On Magnus integrators for time-dependent Schr odinger ... · error bounds for implicit integrators...
22
On Magnus integrators for time-dependent Schr¨ odinger equations Marlis Hochbruck, University of D¨ usseldorf, Germany Christian Lubich, University of T¨ ubingen, Germany FoCM conference, August 2002
Transcript of On Magnus integrators for time-dependent Schr odinger ... · error bounds for implicit integrators...
On Magnus integrators for time-dependentSchrodinger equations
Marlis Hochbruck, University of Dusseldorf, Germany
Christian Lubich, University of Tubingen, Germany
FoCM conference, August 2002
Outline
• Time dependent Schrodinger equations
i dψdt = H(t)ψ, ψ(t0) = ψ0
• Magnus integrators
• Error bounds for Magnus integrators of order 2 and 4
• Sketch of general procedure for deriving these bounds
• Numerical experiment
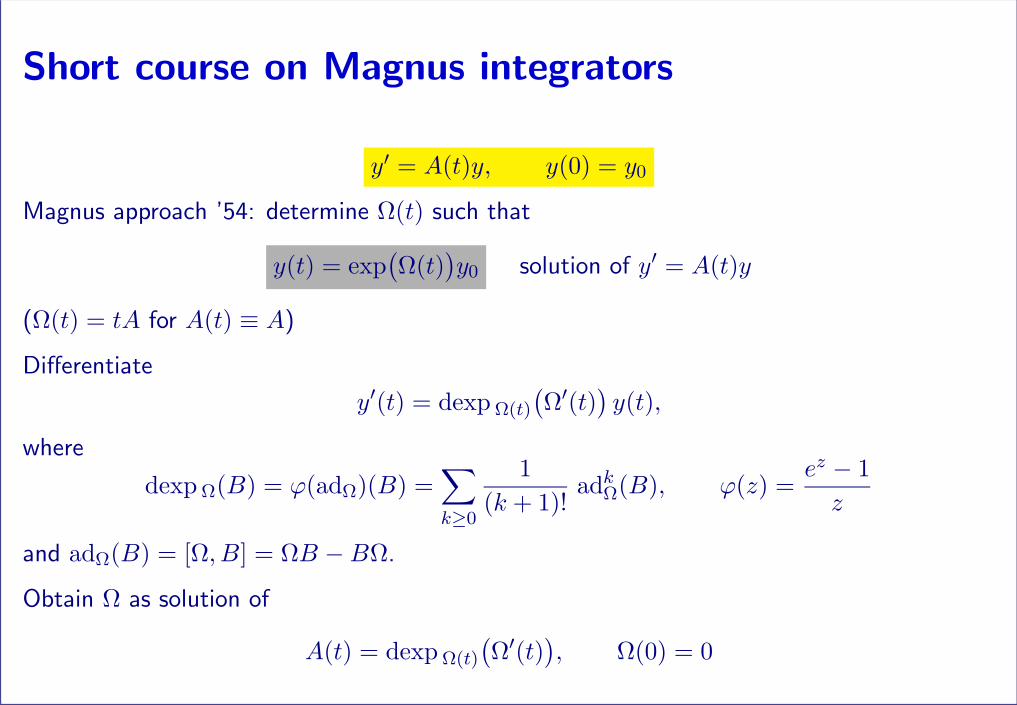
Short course on Magnus integrators
y′ = A(t)y, y(0) = y0
Magnus approach ’54: determine Ω(t) such that
y(t) = exp(Ω(t)
)y0 solution of y′ = A(t)y
(Ω(t) = tA for A(t) ≡ A)
Differentiate
y′(t) = dexp Ω(t)
(Ω′(t)
)y(t),
where
dexp Ω(B) = ϕ(adΩ)(B) =∑k≥0
1(k + 1)!
adkΩ(B), ϕ(z) =ez − 1z
and adΩ(B) = [Ω, B] = ΩB −BΩ.
Obtain Ω as solution of
A(t) = dexp Ω(t)
(Ω′(t)
), Ω(0) = 0
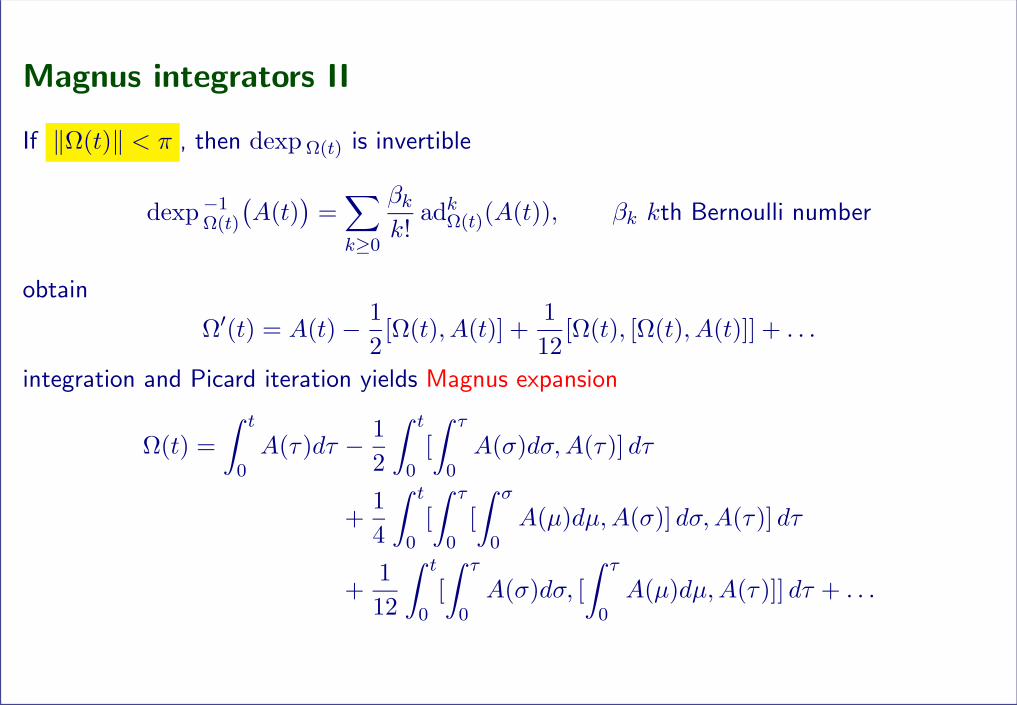
Magnus integrators II
If ‖Ω(t)‖ < π , then dexp Ω(t) is invertible
dexp−1Ω(t)
(A(t)
)=∑k≥0
βkk!
adkΩ(t)(A(t)), βk kth Bernoulli number
obtain
Ω′(t) = A(t)− 12
[Ω(t), A(t)] +112
[Ω(t), [Ω(t), A(t)]] + . . .
integration and Picard iteration yields Magnus expansion
Ω(t) =∫ t
0A(τ)dτ − 1
2
∫ t
0[∫ τ
0A(σ)dσ,A(τ)] dτ
+14
∫ t
0[∫ τ
0[∫ σ
0A(µ)dµ,A(σ)] dσ,A(τ)] dτ
+112
∫ t
0[∫ τ
0A(σ)dσ, [
∫ τ
0A(µ)dµ,A(τ)]] dτ + . . .
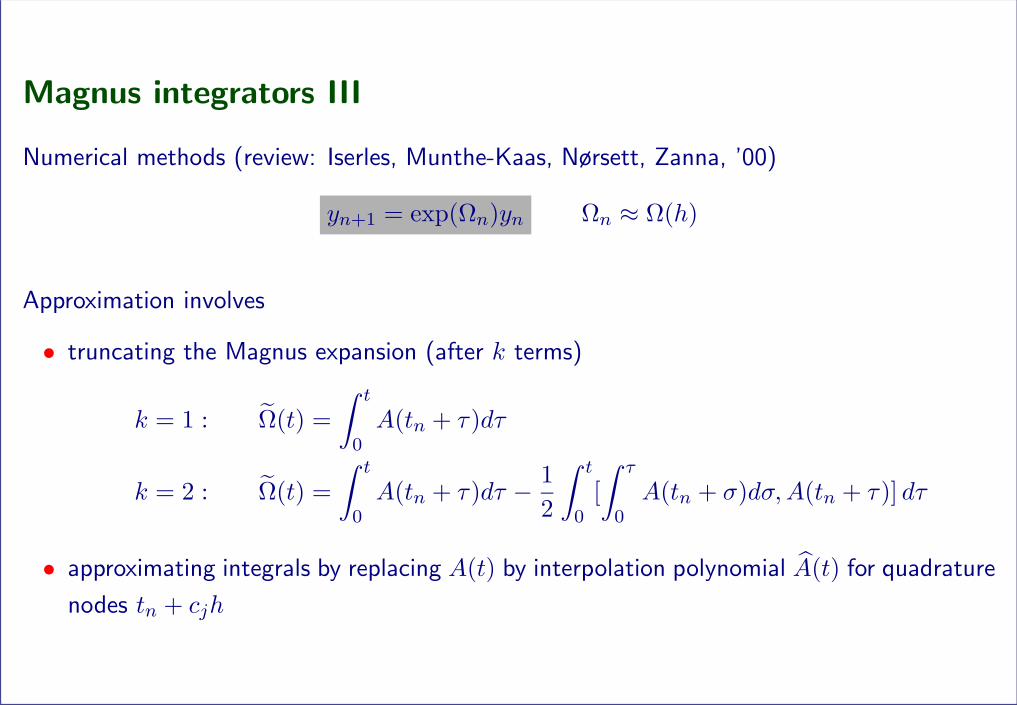
Magnus integrators III
Numerical methods (review: Iserles, Munthe-Kaas, Nørsett, Zanna, ’00)
yn+1 = exp(Ωn)yn Ωn ≈ Ω(h)
Approximation involves
• truncating the Magnus expansion (after k terms)
k = 1 : Ω(t) =∫ t
0A(tn + τ)dτ
k = 2 : Ω(t) =∫ t
0A(tn + τ)dτ − 1
2
∫ t
0[∫ τ
0A(tn + σ)dσ,A(tn + τ)] dτ
• approximating integrals by replacing A(t) by interpolation polynomial A(t) for quadrature
nodes tn + cjh
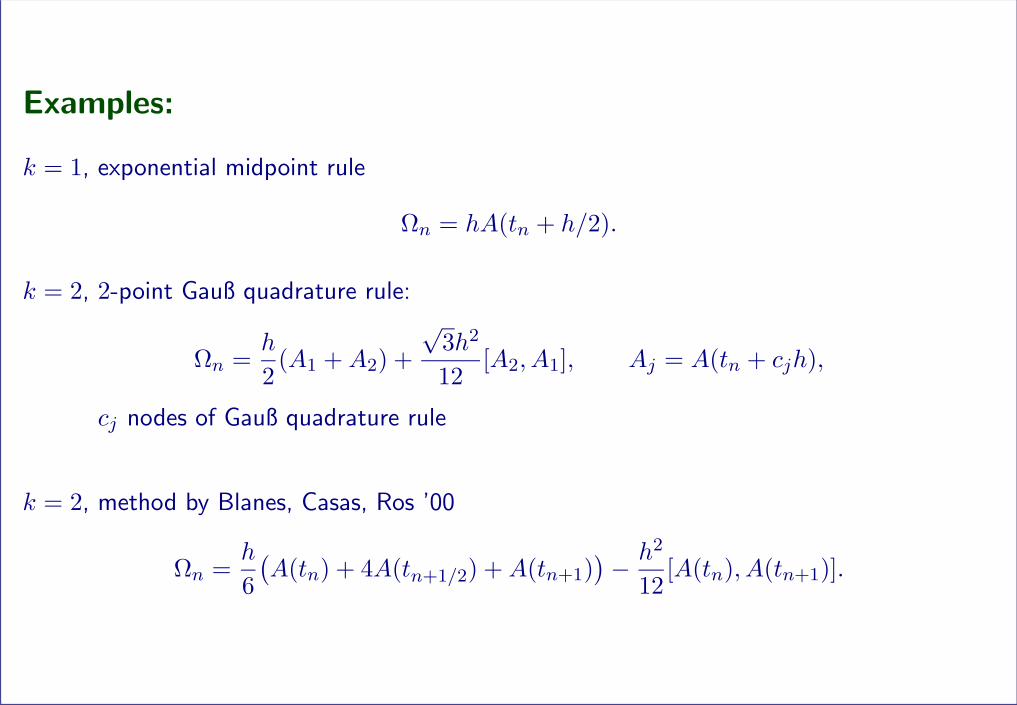
Examples:
k = 1, exponential midpoint rule
Ωn = hA(tn + h/2).
k = 2, 2-point Gauß quadrature rule:
Ωn =h
2(A1 +A2) +
√3h2
12[A2, A1], Aj = A(tn + cjh),
cj nodes of Gauß quadrature rule
k = 2, method by Blanes, Casas, Ros ’00
Ωn =h
6(A(tn) + 4A(tn+1/2) +A(tn+1)
)− h2
12[A(tn), A(tn+1)].
Implementation issues
options for computing exp(Ω)y:
• splitting methods
• Chebyshev approximation
• Lanczos process
Situation
• Magnus integrators efficient for problems like Schrodinger equations
(Tal Ezer, Kosloff, ’92; Blanes, Moan, ’00)
• error behavior well understood for ‖A(t)‖ moderate
(Iserles, Nørsett, ’99; Iserles, Munthe-Kaas, Nørsett, Zanna ’00)
• no results for h ‖A(t)‖ 1
Problems for large h‖A(t)‖• dexp Ω need not be invertible
• Magnus expansion need not converge
• known results on order of Magnus integrators valid for h‖A(t)‖ → 0(Iserles, Nørsett, ’99)
– constants involve ‖A(t)‖
– obtained by studying remainder of Magnus series
Practice: Magnus integrators work extremely well even for h‖A(t)‖ π
WHY?
General assumptions
A(t) = −iH(t) = −i(U + V (t)
)where U s.p.d., V (t) hermitian satisfying∥∥∥ dm
dtmV (t)
∥∥∥ ≤Mm, m = 0, 1, 2, . . .
but no bound on ‖U‖!
define
D = U1/2
typical situation:
U = −∆ + I, V bounded multiplication operator
continuous case: (Q cube, periodic boundary conditions)
‖Dv‖2 =∫Q|∇v|2dx+
∫Qv2dx
‖Dv‖ is H1 Sobolev norm
‖Dy(t)‖ is essentially the kinetic energy of the solution (bounded a priori)
discrete case, minimal grid spacing ∆x:
‖U‖ ∼ ∆x−2, ‖D‖ ∼ ∆x−1
Exponential midpoint rule
Theorem (H., Lubich ’02)
If the solution y satisfies the finite energy condition
y(t)∗H(t)y(t) ≤ K,
then the error of exponential midpoint rule is bounded by
‖yn − y(tn)‖ ≤ Ch2 tn max0≤t≤tn
‖Dy(t)‖
where C = C(Mm,K), m ≤ 2
Error bound for classical implicit midpoint rule:
‖yn − y(tn)‖ ≤ Ch2 tn max0≤t≤tn
‖ d3
dt3y(t)‖
Fourth order Magnus methods – assumptions
commutator bounds:
for a method of order p containing products of A(tn + cjh) with r terms we need
‖[A(τk), [. . . , [A(τ1),dm
dtmV (τ0)]] . . .]v‖ ≤ K ‖Dkv‖
0 ≤ m ≤ p,
k + 1 ≤ rp.
(easy for spatially cont. case,
discrete case: generalization of results of Jahnke, Lubich, ’00)
in our examples: p = 4, r = 2
Theorem (H., Lubich ’02)
If the commutator bounds hold for p = 4 and r = 2, then error of fourth order Magnus
methods is bounded by
‖yn − y(tn)‖ ≤ Ch4 tn max0≤t≤tn
‖D3y(t)‖
for time steps
h ‖D‖ ≤ c
with C = C(Mm,K, c), m ≤ 4.
Remarks:
• explicit integrators require h‖D‖2 ≤ c for stability,
• error bounds for implicit integrators require smallness of h‖D‖2 for oscillatory problems
General procedure for deriving error bounds
(complete proofs for exponential midpoint rule and fourth order methods)
• cannot use derivation, in particular not A = dexp Ω(Ω′)
• cannot use Taylor expansion of solution
1. Error resulting from truncating the Magnus expansion:
Motivation: Magnus approach starts from
y(t) = exp(Ω(t)
)y0, Ω skew
truncation yields
y(t) = exp(Ω(t)
)y0, Ω skew
differentiate: y(t) is solution of perturbed problem
y′(t) = A(t)y(t) with A(t) = dexpΩ(t)
(Ω′(t)
)with initial value y(0) = y0, A(t) skew hermitian
Lemma ‖ y(t)− y(t) ‖ ≤∫ t
0‖E(τ)y(τ)‖dτ , E = A−A
2. Remainder of dexp series
recall:
dexp Ω(B) = ϕ(adΩ)(B)
truncate ϕ appropriately
ϕ(z) =ez − 1z
= 1 +12z + . . .+
1(p− 1)!
zp−2 +1p!
zp−1rp(z) ,
obtain remainder of truncated dexp Ω series
dexp Ω(B) = B +12
[Ω, B] + . . .+1
(p− 1)!adp−2
Ω (B) +1p!
rp(adΩ)(
adp−1Ω (B)
)we need a bound of type
‖rp(adΩ(t)
)(
adp−1
Ω(t)
(Ω′(t)
))v‖ ≤ Chp ‖Dp−1v‖ , 0 ≤ t ≤ h,
requires h‖D‖ ≤ c for p = 4, no restriction on h for p = 2
Bound on Ev = (A− A)v
exponential midpoint rule (p = 2):
Ω(t) =∫ t
0A(tn + τ)dτ
and
A(t) = dexpΩ(t)
(Ω′(t)
)= A(t) +
12r2(ad
Ω(t))(
adΩ(t)
(Ω′(t)))
=: A(t) + E2(t)
Lemma For p = 2, 4: ‖Ep(t)y(t)‖ ≤ Chp‖Dp−1y(t)‖, 0 ≤ t ≤ hwhere for p = 4, h‖D‖ ≤ c
3. Error resulting from approximating the integrals
nth step: write Ωn = Ω(h) for truncated Magnus series
quadrature: use Ωn instead of Ωn
e.g., for the midpoint rule
Ωn =∫ h
0A(tn + τ)dτ ≈ hA(tn+1/2) =: Ωn
since ‖A′′(t)‖ = ‖V ′′(t)‖ ≤M2, we have ‖Ωn − Ωn‖ ≤ 124M2h
3
Lemma ‖(Ωn − Ωn
)v‖ ≤ Chp+1‖Dr−1v‖
(p = 2, r = 1, proof more difficult for p = 4, r = 2)
Lemma ‖ exp(Ωn)v − exp(Ωn)v‖ ≤ Chp+1‖Dr−1v‖(obvious for r = 1)
4. Putting all steps together
define local error
εn = y(tn+1)− exp(Ωn)y(tn)
= y(tn+1)− exp(Ωn
)y(tn) + exp
(Ωn
)y(tn)− exp(Ωn)y(tn)
= y(tn+1)− y(tn+1) + exp(Ωn
)y(tn)− exp(Ωn)y(tn)
by Steps 1–3
‖εn‖ ≤∫ tn+1
tn
‖Ep(τ)y(τ)‖dτ + Chp+1‖Dr−1y(tn)‖
≤ Chp+1 maxtn≤t≤tn+1
‖Dp−1y(t)‖
error recursion for global error en = yn − y(tn):
en+1 = exp(Ωn)en + εn
yields
‖en‖ ≤ Ctnhp max0≤t≤tn
‖Dp−1y(t)‖
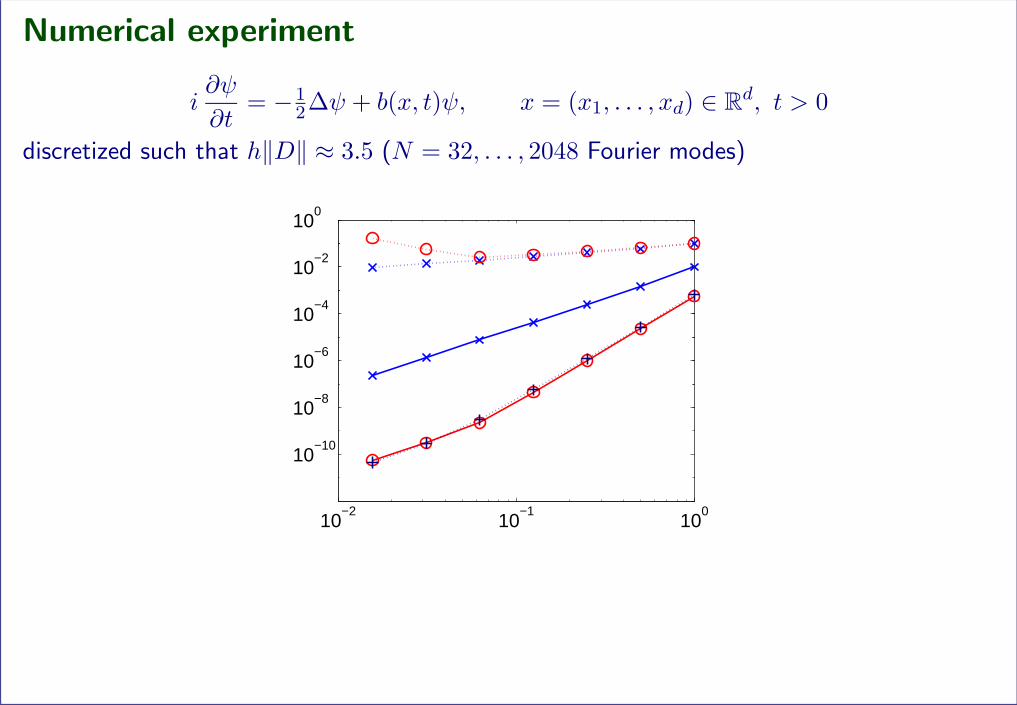
Numerical experiment
i∂ψ
∂t= −1
2∆ψ + b(x, t)ψ, x = (x1, . . . , xd) ∈ Rd, t > 0
discretized such that h‖D‖ ≈ 3.5 (N = 32, . . . , 2048 Fourier modes)
10−2
10−1
100
10−10
10−8
10−6
10−4
10−2
100
Summary
Known in practice: Magnus methods work well for time-dependent Schrodinger equations
here: theoretical explanation for this behavior, in particular
• presented optimal-order error estimates for problems where h‖H(t)‖ is large
• developed new mechanisms which lead to such bounds