Outlier Robust ICP Minimizing Fractional RMSD - …jeffp/papers/FICP-SGP06.pdf · TrICP 3 0.87 5 16...
1
Stanford dragon: scans at 0° and 48° Stanford bunny: 25% deformation 5° rotation Experiments 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 0.8 1 1.2 1.4 1.6 1.8 2 λ d =2 d =3 1.3 .95 λ model noise Problem 1 [minimize rmsd]: Align data point set to model point set under a set of transformations to minimize ● = rotations, translations, scale, ... ● = matchings from to ● hard to optimize over both and ● susceptible to outliers Outlier Robust ICP Minimizing Fractional RMSD Jeff M. Phillips, Ran Liu, Carlo Tomasi | Department of Computer Science, Duke University Fractional ICP Motivation: Registration with Outliers Registration is often skewed by outliers Outlier detection depends on registration We register point sets and find outliers in one algorithm Theorem: Fractional ICP aligning and always converges to a local minimum of in the space of all transformations , matchings , and fractions of inliers . Proof Sketch: The state only changes at steps 2, 3, and 4. At each step cannot increase. ● Fixing a distance threshold for may not converge. ● Fixing a fraction (TrICP) does not find a local minimum. Funnel of convergence is larger than TrICP, but smaller than ICP. ICP has smaller parameter space. ● TrICP heuristically searches for outside of loop. RMSD(D,M,T,μ)= 1 |D| p∈D ||T (p) - μ(p)|| 2 min T ∈ T μ : D → M RMSD(D,M,T,μ) FRMSD(D,M,f,T,μ)= 1 f λ 1 |D f | p∈D f ||T (p) - μ(p)|| 2 Let be points with smallest residuals Problem 2 [minimize frmsd]: Align data point set to model point set under a set of transformations and fractions to minimize ● minimum near true fraction of outliers min T ∈ T μ : D → M f ∈ [0, 1] FRMSD(D,M,f,T,μ) Distance Functions Occlusion ● partial matches ● scans from different view ● data set has grown Deformation ● changes over time ● comparison of similar objects New Data ● measurement error ● spurious/unrelated data λ time (s) # iter. RMSD FRMSD f 1 0.142 10.38 0.158 0.225 0.701 1.3 0.069 3.81 0.170 0.248 0.749 2 0.059 3.06 0.170 0.303 0.750 3 0.061 3.17 0.170 0.404 0.750 4 0.062 3.21 0.171 0.538 0.751 5 0.063 3.30 0.172 0.717 0.751 Optimal value of depends on noise of model & fraction of inliers (weakly) so that aligned points are more likely inliers than outliers ● is robust for ● FICP has larger radius of convergence with λ =1.3 for R 2 λ = .95 for R 3 λ ∈ [1, 5] λ =3 λ model data ICP FICP time (s) 16.5 # iter. 17.3 RMSD 0.0052 FRMSD 0.0124 f 0.750 time (s) 60.1 # iter. 78.8 RMSD 0.6668 FRMSD 0.6668 f 1.0 ICP FICP Algo. λ 5 ◦ 10 ◦ 25 ◦ 50 ◦ ICP - 0.999 0.997 0.994 0.962 TrICP 3 0.875 0.870 0.853 0.816 FICP 3 0.952 0.945 0.909 0.875 FICP 1.3 0.857 0.473 0.141 0.060 rotation D M FRMSD T {D → M } FRMSD(D,M,f,T,μ) (f,T,μ) f f [0, 1] FRMSD D M T T μ D M T μ D M T D f f |D| p ∈ D ||p - μ(p)||. μ repeat 1. Compute closest points: 2. Compute transformation: to minimize 3. Compute matching: to minimize 4. Compute fraction: to minimize until ( and ) T i ∈ T RMSD(D f ,M,T i ,μ i-1 ) f |D| D f μ i ∈ D → M f i ∈ [0, 1] f i = f i-1 μ i = μ i-1 RMSD(D,M,T i ,μ i ) FRMSD(D,M,f i ,T i ,μ i )
Transcript of Outlier Robust ICP Minimizing Fractional RMSD - …jeffp/papers/FICP-SGP06.pdf · TrICP 3 0.87 5 16...
Stanford dragon: scans at 0° and 48°
Stanford bunny:25% deformation
5° rotation
Experiments
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.8
1
1.2
1.4
1.6
1.8
2
2.2
!/!max
"
d = 2
d = 3
1.3
.95
!
model noise
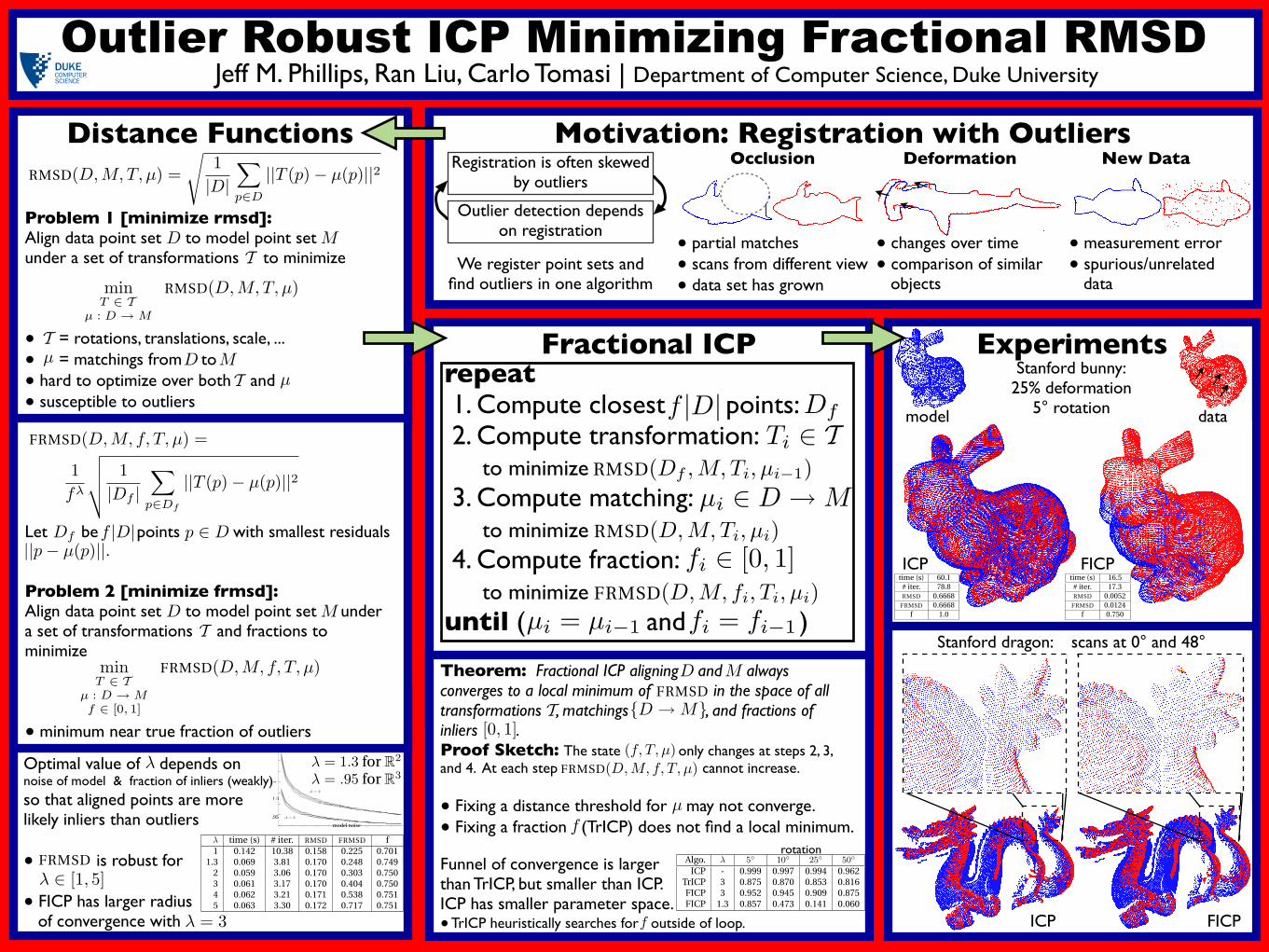
Problem 1 [minimize rmsd]:Align data point set to model point set under a set of transformations to minimize
● = rotations, translations, scale, ...● = matchings from to ● hard to optimize over both and ● susceptible to outliers
Outlier Robust ICP Minimizing Fractional RMSD Jeff M. Phillips, Ran Liu, Carlo Tomasi | Department of Computer Science, Duke University
Fractional ICP
Motivation: Registration with OutliersRegistration is often skewed
by outliers
Outlier detection depends on registration
We register point sets and find outliers in one algorithm
Theorem: Fractional ICP aligning and always converges to a local minimum of in the space of all transformations , matchings , and fractions of inliers .Proof Sketch: The state only changes at steps 2, 3, and 4. At each step cannot increase.
● Fixing a distance threshold for may not converge.● Fixing a fraction (TrICP) does not find a local minimum.
Funnel of convergence is largerthan TrICP, but smaller than ICP.ICP has smaller parameter space.● TrICP heuristically searches for outside of loop.
RMSD(D,M, T, µ) =
!
1
|D|
"
p!D
||T (p) ! µ(p)||2
minT ! T
µ : D " M
RMSD(D,M, T, µ)
FRMSD(D,M, f, T, µ) =
1
f!
!
"
"
#
1
|Df |
$
p!Df
||T (p) ! µ(p)||2
Let be points with smallest residuals
Problem 2 [minimize frmsd]:Align data point set to model point set under a set of transformations and fractions to minimize
● minimum near true fraction of outliers
minT ! T
µ : D " Mf ! [0, 1]
FRMSD(D,M, f, T, µ)
Distance FunctionsOcclusion
● partial matches● scans from different view● data set has grown
Deformation
● changes over time● comparison of similar objects
New Data
● measurement error● spurious/unrelated data
! time (s) # iter. RMSD FRMSD f
1 0.142 10.38 0.158 0.225 0.701
1.3 0.069 3.81 0.170 0.248 0.749
2 0.059 3.06 0.170 0.303 0.750
3 0.061 3.17 0.170 0.404 0.750
4 0.062 3.21 0.171 0.538 0.751
5 0.063 3.30 0.172 0.717 0.751
Optimal value of depends onnoise of model & fraction of inliers (weakly)
so that aligned points are more likely inliers than outliers
● is robust for ● FICP has larger radius of convergence with
! = 1.3 for R2
! = .95 for R3
! ! [1, 5]
! = 3
!
model data
ICP FICPtime (s) 16.5
# iter. 17.3
RMSD 0.0052
FRMSD 0.0124
f 0.750
time (s) 60.1
# iter. 78.8
RMSD 0.6668
FRMSD 0.6668
f 1.0
ICP FICP
Algo. ! 5! 10! 25! 50!
ICP - 0.999 0.997 0.994 0.962TrICP 3 0.875 0.870 0.853 0.816FICP 3 0.952 0.945 0.909 0.875FICP 1.3 0.857 0.473 0.141 0.060
rotation
D M
FRMSD
T {D ! M}
FRMSD(D,M, f, T, µ)(f, T, µ)
f
f
[0, 1]
FRMSD
D M
T
T
µ D M
T µ
D M
T
Df f |D| p ! D||p ! µ(p)||.
µ
repeat 1. Compute closest points: 2. Compute transformation: to minimize 3. Compute matching: to minimize 4. Compute fraction: to minimizeuntil ( and )
Ti ! T
RMSD(Df ,M, Ti, µi!1)
f |D| Df
µi ! D " M
fi ! [0, 1]
fi = fi!1µi = µi!1
RMSD(D,M, Ti, µi)
FRMSD(D,M, fi, Ti, µi)