Pr-Calcul Dinamic Autovehicul
24
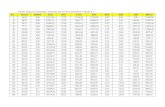
Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 2 Prof.dr.ing. Ion Preda Calculul dinamic al autovehiculului Dimensiuni predefinite kg 1kg = s 1s = m 1m = min 60 s = hr 3600 s = km 1000 m = rpm 0.105 s 1 − = kph 1 km hr ⋅ = N 1N = W 1W = J 1J = Dimensiuni definite rot 2 π ⋅ rad ⋅ := rot 6.28 = rpm 1 rot min ⋅ = Organizarea generala a autovehiculului Date impuse prin tema Viteza maxima v max 190 km hr := Numarul de locuri N loc 5 := Adoptarea maselor Pe baza marimilor statistice obtinute de la modelele asemanatoare, prezentate in tab.1 s-au adoptat urmatoarele dimensiuni: Numarul de locuri in fata N locf 2 := Masa unei persoane m 1p 75kg := Masa bagajelor unei persoane m b1 20kg := Masa proprie a autovehiculului m 0 1310kg :=
-
Upload
puncte-colorate -
Category
Documents
-
view
80 -
download
5
description
ds
Transcript of Pr-Calcul Dinamic Autovehicul

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 2 Prof.dr.ing. Ion Preda
Calculul dinamic al autovehicululuiDimensiuni predefinitekg 1kg= s 1 s= m 1 m=
min 60 s= hr 3600 s= km 1000 m= rpm 0.105 s 1−= kph 1
kmhr
⋅=N 1 N= W 1W= J 1 J=
Dimensiuni definite
rot 2 π⋅ rad⋅:= rot 6.28=
rpm 1rotmin
⋅=
Organizarea generala a autovehiculului
Date impuse prin tema
Viteza maxima vmax 190kmhr
:=
Numarul de locuri Nloc 5:=
Adoptarea maselor Pe baza marimilor statistice obtinute de la modelele asemanatoare, prezentate in tab.1s-au adoptat urmatoarele dimensiuni:
Numarul de locuri in fata Nlocf 2:=
Masa unei persoane m1p 75kg:=
Masa bagajelor unei persoane mb1 20kg:=
Masa proprie a autovehiculului m0 1310kg:=

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 3 Prof.dr.ing. Ion Preda
Masa pasagerilor din fata (fara sofer) mpf Nlocf 1−( )m1p:= mpf 75 kg=
Masa pasagerilor din spate mps Nloc Nlocf−( )m1p:= mps 225 kg=
Masa tuturor pasagerilor mp Nloc m1p:= mp 375 kg=
Masa bagajelor mb Nloc mb1⋅:= mb 100 kg=
Masa utila mu mp mb+:= mu 475 kg=
Masa totala a vehiculului incarcat mi m0 mu+:= mi 1785 kg=
Greutatea totala a autovehiculului incarcat Gi mi g⋅:= Gi 17505 N=
ηGmu
m0:= ηG 0.36=Coeficientul de utilizare a greutătii
Adoptarea dimensiunilor de gabarit ale automobilului
ampatamentul Lam 2642 mm⋅:=
ecartamentul Bec 1525mm:=
înăltimea totală Hin 1430mm:=
Repartitia maselor - Autovehicul incarcat
Se adopta raportul dintre greutatea statica repartizata pe puntea din fatasi greutatea totala (autovehicul incarcat)
wi 0.48:=
Greutatea ce revine puntii din fată
G1i wi Gi⋅:= G1i 8402 N=
Greutatea ce revine puntii din spate
G2i Gi G1i−:= G2i 9103 N=
Greutatea repartizată pe o roată a puntii din fată are valoarea
Gr1iG1i
2:= Gr1i 4201 N=
Greutatea repartizată pe o roată a puntii din spate are valoarea
Gr2iG2i
2:= Gr2i 4551 N=
Distanta pe orizontala de la centrul de greutate la puntea din spatebi Lam wi⋅:= bi 1.27m=
Distanta pe orizontala de la centrul de greutate la puntea din fataai Lam bi−:= ai 1.37m=
Inaltimea centrului de greutate hi 0.8 m⋅:=

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 4 Prof.dr.ing. Ion Preda
Repartitia maselor - Autovehicul descarcat
Determinarea pozitiei centrului de greutate pentru autovehiculul descarcat:mi ai⋅ md ad⋅
x
mx ax⋅( )∑+=x este o masa oarecare ce poate fi descarcata
mi hi⋅ md hd⋅
x
mx hx⋅( )∑+=
Masa vehicului descarcat
md mi mpf mps+ mb+( )−:= md 1385 kg=
Greutatea vehiculului descarcat Gd md g⋅:= Gd 13582 N=
Pe baza schitei la scara a vehiculului se citesc coordonatele maselor ce se descarca
Pozitiile pe orizontala ale maselor fata de puntea din fataapf 1.45m:=pasagerul din fataaps 2.5m:=pasagerul din spateab 3.2m:=bagaje
Pozitiile pe verticala ale maselorhpf 0.85m:=pasagerul din fatahps 0.9m:=pasagerul din spatehb 1.05m:=bagaje

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 5 Prof.dr.ing. Ion Preda
Pozitia centrului de greutate pe orizontala cand autovehiculul este descarcat:
admi ai⋅ mpf apf⋅ mps aps⋅+ mb ab⋅+( )−
md:= ad 1.05m=
Pozitia centrului de greutate pe verticala cand autovehiculul este descarcat:
hdmi hi⋅ mpf hpf⋅− mps hps⋅+ mb hb⋅+
md:= hd 1.21m=
Raportul dintre greutatea statica repartizata pe puntea din fatasi greutatea totala (autovehicul descarcat)
wdLam ad−
Lam:= wd 0.6=
Greutatea ce revine puntii din fataG1d wd Gd⋅:= G1d 8159.03 N=
Greutatea ce revine puntii din spate
G2d Gd G1d−:= G2d 5423.18 N=
Greutatea repartizată pe o roată a puntii din fată are valoarea
Gr1dG1d
2:= Gr1d 4080 N=
Greutatea repartizată pe o roată a puntii din spate are valoarea
Gr2dG2d
2:= Gr2d 2712 N=
Adoptarea rotilor Cea mai mare greutate statica pe o roata
Grmax max Gr1i Gr2i, ( ):= Grmax 4551 N=
Pe baza greutatii statice maxime se adopta din catalog tipul de pneuri
Se aleg anvelope 205/55 R16 , cu următoarele caracteristici:
Balonajul pneului Bpneu 205 mm⋅:=
Raportul inaltimea carcasei pe balonaj Asppneu 55 %⋅:= Asppneu 0.55=
Diametrul jantei Djanta 16 in⋅:= Djanta 406 mm⋅=
Inaltimea carcasei pe balonajul pneului Hpneu Bpneu Asppneu⋅:= Hpneu 113 mm⋅=
Raza liberă r0Djanta
2Hpneu+:= r0 315.95 mm⋅=
coeficientul de deformare a rotii λ 0.96:= De dezvoltat calculul razei dinamice a rotii
Raza dinamica a rotilor rd λ r0⋅:= rd 303 mm⋅=
Momentul de inertie al tuturor rotilor (4 roti) Jr 5 kg⋅ m2⋅:=

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 6 Prof.dr.ing. Ion Preda
Caracteristicile transmisiei autovehiculului
randamentul estimat ηest 0.92:=
Caracteristicile aerodinamice ale autovehiculului
coeficientul de rezistentă aerodinamicacx 0.5:=
Aria suprafetei frontale a autovehiculului
Saer Bec Hin⋅:= Saer 2.18m2=
De dezvoltat calculul ariei frontale pentru diferite forme
Conditiile de deplasareCoeficientul rezistentei totale a drumului
ψ f α, ( ) f cos α( )⋅ sin α( )+:=
Conditiile normale de deplasare (pe drum)Conditiile aerodinamice pentru obtinerea vitezei maxime
densitatea aerului (la 1 atmosfera si 15 gr Celsius)
ρaer 1.225kg
m3:=
Coeficientul aerodinamic al autovehiculului va avea valoarea
kaerρaer cx⋅
2:= kaer 0.306
kg
m3⋅=
Conditiile de drum pentru obtinerea vitezei maxime drum orizontal asfaltat de buna calitate
αv 0:= unghiul panteifV 0.014:= coeficientul de rezistentă la rulareψv ψ fV αv, ( ):= ψv 0.014= coeficientul rezistentei totale a drumuluiμV 0.9:= coeficientul de aderentă a solului - asfalt uscat
Cele mai grele conditii normale de deplasare (pe drum)
αmaxN 27deg:= 100 tan αmaxN( )⋅ 50.95= % unghiul maxim al pantei pe drumfN 0.02:= coeficientul de rezistentă la rulare pe drum de pamantψmaxN ψ fN αmaxN, ( ):= ψmaxN 0.472= coeficientul rezistentei totale a drumuluiμN 0.85:= coeficientul de aderentă al drumului de pamant
Cele mai grele conditii dificile de deplasare (in teren)αmaxR 42deg:= 100 tan αmaxR( )⋅ 90.04= % unghiul maxim al pantei in terenfR 0.03:= coeficientul de rezistentă la rulare in terenψmaxR ψ fR αmaxR, ( ):= ψmaxR 0.691= coeficientul rezistentei totale a terenuluiμR 0.8:= coeficientul de aderentă in teren

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 7 Prof.dr.ing. Ion Preda
Coeficientul shimbarii dinamice a sarcinii la puntile motoare la limita de aderentaRelatii de calcul
mmn μ α, hg, ( )Lam
Lam μ hg⋅+cos α( )⋅= la puntea din fata - 2 punti, tractiune pe fata
mnm μ α, hg, ( )Lam
Lam μ hg⋅−cos α( )⋅= la puntea din spate - 2 punti, tractiune pe spate
mmn μ α, hg, ( ) cos α( )= insumat de la ambele punti - 2 punti, tractiune integrala
la puntea din fata - 2 punti, tractiune integralammm1 μ α, hg, a, ( )
Lam a− μ hg⋅−( )Lam a−
cos αmaxN( )⋅=
la puntea din spate - 2 punti, tractiune integralammm2 μ α, hg, a, ( )
a μ hg⋅−( )a
cos αmaxN( )⋅=
Conditii normale (pe drum)
mNmniLam
Lam μN hi⋅+cos αmaxN( )⋅:= mNmni 0.71= tractiune pe fata
mNnmiLam
Lam μN hi⋅−cos αmaxN( )⋅:= mNnmi 1.2= tractiune pe spate
mNmm cos αmaxN( ):= mNmm 0.89= tractiune integrala
Conditii dificile (in teren)
mRmniLam
Lam μN hi⋅+cos αmaxR( )⋅:= mRmni 0.59= tractiune pe fata
mRnmiLam
Lam μN hi⋅−cos αmaxR( )⋅:= mRnmi 1= tractiune pe spate
mRmm cos αmaxR( ):= mRmm 0.74= tractiune integrala
Pentru autovehiculul considerat (4x4):mNi mNmm:= mNi 0.89=
mRi mRmm:= mRi 0.74=
Rampele maxime ce ar putea fi urcate (conditii de aderenta)presupunand ca vehiculul nu se rastoarna si neglijand rezistenta la rulare
αmaxmn μ hg, a, ( ) atan μLam a−
Lam μ hg⋅+⋅
⎛⎜⎝
⎞⎟⎠
:= tractiune pe fata
tractiune pe spateαmaxnm μ hg, a, ( ) atan μ
aLam μ hg⋅−
⋅⎛⎜⎝
⎞⎟⎠
:=
αmaxmm μ( ) atan μ( ):= tractiune integrala

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 8 Prof.dr.ing. Ion Preda
μad 0 0.05, 1.4..:=
0 0.2 0.4 0.6 0.8 1 1.2 1.40
10
20
30
40
50
60
Tract. fata inc.Tract. spate inc.Tract. integralaTract. fata desc.Tract. spate desc.
Rampa maxima realizabila
αmaxmn μad hi, ai, ( )deg
αmaxnm μad hi, ai, ( )deg
αmaxmm μad( )deg
αmaxmn μad hd, ad, ( )deg
αmaxnm μad hd, ad, ( )deg
μad
Conditii normale (pe drum)
αmaxNi αmaxmm μN( ):= αmaxNi 40.36 deg⋅=tractiune integrala
αmaxNd αmaxmm μN( ):= αmaxNd 40.36 deg⋅=
Conditii dificile (in teren)
αmaxRi αmaxmm μR( ):= αmaxRi 38.66 deg⋅=
tractiune integralaαmaxRd αmaxmm μR( ):= αmaxNd 40.36 deg⋅=
Fortele si puterile de rezistenta Forta de rezistentă aerodinamica Ra va( ) kaer Saer⋅ va2
⋅:=
Forta de rezistentă la rulare Rr α( ) fV Gi⋅ cos α( )⋅:=
Forta de rezistentă la urcarea pantei Rp α( ) Gi sin α( )⋅:=
Forta de rezistentă totală Rtot va α, ( ) Rr α( ) Rp α( )+ Ra va( )+:=
Puterea rezistentă a aerului Pa va( ) Ra va( ) va⋅:=
Puterea rezistentă la rulare Pr va α, ( ) Rr α( ) va⋅:=
Puterea rezistentă la urcarea pantei Pp va α, ( ) Rp α( ) va⋅:=
Puterea rezistentă totală Ptot va α, ( ) Rtot va α, ( ) va⋅:=

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 9 Prof.dr.ing. Ion Preda
Stabilirea puterii necesare pt obtinerea vitezei maxime
Puterea de rezistenta a aerului
Pav Pa vmax( ):= Pav 98.2 kW⋅=
Puterea de rezistenta la rulare
Prv Pr vmax αv, ( ):= Prv 12.9 kW⋅=
Puterea la roata necesara atingerii vitezei maxime (se neglijeaza patinarea rotilor)
PRtv Ptot vmax αv, ( ):= PRtv 111.1 kW⋅=
Puterea motorului necesara obtinerii vitezei maxime
PvmaxPRtv
ηest:= Pvmax 120.8 kW⋅=
Adoptarea motorului
Puterea nominala a motorului PN 125 kW⋅:=
Turatia nominală a motorului nN 4200rotmin
⋅:=
MM 350N m⋅:=Momentul maxim al motorului
Turatia motorului la momentul maxim nM 1750rotmin
⋅:=
momentul nominal al motorului MNPN
nN:= MN 284 N m⋅⋅=
puterea la turatia momentului maxim PM MM nM⋅:= PM 64 kW⋅=
coeficientul de elasticitate al motorului cenM
nN:= ce 0.42=
coeficientul de adaptabilitateca
MM
MN:= ca 1.232=
turatia maximă a motorului nmax 1.07nN:= nmax 4700rotmin
:=
turatia minimă de mers stabil în sarcină nmin 1000rotmin
⋅:=
Momentul de inertie al motoruluiJm 0.5 kg⋅ m2
⋅:=

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 10 Prof.dr.ing. Ion Preda
Caracteristica externăDe prezentat si relatiile teoretice de calculul al cuplului
Pe baza datelor statistice ale motoarelor studiate s-a adoptat forma caracteristicii externe
Np
1000
1100
1200
1300
1400
1500
1600
1700
1800
1900
2000
2100
2200
2300
2400
2500
2600
2700
2800
2900
3000
3100
3200
3300
3400
3500
3600
3700
3800
3900
4000
4100
4150
4200
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
rotmin
⋅:= Mp
143
182
215
257
286.48
318.31
366.45
377.48
376.67
374.43
377.2
377.42
375.46
373.67
370.04
366.69
363.61
360.75
358.1
355.63
351.73
347.47
342.58
337.7
331.42
326.04
319.64
313.58
307.84
301.17
295.55
289.74
286.94
284.21
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
N⋅ m⋅:=

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 11 Prof.dr.ing. Ion Preda
Forma curbei de moment se obtine prin interpolare cu o functie spline Coef cspline Np Mp, ( ):=
Mext n( ) interp Coef Np, Mp, n, ( ):= Mreg n( )nmax n−
nmax nN−MN⋅:=
M n( ) if n nN< Mext n( ), Mreg n( ), ( ):=
Puterea motorului se obtine
P n( ) M n( ) n⋅:=
Curba consumului specific
Se adoptă următorii parametri:consumul specific la turatie nominală cN 280
gmkW hr⋅
⋅:=
α11 1.55:= α21 1.55:= α31 1:=
Curba consumului orar
ChN cN PN⋅:= ChN 35kghr
⋅= ChgChN
3:= Chg 11.67
kghr
⋅=
c1e ne( ) cN α11 α21ne
nN⋅− α31
ne
nN
⎛⎜⎝
⎞⎟⎠
2
⋅+⎡⎢⎢⎣
⎤⎥⎥⎦
⋅:=
Ch ne( ) if ne nN≤ c1e ne( ) P ne( )⋅, Chg ChN Chg−( )nmax ne−
nmax nN−⋅+,
⎡⎢⎣
⎤⎥⎦
:=
nc nmax 20rpm−:= turatia pana la care se doreste calculul consumului specific
ce ne( ) if ne nc<Ch ne( )P ne( ),
Ch nc( )P nc( ),
⎛⎜⎝
⎞⎟⎠
:=
n nmin nmin 50 rpm⋅+, nmax..:=

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 12 Prof.dr.ing. Ion Preda
0 1000 2000 3000 4000 50000
200
400
600
Moment motorPutereaConsum orarConsum specific
CARACTERISTICA EXTERNA
M n( )
N m⋅
P n( )
kW5⋅
Ch n( )
kghr
10⋅
ce n( )
kghr kW⋅
500
n
rpm
Schema cinematica a autovehiculului

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 13 Prof.dr.ing. Ion Preda
Randamentul transmisiei
Pe baza schemei cinematice se adopta randamentele transmisiei pe treptecutia de viteze
ηcv1 0.975 0.98⋅:= 2 angrenaje cilindrice (0.977) ηcv1 0.955=
ηcvV 0.98:= priza directa
ηcvE 0.975 0.975⋅:= 2 angrenaje cilindrice (0.975) ηcvE 0.951=
reductorul central η0 0.96:=
ηpl 0.993:=arborii planetaricutia de distributie
ηcdN 0.98:= ηcdR 0.975 0.975⋅:=
Randamentul transmisiei in:
priza directa ηtrV ηcvV ηcdN⋅ η0⋅ ηpl⋅:= ηtrV 0.916=
treapta normala a cutiei de distributie ηtrN ηcv1 ηcdN⋅ η0⋅ ηpl⋅:= ηtrN 0.893=
treapta redusa a cutiei de distributie ηtrR ηcv1 ηcdR⋅ η0⋅ ηpl⋅:= ηtrR 0.866=
treapta economica ηtrE ηcvE ηcdN⋅ η0⋅ ηpl⋅:= ηtrE 0.888=
Calculul vitezei maxime a autovehiculului
Punctul de functionare pe caracteristica externa
nvmax 0.98 nN⋅:= nvmax 4116rotmin
⋅=
Pvmax P nvmax( ):= Pvmax 124.49 kW⋅=
Termenul AvGi ψv⋅
kaer Saer⋅:= Av 367
ms
⎛⎜⎝
⎞⎟⎠
2⋅=
Termenul BvηtrV Pvmax⋅
kaer Saer⋅:= Bv 170662
ms
⎛⎜⎝
⎞⎟⎠
3⋅=
Viteza maximă a autovehiculului va fi
vmax
3Bv
2
Bv
2
⎛⎜⎝
⎞⎟⎠
2 Av
3
⎛⎜⎝
⎞⎟⎠
3
++
3Bv−
2
Bv
2
⎛⎜⎝
⎞⎟⎠
2 Av
3
⎛⎜⎝
⎞⎟⎠
3
++−:=
vmax 53.3ms
⋅= vmax 192kmhr
⋅=

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 14 Prof.dr.ing. Ion Preda
Determinarea rapoartelor de transmitere din cutia de vitezeAdoptarea unui raport de transmitere pentru cutia de viteze si pentru cutia de distributie
Se adoptă raportul treptei în care se obtine viteza maximăicvV 1:= pentru priza directa
Raportul de transmitere al reductorului in gama normalaicdN 1.07:=
Raportul de transmitere al transmisiei principaleRaportul de transmitere al transmisiei principale
i0nvmax rd⋅
icvV icdN⋅ vmax⋅:= i0 2.294=
Raportul de transmitere al primei trepte a cutiei de viteze
Raportul de transmitere al treptei întâi trebuie să se încadreze între următoarele valori:
Ga ψmax⋅ rd⋅
MM ηtrN⋅ i0⋅ icd⋅icv1≤
mN Ga⋅ μ⋅ rd⋅
MM ηtrN⋅ i0⋅ icd⋅≤
Gi ψmaxN⋅ rd⋅
MM ηtrN⋅ i0⋅ icdN⋅3.267=
mNi Gi⋅ μN⋅ rd⋅
MM ηtrN⋅ i0⋅ icdN⋅5.244=
icv1Gi ψmaxN⋅ rd⋅
MM ηtrN⋅ i0⋅ icdN⋅:= icv1 3.267=
Din necesitatea de a proteja motorul si ambreajul, precum si pentru a se putea realizaviteze mici de deplasare pe drum in treapta intai se adopta
icv1 3.6:=
Calculul initial al rapoartelor de transmitere ale treptelor de vitezăse face initial prin metodaetajării in progresie geometrică. Se alege o ratie initiala a progresiei in care vor fi realizaterapoartele de transmitere ale cutie de viteze.
q0nN
nM 1000rotmin
⋅+
:= q0 1.53=
Numărul treptelor de viteze necesar pentru demaraj (fara o eventuala treapta economica)
Ntr 1
lnicv1
icvV
⎛⎜⎝
⎞⎟⎠
ln q0( )+:= Ntr 4.02=
Se adopta numărul treptelor de viteză de mers inainte (cu o treapta economica)Ntr 5:=
Valoarea ratiei geometrice va fi q
Ntr 2−icv1
icvV:= q 1.533=

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 15 Prof.dr.ing. Ion Preda
Rapoartele de transmitere initiale ale trepteloricv4 icvV:= icv4 1=
icv3 icvV q⋅:= icv3 1.533=
icv2 icvV q2⋅:= icv2 2.349=
icv5 0.82 icvV⋅:= icv5 0.82=
De dezvoltat calculul raportului de transmitere al treptei economicevE n( ) n
rdicv5 icdN⋅ i0⋅
⋅:=
Prez5 n( ) fv Gi⋅ kaer Saer⋅ vE n( )2⋅+⎛⎝
⎞⎠
vE n( )
ηtrE⋅:= fv
Valorile optimizate ale rapoartelor treptelor de viteze:
icv3 icvV q⋅ 0.9⋅:= icv3 1.379=
icv2 icv3 q⋅:= icv2 2.114=
icv1 3.6= icv2 2.11= icv3 1.38= icv4 1= icv5 0.82=
Raportul de transmitere al treptei reduse a cutiei de distributie
Raportul de transmitere al treptei întâi trebuie să se încadreze între următoarele valori:
Gi ψmaxR⋅ rd⋅
MM ikI⋅ i0⋅ ηtrR⋅icdR<
cos αmaxR( ) Gi⋅ ϕR⋅ rd⋅
MM ikI⋅ i0⋅ ηtrR⋅<
Gi ψmaxR⋅ rd⋅
MM icv1⋅ i0⋅ ηtrR⋅1.467=
cos αmaxR( ) Gi⋅ μR⋅ rd⋅
MM icv1⋅ i0⋅ ηtrR⋅1.261=
Din necesitatea de a proteja motorul si ambreajul la pornirile in rampa, precum sipentru a avea viteze mici de deplasare in teren accidentat se adopta
icdR 1.5:=
Randamentele totale pe trepte in gama normala a cutiei de distributie
ηtr1 ηcv1 ηcdN⋅ η0⋅ ηpl⋅:= ηtr1 0.893=
ηtr4 ηcvV ηcdN⋅ η0⋅ ηpl⋅:= ηtr4 0.916=
ηtr2 ηtr4:= ηtr2 0.916=
ηtr3 ηtr4:= ηtr3 0.916=
ηtr5 ηcvE ηcdN⋅ η0⋅ ηpl⋅:= ηtr5 0.888=
Coeficientii maselor in miscare de rotatie in functie de treapta
Determinarea maselor echivalente in diferite trepte de viteza:
δ Jmot icv, icd, masa, ( ) 1Jmot icv icd⋅ i0⋅( )2⋅ Jr+
masa rd2
⋅+:=

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 16 Prof.dr.ing. Ion Preda
δ1i δ Jm icv1, icdN, mi, ( ):= δ1i 1.268= δ1d δ Jm icv1, icdN, md, ( ):= δ1d 1.346=
δ2i δ Jm icv2, icdN, mi, ( ):= δ2i 1.112= δ2d δ Jm icv2, icdN, md, ( ):= δ2d 1.145=
δ3i δ Jm icv3, icdN, mi, ( ):= δ3i 1.065= δ3d δ Jm icv3, icdN, md, ( ):= δ3d 1.084=
δ4i δ Jm icv4, icdN, mi, ( ):= δ4i 1.049= δ4d δ Jm icv4, icdN, md, ( ):= δ4d 1.063=
δ5i δ Jm icv5, icdN, mi, ( ):= δ5i 1.043= δ5d δ Jm icv5, icdN, md, ( ):= δ5d 1.055=
δai δJm
100icv5, icdN, mi,
⎛⎜⎝
⎞⎟⎠
:= δai 1.031= δad δJm
100icv5, icdN, md,
⎛⎜⎝
⎞⎟⎠
:= δad 1.039=
Vitezele pe trepte ce corespund treptei normale a cutiei de distributie
v1 n( ) nrd
icv1 icdN⋅ i0⋅⋅:= v2 n( ) n
rdicv2 icdN⋅ i0⋅
⋅:= v3 n( ) nrd
icv3 icdN⋅ i0⋅⋅:=
v4 n( ) nrd
icv4 icdN⋅ i0⋅⋅:= v5 n( ) n
rdicv5 icdN⋅ i0⋅
⋅:=
Vitezele pe trepte ce corespund treptei reduse a cutiei de distributie
v1R n( ) nrd
icv1 icdR⋅ i0⋅⋅:= v2R n( ) n
rdicv2 icdR⋅ i0⋅
⋅:= v3R n( ) nrd
icv3 icdR⋅ i0⋅⋅:=
v4R n( ) nrd
icv4 icdR⋅ i0⋅⋅:= v5R n( ) n
rdicv5 icdR⋅ i0⋅
⋅:=
Turatiille la care se face schimbarea treptelor de viteze in timpul demarajului
n1min nM:= n1max nN:= n1max 4200rotmin
⋅=
n2min n1maxicv2
icv1⋅:= n2min 2466
rotmin
⋅= n2max nN:=
n3min n2maxicv3
icv2⋅:= n3min 2740
rotmin
⋅= n3max nN:=
n4min n3maxicv4
icv3⋅:= n4min 3045
rotmin
⋅= n4max nvmax:= n4max 4116rotmin
⋅=
Valorile vitezelor de schimbare a diferitelor trepte de viteze
v1min v1 n1min( ):= v1min 22.65kmhr
⋅= v1max v1 n1max( ):= v1max 54.351kmhr
⋅=
v2min v2 n2min( ):= v2min 54.35kmhr
⋅= v2max v2 n2max( ):= v2max 92.556kmhr
⋅=
v3min v3 n3min( ):= v3min 92.556kmhr
⋅= v3max v3 n3max( ):= v3max 39.403ms
⋅=
v4min v4 n4min( ):= v4min 141.853kmhr
⋅= v4max v4 nvmax( ):= v4max 191.75kmhr
⋅=

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 17 Prof.dr.ing. Ion Preda
0 500 1000 1500 2000 2500 3000 3500 4000 45000
25
50
75
100
125
150
175
200
225
250Caracteristica vitezelor
M n( )
2N m⋅
2 P n( )
kW
v1 n( )
kph
v2 n( )
kph
v3 n( )
kph
v4 n( )
kph
v5 n( )
kph
v1max
kph
v2max
kph
v3max
kph
v4max
kph
v1R n( )
kph
v2R n( )
kph
n
rpm

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 18 Prof.dr.ing. Ion Preda
v 0kmhr
⋅ 1kmhr
⋅, 1.2vmax..:=
Caracteristica de tractiune
De prezentat si limitarea fortei prin aderenta
FR1 n( )M n( ) ηtrN⋅ i0⋅ icv1⋅
rd:= FR2 n( )
M n( ) ηtrN⋅ i0⋅ icv2⋅
rd:= FR3 n( )
M n( ) ηtrN⋅ i0⋅ icv3⋅
rd:=
FR4 n( )M n( ) ηtrN⋅ i0⋅ icv4⋅
rd:= FR5 n( )
M n( ) ηtrN⋅ i0⋅ icv5⋅
rd:=
FR1R n( )M n( ) ηtrR⋅ i0⋅ icv1⋅ icdR⋅
rd:= FR2R n( )
M n( ) ηtrR⋅ i0⋅ icv2⋅ icdR⋅
rd:=
0 25 50 75 100 125 150 175 200 2250
2000
4000
Caracteristica de tractiune
FR1 n( )N
FR2 n( )
N
FR3 n( )
N
FR4 n( )
N
FR5 n( )
N
Rr αv( )N
Rtot v αv, ( )N
v1 n( )
kph
v2 n( )
kph,
v3 n( )
kph,
v4 n( )
kph,
v5 n( )
kph,
v
kph,

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 19 Prof.dr.ing. Ion Preda
Caracteristica de putere
Puterea la roată pentru fiecare treaptă de viteză
PR1 n( ) P n( ) ηtr1⋅:= PR2 n( ) P n( ) ηtr2⋅:= PR3 n( ) P n( ) ηtr3⋅:=
PR4 n( ) P n( ) ηtr4⋅:= PR5 n( ) P n( ) ηtr5⋅:=
0 100 2000
50
100
Caracteristica de putere
Ptot v 0, ( )
kW
Ptot v αa, ( )kW
Ptot v αd, ( )kW
P n( )
kW
PR1 n( )
kW
PR2 n( )
kW
PR3 n( )
kW
PR4 n( )
kW
PR5 n( )
kW
v
kph
v
kph,
v
kph,
v4 n( )
kph,
v1 n( )
kph,
v2 n( )
kph,
v3 n( )
kph,
v4 n( )
kph,
v5 n( )
kph,
Caracteristica dinamică

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 20 Prof.dr.ing. Ion Preda
D1 n( )FR1 n( ) kaer Saer⋅ v1 n( )2⋅−
Gi:= D2 n( )
FR2 n( ) kaer Saer⋅ v2 n( )2⋅−
Gi:=
D3 n( )FR3 n( ) kaer Saer⋅ v3 n( )2⋅−
Gi:= D4 n( )
FR4 n( ) kaer Saer⋅ v4 n( )2⋅−
Gi:=
D5 n( )FR5 n( ) kaer Saer⋅ v5 n( )2⋅−
Gi:=
D1R n( )FR1R n( ) kaer Saer⋅ v1R n( )2⋅−
Gi:= D2R n( )
FR2R n( ) kaer Saer⋅ v2R n( )2⋅−
Gi:=
Panta maxima admisa pe autostrada Panta maxima admisa pe drum national
αa atan5
100⎛⎜⎝
⎞⎟⎠
:= αa 2.86 deg⋅= αd atan10100
⎛⎜⎝
⎞⎟⎠
:= αd 5.71 deg⋅=
0 50 100 1500
0.1
0.2
0.3
0.4
0.5
0.6Caracteristica dinamicã
D1 n( )
D2 n( )
D3 n( )
D4 n( )
D5 n( )
f
f cos αa( )⋅ sin αa( )+
f cos αd( )⋅ sin αd( )+
v1 n( )
kph
v2 n( )
kph,
v3 n( )
kph,
v4 n( )
kph,
v5 n( )
kph,
v
kph,
Panta maxima pe care o poate urca autovehiculul in diferite treptein conditiile asigurarii aderentei

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 21 Prof.dr.ing. Ion Preda
αmax1 n( ) 2 atan1 1 fV
2+ D1 n( )2−−
fV D1 n( )+
⎛⎜⎜⎝
⎞⎟⎟⎠
⋅:= αmax2 n( ) 2 atan1 1 fV
2+ D2 n( )2−−
fV D2 n( )+
⎛⎜⎜⎝
⎞⎟⎟⎠
⋅:=
αmax3 n( ) 2 atan1 1 fV
2+ D3 n( )2−−
fV D3 n( )+
⎛⎜⎜⎝
⎞⎟⎟⎠
⋅:= αmax4 n( ) 2 atan1 1 fV
2+ D4 n( )2−−
fV D4 n( )+
⎛⎜⎜⎝
⎞⎟⎟⎠
⋅:=
αmax5 n( ) 2 atan1 1 fV
2+ D5 n( )2−−
fV D5 n( )+
⎛⎜⎜⎝
⎞⎟⎟⎠
⋅:=
αmax1R n( ) 2 atan1 1 fV
2+ D1R n( )2−−
fV D1R n( )+
⎛⎜⎜⎝
⎞⎟⎟⎠
⋅:= αmax2R n( ) 2 atan1 1 fV
2+ D2R n( )2−−
fV D2R n( )+
⎛⎜⎜⎝
⎞⎟⎟⎠
⋅:=
αmax1 nM( ) 30.69 deg⋅= 100 tan αmax1 nM( )( )⋅ 59.35= %
αmax1R nM( ) 48.79 deg⋅= 100 tan αmax1R nM( )( )⋅ 114.21= %
0 50 100 150 2005−
0
5
10
15
20
25
30
35
40
45
50
αmax1 n( )
deg
αmax2 n( )
deg
αmax3 n( )
deg
αmax4 n( )
deg
αmax5 n( )
deg
0
αmax1R n( )
deg
αmax2R n( )
deg
v1 n( )
kph
v2 n( )
kph,
v3 n( )
kph,
v4 n( )
kph,
v5 n( )
kph,
v
kph,
v1R n( )
kph,
v2R n( )
kph,
Diagrama acceleratiilor
a1 n( ) gD1 n( ) ψv−
δ1i⋅:= a2 n( ) g
D2 n( ) ψv−
δ2i⋅:= a3 n( ) g
D3 n( ) ψv−
δ3i⋅:=

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 22 Prof.dr.ing. Ion Preda
a4 n( ) gD4 n( ) ψv−
δ4i⋅:= a5 n( ) g
D5 n( ) ψv−
δ5i⋅:=
0 25 50 75 100 125 150 175 2000.5−
0
0.5
1
1.5
2
2.5
3
3.5
4Diagrama acceleratiei
a1 n( )
m
s2
a2 n( )
m
s2
a3 n( )
m
s2
a4 n( )
m
s2
a5 n( )
m
s2
0m
s2
⋅
v1 n( )
kph
v2 n( )
kph,
v3 n( )
kph,
v4 n( )
kph,
v5 n( )
kph,
v
kph,
Turatiile de schimbare a treptelor pentru obtinerea demarajului optim
n1max nN:=
Given
a1 n1max( ) a2 n1maxicv2
icv1⋅
⎛⎜⎝
⎞⎟⎠
=
n1max Find n1max( ):= n1max 4273 rpm⋅= n2min n1maxicv2
icv1⋅:= n2min 2509 rpm⋅=
n2max nN:=

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 23 Prof.dr.ing. Ion Preda
Given
a2 n2max( ) a3 n2maxicv3
icv2⋅
⎛⎜⎝
⎞⎟⎠
=
n2max Find n2max( ):= n2max 4274 rpm⋅= n3min n2maxicv3
icv2⋅:= n3min 2789 rpm⋅=
n3max nN:=
Given
a3 n3max( ) a4 n3maxicv4
icv3⋅
⎛⎜⎝
⎞⎟⎠
=
n3max Find n3max( ):= n3max 4253 rpm⋅= n4min n3maxicv4
icv3⋅:= n4min 3083 rpm⋅=
Vitezele de schimbare a treptelor pentru obtinerea demarajului optim
v1min 22.6 kph⋅= turatia la care se cupleaza ambreiajul in treapta intai (de cuplu maxim
v1max v1 n1max( ):= v1max 55.3kmhr
⋅= v2max v2 n2max( ):= v2max 94.2kmhr
⋅=
v3max v3 n3max( ):= v3max 39.9ms
⋅= v4max v4 nvmax( ):= v4max 191.8kmhr
⋅=
Acceleratia in functie de vitezaCalculul timpului si spatiului de demarare se face până la atingerea vitezei 0,9⋅vmax
vdem 0.9 vmax⋅:= vdem 173 kph⋅= vd 0 kph⋅ 0.2 kph⋅, vdem..:=
ri1rd
i0 icdN⋅ icv1⋅( ):= ri2rd
i0 icdN⋅ icv2⋅( ):= ri3rd
i0 icdN⋅ icv3⋅( ):= ri4rd
i0 icdN⋅ icv4⋅( ):=
av1 va( ) if va v2max≤ if va v1max≤ a1vari1
⎛⎜⎝
⎞⎟⎠
, a2vari2
⎛⎜⎝
⎞⎟⎠
, ⎛⎜⎝
⎞⎟⎠
, if va v3max≤ a3vari3
⎛⎜⎝
⎞⎟⎠
, a4vari4
⎛⎜⎝
⎞⎟⎠
, ⎛⎜⎝
⎞⎟⎠
, ⎛⎜⎝
⎞⎟⎠
:=
av va( ) if va v1min≤δ1i
δaia1
v1min
ri1
⎛⎜⎝
⎞⎟⎠
, av1 va( ), ⎛⎜⎝
⎞⎟⎠
:=
0 50 100 150 2000
1
2
3
4
5
av v( )
av vdem( )
v
kph
Timpul de demarareTimpul de demarare in functie de viteza

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 24 Prof.dr.ing. Ion Preda
td va( )
0
va
va1
av va( )
⌠⎮⎮⌡
d:= tdtot td vdem( ):= tdtot 46.35 s=
Timpul de demaraj necesar pentru atingerea vitezei de 100km/h are valoarea:
td 100kmhr
⋅⎛⎜⎝
⎞⎟⎠
10.3 s⋅=
0 50 100 1500
10
20
30
40
td vd( )s
td 100 kph⋅( )
s
vd
kph
Spatiul de demarareSpatiul de demaraj are următoarea expresie:
Sd va( )
0
va
vava
av va( )
⌠⎮⎮⌡
d:= Sdtot Sd vdem( ):= Sdtot 1660 m=
0 50 100 1500
500
1000
1500
Sd vd( )m
500
1000
vd
kph
Viteza la care se ajunge in momentul cuplarii ambreiajului

Universitatea "TRANSILVANIA" Ex. - calcul tractiune - 25 Prof.dr.ing. Ion Preda
v1min 22.6 kph⋅=
Timpul cat patineaza ambreiajul la demarare de pe loctd v1min( ) 1.3 s=
Spatiul parcurs pana in momentul cuplarii ambreiajuluiSd v1min( ) 4.09m=
Viteza la care se ajunge dupa 1 km distanta de demarare v1000 vdem:=
Given
Sd v1000( ) 1000m=
v1000 173 kph⋅=v1000 Find v1000( ):=
Timpul necesar parcurgerii unui kilometru cu demarare de pe loctd v1000( ) 32.1s=
Acceleratia in functie de timpul si spatiul de demarare
0 10 20 30 400
1
2
3
4
5
av vd( )m
s2
td vd( )s
0 500 1000 15000
1
2
3
4
5
av vd( )m
s2
Sd vd( )m
Viteza in functie de timpul si spatiul de demarare
0 10 20 30 400
50
100
150
vd
kph
td vd( )s
0 500 1000 15000
50
100
150
vd
kph
Sd vd( )m