Perturbation Techniques for Models of Bursting Electrical ...miura/directory/1980-1999/1992/Bursting...
25
Perturbation Techniques for Models of Bursting Electrical Activity in Pancreatic β-Cells Author(s): M. Pernarowski, R. M. Miura, J. Kevorkian Source: SIAM Journal on Applied Mathematics, Vol. 52, No. 6 (Dec., 1992), pp. 1627-1650 Published by: Society for Industrial and Applied Mathematics Stable URL: http://www.jstor.org/stable/2102210 Accessed: 27/02/2009 08:01 Your use of the JSTOR archive indicates your acceptance of JSTOR's Terms and Conditions of Use, available at http://www.jstor.org/page/info/about/policies/terms.jsp. JSTOR's Terms and Conditions of Use provides, in part, that unless you have obtained prior permission, you may not download an entire issue of a journal or multiple copies of articles, and you may use content in the JSTOR archive only for your personal, non-commercial use. Please contact the publisher regarding any further use of this work. Publisher contact information may be obtained at http://www.jstor.org/action/showPublisher?publisherCode=siam. Each copy of any part of a JSTOR transmission must contain the same copyright notice that appears on the screen or printed page of such transmission. JSTOR is a not-for-profit organization founded in 1995 to build trusted digital archives for scholarship. We work with the scholarly community to preserve their work and the materials they rely upon, and to build a common research platform that promotes the discovery and use of these resources. For more information about JSTOR, please contact [email protected]. Society for Industrial and Applied Mathematics is collaborating with JSTOR to digitize, preserve and extend access to SIAM Journal on Applied Mathematics. http://www.jstor.org
Transcript of Perturbation Techniques for Models of Bursting Electrical ...miura/directory/1980-1999/1992/Bursting...

Perturbation Techniques for Models of Bursting Electrical Activity in Pancreatic β-CellsAuthor(s): M. Pernarowski, R. M. Miura, J. KevorkianSource: SIAM Journal on Applied Mathematics, Vol. 52, No. 6 (Dec., 1992), pp. 1627-1650Published by: Society for Industrial and Applied MathematicsStable URL: http://www.jstor.org/stable/2102210Accessed: 27/02/2009 08:01
Your use of the JSTOR archive indicates your acceptance of JSTOR's Terms and Conditions of Use, available athttp://www.jstor.org/page/info/about/policies/terms.jsp. JSTOR's Terms and Conditions of Use provides, in part, that unlessyou have obtained prior permission, you may not download an entire issue of a journal or multiple copies of articles, and youmay use content in the JSTOR archive only for your personal, non-commercial use.
Please contact the publisher regarding any further use of this work. Publisher contact information may be obtained athttp://www.jstor.org/action/showPublisher?publisherCode=siam.
Each copy of any part of a JSTOR transmission must contain the same copyright notice that appears on the screen or printedpage of such transmission.
JSTOR is a not-for-profit organization founded in 1995 to build trusted digital archives for scholarship. We work with thescholarly community to preserve their work and the materials they rely upon, and to build a common research platform thatpromotes the discovery and use of these resources. For more information about JSTOR, please contact [email protected].
Society for Industrial and Applied Mathematics is collaborating with JSTOR to digitize, preserve and extendaccess to SIAM Journal on Applied Mathematics.
http://www.jstor.org

SIAM J. APPL. MATH. ? 1992 Society for Industrial and Applied Mathematics Vol. 52, No. 6, pp. 1627-1650, December 1992 008
PERTURBATION TECHNIQUES FOR MODELS OF BURSTING ELECTRICAL ACTIVITY IN PANCREATIC ,B-CELLS*
M. PERNAROWSKIt, R. M. MIURAt, AND J. KEVORKIAN?
Abstract. Pancreatic 8-cells exhibit periodic bursting electrical activity consisting of active and silent phases. Experimentally, the ratio, pf, of the active phase duration to the overall period is correlated to the insulin response of these cells to glucose concentration. Several different mathematical models of the 8-cell have been developed to describe changes in the intracellular ionic concentrations and the ionic flow through the cellular membrane. The membrane potential in each of these models exhibits bursting patterns similar to those observed experimentally. Values of the plateau fraction, pf, can be computed from these models.
The Sherman-Rinzel-Keizer (SRK) model of this phenomenon consists of three, coupled, first-order nonlinear differential equations that describe the dynamics of the membrane potential, the activation parameter for the voltage-gated potassium channel, and the intracellular calcium concentration. These equations are transformed into a Lienard differential equation coupled to a single first-order differential equation for the slowly changing nondimensional calcium concentration. Leading-order perturbation prob- lems for the silent phase and the transition regions are reduced to quadrature. The solution of the leading-order active phase problem is a limit cycle which depends on the value of the intracellular calcium concentration. Since the active phase equations exhibit weak damping, Melnikov's method can be applied to determine the bifurcation point of these equations. Thus, an explicit expression for the active phase duration is obtained. Together with the silent phase analysis, an approximation of the plateau fraction pf is derived and its value compared to the plateau fraction numerically obtained from the SRK model.
Key words. bursting electrical activity, Melnikov's method, pancreatic 8-cells, plateau fraction, Sherman-Rinzel-Keizer model
AMS(MOS) subject classifications. 34C, 34E, 92C05
1. Introduction. Some dynamical systems exhibit "bursting" phenomena in which one of the variables undergoes a succession of alternating active and silent phases. In the active phase (or plateau) the bursting variable oscillates rapidly, whereas, in the silent phase, it evolves slowly and does not oscillate. The overall phenomenon consists of a succession of active-silent phase cycles and appears to be periodic. Many models of biological systems exhibit bursting behavior ([8], [10], [28], [31]). Most of these models are described by a set of (dimensional) nonlinear first-order differential equations governing (FAST) bursting variables and at least one (SLOW) regulator variable.
In pancreatic f3-cells, the electrical potential difference across the cellular mem- brane is observed to burst spontaneously. Such bursting electrical activity (BEA) has been correlated to the rate at which these cells release insulin. In particular, the ratio of the duration of the active phase to the overall period, i.e., the plateau fraction, is proportional to the rate at which the f3l-cell releases insulin in response to given glucose concentrations ([16], [24], [25]).
* Received by the editors June 10, 1991; accepted for publication (in revised form) November 9, 1991.
t Department of Mathematics, University of British Columbia, Vancouver, British Columbia, Canada V6T 1Z2. The work of this author was supported in part by Department of Energy grant DE-FG06-86ER25019 and by Natural Sciences and Engineering Council of Canada grant 5-84559.
t Departments of Mathematics and Pharmacology & Therapeutics and Institute of Applied Mathematics, University of British Columbia, Vancouver, British Columbia, Canada V6T 1Z2. The work of this author was supported in part by Natural Sciences and Engineering Council of Canada grant 5-84559.
? Department of Applied Mathematics, FS-20, University of Washington, Seattle, Washington 98195. The work of this author was supported in part by Department of Energy grant DE-FG06-86ER25019.
1627

1628 M. PERNAROWSKI, R. M. MIURA, AND J. KEVORKIAN
Atwater, Ribalet, and Rojas [4] devised a biophysical model of BEA in f3-cells based on a number of different experimental observations ([1], [2], [3], [14], [15], [23], [24]). This led Chay and Keizer (CK) [12] to develop the first "minimal" mathematical model of BEA. At that time certain electrophysiological data for f3-cells were not available, thus the functions that define the CK model were specified by modifying those in the Hodgkin-Huxley [18] model for electrical activity in the squid giant axon. When additional experimental data became available [33], Sherman, Rinzel, and Keizer [34] and other researchers ([9], [11], [20]) incorporated this data into their models for BEA in f3-cells.
The nonlinearities that are essential in all f3-cell models make analytical work difficult. Consequently, many researchers have studied how solutions depend on the various parameters by numerically integrating the dimensional equations ([9], [12], [17], [20], [30]). Rinzel and Lee ([29], [31], [32]) provide a qualitative description and classification of several bursting oscillators. Each oscillator is described in terms of fast and slow variables and numerically computed bifurcation diagrams which greatly clarified the classification scheme. Although some numerical averaging is done, no analytical expressions for either the active and silent phase durations or the plateau fraction are derived.
In this paper, we analyze the Sherman-Rinzel-Keizer (SRK) model [34] of BEA in f3-cells. The basic goal of the analysis is to develop the perturbation techniques needed to explain the glucose dependence in models of BEA in ,l-cells. Although the work presented here has been developed in the context of the SRK model, the methods are applicable directly to several models of BEA in pancreatic f3-cells ([9], [11], [20]).
In ? 2, the nondimensionalized SRK model is introduced and transformed into a Lienard differential equation coupled to a single first-order differential equation for the slowly changing nondimensional calcium concentration. Leading-order governing equations for the active phase, silent phase, and transition regions connecting the active and silent phases are derived in ? 3. Solutions of each of these problems in their respective regions are shown to be in good agreement with the numerical solution of the SRK equations. In particular, the leading-order silent phase equations are deter- mined by introducing a slow time Et. The Lienard form of the transformed SRK equations enables these leading-order silent phase equations to be uncoupled thus reducing their solution to a simple quadrature. The leading-order active phase solution is described by the limit cycle solution of a Lienard equation with a damping term that is shown to be small. This implies the existence of a second small parameter S that is used later in the derivation of the leading-order plateau fraction. The leading- order problems for the transition regions introduced in ? 3 describe surfaces in phase space which, together with the attracting leading-order active and silent phase mani- folds, complete the geometrical description of the overall BEA cycle.
Analytical perturbation solutions for the leading-order active phase duration, silent phase duration, and plateau fraction are derived in ? 4. It is shown that these results compare favorably with those obtained by numerically integrating the SRK equations. Although the procedure for determining these results requires some numerical computa- tions, the number of function evaluations involved in the direct integration of the SRK model is far greater. The expression that we derive for the active phase duration is based on a multiple scales expansion of the governing equations combined with the use of Melnikov's method [22] to determine a leading-order value for the bifurcation point of the active phase equations. The plateau fraction is shown to decrease with the glucose-dependent parameter, f3. Although this decrease with f3 has been observed numerically by modelers ([17], [30]), it has never been explained using a formal perturbation analysis.

PERTURBATION TECHNIQUES FOR BURSTING OSCILLATORS 1629
2. Mathematical formulation. In this section, the dimensionless SRK model is transformed and then integrated numerically. The simple transformation introduced in ? 2.1 simplifies the perturbation analysis of the silent and active phases, and leads to the form of the model on which much of the research presented in this paper is carried out. The observations made in ? 2.2 from the numerical computations identify key features of the BEA cycle and help motivate the work presented in ?? 3 and 4.
2.1. Model equations. The choices of nondimensionalized (and scaled) membrane potential v, activation variable w, calcium concentration c, and time t, are detailed in [27]. Letting ( ) denote differentiation with respect to t, the corresponding differential equations for these variables are as follows:
(2.1) v=i"'(v) - w(v+ 1) -g(c)(v + 1),
(2.2) w= (v)-w
(2.3) e= E(3ica( v) - c),
where the functions icja(v), g(c), wj(v), and rw(v) are the dimensionless calcium current, calcium-activated potassium conductance, activation function, and the relaxa- tion time, respectively. The parameter E is a measure of the small ratio of free to bound intracellular calcium ions and for the parameter values given in [27], E 0.001. An increase in glucose concentration is reflected by a decrease in the value of /3 in (2.3).
The dimensionless equation (2.1) can be simplified by introducing the change of variable
(2.4) u=ln(v+1),
which is defined for v > -1 and whose inverse is given by v = eu - 1. Then (2.1) becomes
(2.5) u = euicv(v(u)) - w -g(c),
where each term on the right side corresponds to a dimensionless conductance. In particular, the variable w should be reinterpreted as the dimensionless conductance associated with the voltage-gated potassium channel.
By eliminating w, the two first-order differential equations (2.2) and (2.5) can be combined into a single second-order differential equation which is in a perturbed Lienard form. This is accomplished by differentiating (2.5) with respect to t and using equations (2.2), (2.3), and (2.5). The resulting system of differential equations for u and c is
(2.6) ii + F(u)ui + G(u, c) = 8H(u, c),
(2.7) e(,3h(u)- c),
where by defining
(2.8) F~~~(u )--euic. (v (u)), Tn (u )--rw (v(u )),
(2.8) N(u)--wo(v(u)), h(u)--ic.(v(u)),
the functions F, G, and H are given by
(2.9) F(u) = Tn (u)-d--(u) du

1630 M. PERNAROWSKI, R. M. MIURA, AND J. KEVORKIAN
(2.10) G(u, c) = N(u)+ g(c) - F(u)
(2.11) H(u, c)= dg(c)(c- 13h(u)). dc
Throughout most of the BEA, F(u) is concave up and h(u) is a monotonically increasing function of u. Since we ultimately seek to determine the dependence of the plateau fraction on ,3, we have not absorbed ,3 into the definition of h(u). The functions F(u), T.(u), N(u), and h(u) are each positive, and F(u), G(u, c), and H(u, c) have signs that depend on the values of u and c. In particular, the sign of F(u) during the active phase is important since it determines whether the damping in (2.6) is positive or negative.
On the time scale associated with t, the coupling between (2.6) and (2.7) is weak since e = O(E) with 0< r << 1. Specifically, if e is set equal to zero in (2.6) and (2.7), then c acts as a parameter in (2.6) which formally is a Lienard differential equation.
Two advantages in studying (2.6) and (2.7) instead of (2.1)-(2.3) are: (1) the transformation (2.4) makes (2.6) quasilinear, i.e., the resulting second-order equation for v would have been quadratic in v6; and, (2) with the results presented in ? 3.2, the leading-order active phase equations can be recast as a perturbed "strongly nonlinear" oscillator for which there are well-developed perturbation techniques ([5], [6], [21], [22]).
2.2. Numerical observations. Computations on the SRK model were carried out on a DEC 3100 using the CMLIB ordinary differential equation solving routine DDRIV3. The routine was set for a Gear integrator and all computations were carried out using double precision. The relative error for most runs was fixed at 10-7 and the timestep was chosen to be sufficiently small so that the details of individual spikes could be resolved graphically.
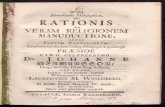
The solutions u(t) and c(t) were obtained by numerical integration of (2.6) and (2.7) and are represented in Figs. 2.1(a) and 2.1(b), respectively. The oscillations of u(t) in the active phase begin and end near those times where c = 0. The calcium cycle (cf. Fig. 2.1(b)) has values of c which increase during the active phase and decrease during the silent phase. The weak coupling between u and c during the active phase is manifest by noting the small amplitude oscillations in c.
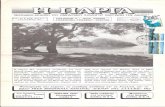
The three-dimensional BEA cycle in (u, u, c)-space are visualized using two- dimensional projections. The projections of the cycle onto the (u, ii)-plane and onto the (u, c)-plane are shown in Figs. 2.2(a) and 2.2(b), respectively. During the silent phase, the solution lies close to the i =0 plane and values of c decrease. When c becomes sufficiently small a transition to the active phase occurs. During the active phase the solution slowly spirals upwards with c increasing. When c(t) approaches its maximum value, the oscillations in the active phase terminate, a transition back to the silent phase occurs, and the entire cycle then repeats itself.
Numerical experiments with durations much longer than those shown in Fig. 2.1, show that there is a persistence of the bursting and sawtooth patterns exhibited by u and c, respectively, and that this pattern is periodic. Further numerical experiments with a variety of different initial conditions support the conjecture that the periodic BEA represents an attractive three-dimensional limit cycle in (u, a, c)-space. Initial conditions with cmin < c(0 )<Cmax result in trajectories which rapidly approach the solution shown in Fig. 2.1. If c(0) < Cmin, the initial part of the first active phase can

PERTURBATION TECHNIQUES FOR BURSTING OSCILLATORS 1631
(a)
-2.0-
0 200 400 600 800
(b) 1.30 -
1.25-
1.20 -
1 15
0 200 400 600 800
FIG. 2.1. Numerical solutions. (a) Transformed membrane potential u(t). (b) Transformed calcium concentration, c(t).
contain extra spikes. Regardless of the value of c(O), trajectories eventually exhibit a regular bursting pattern with subsequent active phases containing the same number of spikes'.
The existence of two (or more) separate time scales is very evident in Fig. 2.1(a). During the silent phase ui nearly equals zero for a time span of At -250. In contrast, the time span for each oscillation in the active phase is At -5.
The transition regions connecting the active and silent phases occur as the solution crosses the e = 0 nullcline (i.e., the surface in the (u, ui, c)-space defined by setting the right-hand side of (2.7) equal to zero) across which the sign of c changes. The position of this nullcline in (u, ui, c)-space is between the active and silent phases and explains the increasing/decreasing behavior of c in the active/silent phases of u.
3. Leading-order approximations. A complete perturbation solution of the govern- ing system (2.6) and (2.7) for a BEA cycle requires the determination of the appropriate asymptotic expansion in each part of the cycle together with a matching process to connect adjacent approximations. In this section, we consider the leading-order
' Initial conditions to compute the solution depicted in Figs. 2.1 and 2.2 were taken to be the terminal values of a long time numerical integration of (2.6) and (2.7).

1632 M. PERNAROWSKI, R. M. MIURA, AND J. KEVORKIAN
(a) 0.8-
0.4-
SE '
-a0.0 U
-0.4,
-0.8
-2.5 -2.0 -1.5 -1.0 -0.5 0.0 u
(b)
1.5 \E
1.4 -
D
A
/
1.2
B /
1.1 1 ~~~~~~~~~~~~~~~~~G(u,c) 0
-2.5 -2.0 -1.0 -0.5 0.0 u
FIG. 2.2. Projections of BEA cycle. (a) Projection onto (u, ui) -plane. Superimposed are the transition region surfaces SE and Sc, cf. (3.33) and (3.34), which lie near the BEA cycle in their respective regions. (b) Projection onto (u, c)-plane. Superimposed are the G(u, c) = 0 (dashed) surface, S, and three c (lightly dashed) nullclines, c = ,/h(u), corresponding to, from left to right, /3 =/3Bm 8 =3 3SRK, and8 =- *3(b)- The arrow shows the direction of increasing,l3. The indicatedpointscorrespond toA: (us, cs), B: (uMr, cm), C: (u,3, c93), D: (ub, cb), E: (uM, CM).
approximations of the solution in each of the four phases, but do not discuss the matching. In order to verify that the limiting differential equations we derive for each phase is consistent, we compare their solutions with a numerical integration of the exact equations. For these comparisons the appropriate initial condition for each phase is chosen to coincide with values on the exact trajectory. Our analysis shows that the leading-order approximations are in agreement with the exact numerical solution.
3.1. Silent phase. The silent phase is characterized by slow changes of both u and c on the t time scale. More specifically, du/dc is 0(1) in the silent phase (cf. Fig. 2.2(b)) and since e is 0(?), then tu must be 0(E). A slow time, t, and new dependent variables are defined by
(3.1) t = ?t, U(t; ) = U(t; ?), C(t; E) = C(t; ?).

PERTURBATION TECHNIQUES FOR BURSTING OSCILLATORS 1633
Both U and C undergo 0(1) changes on t time intervals of 0(1). If ()' denotes differentiation with respect to t, (2.6) and (2.7) become
(3.2) 2 U" +EF(U) U'+ G(U, C) = EH(U, C),
(3.3) C'=ph(U)-C.
For this singular perturbation problem we seek an outer expansion
(3.4) U(t; 0) uo(t), C(t; E) - Co(t-),
where U' is 0(1). The resulting equations for (U0, C0) are
(3.5) G(Uo,C0)= ,
(3.6) C' = h ( Uo) - Co0.
In Fig. 2.2(b), the leading-order nullcline G(u, c) = 0 of (3.2) has been superimposed onto the numerical solution of (2.6) and (2.7), and confirms the accuracy of the silent-phase leading-order orbit in (u, ui, c)-space. A complete numerical confirmation of the leading-order solution requires a comparison of the time dependence of the approximate and exact solutions.
The algebraic equation (3.5) can be solved explicitly for C0 to obtain2
(3.7) Co=Yo(Uo) ' F(U0)-N(Uo) (3.7) Co = yo(uo)~ + YKI- a (N ( U0) - F( Uo))'
A differential equation for UO(T) is found by substituting (3.7) into (3.6). The solution of the resulting differential equation
(3.8) U' - Z(Uo; .3) =Sh( Uo) - yo(Uo) Yo( Uo) -ih ( Uo) (3.8) O-, = z
( ?O9 ' =
% U) (N'( UO) - F'( Uo))(1 + yK-Ca o(U0))2
can, in principle, be found by inverting the quadrature
(3.9) t =Uo(T) Z(4; d)
The time dependence of C0 can then be determined using the solution U0( t) in (3.7). In Fig. 3.1 numerical solutions of (3.2) and (3.3) and the leading-order problem
(3.8) are compared. The initial condition for the comparison was chosen as the point (us, ii, cj) at which the exact solution crosses the G = 0 surface. The small differences between U0(7) and U(t) confirm that the leading-order silent phase dynamics closely approximate those of the exact solution. A comparison between C0( t) and C( t) is not shown because the difference between their graphs is negligible over the range of t in Fig. 3.1, cf. [26].
The G(u, c) = 0 surface, S, divides the (u, ui, c)-space into two regions with G > 0 above S and G < 0 below S. The left branch, SL, the middle branch SM, and the right branch SR of S are defined as (cf. Fig. 2.2(b) for subscript notation on u and c)
(3.10) SL = {(U, i, c): G(u, c) = 0, u < um},
(3.11) SM = {(u, U, c): G(u, c) = 0, um cu UM}
(3.12) SR = {(U, ii, c): G(u, c) = 0, u > UM},
respectively, with the local minimum, (um, cm), and local maximum, (UM, CM), of (3.7) given by y'(ujO) = 0, Cj = yo(uj) j = m, M, UM > Um.
2 Equation (3.5) cannot be solved for U0 as a function of C0, however.

1634 M. PERNAROWSKI, R. M. MIURA, AND J. KEVORKIAN
-1.5.
-1.6 - U(t)
-1.7-- uo(i)
-1.8-
-2.0-
0.00 0.05 0.10 0.15 0.20 0.25
FIG. 3.1. Exact and leading-order silent phase solutions. Shows a comparison of U( T) and UO( t).
From (3.3), the C' nullcline, Sc, is given by the middle c = fh(u) curve plotted in Fig. 2.2(b) (corresponding to ,l =/3SRK). Trajectories on the left side of Sc have decreasing c values while trajectories on the right side have increasing c values. Since Sc intersects S along SM, C'<0 along SL and C'> 0 along SR. Thus in the silent phase, the solution of (2.6) and (2.7) moves down towards the local minimum (urn, cm).
The solution cannot move up the lower part of SM (since C'<0), hence it moves to the right, away from S, into a transition region separating the silent and active phases. After crossing Sc, c(t) then begins to increase.
The leading-order approximations (3.4) are not valid near (ur, cm) as is evident from the presence of y%( UO) which vanishes in the denominator of (3.8). As the solution makes the transition to the active phase, the assumption that du/dc is 0(1) breaks down, and the slow time t in (3.1) is no longer an appropriate variable for a perturbation analysis.
3.2. Active phase. As the solution enters the active phase, both Li and G(u, c) become, and remain, 0(1). The existence of oscillations on the t= 0(1) time scale makes the ii term important. Therefore (2.6) and (2.7) are appropriately scaled for the active phase. Substituting the expansion
(3.13) u(t; E) Uio(t)+ ril(t)+ *
(3.14) c (t; ?) - o(tCott) + (t) +
into (2.6) and (2.7) implies that the leading-order problem for the active phase is
(3.15) d 2?+ F(fio) d-? + G(1o , Jo) = 0,
(3.16) 0.
Equations (3.15) and (3.16) imply that for time intervals of 0(1), each active phase oscillation can be approximated by the solution of the strictly nonlinear Lienard equation (3.15) in which c0 is a parameter. An analysis of (3.15) in the (u0, ao) -plane yields critical points located on S where the critical points on SM and SR are saddle points and unstable spirals, respectively. The numerically computed phase portrait of

PERTURBATION TECHNIQUES FOR BURSTING OSCILLATORS 1635
(3.15) shown in Fig. 3.2(a) demonstrates that (3.15) has a limit cycle solution for a fixed value of co in the range of c observed during the active phase. Since no limit cycle exists if No> CM, (3.15) must have a bifurcation at some value Cb _ CM, i.e., there is no limit cycle for jO> Cb, cf. Fig. 3.2(b). This bifurcation was observed in [31] where the "fast" subsystem analogous to (3.15) and (3.16) was discussed in the context of the Chay-Keizer model [12].
In Fig. 3.3 the numerical solution of the exact equations (2.6) and (2.7) is compared to the (numerically obtained) limit cycle solution, flo(t; co), of (3.15) and (3.16) for co= c(O). The initial condition (u(O), (du/dt)(O), c(O)) was taken as the second active phase local minimum of Fig. 2.1(a),3 whereas, (uio(O), (dio/dt)(O), jo(O)) was taken as the last local minimum in a long time integration of (3.15) and (3.16) with co= c(O).
(a) 0.8-
0.4-
0.0 -
-0.4-
-0.8
-1.4 -1.0 -0.6 - 0.2
(b) o.8-
0.4-
0.0-
-0.4
-0.8-
-1.4 -1.0 -0.6 -0.2 u
FIG. 3.2. Phase portraits of the active phase solutions. (a) Demonstrates that the leading-order active phase equations (3.15) and (3.16) have a limit cycle solution for E chosen in the active phase. (b) Shows that (3.15) and (3.16) have no limit cycle solution for O > Cb.
3The first local minimum is part of the transition region, hence it is appropriate to make a comparison using a different local minimum in the active phase.

1636 M. PERNAROWSKI, R. M. MIURA, AND J. KEVORKIAN
-0. /4
-0.6/
U(t) - OWt
-1.2 -.
265 270 275 280
t
FIcG 3.3. Comparison of exact and leading-order active phase. Shows exact and leading-order solutions u(t) and uio(t) to be quantitatively close over thefirst oscillation with discrepancies between subsequent spikes due primarily to a phase error.
Over the first oscillation, uo(t) agrees closely with the exact numerical solution. However, as c increases, the exact solution develops a progressively larger phase shift relative to the periodic limit cycle. As is obvious, the leading-order term of the regular expansion (3.13) and (3.14) cannot describe the solution for t = 0(E '), and this accounts for the observed increase in phase shift. A more appro-priate expansion using multiple time scales is discussed in ? 4.
In Fig. 3.4 the integral fo G(u(s), c(s)) ds is evaluated along the exact solution and is plotted against u for three active phase oscillations. It is noted that the resulting curve deviates little from the straight line with slope - 1, and that this behavior persists over the entire active phase. Therefore the following approximation
(3.17) G(u(s),c(s)) ds --ui, 0
0.8 - \
-0.8 / , l -
-0.8 -0.4 0.0 0.4 0.8
FIG. 3.4. Comparison of |O G(U, C) dt and ui in the active phase. Shows a nearly linear relationship with slope equal to -I over three active phase oscillations.

PERTURBATION TECHNIQUES FOR BURSTING OSCILLATORS 1637
is valid for the active phase. This observation motivated us to examine the magnitude of the damping term F(u)tU, even though F(u) is not small in the active phase. Indeed, this examination shows that
(3.18) F(u)Ui = 0(8),
where 8 is some small parameter that depends on other parameters defining (3.15). We may, for example, define
(3.19) 8 = sup { max F(fQ(t; c)) dt c) CM<C<Cb Ot-To(c) t
where TO(c) is the period of flo(t; c). Without an explicit expression for flo(t; c-), the functional dependence of 8 on the parameters defining (2.1)-(2.3) cannot be deter- mined. Nevertheless, a numerical evaluation of (3.19) yields 8 0.2 so that ?<< 8<< 1, and this permits the approximation
(3.20) ii + G(u, c) -0,
which is used in ? 4 to determine Cb.
Since 0< e = O(?) in the active phase, the exact solution of (2.6) and (2.7) spirals slowly upward in (u, tu, c)-space near the surface, SA, formed by the union of all limit cycle solutions of (3.15). As c increases, the active phase oscillations pass closer and closer to SM. When the oscillations are sufficiently close, G fails to be 0(1), (3.15) no longer admits a limit cycle solution, and (3.15) and (3.16) no longer describe the leading-order behavior of the exact solution.
3.3. Transition regions. As seen in Fig. 2.2(b), when the solution leaves the active phase, it moves away from SA and passes through an "escape" region before it is attracted to SL, in the silent phase. Similarly, as the solution leaves the silent phase, it moves away from SL and passes through a "capture" region before it is attracted to SA in the active phase. In both of these transition regions u(t) does not oscillate, c(t) changes little, and u(t) has an 0(1) change on the t time scale. We consider only the escape region since the capture problem is essentially identical (cf. [26]).
Although (3.15) and (3.16) are still appropriately scaled equations forthese regions, the leading-order transition problems can be described more simply by first-order differential equations. Introducing the new dependent variable
(3.21) xw-N(u),
the differential equations for u, x, and c are given by
(3.22) dT =-Tn (u) G(u, c)-x,
dx (1 (3.23) -x (~ T ?+N'(u)) +N'(u)T,(u)G(u, c),
(3.24) dc= ? (,h (u) - c). dit
As the solution leaves the active phase, it crosses SM at time te and then SL at time t, when it reenters the silent phase. Defining ue = u(te), xe = x(te), ce = c(te), and
us = u(ts), the parameters
(3.25) AN'=max N'(u) = N'(Ue), U max U T
(3.26) 5T,- max I T,,(u) - T,(u,), U, A-- u - U

1638 M. PERNAROWSKI, R. M. MIURA, AND J. KEVORKIAN
are well defined and are both small. Melnikov's method is used to obtain a leading-order value for Ce in ? 4. Since G(ue, ce) 0, ue then can be calculated numerically as a root finding problem. Also, since e = 0(E) for times t of 0(1) in the escape region, cs = Ce to leading-order and us also can be calculated from the condition G(uS, c)= 0. Therefore the parameters AN' and 8T- can be computed independently of the numerical solution of (2.6) and (2.7).
As shown in detail in [26], the appropriate equations for the leading-order solution (ue(t), Xe(t), ce(t)) in the escape region are
=-Tn(ue)G(Ae, Ce), (3.27) dt T U)GU
(3.28) dd e = , dt=0
(3.29) d =e0 dt 0
where
(3.30) ae(t) = u(t) + 0(IXeI) + O(8N) + O(ST") + 0(E),
(3.31) XAe(t) = x(t) + 0(IXeI) + 0(8N ) + 0(8T,,) + 0(E),
(3.32) eA(t) = C(t)?+ (?),
for time intervals At of 0(1). In Fig. 3.5, u(t) is plotted against G(u(t), c(t)) for the exact numerical solution
of (2.6) and (2.7). The closeness of this curve to the line originating from the origin with slope -Tn(Ue) and the small change in c(t) apparent in Fig. 2.2(b), confirm that the dynamics of ue(t) determined from (3.27) are correct to leading-order in the escape region.
The capture region equation corresponding to (3.27) can be obtained by replacing ue by ur in (3.27). Both of these equations describe generalized cylindrical surfaces
0.00
-0.05 -
-0.10 -
-0.15-
___-__ U = - Tn(Ue) G(u, Ce)
-0.20
0.00 0.05 0.10 0.15 0.20 0.25 0.30
G(u,c)
FIG. 3.5. Confirmation of leading-order behavior in escape region. Shows a linear relationship between G(u, c) and u in the escape region from the active phase to the silent phase. The dashed line through the origin has slope -Tn (Ue) -

PERTURBATION TECHNIQUES FOR BURSTING OSCILLATORS 1639
in (u, tu, c)-space
(3.33) SE-{(U, L, C): i =-Tn(ue)G(,uCe)},
(3-34) Sc-{(u, t, c): i =-Tn(Um)G(u, cm)}.
Thus the geometrical description of the BEA cycle in Fig. 2.2 is completed.
4. Plateau fractions for the SRK model. In this section, exact and approximate leading-order expressions for the plateau fraction pf are derived. Melnikov's method for analyzing the motion near separatrices is used to determine a leading-order value C(?) for the bifurcation point of (3.15), Cb. An averaging of the perturbed Lienard system (2.6) and (2.7) results in an averaged calcium equation that is used to determine a leading-order active phase duration. Together with the silent phase analysis in ? 3, an exact expression for the leading-order plateau fraction is derived and then numerically evaluated.
The approximate active phase duration T('02) determined in ? 4.3 has an explicitly known dependence on the glucose-dependent parameter ,B. Exact and approximate active phase durations are shown to be close in the range of ,B values for which the SRK model is valid. Although the method does require some numerical computations, the number of function evaluations to numerically integrate the full equations (2.6) and (2.7) far exceed those required for the approximation scheme.
4.1. Determination of c(?). It is evident from Fig. 3.2 that the leading-order active phase problem (3.15) and (3.16) has qualitatively different phase portraits for different values of c-0. In light of the observation (3.18), for values of J0 just below the bifurcation point, Cb, the limit cycle solution of (3.15)) lies near the separatrix, u,, of the second- order system
(4.1) ii?+G(u,, co)= 0
Thus Melnikov's method can be used to predict a critical value c(O) above which (3.15) does not have a stable limit cycle solution (i.e., for c-> c(o)). Since the limit cycle of (3.15) is the leading-order active phase solution, C(b) corresponds to the leading-order value of c(t) at the escape from the active phase, i.e., ce defined in ? 3.
Given the autonomous second-order problem
(4.2) dx = fo(X) + 5f I(X) = (xXI X2), 5 << I, dt
the unperturbed problem (8 = 0) is assumed to have a separatrix X, = (XIa, X2() satisfying
(4.3)dx'= oa) dt
and (4.3) is assumed to have a saddle point at X, = (a,,, 0). The Melnikov distance D of the autonomous system (4.2) is defined [22] as
(4.4) D = N . (x(s)-X(U))
where x(s) and x(u) are, respectively, the stable and unstable orbits emanating from Xs, and N is normal to the separatrix (cf. Fig. 4.1).
When the separatrix and the stable and unstable orbits nearly coincide,
(4.5) D = 5D1 + 0(52).

1640 M. PERNAROWCKI, R. M. MIIJRA, AND J. KEVORKIAN
N
FIG. 4.1. Geometrical representation of the Melnikov distance. The dashed curve is the separatrix of (4.3). The solid lines show the unstable and stable orbits of (4.2) traveling away from and towards the saddle point Xs. The difference vector d and the normal vector N to the separatrix are illustrated for some initial time to.
If the unperturbed problem is Hamiltonian, it can be shown ([22], [26]) that
(4.6) DI=- fo(X, (t)) A f 1(x, (t)) dt, _00
where the wedge product x A y -xIy2 - x2yI for any two vectors x = (xI, x2) and y =
(YI, Y2).
For the SRK model, the separatrix solution u, of (4.1) depends on the parameter c, hence D is a function of c-0, i.e., letting x=(xI, x2) = (u, u) in (4.2) and then comparing with (3.15), (4.6) becomes
-00 (4.7) 5DI(5-0) = {0 F (u ( t)) ti,(t)2 dt.
Moreover, D(c-0) > 0 if and only if c-0< Cb. Thus defining c(O) as the solution of
(4.8) DI(c(o)
Cb = Cb to leading-order in 8 with 8 defined in (3.19). The dependence of u, on t need not be determined to evaluate (4.7). The root
finding problem (4.8) is more easily accomplished by first converting (4.7) to an integration in the (u, tu)-phase plane. The potential function, V(u, c), and the energy on the separatrix, E,, are defined by
u
(4.9) V(u, c) G(s, c) ds, um
(4.10) E,J =I i2U? + V(Ua, c).
Since the separatrix also intersects the u-axis when U,(t)=b,> a,a, from (4.10) it follows that
(4.11) E,J= V(aW, c) = V(b,a, c).

PERTURBATION TECHNIQUES FOR BURSTING OSCILLATORS 1641
0.20-
0.15-
0.10
0.05 -
Cb(O)= 1.301 0.0o -
1.15 1.20 1.25 1.30 1.35 1.40
C
FIG. 4.2. Melnikov distance. Shows a numerically computed, leading-order Melnikov distance 8D1(c) for cm < c < CM. The leading-order value of c( t) at the escapefrom the active phase is c = c(b) obtainedfrom D1(c) = 0.
Using (4.9)-(4.11), the symmetry of the separatrix about the u-axis, and the fact that u, (t) -- a, as t -- ?oo, (4.7) becomes
'ba
(4.12) 8DI(c) = 2 F(u) /2(V(aa, c)- V(u, c)) du. a,r
In Fig. 4.2, values of 8DI(c) computed numerically from (4.12) are plotted against c (see [26] for details of the numerical calculations). As anticipated, 8D1> 0 in the active phase. The bisection method was used to solve (4.8) with 8D, evaluated from (4.12) to compute numerically the value c(o) = 1.301 ? 10-3. The small relative difference of 0.5 percent between Ce 1.295 and c(b) shows that the method is accurate.
4.2. Multiple scales expansion of calcium equation. In this section, the method of multiple scales is applied to the perturbed Lienard system in the active phase
(4.13) ii + F(u)ui + G(u, c) = EH(u, c),
(4.14) C = ?I(U, C),
for which E << 1, () = d( )/dt, and I(u, c) is positive. The unperturbed (E = 0) problem (3.15) of (4.13) is assumed to have the one-parameter family of limit cycle solutions
(4.15) u0 = fo( t; co)
with period To(j0) for the parameter jc in some interval [Ca, Cb].
Like the Kuzmak-Luke method for perturbed strongly nonlinear oscillators [21], an asymptotic solution valid to O(?) for times of O(e-1) is sought using the multiple scales expansions
(4.16) u(t) = U('r, t; ?) - Uo(T, t) + eu&(z, t)+ ***
(4.17) c(t) = C(r, t; ?) - C0(r, t) + ec1(Tr,t)+ +
with the slow time t?= et and the strained (fast) time r is defined by
(4.18) d~ = ) (7t)

1642 M. PERNAROWSKI, R. M. MIURA, AND J. KEVORKIAN
in terms of the function co(t) to be determined by the expansion procedure. Further- more, ui (r, t) and ci (r, T) are required to be periodic in r with period 1 for i = 0, 1, 2,
Using (4.16)-(4.18) in (4.13) and (4.14) gives
(4.19) acO2U0 (9U (4.19) cu~2 + &F(u0) + G(u0, co) =0, (972 (97r
(4.20) (97r
and
2 __2 ( (9 G (9G0) (92 2 + &)F(?) (9,T + 0) (c9) (F(?))+-)(9u
(4.21)
~~ 2w (92u0 du) (9uoF(o(9uo G(9G0) H(?) - 82&) d u F(o)8" dG (9 (9 t dt ( At ac
(9c1 9CO (4.22) &J-+ v=I(Uoco) (97r (9 t
for uo, u1, co, and c1 where the superscript (0) in (4.21) means evaluated at (uo, co). Since I(u, c) is positive and (4.20) implies co = co( T), t can be written as a function
of co, i.e., there is some function coo(co) such that
(4.23) o (t) = cO(co( t )).
In light of (4.23), by letting
(4.24) co = O(o(co)s,
(4.25) uo = UW(S, t),
(4.26) Too(c) =
(4.19) becomes
(4.27) d Uo+ F(Uo) (9Uo + G(Uo, co) 0,
whose solution is
(4.28) UO = Qo(s; co) = 0O(7/Oo; co)
Although the choice (4.26) sets the period in 7 of uo(r, t) to 1, the more general solution
(4.29) UO = ( P ;C) Wo
of (4.19) is required to account for the slowly varying phase 4 = +(t) of uo(r, t). Integrating (4.22) in 7 from 7 = 0 to X = 1 and using the periodicity property, we
obtain the evolution equation
(4.30) dt = (I(uo, co)) = 1(co)

PERTURBATION TECHNIQUES FOR BURSTING OSCILLATORS 1643
for co( t), where
(4.31) (y Or, t ))- y y(,, t) dr. 0
Thus, the slow evolution of co is determined by solving
TCo(t) dx (4.32) J co ( I tx)
for co(T) where, from (4.17), co(O) = c(O). Having solved (4.32) for co(t), c(T) is determined via (4.23) and (4.26) and r subsequently, by integrating (4.18). Although (4.21) must be solved to determine the remaining slow variation of uo(r, t) through the determination of f, only (4.30) is required to determine the active phase duration in ? 4.3.
4.3. Silent and active phase durations and plateau fractions. In this section, leading- order silent phase durations, active phase durations, and plateau fractions are derived. Approximate formulas are verified by making comparisons with the exact durations and plateau fractions over a range of ,B for which the SRK model exhibits BEA.
The silent phase duration, Ts is defined by
(4.33) Ts=tc ts
where tc > t, is the first time at which c(tc) yo(Um) and recall that t, is the time at which the solution crosses SL-
Since cS -c(0) the leading-order approximation u(?) of us is determined by comput- ing the left branch solution of G(us , c(b) =0. Thus noting that (3.8) is valid only for U0(7) < ur, the leading-order silent phase duration T(?) is obtained from (3.9) as
(4.34) T(,8) = 1' du us J(O) Z(u; 13)'
where the dependence of T(?) on ,B occurs solely through the function Z(u;,B). Letting ti be the time at the ith active phase local maxima, the active phase duration
Ta is defined by
(4.35) Ta tNj t-
where N,3 is the number of active phase spikes. From the numerical computations, Ta is easy to calculate. By choosing a small integration step size, say At = 0.001, consecutive values for ti can be computed to within +At by simply keeping track of the output from the numerical integrator.
A leading-order approximation for the active phase duration T(2) is obtained by integrating (4.30) over the active phase range with
(4.36) I(c) = 1h(c) - c,
(4.37) h(c) = h(u0(r, t)) dr,
and uo(r, t) given by (4.29). Since the change in c in the capture region is small, the silent phase analysis gives the leading-order lower bound of c in the active phase as cm. Using this and the fact that Ce -c(?) in (4.30) gives
1 b dc (4.38) T0(13)(,= - IhC-C a
cm h(c

1644 M. PERNAROWSKI, R. M. MIURA, AND J. KEVORKIAN
Given the definition (4.35), the plateau fraction is defined by
(4.39) Ta pf -7TB,
where the overall period of the bursting cycle TB is computed by evaluating the difference in consecutive t1 values. Since the transition region durations are small, we obtain the approximation TB -T(a) + T?). Hence (4.34) and (4.38) give the ?-indepen- dent leading-order plateau fraction p(5) as
[b) dc T___ ___ cm fh3c - c
T( ) + T( ) =c( dc du
cm fh(c)- c .uL() Z(u; )
4.4. Dependencies on f8. At extreme values of 13, absence of either the silent phase or the active phase has been observed experimentally and in numerical integrations of a variety of models. The range of ,B for which the SRK model exhibits BEA can be determined by examining the location of the e nullcline, Sc, with respect to S.
In Fig. 2.2(b), Sc curves corresponding to different 13 values are superimposed onto the 13-independent curve S. Increasing 13 in this diagram (i.e., decreasing glucose concentration) shifts the point, (u,3, c,3), where Sc intersects S leftward. If u, < um, then (u,3, c,3) is a stable critical point for (2.6) and (2.7) and a transition to the active phase cannot occur. Therefore (2.6) and (2.7) will have only a silent phase for all 13 > pm where
(4.41) I3M m
If 13 > 0 is sufficiently small, Sc will intersect SA in which case c changes sign in the active phase and the solution c oscillates up and down near SA. Since an escape from the active phase is assured only if c > 0 along SA, bursting will definitely occur if Pb <13 <Pm where
(4.42) Cb C-
and Ub is on the middle branch solution of G(ub, Cb) = 0. Hence to leading-order, Pb
is given by
(0)
()pb - h (u (o))2.717.
Therefore comparisons of exact and leading-order active phase durations, silent phase durations, and plateau fractions are made only over the interval (pr(), Pm).
In Fig. 4.3(a), exact and leading-order silent phase durations are compared. As expected, T(s) closely approximates Ts. Differentiating (4.34) with respect to 13 yields
dT(?) 1 MUm h(u) du
d13 ? J U') %(u)Z(U; p)2'
Since y%(u) < 0 along SL and h(u) > 0, the derivative in (4.44) is positive thus explaining the increase in Ts with 13.

PERTURBATION TECHNIQUES FOR BURSTING OSCILLATORS 1645
450 -
400 -/
350 /
3007
250-
250 L *o --- T ()
2.5 3.0 3.5 4.0 4.5
(b) 250 -
200
?-T (0,2)
150
100
50
2.5 3.0 3.5 4.0 4.5
(c)
0.4
i 0.3
0.2 -
0.1
2.5 3.0 3.5 4.0 4.5
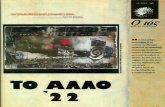
FIG. 4.3. Silent and active phase durations and plateau fractions versus /. Shows a comparison of (a) the leading-order silent phase duration T(S0) (dashed) with the silent phase duration T, (solid), (b) the approximate leading-order active phase duration T(o2) (dashed) with the active phase duration Ta (solid), and (c) the approximate leading-order plateau fraction p(0,2) (dashed) with the plateau fraction pf (solid). The solid curves were computed by integrating (2.6) and (2.7) directly. Vertical lines indicate from left to right, flb, /3SRK,
and lm.

1646 M. PERNAROWSKI, R. M. MIURA, AND J. KEVORKIAN
To compute I , the integral average (4.37) is first transformed into a form involving t, namely, (4.26) and (4.29) imply that
(4.45) h(Co) = f h(o( T-; co)) dr = T f h (Qo0(t; eo)) dt,
where the periodicity of Qo(t; eo) in t has been used to eliminate the dependence on 4b. Introducing the variable h(t) defined by
dh (4.46) dt -h(o)
a simultaneous numerical integration of (4.46) and (3.15) for a fixed value of JO gives values of h(t) that are used to evaluate (4.45). For example, choosing some initial condition for (3.15) inside the limit cycle solution and letting t(i) (i = 1, 2, 3, - - *) be the times at which the local maxima of the numerical solution for io(t) occur, t )- -* To(co) and (h(t(i+l)) - h (t(i)))/(t(i+l) - t(i)) -* h( ) as i
After computing h(c) for several different values of c, we approximate h(c) by the quadratic
(4.47) h2(c) h2c2+ hlc+ ho- h(c).
Then with an explicit evaluation of (4.38), we derive the approximate leading-order active phase duration
(4.48) - A(fl) in (C~A02)(I() 2 '(C.) + (A3))] * a /3 ?/\~~(/23) _(,Bh'(c ?))+A/(/3)M(/32'(C.) 0/))J
where
(4.49) AO(3)=Y(ph1_1)2_4ph0h2
Thus, the approximate leading-order plateau fraction is
T(0,2)
(4.50) -0 T,22) + T 0a
In Figs. 4.3(b) and 4.3(c), exact (numerical) and approximate leading-order active phase durations and plateau fractions are compared, respectively. Since transition region durations have not been included in the denominator of (4.50), p20,2) over- estimates pf in Fig. 4.3(c).
The jaggedness in the exact silent phase duration, active phase duration, and plateau fraction curves are a consequence of the fact that N,O is a discontinuous function of ,B. As ,B increases, the value of Ta defined by (4.35) decreases sharply each time the number of spikes decrease. The jaggedness of the Ts curve in Fig. 4.3(a) is also explaincd by this effect since the sharp decreases in Ta results in sharp decreases of Ce -C~(0) and hence sharp increases of u(0) in (4.34).
The difference between the Ta and T(02) curves in Fig. 4.3(b) is larger for values of ,B near the boundaries Pb and pm. Nevertheless, the agreement over the range of 13 for which the model exhibits BEA is very good, especially considering that the leading-order active phase duration is accurate only to within one or two active phase oscillations. As ,B approaches f p3m N,3 decreases and the error between Ta and T'0 gradually increases. For values of , near 8(1), the solution in the active phase spends

PERTURBATION TECHNIQUES FOR BURSTING OSCILLATORS 1647
more time near the critical value c(?). Since the quadratic approximation h2(c0) over- estimates h(co) near c(O) [26], for those values of ,B the denominator in (4.38) is overestimated thus leading to a larger discrepancy between Ta and T(02). For 13 <1(), I(u, c) changes sign in the active phase. Consequently, assumption (4.23) in the multiple scales procedure used to derive (4.38) is not valid in that parameter regime.
The decrease of Ta with 13 is explained by the sign of the derivative of (4.38) with respect to 13, namely,
(4.51) dfa2 < .o
Similarly, differentiating p(5) with respect to 18 yields
dp50) T() +T(0) d T(_) (4.52) d1I(~T) n
Since the signs of (4.44) and (4.51) imply that the ratio T(?/ T(?) decreases with , (4.52) implies that p(5) decreases with 13.
Although numerical computations are required to evaluate T('2 , these computa- tions only need to be done once to determine the dependence of T(0'2) on 18 through (4.48) and (4.49). Thus if there are N points on the p(0,2) curve, the corresponding pf curve requires roughly N times the number of calls to the numerical integrator to compute.
5. Mathematical and biological implications. In this paper, our goal has been to develop methods for the mathematical analysis of 13-cell models. Although the analysis is developed in the context of the SRK model of BEA, the techniques discussed in ? 3 and ? 4 provide a mathematical framework from which to study a larger class of models for BEA in excitable cells. This is especially relevant since different biophysical assumptions have led to many different models describing 18-cell BEA ([8-11], [17], [20], [34]). Recent physiological evidence [13] contradicts the assumption that BEA is regulated by a slowly changing intracellular calcium concentration through a calcium- activated potassium channel. However, much of the mathematical structure of the recent models remains similar to the SRK model.
For example, many of the recent models have two fast variables and are linear in the potassium channel activation variable, w ([9], [11], [34]). These two properties enable the model equations to be transformed into the Lienard form (2.6) and (2.7). Consequently, the active and silent phase analysis in ? 3 applies equally to all such models.
In the general setting, the silent phase problem can be reduced to a quadrature as in (3.9) provided the equation G(u, c) = 0 can be solved for c as a function of u as in (3.7). In the case of the SRK model, G(u, c) = 0 cannot be solved for u as a function of c. Thus the leading-order silent phase duration T(?) in (4.34) can only be expressed explicitly in terms of u. Nevertheless, even if the equation G(u, c) = 0 cannot be solved for c as a function of u, the surfaces S and SA defined by the leading-order silent and active phase solutions supply a simple geometrical picture of the bursting cycle. The ability to isolate separate active and silent phase problems via perturbation techniques represents an enormous mathematical simplification of the model equations, and helps to explain which mathematical features of these equations are most relevant for maintaining the bursting structure. As discussed in [31], for example, the position of the e nullcline with respect to S is critical for maintaining the bursting.
The smallness of the damping term F(u)ui is needed only to determine the bifurcation point c(?) for the active phase equations. Were (2.1)-(2.3) not transformed

1648 M. PERNAROWSKI, R. M. MIURA, AND J. KEVORKIAN
to (2.6) and (2.7), the smallness of
(5.1) F(u)ui== 1 dlaC(V~ v+1rY (v) dv v+1 )dt
may not have been discovered because of the complexity of the right side of (5.1). Also, the channel activation functions in recent models ([9], [11], [20]) are determined from the same experimental data [33] as the SRK model; hence it is likely that the resulting Lienard equations for these models will exhibit weak damping in the active phase. For these reasons, it is desirable to transform the model equations to the Lienard form so the bifurcation point c(O) and, consequently, the plateau fraction can be determined.
Together, the perturbation techniques of ? 3 and the Melnikov procedure in ? 4.1 provide a method for quantitatively determining a leading-order value of Cb for any bursting model of the form (2.6) and (2.7) with weak damping. It should be stressed, that even though many values of 8D1(c) were computed to make Fig. 4.2, only the value of c(O) was required to compute the approximate leading-order active phase duration in Section 4.3. Even using the inefficient bisection method4 to compute cb
the number of function evaluations required to determine Cb is far less than that required in a direct numerical integration of (2.6) and (2.7). (Furthermore, without (3.18) the analysis leading to (4.12) is not valid. And, without the transformation (2.4), (3.18) would not have been observed.)
The multiple scales technique in ? 4.2 does not require F(u)tu to be small in the active phase; however, then we cannot derive an explicit formula for h(Jo). A similar difficulty was encountered by Rinzel and Lee [31] when applying averaging techniques to the Chay-Keizer model [12]. Nevertheless, the numerical and approximation tech- niques in ? 4.3 lead to efficiently computed explicit formulas for the active phase duration and the plateau fraction.
Higher-order corrections to these leading-order formulas have not been derived. Additional analyses would be required to include effects due to: (1) the transition region durations, (2) the slow passage near the "knee" of S at (ur, cm), (3) the passage of the solution through the homoclinic orbit of (3.15) at c = Cb, and (4) an error in the value of T(?) due to omitting a phase shift analysis in the multiple scales procedure of ? 4.2. Difficulties in the latter revolve around not having an explicit formula for h(io). Some work has been done on the slow passage near "knees" in Arrhenius kinetic problems [19] and on slow passage through homoclinic orbits (separatrices) [7]. Since these papers involve systems different than (2.1)-(2.3), they are not directly applicable to the SRK model. Both of these classes of perturbation problems become important to leading-order when examining extreme values of ,B (i.e., ,3 = p3 (b) or ,B = 13m) at which the analysis presented in this paper is no longer valid.
Since ,B depends on dimensional parameters, the dependence of pf on these parameters via (4.52) in ? 4.4 is easily deduced in many cases. For the SRK model, results in that section imply that the plateau fraction increases and decreases with the dimensional parameters kca and ap3, respectively (see [26], [27] for definitions and discussions). Although the increase or decrease of pf with certain dimensional param- eters has been observed when numerically integrating the SRK and other model equations, such computations can be time consuming. Conversely, the graph of p90,2)
4A Newton method would improve the efficiency but the bisection method was chosen to ensure absolute accuracy in the calculation of c().

PERTURBATION TECHNIQUES FOR BURSTING OSCILLATORS 1649
shown in Fig. 4.3(c) gives accurate values of pf without time-consuming computations. Furthermore, the proof in (4.52) that p(f) grows with 8 requires no computations.
REFERENCES
[1] I. ATWATER, B. RIBALET, AND E. ROJAS, Cyclic changes in potential and resistance of the f3-cell membrane induced by glucose in islets of Langerhans from mouse, J. Physiol. (Lond.), 278 (1978), pp. 117-139.
[2] , Mouse pancreatic fl-cells: tetraethylammonium blockage of the potassium permeability increase induced by depolarization, J. Physiol. (Lond.), 288 (1979), pp. 561-574.
[3] I. ATWATER, C. M. DAWSON, B. RIBALET, AND E. ROJAS, Potassium permeability activated by intracellular calcium ion concentration in the pancreatic fl-cell, J. Physiol. (Lond.), 288 (1979), pp. 575-588.
[4] I. ATWATER, C. M. DAWSON, A. ScoTT, G. EDDLESTONE, AND E. ROJAS, The nature of the oscillatory behaviour in electrical activity from pancreatic fl-cell, Hormone and Metabolic Research, supp. 10 (1980), pp. 100-107.
[5] D. L. BOSLEY AND J. KEVORKIAN, Sustained resonance in very slowly varying oscillatory hamiltonian systems, SIAM J. Appl. Math., 51 (1991), pp. 439-471.
[6] F. J. BOURLAND AND R. HABERMAN, The modulated phase shift for strongly nonlinear, slowly varying, and weakly damped oscillators, SIAM J. Appl. Math., 48 (1988), pp. 737-748.
[7] , Separatrix crossing: time-invariant potentials with dissipation, SIAM J. Appl. Math., 50 (1990), pp. 1716-1744.
[8] G. A. CARPENTER, Bursting phenomena in excitable membranes, SIAM J. Appl. Math., 36 (1979), pp. 334-372.
[9] T. R. CHAY, The effect of inactivation of calcium channels by intracellular Ca21 ions in the bursting pancreatic f-cells, Cell Biophys., 11 (1987), pp. 77-91.
[10] , Electrical bursting and intracellular Ca21 oscillations in excitable cell models, Biol. Cybern., 63 (1990), pp. 15-23.
[11] T. R. CHAY AND D. L. COOK, Endogenous bursting patterns in excitable cells, Math. Biosc., 90 (1988), pp. 139-153.
[12] T. R. CHAY AND J. KEIZER, Minimal modelfor membrane oscillations in the pancreatic f3-cell, Biophys. J., 42 (1983), pp. 181-190.
[13] D. COOK, L. SATIN, AND W. F. HOPKINS, Pancreatic B cells are bursting, but how?, Trends in Neurosciences, 14 (1991), pp. 411-414.
[14] P. M. DEAN AND E. K. MATTHEWS, Glucose-induced electrical activity in pancreatic islet cells, J. Physiol. (Lond.), 210 (1970), pp. 255-264.
[15] , Electricalactivityinpancreaticisletcells: effectofions, J. Physiol. (Lond.), 210(1970),pp.265-275. [16] J. C. HENQUIN AND H. P. MEISSNER, Effects of theophylline and dibutyryl cyclic adenosine mono-
phosphate on the membrane-potential of mouse pancreatic ,8-cells, J. Physiol. (Lond.), 351 (1984), pp. 595-612.
[17] D. M. HIMMEL AND T. R. CHAY, Theoretical studies on the electrical activity of pancreatic ,f-cells as a function of glucose, Biophys. J., 51 (1987), pp. 89-107.
[18] A. L. HODGKIN AND A. F. HUXLEY, A quantitative description of membrane current and its application to conduction and excitation in nerve, J. Physiol. (Lond.), 117 (1952), pp. 500-544.
[19] A. K. KAPILA, Arrhenius systems: dynamics of jump due to slow passage through criticality, SIAM J. Appl. Math., 41 (1981), pp. 29-42.
[20] J. KEIZER AND G. MAGNUS, ATP-sensitive potassium channel and bursting in the pancreatic beta cell, Biophys. J., 56 (1989), pp. 229-242.
[21] J. KEVORKIAN AND J. D. COLE, Perturbation Methods in Applied Mathematics, Springer-Verlag, New York, 1981.
[22] A. J. LICHTENBERG AND M. A. LIEBERMAN, Regular and Stochastic Motion, Springer-Verlag, New York, 1983.
[23] H. P. MEISSNER AND M. PREISSLER, Ionic mechanisms of the glucose-induced membrane potential changes in B-cells, Hormone and Metabolic Research, supp. 10 (1980), pp. 91-99.
[24] H. P. MEISSNER AND H. SCHMELZ, Membrane potential of beta-cells in pancreatic islets, Pfluegers Arch., 351 (1974), pp. 195-206.
[25] S. OZAWA AND 0. SAND, Electrophysiology of excitable endocrine cells, Phys. Reviews, 66 (1986), pp. 887-952.

1650 M. PERNAROWSKI, R. M. MIURA, AND J. KEVORKIAN
[26] M. PERNAROWSKI, The mathematical analysis of bursting electrical activity in pancreatic beta cells, Ph. D. dissertation, University of Washington, Seattle WA, 1990.
[27] M. PERNAROWSKI, R. M. MIURA, AND J. KEVORKIAN, TheSherman-Rinzel-Keizermodelforbursting electrical activity in the pancreatic /3-cell, Differential Equation Models in Population Dynamics and Physiology, Lecture Notes in Biomathematics, Vol. 92, S. Busenberg and M. Martelli, eds., Springer-Verlag, Berlin, 1991, pp. 34-53.
[28] R. E. PLANT, Bifurcation and resonance in a modelfor bursting nerve cells, J. Math. Biol., 11 (1981), pp. 15-32.
[29] J. RINZEL, A formal classification of bursting mechanisms in excitable systems, Mathematical Topics in Population Biology, Morphogenesis, and Neurosciences, Lecture Notes in Biomathematics, Vol. 71, E. Teramoto and M. Yamaguti, eds., Springer-Verlag, Berlin, 1987, pp. 267-281.
[30] J. RINZEL, T. R. CHAY, D. HIMMEL, AND I. ATWATER, Prediction of the glucose-induced changes in membrane ionic permeability and cytosolic Ca2' by mathematical modelling, Adv. Exp. Med. Biol., 211 (1986), pp. 247-263.
[31] J. RINZEL AND Y. S. LEE, On different mechanisms for membrane potential bursting, Nonlinear Oscillations in Biology and Chemistry, Lecture Notes in Biomathematics, Vol. 66, H. G. Othmer, ed., Springer-Verlag, Berlin, 1986, pp. 19-33.
[32] , Dissection of a modelfor neuronal parabolic bursting, J. Math. Biol., 25 (1987), pp. 653-675. [33] P. RORSMAN AND G. TRUBE, Calcium and delayed potassium currents in mouse pancreatic /-cells under
voltage-clamp conditions, J. Physiol. (Lond.), 374 (1986), pp. 531-550. [34] A. SHERMAN, J. RINZEL, AND J. KEIZER, Emergence of organized bursting in clusters of pancreatic
/3-cells by channel sharing, Biophys. J., 54 (1988), pp. 411-425.