Politex: Regret Bounds for Policy Iteration Using Expert Prediction · 2019-06-05 · Politex +...
1
P: Regret Bounds for Policy Iteration Using Expert Prediction Yasin Abbasi-Yadkori, Peter L. Bartle, Kush Bhatia, Nevena Lazić, Csaba Szepesvári, Gellért Weisz Summary I Seing: average-cost RL with discrete actions and value function approximation I P: soened and averaged policy iteration. I If the value function error aer τ steps satisfies k Q π - b Q π k ν ≤ ε ( τ ) = ε 0 + O( p 1/ τ ) where ε 0 is the approximation error, and ν is the stationary state-action distribution, then the regret of P in uniformly mixing MDPs is of the order R T = e O(T 3/4 + ε 0 T ) . I Regret bound does not scale in the size of the MDP, does not depend on the "concentrability coeicient", easy to implement (no confidence bounds required). P algorithm Input: phase length τ > 0, initial state x 0 Set b Q 0 (x , a) = 0 ∀x , a for i := 1, 2,..., do Policy iteration: π i (·| x ) = argmin u∈Δ hu, b Q i-1 (x , ·)i P : π i (·| x ) = argmin u∈Δ hu, i-1 j =0 b Q j (x , ·)i - η -1 H(u) ∝ exp - η i-1 j =0 b Q j (x , ·) Execute π i for τ time steps and collect dataset Z i Estimate b Q i from Z 1 ,..., Z i , π 1 ,..., π i end for Dierent value estimation methods are possible. For non-linear Q-functions, one can maintain only the most recent n estimates. P analysis Assumptions: I A1 (Unichain). MDP states form a single recurrent class. I A2 (Uniform mixing). sup π k( ν π - ν ) > H π k 1 ≤ exp(- κ -1 )kν π - ν k 1 , where H π is the transition probability matrix for (s, a) pairs under π , and ν π is the stationary state-action distribution. Let λ π = lim T →∞ 1 T ˝ T t =1 c (x t , π (x t )) be the average cost of a policy. Regret decomposes as R T = T t =1 c (x t , a t )- c (x * t , a * t ) = V T + R T + W T V T = T t =1 c t - λ π (t ) R T = T t =1 λ π (t ) - λ π * W T = T t =1 λ π * - c * t I V T and W T are the dierences between the instantaneous and average costs, respectively scale as κ T 3/4 and κ √ T w.h.p. I R T is the pseudo-regret, bounded using the regret bound of the Exponentially Weighted Average (EWA) forecaster and the value error bound. Least squares policy estimation (LSPE) Bounding R T requires b Q i (x , a)∈[b, b + Q max ] and bounded error k Q π i - b Q i k ν * , k Q π i - b Q i k μ * ⊗π i ≤ ε ( τ ) = ε 0 + O( p 1/ τ ) . LSPE: I Linear value function approximation b Q π = Ψw π I Obtains a simulation-based solution to the projected Bellman equation Ψw = Π π (c - λ1 + H Ψw ) Under the additional assumptions below, w.h.p. LSPE satisfies the error bound, and Q max is bounded. I A3 (Features). Columns of [Ψ 1] are linearly independent, and features are bounded. I A4 (Feature excitation). For any π , λ min (Ψ > diag( ν π )Ψ)≥ σ > 0. Experiments P + LSPE on eueing problems Figure: Average cost at the end of each phase for the 4-queue and 8-queue environments (mean and std of 50 runs), for dierent η . P + neural networks on Atari Figure: Ms Pacman game scores obtained by the agents at the end of each game, using runs with dierent random seeds. Related work Y. Abbasi-Yadkori, N. Lazić, and C. Szepesvári. "Regret bounds for model-free LQ control." AISTATS (2019). E. Even-Dar, S. M. Kakade, and Y. Mansour. "Online MDPs." Mathematics of Operations Research 34.3 (2009). H. Yu and D. P. Bertsekas. "Convergence results for some temporal dierence methods based on least squares." IEEE Transactions on Automatic Control 54.7 (2009).
Transcript of Politex: Regret Bounds for Policy Iteration Using Expert Prediction · 2019-06-05 · Politex +...

Politex: Regret Bounds for Policy Iteration Using Expert PredictionYasin Abbasi-Yadkori, Peter L. Bartle�, Kush Bhatia, Nevena Lazić, Csaba Szepesvári, Gellért Weisz
Summary
I Se�ing: average-cost RL with discrete actions and
value function approximation
I Politex: so�ened and averaged policy iteration.
I If the value function error a�er τ steps satisfies
‖Qπ − Qπ ‖ν ≤ ε(τ ) = ε0 + O(√1/τ )
where ε0 is the approximation error, and ν is the
stationary state-action distribution, then the regret of
Politex in uniformly mixing MDPs is of the order
RT = O(T 3/4 + ε0T ) .
I Regret bound does not scale in the size of the MDP,
does not depend on the "concentrability coe�icient",
easy to implement (no confidence bounds required).
Politex algorithm
Input: phase length τ > 0, initial state x0Set Q0(x, a) = 0 ∀x, afor i := 1, 2, . . . , doPolicy iteration: πi(·|x) = argmin
u∈∆〈u, Qi−1(x, ·)〉
Politex : πi(·|x) = argminu∈∆
〈u,i−1∑j=0
Qj(x, ·)〉 − η−1H(u)
∝ exp(− η
i−1∑j=0
Qj(x, ·))
Execute πi for τ time steps and collect datasetZiEstimate Qi fromZ1, . . . ,Zi,π1, . . . ,πi
end for
Di�erent value estimation methods are possible. For
non-linear Q-functions, one can maintain only the most
recent n estimates.
Politex analysis
Assumptions:
I A1 (Unichain). MDP states form a single recurrent class.
I A2 (Uniform mixing). supπ ‖(νπ − ν )>Hπ ‖1 ≤ exp(−κ−1)‖νπ − ν ‖1,where Hπ is the transition probability matrix for (s, a) pairs under
π , and νπ is the stationary state-action distribution.
Let λπ = limT→∞1T∑T
t=1 c(xt,π (xt)) be the average cost of a policy.
Regret decomposes as
RT =
T∑t=1
c(xt, at) − c(x∗t , a∗t ) = VT + RT +WT
VT =
T∑t=1
ct − λπ(t) RT =
T∑t=1
λπ(t) − λπ ∗ WT =
T∑t=1
λπ ∗ − c∗t
I VT and WT are the di�erences between the instantaneous and
average costs, respectively scale as κT 3/4and κ
√T w.h.p.
I RT is the pseudo-regret, bounded using the regret bound of the
Exponentially Weighted Average (EWA) forecaster and the value
error bound.
Least squares policy estimation (LSPE)
Bounding RT requires Qi(x, a) ∈ [b, b + Qmax] and bounded error
‖Qπi − Qi‖ν∗, ‖Qπi − Qi‖µ∗⊗πi ≤ ε(τ ) = ε0 + O(√1/τ ) .
LSPE:
I Linear value function approximation Qπ = Ψwπ
I Obtains a simulation-based solution to the projected Bellman
equation Ψw = Ππ (c − λ1 + HΨw)
Under the additional assumptions below, w.h.p. LSPE satisfies the
error bound, and Qmax is bounded.
I A3 (Features). Columns of [Ψ 1] are linearly independent, and
features are bounded.
I A4 (Feature excitation). For any π , λmin(Ψ>diag(νπ )Ψ) ≥ σ > 0.
Experiments
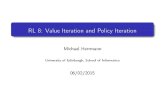
Politex + LSPE on �eueing problems
0 500 1000 1500 2000
phase
25
30
35
40
45
50
55
60
65
70
avg c
ost
4-queue
LSPI
POLITEX
RLSVI
0 500 1000 1500 2000
phase
100
150
200
250
300
3508-queue
Figure: Average cost at the end of each phase
for the 4-queue and 8-queue environments
(mean and std of 50 runs), for di�erent η.
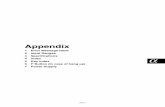
Politex + neural networks on Atari
0 0.25e8 0.50e8 0.75e8 1e8
Game frames
0
1000
2000
Rew
ard
per
epis
ode
POLITEX
DQN
Figure: Ms Pacman game scores obtained by
the agents at the end of each game, using runs
with di�erent random seeds.
Related work
Y. Abbasi-Yadkori, N. Lazić, and C. Szepesvári.
"Regret bounds for model-free LQ control."
AISTATS (2019).
E. Even-Dar, S. M. Kakade, and Y. Mansour.
"Online MDPs." Mathematics of Operations
Research 34.3 (2009).
H. Yu and D. P. Bertsekas. "Convergence
results for some temporal di�erence methods
based on least squares." IEEE Transactions on
Automatic Control 54.7 (2009).