Presentation Chapter 1: Deconvolution
14
Deconvolution (Ta3520) Deconvolution – p. 1/1
-
Upload
tu-delft-opencourseware -
Category
Technology
-
view
1.937 -
download
3
Transcript of Presentation Chapter 1: Deconvolution

Deconvolution(Ta3520)
Deconvolution – p. 1/14

Convolutional model of seismic dataSeismogram :
x(t) = s(t) ∗ g(t)
x(t) = seismogram
s(t) = seismic wavelet
g(t) = earth response (Green’s function)
Deconvolution – p. 2/14

Inverse filter: deconvolutionDesired: undo effect of source s(t):
f(t) ∗ s(t) = δ(t)
Apply f(t) to seismogram x(t):
f(t) ∗ x(t) = f(t) ∗ s(t) ∗ g(t)
= δ(t) ∗ g(t)
= g(t)
Neutralizing effect of s(t) is called Deconvolution
Deconvolution – p. 3/14

Inverse filter in frequency domainIn frequency domain:
X(f) = S(f)G(f)
Inverse of S(f):
F (f) =1
S(f)
Apply to spectrum of seismogram X(f):
X(f)
S(f)= G(f)
Deconvolution – p. 4/14

Deconvolution in presence of noiseSignal model in presence of noise:
x(t) = s(t) ∗ g(t) + n(t)
In frequency domain:
X(f) = S(f)G(f) + N(f)
Deconvolution (dividing by S(f)):
X(f)
S(f)= G(f) +
N(f)
S(f)
If S(f) is small for certain frequencies, this blows up thenoise.
Deconvolution – p. 5/14

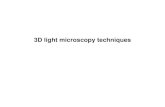
Deconvolution in presence of noise
frequency
signal spectrum
noise spectrum
frequency
signal spectrum
noise spectrum
a) Before deconvolution
1.0
b) After deconvolution
Deconvolution – p. 6/14

Deconvolution in presence of noiseTherefore, stabilize division:
Apply filter:
F (f) =S∗(f)
S(f)S∗(f) + ε2
If |S(f)| >> ε : F (f) = 1S(f)
If |S(f)| << ε : F (f) = S∗(f)ε2
≈ 0
Choose ε as, e.g., : ε = α × max(|S(f)|) withα ≈ 0.01 − 0.1
Deconvolution – p. 7/14

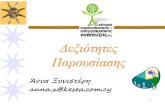
Deconvolution without noise
0 20 40 60 80 100 1200
2
0 20 40 60 80 100 1200
2
4
0 20 40 60 80 100 1200
1
Deconvolution – p. 8/14

Deconvolution in presence of noise
0 20 40 60 80 100 1200
2
0 20 40 60 80 100 1200
2
4
0 20 40 60 80 100 1200
1
Deconvolution – p. 9/14

Deconvolution to desired outputDeconvolution problem:
f(t) ∗ s(t) = d(t)
where d(t) is desired output (previously δ(t))
Deconvolution – p. 10/14

Deconvolution to desired output
frequency
signal spectrum S(ω)
smoothed spectrum D(ω)
smoothed signal d(t)original signal s(t)
time
Deconvolution – p. 11/14

Deconvolution to desired outputThen, output after deconvolution:
F (f)X(f) = D(f)G(f)
So filter:F (f) =
D(f)
S(f)
Or, stabilized,:
F (f) =D(f)S∗(f)
S(f)S∗(f) + ε2
Deconvolution – p. 12/14

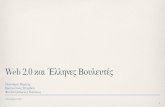
Deconvolution: field data
0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
time
(s)
500 1000 1500 2000 2500offset (m)
Deconvolution – p. 13/14

Deconvolution field data
0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
time
(s)
500 1000 1500 2000 2500offset (m)
Deconvolution – p. 14/14