Processos ARMA Exemplos - Departamento de Economia
39
Processos ARMA Exemplos S´ eries Temporais e Modelos Dinˆ amicos em Econometria Marcelo C. Medeiros Departamento de Economia Pontif´ ıcia Universidade Cat´olica do Rio de Janeiro Aula 4 Marcelo C. Medeiros S´ eries Temporais e Modelos Dinˆ amicos
Transcript of Processos ARMA Exemplos - Departamento de Economia

Processos ARMAExemplos
Series Temporais e Modelos Dinamicos em
Econometria
Marcelo C. Medeiros
Departamento de EconomiaPontifıcia Universidade Catolica do Rio de Janeiro
Aula 4
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
O Processo Media-Movel
Muitas vezes, a estrutura auto-regressiva nao e suficiente paradescrever totalmente a dinamica induzida por modeloseconomicos.
Por exemplo, vamos considerar o seguinte modelo:
yt = β0 + β1xet+1 + ut ,
onde xet+1 e a previsao (subjetiva) para xt+1 feita pelosagentes no instante t e ut e o erro do modelo eut ∼ IID(0, σ2).
Vamos supor que as expectativas sejam definidas por meio daseguinte regra (expectativas adaptativas):
xet+1 = λxet + (1− λ)xt , 0 ≤ λ ≤ 1.
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
O Processo Media-Movel
Portanto,
(1− λL)xet+1 = (1− λ)xt
xet+1 =(1− λ)
(1− λL)xt .
e
yt = β0 + β1(1− λ)
(1− λL)xt + ut
(1− λL)yt︸ ︷︷ ︸
Componente Auto-regressivo
= β0(1−λ)+β1(1−λ)xt+ ut − λut−1︸ ︷︷ ︸
Processo Media Movel
.
O modelo acima e uma caso particular de um modelo ARMAcom defasagens distribuıdas.
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Processos ARMA com Defasagens Distribuıdas
O Processo ARMA(p,q)
Um processo yt e chamado de processo auto-regressivo mediamovel de ordem (p, q), ARMA(p,q), se:
yt = α0 + α1yt−1 + · · ·+ αpyt−p + θ1ut−1 + · · · + θqut−q
+ ut ,
αp(L)yt = α0 + θq(L)ut ,
onde α0, α1, . . . , αp, θ1, . . . , θq sao parametros e ut e tal que
E(ut |Ft−1) = 0
E(u2t |Ft−1) = σ2
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Processos ARMA com Defasagens Distribuıdas
O Processo MA(q)
Um processo yt e chamado de processo media movel de ordemq, MA(q), se:
yt = µ+ θ1ut−1 + · · ·+ θqut−q + ut ,
yt = µ+ θq(L)ut ,
onde θ1, . . . , θq sao parametros e ut e tal que
E(ut |Ft−1) = 0
E(u2t |Ft−1) = σ2
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Processos ARMA com Defasagens Distribuıdas
O Processo MA(∞)
Um processo yt e chamado de processo MA(∞), se:
yt = µ+
∞∑
j=0
ψjut−j
yt = µ+ ψ∞(L)ut ,
onde ψ0 = 1, ψ1, . . . sao parametros e ut e tal que
E(ut |Ft−1) = 0
E(u2t |Ft−1) = σ2
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Processos ARMA com Defasagens Distribuıdas
Sera utilizada a letra grega ψ ao inves de θ para representaros parametros do processo MA(∞).
Teorema: Se∑
∞
j=0 ψ2j <∞, entao o processo MA(∞) e
estacionario de segunda ordem.
Teorema: Se∑
∞
j=0 |ψj | <∞, entao o processo MA(∞) eergodico para media.
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Processos ARMA com Defasagens Distribuıdas
O Processo AR(p)
Um processo yt e chamado de processo auto-regressivo deordem p, AR(p), se:
yt = α0 + α1yt−1 + · · ·+ αpyt−p + ut ,
αp(L)yt = α0 + ut ,
onde α0, α1, . . . , αp sao parametros e
E(ut |Ft−1) = 0
E(u2t |Ft−1) = σ2
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Processos ARMA com Defasagens Distribuıdas
O Processo ARMA com Defasagens Distribuıdas
Um processo yt e chamado de processo ARMA com defasagensdistribuıdas, ARMADL, se:
yt = α0 + α1yt−1 + · · ·+ αpyt−p + β′
0xt + · · ·+ β′
pxt−p
+ θ1ut−1 + · · ·+ θqut−q + ut ,
αp(L)yt = α0 + βp(L)′xt + θq(L)ut ,
onde α0, α1, . . . , αp, θ1, . . . , θq, β0, . . . ,βp, sao parametros e
E(ut |Ft−1) = 0
E(u2t |Ft−1) = σ2
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Processos MA – Momentos
Media
E[yt ] = E[µ] +
q∑
j=1
θjE[ut−j ] + E[ut ] = µ
Variancia
V[yt ] = E[(yt − µ)2
]
= E[(θ1ut−1 + · · ·+ θqut−q + ut)
2]
= E[u2t]+
q∑
j=1
θ2j E[u2t−j
]
= σ2
1 +
q∑
j=1
θ2j
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Processos MA – Momentos
Autocovariancia – COV(yt , yt−k)
γk = E[(yt − µ)(yt−k − µ)]
= E
ut +
q∑
j=1
θjut−j
×
ut−k +
q∑
j=1
θjut−k−j
=
σ2(θk + θk+1θ1 + · · ·+ θqθq−k) se 0 < k ≤ q
0 k > q.
Autocorrelacao
ρk =
(θk+θk+1θ1+···+θqθq−k )
1+θ21+θ22+···+θ2qse 0 < k ≤ q
0 k > q.
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Processos MA(∞) – Momentos
Media:E[yt ] = µ.
Variancia:
V(yt) = σ2 limT→∞
T∑
j=0
ψ2j
.
Autocovariancia:
γk = σ2
∞∑
j=0
ψk+jψj
.
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Processos AR(p) – Momentos
Processo AR(1):
yt = φ0 + φ1yt−1 + ut
Por substituicao recursiva
y1 = φ0 + φ1y0 + u1
y2 = φ0 + φ1y1 + u2 = φ0(1 + φ1) + φ21y0 + φ1u1 + u2
y3 = φ0(1 + φ1 + φ21) + φ31y0 + φ21u1 + φ1u2 + u3
...
yt = φ0
t−1∑
i=0
φi1 + φt1y0 +
t−1∑
i=0
φi1ut−i
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Processos AR(1) – Momentos
Media
E[yt ] = φ0
t−1∑
i=0
φi1 + φt1E[y0]
Variancia
V[yt ] = φ2t1 V[y0] + σ2t−1∑
i=0
φ2i1
=
φ2t1 V[y0] + σ21−φ2t
1
1−φ21
se |φ1| 6= 1
V[y0] + σ2t se |φ1| = 1.
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Processos AR(1) – Momentos
Autocovariancia – COV(yt , yt−k)
γk =
φ2t−k1 V(y0) + σ2φk1
∑t−1−k
i=0 φ2i1 se k ≥ 0
φ2t−k1 V(y0) + σ2φ
|k|1
∑t−1i=0 φ
2i1 se k < 0
Se |φ1| 6= 1
γk =
φ2t−k1 V[y0] + σ2φk1
1−φ2(t−k)1
1−φ21
se k ≥ 0
φ2t−k1 V[y0] + σ2φ
|k|1
1−φ2t1
1−φ21
se k < 0
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Processos AR(1) – Momentos
Teorema
O processo yt sera estacionario de segunda ordem se, e somentese, |φ0| = 0, |φ1| < 1 e Y0 for uma variavel aleatoria com media 0
e variancia σ2
(1−φ21).
Prova:1 E[yt ] = 0 ⇒ Independente de t!2 V[yt ] =
σ2
1−φ21⇒ Independente de t!
3 γk = σ2 φ|k|1
1−φ21⇒ Independente de t!
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Processos AR(1) – Momentos
Caso |φ1| < 1 o processo sera assintoticamente estacionario sey0 tiver media e variancia finitas. Neste caso,
1 E[yt ] →φ0
1−φ1
2 V[yt ] →σ2
1−φ21
3 γk → σ2 φ|k|1
1−φ21
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Processos AR(p) – Momentos
Considere o processo AR(p)
yt = φ0 + φ1yt−1 + · · ·+ φpyt−p + ut
Quais sao as condicoes de estacionariedade (assintotica) parao processo AR(p)?
Considere φ0 = 0. Logo,
Yt = FtY0 +
t−1∑
i=0
Fiut−i ,
onde:
Yt =
ytyt−1
...yt−p+1
, F =
φ1 φ2 φ3 · · · φp
1 0 0 · · · 00 1 0 · · · 0...
.... . . · · ·
...0 0 · · · 1 0
, ut =
ut0...0
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Processos AR(p) – Momentos
Se os autovalores λ1, . . . , λp da matriz F forem menores que 1em modulo entao o processo AR(p) sera assintoticamenteestacionario de segunda ordem.
De forma equivalente se as raızes do polinomio
1− φ1z − φ2z2 − · · · − φpz
p = 0
forem maiores que 1 em modulo, entao o processo AR(p) seraassintoticamente estacionario de segunda ordem.
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Processos AR(p) – Momentos
Caso particular: AR(2)As condicoes de estacionariedade para o processo AR(2) sao:
1 φ1 + φ2 < 1
2 φ2 − φ1 < 1
3 |φ2| < 1
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Processos AR(p) – Momentos
Media
E[yt ] = φ0 +
p∑
i=1
φiE[yt−i ]
Se o processo for estacionario de segunda ordem
E[yt ] = E[yt−1] = E[yt−2] = · · · = E[yt−p] = µ
Logo,
µ = φ0 +
p∑
i=1
φiµ =φ0
1−∑p
i=1 φi
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Processos AR(p) – Momentos
Autocovariancias (k 6= 0)
γk =
p∑
i=1
φiγk−i
Variancia
γ0 =
p∑
i=1
φiγi + σ2
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Representacao MA(∞) de processos AR
Considere um processo AR(1)
yt = φ0 + φ1yt−1 + ut ,
onde |φ1| < 1.Considerando que o processo teve inıcio infinitamente nopassado, o processo AR(1) pode ser escrito como
yt =φ0
1− φ1+ ut + φ1ut−1 + φ21ut−3 + · · ·
=φ0
1− φ1+
∞∑
i=0
φi1ut−i
︸ ︷︷ ︸
Representacao MA(∞)⇓
ψi = φi1 ⇒∑∞
i=0 |ψi | <∞
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Representacao MA(∞) de processos AR
De forma equivalente o processo AR(1) pode ser escrito como
(1− φ1L)yt = φ0 + ut ,
onde |φ1| < 1.
O operador defasagem L possui uma propriedade muitoimportante:
Se |φ1| < 1 entao
(1− φ1L)−1 = (1 + φ1L+ φ21L
2 + φ31L3 + · · · )
Se |φ1| > 1 entao
(1− φ1L)−1 =− φ−1
1 L−1
× (1 + φ−11 L−1 + φ−2
1 L−2 + · · · )
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Representacao MA(∞) de processos AR
Resultado Importante
Um processo AR(p) estacionario de segunda ordem pode serrepresentado por um processo MA de ordem infinita.
Importante para estimacao.
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Representacao AR(∞) de processos MA
Considere o processo MA(1): yt = µ+ θ1ut−1 + ut .
Por substituicao recursiva
(yt − µ) =ut + θ1(yt−1 − µ)− θ21(yt−2 − µ)− · · ·
− (−1)t−1θt−11 (y1 − µ) + (−1)tθt1u0.
Se |θ1| < 1 e se o processo teve inıcio infinitamente nopassado, entao
yt = µ
[
1−
∞∑
i=1
(−1)iθi1
]
︸ ︷︷ ︸
φ0
−
∞∑
i=1
(−1)iθi1yt−i + ut
O que acontece quando |θ1| > 1? E quando |θ1| = 1?
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
MotivacaoDefinicaoPropriedadesInvertibilidade
Representacao AR(∞) de processos MA
Considere o processo MA(q)
yt = µ+ θ1ut−1 + · · ·+ θqut−q + ut .
Se as raızes do polinomio
1 + θ1z + θ2z2 + · · ·+ θqz
q = 0
estiverem todas fora do cırculo unitario, o processo MA(q)possui uma representacao AR(∞).
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
Modelo de Transmissao MonetariaIPCA - janeiro de 1999 ate abril de 2011
Um Modelo Simples de Transmissao Monetaria
Considere o modelo de transmissao monetaria visto na Aula 1:
πt = λyt + πet + u1t , 0 < λ < 1
yt = γ (it−1 − πet ) + u2t , −1 < γ < 0
πet = πt−1
it = i∗ + ρ (πt − π∗) , ρ ≥ 0,
onde ut = (u1t , u2t)′ ∼ NID(0,Ω), πt e a inflacao, yt e o
hiato do produto, πet e a expectativa de inflacao para oinstante t feita em t − 1, it e a taxa de juros nominal, i∗ e ataxa de juros de equilıbrio e π∗ e a meta de inflacao.
As equacoes acima definem um modelo estrutural parazt = (πt , yt , it , π
et )
′.
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
Modelo de Transmissao MonetariaIPCA - janeiro de 1999 ate abril de 2011
Um Modelo Simples de Transmissao Monetaria
Pelo modelo anterior a inflacao e “gerada” a partir doseguinte processo AR(1):
πt = λγ (i∗ − ρπ∗) + [γλ(ρ− 1) + 1]πt−1 + λu2,t + u1t
πt = φ0 + φ1πt−1 + v1t ,
onde v1t ∼ NID(0, λ2ω22 + ω11) (supondo que ω12 = 0!).
Ja vimos que para a inflacao ser estacionaria precisamos que|φ1| = |γλ(ρ− 1) + 1| < 1.
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
Modelo de Transmissao MonetariaIPCA - janeiro de 1999 ate abril de 2011
Um Modelo Simples de Transmissao Monetaria
Alguns casos importantes (lembre-se que −1 < γλ < 0 peladefinicao do modelo):
1 ρ = 0 ⇒ φ1 = −γλ+ 1 > 1 ⇒ Inflacao explosiva!2 0 ≤ ρ < 1 ⇒ φ1 > 1 ⇒ Inflacao explosiva!3 ρ = 1 ⇒ πt = φ0 + πt−1 + v1t ⇒ Inflacao segue um passeio
aleatorio!4 1 < ρ ≤ γλ−1
γλ> 0 ⇒ 0 ≤ φ1 < 1 ⇒ Inflacao e estacionaria e
persistente.5
γλ−1γλ
< ρ < γλ−2γλ
⇒ −1 < φ1 < 0 ⇒ Inflacao estacionaria eanti-persistente.
6 ρ ≥ γλ−2γλ
⇒ φ1 ≤ −1 ⇒ Inflacao nao e estacionaria.
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
Modelo de Transmissao MonetariaIPCA - janeiro de 1999 ate abril de 2011
Um Modelo Simples de Transmissao Monetaria
0 1 2 3 4 5 6 7 8 9 10−1.5
−1
−0.5
0
0.5
1
1.5γ=−0.5 e λ=0.5
ρ
φ 1
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
Modelo de Transmissao MonetariaIPCA - janeiro de 1999 ate abril de 2011
Um Modelo Simples de Transmissao Monetaria
0 5 10 15 20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Defasagem
FAC
FAC
ρ=2ρ=3ρ=4
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
Modelo de Transmissao MonetariaIPCA - janeiro de 1999 ate abril de 2011
Um Modelo Simples de Transmissao Monetaria
0 5 10 15 20
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Defasagem
FAC
FAC
ρ=8ρ=7ρ=6
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
Modelo de Transmissao MonetariaIPCA - janeiro de 1999 ate abril de 2011
Um Modelo Simples de Transmissao Monetaria
Considere o modelo estrutural[1 −λ0 1
] [πtyt
]
=
[0
γ (i∗ − ρπ∗)
]
+
[1 0
γ(ρ− 1) 0
] [πt−1
yt−1
]
+
[u1tu2t
]
.
O modelo sera estacionario se os autovalores da matriz
C1 =
[1 −λ0 1
]−1 [1 0
γ(ρ− 1) 0
]
=
[1 + λγ(ρ− 1) 0γ(ρ− 1) 0
]
forem menores do que 1 em modulo.
A condicao acima sera atendida se |1 + λγ(ρ− 1)| < 1.
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
Modelo de Transmissao MonetariaIPCA - janeiro de 1999 ate abril de 2011
Um Modelo Simples de Transmissao Monetaria
Vamos calcular a resposta da inflacao em t + h (e do hiato)ao choque estrutural no hiato (na inflacao).
Para tal precisamos encontrar os elementos (1, 2) e (2, 1) damatriz
[1 −λ0 1
]−1 [1 + λγ(ρ− 1) 0γ(ρ− 1) 0
]h
.
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
Modelo de Transmissao MonetariaIPCA - janeiro de 1999 ate abril de 2011
Um Modelo Simples de Transmissao Monetaria
0 5 10 15 20−1.5
−1
−0.5
0
0.5
h
FRI
FRI − ρ=2, γ=−0.5 e λ=0.5
Choque em u
2t, reposta em π
t+h
Choque em u1t
, reposta em yt+h
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
Modelo de Transmissao MonetariaIPCA - janeiro de 1999 ate abril de 2011
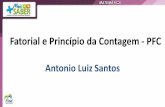
IPCA - janeiro de 1999 ate abril de 2011
-0.4
0.0
0.4
0.8
1.2
1.6
2.0
2.4
2.8
3.2
99 00 01 02 03 04 05 06 07 08 09 10 11
IPCA - janeiro de 1999 até abril de 2011
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
Modelo de Transmissao MonetariaIPCA - janeiro de 1999 ate abril de 2011
IPCA - janeiro de 1999 ate abril de 2011
0 5 10 15 20
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
defasagem
fac
FAC − IPCA
Autocorrelações estimadas fora do intervalo determinado pelas linhasazuis são estatísticamente significantes ao nível de 95%
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos

Processos ARMAExemplos
Modelo de Transmissao MonetariaIPCA - janeiro de 1999 ate abril de 2011
IPCA e Hiato - janeiro de 1999 ate abril de 2011
-0.5
0.0
0.5
1.0
1.5
2.0
2 4 6 8 10 12 14 16 18 20 22 24
HIATO -> HIATO
-0.5
0.0
0.5
1.0
1.5
2.0
2 4 6 8 10 12 14 16 18 20 22 24
IPCA -> HIATO
-.1
.0
.1
.2
.3
.4
2 4 6 8 10 12 14 16 18 20 22 24
HIATO -> IPCA
-.1
.0
.1
.2
.3
.4
2 4 6 8 10 12 14 16 18 20 22 24
IPCA -> IPCA
Função de Resposta ao Impulso
Marcelo C. Medeiros Series Temporais e Modelos Dinamicos