Physics 2011
21
Physics 2011 Chapter 3: Motion in 2D and 3D
description
Physics 2011. Chapter 3: Motion in 2D and 3D. Describing Position in 3-Space. A vector is used to establish the position of a particle of interest. The position vector, r , locates the particle at some point in time. Average Velocity in 3-D. V avg = (ř 2 – ř 1 )/(t 2 -t 1 ) = Δ ř / Δ t - PowerPoint PPT Presentation
Transcript of Physics 2011

Physics 2011
Chapter 3:
Motion in 2D and 3D

Describing Position in 3-Space• A vector is used to establish the position of
a particle of interest.
• The position vector, r, locates the particle at some point in time.

Average Velocity in 3-D• Vavg = (ř2 – ř1)/(t2-t1) = Δř / Δt
• Δt is scalar so, V vector parallel to ř vector

Instantaneous Velocity• V’ = lim (Δř / Δt) as Δt 0 = dř / dt
• 3 Components : V’x = dx / dt, etc• Magnitude, |V’| = SQRT( Vx^2 + Vy ^2 + Vz^2)

Average Acceleration
• âavg = (v’2 – v’1)/(t2-t1) = Δv’ / Δt
• â vector parallel to Δv’ vector

Instantaneous Acceleration
• â = lim (Δv’ / Δt) as Δt 0 = dv’/ dt
• Has the 3 components: âx = d vx/ dt, etc
• These components could also be written with respect to position vector:
âx = d2x / dt2, etc

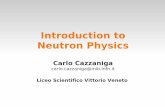
Parallel and PerpendicularComponents of Acceleration

Acceleration on Curve
• Different for a) constant speed, b) increasing speed, c) decreasing speed

Projectile Motion• Free Fall Problems in 2D or 3D are
“Projectile Motion” problems
• Projectile path is called a Trajectory

Acceleration during Projectile Motion
• The a vector is constant (g, gravity) and downward all along the projectile path

2D path, Acceleration Vector

Equations for PM

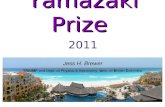
Uniform Circular Motion

What defines UCM?
• Constant SPEED (not velocity!)
• Constant Radius (R = c)
R
VV
x
y
(x,y)

UCM using Polar Coordinates• The polar coordinate
system (magnitude and angle) is a natural way of describing UCM, where R and speed are constant:
Cartesian: Polar:
Position: x, y Position: R, θ
Velocity:
Vx = dx/dt, Vy = dy/dt
Velocity:
dR/dt, dθ/dt(let ω=dθ/dt)
Vx,Vy always changing
dR/dt =0 dθ/dt=ω=constant

Velocity in Polar Form:
• Displacement is an Arc, S, of the Circle
• Displacement s = vt (like x = vt + xo)
but s = R = Rt, so:v = ωR

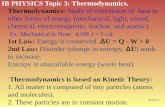
Average Acceleration in UCM:
• Average Acceleration, aavg = ΔV/Δt
• The Δ V vector points toward origin

Instantanous Acceleration in UCM
• This is called This is called Centripetal Acceleration.
• Like triangles, ΔR and ΔV:
But R = vt for small t
So:vt
vR
2 v
vv tR
vv
RR
Thus:
a = V2/R

Relative Motion
• First thing: A Frame of Reference
• Since Einstein, a distinction has to be made between references that behave classically and those that allow Relativity
• Classical frames of reference are called Intertial

Inertial Frames of Reference:• A Reference FrameReference Frame is the place you measure from.
– It allows you to nail down your (x,y,z) axes
• An Inertial Reference Frame (IRF) is one that is not accelerating.– We will consider only IRFs in this course. Stationary or
constant velocity
• Valid IRFs can have fixed velocities with respect to each other. – More about this later when we discuss forces.– For now, just remember that we can make measurements
from different vantage points.

Consider the Frames in Relative Motion:
• A plane flies due south from Duluth to MPLS at 100 m/s in a 15 m/s crosswind: