Overdetermined PDE’s in Riemannian Geometry Part III ...€¦ · We have a 1-parameter family of...
172
Overdetermined PDE’s in Riemannian Geometry Part III : general manifolds Alessandro Savo CUSO Mini-Course Workshop on Geometric Spectral Theory Neuchatel, June 19-20, 2017
Transcript of Overdetermined PDE’s in Riemannian Geometry Part III ...€¦ · We have a 1-parameter family of...

Overdetermined PDE’s in Riemannian GeometryPart III : general manifolds
Alessandro SavoCUSO Mini-Course
Workshop on Geometric Spectral TheoryNeuchatel, June 19-20, 2017

Serrin problem on manifolds : existence
We now consider compact domains in a general Riemannian manifold andstudy the Serrin problem:
∆u = 1 on Ω
u = 0,∂u
∂N= c on ∂Ω
The first question is about existence.
In any Riemannian manifold we have geodesic balls :
B(x0,R) = x ∈ M : d(x0, x) ≤ R.
They are smooth if R is small enough. But :
Are they harmonic ?
The answer is expected to be, in general, negative, unless the metric isvery ”symmetric” (space-forms and few other situations).

Serrin problem on manifolds : existence
We now consider compact domains in a general Riemannian manifold andstudy the Serrin problem:
∆u = 1 on Ω
u = 0,∂u
∂N= c on ∂Ω
The first question is about existence.
In any Riemannian manifold we have geodesic balls :
B(x0,R) = x ∈ M : d(x0, x) ≤ R.
They are smooth if R is small enough. But :
Are they harmonic ?
The answer is expected to be, in general, negative, unless the metric isvery ”symmetric” (space-forms and few other situations).

Serrin problem on manifolds : existence
We now consider compact domains in a general Riemannian manifold andstudy the Serrin problem:
∆u = 1 on Ω
u = 0,∂u
∂N= c on ∂Ω
The first question is about existence.
In any Riemannian manifold we have geodesic balls :
B(x0,R) = x ∈ M : d(x0, x) ≤ R.
They are smooth if R is small enough. But :
Are they harmonic ?
The answer is expected to be, in general, negative, unless the metric isvery ”symmetric” (space-forms and few other situations).

Serrin problem on manifolds : existence
We now consider compact domains in a general Riemannian manifold andstudy the Serrin problem:
∆u = 1 on Ω
u = 0,∂u
∂N= c on ∂Ω
The first question is about existence.
In any Riemannian manifold we have geodesic balls :
B(x0,R) = x ∈ M : d(x0, x) ≤ R.
They are smooth if R is small enough. But :
Are they harmonic ?
The answer is expected to be, in general, negative, unless the metric isvery ”symmetric” (space-forms and few other situations).

Serrin problem on manifolds : existence
We now consider compact domains in a general Riemannian manifold andstudy the Serrin problem:
∆u = 1 on Ω
u = 0,∂u
∂N= c on ∂Ω
The first question is about existence.
In any Riemannian manifold we have geodesic balls :
B(x0,R) = x ∈ M : d(x0, x) ≤ R.
They are smooth if R is small enough. But :
Are they harmonic ?
The answer is expected to be, in general, negative, unless the metric isvery ”symmetric” (space-forms and few other situations).

To be more precise: if ∂B(x0, t) have constant mean curvature for allt ≤ R, then the ball B(x0,R) will be harmonic.
Manifolds which meet this property (that is, every small geodesic ball hasboundary of constant mean curvature) are called locally harmonic. Thus:small balls in a locally harmonic manifold are, themselves, harmonicdomains.
For a general manifold, we don’t have natural candidates for harmonicdomains, and the existence question is not trivial at all.
This question was addressed in a paper by Fall and Minlend where theyprove the following facts.
Given a compact Riemannian manifold (Mn, g), there exists ε0 such that,for all ε ∈ (0, ε0) we can find a compact domain Ωε supporting a solutionuε to the Serrin problem with the following constant c:
∆uε = 1 on Ω
uε = 0,∂uε∂N
=ε
non ∂Ω
Note that the constant value εn is the same as that of a Euclidean ball.

To be more precise: if ∂B(x0, t) have constant mean curvature for allt ≤ R, then the ball B(x0,R) will be harmonic.
Manifolds which meet this property (that is, every small geodesic ball hasboundary of constant mean curvature) are called locally harmonic. Thus:small balls in a locally harmonic manifold are, themselves, harmonicdomains.
For a general manifold, we don’t have natural candidates for harmonicdomains, and the existence question is not trivial at all.
This question was addressed in a paper by Fall and Minlend where theyprove the following facts.
Given a compact Riemannian manifold (Mn, g), there exists ε0 such that,for all ε ∈ (0, ε0) we can find a compact domain Ωε supporting a solutionuε to the Serrin problem with the following constant c:
∆uε = 1 on Ω
uε = 0,∂uε∂N
=ε
non ∂Ω
Note that the constant value εn is the same as that of a Euclidean ball.

To be more precise: if ∂B(x0, t) have constant mean curvature for allt ≤ R, then the ball B(x0,R) will be harmonic.
Manifolds which meet this property (that is, every small geodesic ball hasboundary of constant mean curvature) are called locally harmonic. Thus:small balls in a locally harmonic manifold are, themselves, harmonicdomains.
For a general manifold, we don’t have natural candidates for harmonicdomains, and the existence question is not trivial at all.
This question was addressed in a paper by Fall and Minlend where theyprove the following facts.
Given a compact Riemannian manifold (Mn, g), there exists ε0 such that,for all ε ∈ (0, ε0) we can find a compact domain Ωε supporting a solutionuε to the Serrin problem with the following constant c:
∆uε = 1 on Ω
uε = 0,∂uε∂N
=ε
non ∂Ω
Note that the constant value εn is the same as that of a Euclidean ball.

To be more precise: if ∂B(x0, t) have constant mean curvature for allt ≤ R, then the ball B(x0,R) will be harmonic.
Manifolds which meet this property (that is, every small geodesic ball hasboundary of constant mean curvature) are called locally harmonic. Thus:small balls in a locally harmonic manifold are, themselves, harmonicdomains.
For a general manifold, we don’t have natural candidates for harmonicdomains, and the existence question is not trivial at all.
This question was addressed in a paper by Fall and Minlend where theyprove the following facts.
Given a compact Riemannian manifold (Mn, g), there exists ε0 such that,for all ε ∈ (0, ε0) we can find a compact domain Ωε supporting a solutionuε to the Serrin problem with the following constant c:
∆uε = 1 on Ω
uε = 0,∂uε∂N
=ε
non ∂Ω
Note that the constant value εn is the same as that of a Euclidean ball.

To be more precise: if ∂B(x0, t) have constant mean curvature for allt ≤ R, then the ball B(x0,R) will be harmonic.
Manifolds which meet this property (that is, every small geodesic ball hasboundary of constant mean curvature) are called locally harmonic. Thus:small balls in a locally harmonic manifold are, themselves, harmonicdomains.
For a general manifold, we don’t have natural candidates for harmonicdomains, and the existence question is not trivial at all.
This question was addressed in a paper by Fall and Minlend where theyprove the following facts.
Given a compact Riemannian manifold (Mn, g), there exists ε0 such that,for all ε ∈ (0, ε0) we can find a compact domain Ωε supporting a solutionuε to the Serrin problem with the following constant c:
∆uε = 1 on Ω
uε = 0,∂uε∂N
=ε
non ∂Ω
Note that the constant value εn is the same as that of a Euclidean ball.

To be more precise: if ∂B(x0, t) have constant mean curvature for allt ≤ R, then the ball B(x0,R) will be harmonic.
Manifolds which meet this property (that is, every small geodesic ball hasboundary of constant mean curvature) are called locally harmonic. Thus:small balls in a locally harmonic manifold are, themselves, harmonicdomains.
For a general manifold, we don’t have natural candidates for harmonicdomains, and the existence question is not trivial at all.
This question was addressed in a paper by Fall and Minlend where theyprove the following facts.
Given a compact Riemannian manifold (Mn, g), there exists ε0 such that,for all ε ∈ (0, ε0) we can find a compact domain Ωε supporting a solutionuε to the Serrin problem with the following constant c:
∆uε = 1 on Ω
uε = 0,∂uε∂N
=ε
non ∂Ω
Note that the constant value εn is the same as that of a Euclidean ball.

To be more precise: if ∂B(x0, t) have constant mean curvature for allt ≤ R, then the ball B(x0,R) will be harmonic.
Manifolds which meet this property (that is, every small geodesic ball hasboundary of constant mean curvature) are called locally harmonic. Thus:small balls in a locally harmonic manifold are, themselves, harmonicdomains.
For a general manifold, we don’t have natural candidates for harmonicdomains, and the existence question is not trivial at all.
This question was addressed in a paper by Fall and Minlend where theyprove the following facts.
Given a compact Riemannian manifold (Mn, g), there exists ε0 such that,for all ε ∈ (0, ε0) we can find a compact domain Ωε supporting a solutionuε to the Serrin problem with the following constant c:
∆uε = 1 on Ω
uε = 0,∂uε∂N
=ε
non ∂Ω
Note that the constant value εn is the same as that of a Euclidean ball.

This reflects the fact that Ωε is a deformation of a small geodesic ball.
We have a 1-parameter family of small harmonic domains, which howeverare not parallel nor have constant mean curvature.
It is a curious fact that, if p ∈ M is a non-degenerate critical point of thescalar curvature, then the family Ωε can be chosen to concentrate nearp as ε→ 0, and the family ∂Ωε foliate a neighborhood of such point p.
There have been several works on this concentrartion phenomenon: fromseveral points of views, the geometry of a manifold M very near a criticalpoint of its scalar curvature resembles more and more the geometry ofEuclidean space.
Perhaps one of the first results, which eventually triggered a good deal ofresearch, is due to Ye, which proved that any non degenerate criticalpoint of the scalar curvature admits a neighborhood which can befoliated by mean curvature hypersurfaces (basically, these are theboundaries of perturbed geodesic balls).

This reflects the fact that Ωε is a deformation of a small geodesic ball.
We have a 1-parameter family of small harmonic domains, which howeverare not parallel nor have constant mean curvature.
It is a curious fact that, if p ∈ M is a non-degenerate critical point of thescalar curvature, then the family Ωε can be chosen to concentrate nearp as ε→ 0, and the family ∂Ωε foliate a neighborhood of such point p.
There have been several works on this concentrartion phenomenon: fromseveral points of views, the geometry of a manifold M very near a criticalpoint of its scalar curvature resembles more and more the geometry ofEuclidean space.
Perhaps one of the first results, which eventually triggered a good deal ofresearch, is due to Ye, which proved that any non degenerate criticalpoint of the scalar curvature admits a neighborhood which can befoliated by mean curvature hypersurfaces (basically, these are theboundaries of perturbed geodesic balls).

This reflects the fact that Ωε is a deformation of a small geodesic ball.
We have a 1-parameter family of small harmonic domains, which howeverare not parallel nor have constant mean curvature.
It is a curious fact that, if p ∈ M is a non-degenerate critical point of thescalar curvature, then the family Ωε can be chosen to concentrate nearp as ε→ 0, and the family ∂Ωε foliate a neighborhood of such point p.
There have been several works on this concentrartion phenomenon: fromseveral points of views, the geometry of a manifold M very near a criticalpoint of its scalar curvature resembles more and more the geometry ofEuclidean space.
Perhaps one of the first results, which eventually triggered a good deal ofresearch, is due to Ye, which proved that any non degenerate criticalpoint of the scalar curvature admits a neighborhood which can befoliated by mean curvature hypersurfaces (basically, these are theboundaries of perturbed geodesic balls).

This reflects the fact that Ωε is a deformation of a small geodesic ball.
We have a 1-parameter family of small harmonic domains, which howeverare not parallel nor have constant mean curvature.
It is a curious fact that, if p ∈ M is a non-degenerate critical point of thescalar curvature, then the family Ωε can be chosen to concentrate nearp as ε→ 0, and the family ∂Ωε foliate a neighborhood of such point p.
There have been several works on this concentrartion phenomenon: fromseveral points of views, the geometry of a manifold M very near a criticalpoint of its scalar curvature resembles more and more the geometry ofEuclidean space.
Perhaps one of the first results, which eventually triggered a good deal ofresearch, is due to Ye, which proved that any non degenerate criticalpoint of the scalar curvature admits a neighborhood which can befoliated by mean curvature hypersurfaces (basically, these are theboundaries of perturbed geodesic balls).

This reflects the fact that Ωε is a deformation of a small geodesic ball.
We have a 1-parameter family of small harmonic domains, which howeverare not parallel nor have constant mean curvature.
It is a curious fact that, if p ∈ M is a non-degenerate critical point of thescalar curvature, then the family Ωε can be chosen to concentrate nearp as ε→ 0, and the family ∂Ωε foliate a neighborhood of such point p.
There have been several works on this concentrartion phenomenon: fromseveral points of views, the geometry of a manifold M very near a criticalpoint of its scalar curvature resembles more and more the geometry ofEuclidean space.
Perhaps one of the first results, which eventually triggered a good deal ofresearch, is due to Ye, which proved that any non degenerate criticalpoint of the scalar curvature admits a neighborhood which can befoliated by mean curvature hypersurfaces (basically, these are theboundaries of perturbed geodesic balls).

Isoparametric tubes are harmonic
We have a general notion of isoparametric tube.
By definition, the compact Riemannian manifold Ω with smoothboundary ∂Ω is called an isoparametric tube if there exists a smooth,compact submanifold P such that:
a) Ω is a tube of radius R around P, that is
Ω = x : d(x ,P) ≤ R
b) Each equidistant from P, say
Σt = x ∈ Ω : d(x ,P) = t, t ∈ (0,R],
is a smooth hypersurface having constant mean curvature.
We have seen that, in Sn, any domain bounded by an isoparametrichypersurface is an isoparametric tube.

Isoparametric tubes are harmonic
We have a general notion of isoparametric tube.
By definition, the compact Riemannian manifold Ω with smoothboundary ∂Ω is called an isoparametric tube if there exists a smooth,compact submanifold P such that:
a) Ω is a tube of radius R around P, that is
Ω = x : d(x ,P) ≤ R
b) Each equidistant from P, say
Σt = x ∈ Ω : d(x ,P) = t, t ∈ (0,R],
is a smooth hypersurface having constant mean curvature.
We have seen that, in Sn, any domain bounded by an isoparametrichypersurface is an isoparametric tube.

Isoparametric tubes are harmonic
We have a general notion of isoparametric tube.
By definition, the compact Riemannian manifold Ω with smoothboundary ∂Ω is called an isoparametric tube if there exists a smooth,compact submanifold P such that:
a) Ω is a tube of radius R around P, that is
Ω = x : d(x ,P) ≤ R
b) Each equidistant from P, say
Σt = x ∈ Ω : d(x ,P) = t, t ∈ (0,R],
is a smooth hypersurface having constant mean curvature.
We have seen that, in Sn, any domain bounded by an isoparametrichypersurface is an isoparametric tube.

Isoparametric tubes are harmonic
We have a general notion of isoparametric tube.
By definition, the compact Riemannian manifold Ω with smoothboundary ∂Ω is called an isoparametric tube if there exists a smooth,compact submanifold P such that:
a) Ω is a tube of radius R around P, that is
Ω = x : d(x ,P) ≤ R
b) Each equidistant from P, say
Σt = x ∈ Ω : d(x ,P) = t, t ∈ (0,R],
is a smooth hypersurface having constant mean curvature.
We have seen that, in Sn, any domain bounded by an isoparametrichypersurface is an isoparametric tube.

Isoparametric tubes are harmonic
We have a general notion of isoparametric tube.
By definition, the compact Riemannian manifold Ω with smoothboundary ∂Ω is called an isoparametric tube if there exists a smooth,compact submanifold P such that:
a) Ω is a tube of radius R around P, that is
Ω = x : d(x ,P) ≤ R
b) Each equidistant from P, say
Σt = x ∈ Ω : d(x ,P) = t, t ∈ (0,R],
is a smooth hypersurface having constant mean curvature.
We have seen that, in Sn, any domain bounded by an isoparametrichypersurface is an isoparametric tube.

TheoremAny isoparametric tube is a harmonic domain.
Again, we have to show that the mean exit time function u:∆u = 1 on Ω
u = 0 on ∂Ω
has constant normal derivative.
On any isoparametric tube we have the family of radial functions, definedas those functions which are constant on equidistants.
If we write ρ for the distance function to P:
ρ(x) = d(x ,P)
then the function f on Ω is radial if and only if it can be expressed
f = ψ ρ,
for a smooth function ψ : [0,R]→ R.

TheoremAny isoparametric tube is a harmonic domain.
Again, we have to show that the mean exit time function u:∆u = 1 on Ω
u = 0 on ∂Ω
has constant normal derivative.
On any isoparametric tube we have the family of radial functions, definedas those functions which are constant on equidistants.
If we write ρ for the distance function to P:
ρ(x) = d(x ,P)
then the function f on Ω is radial if and only if it can be expressed
f = ψ ρ,
for a smooth function ψ : [0,R]→ R.

TheoremAny isoparametric tube is a harmonic domain.
Again, we have to show that the mean exit time function u:∆u = 1 on Ω
u = 0 on ∂Ω
has constant normal derivative.
On any isoparametric tube we have the family of radial functions, definedas those functions which are constant on equidistants.
If we write ρ for the distance function to P:
ρ(x) = d(x ,P)
then the function f on Ω is radial if and only if it can be expressed
f = ψ ρ,
for a smooth function ψ : [0,R]→ R.

TheoremAny isoparametric tube is a harmonic domain.
Again, we have to show that the mean exit time function u:∆u = 1 on Ω
u = 0 on ∂Ω
has constant normal derivative.
On any isoparametric tube we have the family of radial functions, definedas those functions which are constant on equidistants.
If we write ρ for the distance function to P:
ρ(x) = d(x ,P)
then the function f on Ω is radial if and only if it can be expressed
f = ψ ρ,
for a smooth function ψ : [0,R]→ R.

TheoremAny isoparametric tube is a harmonic domain.
Again, we have to show that the mean exit time function u:∆u = 1 on Ω
u = 0 on ∂Ω
has constant normal derivative.
On any isoparametric tube we have the family of radial functions, definedas those functions which are constant on equidistants.
If we write ρ for the distance function to P:
ρ(x) = d(x ,P)
then the function f on Ω is radial if and only if it can be expressed
f = ψ ρ,
for a smooth function ψ : [0,R]→ R.

It is clear that it is enough to show that u is radial; in fact, if we have
u = ψ ρ
then, as N = −∇ρ, we see that on the boundary one has
∂u
∂N= 〈∇u,N〉 = −ψ′(R)
which evidently is constant on ∂Ω.
Averaging operator (radialization). We now define an operator
A : C∞(Ω)→ C∞(Ω)
which will take a function to its radialization.

It is clear that it is enough to show that u is radial; in fact, if we have
u = ψ ρ
then, as N = −∇ρ, we see that on the boundary one has
∂u
∂N= 〈∇u,N〉 = −ψ′(R)
which evidently is constant on ∂Ω.
Averaging operator (radialization). We now define an operator
A : C∞(Ω)→ C∞(Ω)
which will take a function to its radialization.

It is clear that it is enough to show that u is radial; in fact, if we have
u = ψ ρ
then, as N = −∇ρ, we see that on the boundary one has
∂u
∂N= 〈∇u,N〉 = −ψ′(R)
which evidently is constant on ∂Ω.
Averaging operator (radialization). We now define an operator
A : C∞(Ω)→ C∞(Ω)
which will take a function to its radialization.

Recall that Ω is foliated by the equidistants (level sets of the distancefunction ρ), hence any point x belongs to a unique equidistant;
if x ∈ Ω \ P this will be the regular hypersurface
Σx = ρ−1(ρ(x));
and if x ∈ P then it will be simply P (the unique singular leaf).
Given f ∈ C∞(Ω) and x ∈ Ω \ P we define Af (x) as the average of f onthe equidistant through x :
Af (x) =1
|Σx |
∫Σx
f ;
if x ∈ P we simply define
Af (x) =1
|P|
∫P
f ,
where of course we use in both cases the measure induced by theRiemannian metric on Σx and P, respectively.

Recall that Ω is foliated by the equidistants (level sets of the distancefunction ρ), hence any point x belongs to a unique equidistant;
if x ∈ Ω \ P this will be the regular hypersurface
Σx = ρ−1(ρ(x));
and if x ∈ P then it will be simply P (the unique singular leaf).
Given f ∈ C∞(Ω) and x ∈ Ω \ P we define Af (x) as the average of f onthe equidistant through x :
Af (x) =1
|Σx |
∫Σx
f ;
if x ∈ P we simply define
Af (x) =1
|P|
∫P
f ,
where of course we use in both cases the measure induced by theRiemannian metric on Σx and P, respectively.

Recall that Ω is foliated by the equidistants (level sets of the distancefunction ρ), hence any point x belongs to a unique equidistant;
if x ∈ Ω \ P this will be the regular hypersurface
Σx = ρ−1(ρ(x));
and if x ∈ P then it will be simply P (the unique singular leaf).
Given f ∈ C∞(Ω) and x ∈ Ω \ P we define Af (x) as the average of f onthe equidistant through x :
Af (x) =1
|Σx |
∫Σx
f ;
if x ∈ P we simply define
Af (x) =1
|P|
∫P
f ,
where of course we use in both cases the measure induced by theRiemannian metric on Σx and P, respectively.

Recall that Ω is foliated by the equidistants (level sets of the distancefunction ρ), hence any point x belongs to a unique equidistant;
if x ∈ Ω \ P this will be the regular hypersurface
Σx = ρ−1(ρ(x));
and if x ∈ P then it will be simply P (the unique singular leaf).
Given f ∈ C∞(Ω) and x ∈ Ω \ P we define Af (x) as the average of f onthe equidistant through x :
Af (x) =1
|Σx |
∫Σx
f ;
if x ∈ P we simply define
Af (x) =1
|P|
∫P
f ,
where of course we use in both cases the measure induced by theRiemannian metric on Σx and P, respectively.

If f ∈ C∞(Ω) its radialization Af has the following properties:
Af is smooth as well;
Af is radial;
f is radial if and only if Af = f .
The crucial property of an isoparametric foliation is the constancy of themean curvature of the leaves. This has the following importantconsequence.
The radialization commutes with the Laplacian: A∆f = ∆Af .
All the above facts are not difficult to prove (only a little technical attimes).

If f ∈ C∞(Ω) its radialization Af has the following properties:
Af is smooth as well;
Af is radial;
f is radial if and only if Af = f .
The crucial property of an isoparametric foliation is the constancy of themean curvature of the leaves. This has the following importantconsequence.
The radialization commutes with the Laplacian: A∆f = ∆Af .
All the above facts are not difficult to prove (only a little technical attimes).

If f ∈ C∞(Ω) its radialization Af has the following properties:
Af is smooth as well;
Af is radial;
f is radial if and only if Af = f .
The crucial property of an isoparametric foliation is the constancy of themean curvature of the leaves. This has the following importantconsequence.
The radialization commutes with the Laplacian: A∆f = ∆Af .
All the above facts are not difficult to prove (only a little technical attimes).

If f ∈ C∞(Ω) its radialization Af has the following properties:
Af is smooth as well;
Af is radial;
f is radial if and only if Af = f .
The crucial property of an isoparametric foliation is the constancy of themean curvature of the leaves. This has the following importantconsequence.
The radialization commutes with the Laplacian: A∆f = ∆Af .
All the above facts are not difficult to prove (only a little technical attimes).

If f ∈ C∞(Ω) its radialization Af has the following properties:
Af is smooth as well;
Af is radial;
f is radial if and only if Af = f .
The crucial property of an isoparametric foliation is the constancy of themean curvature of the leaves. This has the following importantconsequence.
The radialization commutes with the Laplacian: A∆f = ∆Af .
All the above facts are not difficult to prove (only a little technical attimes).

If f ∈ C∞(Ω) its radialization Af has the following properties:
Af is smooth as well;
Af is radial;
f is radial if and only if Af = f .
The crucial property of an isoparametric foliation is the constancy of themean curvature of the leaves. This has the following importantconsequence.
The radialization commutes with the Laplacian: A∆f = ∆Af .
All the above facts are not difficult to prove (only a little technical attimes).

If f ∈ C∞(Ω) its radialization Af has the following properties:
Af is smooth as well;
Af is radial;
f is radial if and only if Af = f .
The crucial property of an isoparametric foliation is the constancy of themean curvature of the leaves. This has the following importantconsequence.
The radialization commutes with the Laplacian: A∆f = ∆Af .
All the above facts are not difficult to prove (only a little technical attimes).

We can now prove that the mean exit time function u is radial; for that itis enough to show that
Au = u.
Let u = Au. Then, as the radialization commutes with the Laplacian:
∆u = ∆Au = A∆u = A1 = 1,
and of course u = 0 on ∂Ω.
Then, u and u are two solutions of the boundary value problem∆u = 1
u = 0 on ∂Ω
By uniqueness, they must coincide, hence Au = u, as asserted.

We can now prove that the mean exit time function u is radial; for that itis enough to show that
Au = u.
Let u = Au. Then, as the radialization commutes with the Laplacian:
∆u = ∆Au = A∆u = A1 = 1,
and of course u = 0 on ∂Ω.
Then, u and u are two solutions of the boundary value problem∆u = 1
u = 0 on ∂Ω
By uniqueness, they must coincide, hence Au = u, as asserted.

We can now prove that the mean exit time function u is radial; for that itis enough to show that
Au = u.
Let u = Au. Then, as the radialization commutes with the Laplacian:
∆u = ∆Au = A∆u = A1 = 1,
and of course u = 0 on ∂Ω.
Then, u and u are two solutions of the boundary value problem∆u = 1
u = 0 on ∂Ω
By uniqueness, they must coincide, hence Au = u, as asserted.

Classification ?We have seen that every isoparametric tube is a harmonic domain.
Is the converse also true ?
If true, this will give a quite rigid and significant geometric structure tosuch manifolds.
The answer, however, is negative, and the counterexamples we giveintroduce an interesting class of harmonic domains : the minimal freeboundary immersions.
Recall that a hypersurface of a Riemannian manifold is minimal if it haseverywhere vanishing mean curvature.
If Σ is a minimal hypersurface of Rn, and B(x0,R) is a Euclidean ball,the manifold with boundary (or, a connected component of it)
Ω = Σ ∩ B(x0,R)
is called an extrinsic ball. Note that Ω has dimension n − 1 and that theboundary ∂Ω is contained in the sphere ∂B(x0,R).
An interesting case is when, at each point of the boundary, the tangentspace to Ω is orthogonal to the sphere: we then say that Ω meets ∂Borthogonally.

Classification ?We have seen that every isoparametric tube is a harmonic domain.
Is the converse also true ?
If true, this will give a quite rigid and significant geometric structure tosuch manifolds.
The answer, however, is negative, and the counterexamples we giveintroduce an interesting class of harmonic domains : the minimal freeboundary immersions.
Recall that a hypersurface of a Riemannian manifold is minimal if it haseverywhere vanishing mean curvature.
If Σ is a minimal hypersurface of Rn, and B(x0,R) is a Euclidean ball,the manifold with boundary (or, a connected component of it)
Ω = Σ ∩ B(x0,R)
is called an extrinsic ball. Note that Ω has dimension n − 1 and that theboundary ∂Ω is contained in the sphere ∂B(x0,R).
An interesting case is when, at each point of the boundary, the tangentspace to Ω is orthogonal to the sphere: we then say that Ω meets ∂Borthogonally.

Classification ?We have seen that every isoparametric tube is a harmonic domain.
Is the converse also true ?
If true, this will give a quite rigid and significant geometric structure tosuch manifolds.
The answer, however, is negative, and the counterexamples we giveintroduce an interesting class of harmonic domains : the minimal freeboundary immersions.
Recall that a hypersurface of a Riemannian manifold is minimal if it haseverywhere vanishing mean curvature.
If Σ is a minimal hypersurface of Rn, and B(x0,R) is a Euclidean ball,the manifold with boundary (or, a connected component of it)
Ω = Σ ∩ B(x0,R)
is called an extrinsic ball. Note that Ω has dimension n − 1 and that theboundary ∂Ω is contained in the sphere ∂B(x0,R).
An interesting case is when, at each point of the boundary, the tangentspace to Ω is orthogonal to the sphere: we then say that Ω meets ∂Borthogonally.

Classification ?We have seen that every isoparametric tube is a harmonic domain.
Is the converse also true ?
If true, this will give a quite rigid and significant geometric structure tosuch manifolds.
The answer, however, is negative, and the counterexamples we giveintroduce an interesting class of harmonic domains : the minimal freeboundary immersions.
Recall that a hypersurface of a Riemannian manifold is minimal if it haseverywhere vanishing mean curvature.
If Σ is a minimal hypersurface of Rn, and B(x0,R) is a Euclidean ball,the manifold with boundary (or, a connected component of it)
Ω = Σ ∩ B(x0,R)
is called an extrinsic ball. Note that Ω has dimension n − 1 and that theboundary ∂Ω is contained in the sphere ∂B(x0,R).
An interesting case is when, at each point of the boundary, the tangentspace to Ω is orthogonal to the sphere: we then say that Ω meets ∂Borthogonally.

Classification ?We have seen that every isoparametric tube is a harmonic domain.
Is the converse also true ?
If true, this will give a quite rigid and significant geometric structure tosuch manifolds.
The answer, however, is negative, and the counterexamples we giveintroduce an interesting class of harmonic domains : the minimal freeboundary immersions.
Recall that a hypersurface of a Riemannian manifold is minimal if it haseverywhere vanishing mean curvature.
If Σ is a minimal hypersurface of Rn, and B(x0,R) is a Euclidean ball,the manifold with boundary (or, a connected component of it)
Ω = Σ ∩ B(x0,R)
is called an extrinsic ball. Note that Ω has dimension n − 1 and that theboundary ∂Ω is contained in the sphere ∂B(x0,R).
An interesting case is when, at each point of the boundary, the tangentspace to Ω is orthogonal to the sphere: we then say that Ω meets ∂Borthogonally.

Classification ?We have seen that every isoparametric tube is a harmonic domain.
Is the converse also true ?
If true, this will give a quite rigid and significant geometric structure tosuch manifolds.
The answer, however, is negative, and the counterexamples we giveintroduce an interesting class of harmonic domains : the minimal freeboundary immersions.
Recall that a hypersurface of a Riemannian manifold is minimal if it haseverywhere vanishing mean curvature.
If Σ is a minimal hypersurface of Rn, and B(x0,R) is a Euclidean ball,the manifold with boundary (or, a connected component of it)
Ω = Σ ∩ B(x0,R)
is called an extrinsic ball. Note that Ω has dimension n − 1 and that theboundary ∂Ω is contained in the sphere ∂B(x0,R).
An interesting case is when, at each point of the boundary, the tangentspace to Ω is orthogonal to the sphere: we then say that Ω meets ∂Borthogonally.

Classification ?We have seen that every isoparametric tube is a harmonic domain.
Is the converse also true ?
If true, this will give a quite rigid and significant geometric structure tosuch manifolds.
The answer, however, is negative, and the counterexamples we giveintroduce an interesting class of harmonic domains : the minimal freeboundary immersions.
Recall that a hypersurface of a Riemannian manifold is minimal if it haseverywhere vanishing mean curvature.
If Σ is a minimal hypersurface of Rn, and B(x0,R) is a Euclidean ball,the manifold with boundary (or, a connected component of it)
Ω = Σ ∩ B(x0,R)
is called an extrinsic ball. Note that Ω has dimension n − 1 and that theboundary ∂Ω is contained in the sphere ∂B(x0,R).
An interesting case is when, at each point of the boundary, the tangentspace to Ω is orthogonal to the sphere: we then say that Ω meets ∂Borthogonally.

Let Bn be the unit ball of Rn centered at the origin.
A minimal free boundary hypersurface is a minimal hypersurface Ω of Bn
such that ∂Ω ⊆ ∂Bn and Ω meets ∂Bn orthogonally.
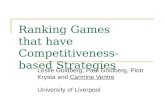
Examples in B3.
Flat disk (cross-section of B3 with a plane through the origin).
The critical catenoid (picture).
Up until few years ago, these were the only known minimal free boundaryhypersurfaces. Then, the following examples, found by Fraser andSchoen, were discovered.
Given any positive integer k, there exists a (minimal) free boundaryembedding of a (genus zero) surface Ωk with k boundary componentsinto B3.
By then other existence results were proved.

Let Bn be the unit ball of Rn centered at the origin.
A minimal free boundary hypersurface is a minimal hypersurface Ω of Bn
such that ∂Ω ⊆ ∂Bn and Ω meets ∂Bn orthogonally.
Examples in B3.
Flat disk (cross-section of B3 with a plane through the origin).
The critical catenoid (picture).
Up until few years ago, these were the only known minimal free boundaryhypersurfaces. Then, the following examples, found by Fraser andSchoen, were discovered.
Given any positive integer k, there exists a (minimal) free boundaryembedding of a (genus zero) surface Ωk with k boundary componentsinto B3.
By then other existence results were proved.

Let Bn be the unit ball of Rn centered at the origin.
A minimal free boundary hypersurface is a minimal hypersurface Ω of Bn
such that ∂Ω ⊆ ∂Bn and Ω meets ∂Bn orthogonally.
Examples in B3.
Flat disk (cross-section of B3 with a plane through the origin).
The critical catenoid (picture).
Up until few years ago, these were the only known minimal free boundaryhypersurfaces. Then, the following examples, found by Fraser andSchoen, were discovered.
Given any positive integer k, there exists a (minimal) free boundaryembedding of a (genus zero) surface Ωk with k boundary componentsinto B3.
By then other existence results were proved.

Let Bn be the unit ball of Rn centered at the origin.
A minimal free boundary hypersurface is a minimal hypersurface Ω of Bn
such that ∂Ω ⊆ ∂Bn and Ω meets ∂Bn orthogonally.
Examples in B3.
Flat disk (cross-section of B3 with a plane through the origin).
The critical catenoid (picture).
Up until few years ago, these were the only known minimal free boundaryhypersurfaces. Then, the following examples, found by Fraser andSchoen, were discovered.
Given any positive integer k, there exists a (minimal) free boundaryembedding of a (genus zero) surface Ωk with k boundary componentsinto B3.
By then other existence results were proved.

Let Bn be the unit ball of Rn centered at the origin.
A minimal free boundary hypersurface is a minimal hypersurface Ω of Bn
such that ∂Ω ⊆ ∂Bn and Ω meets ∂Bn orthogonally.
Examples in B3.
Flat disk (cross-section of B3 with a plane through the origin).
The critical catenoid (picture).
Up until few years ago, these were the only known minimal free boundaryhypersurfaces. Then, the following examples, found by Fraser andSchoen, were discovered.
Given any positive integer k, there exists a (minimal) free boundaryembedding of a (genus zero) surface Ωk with k boundary componentsinto B3.
By then other existence results were proved.

Let Bn be the unit ball of Rn centered at the origin.
A minimal free boundary hypersurface is a minimal hypersurface Ω of Bn
such that ∂Ω ⊆ ∂Bn and Ω meets ∂Bn orthogonally.
Examples in B3.
Flat disk (cross-section of B3 with a plane through the origin).
The critical catenoid (picture).
Up until few years ago, these were the only known minimal free boundaryhypersurfaces. Then, the following examples, found by Fraser andSchoen, were discovered.
Given any positive integer k, there exists a (minimal) free boundaryembedding of a (genus zero) surface Ωk with k boundary componentsinto B3.
By then other existence results were proved.

Let Bn be the unit ball of Rn centered at the origin.
A minimal free boundary hypersurface is a minimal hypersurface Ω of Bn
such that ∂Ω ⊆ ∂Bn and Ω meets ∂Bn orthogonally.
Examples in B3.
Flat disk (cross-section of B3 with a plane through the origin).
The critical catenoid (picture).
Up until few years ago, these were the only known minimal free boundaryhypersurfaces. Then, the following examples, found by Fraser andSchoen, were discovered.
Given any positive integer k, there exists a (minimal) free boundaryembedding of a (genus zero) surface Ωk with k boundary componentsinto B3.
By then other existence results were proved.

Let Bn be the unit ball of Rn centered at the origin.
A minimal free boundary hypersurface is a minimal hypersurface Ω of Bn
such that ∂Ω ⊆ ∂Bn and Ω meets ∂Bn orthogonally.
Examples in B3.
Flat disk (cross-section of B3 with a plane through the origin).
The critical catenoid (picture).
Up until few years ago, these were the only known minimal free boundaryhypersurfaces. Then, the following examples, found by Fraser andSchoen, were discovered.
Given any positive integer k, there exists a (minimal) free boundaryembedding of a (genus zero) surface Ωk with k boundary componentsinto B3.
By then other existence results were proved.

Minimal free boundary hypersurfaces are harmonicFor the proof, we start by observing the following crucial fact.
The restriction of any coordinate function xj to a minimal hypersurface isharmonic.
Let now x be the position vector, so that |x |2 =∑
j x2j . We are going to
restrict the function |x |2 to Ω, and denote ∆ the Laplacian of Ω.
Using the above fact one shows that then:
∆|x |2 = −(2n − 2).
Clearly, |x |2 = 1 on ∂Ω hence 1− |x |2 vanishes on ∂Ω.
The conclusion is that the mean exit time function of Ω is given by:
u(x) =1
2n − 2(1− |x |2).
It remains to show that the normal derivative of u is constant on ∂Ω.This follows because, on ∂Ω, one has ∇u collinear with x , and that
N = −x because Ω meets ∂B orthogonally. Then∂u
∂N=
1
n − 1.

Minimal free boundary hypersurfaces are harmonicFor the proof, we start by observing the following crucial fact.
The restriction of any coordinate function xj to a minimal hypersurface isharmonic.
Let now x be the position vector, so that |x |2 =∑
j x2j . We are going to
restrict the function |x |2 to Ω, and denote ∆ the Laplacian of Ω.
Using the above fact one shows that then:
∆|x |2 = −(2n − 2).
Clearly, |x |2 = 1 on ∂Ω hence 1− |x |2 vanishes on ∂Ω.
The conclusion is that the mean exit time function of Ω is given by:
u(x) =1
2n − 2(1− |x |2).
It remains to show that the normal derivative of u is constant on ∂Ω.This follows because, on ∂Ω, one has ∇u collinear with x , and that
N = −x because Ω meets ∂B orthogonally. Then∂u
∂N=
1
n − 1.

Minimal free boundary hypersurfaces are harmonicFor the proof, we start by observing the following crucial fact.
The restriction of any coordinate function xj to a minimal hypersurface isharmonic.
Let now x be the position vector, so that |x |2 =∑
j x2j . We are going to
restrict the function |x |2 to Ω, and denote ∆ the Laplacian of Ω.
Using the above fact one shows that then:
∆|x |2 = −(2n − 2).
Clearly, |x |2 = 1 on ∂Ω hence 1− |x |2 vanishes on ∂Ω.
The conclusion is that the mean exit time function of Ω is given by:
u(x) =1
2n − 2(1− |x |2).
It remains to show that the normal derivative of u is constant on ∂Ω.This follows because, on ∂Ω, one has ∇u collinear with x , and that
N = −x because Ω meets ∂B orthogonally. Then∂u
∂N=
1
n − 1.

Minimal free boundary hypersurfaces are harmonicFor the proof, we start by observing the following crucial fact.
The restriction of any coordinate function xj to a minimal hypersurface isharmonic.
Let now x be the position vector, so that |x |2 =∑
j x2j . We are going to
restrict the function |x |2 to Ω, and denote ∆ the Laplacian of Ω.
Using the above fact one shows that then:
∆|x |2 = −(2n − 2).
Clearly, |x |2 = 1 on ∂Ω hence 1− |x |2 vanishes on ∂Ω.
The conclusion is that the mean exit time function of Ω is given by:
u(x) =1
2n − 2(1− |x |2).
It remains to show that the normal derivative of u is constant on ∂Ω.This follows because, on ∂Ω, one has ∇u collinear with x , and that
N = −x because Ω meets ∂B orthogonally. Then∂u
∂N=
1
n − 1.

Minimal free boundary hypersurfaces are harmonicFor the proof, we start by observing the following crucial fact.
The restriction of any coordinate function xj to a minimal hypersurface isharmonic.
Let now x be the position vector, so that |x |2 =∑
j x2j . We are going to
restrict the function |x |2 to Ω, and denote ∆ the Laplacian of Ω.
Using the above fact one shows that then:
∆|x |2 = −(2n − 2).
Clearly, |x |2 = 1 on ∂Ω hence 1− |x |2 vanishes on ∂Ω.
The conclusion is that the mean exit time function of Ω is given by:
u(x) =1
2n − 2(1− |x |2).
It remains to show that the normal derivative of u is constant on ∂Ω.This follows because, on ∂Ω, one has ∇u collinear with x , and that
N = −x because Ω meets ∂B orthogonally. Then∂u
∂N=
1
n − 1.

Minimal free boundary hypersurfaces are harmonicFor the proof, we start by observing the following crucial fact.
The restriction of any coordinate function xj to a minimal hypersurface isharmonic.
Let now x be the position vector, so that |x |2 =∑
j x2j . We are going to
restrict the function |x |2 to Ω, and denote ∆ the Laplacian of Ω.
Using the above fact one shows that then:
∆|x |2 = −(2n − 2).
Clearly, |x |2 = 1 on ∂Ω hence 1− |x |2 vanishes on ∂Ω.
The conclusion is that the mean exit time function of Ω is given by:
u(x) =1
2n − 2(1− |x |2).
It remains to show that the normal derivative of u is constant on ∂Ω.This follows because, on ∂Ω, one has ∇u collinear with x , and that
N = −x because Ω meets ∂B orthogonally. Then∂u
∂N=
1
n − 1.

Now, consider any minimal free boundary surface in B3 with at least 3boundary components, as in Fraser and Schoen.
This is a harmonic domain but cannot be an isoparametric tube, fortopological reasons:
any tube over a connected submanifold can have at most two boundarycomponents (the boundary of a solid tube around P is homeomorphic tothe unit normal bundle of P).
So, the classification problem of harmonic domains in Riemannianmanifolds is an open and interesting problem, because it will imply, inparticular, a classification of minimal free boundary immersions.
In the next section we will consider another overdetermined problem,which is stronger than the Serrin problem, and for which a classificationin the Riemannian case is actually possible.

Now, consider any minimal free boundary surface in B3 with at least 3boundary components, as in Fraser and Schoen.
This is a harmonic domain but cannot be an isoparametric tube, fortopological reasons:
any tube over a connected submanifold can have at most two boundarycomponents (the boundary of a solid tube around P is homeomorphic tothe unit normal bundle of P).
So, the classification problem of harmonic domains in Riemannianmanifolds is an open and interesting problem, because it will imply, inparticular, a classification of minimal free boundary immersions.
In the next section we will consider another overdetermined problem,which is stronger than the Serrin problem, and for which a classificationin the Riemannian case is actually possible.

Now, consider any minimal free boundary surface in B3 with at least 3boundary components, as in Fraser and Schoen.
This is a harmonic domain but cannot be an isoparametric tube, fortopological reasons:
any tube over a connected submanifold can have at most two boundarycomponents (the boundary of a solid tube around P is homeomorphic tothe unit normal bundle of P).
So, the classification problem of harmonic domains in Riemannianmanifolds is an open and interesting problem, because it will imply, inparticular, a classification of minimal free boundary immersions.
In the next section we will consider another overdetermined problem,which is stronger than the Serrin problem, and for which a classificationin the Riemannian case is actually possible.

Now, consider any minimal free boundary surface in B3 with at least 3boundary components, as in Fraser and Schoen.
This is a harmonic domain but cannot be an isoparametric tube, fortopological reasons:
any tube over a connected submanifold can have at most two boundarycomponents (the boundary of a solid tube around P is homeomorphic tothe unit normal bundle of P).
So, the classification problem of harmonic domains in Riemannianmanifolds is an open and interesting problem, because it will imply, inparticular, a classification of minimal free boundary immersions.
In the next section we will consider another overdetermined problem,which is stronger than the Serrin problem, and for which a classificationin the Riemannian case is actually possible.

Now, consider any minimal free boundary surface in B3 with at least 3boundary components, as in Fraser and Schoen.
This is a harmonic domain but cannot be an isoparametric tube, fortopological reasons:
any tube over a connected submanifold can have at most two boundarycomponents (the boundary of a solid tube around P is homeomorphic tothe unit normal bundle of P).
So, the classification problem of harmonic domains in Riemannianmanifolds is an open and interesting problem, because it will imply, inparticular, a classification of minimal free boundary immersions.
In the next section we will consider another overdetermined problem,which is stronger than the Serrin problem, and for which a classificationin the Riemannian case is actually possible.

The constant flow property
We describe here an overdetermined problem for the heat equation.
Let Ω be a compact Riemannian manifold with smooth boundary, and letu = u(t, x) be the solution of the heat equation on Ω with initial data 1and Dirichlet boundary conditions.
If we write ut(x).
= u(t, x) this means that∆ut +
∂ut
∂t= 0 on Ω
u0 = 1
ut = 0 on ∂Ω.
The physical interpretation is the following: u(t, x) is the temperature attime t > 0, at the point x ∈ Ω, assuming the initial temperature isuniformly constant, equal to 1, and that the boundary is subject toabsolute refrigeration.
Note u(t, x) =∫
Ωk(t, x , y) dy , where k(t, x , y) is the heat kernel of Ω.

The constant flow property
We describe here an overdetermined problem for the heat equation.
Let Ω be a compact Riemannian manifold with smooth boundary, and letu = u(t, x) be the solution of the heat equation on Ω with initial data 1and Dirichlet boundary conditions.
If we write ut(x).
= u(t, x) this means that∆ut +
∂ut
∂t= 0 on Ω
u0 = 1
ut = 0 on ∂Ω.
The physical interpretation is the following: u(t, x) is the temperature attime t > 0, at the point x ∈ Ω, assuming the initial temperature isuniformly constant, equal to 1, and that the boundary is subject toabsolute refrigeration.
Note u(t, x) =∫
Ωk(t, x , y) dy , where k(t, x , y) is the heat kernel of Ω.

The constant flow property
We describe here an overdetermined problem for the heat equation.
Let Ω be a compact Riemannian manifold with smooth boundary, and letu = u(t, x) be the solution of the heat equation on Ω with initial data 1and Dirichlet boundary conditions.
If we write ut(x).
= u(t, x) this means that∆ut +
∂ut
∂t= 0 on Ω
u0 = 1
ut = 0 on ∂Ω.
The physical interpretation is the following: u(t, x) is the temperature attime t > 0, at the point x ∈ Ω, assuming the initial temperature isuniformly constant, equal to 1, and that the boundary is subject toabsolute refrigeration.
Note u(t, x) =∫
Ωk(t, x , y) dy , where k(t, x , y) is the heat kernel of Ω.

The constant flow property
We describe here an overdetermined problem for the heat equation.
Let Ω be a compact Riemannian manifold with smooth boundary, and letu = u(t, x) be the solution of the heat equation on Ω with initial data 1and Dirichlet boundary conditions.
If we write ut(x).
= u(t, x) this means that∆ut +
∂ut
∂t= 0 on Ω
u0 = 1
ut = 0 on ∂Ω.
The physical interpretation is the following: u(t, x) is the temperature attime t > 0, at the point x ∈ Ω, assuming the initial temperature isuniformly constant, equal to 1, and that the boundary is subject toabsolute refrigeration.
Note u(t, x) =∫
Ωk(t, x , y) dy , where k(t, x , y) is the heat kernel of Ω.

The constant flow property
We describe here an overdetermined problem for the heat equation.
Let Ω be a compact Riemannian manifold with smooth boundary, and letu = u(t, x) be the solution of the heat equation on Ω with initial data 1and Dirichlet boundary conditions.
If we write ut(x).
= u(t, x) this means that∆ut +
∂ut
∂t= 0 on Ω
u0 = 1
ut = 0 on ∂Ω.
The physical interpretation is the following: u(t, x) is the temperature attime t > 0, at the point x ∈ Ω, assuming the initial temperature isuniformly constant, equal to 1, and that the boundary is subject toabsolute refrigeration.
Note u(t, x) =∫
Ωk(t, x , y) dy , where k(t, x , y) is the heat kernel of Ω.

The constant flow property
We describe here an overdetermined problem for the heat equation.
Let Ω be a compact Riemannian manifold with smooth boundary, and letu = u(t, x) be the solution of the heat equation on Ω with initial data 1and Dirichlet boundary conditions.
If we write ut(x).
= u(t, x) this means that∆ut +
∂ut
∂t= 0 on Ω
u0 = 1
ut = 0 on ∂Ω.
The physical interpretation is the following: u(t, x) is the temperature attime t > 0, at the point x ∈ Ω, assuming the initial temperature isuniformly constant, equal to 1, and that the boundary is subject toabsolute refrigeration.
Note u(t, x) =∫
Ωk(t, x , y) dy , where k(t, x , y) is the heat kernel of Ω.

By the maximum principle, ut is positive on the interior of Ω.
We now turn our attention to the total heat content of Ω, which is thefunction of time:
H(t) =
∫Ω
ut .
It is smooth on (0,∞) and, reasonably, should be a decreasing functionof t. In fact,
H ′(t) =d
dt
∫Ω
ut =
∫Ω
∂ut
∂t= −
∫Ω
∆ut = −∫∂Ω
∂ut
∂N.
The function∂ut
∂N
gives, at any point y ∈ ∂Ω, the pointwise heat flow at y .
It is a smooth, positive function defined on ∂Ω (hence, in particularH ′(t) < 0 for all t).

By the maximum principle, ut is positive on the interior of Ω.
We now turn our attention to the total heat content of Ω, which is thefunction of time:
H(t) =
∫Ω
ut .
It is smooth on (0,∞) and, reasonably, should be a decreasing functionof t. In fact,
H ′(t) =d
dt
∫Ω
ut =
∫Ω
∂ut
∂t= −
∫Ω
∆ut = −∫∂Ω
∂ut
∂N.
The function∂ut
∂N
gives, at any point y ∈ ∂Ω, the pointwise heat flow at y .
It is a smooth, positive function defined on ∂Ω (hence, in particularH ′(t) < 0 for all t).

By the maximum principle, ut is positive on the interior of Ω.
We now turn our attention to the total heat content of Ω, which is thefunction of time:
H(t) =
∫Ω
ut .
It is smooth on (0,∞) and, reasonably, should be a decreasing functionof t. In fact,
H ′(t) =d
dt
∫Ω
ut =
∫Ω
∂ut
∂t= −
∫Ω
∆ut = −∫∂Ω
∂ut
∂N.
The function∂ut
∂N
gives, at any point y ∈ ∂Ω, the pointwise heat flow at y .
It is a smooth, positive function defined on ∂Ω (hence, in particularH ′(t) < 0 for all t).

By the maximum principle, ut is positive on the interior of Ω.
We now turn our attention to the total heat content of Ω, which is thefunction of time:
H(t) =
∫Ω
ut .
It is smooth on (0,∞) and, reasonably, should be a decreasing functionof t. In fact,
H ′(t) =d
dt
∫Ω
ut =
∫Ω
∂ut
∂t= −
∫Ω
∆ut = −∫∂Ω
∂ut
∂N.
The function∂ut
∂N
gives, at any point y ∈ ∂Ω, the pointwise heat flow at y .
It is a smooth, positive function defined on ∂Ω (hence, in particularH ′(t) < 0 for all t).

By the maximum principle, ut is positive on the interior of Ω.
We now turn our attention to the total heat content of Ω, which is thefunction of time:
H(t) =
∫Ω
ut .
It is smooth on (0,∞) and, reasonably, should be a decreasing functionof t. In fact,
H ′(t) =d
dt
∫Ω
ut =
∫Ω
∂ut
∂t= −
∫Ω
∆ut = −∫∂Ω
∂ut
∂N.
The function∂ut
∂N
gives, at any point y ∈ ∂Ω, the pointwise heat flow at y .
It is a smooth, positive function defined on ∂Ω (hence, in particularH ′(t) < 0 for all t).

We expect that, for a general domain, the heat flow∂ut
∂Nis not constant
on ∂Ω.
We say that Ω has the constant flow property if, for all fixed t > 0, the
normal derivative∂ut
∂Nis a constant function on ∂Ω.
This additional request gives rise to an overdetermined problem, whichcan then be written:
∆ut +∂ut
∂t= 0
u0 = 1 on Ω
ut = 0,∂ut
∂N= ψ(t) on ∂Ω for all t > 0
(1)
for a suitable smooth function ψ of the only variable t ∈ (0,∞).

We expect that, for a general domain, the heat flow∂ut
∂Nis not constant
on ∂Ω.
We say that Ω has the constant flow property if, for all fixed t > 0, the
normal derivative∂ut
∂Nis a constant function on ∂Ω.
This additional request gives rise to an overdetermined problem, whichcan then be written:
∆ut +∂ut
∂t= 0
u0 = 1 on Ω
ut = 0,∂ut
∂N= ψ(t) on ∂Ω for all t > 0
(1)
for a suitable smooth function ψ of the only variable t ∈ (0,∞).

We expect that, for a general domain, the heat flow∂ut
∂Nis not constant
on ∂Ω.
We say that Ω has the constant flow property if, for all fixed t > 0, the
normal derivative∂ut
∂Nis a constant function on ∂Ω.
This additional request gives rise to an overdetermined problem, whichcan then be written:
∆ut +∂ut
∂t= 0
u0 = 1 on Ω
ut = 0,∂ut
∂N= ψ(t) on ∂Ω for all t > 0
(1)
for a suitable smooth function ψ of the only variable t ∈ (0,∞).

Perfect heat diffusers
Domains with the constant flow property are perfect heat diffusers in thefollowing sense.
Given a smooth function φ ∈ C∞(∂Ω), define
φt(x).
= φ(t, x)
as the solution of the heat equation on Ω with boundary conditionsprescribed by the function φ(x) (at all times) and zero initial conditions.
That is, φt is the unique solution of the problem:∆φt +
∂φt∂t
= 0
φ0 = 0
φt = φ on ∂Ω, for all t > 0

Perfect heat diffusers
Domains with the constant flow property are perfect heat diffusers in thefollowing sense.
Given a smooth function φ ∈ C∞(∂Ω), define
φt(x).
= φ(t, x)
as the solution of the heat equation on Ω with boundary conditionsprescribed by the function φ(x) (at all times) and zero initial conditions.
That is, φt is the unique solution of the problem:∆φt +
∂φt∂t
= 0
φ0 = 0
φt = φ on ∂Ω, for all t > 0

Perfect heat diffusers
Domains with the constant flow property are perfect heat diffusers in thefollowing sense.
Given a smooth function φ ∈ C∞(∂Ω), define
φt(x).
= φ(t, x)
as the solution of the heat equation on Ω with boundary conditionsprescribed by the function φ(x) (at all times) and zero initial conditions.
That is, φt is the unique solution of the problem:∆φt +
∂φt∂t
= 0
φ0 = 0
φt = φ on ∂Ω, for all t > 0

Let
Hφ(t) =
∫Ω
φ(t, x)dx
be the heat content at time t with boundary data φ. Clearly Hφ(0) = 0.
TheoremΩ has the CFP iff Hφ(t) = 0 for all t ≥ 0 and for all φ ∈ C∞0 (∂Ω)(smooth functions on ∂Ω with zero mean).
The theorem says that if Ω has the constant flow property, and if thetotal boundary heat is zero at all times, then also the total inner heatcontent is identically zero at all times.
At x ∈ ∂Ω the boundary acts as a refrigerator if φ(x) < 0, and acts as aheater if φ(x) > 0.
Then CFP holds if and only if the incoming heat flow is perfectlybalanced, at all times, by the outgoing heat flow.

Let
Hφ(t) =
∫Ω
φ(t, x)dx
be the heat content at time t with boundary data φ. Clearly Hφ(0) = 0.
TheoremΩ has the CFP iff Hφ(t) = 0 for all t ≥ 0 and for all φ ∈ C∞0 (∂Ω)(smooth functions on ∂Ω with zero mean).
The theorem says that if Ω has the constant flow property, and if thetotal boundary heat is zero at all times, then also the total inner heatcontent is identically zero at all times.
At x ∈ ∂Ω the boundary acts as a refrigerator if φ(x) < 0, and acts as aheater if φ(x) > 0.
Then CFP holds if and only if the incoming heat flow is perfectlybalanced, at all times, by the outgoing heat flow.

Let
Hφ(t) =
∫Ω
φ(t, x)dx
be the heat content at time t with boundary data φ. Clearly Hφ(0) = 0.
TheoremΩ has the CFP iff Hφ(t) = 0 for all t ≥ 0 and for all φ ∈ C∞0 (∂Ω)(smooth functions on ∂Ω with zero mean).
The theorem says that if Ω has the constant flow property, and if thetotal boundary heat is zero at all times, then also the total inner heatcontent is identically zero at all times.
At x ∈ ∂Ω the boundary acts as a refrigerator if φ(x) < 0, and acts as aheater if φ(x) > 0.
Then CFP holds if and only if the incoming heat flow is perfectlybalanced, at all times, by the outgoing heat flow.

Let
Hφ(t) =
∫Ω
φ(t, x)dx
be the heat content at time t with boundary data φ. Clearly Hφ(0) = 0.
TheoremΩ has the CFP iff Hφ(t) = 0 for all t ≥ 0 and for all φ ∈ C∞0 (∂Ω)(smooth functions on ∂Ω with zero mean).
The theorem says that if Ω has the constant flow property, and if thetotal boundary heat is zero at all times, then also the total inner heatcontent is identically zero at all times.
At x ∈ ∂Ω the boundary acts as a refrigerator if φ(x) < 0, and acts as aheater if φ(x) > 0.
Then CFP holds if and only if the incoming heat flow is perfectlybalanced, at all times, by the outgoing heat flow.

Let
Hφ(t) =
∫Ω
φ(t, x)dx
be the heat content at time t with boundary data φ. Clearly Hφ(0) = 0.
TheoremΩ has the CFP iff Hφ(t) = 0 for all t ≥ 0 and for all φ ∈ C∞0 (∂Ω)(smooth functions on ∂Ω with zero mean).
The theorem says that if Ω has the constant flow property, and if thetotal boundary heat is zero at all times, then also the total inner heatcontent is identically zero at all times.
At x ∈ ∂Ω the boundary acts as a refrigerator if φ(x) < 0, and acts as aheater if φ(x) > 0.
Then CFP holds if and only if the incoming heat flow is perfectlybalanced, at all times, by the outgoing heat flow.

It turns out that the CFP property is stronger than harmonicity.
Any domain with the CFP is also harmonic, that is, it supports a solutionto the Serrin problem.
This can be justified as follows. Introduce the function
v(x) =
∫ ∞0
u(t, x) dt.
Note that the integral converges because u(t, x) decreases to zeroexponentially fast as t →∞.
In fact it can be shown that, as t →∞
u(t, x) ∼ ce−λ1tφ1(x)
where λ1 is the first Dirichlet eigenvalue of Ω and φ1(x) is a (normalized)first eigenfunction.
One sees that∆v = 1
and moreover v = 0 on ∂Ω. Hence v is the mean-exit time function of Ω.
If Ω has the CFP one sees that, differentiating in the normal direction,
one has∂v
∂N= c as well.

It turns out that the CFP property is stronger than harmonicity.
Any domain with the CFP is also harmonic, that is, it supports a solutionto the Serrin problem.
This can be justified as follows. Introduce the function
v(x) =
∫ ∞0
u(t, x) dt.
Note that the integral converges because u(t, x) decreases to zeroexponentially fast as t →∞.
In fact it can be shown that, as t →∞
u(t, x) ∼ ce−λ1tφ1(x)
where λ1 is the first Dirichlet eigenvalue of Ω and φ1(x) is a (normalized)first eigenfunction.
One sees that∆v = 1
and moreover v = 0 on ∂Ω. Hence v is the mean-exit time function of Ω.
If Ω has the CFP one sees that, differentiating in the normal direction,
one has∂v
∂N= c as well.

It turns out that the CFP property is stronger than harmonicity.
Any domain with the CFP is also harmonic, that is, it supports a solutionto the Serrin problem.
This can be justified as follows. Introduce the function
v(x) =
∫ ∞0
u(t, x) dt.
Note that the integral converges because u(t, x) decreases to zeroexponentially fast as t →∞.
In fact it can be shown that, as t →∞
u(t, x) ∼ ce−λ1tφ1(x)
where λ1 is the first Dirichlet eigenvalue of Ω and φ1(x) is a (normalized)first eigenfunction.
One sees that∆v = 1
and moreover v = 0 on ∂Ω. Hence v is the mean-exit time function of Ω.
If Ω has the CFP one sees that, differentiating in the normal direction,
one has∂v
∂N= c as well.

It turns out that the CFP property is stronger than harmonicity.
Any domain with the CFP is also harmonic, that is, it supports a solutionto the Serrin problem.
This can be justified as follows. Introduce the function
v(x) =
∫ ∞0
u(t, x) dt.
Note that the integral converges because u(t, x) decreases to zeroexponentially fast as t →∞.
In fact it can be shown that, as t →∞
u(t, x) ∼ ce−λ1tφ1(x)
where λ1 is the first Dirichlet eigenvalue of Ω and φ1(x) is a (normalized)first eigenfunction.
One sees that∆v = 1
and moreover v = 0 on ∂Ω. Hence v is the mean-exit time function of Ω.
If Ω has the CFP one sees that, differentiating in the normal direction,
one has∂v
∂N= c as well.

It turns out that the CFP property is stronger than harmonicity.
Any domain with the CFP is also harmonic, that is, it supports a solutionto the Serrin problem.
This can be justified as follows. Introduce the function
v(x) =
∫ ∞0
u(t, x) dt.
Note that the integral converges because u(t, x) decreases to zeroexponentially fast as t →∞.
In fact it can be shown that, as t →∞
u(t, x) ∼ ce−λ1tφ1(x)
where λ1 is the first Dirichlet eigenvalue of Ω and φ1(x) is a (normalized)first eigenfunction.
One sees that∆v = 1
and moreover v = 0 on ∂Ω. Hence v is the mean-exit time function of Ω.
If Ω has the CFP one sees that, differentiating in the normal direction,
one has∂v
∂N= c as well.

It turns out that the CFP property is stronger than harmonicity.
Any domain with the CFP is also harmonic, that is, it supports a solutionto the Serrin problem.
This can be justified as follows. Introduce the function
v(x) =
∫ ∞0
u(t, x) dt.
Note that the integral converges because u(t, x) decreases to zeroexponentially fast as t →∞.
In fact it can be shown that, as t →∞
u(t, x) ∼ ce−λ1tφ1(x)
where λ1 is the first Dirichlet eigenvalue of Ω and φ1(x) is a (normalized)first eigenfunction.
One sees that∆v = 1
and moreover v = 0 on ∂Ω. Hence v is the mean-exit time function of Ω.
If Ω has the CFP one sees that, differentiating in the normal direction,
one has∂v
∂N= c as well.

It turns out that the CFP property is stronger than harmonicity.
Any domain with the CFP is also harmonic, that is, it supports a solutionto the Serrin problem.
This can be justified as follows. Introduce the function
v(x) =
∫ ∞0
u(t, x) dt.
Note that the integral converges because u(t, x) decreases to zeroexponentially fast as t →∞.
In fact it can be shown that, as t →∞
u(t, x) ∼ ce−λ1tφ1(x)
where λ1 is the first Dirichlet eigenvalue of Ω and φ1(x) is a (normalized)first eigenfunction.
One sees that∆v = 1
and moreover v = 0 on ∂Ω. Hence v is the mean-exit time function of Ω.
If Ω has the CFP one sees that, differentiating in the normal direction,
one has∂v
∂N= c as well.

Because of the rigidity of Serrin problem, we have:
The only domains in Rn,Hn and Sn+ having the CFP are geodesic
geodesic balls.
What about existence of domains with CFP ? Here considerations similarto the Serrin problem apply.
TheoremAny isoparametric tube has the constant flow property.
For the proof, recall that the radialization A commutes with theLaplacian. To show that the temperature function ut has constantnormal derivative (for all t), it is enough to show that it is radial, or that:
Aut = ut .
The argument is the same as before: the function Aut is still a solutionof the heat equation, with initial condition equal to Au0 = 1 and,obviously, Dirichlet boundary conditions.
As the initial and boundary values data of Aut are the same as those ofut , we have by uniqueness Aut = ut .

Because of the rigidity of Serrin problem, we have:
The only domains in Rn,Hn and Sn+ having the CFP are geodesic
geodesic balls.
What about existence of domains with CFP ? Here considerations similarto the Serrin problem apply.
TheoremAny isoparametric tube has the constant flow property.
For the proof, recall that the radialization A commutes with theLaplacian. To show that the temperature function ut has constantnormal derivative (for all t), it is enough to show that it is radial, or that:
Aut = ut .
The argument is the same as before: the function Aut is still a solutionof the heat equation, with initial condition equal to Au0 = 1 and,obviously, Dirichlet boundary conditions.
As the initial and boundary values data of Aut are the same as those ofut , we have by uniqueness Aut = ut .

Because of the rigidity of Serrin problem, we have:
The only domains in Rn,Hn and Sn+ having the CFP are geodesic
geodesic balls.
What about existence of domains with CFP ? Here considerations similarto the Serrin problem apply.
TheoremAny isoparametric tube has the constant flow property.
For the proof, recall that the radialization A commutes with theLaplacian. To show that the temperature function ut has constantnormal derivative (for all t), it is enough to show that it is radial, or that:
Aut = ut .
The argument is the same as before: the function Aut is still a solutionof the heat equation, with initial condition equal to Au0 = 1 and,obviously, Dirichlet boundary conditions.
As the initial and boundary values data of Aut are the same as those ofut , we have by uniqueness Aut = ut .

Because of the rigidity of Serrin problem, we have:
The only domains in Rn,Hn and Sn+ having the CFP are geodesic
geodesic balls.
What about existence of domains with CFP ? Here considerations similarto the Serrin problem apply.
TheoremAny isoparametric tube has the constant flow property.
For the proof, recall that the radialization A commutes with theLaplacian. To show that the temperature function ut has constantnormal derivative (for all t), it is enough to show that it is radial, or that:
Aut = ut .
The argument is the same as before: the function Aut is still a solutionof the heat equation, with initial condition equal to Au0 = 1 and,obviously, Dirichlet boundary conditions.
As the initial and boundary values data of Aut are the same as those ofut , we have by uniqueness Aut = ut .

Because of the rigidity of Serrin problem, we have:
The only domains in Rn,Hn and Sn+ having the CFP are geodesic
geodesic balls.
What about existence of domains with CFP ? Here considerations similarto the Serrin problem apply.
TheoremAny isoparametric tube has the constant flow property.
For the proof, recall that the radialization A commutes with theLaplacian. To show that the temperature function ut has constantnormal derivative (for all t), it is enough to show that it is radial, or that:
Aut = ut .
The argument is the same as before: the function Aut is still a solutionof the heat equation, with initial condition equal to Au0 = 1 and,obviously, Dirichlet boundary conditions.
As the initial and boundary values data of Aut are the same as those ofut , we have by uniqueness Aut = ut .

Because of the rigidity of Serrin problem, we have:
The only domains in Rn,Hn and Sn+ having the CFP are geodesic
geodesic balls.
What about existence of domains with CFP ? Here considerations similarto the Serrin problem apply.
TheoremAny isoparametric tube has the constant flow property.
For the proof, recall that the radialization A commutes with theLaplacian. To show that the temperature function ut has constantnormal derivative (for all t), it is enough to show that it is radial, or that:
Aut = ut .
The argument is the same as before: the function Aut is still a solutionof the heat equation, with initial condition equal to Au0 = 1 and,obviously, Dirichlet boundary conditions.
As the initial and boundary values data of Aut are the same as those ofut , we have by uniqueness Aut = ut .

Because of the rigidity of Serrin problem, we have:
The only domains in Rn,Hn and Sn+ having the CFP are geodesic
geodesic balls.
What about existence of domains with CFP ? Here considerations similarto the Serrin problem apply.
TheoremAny isoparametric tube has the constant flow property.
For the proof, recall that the radialization A commutes with theLaplacian. To show that the temperature function ut has constantnormal derivative (for all t), it is enough to show that it is radial, or that:
Aut = ut .
The argument is the same as before: the function Aut is still a solutionof the heat equation, with initial condition equal to Au0 = 1 and,obviously, Dirichlet boundary conditions.
As the initial and boundary values data of Aut are the same as those ofut , we have by uniqueness Aut = ut .

Geometric rigidity
So far, we have isolated a whole class of manifolds with the constant flowproperty, the isoparametric tubes.
We can ask if there are other ”exotic” examples.
We prove that, for analytic metrics, isoparametricity is also a necessarycondition for having the constant flow property. Here is the main result.
Theorem(S. 2016) Let Ω be a compact analytic manifold with smooth boundary.Assume that it has the constant flow property. Then Ω is anisoparametric tube around a minimal submanifold of M.
Then, we have a complete characterization, in the analytic case, of theclass of domains with the constant flow property: this class coincideswith the class of isoparametric tubes.
This also gives an analytic characterization of the isoparametric condition.

Geometric rigidity
So far, we have isolated a whole class of manifolds with the constant flowproperty, the isoparametric tubes.
We can ask if there are other ”exotic” examples.
We prove that, for analytic metrics, isoparametricity is also a necessarycondition for having the constant flow property. Here is the main result.
Theorem(S. 2016) Let Ω be a compact analytic manifold with smooth boundary.Assume that it has the constant flow property. Then Ω is anisoparametric tube around a minimal submanifold of M.
Then, we have a complete characterization, in the analytic case, of theclass of domains with the constant flow property: this class coincideswith the class of isoparametric tubes.
This also gives an analytic characterization of the isoparametric condition.

Geometric rigidity
So far, we have isolated a whole class of manifolds with the constant flowproperty, the isoparametric tubes.
We can ask if there are other ”exotic” examples.
We prove that, for analytic metrics, isoparametricity is also a necessarycondition for having the constant flow property. Here is the main result.
Theorem(S. 2016) Let Ω be a compact analytic manifold with smooth boundary.Assume that it has the constant flow property. Then Ω is anisoparametric tube around a minimal submanifold of M.
Then, we have a complete characterization, in the analytic case, of theclass of domains with the constant flow property: this class coincideswith the class of isoparametric tubes.
This also gives an analytic characterization of the isoparametric condition.

Geometric rigidity
So far, we have isolated a whole class of manifolds with the constant flowproperty, the isoparametric tubes.
We can ask if there are other ”exotic” examples.
We prove that, for analytic metrics, isoparametricity is also a necessarycondition for having the constant flow property. Here is the main result.
Theorem(S. 2016) Let Ω be a compact analytic manifold with smooth boundary.Assume that it has the constant flow property. Then Ω is anisoparametric tube around a minimal submanifold of M.
Then, we have a complete characterization, in the analytic case, of theclass of domains with the constant flow property: this class coincideswith the class of isoparametric tubes.
This also gives an analytic characterization of the isoparametric condition.

Geometric rigidity
So far, we have isolated a whole class of manifolds with the constant flowproperty, the isoparametric tubes.
We can ask if there are other ”exotic” examples.
We prove that, for analytic metrics, isoparametricity is also a necessarycondition for having the constant flow property. Here is the main result.
Theorem(S. 2016) Let Ω be a compact analytic manifold with smooth boundary.Assume that it has the constant flow property. Then Ω is anisoparametric tube around a minimal submanifold of M.
Then, we have a complete characterization, in the analytic case, of theclass of domains with the constant flow property: this class coincideswith the class of isoparametric tubes.
This also gives an analytic characterization of the isoparametric condition.

Geometric rigidity
So far, we have isolated a whole class of manifolds with the constant flowproperty, the isoparametric tubes.
We can ask if there are other ”exotic” examples.
We prove that, for analytic metrics, isoparametricity is also a necessarycondition for having the constant flow property. Here is the main result.
Theorem(S. 2016) Let Ω be a compact analytic manifold with smooth boundary.Assume that it has the constant flow property. Then Ω is anisoparametric tube around a minimal submanifold of M.
Then, we have a complete characterization, in the analytic case, of theclass of domains with the constant flow property: this class coincideswith the class of isoparametric tubes.
This also gives an analytic characterization of the isoparametric condition.

We explain the main steps of the proof.
Step 1. The mean curvature is radial.
Define a function η in a neighborhood of ∂Ω as follows:
η(x) = mean curvature of Σx at x
where Σx is the equidistant to the boundary containing x .
In fact, η = ∆ρ where ρ : Ω→ R is the distance function to theboundary.
The aim in the first step is to show that η is radial, that is, it is constanton equidistants to the boundary. This is the main tool for proving that.
TheoremLet Ω be a smooth (not necessarily analytic) Riemannian manifold.Assume that Ω has the CFP. Then:
∂kη
∂Nk= ck = constant on ∂Ω
for all k = 0, 1, 2, . . . .

We explain the main steps of the proof.
Step 1. The mean curvature is radial.
Define a function η in a neighborhood of ∂Ω as follows:
η(x) = mean curvature of Σx at x
where Σx is the equidistant to the boundary containing x .
In fact, η = ∆ρ where ρ : Ω→ R is the distance function to theboundary.
The aim in the first step is to show that η is radial, that is, it is constanton equidistants to the boundary. This is the main tool for proving that.
TheoremLet Ω be a smooth (not necessarily analytic) Riemannian manifold.Assume that Ω has the CFP. Then:
∂kη
∂Nk= ck = constant on ∂Ω
for all k = 0, 1, 2, . . . .

We explain the main steps of the proof.
Step 1. The mean curvature is radial.
Define a function η in a neighborhood of ∂Ω as follows:
η(x) = mean curvature of Σx at x
where Σx is the equidistant to the boundary containing x .
In fact, η = ∆ρ where ρ : Ω→ R is the distance function to theboundary.
The aim in the first step is to show that η is radial, that is, it is constanton equidistants to the boundary. This is the main tool for proving that.
TheoremLet Ω be a smooth (not necessarily analytic) Riemannian manifold.Assume that Ω has the CFP. Then:
∂kη
∂Nk= ck = constant on ∂Ω
for all k = 0, 1, 2, . . . .

We explain the main steps of the proof.
Step 1. The mean curvature is radial.
Define a function η in a neighborhood of ∂Ω as follows:
η(x) = mean curvature of Σx at x
where Σx is the equidistant to the boundary containing x .
In fact, η = ∆ρ where ρ : Ω→ R is the distance function to theboundary.
The aim in the first step is to show that η is radial, that is, it is constanton equidistants to the boundary. This is the main tool for proving that.
TheoremLet Ω be a smooth (not necessarily analytic) Riemannian manifold.Assume that Ω has the CFP. Then:
∂kη
∂Nk= ck = constant on ∂Ω
for all k = 0, 1, 2, . . . .

We explain the main steps of the proof.
Step 1. The mean curvature is radial.
Define a function η in a neighborhood of ∂Ω as follows:
η(x) = mean curvature of Σx at x
where Σx is the equidistant to the boundary containing x .
In fact, η = ∆ρ where ρ : Ω→ R is the distance function to theboundary.
The aim in the first step is to show that η is radial, that is, it is constanton equidistants to the boundary. This is the main tool for proving that.
TheoremLet Ω be a smooth (not necessarily analytic) Riemannian manifold.Assume that Ω has the CFP. Then:
∂kη
∂Nk= ck = constant on ∂Ω
for all k = 0, 1, 2, . . . .

We explain the main steps of the proof.
Step 1. The mean curvature is radial.
Define a function η in a neighborhood of ∂Ω as follows:
η(x) = mean curvature of Σx at x
where Σx is the equidistant to the boundary containing x .
In fact, η = ∆ρ where ρ : Ω→ R is the distance function to theboundary.
The aim in the first step is to show that η is radial, that is, it is constanton equidistants to the boundary. This is the main tool for proving that.
TheoremLet Ω be a smooth (not necessarily analytic) Riemannian manifold.Assume that Ω has the CFP. Then:
∂kη
∂Nk= ck = constant on ∂Ω
for all k = 0, 1, 2, . . . .

Fix a point x on the boundary and the geodesic arc γx(t) starting at xand going in the inner normal direction.
As η is an analytic function, its restriction to γx is also analytic;
the Taylor expansion of this restriction does not depend on the basepoint x (by the previous theorem);
the value of η is the same at all points at fixed distance to the boundary(that is, at the regular points of the normal exponential map). Inparticular:
near the boundary, η depends only on the distance to ∂Ω, hence theequidistants close to the boundary have constant mean curvature.
One could also say that, near the boundary, Ω is isoparametric.
Now we have to show the global result, namely that Ω is isoparametricnot only near the boundary but also at points far from it, and that is atube over a regular submanifold.
Typically, this involves the study of the singularity of the normalexponential map, that is, the study of the cut-locus CutΩ.

Fix a point x on the boundary and the geodesic arc γx(t) starting at xand going in the inner normal direction.
As η is an analytic function, its restriction to γx is also analytic;
the Taylor expansion of this restriction does not depend on the basepoint x (by the previous theorem);
the value of η is the same at all points at fixed distance to the boundary(that is, at the regular points of the normal exponential map). Inparticular:
near the boundary, η depends only on the distance to ∂Ω, hence theequidistants close to the boundary have constant mean curvature.
One could also say that, near the boundary, Ω is isoparametric.
Now we have to show the global result, namely that Ω is isoparametricnot only near the boundary but also at points far from it, and that is atube over a regular submanifold.
Typically, this involves the study of the singularity of the normalexponential map, that is, the study of the cut-locus CutΩ.

Fix a point x on the boundary and the geodesic arc γx(t) starting at xand going in the inner normal direction.
As η is an analytic function, its restriction to γx is also analytic;
the Taylor expansion of this restriction does not depend on the basepoint x (by the previous theorem);
the value of η is the same at all points at fixed distance to the boundary(that is, at the regular points of the normal exponential map). Inparticular:
near the boundary, η depends only on the distance to ∂Ω, hence theequidistants close to the boundary have constant mean curvature.
One could also say that, near the boundary, Ω is isoparametric.
Now we have to show the global result, namely that Ω is isoparametricnot only near the boundary but also at points far from it, and that is atube over a regular submanifold.
Typically, this involves the study of the singularity of the normalexponential map, that is, the study of the cut-locus CutΩ.

Fix a point x on the boundary and the geodesic arc γx(t) starting at xand going in the inner normal direction.
As η is an analytic function, its restriction to γx is also analytic;
the Taylor expansion of this restriction does not depend on the basepoint x (by the previous theorem);
the value of η is the same at all points at fixed distance to the boundary(that is, at the regular points of the normal exponential map). Inparticular:
near the boundary, η depends only on the distance to ∂Ω, hence theequidistants close to the boundary have constant mean curvature.
One could also say that, near the boundary, Ω is isoparametric.
Now we have to show the global result, namely that Ω is isoparametricnot only near the boundary but also at points far from it, and that is atube over a regular submanifold.
Typically, this involves the study of the singularity of the normalexponential map, that is, the study of the cut-locus CutΩ.

Fix a point x on the boundary and the geodesic arc γx(t) starting at xand going in the inner normal direction.
As η is an analytic function, its restriction to γx is also analytic;
the Taylor expansion of this restriction does not depend on the basepoint x (by the previous theorem);
the value of η is the same at all points at fixed distance to the boundary(that is, at the regular points of the normal exponential map). Inparticular:
near the boundary, η depends only on the distance to ∂Ω, hence theequidistants close to the boundary have constant mean curvature.
One could also say that, near the boundary, Ω is isoparametric.
Now we have to show the global result, namely that Ω is isoparametricnot only near the boundary but also at points far from it, and that is atube over a regular submanifold.
Typically, this involves the study of the singularity of the normalexponential map, that is, the study of the cut-locus CutΩ.

Fix a point x on the boundary and the geodesic arc γx(t) starting at xand going in the inner normal direction.
As η is an analytic function, its restriction to γx is also analytic;
the Taylor expansion of this restriction does not depend on the basepoint x (by the previous theorem);
the value of η is the same at all points at fixed distance to the boundary(that is, at the regular points of the normal exponential map). Inparticular:
near the boundary, η depends only on the distance to ∂Ω, hence theequidistants close to the boundary have constant mean curvature.
One could also say that, near the boundary, Ω is isoparametric.
Now we have to show the global result, namely that Ω is isoparametricnot only near the boundary but also at points far from it, and that is atube over a regular submanifold.
Typically, this involves the study of the singularity of the normalexponential map, that is, the study of the cut-locus CutΩ.

Fix a point x on the boundary and the geodesic arc γx(t) starting at xand going in the inner normal direction.
As η is an analytic function, its restriction to γx is also analytic;
the Taylor expansion of this restriction does not depend on the basepoint x (by the previous theorem);
the value of η is the same at all points at fixed distance to the boundary(that is, at the regular points of the normal exponential map). Inparticular:
near the boundary, η depends only on the distance to ∂Ω, hence theequidistants close to the boundary have constant mean curvature.
One could also say that, near the boundary, Ω is isoparametric.
Now we have to show the global result, namely that Ω is isoparametricnot only near the boundary but also at points far from it, and that is atube over a regular submanifold.
Typically, this involves the study of the singularity of the normalexponential map, that is, the study of the cut-locus CutΩ.

Fix a point x on the boundary and the geodesic arc γx(t) starting at xand going in the inner normal direction.
As η is an analytic function, its restriction to γx is also analytic;
the Taylor expansion of this restriction does not depend on the basepoint x (by the previous theorem);
the value of η is the same at all points at fixed distance to the boundary(that is, at the regular points of the normal exponential map). Inparticular:
near the boundary, η depends only on the distance to ∂Ω, hence theequidistants close to the boundary have constant mean curvature.
One could also say that, near the boundary, Ω is isoparametric.
Now we have to show the global result, namely that Ω is isoparametricnot only near the boundary but also at points far from it, and that is atube over a regular submanifold.
Typically, this involves the study of the singularity of the normalexponential map, that is, the study of the cut-locus CutΩ.

The cut-locus
Given x ∈ ∂Ω, consider the geodesic γx : [0, L]→ Ω which starts at xand goes in the unit normal direction:
γx(0) = x , γ′x(0) = N(x).
For small t, γx will minimize distance to ∂Ω, in the sense that
d(γx(t), ∂Ω) = t.
As Ω is bounded, γx cannot measure distance for every t, and there willbe a maximum value c(x) for which this happens.
Hence c(x) is defined as follows:
d(γx(t), ∂Ω) = t if and only if t ∈ [0, c(x)].

The cut-locus
Given x ∈ ∂Ω, consider the geodesic γx : [0, L]→ Ω which starts at xand goes in the unit normal direction:
γx(0) = x , γ′x(0) = N(x).
For small t, γx will minimize distance to ∂Ω, in the sense that
d(γx(t), ∂Ω) = t.
As Ω is bounded, γx cannot measure distance for every t, and there willbe a maximum value c(x) for which this happens.
Hence c(x) is defined as follows:
d(γx(t), ∂Ω) = t if and only if t ∈ [0, c(x)].

The cut-locus
Given x ∈ ∂Ω, consider the geodesic γx : [0, L]→ Ω which starts at xand goes in the unit normal direction:
γx(0) = x , γ′x(0) = N(x).
For small t, γx will minimize distance to ∂Ω, in the sense that
d(γx(t), ∂Ω) = t.
As Ω is bounded, γx cannot measure distance for every t, and there willbe a maximum value c(x) for which this happens.
Hence c(x) is defined as follows:
d(γx(t), ∂Ω) = t if and only if t ∈ [0, c(x)].

The cut-locus
Given x ∈ ∂Ω, consider the geodesic γx : [0, L]→ Ω which starts at xand goes in the unit normal direction:
γx(0) = x , γ′x(0) = N(x).
For small t, γx will minimize distance to ∂Ω, in the sense that
d(γx(t), ∂Ω) = t.
As Ω is bounded, γx cannot measure distance for every t, and there willbe a maximum value c(x) for which this happens.
Hence c(x) is defined as follows:
d(γx(t), ∂Ω) = t if and only if t ∈ [0, c(x)].

c(x) is called the cut-radius at x ∈ ∂Ω and γx(c(x)) is the cut point at x .
The cut-locus is then the union of all cut-points:
CutΩ = γx(c(x)) : x ∈ ∂Ω.
It is known that the cut-locus is a closed subset of Ω, and it has measurezero.
CutΩ is a deformation retract of Ω; the distance function to theboundary is smooth on Ω \ CutΩ.
However, generally speaking, it is far from being a regular subset.

c(x) is called the cut-radius at x ∈ ∂Ω and γx(c(x)) is the cut point at x .
The cut-locus is then the union of all cut-points:
CutΩ = γx(c(x)) : x ∈ ∂Ω.
It is known that the cut-locus is a closed subset of Ω, and it has measurezero.
CutΩ is a deformation retract of Ω; the distance function to theboundary is smooth on Ω \ CutΩ.
However, generally speaking, it is far from being a regular subset.

c(x) is called the cut-radius at x ∈ ∂Ω and γx(c(x)) is the cut point at x .
The cut-locus is then the union of all cut-points:
CutΩ = γx(c(x)) : x ∈ ∂Ω.
It is known that the cut-locus is a closed subset of Ω, and it has measurezero.
CutΩ is a deformation retract of Ω; the distance function to theboundary is smooth on Ω \ CutΩ.
However, generally speaking, it is far from being a regular subset.

c(x) is called the cut-radius at x ∈ ∂Ω and γx(c(x)) is the cut point at x .
The cut-locus is then the union of all cut-points:
CutΩ = γx(c(x)) : x ∈ ∂Ω.
It is known that the cut-locus is a closed subset of Ω, and it has measurezero.
CutΩ is a deformation retract of Ω; the distance function to theboundary is smooth on Ω \ CutΩ.
However, generally speaking, it is far from being a regular subset.

c(x) is called the cut-radius at x ∈ ∂Ω and γx(c(x)) is the cut point at x .
The cut-locus is then the union of all cut-points:
CutΩ = γx(c(x)) : x ∈ ∂Ω.
It is known that the cut-locus is a closed subset of Ω, and it has measurezero.
CutΩ is a deformation retract of Ω; the distance function to theboundary is smooth on Ω \ CutΩ.
However, generally speaking, it is far from being a regular subset.

End of proof
Using the constant flow property one shows that CutΩ coincides with theset of points of Ω which are at (constant) maximum distance to theboundary.
In fact, it can be shown that CutΩ coincides with the critical set of themean-exit time function.
One then verifies that the normal exponential map has locally constantrank, which implies, after some work, that CutΩ is a compact,connected, regular submanifold of Ω.
We now setP = CutΩ.
The equidistants from P coincide with the equidistants to ∂Ω; as thesehave constant mean curvature, we see that Ω is an isoparametric tubeover P, as asserted.

End of proof
Using the constant flow property one shows that CutΩ coincides with theset of points of Ω which are at (constant) maximum distance to theboundary.
In fact, it can be shown that CutΩ coincides with the critical set of themean-exit time function.
One then verifies that the normal exponential map has locally constantrank, which implies, after some work, that CutΩ is a compact,connected, regular submanifold of Ω.
We now setP = CutΩ.
The equidistants from P coincide with the equidistants to ∂Ω; as thesehave constant mean curvature, we see that Ω is an isoparametric tubeover P, as asserted.

End of proof
Using the constant flow property one shows that CutΩ coincides with theset of points of Ω which are at (constant) maximum distance to theboundary.
In fact, it can be shown that CutΩ coincides with the critical set of themean-exit time function.
One then verifies that the normal exponential map has locally constantrank, which implies, after some work, that CutΩ is a compact,connected, regular submanifold of Ω.
We now setP = CutΩ.
The equidistants from P coincide with the equidistants to ∂Ω; as thesehave constant mean curvature, we see that Ω is an isoparametric tubeover P, as asserted.

End of proof
Using the constant flow property one shows that CutΩ coincides with theset of points of Ω which are at (constant) maximum distance to theboundary.
In fact, it can be shown that CutΩ coincides with the critical set of themean-exit time function.
One then verifies that the normal exponential map has locally constantrank, which implies, after some work, that CutΩ is a compact,connected, regular submanifold of Ω.
We now setP = CutΩ.
The equidistants from P coincide with the equidistants to ∂Ω; as thesehave constant mean curvature, we see that Ω is an isoparametric tubeover P, as asserted.

Sketch of proof of the main theorem
We now explain the main arguments for the proof of:
Theorem. Let Ω be a smooth (not necessarily analytic) Riemannianmanifold. Assume that Ω has the CFP. Then:∂kη
∂Nk= ck = constant on ∂Ω for all k = 0, 1, 2, . . . .
The main tool is an asymptotic study of the heat flow.
The heat flow at y ∈ ∂Ω admits an asymptotic expansion for t → 0, oftype:
∂ut
∂N(y) ∼
∞∑k=1
Bk(y) · t k2−1
∼ B1(y) · 1√t
+ B2(y) + B3(y)√
t + . . .
for certain heat flow invariants Bk(y) ∈ C∞(∂Ω).
If Ω has the CFP, then every Bk is constant on ∂Ω.

Sketch of proof of the main theorem
We now explain the main arguments for the proof of:
Theorem. Let Ω be a smooth (not necessarily analytic) Riemannianmanifold. Assume that Ω has the CFP. Then:∂kη
∂Nk= ck = constant on ∂Ω for all k = 0, 1, 2, . . . .
The main tool is an asymptotic study of the heat flow.
The heat flow at y ∈ ∂Ω admits an asymptotic expansion for t → 0, oftype:
∂ut
∂N(y) ∼
∞∑k=1
Bk(y) · t k2−1
∼ B1(y) · 1√t
+ B2(y) + B3(y)√
t + . . .
for certain heat flow invariants Bk(y) ∈ C∞(∂Ω).
If Ω has the CFP, then every Bk is constant on ∂Ω.

Sketch of proof of the main theorem
We now explain the main arguments for the proof of:
Theorem. Let Ω be a smooth (not necessarily analytic) Riemannianmanifold. Assume that Ω has the CFP. Then:∂kη
∂Nk= ck = constant on ∂Ω for all k = 0, 1, 2, . . . .
The main tool is an asymptotic study of the heat flow.
The heat flow at y ∈ ∂Ω admits an asymptotic expansion for t → 0, oftype:
∂ut
∂N(y) ∼
∞∑k=1
Bk(y) · t k2−1
∼ B1(y) · 1√t
+ B2(y) + B3(y)√
t + . . .
for certain heat flow invariants Bk(y) ∈ C∞(∂Ω).
If Ω has the CFP, then every Bk is constant on ∂Ω.

Sketch of proof of the main theorem
We now explain the main arguments for the proof of:
Theorem. Let Ω be a smooth (not necessarily analytic) Riemannianmanifold. Assume that Ω has the CFP. Then:∂kη
∂Nk= ck = constant on ∂Ω for all k = 0, 1, 2, . . . .
The main tool is an asymptotic study of the heat flow.
The heat flow at y ∈ ∂Ω admits an asymptotic expansion for t → 0, oftype:
∂ut
∂N(y) ∼
∞∑k=1
Bk(y) · t k2−1
∼ B1(y) · 1√t
+ B2(y) + B3(y)√
t + . . .
for certain heat flow invariants Bk(y) ∈ C∞(∂Ω).
If Ω has the CFP, then every Bk is constant on ∂Ω.

Sketch of proof of the main theorem
We now explain the main arguments for the proof of:
Theorem. Let Ω be a smooth (not necessarily analytic) Riemannianmanifold. Assume that Ω has the CFP. Then:∂kη
∂Nk= ck = constant on ∂Ω for all k = 0, 1, 2, . . . .
The main tool is an asymptotic study of the heat flow.
The heat flow at y ∈ ∂Ω admits an asymptotic expansion for t → 0, oftype:
∂ut
∂N(y) ∼
∞∑k=1
Bk(y) · t k2−1
∼ B1(y) · 1√t
+ B2(y) + B3(y)√
t + . . .
for certain heat flow invariants Bk(y) ∈ C∞(∂Ω).
If Ω has the CFP, then every Bk is constant on ∂Ω.

Sketch of proof of Theorem 5
The existence of the asymptotic series and the first four invariants werecomputed by van den Berg and Gilkey.
Here they are.
B1 =2√π
B2 = −1
2η
B3 = − 1
6√π
(2tr(RN + S2)− η2
)B4 =
1
16
(ηtr(RN + S2)− tr(∇NRN + 2S RN + 2S3) + ∆∂Ωη
)where RN is the Jacobi operator RN(X ) = R(N,X )N and S is the shapeoperator of ∂Ω relative to the inner unit normal N.
Given that, we see that the CFP property immediately implies somevaluable informations.

Sketch of proof of Theorem 5
The existence of the asymptotic series and the first four invariants werecomputed by van den Berg and Gilkey.
Here they are.
B1 =2√π
B2 = −1
2η
B3 = − 1
6√π
(2tr(RN + S2)− η2
)B4 =
1
16
(ηtr(RN + S2)− tr(∇NRN + 2S RN + 2S3) + ∆∂Ωη
)where RN is the Jacobi operator RN(X ) = R(N,X )N and S is the shapeoperator of ∂Ω relative to the inner unit normal N.
Given that, we see that the CFP property immediately implies somevaluable informations.

Sketch of proof of Theorem 5
The existence of the asymptotic series and the first four invariants werecomputed by van den Berg and Gilkey.
Here they are.
B1 =2√π
B2 = −1
2η
B3 = − 1
6√π
(2tr(RN + S2)− η2
)B4 =
1
16
(ηtr(RN + S2)− tr(∇NRN + 2S RN + 2S3) + ∆∂Ωη
)where RN is the Jacobi operator RN(X ) = R(N,X )N and S is the shapeoperator of ∂Ω relative to the inner unit normal N.
Given that, we see that the CFP property immediately implies somevaluable informations.

Sketch of proof of Theorem 5
The mean curvature must be constant : hence the only Euclidean orhyperbolic domains with the CFP property are balls (Alexandrovtheorem).
If Ω has constant curvature (or more generally it is an Einstein manifold)then the scalar curvature of ∂Ω must be constant.
However, to prove that all the jets of the mean curvature are constant on∂Ω one has to have information about the invariants Bk , for all k.
Moreover it would be desirable to give a different presentation of Bk .
There exists a recursive formula which computes all invariants Bk (S.2004).
Let us describe the outcome and the way the invariants Bk are presented.

Sketch of proof of Theorem 5
The mean curvature must be constant : hence the only Euclidean orhyperbolic domains with the CFP property are balls (Alexandrovtheorem).
If Ω has constant curvature (or more generally it is an Einstein manifold)then the scalar curvature of ∂Ω must be constant.
However, to prove that all the jets of the mean curvature are constant on∂Ω one has to have information about the invariants Bk , for all k.
Moreover it would be desirable to give a different presentation of Bk .
There exists a recursive formula which computes all invariants Bk (S.2004).
Let us describe the outcome and the way the invariants Bk are presented.

Sketch of proof of Theorem 5
The mean curvature must be constant : hence the only Euclidean orhyperbolic domains with the CFP property are balls (Alexandrovtheorem).
If Ω has constant curvature (or more generally it is an Einstein manifold)then the scalar curvature of ∂Ω must be constant.
However, to prove that all the jets of the mean curvature are constant on∂Ω one has to have information about the invariants Bk , for all k.
Moreover it would be desirable to give a different presentation of Bk .
There exists a recursive formula which computes all invariants Bk (S.2004).
Let us describe the outcome and the way the invariants Bk are presented.

Sketch of proof of Theorem 5
The mean curvature must be constant : hence the only Euclidean orhyperbolic domains with the CFP property are balls (Alexandrovtheorem).
If Ω has constant curvature (or more generally it is an Einstein manifold)then the scalar curvature of ∂Ω must be constant.
However, to prove that all the jets of the mean curvature are constant on∂Ω one has to have information about the invariants Bk , for all k.
Moreover it would be desirable to give a different presentation of Bk .
There exists a recursive formula which computes all invariants Bk (S.2004).
Let us describe the outcome and the way the invariants Bk are presented.

Sketch of proof of Theorem 5
The mean curvature must be constant : hence the only Euclidean orhyperbolic domains with the CFP property are balls (Alexandrovtheorem).
If Ω has constant curvature (or more generally it is an Einstein manifold)then the scalar curvature of ∂Ω must be constant.
However, to prove that all the jets of the mean curvature are constant on∂Ω one has to have information about the invariants Bk , for all k.
Moreover it would be desirable to give a different presentation of Bk .
There exists a recursive formula which computes all invariants Bk (S.2004).
Let us describe the outcome and the way the invariants Bk are presented.

Sketch of proof of Theorem 5
The mean curvature must be constant : hence the only Euclidean orhyperbolic domains with the CFP property are balls (Alexandrovtheorem).
If Ω has constant curvature (or more generally it is an Einstein manifold)then the scalar curvature of ∂Ω must be constant.
However, to prove that all the jets of the mean curvature are constant on∂Ω one has to have information about the invariants Bk , for all k.
Moreover it would be desirable to give a different presentation of Bk .
There exists a recursive formula which computes all invariants Bk (S.2004).
Let us describe the outcome and the way the invariants Bk are presented.

Sketch of proof of Theorem 5
On a small tubular neighborhood U of ∂Ω, the distance function ρ issmooth, and then we can define the first order operator:
Nφ = 2〈∇φ,∇ρ〉 − φ∆ρ,
for all φ ∈ C∞(U).
Note that ∇ρ is normal to equidistants and gives rise to a vector field Nwhich, restricted to the boundary, is precisely the unit normal vector.Remark also that ∆ρ = η.
Hence the operator Nφ can also be written:
Nφ = 2∂φ
∂N− ηφ.
In particular:N1 = −η.

Sketch of proof of Theorem 5
On a small tubular neighborhood U of ∂Ω, the distance function ρ issmooth, and then we can define the first order operator:
Nφ = 2〈∇φ,∇ρ〉 − φ∆ρ,
for all φ ∈ C∞(U).
Note that ∇ρ is normal to equidistants and gives rise to a vector field Nwhich, restricted to the boundary, is precisely the unit normal vector.Remark also that ∆ρ = η.
Hence the operator Nφ can also be written:
Nφ = 2∂φ
∂N− ηφ.
In particular:N1 = −η.

Sketch of proof of Theorem 5
On a small tubular neighborhood U of ∂Ω, the distance function ρ issmooth, and then we can define the first order operator:
Nφ = 2〈∇φ,∇ρ〉 − φ∆ρ,
for all φ ∈ C∞(U).
Note that ∇ρ is normal to equidistants and gives rise to a vector field Nwhich, restricted to the boundary, is precisely the unit normal vector.Remark also that ∆ρ = η.
Hence the operator Nφ can also be written:
Nφ = 2∂φ
∂N− ηφ.
In particular:N1 = −η.

Let ∆ be the Laplacian of the ambient manifold Ω. We let A be thealgebra of operators acting on C∞(U) and generated by the operators Nand ∆. Here is the main calculation.
Theorem(S. 2004) For all k = 1, 2, . . . there exists an operator Dk ∈ A (that is, apolynomial in N and ∆ of homogeneous degree k − 1) such that:
Bk = Dk1|∂Ω.
The sequence of operators Dk is explicitly computable by a recursiveformula.

Let ∆ be the Laplacian of the ambient manifold Ω. We let A be thealgebra of operators acting on C∞(U) and generated by the operators Nand ∆. Here is the main calculation.
Theorem(S. 2004) For all k = 1, 2, . . . there exists an operator Dk ∈ A (that is, apolynomial in N and ∆ of homogeneous degree k − 1) such that:
Bk = Dk1|∂Ω.
The sequence of operators Dk is explicitly computable by a recursiveformula.

Here are the first few operators:
D1 =2√π· I
D2 =1
2N
D3 =1
6√π
(N2 − 4∆)
D4 = − 1
16(∆N + 3N∆)
D5 = − 1
240√π
(N4 + 16N2∆ + 8N∆N − 48∆2)
hence we obtain the following presentation of the invariants B1, . . . ,B5:note in fact that N1 = −η etc.

Here are the first few operators:
D1 =2√π· I
D2 =1
2N
D3 =1
6√π
(N2 − 4∆)
D4 = − 1
16(∆N + 3N∆)
D5 = − 1
240√π
(N4 + 16N2∆ + 8N∆N − 48∆2)
hence we obtain the following presentation of the invariants B1, . . . ,B5:note in fact that N1 = −η etc.

In what follows, ∆T∇T , δT will denote the tangential operators (that is,the operators acting on the restriction to each equidistant).
B1 =2√π
B2 =− 1
2η
B3 =1
6√π
(− 2
∂η
∂N+ η2
)B4 =− 1
16
( ∂2η
∂N2− η ∂η
∂N−∆Tη
)B5 =− 1
240√π
(− 20
∂3η
∂N3+ 40η
∂2η
∂N2+ 28
( ∂η∂N
)2
− 20η2 ∂η
∂N+ η4
+ 12∆T (∂η
∂N) + 16|∇Tη|2 + 4δT (S∇Tη)
)
It is now easy to show that, if B1, . . . ,B5 are constant, then η and∂kη
∂Nk
are constant for k ≤ 3.

In what follows, ∆T∇T , δT will denote the tangential operators (that is,the operators acting on the restriction to each equidistant).
B1 =2√π
B2 =− 1
2η
B3 =1
6√π
(− 2
∂η
∂N+ η2
)B4 =− 1
16
( ∂2η
∂N2− η ∂η
∂N−∆Tη
)B5 =− 1
240√π
(− 20
∂3η
∂N3+ 40η
∂2η
∂N2+ 28
( ∂η∂N
)2
− 20η2 ∂η
∂N+ η4
+ 12∆T (∂η
∂N) + 16|∇Tη|2 + 4δT (S∇Tη)
)
It is now easy to show that, if B1, . . . ,B5 are constant, then η and∂kη
∂Nk
are constant for k ≤ 3.

Final iteration
Iterating the above argument and using the recursive formulae one provesthat, for all k ∈ N:
Bk = ck∂k−2η
∂Nk−2+ terms involving normal derivatives of lower order
where ck is a constant.
Important : need to show that ck 6= 0 for all k !
This is a rather involved combinatorial fact, obtained using the algorithmfor the computation of the operators Dk .
Having done that, it follows by induction that:
if all Bk are constant, then all normal derivatives of η are also constant.
This ends the proof.

Final iteration
Iterating the above argument and using the recursive formulae one provesthat, for all k ∈ N:
Bk = ck∂k−2η
∂Nk−2+ terms involving normal derivatives of lower order
where ck is a constant.
Important : need to show that ck 6= 0 for all k !
This is a rather involved combinatorial fact, obtained using the algorithmfor the computation of the operators Dk .
Having done that, it follows by induction that:
if all Bk are constant, then all normal derivatives of η are also constant.
This ends the proof.

Final iteration
Iterating the above argument and using the recursive formulae one provesthat, for all k ∈ N:
Bk = ck∂k−2η
∂Nk−2+ terms involving normal derivatives of lower order
where ck is a constant.
Important : need to show that ck 6= 0 for all k !
This is a rather involved combinatorial fact, obtained using the algorithmfor the computation of the operators Dk .
Having done that, it follows by induction that:
if all Bk are constant, then all normal derivatives of η are also constant.
This ends the proof.

Final iteration
Iterating the above argument and using the recursive formulae one provesthat, for all k ∈ N:
Bk = ck∂k−2η
∂Nk−2+ terms involving normal derivatives of lower order
where ck is a constant.
Important : need to show that ck 6= 0 for all k !
This is a rather involved combinatorial fact, obtained using the algorithmfor the computation of the operators Dk .
Having done that, it follows by induction that:
if all Bk are constant, then all normal derivatives of η are also constant.
This ends the proof.

Final iteration
Iterating the above argument and using the recursive formulae one provesthat, for all k ∈ N:
Bk = ck∂k−2η
∂Nk−2+ terms involving normal derivatives of lower order
where ck is a constant.
Important : need to show that ck 6= 0 for all k !
This is a rather involved combinatorial fact, obtained using the algorithmfor the computation of the operators Dk .
Having done that, it follows by induction that:
if all Bk are constant, then all normal derivatives of η are also constant.
This ends the proof.

Final iteration
Iterating the above argument and using the recursive formulae one provesthat, for all k ∈ N:
Bk = ck∂k−2η
∂Nk−2+ terms involving normal derivatives of lower order
where ck is a constant.
Important : need to show that ck 6= 0 for all k !
This is a rather involved combinatorial fact, obtained using the algorithmfor the computation of the operators Dk .
Having done that, it follows by induction that:
if all Bk are constant, then all normal derivatives of η are also constant.
This ends the proof.

Final remarks
What we said refers to compact manifolds with boundary. The casewhere Ω is not compact is very rich and interesting (see the works ofPacard, Ros and Sicbaldi, etc. ) There are unbounded domains in Rn,not isometric to isoparametric tubes, which supports solutions to theSerrin problem.
There is a big variety of overdetermined problems. For example, peopleconsidered the following Steklov overdetermined problem:
∆u = 0 on Ω
∂u
∂N= −σu, |∇u| = 1 on ∂Ω
Payne and Philippin proved that, if Ω ⊆ R2 supports a solution whenσ = σ2 (first positive Steklov eigenvalue), then Ω must be a ball.
When σ > σ2 there are exotic plane domains supporting solutions(Alessandrini and Magnanini).

Final remarks
What we said refers to compact manifolds with boundary. The casewhere Ω is not compact is very rich and interesting (see the works ofPacard, Ros and Sicbaldi, etc. ) There are unbounded domains in Rn,not isometric to isoparametric tubes, which supports solutions to theSerrin problem.
There is a big variety of overdetermined problems. For example, peopleconsidered the following Steklov overdetermined problem:
∆u = 0 on Ω
∂u
∂N= −σu, |∇u| = 1 on ∂Ω
Payne and Philippin proved that, if Ω ⊆ R2 supports a solution whenσ = σ2 (first positive Steklov eigenvalue), then Ω must be a ball.
When σ > σ2 there are exotic plane domains supporting solutions(Alessandrini and Magnanini).

Final remarks
What we said refers to compact manifolds with boundary. The casewhere Ω is not compact is very rich and interesting (see the works ofPacard, Ros and Sicbaldi, etc. ) There are unbounded domains in Rn,not isometric to isoparametric tubes, which supports solutions to theSerrin problem.
There is a big variety of overdetermined problems. For example, peopleconsidered the following Steklov overdetermined problem:
∆u = 0 on Ω
∂u
∂N= −σu, |∇u| = 1 on ∂Ω
Payne and Philippin proved that, if Ω ⊆ R2 supports a solution whenσ = σ2 (first positive Steklov eigenvalue), then Ω must be a ball.
When σ > σ2 there are exotic plane domains supporting solutions(Alessandrini and Magnanini).