
Planar Shape Changing Compliant Tensegrity Mechanisms with ...
1
1 Planar Shape Changing Compliant Tensegrity Mechanisms with Multi-Stable Equilibria Tyler Rhodes and Vishesh Vikas Abstract—Compliant Tensegrity Mechanisms (CoTM) combine springs, cables and rigid rods for making robust, shape-changing mechanical structures where the equilibrium equations are non- linear in the orientation (sin θ, cos θ). Moreover, the mechanism orientation may be controlled through its compliance, such as, by indirectly varying free lengths of the springs and also through the length of the compressive rigid member. Interestingly, the non- linearities allow the mechanism to exist in multiple equilibrium positions. The research presents a case of a planar CoTM that exists in two stable and three unstable equilibrium positions. Index Terms—Tensegrity, compliant, mechanisms, multiple equilibria, shape changing structures. I. PLANAR COMPLIANT TENSEGRITY MECHANISM The proposed mechanism consists of two triangular rigid bodies connected by a rigid rod and two springs members as shown in Fig. 1 where the relative distance between points 1, 4 is L 3 . The spring free lengths and spring constants are denoted by L 0i ,k i where i =1, 2. where f 3 is the unknown Fig. 1: The proposed planar Compliant Tensegrity Mechanism (CoTM) comprises of two triangular rigid bodies connected by a rigid rod (green) and two springs (red) alongside the physical model force along the rigid bar, f i = k i (d i - L 0i ) are the forces in spring elements and d i are length of the spring elements ∀i =1, 2. The four equations of interest are two equilibrium equations coupled with two constraint equations k 1 1 - L 01 d 1 (P 1→4 × P 2→6 )+ k 2 1 - L 02 d 2 (P 1→4 × P 3→5 )=0 (1) k 1 1 - L 01 d 1 (P 1→2 × P 2→6 )+ k 2 1 - L 02 d 2 (P 1→3 × P 3→5 )=0 (2) d 2 1 -k P 2→6 k 2 =0 (3) d 2 2 -k P 3→5 k 2 =0 (4) These equations are non-linear in the orientation angles γ 1 ,γ 2 which result in coupled polynomial equations in x 1 ,x 2 ,d 1 ,d 2 using tan half-angle substitutions where x i = tan (γ i /2). T. Rhodes, V. Vikas are with the Agile Robotics Lab (ARL) at University of Alabama, Tuscaloosa, AL. Email: [email protected], [email protected]. II. MULTIPLE EQUILIBRIA AND SHAPE CHANGE Numerically, the equilibrium positions of such mechanisms are calculated numerical polynomial solver e.g. homotopy continuation-based Bertini Solver. Such non-linear mecha- nisms have multiple equilibrium positions and possess ability to move from one shape to another using active control of L 0i ,k i ∀i =1, 2 and L 3 . Interestingly, it is observed that as the free-lengths are varied, the number of equilibrium shapes varies from as many as 4 to 16. This is experimentally validated by constructing a model of the proposed mechanism using laser-cut acrylic, springs, nuts and bolts. The revolute joints at points 1, 2 will be maintained by using bearings. Figure 2 illustrates five equilibrium positions where symmetry of spring elements and rigid body is preserved. (a) Stable equilibrium positions (b) Unstable equilibrium positions Fig. 2: A planar CoTM displays multiple equilibria where two of the positions are stable and the other three are unstable. III. CONCLUSION AND DEMO The CoTM mechanism can move from one stable shape to another by using active control of spring elements and rigid rod length. The demo will illustrate how shape change can be achieved through motor-cable-spring control (free-length). REFERENCES [1] Tanouye, M. and Vikas,V. Static and Stability Analysis of a Planar Com- pliant Tensegrity Mechanism. ASME International Design Engineering Technical Conference (DETC), 2018. [2] B¨ ohm, V., Sumi, S., Kaufhold, T. and Zimmermann, K. Compliant multistable tensegrity structures with simple topologies. New Trends in Mechanism and Machine Science, 2017. 153-161. [3] Bates, D., Hauenstein, D., Sommese, A., and Wampler, C. Bertini: Software for Numerical Algebraic Geometry. Available at bertini.nd.edu.
Transcript of Planar Shape Changing Compliant Tensegrity Mechanisms with ...
1
Planar Shape Changing Compliant TensegrityMechanisms with Multi-Stable Equilibria
Tyler Rhodes and Vishesh Vikas
Abstract—Compliant Tensegrity Mechanisms (CoTM) combinesprings, cables and rigid rods for making robust, shape-changingmechanical structures where the equilibrium equations are non-linear in the orientation (sin θ, cos θ). Moreover, the mechanismorientation may be controlled through its compliance, such as, byindirectly varying free lengths of the springs and also through thelength of the compressive rigid member. Interestingly, the non-linearities allow the mechanism to exist in multiple equilibriumpositions. The research presents a case of a planar CoTM thatexists in two stable and three unstable equilibrium positions.
Index Terms—Tensegrity, compliant, mechanisms, multipleequilibria, shape changing structures.
I. PLANAR COMPLIANT TENSEGRITY MECHANISM
The proposed mechanism consists of two triangular rigidbodies connected by a rigid rod and two springs members asshown in Fig. 1 where the relative distance between points1, 4 is L3. The spring free lengths and spring constants aredenoted by L0i, ki where i = 1, 2. where f3 is the unknown
Fig. 1: The proposed planar Compliant Tensegrity Mechanism(CoTM) comprises of two triangular rigid bodies connectedby a rigid rod (green) and two springs (red) alongside thephysical model
force along the rigid bar, fi = ki(di − L0i) are the forcesin spring elements and di are length of the spring elements∀i = 1, 2. The four equations of interest are two equilibriumequations coupled with two constraint equations
k1
(1− L01
d1
)(P1→4 × P2→6) + k2
(1− L02
d2
)(P1→4 × P3→5) = 0 (1)
k1
(1− L01
d1
)(P1→2 × P2→6) + k2
(1− L02
d2
)(P1→3 × P3→5) = 0 (2)
d21 − ‖P2→6‖2 = 0 (3)
d22 − ‖P3→5‖2 = 0 (4)
These equations are non-linear in the orientation angles γ1, γ2which result in coupled polynomial equations in x1, x2, d1, d2using tan half-angle substitutions where xi = tan (γi/2).
T. Rhodes, V. Vikas are with the Agile Robotics Lab (ARL) at University ofAlabama, Tuscaloosa, AL. Email: [email protected], [email protected].
II. MULTIPLE EQUILIBRIA AND SHAPE CHANGE
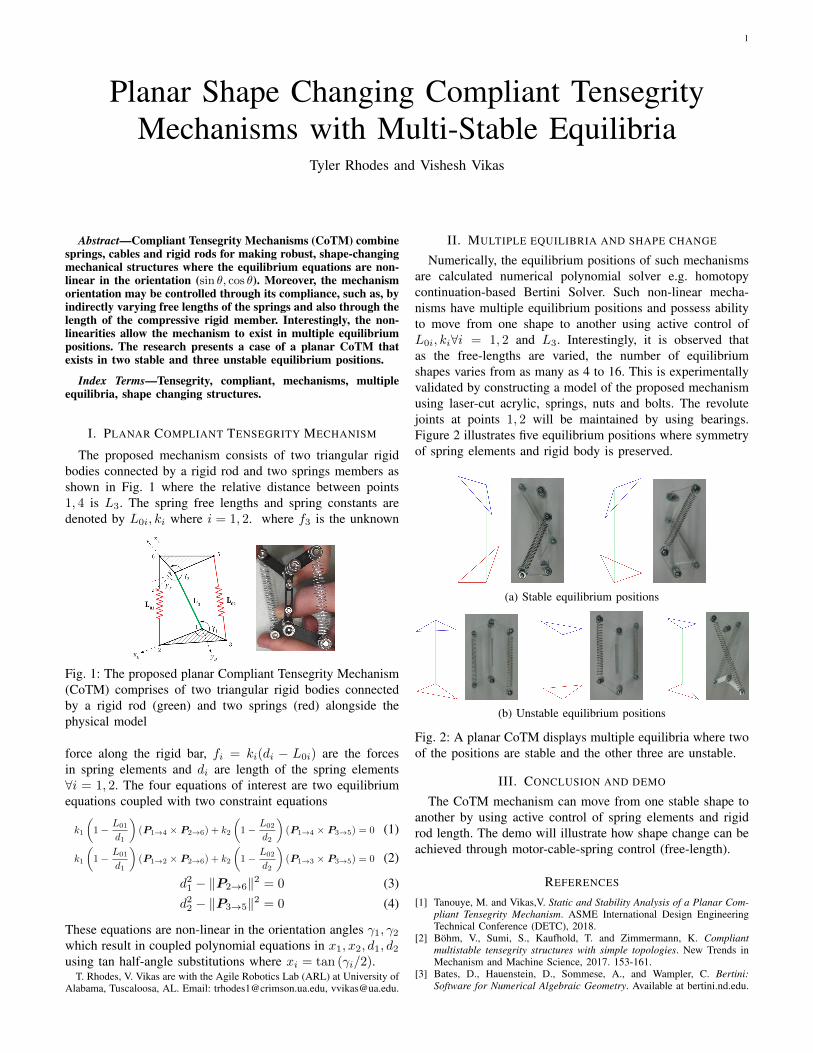
Numerically, the equilibrium positions of such mechanismsare calculated numerical polynomial solver e.g. homotopycontinuation-based Bertini Solver. Such non-linear mecha-nisms have multiple equilibrium positions and possess abilityto move from one shape to another using active control ofL0i, ki∀i = 1, 2 and L3. Interestingly, it is observed thatas the free-lengths are varied, the number of equilibriumshapes varies from as many as 4 to 16. This is experimentallyvalidated by constructing a model of the proposed mechanismusing laser-cut acrylic, springs, nuts and bolts. The revolutejoints at points 1, 2 will be maintained by using bearings.Figure 2 illustrates five equilibrium positions where symmetryof spring elements and rigid body is preserved.
(a) Stable equilibrium positions
(b) Unstable equilibrium positions
Fig. 2: A planar CoTM displays multiple equilibria where twoof the positions are stable and the other three are unstable.
III. CONCLUSION AND DEMO
The CoTM mechanism can move from one stable shape toanother by using active control of spring elements and rigidrod length. The demo will illustrate how shape change can beachieved through motor-cable-spring control (free-length).
REFERENCES
[1] Tanouye, M. and Vikas,V. Static and Stability Analysis of a Planar Com-pliant Tensegrity Mechanism. ASME International Design EngineeringTechnical Conference (DETC), 2018.
[2] Bohm, V., Sumi, S., Kaufhold, T. and Zimmermann, K. Compliantmultistable tensegrity structures with simple topologies. New Trends inMechanism and Machine Science, 2017. 153-161.
[3] Bates, D., Hauenstein, D., Sommese, A., and Wampler, C. Bertini:Software for Numerical Algebraic Geometry. Available at bertini.nd.edu.


















