ppt gsasd_2.pptx
23
LOSS & TORQUE OPTIMIZATION OF 3φ INDUCTION MOTOR USING GRAVITATIONAL SEARCH ALGORITHM
-
Upload
mainak-bhattacharjee -
Category
Documents
-
view
27 -
download
0
description
Gravitational search algorithm
Transcript of ppt gsasd_2.pptx

LOSS & TORQUE OPTIMIZATION OF 3φ INDUCTION MOTOR USING
GRAVITATIONAL SEARCH ALGORITHM

Y=3x^2+2x+4minimize or maximize??

• Y=X^2+p^2+q^37.5<=x<=12;3<=p<=5;2<=q<=4;
optimum value of Y=?


What is GSA??



Gravitational Search Algorithm1.GSA is constructed based on the law of gravity and the notion of mass interactions.
E.Rashedi is the man who first applied it.
2. In GSA, we have an isolated system of masses. Using the gravitational force, every mass in the system can see the situation of other masses. The gravitational force is therefore a way of transferring information between different masses

In GSA, agents are considered as objects and their performance is measured by their masses. All these objects attract each other by a gravity force, and this force causes a movement of all objects globally towards the objects with heavier masses.
The heavy masses correspond to good solutions of the problem.The position of the agent corresponds to a solution of the problem, and its mass is determined using a fitness function.

Equations Involved

• X= (x (i,1),.... x(i,d).... x(i,n) ) for i=1,2....N
• M(i,t)= [m(i,t)] / • best(t)= (j € {1.........N}) fit(j,t) . worst(t)= max(j € {1.........N}) fit(j,t)F (i,d,t)=
a(i,d,t)=
• V(i,d,t+1)= rand*v(i,d,t)+a(i,d,t);• X(i,d,t+1)= x(i,d,t)+v(i,d,t+1);G(t)=G(0)*exp(-ß *t/t_max )
• Xid represents the position of i th agent in d dimension
• Mass calculation
• Total force on ith particlewhere randj is a random number in the interval [0, 1], G(t) is the gravitational constant at time t, M(i) and M(j) are masses of agents i and j, ε is a small value and R(i,j,t) is the Euclidean distance between two agents, i and j.
• Velocity & position update• Gravitational constant update

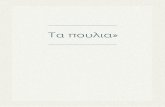
Specify the parameters of GSA.
Set iteration count(t)=1
Generate a random initial population
Evaluate fitness function for each agent
Update the best and worst of the population
Calculate the total force for each agent
Calculate the acceleration for each agent
Update the velocity and position
t > t_max terminate
t=t-1
Flowing chart showing the application of GSA

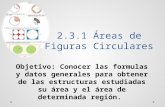
Rs LsRr/s Lr
LmRc
stator Rotor

loss loss lossloss
GSA based 3-phase induction motor design for minimum losses

Loss expression and approach to minimization
• P(loss,total)= stator copper loss + rotor copper loss + core loss.• • P(loss,total)= Is^2R(s)+Ir^2R(r)+V(m)^2/R(c)• • =v^2[(Z2+Zm)^2/Z(T)*Rs+(z(m)/z(T))^2/R(r)+(z(2)z(m))^2/z(T)/R(c)• • Where Z1 =R(s)+j 2∏fL(s)• • Z2= R(r)/s +j2∏fL(r)• • Z(m)= • Z (T)=Z1 Z2+ Z1*Z(m)+ Z2 * Z(m)• • Slip(s)=N(s)-N(m)/N(s)

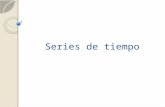
60 80 100 120 140 160 180 200 220
4
6
8
Voltage
Resis
tanc
e
Resistance
stator resistance rotor resistance

60 80 100 120 140 160 180 200 220
0.01
0.02
0.03
0.04
0.05
voltage
Indu
ctan
ce
Inductance
stator inductance rotor inductance

60 80 100 120 140 160 180 200 2200
0.1
0.2
0.3
0.4
Voltage
Tor
que
Voltage vs Torque
conventional test GSA

60 80 100 120 140 160 180 200 2200
10
20
30
Voltage
Loss
Voltage vs Loss
conventional test GSA


1.We have assumed the temp is constant.2.Core loss component in the eqv ckt. is
constant.3.Effect of Harmonics in the loss expression
are neglected.4.Study on time taken for convergence.

?