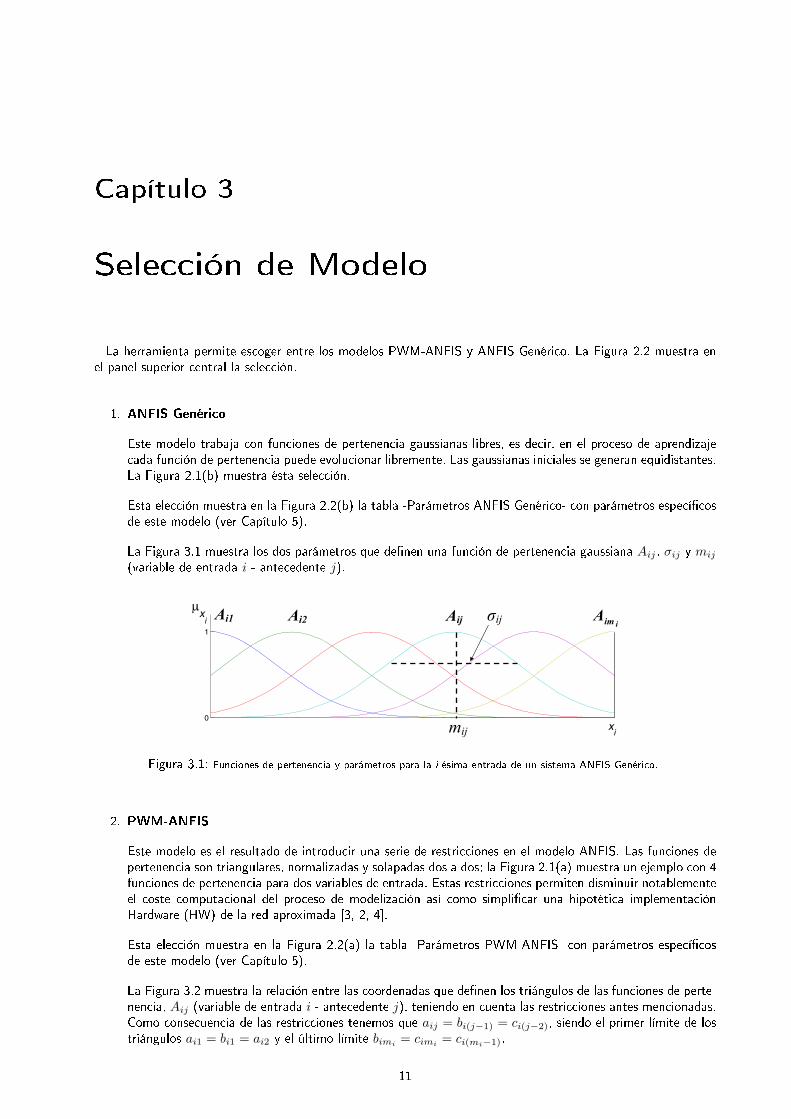
1. ANFIS Genérico
Este modelo trabaja con funciones de pertenencia gaussianas libres, es decir, en el proceso de aprendizajecada función de pertenencia puede evolucionar libremente. Las gaussianas iniciales se generan equidistantes.La Figura 2.1(b) muestra ésta selección.
Esta elección muestra en la Figura 2.2(b) la tabla -Parámetros ANFIS Genérico- con parámetros especí�cosde este modelo (ver Capítulo 5).
La Figura 3.1 muestra los dos parámetros que de�nen una función de pertenencia gaussiana Aij , σij y mij
(variable de entrada i - antecedente j).
0
1
xi
xi
ij
mij
Aij Ai2 Ai1iimA
Figura 3.1: Funciones de pertenencia y parámetros para la i-ésima entrada de un sistema ANFIS Genérico.
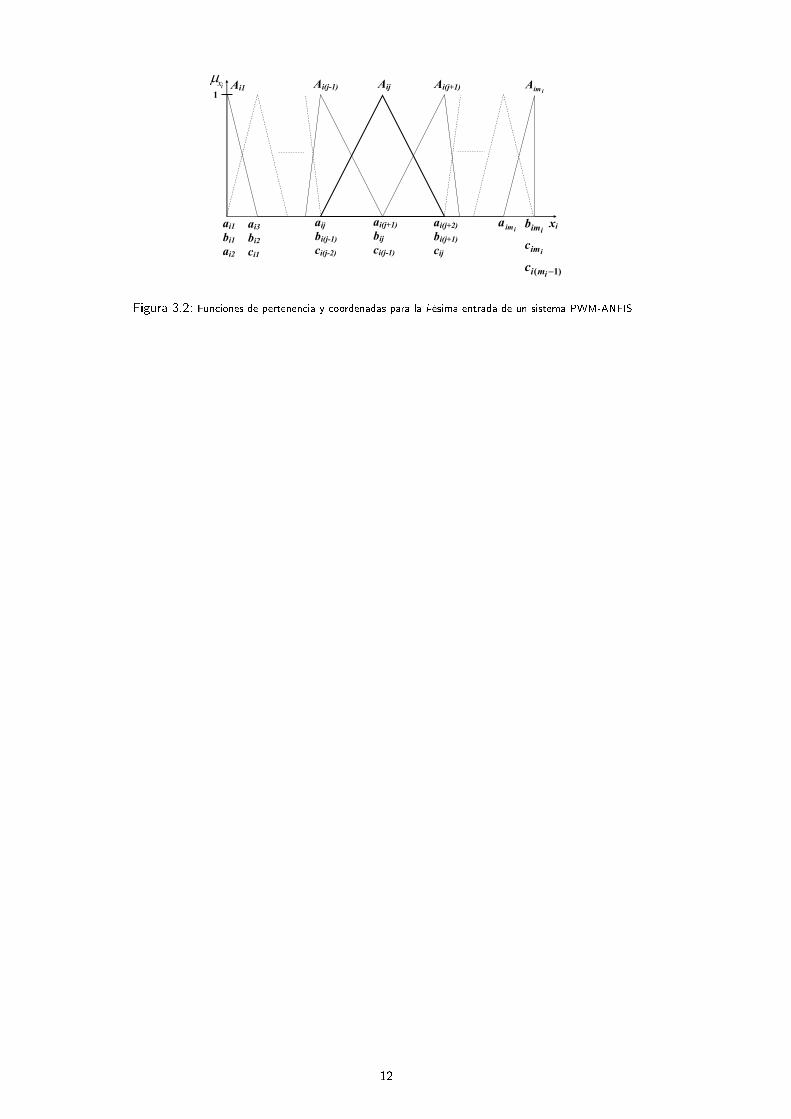
2. PWM-ANFIS
Este modelo es el resultado de introducir una serie de restricciones en el modelo ANFIS. Las funciones depertenencia son triangulares, normalizadas y solapadas dos a dos; la Figura 2.1(a) muestra un ejemplo con 4funciones de pertenencia para dos variables de entrada. Estas restricciones permiten disminuir notablementeel coste computacional del proceso de modelización así como simpli�car una hipotética implementaciónHardware (HW) de la red aproximada [3, 2, 4].
Esta elección muestra en la Figura 2.2(a) la tabla -Parámetros PWM-ANFIS- con parámetros especí�cosde este modelo (ver Capítulo 5).
La Figura 3.2 muestra la relación entre las coordenadas que de�nen los triángulos de las funciones de perte-nencia, Aij (variable de entrada i - antecedente j), teniendo en cuenta las restricciones antes mencionadas.Como consecuencia de las restricciones tenemos que aij = bi(j−1) = ci(j−2), siendo el primer límite de lostriángulos ai1 = bi1 = ai2 y el último límite bimi
= cimi= ci(mi−1).
11
xi
Aij Ai(j+1)
aijbi(j-1)ci(j-2)
ai(j+1)bijci(j-1)
ai(j+2)bi(j+1)cij
iima
Ai(j-1)
ai3bi2ci1
ix
Ai1 iimA
ai1bi1ai2
iimb
iimc
)1( !imic
1
Figura 3.2: Funciones de pertenencia y coordenadas para la i-ésima entrada de un sistema PWM-ANFIS.
12
Capítulo 4
Parámetros Generales
Los parámetros generales son válidos para los dos modelos (PWM-ANFIS y ANFIS Genérico). El panel -Parámetros Generales- muestra los tres parámetros a ajustar: Nº de variables, Error objetivo (SSE ) y Nº máximode iteraciones.
1. Nº de variables: La herramienta permite modelizar funciones desde 2 hasta 8 variables de entrada (x1, x2 , . . . , x8).Mediante una lista desplegable se realizará la selección del número de variables que intervienen en la función.
2. Error objetivo (SSE): Se introduce el mínimo error que se desea alcanzar a lo largo del proceso deentrenamiento de la red. Este error se calcula, tal y como se ha expresado en el Capítulo 2, según la
expresión siguiente: SSE = 12K ·
K∑k=1
(yk − y′
k)2, donde yk representa la salida actual de la red para el k-
ésimo dato de entrenamiento e y′
k es la salida deseada (objetivo) y K es el conjunto de pares de datos de
entrenamiento{(xk; y
′
k), 1 ≤ k ≤ K}, siendo (xk = (x1, x2, ..., x8) ; y
′
k).
3. Nºmáximo de iteraciones: Es el número de iteraciones máximo que va a realizar el algoritmo de aprendizajehasta dar por entrenada a la red. Si se alcanza el error SSE antes de �nalizar las iteraciones máximas, elproceso terminará.
13
Capítulo 5
Parámetros Antecedentes y Tasas deAprendizaje
1. Parámetros del modelo PWM-ANFIS:
a) Nº de antecedentes: Se introduce el número de antecedentes, funciones de pertenencia triangulares,por variable. El mínimo número de antecedentes es 3. Durante la ejecución, si la herramienta detectaque alguna variable es binaria, le asigna 2 antecedentes.
b) Tasas de aprendizaje: Se introduce un valor estimado inicial por cada variable. Las tasas se pueden irajustando experimentalmente por el usuario con el �n de determinar cuales son las que mejor realizanel proceso de aprendizaje. Las tasas afectan a la primera coordenada de los triángulos. La mínima tasapermitida es 0.0001.
2. Parámetros del modelo ANFIS Genérico:
a) Nº de antecedentes: Se introduce el número de antecedentes, funciones de pertenencia gaussianas,por variable. El mínimo número de antecedentes es 3. Durante la ejecución, si la herramienta detectaque alguna variable es binaria, le asigna 2 antecedentes.
b) Tasas de aprendizaje: Se introduce un valor estimado inicial por cada variable. Las tasas se pueden irajustando experimentalmente por el usuario con el �n de determinar cuales son las que mejor realizanel proceso de aprendizaje.
1) Tasas σ: Las tasas σ afectan al ancho de las gaussianas.
2) Tasas m: Las tasas m afectan a la coordenada central de las gaussianas.
En ambos parámetros, la mínima tasa permitida es 0.0001.
3. Variación dinámica de las tasas:
Las tasas pueden permenecer �jas a lo largo de un ensayo o bien pueden evolucionar dinámicamenteadaptándose al aumento o disminución del error en el transcurso de las iteraciones. La variación dinámicade las tasas presenta interés en ensayos con un número de iteraciones elevado. El programa ejecutablerealiza la revisión de las tasas cada 6 iteraciones, aumentando la tasa ligeramente si el error SSE es igual,aumentando la tasa algo más que en el caso anterior si el error SSE ha disminuido o disminuyendo la tasaligeramente si el error SSE ha aumentado. La Figura 5.1 muestra esta opción seleccionada.
14

Figura 5.1: Opción de tasas de aprendizaje dinámicas.
15
Capítulo 6
Obtención del Error Generalizado(GSSE)
Resulta interesante, una vez que el entrenamiento de la red ha �nalizado, obtener un error que re�eje el grado deaproximación obtenido comparando el modelo entrenado con puntos no incluidos en la función objetivo. Tengaseen cuenta que el entrenamiento de la red se ha realizado con respecto a los puntos objetivo. Éstos puntos de test,serán puntos situados entre los puntos objetivo.
El error obtenido recibe el nombre de Error Generalizado GSSE (Generalized Sum Square Error) y se calculade la misma forma que el error SSE teniendo en cuenta que la función objetivo, en este caso, es la función detest y el valor actual se obtiene de la red entrenada. La Figura 2.3 muestra la selección de obtención del GSSE.
Como consecuencia de esta selección, se mostrará sobre la consola el botón de selección de la función de test(ver Figura 2.3). En el Capítulo 8 se detalla la selección de la función de test.
Un modo de obtener una función de test consiste en extraer tuplas de la función objetivo siempre y cuando lafunción objetivo conste de un número razonablemente alto de puntos de entrenamiento.
16
Capítulo 7
Ficheros de Parámetros Creados conlos Parámetros Escogidos
Una vez que se han introducido todos los parámetros, la herramienta genera un �chero de parámetros que vaa ser leido por el programa ejecutable. Cada modelo genera un �chero diferente.
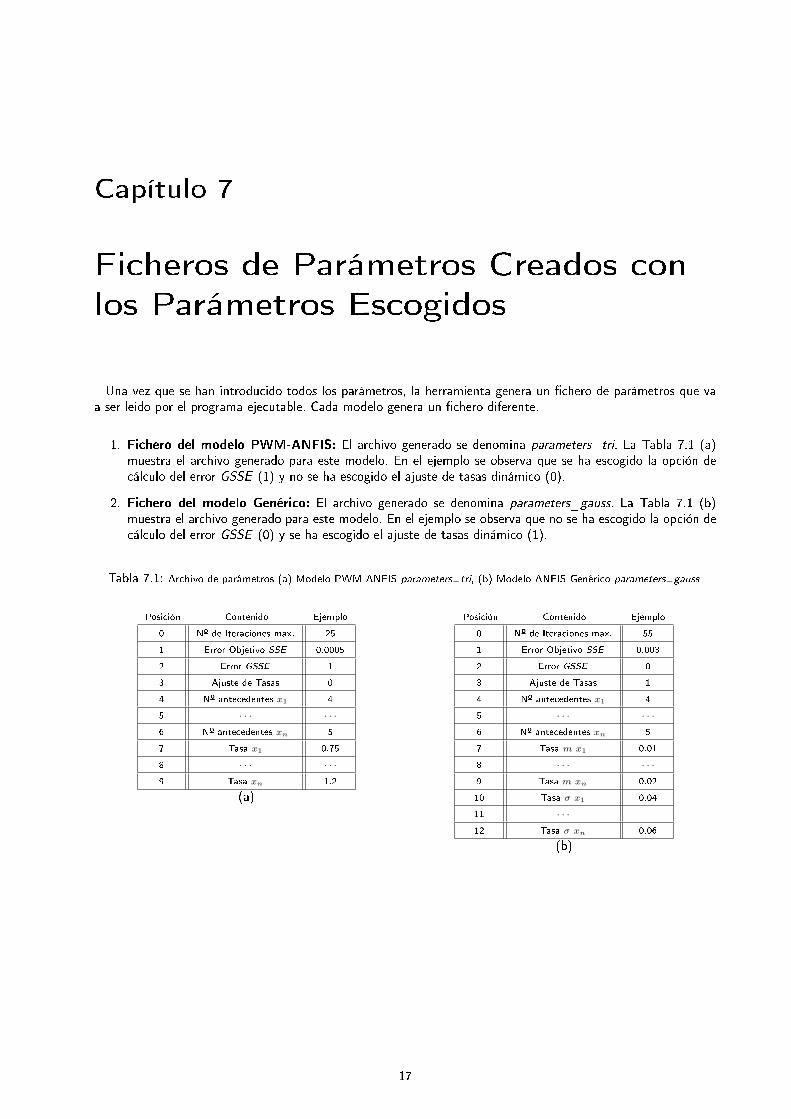
1. Fichero del modelo PWM-ANFIS: El archivo generado se denomina parameters_tri. La Tabla 7.1 (a)muestra el archivo generado para este modelo. En el ejemplo se observa que se ha escogido la opción decálculo del error GSSE (1) y no se ha escogido el ajuste de tasas dinámico (0).
2. Fichero del modelo Genérico: El archivo generado se denomina parameters_gauss. La Tabla 7.1 (b)muestra el archivo generado para este modelo. En el ejemplo se observa que no se ha escogido la opción decálculo del error GSSE (0) y se ha escogido el ajuste de tasas dinámico (1).
Tabla 7.1: Archivo de parámetros (a) Modelo PWM-ANFIS parameters−tri, (b) Modelo ANFIS Genérico parameters−gauss.
Posición Contenido Ejemplo
0 Nº de Iteraciones max. 25
1 Error Objetivo SSE 0.0005
2 Error GSSE 1
3 Ajuste de Tasas 0
4 Nº antecedentes x1 4
5 · · · · · ·
6 Nº antecedentes xn 5
7 Tasa x1 0.75
8 · · · · · ·
9 Tasa xn 1.2
(a)
Posición Contenido Ejemplo
0 Nº de Iteraciones max. 55
1 Error Objetivo SSE 0.003
2 Error GSSE 0
3 Ajuste de Tasas 1
4 Nº antecedentes x1 4
5 · · · · · ·
6 Nº antecedentes xn 5
7 Tasa m x1 0.01
8 · · · · · ·
9 Tasa m xn 0.02
10 Tasa σ x1 0.04
11 · · ·
12 Tasa σ xn 0.06
(b)
17
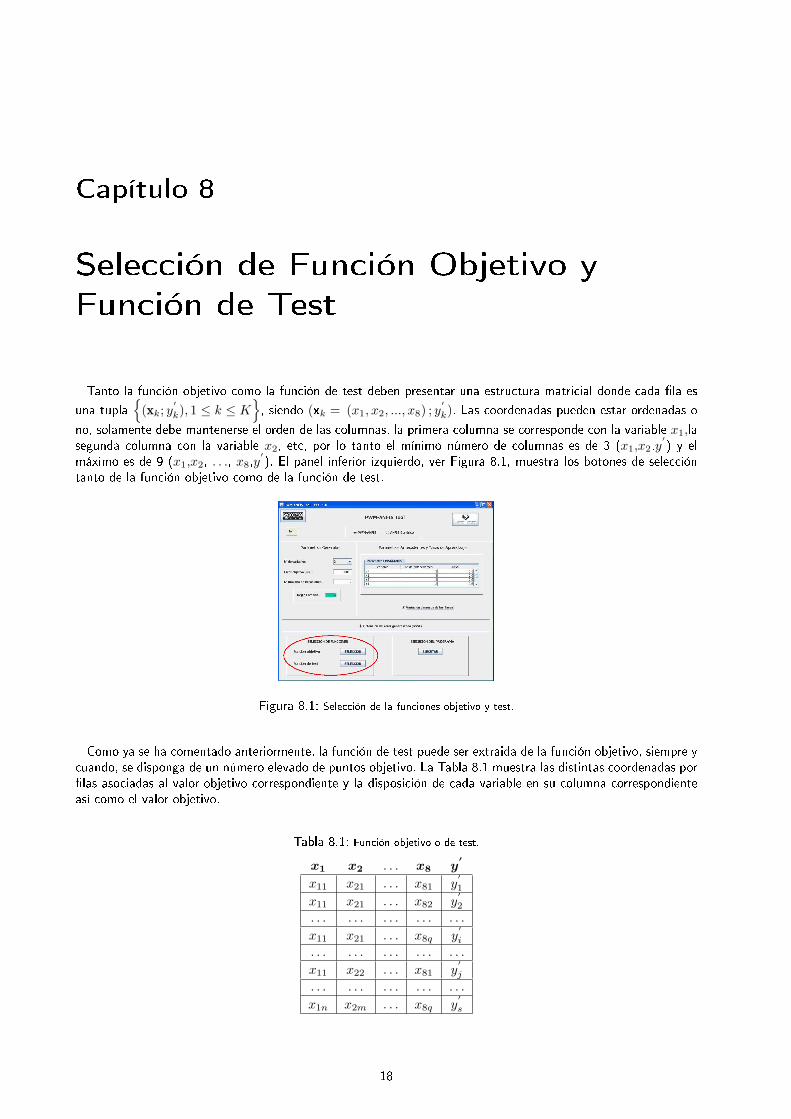
Capítulo 8
Selección de Función Objetivo yFunción de Test
Tanto la función objetivo como la función de test deben presentar una estructura matricial donde cada �la es
una tupla{(xk; y
′
k), 1 ≤ k ≤ K}, siendo (xk = (x1, x2, ..., x8) ; y
′
k). Las coordenadas pueden estar ordenadas o
no, solamente debe mantenerse el orden de las columnas, la primera columna se corresponde con la variable x1,lasegunda columna con la variable x2, etc, por lo tanto el mínimo número de columnas es de 3 (x1,x2,y
′) y el
máximo es de 9 (x1,x2, . . ., x8,y′). El panel inferior izquierdo, ver Figura 8.1, muestra los botones de selección
tanto de la función objetivo como de la función de test.
Figura 8.1: Selección de la funciones objetivo y test.
Como ya se ha comentado anteriormente, la función de test puede ser extraida de la función objetivo, siempre ycuando, se disponga de un número elevado de puntos objetivo. La Tabla 8.1 muestra las distintas coordenadas por�las asociadas al valor objetivo correspondiente y la disposición de cada variable en su columna correspondienteasí como el valor objetivo.
Tabla 8.1: Función objetivo o de test.
x1 x2 . . . x8 y′
x11 x21 . . . x81 y′
1
x11 x21 . . . x82 y′
2
. . . . . . . . . . . . . . .
x11 x21 . . . x8q y′
i
. . . . . . . . . . . . . . .
x11 x22 . . . x81 y′
j
. . . . . . . . . . . . . . .
x1n x2m . . . x8q y′
s
18
Capítulo 9
Ejecución del Programa
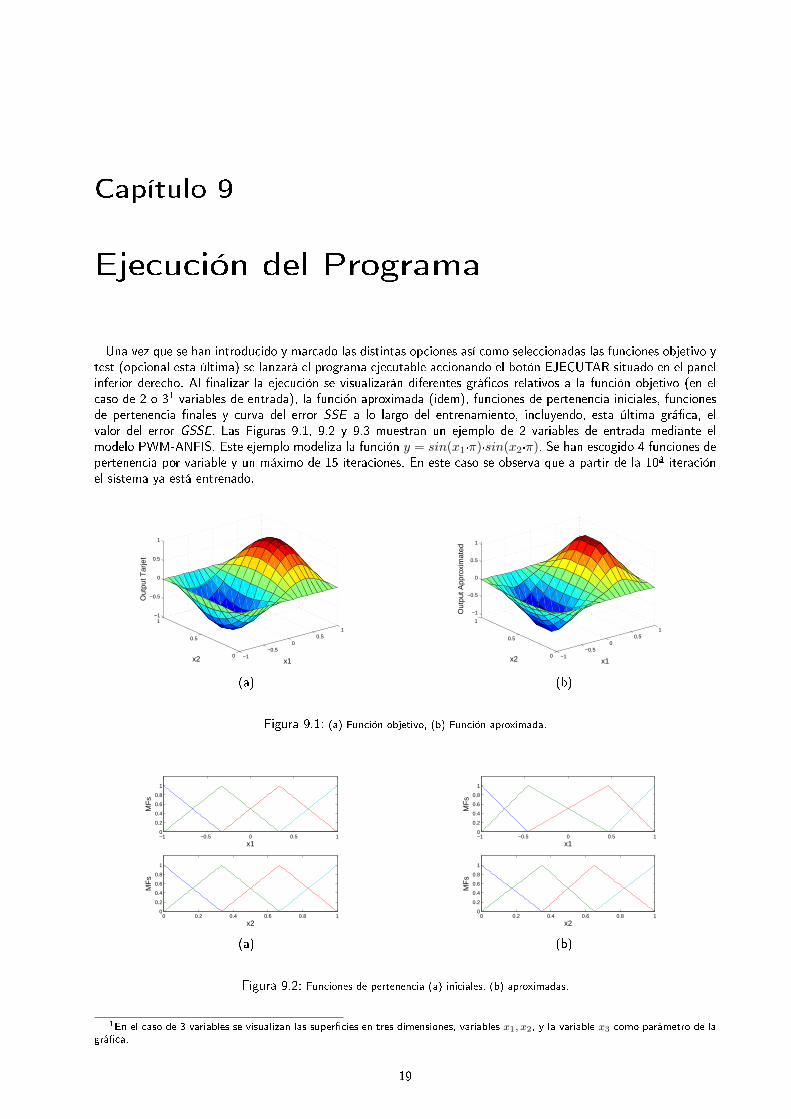
Una vez que se han introducido y marcado las distintas opciones así como seleccionadas las funciones objetivo ytest (opcional esta última) se lanzará el programa ejecutable accionando el botón EJECUTAR situado en el panelinferior derecho. Al �nalizar la ejecución se visualizarán diferentes grá�cos relativos a la función objetivo (en elcaso de 2 o 31 variables de entrada), la función aproximada (idem), funciones de pertenencia iniciales, funcionesde pertenencia �nales y curva del error SSE a lo largo del entrenamiento, incluyendo, esta última grá�ca, elvalor del error GSSE. Las Figuras 9.1, 9.2 y 9.3 muestran un ejemplo de 2 variables de entrada mediante elmodelo PWM-ANFIS. Este ejemplo modeliza la función y = sin(x1·π)·sin(x2·π). Se han escogido 4 funciones depertenencia por variable y un máximo de 15 iteraciones. En este caso se observa que a partir de la 10ª iteraciónel sistema ya está entrenado.
−1−0.5
00.5
1
0
0.5
1−1
−0.5
0
0.5
1
x1x2
Out
put T
arje
t
(a)
−1−0.5
00.5
1
0
0.5
1
−1
−0.5
0
0.5
1
x1x2
Out
put A
ppro
xim
ated
(b)
Figura 9.1: (a) Función objetivo, (b) Función aproximada.
−1 −0.5 0 0.5 10
0.2
0.4
0.6
0.8
1
x1
MF
s
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
x2
MF
s
(a)
−1 −0.5 0 0.5 10
0.2
0.4
0.6
0.8
1
x1
MF
s
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
x2
MF
s
(b)
Figura 9.2: Funciones de pertenencia (a) iniciales, (b) aproximadas.
1En el caso de 3 variables se visualizan las super�cies en tres dimensiones, variables x1, x2, y la variable x3 como parámetro de lagrá�ca.
19
0 5 10 151
1.5
2
2.5
3
3.5
4
4.5
5x 10
−3
SSE(1) : 0.0043894
SSE(15) : 0.0013508
GSSE : 0.0018523
LEARNING REGISTER : SSE
IterationS
SE
Figura 9.3: Evolución del error SSE y valor del error GSSE.
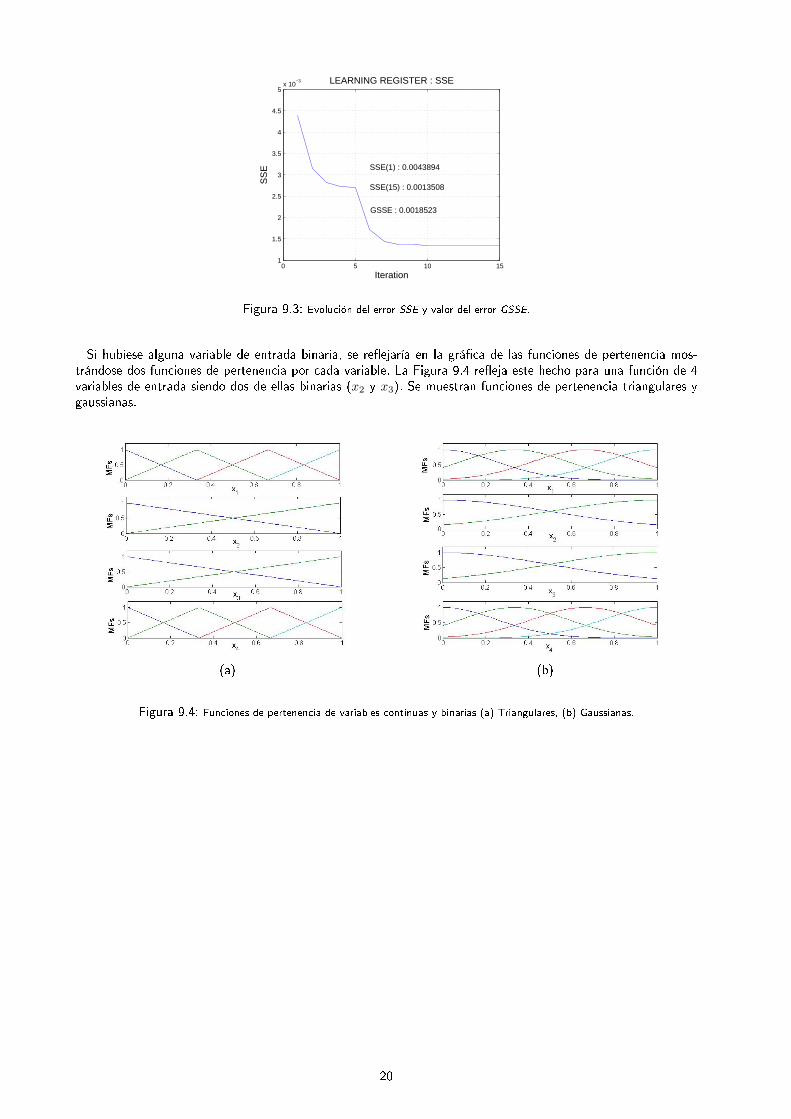
Si hubiese alguna variable de entrada binaria, se re�ejaría en la grá�ca de las funciones de pertenencia mos-trándose dos funciones de pertenencia por cada variable. La Figura 9.4 re�eja este hecho para una función de 4variables de entrada siendo dos de ellas binarias (x2 y x3). Se muestran funciones de pertenencia triangulares ygaussianas.
(a) (b)
Figura 9.4: Funciones de pertenencia de variables continuas y binarias (a) Triangulares, (b) Gaussianas.
20
Capítulo 10
Ficheros Generados por laHerramienta una vez Finalizada laEjecución
Al �nalizar la ejecución se generan los �cheros correspondientes al modelo escogido. La herramienta normaliza elespacio de variables de entrada y, por consiguiente, el de los parámetros antecedentes. Como también se normalizala función objetivo y la función de test, la función entrenada resultará normalizada.
1. Modelo PWM-ANFIS: Los �cheros son los relativos a los parámetros antecedentes, coordenadas a, b, c,(ver Figura 3.2) de las funciones de pertenencia (triángulos), parámetros consecuentes, error SSE y losvalores de la función entrenada.
a) Parámetros antecedentes: Los �cheros generados son parameters_a, parameters_b y parameters_c.El primer �chero contiene las coordenadas aij (variable de entrada i - antecedente j) de las funcionesde pertenencia que han intervenido en la modelización. Esta coordenada (parámetro) es el que ha sidoentrenado durante el proceso de modelización. El segundo �chero contiene las coordenadas bij y eltercer �chero contiene las coordenadas cij de las funciones de pertenencia que han intervenido en lamodelización. La Tabla 10.1 muestra un ejemplo de 2 variables de entrada con 4 y 5 antecedentesrespectivamente.
Tabla 10.1: Ficheros de parámetros antecedentes para 2 variables de entrada con 4 y 5 antecedentes (a) aij , (b) bij , (c) cij .
a11 a12 a13 a14 0a21 a22 a23 a24 a25
(a)
b11 b12 b13 b14 0b21 b22 b23 b24 b25
(b)
c11 c12 c13 c14 0c21 c22 c23 c24 c25
(c)
b) Parámetros consecuentes: El �chero generado se denomina parameters_consequents_tri. La dimensiónp de este �chero se corresponde con el número de parámetros consecuentes. En un modelo PWM-ANFIS se corresponde con el producto del número de antecedentes de las n variables de entrada, es
decir p =n∏i=1
mi.
c) Error SSE : El �chero generado se denomina SSE_tri. Contiene los valores del error en cada iteración.
d) Función entrenada: El �chero generado se denomina Function_Learned_tri. Presenta la misma es-tructura que la función objetivo vista en el Capítulo 8 en la Tabla 8.1.
e) En el caso de haber encontrado coordenadas repetidas en la Función Objetivo, se genera una nuevafunción denominada FunctionTarjet_norep.
21

1. Modelo ANFIS Genérico: Los �cheros son los relativos a los parámetros (ancho σij y coordenada mij) delas funciones de pertenencia (gaussianas), parámetros consecuentes, error SSE y los valores de la funciónentrenada. Los �cheros presentan las mismas consideraciones que en el modelo anterior.
a) Parámetros antecedentes: Los �cheros generados son parameters_m y parameters_s.
b) Parámetros consecuentes: El �chero generado se denomina parameters_consequents_gauss.
c) Error SSE : El �chero generado se denomina SSE_gauss.
d) Función entrenada: El �chero generado se denomina Function_Learned_gauss.
e) En el caso de haber encontrado coordenadas repetidas en la Función Objetivo, se genera una nuevafunción denominada FunctionTarjet_norep.
22

Capítulo 11
Observaciones Finales
La modelización se puede realizar de manera alternativa, sin hacer uso de la herramienta PWM-ANFIS Tool,de la siguiente forma:
1. Modelización PWM-ANFIS: En la carpeta donde se encuentra la aplicación hay un archivo ejecutable de-nominado �pwm_an�s.exe� que puede ser lanzado individualmente, para ello es necesario haber creado los�cheros parameters_tri.txt y functionTarjet.txt, opcionalmente functionOfTest.txt, en el mismo subdirec-torio. El programa ejecutable de Matlab requiere que la función objetivo y la función de test, se denominende esta forma.
2. Modelización ANFIS Genérico: En la carpeta donde se encuentra la aplicación hay un archivo ejecutabledenominado �an�s_generico.exe� que puede ser lanzado individualmente, para ello es necesario haber crea-do los �cheros parameters_gauss.txt y functionTarjet.txt, opcionalmente functionOfTest.txt, en el mismosubdirectorio. El programa ejecutable de Matlab requiere que la función objetivo y la función de test, sedenominen de esta forma.
La estructura de estos �cheros se puede consultar en los Capítulos 7 y 8.
Los archivos �pwm_an�s.exe� y �an�s_generico.exe� se ejecutan sobre una ventana de sistema.
23

24
Bibliografía
[1] I. Baturone, S. Sanchez-Solano, A. Barriga, and J.L. Huertas. Implementation of cmos fuzzy controllers asmixed-signal integrated circuits. IEEE Transactions on Fuzzy Systems, 5(1):1�19, 1997.
[2] G. Bosque, I. del Campo, and J. Echanobe. E�cient hardware/software implementation of a neuro-fuzzysystem on a sopc. In Recent Advanced in Soft Computing (RASC), 2006.
[3] G. Bosque, I. del Campo, J. Echanobe, and J.M. Tarela. Implementación de un sistema neuro-fuzzy sobre unsopc. In Estylf 2004, Sept. 2004.
[4] I. del Campo, J. Echanobe, G. Bosque, and J.M. Tarela. E�cient hardware/software implementation of anadaptive neuro-fuzzy system. IEEE Transactions on Fuzzy Systems, 16(3):761�778, Junne 2008.
[5] J. Echanobe, I. del Campo, and J.M. Tarela. Issues concerningthe analysis and implementation of a class offuzzy controllers. Fuzzy Sets and Systems, 155:252�271, 2005.
[6] J.-S. R. Jang. An�s: Adaptive-network-based fuzzy inference system. IEEE Transactions on Systems, Man,and Cybernetics, 23:665�685, 1993.
[7] R. Rovatti, C. Fantuzzi, and S. Simani. High-speed dsp-based implementation of piecewise-a�ne andpiecewise-quadratic fuzzy systems. Signal Processing, 80:951�963, 2000.
[8] M. Sugeno and G. T. Kang. Structure identi�cation of fuzzy model. Fuzzy Sets Systems, 28(1):15�33, 1988.
[9] T. Takagi and M. Sugeno. Fuzzy identi�cation of systems and its applications to modelling and control. IEEETransactions on Systems, Man and Cybernetics, 15:116�132, 1985.
25