Poutre droite de section quelconque soumise `a un effort tranchant
15
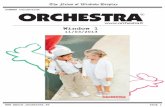
Poutre droite de section quelconque soumise ` a un effort tranchant On consid` ere une poutre cylindrique Ω de longueur L et de section droite 1 courante S de forme a priori quelconque. Les fronti` eres de Ω sont ses extr´ emit´ es, ` a savoir les sections S 0 et S L , et le contour lat´ eral A, de sorte que ∂ Ω= S 0 ∪A∪ S L . Les barycentres des sections S 0 et S L sont respectivement les points O et G L . L’axe 1 du syst` eme de coordonn´ ees cart´ esiennes orthonorm´ ees utilis´ e dans ce probl` eme d´ esigne l’axe du cylindre unissant les barycentres de toutes les sections, comme sur la figure 1. Les axes 2 et 3 sont choisis parall` eles aux directions principales d’inertie des sections droites : S X 2 dS = S X 3 dS = S X 2 X 3 dS =0 Les moments quadratiques principaux des sections sont not´ es : I 3 = S X 2 2 dS, I 2 = S X 2 3 dS Soit R une dimension caract´ eristique de la section, par exemple la plus grande demi–distance entre deux points quelconques de la section. O G L 1 2 3 L S 0 S L S T Fig. 1 – G´ eom´ etrie de la poutre ´ etudi´ ee ainsi que la charge T appliqu´ ee ` a l’extr´ emit´ e S L . La section S L de la poutre est soumise ` a des efforts dont le torseur r´ esultant est {G L , R L , M L } = {G L , T e 2 , 0} o` u T d´ esigne l’effort r´ esultant tangentiel appliqu´ e sur S L et traditionnellement appel´ e effort tranchant. Les surfaces lat´ erales A sont libres de tout effort appliqu´ e. Calculer le torseur {O, R 0 , M 0 } des efforts ` a appliquer ` a la section S 0 pour que la poutre soumise ` a l’effort tranchant pr´ ec´ edent soit en ´ equilibre statique. 1 Une section droite d´ esigne une section perpendiculaire ` a l’axe du cylindre. 1
Transcript of Poutre droite de section quelconque soumise `a un effort tranchant

Poutre droite de section quelconquesoumise a un effort tranchant
On considere une poutre cylindrique Ω de longueur L et de section droite1 courante S deforme a priori quelconque. Les frontieres de Ω sont ses extremites, a savoir les sections S0 etSL, et le contour lateral A, de sorte que ∂Ω = S0 ∪ A ∪ SL. Les barycentres des sections S0
et SL sont respectivement les points O et GL. L’axe 1 du systeme de coordonnees cartesiennesorthonormees utilise dans ce probleme designe l’axe du cylindre unissant les barycentres detoutes les sections, comme sur la figure 1. Les axes 2 et 3 sont choisis paralleles aux directionsprincipales d’inertie des sections droites :∫
S
X2 dS =
∫S
X3 dS =
∫S
X2X3 dS = 0
Les moments quadratiques principaux des sections sont notes :
I3 =
∫S
X22 dS, I2 =
∫S
X23 dS
Soit R une dimension caracteristique de la section, par exemple la plus grande demi–distanceentre deux points quelconques de la section.
Ob
GL
b
1
2
3
L
S0 SLS
T
Fig. 1 – Geometrie de la poutre etudiee ainsi que la charge T appliquee a l’extremite SL.
La section SL de la poutre est soumise a des efforts dont le torseur resultant est
GL, R L, M L = GL, Te 2, 0
ou T designe l’effort resultant tangentiel applique sur SL et traditionnellement appele efforttranchant. Les surfaces laterales A sont libres de tout effort applique.
Calculer le torseur O,R 0,M 0 des efforts a appliquer a la section S0 pour que la poutresoumise a l’effort tranchant precedent soit en equilibre statique.
1Une section droite designe une section perpendiculaire a l’axe du cylindre.
1

L’equilibre statique exige que torseur des efforts appliques a la structure dans son ensemblesoit nul, ce qui implique
R 0 = −R L = −Te 2, M 0 = OGL ∧R 0 −M L = −LTe 3
Il apparaıt qu’il est necessaire d’appliquer un moment −LT sur la section S0 pour contrecarrerle moment cree par rapport au point O par l’effort tranchant applique en SL.
L’essai consistant a appliquer un tel effort tranchant a une poutre s’appelle flexion simple,par opposition a la flexion pure etudiee au chapitre 8.2.2 du cours.
En l’etat, le probleme aux limites considere est mal pose dans la mesure ou seul le torseurdes efforts appliques aux extremites est donne. Lorsque la poutre est suffisamment elancee,i.e. R/L 1, le principe de Saint–Venant permet d’affirmer que la solution du probleme nedepend pratiquement pas de la facon dont ces efforts sont appliques sur S0 et SL. L’objectif duprobleme est donc, d’une part, de proposer une distribution surfacique d’efforts permettant derealiser les torseurs appliques O,R O,M O et GL,R L,M L, et, d’autre part, de resoudrele probleme d’equilibre elastique linearise bien pose correspondant.
La poutre, initialement dans son etat naturel, est constituee d’un materiau homogene decomportement elastique isotrope lineaire. Le module de Young et le coefficient de Poissonsont notes E et ν respectivement. Dans l’ensemble du probleme, on se place dans le cadre del’hypothese des petites perturbations. L’effet de la gravite ou d’efforts volumiques en generaln’est pas pris en compte. La situation envisagee est isotherme et on ne considere pas lesvariations de temperature durant l’essai.
1 Contraintes dans la poutre en flexion simple
Nous allons mettre en œuvre la methode des contraintes pour resoudre le probleme de laflexion simple. Le tenseur des contraintes est recherche de la forme
[σ∼ ] =
σ11 σ12 σ13
σ12 0 0σ13 0 0
(1)
1.1 Dependance des fonctions inconnues
Les composantes des contraintes de la forme (1) sont a priori des fonctions des variablesX1, X2, X3. Montrer toutefois que les composantes de cisaillement σ12 et σ13 ne peuvent pasdependre de X1.
En l’absence de forces de volume et dans le cas statique, les conditions d’equilibre localexigent que la divergence du tenseur des contraintes s’annule en tout point de l’interieur de Ω.En particulier, les conditions
σ21,1 + σ22,2 + σ23,3 = 0, σ31,1 + σ32,2 + σ33,3 = 0
appliquees a la forme proposee (1) excluent la dependance en X1 des composantes decisaillement.
2

1.2 Forme des contraintes
Calculer le champ du tenseur des deformations regnant dans la poutre en fonction descomposantes de contraintes inconnues.
En deduire que la composante axiale de contrainte est de la forme polynomiale suivante :
σ11 = a1X1X2 + a2X1X3 + a3X1 + a4X2 + a5X3 + a6 (2)
ou les (ai)i=1,6 sont six constantes que l’on determinera dans la suite.Montrer egalement que les contraintes de cisaillement sont solutions des deux equations aux
derivees partielles suivantes :
∆2σ12 +a1
1 + ν= 0, ∆2σ13 +
a2
1 + ν= 0 (3)
ou ∆2 = ∂2
∂X22
+ ∂2
∂X23
est l’operateur laplacien bidimensionnel dans le plan (2, 3) des sections
droites de la poutre.
La loi d’elasticite isotrope linearisee par rapport a l’etat naturel fournit
[ε∼] =1
E
σ11 (1 + ν)σ12 (1 + ν)σ13
(1 + ν)σ12 −νσ11 0(1 + ν)σ13 0 −νσ11
(4)
La derivee par rapport a X1 de l’equation d’equilibre local encore inexploitee fournit
σ11,11 + σ12,21 + σ13,31 = σ11,11 = 0
Les equations de compatibilite portant sur les composantes des deformations conduisent auxconditions suivantes sur les composantes des contraintes
σ11,22 = 0, σ11,33 = 0, σ11,23 = 0
Ces trois conditions conduisent a la forme (2).Les deux conditions de compatibilite non encore exploitees exigent que
(1 + ν)σ12,23 − (1 + ν)σ31,22 + νa2 = 0, (1 + ν)σ13,23 − (1 + ν)σ12,33 + νa1 = 0
Or, les derivees de la premiere equation d’equilibre par rapport a X2 et X3 indiquent que :
σ12,23 = −σ13,33 − a2, σ13,23 = −σ12,22 − a1
La combinaison de ces resultats conduit aux equations de Poisson (3).
1.3 Determination des contraintes de cisaillement
Montrer quea1X2 + a2X3 + a3 + σ12,2 + σ13,3 = 0 (5)
et, par consequent, que
∂
∂X2
(a3
2X2 + a2X2X3 + σ12 + f(X3)
)=
∂
∂X3
(−a3
2X3 − a1X2X3 − σ13 − g(X2)
)(6)
3

ou f et g sont des fonctions derivables arbitraires.En deduire qu’il existe une fonction ψ(X2, X3) permettant d’exprimer les contraintes de
cisaillement sous la forme :
σ12 =∂ψ
∂X3
− a3
2X2 − a2X2X3 − f(X3) (7)
σ13 = − ∂ψ
∂X2
− a3
2X3 − a1X2X3 − g(X2) (8)
Montrer enfin que l’on peut choisir f et g de telle sorte que la fonction ψ soit solution del’equation
∆2ψ = A (9)
ou A est une constante encore indeterminee.
La relation (5) est une consequence de la premiere equation d’equilibre locale portant sur lescontraintes, une fois que l’expression polynomiale (2) est prise en compte. La relation (6) s’endeduit. On considere alors la forme differentielle
α(X2, X3) = b(X2, X3)dX2 + a(X2, X3)dX3
avec
a(X2, X3) =a3
2X2 + a2X2X3 + σ12 + f(X3), b(X2, X3) = −a3
2X3 − a1X2X3 − σ13 − g(X2)
La relation (6) signifie que ∂b/∂X3 = ∂a/∂X2. Il s’ensuit que la forme differentielle α est exacte.Il existe2 donc une fonction ψ(X2, X3) telle que α = dψ. Les relations (7) et (8) s’en deduisent.On utilise ensuite le fait que les contraintes de cisaillement verifient les equations de Poisson(3) :
∆2σ12 =∂
∂X3
∆2ψ − f”(X3) = − a1
1 + ν
∆2σ13 = − ∂
∂X2
∆2ψ − g”(X2) = − a2
1 + ν
Le choix
f(X3) =a1
1 + ν
X23
2, g(X2) =
a2
1 + ν
X22
2
implique que le gradient de ∆2ψ est nul et que par consequent le laplacien de ψ est constant.
1.4 Forces et moments resultants
Montrer que l’on peut determiner les constantes du polynome (2) en fonction des conditionsde chargement de la poutre :
a2 = a3 = a5 = a6 = 0
a1 =T
I3, a4 = −LT
I3
2En toute rigueur, le resultat est obtenu pour une section de poutre simplement connexe. La presence detrous au sein de la section ajoute des conditions sur les bords interieurs des trous.
4

Le champ des contraintes prend ainsi la forme
σ11 =T
I3X2(X1 − L), σ12 =
∂ψ
∂X3
− a1
1 + ν
X23
2, σ13 = − ∂ψ
∂X2
− a1X2X3 (10)
La forme des contraintes normales σ11 evoque les contraintes etablies dans le cas de la flexionpure mais avec un moment variable T (X1 − L) dependant de la position X1. C’est ainsi quel’application d’un effort tranchant s’accompagne necessairement d’une composante de flexion,ce qui justifie la denomination de flexion simple egalement attachee a cet essai.
Les forces resultantes normales aux sections S0 et SL sont nulles :∫S0
σ11dS = a6S = 0,
∫SL
σ11dS = a3LS + a6S = 0
C’est pourquoi a3 = a6 = 0.On calcule ensuite le moment resultant sur la surface SL :
M L =
∫SL
GLM ∧ (σ∼ · e 1)dS =
∫
SLX2σ13 −X3σ12 dS∫
SLX3σ11 dS∫
SL−X2σ11 dS
= 0
Les moments par rapport aux axes 2 et 3 sont nuls ce qui conduit a
a2LI2 + a5I2 = 0, a1LI3 + a4I3 = 0
Le moment resultant sur la face S0 vaut ensuite
M O =
∫SO
OM ∧ (σ∼ · (−e 1))dS =
∫
S0−X2σ13 +X3σ12 dS∫
S0−X3σ11 dS∫
S0X2σ11 dS
= −LTe 3
ce qui permet de determiner a5I2 = 0, a4I3 = −LT et finalement a2 = 0 et a1 = T/I3.
1.5 Condition sur les surfaces laterales de la poutre
Ecrire la condition qui lie les contraintes en tout point du bord A de la poutre. Interpretercette relation en introduisant la contrainte tangentielle
τ = σ12e 2 + σ13e 3
A ce stade, on ne cherchera pas a exploiter cette condition.
Le vecteur normal en tout point M ∈ A a pour composantes [0, n2, n3]. Le vecteur–contrainteen un tel point est donc
t = (σ12n2 + σ13n3)e 1
Il doit s’annuler car la surface A est libre d’effort, ce qui fournit la condition :
σ12n2 + σ13n3 = 0 (11)
qui indique que la contrainte tangentielle τ est orthogonale a n , ou, autrement dit, qu’elle doitetre tangente au contour exterieur de chaque section de la poutre.
5

2 Determination des deplacements
La methode systematique de construction du champ de deplacement a partir du champ dedeformation etabli dans la partie precedente est maintenant mise en œuvre. Montrer ainsi, auterme d’un travail meticuleux, que le champ de deplacement prend la forme
u1 =a1
EX2
(X2
1
2− LX1 + ν
X22
6− (2 + ν)
X23
2
)+
1 + ν
Eϕ(X2, X3) (12)
u2 =a1
E
(X2
1
2(L− X1
3) +
ν
2(X1 − L)(X2
3 −X22 )
)+
1 + ν
EAX1X3 (13)
u3 = a1ν
E(L−X1)X2X3 −
1 + ν
EAX1X2 (14)
a un mouvement de corps rigide infinitesimal pres. La composante u1, engendree par la flexion,fait intervenir la fonction ϕ(X2, X3), solution, a une constante pres, du systeme d’equations
2∂ψ
∂X3
− AX3 =∂ϕ
∂X2
, −2∂ψ
∂X2
+ AX2 =∂ϕ
∂X3
(15)
Justifier l’existence de cette fonction ϕ.
On rappelle que les composantes non nulles du tenseur des deformations infinitesimales sont
Eε11 = a1X2(X1 − L), Eε22 = Eε33 = −νa1X2(X1 − L)
Eε12 = (1 + ν)∂ψ
∂X3
− a1X2
3
2, Eε13 = −(1 + ν)
∂ψ
∂X2
− a1(1 + ν)X2X3
La methode systematique de construction des deplacements en coordonnees cartesiennesconsiste a calculer le gradient des rotations infinitesimales qui s’exprime en fonction du gradientdes deformations :
ω12,1 = ε11,2 − ε12,1, ω12,2 = ε12,2 − ε22,1, ω12,3 = ε13,2 − ε23,1
dont on deduit la composante de rotation par rapport a l’axe 3 :
ω12 =a1
E
(X1(
X1
2− L) + ν
X22
2− (1 + ν)
X23
2
)+
1 + ν
E(∂ψ
∂X3
− AX3)
Au passage, on a utilise le fait que le laplacien de ψ est egal a la constante A.De meme,
ω23,1 = ε21,3 − ε31,2, ω23,2 = 0, ω23,3 = −ε33,2
ω31,1 = 0, ω31,2 = ε32,1 − ε12,3, ω31,3 = ε33,1 − ε13,3
si bien que
ω23 = a1ν
E(X1 − L)X3 +
1 + ν
EAX1, ω31 =
a1
EX2X3 +
1 + ν
E(∂ψ
∂X2
− AX2) (16)
6

Le gradient du deplacement est la somme des deformations et des rotations infinitesimales :
u1,1 = ε11 =a1
EX2(X1 − L)
u1,2 = ε12 + ω12 =a1
E
(X2
1
2− LX1 + ν
X22
2− (2 + ν)
X23
2
)+
1 + ν
E(2∂ψ
∂X3
− AX3)
u1,3 = ε13 + ω13 = −(2 + ν)a1
EX2X3 −
1 + ν
E(2∂ψ
∂X2
− AX2) (17)
En vue d’integrer les equations precedentes, on peut remarquer que
∂
∂X3
(2∂ψ
∂X3
− AX3) =∂
∂X2
(2−∂ψ∂X2
+ AX2)
en tenant compte du fait que le laplacien de ψ vaut A. Dans le cas d’une section simplementconnexe, il existe donc une fonction ϕ verifiant les conditions (15). Cette fonction permet alorsd’integrer les equations precedentes et d’obtenir la fonction u1(X1, X2, X3).Le calcul de u2 et u3 est plus simple car il ne fait pas intervenir la fonction ϕ mais doit etrefait soigneusement pour aboutir aux expressions annoncees.
2.1 Fonction de gauchissement
La fonction ϕ est appelee fonction de gauchissement. Montrer qu’elle est solution d’unprobleme de Neumann pose sur une section S de contour ∂S, que l’on explicitera.
Verifier que la condition necessaire d’existence d’une solution au probleme de Neumann ainsipose est remplie. On admettra alors qu’une telle solution existe et est unique, a une constantepres.
On verifie d’abord que les relations (15) impliquent que
∂2ϕ
∂X22
+∂2ϕ
∂X23
= 2∂2ψ
∂X3∂X2
− 2∂2ψ
∂X2∂X3
= 0
Les contraintes de cisaillement doivent egalement satisfaire la condition (11) sur le bord ∂S dela section :
σ12n2 + σ13n3 =∂ψ
∂X3
n2 −∂ψ
∂X2
n3 −a1
1 + ν
X23
2n2 − a1X2X3n3 = 0 (18)
En tenant compte des relations (15) liant les fonctions ψ et ϕ, on obtient la condition au bord :
∂ϕ
∂X2
n2+∂ϕ
∂X3
n3 = Gradϕ·n = (a1
1 + νX2
3−AX3)n2+(2a1X2X3+AX2)n3 =: qd(X2, X3) (19)
Il s’agit donc d’une condition de flux du gradient de ϕ impose au bord a la valeur qd. Commeon l’a vu au debut du chapitre consacre a la torsion d’une barre cylindrique, une conditionnecessaire d’existence d’une solution du probleme de Poisson ∆2ϕ = 0 avec la condition debord (19) est que la circulation de qd le long de ∂S soit nulle. On pose :
P = −(2a1X2X3 + AX2), Q =a1
1 + νX2
3 − AX3
7

On calcule alors la circulation de qd le long du contour ∂S grace a la formule de Green :∫∂S
qd dl =
∫∂S
QdX3 + PdX2 =
∫S
(∂Q
∂X2
− ∂P
∂X3
)dX2dX3 =
∫S
2a1X2dX2dX3 = 0
La condition necessaire d’existence de la solution du probleme de Neumann ainsi pose est belet bien remplie.
2.2 Determination de la constante A
A l’aide d’une condition encore inexploitee jusqu’ici, etablir l’equation permettant dedeterminer la constante A apparue dans la formule (9).
Montrer que si la section S admet l’axe 2 comme axe de symetrie, alors la constante A estnulle. On admettra ce resultat si l’on n’a pu l’etablir.
Un autre effet concomitant de l’application d’un effort tranchant a une poutre est une possibletorsion de la poutre. L’effet de torsion est particulierement lisible sur les composantes dedeplacement u2 et u3 au travers des termes proportionnels a A avec les monomes X1X2 etX1X3, similaires a ceux trouves dans l’etude de la torsion d’une barre de section quelconque.Dans le cas present, les moments de torsion M1 appliques aux sections S0 et SL sont nuls, cequi se traduit par la condition :∫
S0
(X2σ13 −X3σ12)dX2dX3 = 0
condition apparue au paragraphe 1.4 mais non exploitee jusqu’ici. En introduisant lesexpressions (10) des contraintes et en tenant compte de (15), la condition suivante est obtenue :∫
S0
(X2∂ϕ
∂X3
−X3∂ϕ
∂X2
)dS − A(I2 + I3) +
∫S0
a1
1 + νX3
3dS = 0 (20)
La premiere integrale peut se transformer de la maniere suivante grace a la formule de Green :∫S0
(∂
∂X3
(X2ϕ)− ∂
∂X2
(X3ϕ))dS = −∫
∂S0
ϕ(X3dX2 +X2dX3)
Cette integrale est invariante si l’on ajoute une constante a ϕ, comme il se doit. L’evaluationde cette integrale requiert la connaissance de ϕ assujettie a la connaissance de la geometriede la section. Toutefois, on peut affirmer qu’elle depend lineairement de A car le probleme deNeumann considere est lineaire par rapport a la constante imposee A. Il s’ensuit que l’equation(20) permet de determiner A sans ambiguıte.On en conclut que l’application d’un effort tranchant sur une poutre de section quelconques’accompagne d’une torsion de la poutre en raison du couplage ainsi mis en evidence.Lorsque la surface est invariante par la symetrie axiale X3 → −X3, l’integrale
∫S0X3
3 dX2dX3
s’annule et, par consequent, la constante A est nulle aussi. Torsion et flexion simple sont alorsdecouplees.
3 Cas d’une poutre de section circulaire
Les resultats precedents sont maintenant explicites dans le cas d’une poutre en forme decylindre de revolution. La section de la poutre correspond alors a un disque de rayon R.
8

3.1 Fonction de gauchissement pour une section circulaire
Dans le cas d’une section circulaire, la fonction ϕ prend la forme polynomiale suivante quel’on admettra3 :
ϕ(X2, X3) = a13 + 2ν
4(1 + ν)(X2
3X2 −X3
2
3+R2X2) (21)
Verifier qu’il s’agit bel et bien de la solution, a une constante pres, du probleme de Neumannpose au paragraphe 2.1.
Comme la section circulaire presente une symetrie centrale, la constante A est nulle d’apresles resultats du paragraphe 2.2. On trouve alors effectivement que
∂2ϕ
∂X22
= −a13 + 2ν
2(1 + ν)X2 = − ∂2ϕ
∂X23
=⇒ ∆ϕ = 0
Dans le cas circulaire, le systeme de coordonnees cylindriques devient avantageux :
X2 = r cos θ, X3 = r sin θ, n = [0 cos θ sin θ]T , 0 ≤ r ≤ R, θ ∈ [0, 2π]
ou n est la normale a la surface laterale A. Nous allons verifier que la condition de bord (19)est satisfaite. Pour cela, on voit d’une part que
a1
1 + νX2
3n2 + 2a1X2X3n3 = a13 + 2ν
1 + νR2 sin2 θ cos θ
et d’autre part que
∂ϕ
∂X2
R2 cos θ +∂ϕ
∂X3
R2 sin θ = a13 + 2ν
1 + νR2 sin2 θ cos θ
3.2 Etude du contexte infinitesimal
Dans le cas d’une section circulaire, les champs de deplacements (12) a (14) prennent la formesuivante :
u1 =a1
EX2
(X1(
X1
2− L)− 1
4(X2
2 +X23 ) +
1 + 2ν
4R2
)(22)
u2 =a1
E
(X2
1
2(L− X1
3) +
ν
2(X1 − L)(X2
3 −X22 )
)(23)
u3 = a1ν
E(L−X1)X2X3 (24)
Donner les conditions portant sur T,E,R et L garantissant que les transformations obtenuesrestent infinitesimales. En notant ε = R/L 1 l’elancement de la poutre, identifier quelle estla condition la plus severe ?
Calculons d’abord le moment quadratique pour une section circulaire :
I3 = I2 =πR4
4
3De maniere equivalente, on a ψ(X2, X3) = a13+2ν
8(1+ν) (X3
33 −X3X2 +R2X3).
9

Les composantes du gradient du champ des deplacements doivent rester suffisamment petites.En particulier, la solution proposee est licite a condition que :
|u1,1| = |a1
EX2(X1 − L)| ≤
∣∣∣a1
ERL
∣∣∣ ∼ |T |ER2
L
R 1
|u1,3| =∣∣∣a1
EX2X3
∣∣∣ ≤ ∣∣∣a1
ER2
∣∣∣ ∼ |T |ER2
1
Une condition supplementaire est obtenue en exigeant que
|u1,2| 1 =⇒∣∣∣a1
EL2
∣∣∣ ∼ |T |ER2
L2
R2 1
L’analyse des autres composantes n’apporte pas de nouvelle restriction. En remarquant quel’elancement R/L = ε doit etre suffisamment petit pour que le principe de Saint-Venant puisses’appliquer, les trois conditions precedentes peuvent etre reecrites respectivement sous la forme :
|T |ER2
ε,|T |ER2
1,|T |ER2
ε2
ou il apparaıt que c’est la derniere condition qui est la plus contraignante. Par exemple, sil’elancement est de 0.1, l’effort tranchant applique devra etre plus petit qu’un centieme de laforce ER2. Le fait que le module de Young soit 100 a 1000 fois plus grand que les contraintestypiques supportees par les materiaux laisse une marge de pertinence respectable a la solutionobtenue dans l’hypothese des petites perturbations.
3.3 Deformee de la fibre moyenne et gauchissement de la section
Quelle forme prend la fibre moyenne initialement situee en X2 = X3 = 0?Montrer que les sections droites ne restent pas planes apres deformation. Pour cela on pourra
etudier la deformee de la ligne d’equation X1 = X0, X3 = 0 a X0 fixe. On appelle gauchissementde la surface cet ecart a la planeite que l’on illustrera graphiquement.
La nouvelle position d’un point de la fibre moyenne est donnee par
x1 = X1, x2 = −a1
E
X21
2(X1
3− L), x3 = 0
Le nouveau lieu des points de la ligne moyenne a donc pour equation :
x2 = −a1
E(x3
1
6− L
2x2
1)
Cette forme combine la forme parabolique due a la flexion induite par l’effort tranchant et unterme de degre 3 caracteristique de la flexion simple. La deformee de la poutre est illustree en3D sur la figure 2.Les points de la ligne d’equation X1 = X0, X3 = 0 adoptent la nouvelle position
x1 = X0 +a1
E((X2
0
2− LX1)X2 −
1
4(X3
2 + (1 + 2ν)R2X2))
x2 = X2 +a1
E(LX2
0
2− X3
0
6− ν
2(X0 − L)X2
2 ), x3 = 0
10

3
2
1
3
2
1
Fig. 2 – Poutre de section circulaire encastree d’un cote et soumise a une effort tranchant del’autre : vue 3D montrant egalement le champ de contrainte equivalente de von Mises (valeurspresque nulles en bleu, et maximales en rouge), et vue de profil. L’elancement de la poutre estR/L = 0.05.
Au premier ordre, l’equation de la ligne transformee est
x1 = X0 + x2a1
E(X2
0
2− LX0 +
1 + 2ν
4R2)− x3
2
4
La contribution en X32 represente l’ecart a la planeite.
3.4 Analyse des contraintes et limite d’elasticite
En tout point de chaque section droite, donner l’expression de la contrainte normale a cettesection. A quel(s) endroit(s) la valeur absolue de cette contrainte normale est–elle maximale ?Quelle est la valeur de ce maximum en fonction de |T | et de la geometrie de la poutre.
Montrer que la norme de la contrainte tangentielle ‖τ ‖ est maximale au centre de chaquesection et prend la valeur :
‖τ ‖max = |a1|3 + 2ν
8(1 + ν)R2 =
3 + 2ν
2(1 + ν)
|T |πR2
(25)
Indiquer quelle est, de la contrainte normale maximale et du cisaillement maximal, la contraintedominante.
On suppose que la limite d’elasticite du materiau constitutif de la poutre est bien decrite parun critere de von Mises. Indiquer, qualitativement, a quel endroit de la poutre la plasticite vaapparaıtre en tout premier lieu.
11

3
2
1
Fig. 3 – Champs de contrainte σ12 (a gauche), σ13 (au milieu) et de la contrainte equivalentede von Mises (a droite), dans une section droite situee au milieu de la poutre. Les contraintesde cisaillement ne dependent pas du choix de la section. Les valeurs minimales et maximalessont respectivement bleues et rouges.
Dans le cas de la section circulaire, les contraintes prennent la forme :
σ11 = a1(X1 − L)X2 (26)
σ12 = a13 + 2ν
8(1 + ν)(X2
3 −X22 +R2)− a1
1 + ν
X23
2(27)
σ13 = −a11 + 2ν
4(1 + ν)X2X3 (28)
La contrainte normale a la section en chaque point est σ11. Sa valeur maximale est atteinte enX1 = 0, X2 = ±R et vaut :
|σ11|max = |a1|RL = 4|T |πR2
L
R= 4
|T |πR2
1
ε
Sa dependance en 1/ε en fait une contrainte forte de traction ou de compression en X2 = ±Rselon le signe de T .Les contraintes tangentielles s’expriment plus simplement en coordonnees cylindriques
σ12 = a11 + 2ν
4(1 + ν)r2 sin2 θ + a1
3 + 2ν
8(1 + ν)(R2 − r2), σ13 = −a1
1 + 2ν
4(1 + ν)r2 sin θ cos θ
On calcule alors
σ212+σ
213 =
a21
42(1 + ν)2
((1 + 2ν)2r4 sin2 θ + (1 + 2ν)(3 + 2ν)r2(R2 − r2) sin2 θ + (3 + 2ν)2 (R2 − r2)2
4
)La contrainte tangentielle est donc la plus grande le long de l’axe 3 correspondant a θ = π/2comme le montre la figure 3. Le polynome correspondant
τ 2(r) =a2
1
42(1 + ν)2
((1 + 2ν)((1 + 2ν)r4 + (3 + 2ν)r2(R2 − r2)) + (3 + 2ν)2 (R2 − r2)2
4
)
12

prend sa valeur maximale en r = 0, donnee effectivement par (25).Le rapport
|σ11|max
τmax
=8(1 + ν)
3 + 2ν
L
R=
8(1 + ν)
3 + 2ν
1
ε
montre que la contrainte normale domine sur le cisaillement par un facteur 1/ε.La contrainte equivalente de von Mises est definie par :
σeq =
√3
2σ∼
dev : σ∼dev =
√σ2
11 + 3σ212 + 3σ2
13
ou σ∼dev represente le deviateur des contraintes. Une deformation plastique risque d’apparaıtre
des que la contrainte equivalente de von Mises atteint une valeur critique. On voit que lescontraintes normales et tangentielles contribuent toutes les deux a la contrainte de von Mises.Comme la contrainte normale est dominante a l’extremite S0, il est probable que la plasticite vacommencer en X1 = 0, X2 = ±R. Le champ de contrainte equivalente de von Mises est illustresur la figure 3 a droite sur une section droite prise au milieu de la poutre et sur la figure 2 agauche et confirme cette intuition.
3.5 Application numerique : fleche de la poutre
Dans le cas d’une poutre en acier de dimensions L = 100 mm et R = 10 mm encastree en S0
et soumise a un effort tranchant T , realise en suspendant un poids de 100 kg a l’extremite SL,calculer la fleche de la poutre, definie comme le deplacement u2 du barycentre de la section SL.L’encastrement en S0 sera traduit ici par le fait que le barycentre de S0 ne se deplace pas etque la section S0 ne subit aucune rotation de corps rigide.
Cette situation correspond peu ou prou au probleme considere par Galilee comme le montrele fameux dessin de la figure 4, a ceci pres que Galilee a considere une poutre en bois de sectionrectangulaire.
Evaluer les contraintes tangentielles et normales maximales. Pensez-vous que la limited’elasticite soit franchie et que la poutre metallique soit irremediablement flechie par cettecharge ?
La fleche δ est calculee en X1 = L,X2 = X3 = 0 grace a l’expression (23) du deplacementu2 :
δ =a1
E
L3
3=
4T
3πREε3
Pour l’acier, le module de Young vaut typiquement 200000 MPa et le coefficient de Poissonν = 0.3. On calcule alors une fleche de -0.2 mm lorsque l’on accroche un poids de 100 kg al’extremite de la poutre encastree. La contrainte normale maximale atteinte est de 125 MPatandis que le cisaillement maximal vaut 4.3 MPa. Un acier de bonne qualite peut tout a faitse comporter de maniere elastique sous un tel chargement. La limite d’elasticite d’un acierpeut aller de 100 MPa a plus de 3 GPa pour les aciers dits a haute resistance. Cela dependde sa composition metallurgique et des traitements thermomecaniques subis par l’acier lors deson elaboration. On verifie egalement que les conditions du contexte infinitesimal sont bienremplies : T/(ER2) ∼ 10−5 ε2 = 0.01. L’elancement de la poutre ε = 0.1 est toutefois unpeu eleve.
13

Fig. 4 – Dessin paru dans les Discorsi e Dimonstrazioni matematiche intorno a due nuouescienze attenanti alla mecanica ed i movimenti locali de Galilee (1638).
3.6 Remarque dans le cas d’une section annulaire
Si la poutre est un tube, le probeme de Neumann est a completer par des conditions surla frontiere interieure de la couronne. Remarquer que la fonction de gauchissement (21) neconvient plus, en raison de la presence du terme faisant intervenir le rayon exterieur R qui nepermet par de satisfaire la condition interieure. On trouvera dans le livre de (Muskhelishvili,1977) les modifications a apporter a la fonction de gauchissement pour resoudre le problemedu tube soumis a un effort tranchant.
4 Le probleme de Saint–Venant (question subsidiaire)
Arrives au terme de la resolution du probleme de la flexion simple, et forts de la connaissancedes solutions des problemes de traction/compression simple, flexion pure et torsion d’une poutreacquises en exercice, justifier que nous sommes en mesure de fournir une solution exhaustiveau probleme dit de Saint-Venant consistant a imposer un torseur quelconque donne sur l’unedes extremites de la poutre.
Saint–Venant publia pour la premiere fois la solution generale de ce probleme en 1856 dans unmemoire presente a l’Academie des Sciences. Ce n’est toutefois que recemment que le principede Saint–Venant, invoque dans la resolution du probleme du meme nom, a ete converti en
14

theoreme, pour une poutre suffisamment elancee, par (Toupin, 1965; Ladeveze, 1983).Pour un expose explicite de cette solution generale, on consultera avantageusement les
references (Ballard and Millard, 2011), ainsi que les classiques (Mandel, 1994; Love, 1944;Muskhelishvili, 1977).
La solution general du probleme de Saint-Venant resulte de la superposition de la solution de 6problemes independant : une resultante normale imposee (traction/compression d’une barre), 2efforts tranchants dans les directions 2 et 3, un moment de torsion par rapport a l’axe 1 et deuxmoments de flexion par rapport aux axes 2 et 3. Les problemes de traction, torsion et flexionnormale ont deja ete traites dans les chapitres precedents. Le cas de l’effort tranchant a faitl’objet de ce chapitre. La solution du probleme d Saint-Venant est donc desormais exhaustive.
References
Ballard P. and Millard A. (2011). Modelisation et calcul des structure elancees. Editions del’Ecole Polytechnique, Palaiseau.
Ladeveze P. (1983). Sur le principe de Saint–Venant en elasticite. Journal de MecaniqueTheorique et Appliquee, vol. 1, pp 161–184.
Love A.E.H. (1927–1944). A treatise on the mathematical theory of elasticity. Dover, New York.
Mandel J. (1966–1994). Cours de mecanique des milieux continus. Editions Jacques Gabay,Paris.
Muskhelishvili N.I. (fourth edition, 1977). Some basic problems of the mathematical theory ofelasticity. Noordhoff International Publishing, Leyden.
Toupin R. (1965). Saint–Venant’s principle. Archives of Rational Mechanics and Analysis, vol.18, pp 83–96.
15






![Séries de Fourier - Université Paris-Saclay · 2. Coefficients de Fourier de fonctions f 2L1([2ˇ;ˇ]) ou f 2L ([ˇ;ˇ]) 3 pour tout a quelconque dans R. De plus l’inégalité](https://static.fdocument.org/doc/165x107/5ec6b01b0197281b667ccad1/sries-de-fourier-universit-paris-saclay-2-coeficients-de-fourier-de-fonctions.jpg)