Poster 3118 Background Noise Suppression for Increased ... · Effects of Applying a 3.0 versus a...
1
-7 -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 63360 63480 63600 63720 63840 63960 64080 Residual (meters) Second of Day Noise Suppression Example Δt Δr Δs RW max RW min Δt Length to time bin / step Δs Size of range residual bin / step Δr Range window used to sample background noise Rw min Minimum of range residual window (range residual less than value are rejected) Rw max Maximum of range residual (range residuals greater than value are rejected E bn Expected number of background noise returns (given noise rate + 1σ) ABSTRACT: During the collocation of the Next Generation Satellite Laser System (NGSLR) with current NASA Standard System, MOBLAS-7, it was found that a centroid estimation of the return distribution using a 3 sigma RMS filter provided for a more accurate estimate of the target range than using peak estimates of the return distribution (~1.8 sigma RMS filter). One observed consequence of utilizing the 3 sigma RMS filter was the loss of valid passes with weaker signal due to the inclusion of background noise within and outside the signal distribution. A background noise suppression technique was developed and used prior to the centroid estimation such that these weaker signal passes were again viable and produced valid normal points. This paper will discuss the algorithm that was developed and present the effect of the algorithm on the quantity of valid normal points and the range determination of the normal points. Background Noise Suppression for Increased Data Acceptance Christopher B. Clarke 1 , John J. Degnan 2 , Jan F. McGarry 3 , Julie E. Horvath 1 1 Honeywell Technology Solutions Inc., Lanham, MD 20706 USA 2 Sigma Space Corporation, Lanham, MD 20706, USA 3 NASA Space Flight Center, Greenbelt, MD 20771, USA Results of Noise Suppression Noise Suppression Technique 0 500 1000 1500 2000 2500 3000 3500 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80 90 Returns/cm Range Residual (cm) Lageos-2 y13 d160 1:11 (1.8 sigma multiplier filter) Accepted Rejected 0 500 1000 1500 2000 2500 3000 3500 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80 90 Returns/cm Range Residual (cm) Lageos-2 y13 d160 1:11 (3.0 sigma multiplier filter) Accepted Rejected 0 20 40 60 80 100 120 140 160 180 200 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80 90 Returns/cm Range Residual (cm) Glonass-124 y13 d179 13:52 (1.8 sigma multiplier filter) Accepted Rejected 0 20 40 60 80 100 120 140 160 180 200 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80 90 Returns/cm Range Residual (cm) Glonass-124 y13 d179 13:52 (3.0 sigma multiplier filter) Accepted Rejected -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 63250 63400 63550 63700 63850 64000 64150 64300 64450 64600 Residual (meters) Second of Day Lageos-2 y13 d180 17:19 Raw Residuals -1.25 -1 -0.75 -0.5 -0.25 0 0.25 0.5 0.75 63250 63400 63550 63700 63850 64000 64150 64300 64450 64600 Residual (meters) Second of Day Lageos-2 y13 d180 17:19 Raw Residuals after Noise Suppression (mean + 1 sigma) -1.25 -1 -0.75 -0.5 -0.25 0 0.25 0.5 0.75 63250 63400 63550 63700 63850 64000 64150 64300 64450 64600 Residual (meters) Second of Day Lageos-2 y13 d180 17:19 Raw Residuals Edited (mean + 1 sigma noise suppression) -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 63250 63400 63550 63700 63850 64000 64150 64300 64450 64600 Residual (meters) Seconds into pass Lageos-2 y13 d180 17:19 Range Residuals after Smoothing and Filtering Accepted Rejected -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 63250 63400 63550 63700 63850 64000 64150 64300 64450 64600 Residual (meters) Seconds into pass Lageos-2 y13 d180 17:19 Range Residuals after Noise Suppresion, Smoothing, and Filtering Accepted Rejected -3 -2.8 -2.6 -2.4 -2.2 -2 -1.8 -1.6 -1.4 -1.2 -1 49950 50150 50350 50550 50750 50950 51150 51350 Residual (meters) Second of Day Glonass-124 y13 d179 13:52 Raw Residuals -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 49950 50150 50350 50550 50750 50950 51150 51350 Residual (meters) Seconds into pass Glonass-124 y13 d179 13:52 Range Residuals after Noise Suppresion, Smoothing, and Filtering Accepted Rejected -3 -2.75 -2.5 -2.25 -2 -1.75 -1.5 -1.25 -1 49950 50100 50250 50400 50550 50700 50850 51000 51150 51300 Residual (meters) Second of Day Glonass-124 y13 d180 13:52 Raw Residuals after Noise Suppression (mean + 1 sigma) -3 -2.75 -2.5 -2.25 -2 -1.75 -1.5 -1.25 -1 49950 50150 50350 50550 50750 50950 51150 51350 Residual (meters) Second of Day Glonass-124 y13 d179 13:52 Raw Residuals Edited (mean + 1 sigma noise suppression) Introduction Lageos-2 Range Residual Histogram using 1.8 and 3.0 Sigma Multiplier Filters Glonass-124 Range Residual Histogram using 1.8 and 3.0 Sigma Multiplier Filters Lageos-2 Range Residual Histogram Effects of Applying a 3.0 versus a 1.8 Sigma Filter to the Collocation Data Set Effects of Noise Suppression on a Lageos-2 pass Effects of Noise Suppression on a Glonass-124 pass Effects of Applying Noise Suppression to the Collocation Data Set Effects of Noise Suppression on the Collocation Data Set Summary -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 49950 50150 50350 50550 50750 50950 51150 51350 Residual (meters) Seconds into pass Glonass-124 y13 d179 13:52 Range Residuals after Smoothing and Filtering Accepted Rejected Poster 3118 0 10 20 30 40 50 60 70 80 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80 90 Returns/cm Range Residual (cm) Lageos-2 y13 d165 17:34 (3.0 sigma multiplier filter) Accepted Rejected Noise included in signal A noise suppression technique was developed so that weaker passes would not have to be eliminated from the data set. The technique consisted of determining the background noise rate by sampling the noise outside the signal window and then randomly editing observations at the noise rate + 1σ. This “noise rate + 1σ” editing was chosen because it appeared to do the best job of eliminating noise while not significantly eliminating signal. Noise Suppression Algorithm Passes were rejected when they had a larger than expected RMS due to the inclusion of background noise. 18% of Lageos and 34% of GNSS normal points were lost due to the inclusion of background noise when using centroid calculation. Uniformly distributed background noise is included in the centroid calculation of skewed target return. The green box is an estimate of noise included in signal centroid calculation. “True” target return is on “top” of background noise. The technique worked well when the signal was strong relative to the background noise. The 3.0 sigma filter did not reliably differentiate signal from the background noise in some weaker passes. During the collocation of NASA’s Next Generation Satellite Laser Ranging (NGSLR) system with current NASA Standard, MOBLAS-7, at NASA Goddard Space Flight Center, it was found that centroid estimation of the return distribution provide a more accurate estimate of the target range estimate than a peak estimate [Clarke et al. 2013]. Peak estimate is determined by using an iterative 1.8 sigma multiplier filter. Cenroid estimate is determined by using an iterative 3.0 sigma multiplier filter. Example of Noise Suppression Parameters on a Range Residual Plot Processing the collocation data set while applying noise suppression increased the number of Lageos and GNSS normal points significantly. There was ~ 200% increase in GNSS passes and normal points. The plots below display the results of noise suppression on two weaker signal passes. The top three plots in each set display the raw residuals before noise suppression, the raw residuals after noise suppression, and the returns that were edited during noise suppression. The noise suppression eliminates most of the background noise and very little of the signal. The bottom two plots in each set display the processed data (smoothed and sigma multiplier filtered) with and without noise suppression. The data with noise suppression accepts almost entirely signal, while the data without noise suppression includes large amounts of noise. Most of the newly included passes were tracked during the daytime or under poor seeing conditions. Only six of the new normal points had overlapping MOBLAS-7 normal points with enough full rate observations to be used in collocation. The mean range difference between NGSLR and MOBLAS-7 decreased ~2.5 mm when the data was processed with noise suppression due to the distribution of the edited background noise in the signal. The mean range difference is in good agreement with Lageos theoretical predictions given the different types of receive systems used by NGSLR and MOBLAS-7 [Degnan, 1994; Fan et al, 2001]. The algorithm processes data in time bins of Δt size starting a the beginning of the pass. For each time bin the following steps are performed: – Reject all data outside of a range residual window from RW min to RW max (signal is centered in window) – Estimate background noise rate using counts in a smaller range window outside the signal (counts in the Δr by Δt box). – Perform noise suppression to residual steps of Δs, starting at RW min and ending at RW max . For each step the noise suppression is performed using the following decisions: • If the number returns in the step (counts in the Δs by Δt box) is less than the expected noise returns, E bn , then all the returns are rejected. • If the number returns are greater than E bn , then E bn of the total returns in the step are rejected. The rejected returns are chosen using a random number generator. Honeywell 7515 Mission Drive Lanham MD 20706 19 th International Workshop on Laser Ranging Annapolis, MD October 27-31, 2014 No Noise Suppression With Noise Suppression % Increase Lageos Passes 35 52 48.6 Lageos Normal Points 455 594 30.5 GNSS Passes 16 50 212.5 GNSS Normal Points 62 184 196.8 1.8 Sigma Filter 3.0 Sigma Filter % Decrease Lageos Passes 51 35 31.4 Lageos Normal Points 554 455 17.9 GNSS Passes 30 16 46.7 GNSS Normal Points 94 62 34.0 Noise Suppression Parameters Lageos Mean Range Difference [NGSLR - Moblas-7] (mm) Number of Normal Points Standard Deviation (mm) Standard Deviation of Mean (mm) Without noise suppression 12.81 270 4.98 0.30 With noise suppression 10.26 276 4.86 0.29
Transcript of Poster 3118 Background Noise Suppression for Increased ... · Effects of Applying a 3.0 versus a...

-7
-6
-5
-4
-3
-2
-1
0
1
2
3
4
5
6
63360 63480 63600 63720 63840 63960 64080
Res
idua
l (m
eter
s)
Second of Day
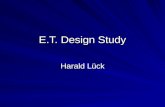
Noise Suppression Example
ΔtΔrΔs
RWmax
RWmin
Δt Length to time bin / stepΔs Size of range residual bin / stepΔr Range window used to sample background noiseRwmin Minimum of range residual window
(range residual less than value are rejected)Rwmax Maximum of range residual
(range residuals greater than value are rejectedEbn Expected number of background noise returns
(given noise rate + 1σ)
ABSTRACT: During the collocation of the Next Generation Satellite Laser System (NGSLR) with current NASA Standard System, MOBLAS-7, it was found that a centroid estimation of the return distribution using a 3 sigma RMS filter provided for a more accurate estimate of the target range than using peak estimates of the return distribution (~1.8 sigma RMS filter). One observed consequence of utilizing the 3 sigma RMS filter was the loss of valid passes with weaker signal due to the inclusion of background noise within and outside the signal distribution. A background noise suppression technique was developed and used prior to the centroid estimation such that these weaker signal passes were again viable and produced valid normal points. This paper will discuss the algorithm that was developed and present the effect of the algorithm on the quantity of valid normal points and the range determination of the normal points.
Background Noise Suppression for Increased Data Acceptance
Christopher B. Clarke1, John J. Degnan2 , Jan F. McGarry3, Julie E. Horvath1
1Honeywell Technology Solutions Inc., Lanham, MD 20706 USA
2Sigma Space Corporation, Lanham, MD 20706, USA 3NASA Space Flight Center, Greenbelt, MD 20771, USA
Results of Noise Suppression
Noise Suppression Technique
0
500
1000
1500
2000
2500
3000
3500
-60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80 90
Ret
urns
/cm
Range Residual (cm)
Lageos-2 y13 d160 1:11(1.8 sigma multiplier filter)
AcceptedRejected
0
500
1000
1500
2000
2500
3000
3500
-60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80 90
Ret
urns
/cm
Range Residual (cm)
Lageos-2 y13 d160 1:11(3.0 sigma multiplier filter)
AcceptedRejected
0
20
40
60
80
100
120
140
160
180
200
-60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80 90
Ret
urns
/cm
Range Residual (cm)
Glonass-124 y13 d179 13:52(1.8 sigma multiplier filter)
AcceptedRejected
0
20
40
60
80
100
120
140
160
180
200
-60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80 90
Ret
urns
/cm
Range Residual (cm)
Glonass-124 y13 d179 13:52(3.0 sigma multiplier filter)
AcceptedRejected
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
63250 63400 63550 63700 63850 64000 64150 64300 64450 64600
Res
idua
l (m
eter
s)
Second of Day
Lageos-2 y13 d180 17:19Raw Residuals
-1.25
-1
-0.75
-0.5
-0.25
0
0.25
0.5
0.75
63250 63400 63550 63700 63850 64000 64150 64300 64450 64600
Res
idua
l (m
eter
s)
Second of Day
Lageos-2 y13 d180 17:19Raw Residuals after Noise Suppression (mean + 1 sigma)
-1.25
-1
-0.75
-0.5
-0.25
0
0.25
0.5
0.75
63250 63400 63550 63700 63850 64000 64150 64300 64450 64600
Res
idua
l (m
eter
s)
Second of Day
Lageos-2 y13 d180 17:19Raw Residuals Edited (mean + 1 sigma noise suppression)
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
63250 63400 63550 63700 63850 64000 64150 64300 64450 64600
Res
idua
l (m
eter
s)
Seconds into pass
Lageos-2 y13 d180 17:19Range Residuals after Smoothing and Filtering
AcceptedRejected
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
63250 63400 63550 63700 63850 64000 64150 64300 64450 64600
Res
idua
l (m
eter
s)
Seconds into pass
Lageos-2 y13 d180 17:19Range Residuals after Noise Suppresion, Smoothing, and Filtering
AcceptedRejected
-3
-2.8
-2.6
-2.4
-2.2
-2
-1.8
-1.6
-1.4
-1.2
-1
49950 50150 50350 50550 50750 50950 51150 51350
Res
idua
l (m
eter
s)
Second of Day
Glonass-124 y13 d179 13:52Raw Residuals
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
49950 50150 50350 50550 50750 50950 51150 51350
Res
idua
l (m
eter
s)
Seconds into pass
Glonass-124 y13 d179 13:52Range Residuals after Noise Suppresion, Smoothing, and Filtering
AcceptedRejected
-3
-2.75
-2.5
-2.25
-2
-1.75
-1.5
-1.25
-1
49950 50100 50250 50400 50550 50700 50850 51000 51150 51300
Res
idua
l (m
eter
s)
Second of Day
Glonass-124 y13 d180 13:52Raw Residuals after Noise Suppression (mean + 1 sigma)
-3
-2.75
-2.5
-2.25
-2
-1.75
-1.5
-1.25
-1
49950 50150 50350 50550 50750 50950 51150 51350
Res
idua
l (m
eter
s)
Second of Day
Glonass-124 y13 d179 13:52Raw Residuals Edited (mean + 1 sigma noise suppression)
Introduction
Lageos-2 Range Residual Histogram using 1.8 and 3.0 Sigma Multiplier Filters
Glonass-124 Range Residual Histogram using 1.8 and 3.0 Sigma Multiplier Filters
Lageos-2 Range Residual Histogram
Effects of Applying a 3.0 versus a 1.8 Sigma Filter to the Collocation Data Set
Effects of Noise Suppression on a Lageos-2 pass
Effects of Noise Suppression on a Glonass-124 pass
Effects of Applying Noise Suppression to the Collocation Data Set
Effects of Noise Suppression on the Collocation Data Set Summary
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
49950 50150 50350 50550 50750 50950 51150 51350
Res
idua
l (m
eter
s)
Seconds into pass
Glonass-124 y13 d179 13:52Range Residuals after Smoothing and Filtering
AcceptedRejected
Poster 3118
0
10
20
30
40
50
60
70
80
-60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80 90
Ret
urns
/cm
Range Residual (cm)
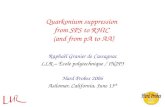
Lageos-2 y13 d165 17:34(3.0 sigma multiplier filter)
AcceptedRejectedNoise included in signal
A noise suppression technique was developed so that weaker passes would not have to be eliminated from the data set.
The technique consisted of determining the background noise rate by sampling the noise outside the signal window and then randomly editing observations at the noise rate + 1σ.
This “noise rate + 1σ” editing was chosen because it appeared to do the best job of eliminating noise while not significantly eliminating signal.
Noise Suppression Algorithm
Passes were rejected when they had a larger than expected RMS due to the inclusion of background noise.
18% of Lageos and 34% of GNSS normal points were lost due to the inclusion of background noise when using centroid calculation.
Uniformly distributed background noise is included in the centroid calculation of skewed target return.
The green box is an estimate of noise included in signal centroid calculation.
“True” target return is on “top” of background noise.
The technique worked well when the signal was strong relative to the background noise.
The 3.0 sigma filter did not reliably differentiate signal from the background noise in some weaker passes.
During the collocation of NASA’s Next Generation Satellite Laser Ranging (NGSLR) system with current NASA Standard, MOBLAS-7, at NASA Goddard Space Flight Center, it was found that centroid estimation of the return distribution provide a more accurate estimate of the target range estimate than a peak estimate [Clarke et al. 2013].
Peak estimate is determined by using an iterative 1.8 sigma multiplier filter.
Cenroid estimate is determined by using an iterative 3.0 sigma multiplier filter.
Example of Noise Suppression Parameters on a Range Residual Plot
Processing the collocation data set while applying noise suppression increased the number of Lageos and GNSS normal points significantly. There was ~ 200% increase in GNSS passes and normal points.
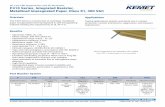
The plots below display the results of noise suppression on two weaker signal passes.
The top three plots in each set display the raw residuals before noise suppression, the raw residuals after noise suppression, and the returns that were edited during noise suppression. The noise suppression eliminates most of the background noise and very little of the signal.
The bottom two plots in each set display the processed data (smoothed and sigma multiplier filtered) with and without noise suppression. The data with noise suppression accepts almost entirely signal, while the data without noise suppression includes large amounts of noise.
Most of the newly included passes were tracked during the daytime or under poor seeing conditions. Only six of the new normal points had overlapping MOBLAS-7 normal points with enough full rate observations to be used in collocation.
The mean range difference between NGSLR and MOBLAS-7 decreased ~2.5 mm when the data was processed with noise suppression due to the distribution of the edited background noise in the signal.
The mean range difference is in good agreement with Lageos theoretical predictions given the different types of receive systems used by NGSLR and MOBLAS-7 [Degnan, 1994; Fan et al, 2001].
The algorithm processes data in time bins of Δt size starting a the beginning of the pass.
For each time bin the following steps are performed:
– Reject all data outside of a range residual window from RWmin to RWmax (signal is centered in window)
– Estimate background noise rate using counts in a smaller range window outside the signal (counts in the Δr by Δt box).
– Perform noise suppression to residual steps of Δs, starting at RWmin and ending at RWmax. For each step the noise suppression is performed using the following decisions:
• If the number returns in the step (counts in the Δs by Δt box) is less than the expected noise returns, Ebn, then all the returns are rejected.
• If the number returns are greater than Ebn, then Ebn of the total returns in the step are rejected. The rejected returns are chosen using a random number generator.
Honeywell7515 Mission DriveLanham MD 20706
19th International Workshop on Laser Ranging Annapolis, MDOctober 27-31, 2014
No Noise Suppression
With Noise Suppression
% Increase
Lageos Passes 35 52 48.6Lageos Normal Points 455 594 30.5
GNSS Passes 16 50 212.5GNSS Normal Points 62 184 196.8
1.8 Sigma Filter 3.0 Sigma Filter % DecreaseLageos Passes 51 35 31.4
Lageos Normal Points 554 455 17.9GNSS Passes 30 16 46.7
GNSS Normal Points 94 62 34.0
Noise Suppression Parameters
Lageos Mean Range Difference [NGSLR - Moblas-7] (mm)
Number of Normal Points
Standard Deviation (mm)
Standard Deviation of Mean (mm)
Without noise suppression 12.81 270 4.98 0.30With noise suppression 10.26 276 4.86 0.29