Positive Curvature and Hamiltonian Monte Carlo · Positive Curvature and Hamiltonian Monte Carlo...
1
Positive Curvature and Hamiltonian Monte Carlo Christof Seiler, Simon Rubinstein-Salzedo, and Susan Holmes Department of Statistics, Stanford University Goal Running time estimates for sampling from high di- mensional probability distributions using Hamilto- nian Monte Carlo (HMC). Hamiltonian Monte Carlo Bayesian posterior distribution: π (q | data) = 1 Z L(data | q ) π (q ) parameter q ∈ R d , d observations, and unknown normalizing constant Z . Expectation of f : R d → R I := E π (f )= Z f (q ) π (q | data) dq Empirical mean: b I := 1 T T X t=1 Q t , Q 1 ,...,Q T ∼ π (q | data) simulated using HMC for running time T HMC algorithm: Metropolis-Hastings with proposal step following Hamiltonian trajectories Error and running time: Bound the error | b I - I | as a function of the running time T Sectional Curvature Sectional curvature Sec describes the nature of geodesics x δ ✓ 1 - " 2 2 Sec x (u , v )+ O (" 3 + " 2 δ ) ◆ Sec x (u , v ) > 0 Positive curvature: geodesics meet Flat and negative curvature: geodesics deviate Probability Meets Geometry Coarse Ricci curvature κ describes the deviation from independence of subsequent draws from Markov chain Monte Carlo • The larger κ the more independent • The larger κ the smaller T for the same error • We calculate the κ of HMC Concentration inequality (JO10) P | b I - I |≥ r f Lip ≤ 2e -r 2 /(16V 2 (κ,T )) Jacobi Metric Jacobi metric g h links Hamiltonians to Riemannian geometry Hamiltonian function: h = V (q )+ K (p) Potential energy: V (q )= - log π (q | data) + C Kinetic energy: K (p)= 1 2 p, p Hamiltonian equations: dq dt = ∂H ∂p and dp dt = - ∂H ∂q Jacobi-Maupertuis Principle: q (t ) T q X p (0) q (0) Hamiltonian trajectories q (t) with fixed h are geodesics on Riemannian manifolds X with the Jacobi metric: g h (p, p)=2(h - V ) p, p. HMC Meets Geometry Reference metric ·, · Conformal scaling of a metric 2(h - V ) Equivalence table: HMC Riemannian geometry posterior distribution scaling of reference metric covariance of proposal reference metric pick from proposal geodesics Gaussian Example • HMC sampling from a Gaussian in R d with zero mean and covariance matrix Λ -1 • Calculate sectional curvature of Jacobi metric • Sec is random because p is random • Calculate coarse Ricci curvature from Sec Our Lemma on positive curvature of HMC: P(d 2 Sec ≥ K 1 ) ≥ 1 - K 2 e -K 3 √ d Our Corollary in high dimensions: Sec ≥ Tr(Λ) d 3 as d →∞ Our Proposal on coarse Ricci curvature of HMC: κ ≥ Tr(Λ) 6d 2 + O 1 d 2 as d →∞ Numerical simulations: Sample Sec’s uniformly at each step, q (0),...,q (T - 1) Histogram of sectional curvatures (d = 100) Frequency 0.00005 0.00015 0.00025 0.00035 0 20000 40000 60000 expectation E(Sec) sample mean expectation E(Sec) sample mean (d = 10) (d = 1000) 0 0 -3 3 10 -6 Computational Anatomy Conclusion Linking HMC to geodesics of the Jacobi metric en- ables us to analyze HMC through the rich mathe- matical framework of Riemannian geometry. References (JO10) A. Joulin and Y. Ollivier. Curvature, Concentration and Error Estimates for Markov Chain Monte Carlo. Ann. Probab., 2010. (Pin75) O. C. Pin. Curvature and Mechanics. Advances in Math., 1975. Acknowledgments CS is supported by a postdoctoral fellowship from the Swiss Na- tional Science Foundation and a travel grant from the France- Stanford Center. SRS and SH are supported by NIH grant R01- GM086884.
Transcript of Positive Curvature and Hamiltonian Monte Carlo · Positive Curvature and Hamiltonian Monte Carlo...

Positive Curvature and Hamiltonian Monte CarloChristof Seiler, Simon Rubinstein-Salzedo, and Susan Holmes
Department of Statistics, Stanford University
GoalRunning time estimates for sampling from high di-mensional probability distributions using Hamilto-nian Monte Carlo (HMC).
Hamiltonian Monte Carlo
Bayesian posterior distribution:π(q | data) = 1
Z L(data | q) π(q)parameter q ∈ Rd, d� observations, andunknown normalizing constant Z.
Expectation of f : Rd→ R
I := Eπ(f ) =∫f (q) π(q | data) dq
Empirical mean:̂I := 1
T
T∑
t=1Qt, Q1, . . . , QT ∼ π(q | data)
simulated using HMC for running time THMC algorithm: Metropolis-Hastings with proposal
step following Hamiltonian trajectoriesError and running time: Bound the error | ̂I − I| as
a function of the running time T
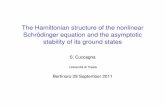
Sectional Curvature
Sectional curvature Sec describes the nature ofgeodesics
x
�
✓1 � "2
2Secx(u, v) + O("3 + "2�)
◆
Secx(u, v) > 0
Positive curvature: geodesics meetFlat and negative curvature: geodesics deviate
Probability Meets Geometry
Coarse Ricci curvature κ describes the deviationfrom independence of subsequent draws fromMarkov chain Monte Carlo•The larger κ the more independent•The larger κ the smaller T for the same error•We calculate the κ of HMC
Concentration inequality (JO10)P(| ̂I − I| ≥ r‖f‖Lip
)≤ 2e−r2/(16V 2(κ,T ))
Jacobi Metric
Jacobi metric gh links Hamiltonians to Riemanniangeometry
Hamiltonian function:h = V (q) + K(p)
Potential energy:V (q) = − log π(q | data) + C
Kinetic energy:K(p) = 1
2 〈p, p〉Hamiltonian equations:
dq
dt= ∂H
∂pand dp
dt= −∂H
∂q
Jacobi-Maupertuis Principle:
q(t)
TqX
p(0) q(0)
Hamiltonian trajectories q(t) with fixed h aregeodesics on Riemannian manifolds X with theJacobi metric:
gh(p, p) = 2 (h− V ) 〈p, p〉.
HMC Meets Geometry
Reference metric 〈·, ·〉Conformal scaling of a metric 2 (h− V )Equivalence table:
HMC Riemannian geometryposterior distribution scaling of reference metriccovariance of proposal reference metricpick from proposal geodesics
Gaussian Example
•HMC sampling from a Gaussian in Rd with zeromean and covariance matrix Λ−1
•Calculate sectional curvature of Jacobi metric• Sec is random because p is random•Calculate coarse Ricci curvature from SecOur Lemma on positive curvature of HMC:
P(d2 Sec ≥ K1) ≥ 1−K2e−K3√d
Our Corollary in high dimensions:
Sec ≥ Tr(Λ)d3 as d→∞
Our Proposal on coarse Ricci curvature of HMC:
κ ≥ Tr(Λ)6d2 + O
1d2
as d→∞
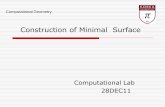
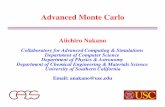
Numerical simulations: Sample Sec’s uniformly ateach step, q(0), . . . , q(T − 1)
Histogram of sectional curvatures (d = 100)
Freq
uenc
y
0.00005 0.00015 0.00025 0.00035
020
000
4000
060
000
expectation E(Sec)sample mean
Histogram of sectional curvatures (d = 10)
Freq
uenc
y
−3 −2 −1 0 1 2 3 4
020
000
4000
060
000
8000
0
expectation E(Sec)sample mean
���������
��������� ������ �� ���������� �� � �����
���� ������ ������ ������
������
������
������ ����������� ������
������ ����
(d = 10)
(d = 1000)
0
0-3 3
10-6
Computational Anatomy
ConclusionLinking HMC to geodesics of the Jacobi metric en-ables us to analyze HMC through the rich mathe-matical framework of Riemannian geometry.
References
(JO10) A. Joulin and Y. Ollivier. Curvature, Concentrationand Error Estimates for Markov Chain Monte Carlo. Ann.Probab., 2010.
(Pin75) O. C. Pin. Curvature and Mechanics. Advances inMath., 1975.
Acknowledgments
CS is supported by a postdoctoral fellowship from the Swiss Na-tional Science Foundation and a travel grant from the France-Stanford Center. SRS and SH are supported by NIH grant R01-GM086884.