Optimal Proposal Density - meteo.fr · Overview. Simplest particle lter requires very large...
24
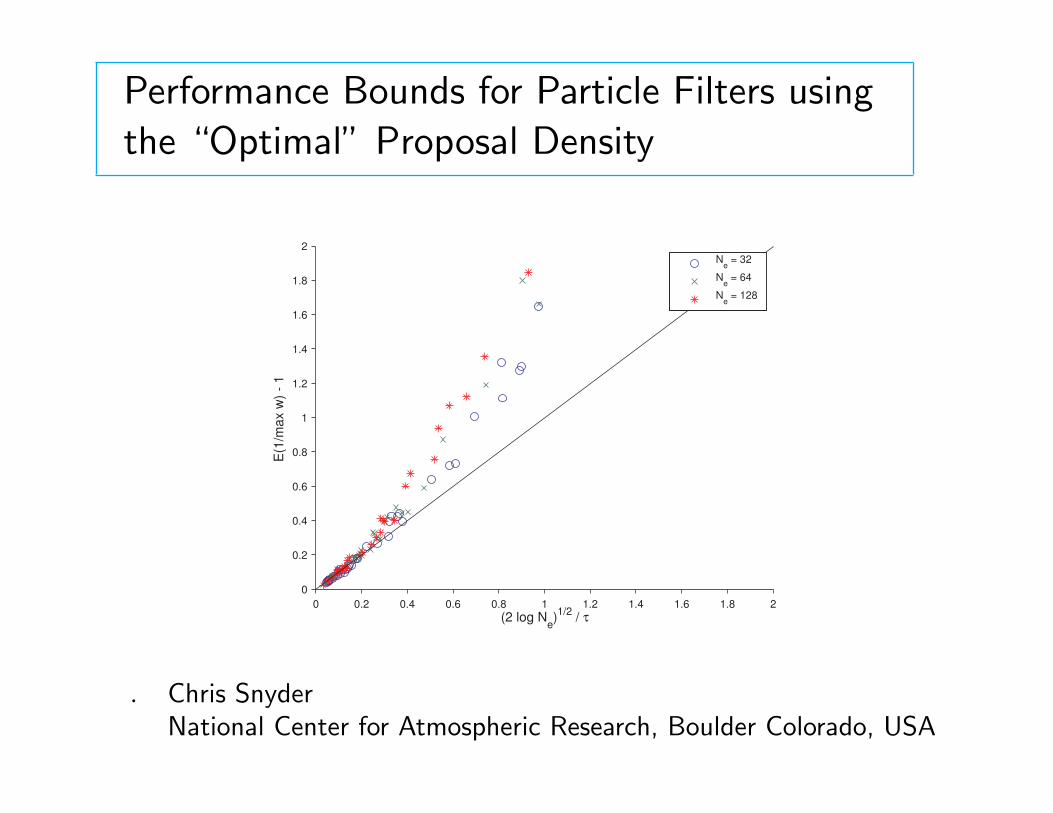
Performance Bounds for Particle Filters using the “Optimal” Proposal Density 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 (2 log N e ) 1/2 / τ E(1/max w) - 1 N e = 32 N e = 64 N e = 128 . Chris Snyder National Center for Atmospheric Research, Boulder Colorado, USA
Transcript of Optimal Proposal Density - meteo.fr · Overview. Simplest particle lter requires very large...
Performance Bounds for Particle Filters using
the “Optimal” Proposal Density
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
(2 log Ne)1/2
/ τ
E(1
/ma
x w
) -
1
N
e = 32
Ne = 64
Ne = 128
. Chris SnyderNational Center for Atmospheric Research, Boulder Colorado, USA
1
Overview
. Simplest particle filter requires very large ensemble size, growingexponentially with the problem size.
. Can the use of the optimal proposal density fix this?
2
Preliminaries
Notation
. follow Ide et al. (1997) generally, except:. . . dim(x) = Nx, dim(y) = Ny, ensemble size = Ne
. . . superscripts index ensemble members
. ∼ means “distributed as,” e.g. x ∼ N(0, 1). Also used for“asymptotic to”
. state evolution: xk =M(xk−1) + ηk
. observations: yk = H(xk) + εk
Interchangeable terms
. particles ≡ ensemble members
. sample ≡ ensemble
3
Preliminaries: The Simplest Particle Filter
. begin with members xik−1 and weights wik−1 that “represent”
p(xk−1|yok−1)
. compute xik by evolving each member to tk under the system dynamics
. re-weight, given new obs yok: wik ∝ wi
k−1p(yok|xik)
. (resample)
4
Preliminaries: Sequential Importance Sampling
Basic idea
. suppose p(x) is hard to sample from, but π(x) is not.
. draw {xi} from π(x) and approximate
p(x) ≈Ne∑i=1
wiδ(x− xi), where wi ∝ p(xi)/π(xi)
. π(x) is the proposal density
5
Preliminaries: SIS (cont.)
Perform importance sampling sequentially in time
. Given {xik−1} from π(xk−1), wish to sample from p(xk, xk−1|yok)
. choose proposal of the form
π(xk, xk−1|yok) = π(xk|xk−1, yok)π(xk−1)
. update weights using
wik ∝
p(xik, xik−1|yok)
π(xik, xik−1|yok)
=p(yok|xik)p(xik|xik−1)
π(xik|xik−1, yok)
wik−1
6
Preliminaries: SIS (cont.)
PF literature shows that choice of proposal is crucial
Standard proposal: transition density from dynamics
. π(xk, xk−1|yok) = p(xk|xk−1)
. wik ∝ p(yok|xik)
. members at tk generated by evolution under system dynamics,as in EF
7
Preliminaries: SIS (cont.)
“Optimal” proposal: Also condition on most recent obs
. π(xk, xk−1|yok) = p(xk|xk−1, yok)
. wik ∝ p(yok|xik−1)
. members at tk generated, in a sense, by DA
. optimal in sense that it minimizes variance of weights over xik
. several recent PF studies use proposals that either reduce to or arerelated to the optimal proposal (van Leeuwen 2010, Morzfeld et al.2011, Papadakis et al. 2010)
8
Degeneracy of PF Weights
. degeneracy ≡ maxiwik → 1
. common problem, well known in PF literature
. for standard proposal, Bengtsson et al. (2008) and Snyder et al.(2008) show Ne must increase exponentially as problem size increasesin order to avoid degeneracy
. What happens with optimal proposal?
9
A Simple Test Problem
Consider the system
xk = axk−1 + ηk−1, yk = xk + εk
where ηk−1 ∼ N(0, q2I) and εk ∼ N(0, I).
For standard proposal:
yk|xk ∼ N(xk, I), wik ∝ exp
(−12|yk − xik|2
)For optimal proposal:
yk|xk−1 ∼ N(axk−1,
(1 + q2
)I), wi
k ∝ exp
(−|yk − axik−1|2
2 (1 + q2)
)
10
A Simple Test Problem (cont.)
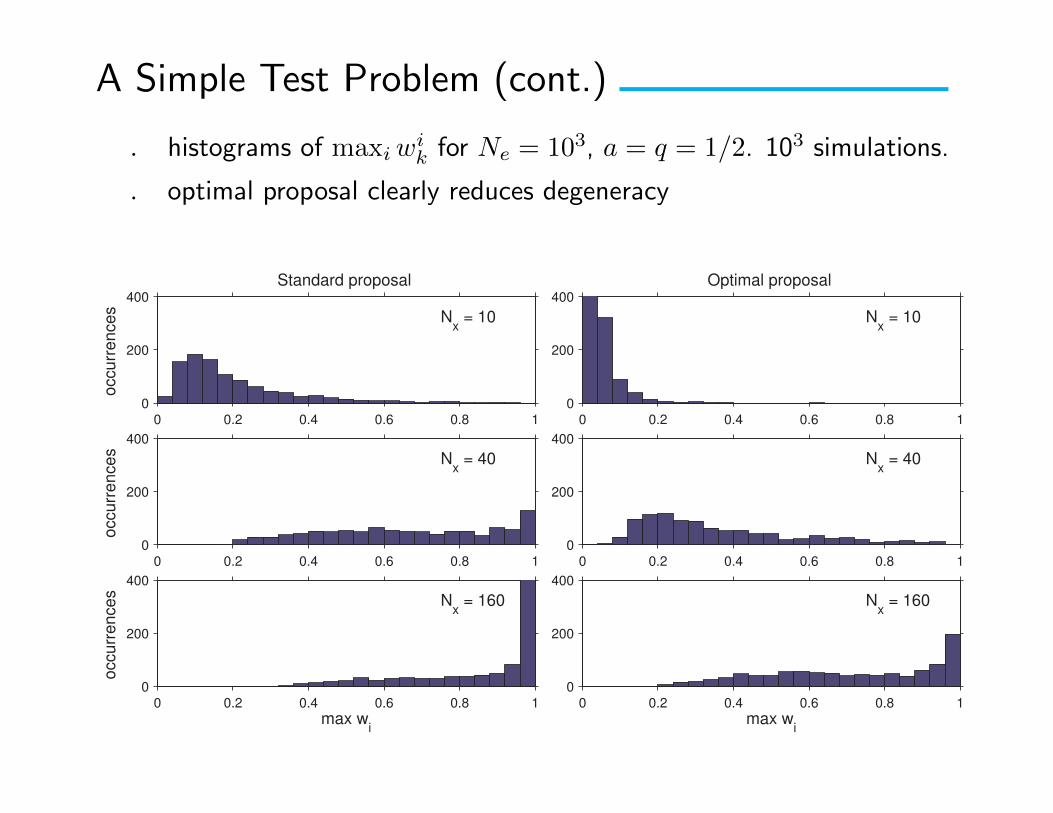
. histograms of maxiwik for Ne = 103, a = q = 1/2. 103 simulations.
. optimal proposal clearly reduces degeneracy
0 0.2 0.4 0.6 0.8 10
200
400
max wi
occurr
ences N
x = 160
0 0.2 0.4 0.6 0.8 10
200
400
max wi
Nx = 160
0 0.2 0.4 0.6 0.8 10
200
400
occurr
ences N
x = 40
0 0.2 0.4 0.6 0.8 10
200
400
Nx = 40
0 0.2 0.4 0.6 0.8 10
200
400
occurr
ences N
x = 10
Standard proposal
0 0.2 0.4 0.6 0.8 10
200
400
Nx = 10
Optimal proposal
11
Behavior of Weights
Define
V (xk, xk−1, yk) = − log(wk/wk−1) =
{− log p(yk|xk), std. proposal− log p(yk|xk−1), opt. proposal
Interested in V as random variable with yk known and xk and xk−1
distributed according to the proposal distribution at tk and tk−1, respectively.
Suppose each component of obs error is independent.
. p(yk|xk), p(yk|xk−1) can be written as products
. V becomes a sum over log likelihoods for each component
. if terms in sum are nearly independent, V → Gaussian as Ny →∞
. infer asymptotic behavior of maxwik from known asymptotics for
sample min of Gaussian
12
Behavior of Weights (cont.)
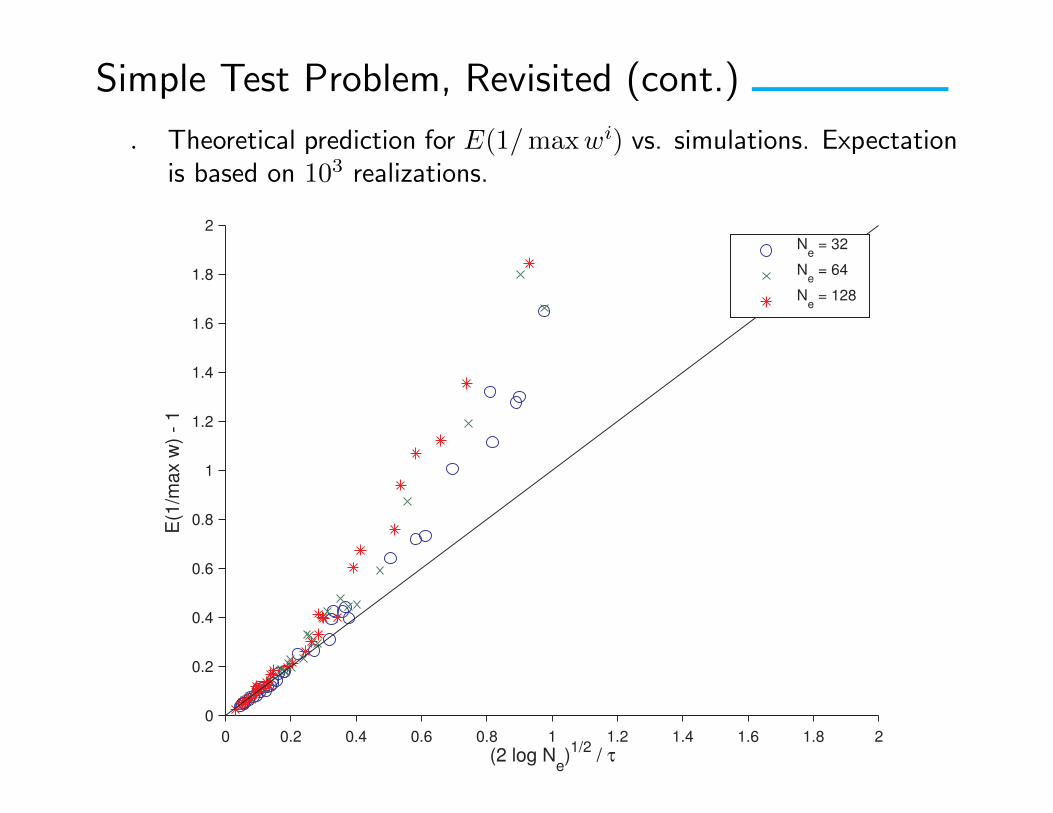
Let τ2 = var(V ). Then for large Ne and large τ ,
E(1/maxwik) ∼ 1 +
√2 logNe
τ
(Bengtsson et al. 2008, Snyder et al. 2008)
As τ2 increases, Ne must increase as exp(2τ2) to keep E(1/maxwi) fixed.
13
The Linear, Gaussian Case
Analytic results possible for linear, Gaussian case with general R = cov(εk),Q = cov(ηk) and Pk = cov(xk).
Proceed by transformation in obs space that simultaneously diagonalizeseither R and HPkH
T , or R+HQHT and HMPk−1(HM)T .
Then
τ2 =
Ny∑j=1
λ2j (λ2j/2 + y2k,j),
where λ2j are eigenvalues of
A =
{R−1/2HPkH
TR−1/2, std. proposal
(HQHT + R)−1/2HMPk−1(HM)T (HQHT + R)−1/2, opt. proposal.
14
Simple Test Problem, Revisited
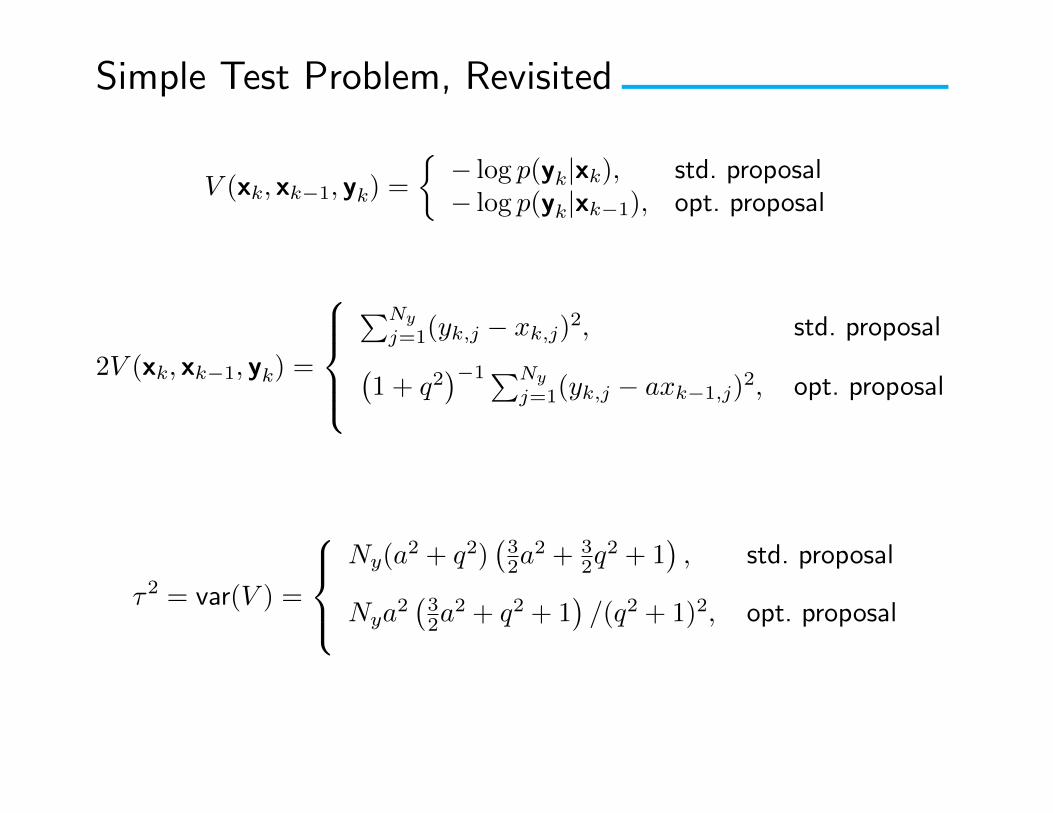
V (xk, xk−1, yk) =
{− log p(yk|xk), std. proposal− log p(yk|xk−1), opt. proposal
2V (xk, xk−1, yk) =
∑Ny
j=1(yk,j − xk,j)2, std. proposal(1 + q2
)−1∑Ny
j=1(yk,j − axk−1,j)2, opt. proposal
τ2 = var(V ) =
Ny(a
2 + q2)(32a
2 + 32q
2 + 1), std. proposal
Nya2(32a
2 + q2 + 1)/(q2 + 1)2, opt. proposal
15
Simple Test Problem, Revisited (cont.)
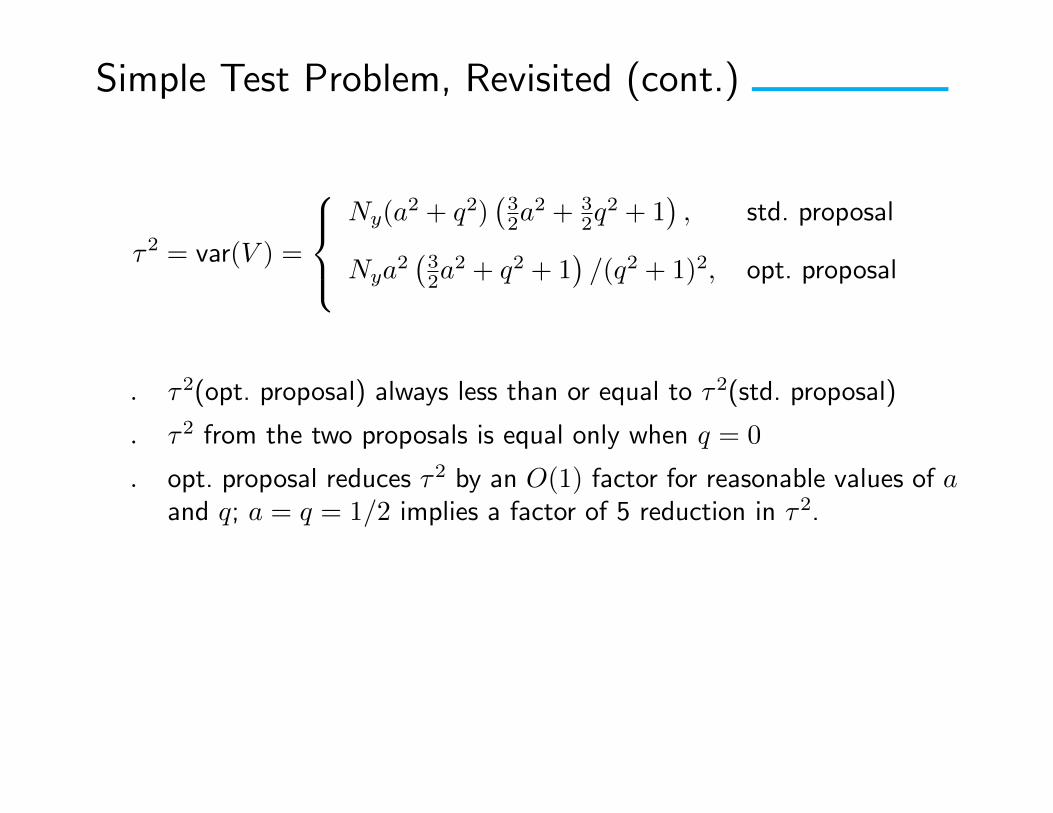
τ2 = var(V ) =
Ny(a
2 + q2)(32a
2 + 32q
2 + 1), std. proposal
Nya2(32a
2 + q2 + 1)/(q2 + 1)2, opt. proposal
. τ2(opt. proposal) always less than or equal to τ2(std. proposal)
. τ2 from the two proposals is equal only when q = 0
. opt. proposal reduces τ2 by an O(1) factor for reasonable values of aand q; a = q = 1/2 implies a factor of 5 reduction in τ2.
16
Simple Test Problem, Revisited (cont.)
. Theoretical prediction for E(1/maxwi) vs. simulations. Expectationis based on 103 realizations.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
(2 log Ne)1/2
/ τ
E(1
/ma
x w
) -
1
N
e = 32
Ne = 64
Ne = 128
17
Simple Test Problem, Revisited (cont.)
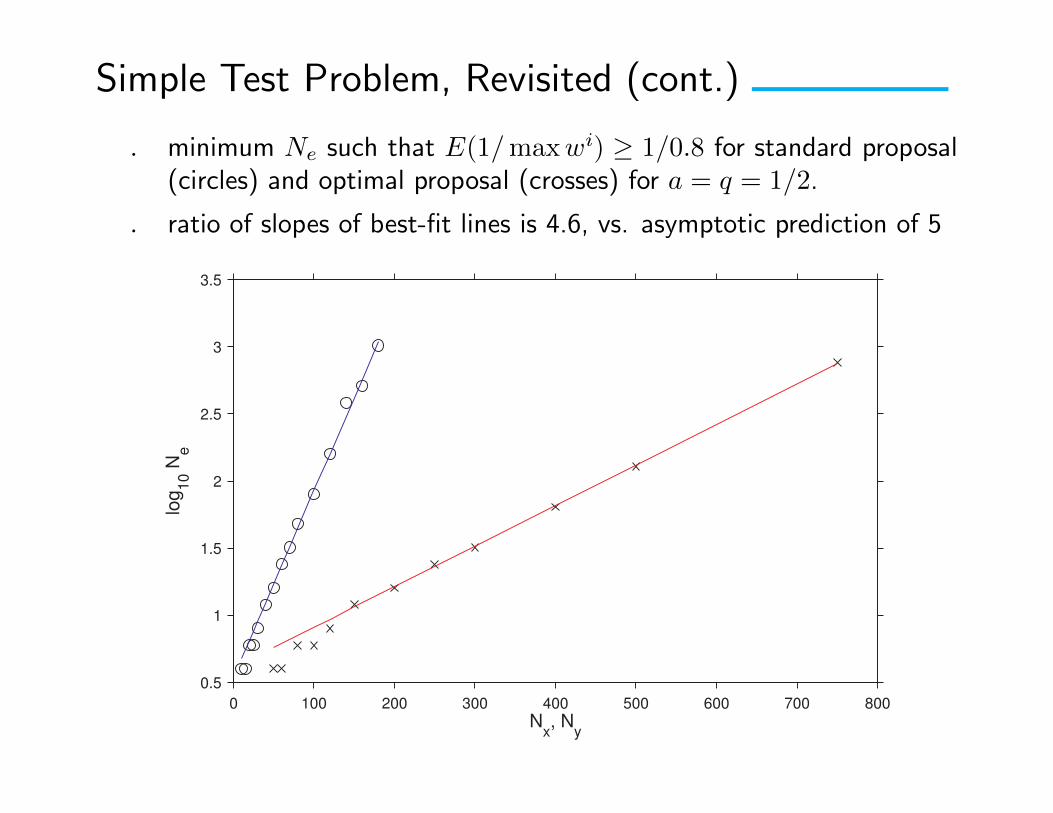
. minimum Ne such that E(1/maxwi) ≥ 1/0.8 for standard proposal(circles) and optimal proposal (crosses) for a = q = 1/2.
. ratio of slopes of best-fit lines is 4.6, vs. asymptotic prediction of 5
0 100 200 300 400 500 600 700 800
0.5
1
1.5
2
2.5
3
3.5
Nx, N
y
log
10 N
e
18
Ny, Nx and Problem Size
τ2 = var(log likelihood) measures “problem size” for PF
. as τ2 increases, Ne must increase as exp(2τ2) if E(1/maxwi) fixed.
Related to obs-space dimension
. in simple example, τ2 ∝ Ny
. given by sum over e-values of obs-space covariance in general linear,Gaussian case—like an effective dimension
Analogy of τ2 to dimension is incomplete
. τ2 depends on obs-error statistics, increasing as R decreases
. τ2 depends on proposal
19
Ny, Nx and Problem Size (cont.)
τ2 depends explicitly only on obs-space quantities
How does Nx affect weight degeneracy?
. asymptotic relation of τ2 and E(1/maxwi) requires V (xk, xk−1, yk)to be ∼ Gaussian over xk
. ∼ Gaussianity of V (xk) only if Nx = dim(x) is large and componentsof x are sufficiently independent
20
Ny, Nx and Problem Size (cont.)
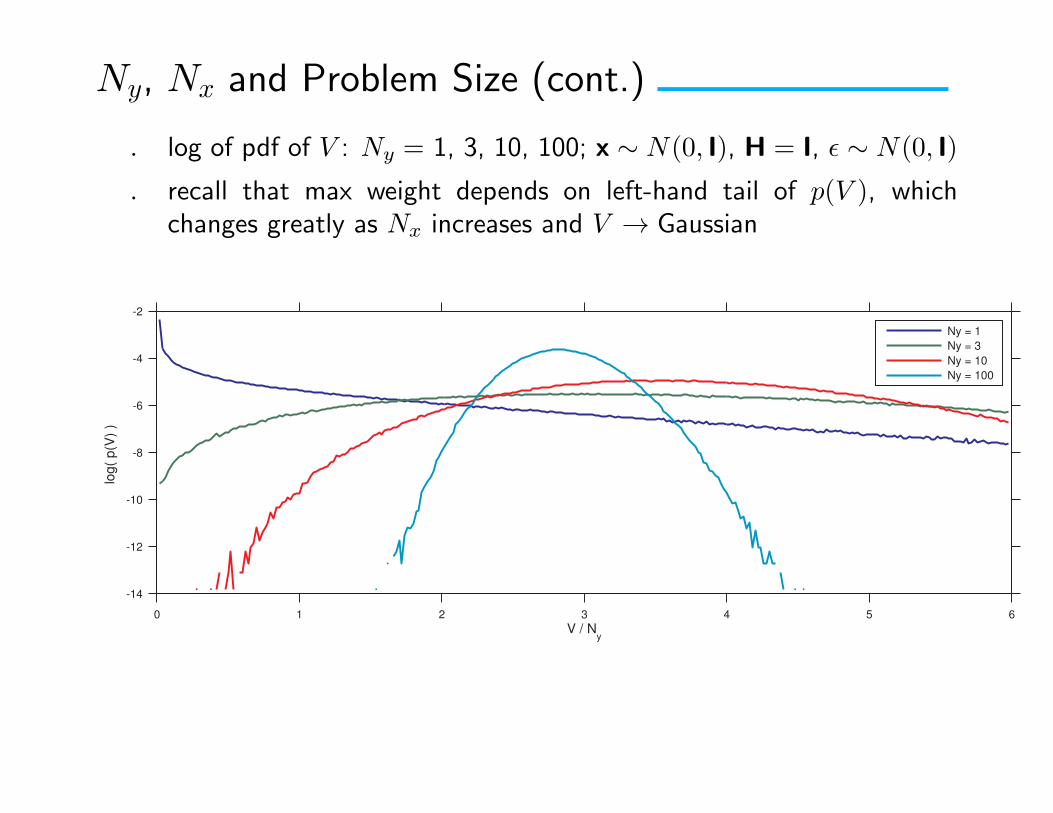
. log of pdf of V : Ny = 1, 3, 10, 100; x ∼ N(0, I), H = I, ε ∼ N(0, I)
. recall that max weight depends on left-hand tail of p(V ), whichchanges greatly as Nx increases and V → Gaussian
0 1 2 3 4 5 6
-14
-12
-10
-8
-6
-4
-2
V / Ny
log(
p(V
) )
Ny = 1
Ny = 3
Ny = 10
Ny = 100
21
Summary
. As was the case for the standard proposal, the optimal proposalrequires Ne to increase exponentially with the “problem size” toavoid degeneracy.
. Exponential rate of increase is quantitatively smaller for the optimalproposal; necessary ensemble size may therefore be much smaller ina given problem.
. Benefits of optimal proposal dependent on magnitude of system noise.
. (In some cases, possible to enhance performance of optimal proposalby artificially increasing system noise in forecast model used infiltering.)
22
Recommendation
New PF algorithms intended for high-dimensional systems should beevaluated first on the simple test problem given here.
23
References
Bengtsson, T., P. Bickel and B. Li, 2008: Curse-of-dimensionality revisited: Collapse of the particle filter invery large scale systems. IMS Collections, 2, 316–334. doi: 10.1214/193940307000000518.
Morzfeld, M., X. Tu, E. Atkins and A. J. Chorin, 2011: A random map implementation of implicit filters. J.
Comput. Phys. 231, 2049–2066.
van Leeuwen, P. J., 2010: Nonlinear data assimilation in geosciences: an extremely efficient particle filter.Quart. J. Roy. Meteor. Soc. 136, 1991–1999.
Papadakis, N., E. Memin, A. Cuzol and N. Gengembre, 2010: Data assimilation with the weighted ensembleKalman filter. Tellus 62A, 673–697.
Snyder, C., T. Bengtsson, P. Bickel and J. Anderson, 2008: Obstacles to high-dimensional particle filtering.Monthly Wea. Rev., 136, 4629–4640.
24