ΜΗΧΑΝΙΚΗ, PART 3spn/files/mixaniki-mathima-c1.pdf ·...
11
ΚΛΑΣΙΚΗ ΜΗΧΑΝΙΚΗ, ΚΕΦΑΛΑΙΟ Γ’: ΣΤΕΡΕΑ ΣΩΜΑΤΑ © ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ, ΤΜΗΜΑ ΜΑΘΗΜΑΤΙΚΩΝ, Καθηγητής Σ. ΠΝΕΥΜΑΤΙΚΟΣ 1 ΚΛΑΣΙΚΗ ΜΗΧΑΝΙΚΗ ΚΕΦΑΛΑΙΟ Γ’ ΔΥΝΑΜΙΚΗ ΤΩΝ ΣΤΕΡΩΝ ΣΩΜΑΤΩΝ Τα στερεά σώματα χαρακτηρίζονται από το ότι τα συστατικά τους στοιχεία διατηρούν σταθερές τις μεταξύ τους αποστάσεις κατά τις κινήσεις τους στο χώρο. Τα στερεά σώματα, είτε αποτελούνται από διακριτές σημειακές μάζες, είτε καταλαμβάνουν κάποιο συνεχές χωρίο στον ευκλείδειο χώρο. Στην περίπτωση συνεχούς κατανομής μάζας, θεωρώντας την ενυπάρχουσα μάζα στον στοιχειώδη όγκο του στερεού σώματος, ορίζεται η πυκνότητα μάζας: ρ = Lim Δv→0 Δm Δv . Έτσι προκύπτει η διαφορική σχέση: dm = ρ dv από την οποία υπολογίζεται η συνολική μάζα του στερεού σώματος: m = d m Σ ∫ = ρ( x, y, z ) d v Σ ∫ = ρ( x, y, z ) dx dy dz Σ ∫∫∫ . Το αδρανειακό κέντρο ή κέντρο μάζας ενός στερεού σώματος συνεχούς εντοπίζεται ως εξής: x o = 1 m xd m Σ ∫ = 1 m x ρ( x, y, z ) dx dy dz Σ ∫∫∫ , y o = 1 m yd m Σ ∫ = 1 m y ρ( x, y, z ) dx dy dz Σ ∫∫∫ , z o = 1 m zd m Σ ∫ = 1 m z ρ( x, y, z ) dx dy dz Σ ∫∫∫ . Στα ομογενή στερεά σώματα με σταθερής πυκνότητας μάζας προκύπτει: x o = 1 v x dx dy dz Σ ∫∫∫ , y o = 1 v y dx dy dz Σ ∫∫∫ , z o = 1 v z dx dy dz Σ ∫∫∫ , v = dx dy dz Σ ∫∫∫ . Κίνηση στερεού σώματος στο χώρο.
Transcript of ΜΗΧΑΝΙΚΗ, PART 3spn/files/mixaniki-mathima-c1.pdf ·...

ΚΛΑΣΙΚΗ ΜΗΧΑΝΙΚΗ, ΚΕΦΑΛΑΙΟ Γ’: ΣΤΕΡΕΑ ΣΩΜΑΤΑ © ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ, ΤΜΗΜΑ ΜΑΘΗΜΑΤΙΚΩΝ, Καθηγητής Σ. ΠΝΕΥΜΑΤΙΚΟΣ 1
ΚΛΑΣΙΚΗ ΜΗΧΑΝΙΚΗ
ΚΕΦΑΛΑΙΟ Γ’
ΔΥΝΑΜΙΚΗ ΤΩΝ ΣΤΕΡΩΝ ΣΩΜΑΤΩΝ
Τα στερεά σώματα χαρακτηρίζονται από το ότι τα συστατικά τους στοιχεία διατηρούν σταθερές τις
μεταξύ τους αποστάσεις κατά τις κινήσεις τους στο χώρο. Τα στερεά σώματα, είτε αποτελούνται από
διακριτές σημειακές μάζες, είτε καταλαμβάνουν κάποιο συνεχές χωρίο στον ευκλείδειο χώρο. Στην
περίπτωση συνεχούς κατανομής μάζας, θεωρώντας την ενυπάρχουσα μάζα στον στοιχειώδη όγκο
του στερεού σώματος, ορίζεται η πυκνότητα μάζας:
ρ = Lim
Δv→0
Δm
Δv.
Έτσι προκύπτει η διαφορική σχέση:
dm = ρ dv
από την οποία υπολογίζεται η συνολική μάζα του στερεού σώματος:
m = dm
Σ∫ = ρ(x, y,z)dvΣ∫ = ρ(x, y,z)dx dy dz
Σ∫∫∫ .
Το αδρανειακό κέντρο ή κέντρο μάζας ενός στερεού σώματος συνεχούς εντοπίζεται ως εξής:
xo =
1m
x dmΣ∫ = 1
mx ρ(x, y,z)dx dy dz
Σ∫∫∫ ,
yo =
1m
y dmΣ∫ = 1
my ρ(x, y,z)dx dy dz
Σ∫∫∫ ,
zo =
1m
z dmΣ∫ = 1
mz ρ(x, y,z)dx dy dz
Σ∫∫∫ .
Στα ομογενή στερεά σώματα με σταθερής πυκνότητας μάζας προκύπτει:
xo =
1v
x dx dy dzΣ∫∫∫ ,
yo =
1v
y dx dy dzΣ∫∫∫ ,
zo =
1v
z dx dy dzΣ∫∫∫ ,
v= dx dy dz
Σ∫∫∫ .
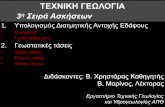
Κίνηση στερεού σώματος στο χώρο.

ΚΛΑΣΙΚΗ ΜΗΧΑΝΙΚΗ, ΚΕΦΑΛΑΙΟ Γ’: ΣΤΕΡΕΑ ΣΩΜΑΤΑ © ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ, ΤΜΗΜΑ ΜΑΘΗΜΑΤΙΚΩΝ, Καθηγητής Σ. ΠΝΕΥΜΑΤΙΚΟΣ 2
Κατά τη διάρκεια της κίνησης ενός στερεού σώματος στον τρισδιάστατο ευκλείδειο χώρο, κάθε χρο-‐
νική στιγμή, η θέση του προσδιορίζεται από τη θέση του αδρανειακού του κέντρου στο ευκλείδειο
σύστημα αναφοράς και από ένα στοιχείο της ομάδας χωρικών στροφών SO(3) . Συνεπώς, η χρονική
εξέλιξή του αναπαρίσταται με μια συνεχή διαδοχή σημείων στο θεσεογραφικό χώρο ο οποίος ορίζε-‐
ται από το τοπολογικό γινόμενο 3 × SO(3) .1
Ο όρος αδρανειακό σύστημα αναφοράς ℜ του στερεού σώματος δηλώνει ένα σύστημα αναφοράς,
επικεντρωμένο στο αδρανειακό του κέντρο, το οποίο διατηρεί τους άξονές του σε παραλληλία προς
τους αντίστοιχους άξονες του ευκλείδειου συστήματος αναφοράς.
Ο όρος ενσωματωμένο σύστημα αναφοράς ℜ∗ του στερεού σώματος δηλώνει ένα σύστημα ανα-‐
φοράς, επικεντρωμένο στο αδρανειακό του κέντρο, του οποίου οι άξονες είναι ενσωματωμένοι στο
στερεό σώμα και την αρχική στιγμή της κίνησης ταυτίζονται με τους αντίστοιχους άξονες του αδρα-‐
νειακού συστήματος αναφοράς ℜ .
Κάθε χρονική στιγμή, η στροφική τοποθέτηση του στερεού σώματος ορίζεται από την τοποθέτηση
του ενσωματωμένου συστήματος αναφοράς ℜ∗ ως προς το αδρανειακό σύστημα αναφοράς ℜ .
Συμβολίζουμε τις συντεταγμένες των δυο αυτών συστημάτων αναφοράς ως εξής:
ℜ[x, y,z] και ℜ∗[ ′x , ′y , ′z ] .
Στιγμιότυπα της εξέλιξης ενός στερεού σώματος στον τρισδιάστατο ευκλείδειο χώρο.
Σε κάθε στιγμιότυπο διακρίνεται το αδρανειακό και το ενσωματωμένο σύστημα αναφοράς.
1 Θα μπορούσαμε να πούμε ότι ο θεσεογραφικός χώρος των στερεών σωμάτων είναι το τοπολογικό γινόμενο
3 ×O(3) όπου υπεισέρχεται όλη η ορθογώνια ομάδα του τρισδιάστατου ευκλείδειου χώρου. Η επιλογή του χωρικού προσανατολισμού θα καθόριζε τότε την τοπολογική συνεκτική συνιστώσα στην οποία θα καταγραφόταν η στροφική κίνηση των στερεών σωμά-‐των. Εντούτοις, ας σημειωθεί ότι μόνο η τοπολογική συνιστώσα που εκφράζει τις χωρικές στροφές είναι υποομάδα της ορ-‐θογώνιας ομάδας αφού αυτή περιέχει το ουδέτερο στοιχείο της ορθογώνιας ομάδας, δηλαδή τον ταυτοτικό μετασχηματισμό του τρισδιάστατου ευκλείδειου χώρου.

ΚΛΑΣΙΚΗ ΜΗΧΑΝΙΚΗ, ΚΕΦΑΛΑΙΟ Γ’: ΣΤΕΡΕΑ ΣΩΜΑΤΑ © ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ, ΤΜΗΜΑ ΜΑΘΗΜΑΤΙΚΩΝ, Καθηγητής Σ. ΠΝΕΥΜΑΤΙΚΟΣ 3
۞ Η ΓΩΝΙΑΚΗ ΤΑΧΥΤΗΤΑ ΤΩΝ ΣΤΕΡΕΩΝ ΣΩΜΑΤΩΝ
Η γωνιακή ταχύτητα ενός στερεού σώματος ορίζεται ως εκείνη του ενσωματωμένου συστήματος
αναφοράς ℜ∗
σε σχέση προς το αδρανειακό σύστημα αναφοράς ℜ :
ω(t) ≡ ω 1(t),ω2(t),ω3(t)( )
όπου οι συνιστώσες της είναι ορισμένες σε ένα διάστημα του χρονικού άξονα:
ω i : I→ , i = 1,2,3.
Ο παρατηρητής που βρίσκεται στο αδρανειακό σύστημα αναφοράς βλέπει την ορθοκανονική βάση
′e1(t),
′e2(t), ′e3(t) του ενσωματωμένου στο στερεό σώμα συστήματος αναφοράς να περιστρέφεται με
την πάροδο του χρόνου στο χώρο και παραγωγίζοντας από το δικό του σύστημα αναφοράς, με τον
δικό του τελεστή παραγώγισης, θεωρεί τις ακόλουθες αποσυνθέσεις: 2
dℜ ′e1(t)dt
= a1(t) ′e1(t)+ a2(t) ′e2(t)+ a3(t) ′e3(t) ,
dℜ ′e2(t)dt
= b1(t) ′e1(t)+ b2(t) ′e2(t)+ b3(t) ′e3(t) ,
dℜ ′e3(t)dt
= c1(t) ′e1(t)+ c2(t) ′e2(t)+ c3(t) ′e3(t) ,
και προκύπτουν οι εκφράσεις:
dℜ ′e1(t)dt
= 0 ′e1(t)+ω3(t) ′e2(t)−ω 2(t) ′e3(t) ,
dℜ ′e2(t)dt
= −ω3(t) ′e1(t)+ 0 ′e2(t)+ω1(t) ′e3(t) ,
dℜ ′e3(t)dt
= ω 2(t) ′e1(t)−ω1(t) ′e2(t)+ 0 ′e3(t) .
2 Ένας απλός συνδυαστικός υπολογισμός οδηγεί στον προσδιορισμό των συντελεστών της αποσύνθεσης:
i = j ⇒ < ′ei (t),
′ei (t) > = 1 ⇒ddt
< ′ei (t),′ei (t) > = 0 ⇒
⇒ < ′ei (t),
dℜ ′ei (t)dt
> + <dℜ ′ei (t)
dt, ′ei (t) > = 0 ⇒ < ′ei (t),
dℜ ′ei (t)dt
> = 0 ,
i ≠ j ⇒ < ′ei (t),
′ej (t) > = 0 ⇒ddt
< ′ei (t),′ej (t) > = 0 ⇒
⇒ < ′ei (t),
dℜ ′ej (t)dt
> + <dℜ ′ei (t)
dt, ′ej (t) > = 0 ⇒ < ′ei (t),
dℜ ′ej (t)dt
> = − < ′ej (t),dℜ ′ei (t)
dt> .
Μετά τους υπολογισµούς και τον προσδιορισµό των συσχετισµών των συντελεστών θέτουµε:
1 3 2( ) : ( ) ( )t b t c tω = = − , 2 1 3( ) : ( ) ( )t c t a tω = = − , 3 2 1( ) : ( ) ( )t a t b tω = = − .

ΚΛΑΣΙΚΗ ΜΗΧΑΝΙΚΗ, ΚΕΦΑΛΑΙΟ Γ’: ΣΤΕΡΕΑ ΣΩΜΑΤΑ © ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ, ΤΜΗΜΑ ΜΑΘΗΜΑΤΙΚΩΝ, Καθηγητής Σ. ΠΝΕΥΜΑΤΙΚΟΣ 4
Το συμπέρασμα αυτής της υπολογιστικής διαδικασίας συνοψίζεται ως εξής:
dℜ ′ei(t)dt
=ω(t)× ′ei(t) , 1,2,3i = .
Από τη σχέση αυτή ορίζεται η γωνιακή ταχύτητα του περιστρεφόμενου συστήματος αναφοράς ℜ∗
ως προς το αδρανειακό σύστημα αναφοράς ℜ :
ω(t) = ω1(t),ω 2(t),ω3(t)( ) .
και εισάγοντας τον τελεστή γωνιακής ταχύτητας:
L ω (t) =0 −ω3(t) ω 2(t)
ω3(t) 0 −ω1(t)
−ω 2(t) ω1(t) 0
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
καταλήγουμε στη σχέση:
Lω(t)ξ =ω(t)×
ξ , ∀
ξ ∈3 .
۞ Ο ΤΕΛΕΣΤΗΣ ΠΕΡΙΣΤΡΟΦΗΣ ΤΩΝ ΣΤΕΡΕΩΝ ΣΩΜΑΤΩΝ
Ο Leonhard Euler (1707-‐1783) και ο Michel Chasles (1793-‐1880) έδωσαν το περίφημο θεώρημά τους
δηλώνοντας ότι η κίνηση ενός στερεού σώματος αποσυντίθεται κάθε χρονική στιγμή σε στιγμιαία
χωρική μεταφορά και στιγμιαία χωρική στροφή και αν κατά την κίνηση κάποιο από τα σημεία του
παραμένει ακίνητο τότε πρόκειται απλά για περιστροφή γύρω από άξονα διερχόμενο από αυτό το
σημείο που καλείται στιγμιαίος άξονας περιστροφής. Στο αδρανειακό σύστημα αναφοράς του στε-‐
ρεού σώματος, το αδρανειακό κέντρο προφανώς παραμένει ακίνητο και κάθε χρονική στιγμή ο στιγ-‐
μιαίος άξονας περιστροφής ορίζεται από τον ιδιοάξονα του στοιχείου της ομάδας χωρικών στροφών
που αποδίδει στο στερεό σώμα ο τελεστής περιστροφής του. Στο αδρανειακό σύστημα αναφοράς
του στερεού σώματος καταγράφεται μόνο η στροφική κίνησή του και κάθε χρονική στιγμή η θέση
και η ταχύτητα οποιουδήποτε σημείου του προσδιορίζονται ως εξής:
′R i(t) = S(t) ′
R i(0) ,
′R i(t) = S(t) ′R i(0) , ∀t ∈Ι .
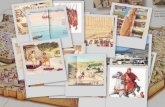
Το στερεό σώμα ακολουθεί την κίνηση του αδρανειακού του κέντρου
και κάθε σημείο του περιστρέφεται όπως καθορίζει ο τελεστής περιστροφής.

ΚΛΑΣΙΚΗ ΜΗΧΑΝΙΚΗ, ΚΕΦΑΛΑΙΟ Γ’: ΣΤΕΡΕΑ ΣΩΜΑΤΑ © ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ, ΤΜΗΜΑ ΜΑΘΗΜΑΤΙΚΩΝ, Καθηγητής Σ. ΠΝΕΥΜΑΤΙΚΟΣ 5
Ο τελεστής περιστροφής ενός στερεού σώματος ορίζεται ως απεικόνιση του χρονικού διαστήματος
της εξέλιξής του στην ομάδα στροφών του τρισδιάστατου ευκλείδειου χώρου:
S : I→ SO(3) , S(0) = I
3 .
Η θέση του στερεού σώματος στον τρισδιάστατο ευκλείδειο χώρο, κάθε χρονική στιγμή της εξέλιξής
του, ορίζεται με ένα σημείο του θεσεογραφικού χώρου:
(R(t) , S(t))∈3 × SO(3)
όπου R(t) συμβολίζει το διάνυσμα θέσης του αδρανειακού του κέντρου και S(t) το στοιχείο της
ομάδας χωρικών στροφών που αποδίδει ο τελεστής περιστροφής τη δεδομένη αυτή στιγμή.
• ΘΕΩΡΗΜΑ CHASLES-‐EULER 3
Η κίνηση ενός στερεού σώματος στο χώρο ορίζεται από την κίνηση του αδρανειακού του κέντρου και
από μια διαφορίσιμη απεικόνιση του χρονικού διαστήματος εξέλιξης στην ομάδα στροφών:
S : I→ SO(3) , S(0) = I
3 .
που καθορίζει κάθε χρονική στιγμή τη θέση οποιουδήποτε σημείου του:
R i(t) = S(t) ′
R i(0)+
R(t) , ∀t ∈I ,
και την ταχύτητά του:
R i(t) = S(t) ′
R i(0)+
R(t) , ∀t ∈I .
Στον τελεστή της γωνιακής ταχύτητας κάθε στερεού σώματος προσαρτάται μονοσήμαντα ο τελεστής
περιστροφής του που προκύπτει από τη λύση της εξίσωσης: 4
S(t) = S(t) L ω (t) ,
S(0) = I3 .
3 Συμβολίζουμε
R i (t) και
′R i (t) αντίστοιχα το διάνυσμα θέσης ενός οποιουδήποτε σημείου του στερεού σώματος στο
ευκλείδειο σύστημα αναφοράς και στο αδρανειακό σύστημα αναφοράς που είναι επικεντρωμένο στο αδρανειακό κέντρο του στερεού σώματος και
R(t) συμβολίζει το διάνυσμα θέσης του αδρανειακού κέντρου του στερεού σώματος:
R i(t) =
R(t)+
′R i(t).
Για την απόδειξη αυτού του θεωρήματος βλ. Κλασική Μηχανική, Σ. Πνευματικού, Αθήνα 2006.
4 Ο ανάστροφος πίνακας του τελεστή της γωνιακής ταχύτητας είναι ο θεμελιώδης πίνακας της γραμμικής εξίσωσης:
X(t) = −L ω (t) X(t), X(t) =ΤS(t).
ddt
S(t) TS(t)( ) = S(t) TS(t)+S(t) T S(t) = S(t)L ω (t)( )TS(t)+S(t) TL ω (t) TS(t)( ) = S(t)L ω (t) TS(t)−S(t)L ω (t) TS(t) = 0
⇒ S(0) = I
3 ⇒ S(t) TS(t) = I3 ⇒ S(t)∈O(3)
και από τον τύπο του Liouville προκύπτει:
detS(t) = det TS(t) = e Tr(−L ω (s))ds0
t
∫ = e0 = 1 ⇒ S(t)∈SO(3) .

ΚΛΑΣΙΚΗ ΜΗΧΑΝΙΚΗ, ΚΕΦΑΛΑΙΟ Γ’: ΣΤΕΡΕΑ ΣΩΜΑΤΑ © ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ, ΤΜΗΜΑ ΜΑΘΗΜΑΤΙΚΩΝ, Καθηγητής Σ. ΠΝΕΥΜΑΤΙΚΟΣ 6
• ΠΑΡΑΔΕΙΓΜΑ. Περιστροφή του στερεού σώματος γύρω από σταθερό άξονα.
Όταν ένα στερεό σώμα περιστρέφεται στο χώρο γύρω από ένα σταθερό άξονα με σταθερή γωνιακή
ταχύτητα, ο τελεστής της γωνιακής του ταχύτητας εκφράζεται στην ευκλείδεια βάση ως εξής:
ω = ω1,ω2 ,ω3( ) ⇒
L ω =
0 −ω3 ω2
ω3 0 −ω1
−ω2 ω1 0
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
.
Ο τελεστής περιστροφής προσδιορίζεται τότε ως εξής:
S(t) = S(t)L ω ⇒
T S(t) = −L ωTS(t) ⇒ S(t) = eL ω t ,
S(0) = I
3 .
Συνεπώς, στο αδρανειακό σύστημα αναφοράς του στερεού σώματος η θέση και η ταχύτητα κάθε ση-‐
μείου του υπολογίζονται ως εξής:
′R i(t) = eL ω t ′
R i(0) ,
′R i(t) = eL ω t
L ω ′R i(0) = eL ω t ω × ′
R i(0)( ) ,
και στο ευκλείδειο σύστημα αναφοράς προκύπτει:
R i(t) = eL ω t ′R i(0)+
R(t) ,
R i(t) = eL ω t ω × ′
R i(0)( ) + R(t) .
Εδώ είναι ενδιαφέρον να σημειωθεί ότι αλλάζοντας τη βάση του ευκλείδειου χώρου έτσι ώστε ο τρί-‐
τος άξονας να ταυτιστεί με τον άξονα που ορίζεται από το σταθερό διάνυσμα γωνιακής ταχύτητας, ο
πίνακας του τελεστή της γωνιακής ταχύτητας εκφράζεται ως εξής:
′L ω =0 − |
ω | 0
|ω | 0 0
0 0 0
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
.
Πράγματι, το χαρακτηριστικό πολυώνυμο του τελεστή της γωνιακής ταχύτητας:
det(L ω − λ I
3 ) = λ(λ2+ |ω |2 )
δέχεται μια μηδενική και δυο φανταστικές ιδιοτιμές ±i |ω | και σχηματίζεται η βάση Jordan:
ζ1 = |
ω | (ω2 ,−ω1,0) ,
ζ1 = (ω1ω3,ω2ω3,−ω1
2 −ω22 ) ,
ζ3 =ω ,
στην οποία προκύπτει η προαναφερόμενη έκφραση:
′L ω = P−1L ω P , P =
ζ1,ζ2 ,ζ3
⎡⎣ ⎤⎦ .
Όταν το στερεό σώμα περιστρέφεται στο χώρο γύρω από ένα σταθερό άξονα με σταθερή γωνιακή
επιτάχυνση τότε τα στοιχεία του τελεστή της γωνιακής του ταχύτητας εξαρτώνται γραμμικά από το
χρόνο και χωρίς ιδιαίτερη δυσκολία αντιμετωπίζεται η επίλυση της εξίσωσης:
S(t) = S(t)L ω (t) ,
S(0) = I
3 .

ΚΛΑΣΙΚΗ ΜΗΧΑΝΙΚΗ, ΚΕΦΑΛΑΙΟ Γ’: ΣΤΕΡΕΑ ΣΩΜΑΤΑ © ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ, ΤΜΗΜΑ ΜΑΘΗΜΑΤΙΚΩΝ, Καθηγητής Σ. ΠΝΕΥΜΑΤΙΚΟΣ 7
Για παράδειγμα:
ω = 0,0,2t( ) ⇒
L ω (t) =0 −2t 0
2t 0 0
0 0 0
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
.
⇒ S(t) =cost2 −sin t2 0sin t2 cost2 0
0 0 1
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
.
Συνεπώς, στο ευκλείδειο σύστημα αναφοράς η θέση και η ταχύτητα κάθε σημείου του στερεού σώ-‐
ματος προσδιορίζονται ως εξής:
R i(t) = S(t) ′
R i(0)+
R(t) ,
R i(t) = S(t) ′R i(0)+
R(t) .
Το στερεό σώμα ακολουθώντας την κίνηση του αδρανειακού του κέντρου εκτελεί περιστροφική κίνηση.
۞ Ο ΤΕΛΕΣΤΗΣ ΑΔΡΑΝΕΙΑΣ ΤΩΝ ΣΤΕΡΕΩΝ ΣΩΜΑΤΩΝ
Ο τελεστής αδράνειας κάθε στερεού σώματος περιέχει τα χαρακτηριστικά της γεωμετρίας της μάζας
του που υπαγορεύουν την αδρανειακή του συμπεριφορά στο χώρο και τα χαρακτηριστικά αυτά εκ-‐
φράζονται με τις αδρανειακές ροπές του και τα αδρανειακά τους γινόμενα.
Η έννοια της αδρανειακής ροπής πρωτοεμφανίστηκε σε κείμενα του Christian Huygens (1629-‐1695).5
Η αδρανειακή ροπή μιας σημειακής μάζας ως προς έναν άξονα ορίστηκε ως το γινόμενο της μάζας με
το τετράγωνο της απόστασής της από τον άξονα και η αδρανειακή ροπή ενός συστήματος σημειακών
μαζών ορίστηκε ως το άθροισμα των αδρανειακών ροπών των συστατικών του στοιχείων:
Ιξ = miri
2
i=1
N
∑ .
Η αδρανειακή ροπή ενός στερεού σώματος ως προς έναν άξονα ορίζεται από την άθροιση των αδρα-‐
νειακών ροπών των συστατικών του στοιχείων ως εξής:
Iξ = lim
N→+∞miri
2 = r 2 dmΣ∫
i=1
N
∑ .
Στον ευκλείδειο χώρο, εισάγοντας το μοναδιαίο διάνυσμα του άξονα ως προς τον οποίο λογίζεται η
αδρανειακή ροπή και το διάνυσμα θέσης των σημείων του στερεού σώματος, προκύπτει:
Iξ =
ξ ×OM ( )2
dmΣ∫ .
5 Η ποσότητα mr2 που εκφράζει την αδρανειακή ροπή εμφανίστηκε στα κείμενά του το 1673 όταν μελετούσε το πρόβλημα του εντοπισμού του κέντρου ταλάντωσης ενός σύνθετου εκκρεμούς. Το φυσικό της νόημα φαίνεται να προϋπήρχε σε κείμενα του René Descartes (1596-‐1650) και αργότερα συγκεκριμενοποιήθηκε σε κείμενα του Leonhard Euler (1707-‐1783). Από τότε άρχισε να χρησιμοποιείται συστηματικά και η ονομασία αδρανειακή ροπή δόθηκε το 1810.

ΚΛΑΣΙΚΗ ΜΗΧΑΝΙΚΗ, ΚΕΦΑΛΑΙΟ Γ’: ΣΤΕΡΕΑ ΣΩΜΑΤΑ © ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ, ΤΜΗΜΑ ΜΑΘΗΜΑΤΙΚΩΝ, Καθηγητής Σ. ΠΝΕΥΜΑΤΙΚΟΣ 8
Οι αδρανειακές ροπές ενός στερεού σώματος ως προς τους άξονες του ευκλείδειου συστήματος ανα-‐
φοράς υπολογίζονται αντίστοιχα ως εξής:
Ixx = ( y2+ z2 )dm
Σ∫∫∫ , I yy = (z2+ x2 )dm
Σ∫∫∫ , Izz = (x2+ y2 )dm
Σ∫∫∫ .
Τα αδρανειακά γινόμενα του στερεού σώματος ως προς τα επίπεδα συντεταγμένων του ευκλείδειου
χώρου ορίζονται αντίστοιχα ως εξής:
Ixy = I yx = − x y dm
Σ∫∫∫ , I yz = Izy = − yz dm
Σ∫∫∫ , Izx = Ixz = − zx dm
Σ∫∫∫ .
Έτσι, προκύπτει η αδρανειακή ροπή ενός στερεού σώματος ως προς έναν οποιονδήποτε άξονα διερ-‐
χόμενο από την αρχή του ευκλείδειου χώρου που σχηματίζει με τους άξονες του ευκλείδειου συστή-‐
ματος αναφοράς αντίστοιχες γωνίες ϕx ,ϕ y ,ϕz :
Iξ = Ixx cos2 ϕx + I yy cos2 ϕ y + Izz cos2 ϕz + 2 Ixy cosϕx cosϕ y + I yz cosϕ y cosϕz + Izx cosϕz cosϕx( ).
Στο αδρανειακό σύστημα αναφοράς που είναι επικεντρωμένο στο αδρανειακό κέντρο του στερεού
σώματος ισχύουν οι ανάλογες σχέσεις εκφρασμένες στις αντίστοιχες συντεταγμένες και εισάγοντας,
σε αυτό το σύστημα αναφοράς, το μοναδιαίο διάνυσμα του άξονα ως προς τον οποίο λογίζεται η
αδρανειακή ροπή και το διάνυσμα θέσης των σημείων του στερεού σώματος, προκύπτει:
Iξ =
ξ ×GM ( )2
dmΣ∫ .
ΘΕΩΡΗΜΑ ΠΑΡΑΛΛΗΛΩΝ ΑΞΟΝΩΝ HUYGENS – STEINER
Η αδρανειακή ροπή ενός στερεού σώματος μάζας m ως προς έναν άξονα ξ διερχόμενο από το αδρα-‐
νειακό του κέντρο και η αδρανειακή του ροπή ως προς οποιονδήποτε παράλληλο άξονα ξ’ που βρί-‐
σκεται σε απόσταση από τον άξονα ξ σχετίζονται ως εξής:
I ′ξ = Iξ + m2 .
Απόδειξη. Θεωρώντας ένα σημείο Μ του στερεού σώματος και σημειώνοντας Κ την ορθογώνια προβολή του
στον άξονα ξ και Κ’ την ορθογώνια προβολή του Κ στον άξονα ξ’, προκύπτει:
Iξ = M ′K
( )2dm
Σ∫ = MK
+ K ′K ( )2
dmΣ∫ = MK
( )2dm
Σ∫ + K ′K ( )2
dmΣ∫ + 2 < MK
, K ′K
>dmΣ∫ =
= Iξ + m2 + 2 < ( MG
+GK
), K ′K
> dmΣ∫ = Iξ + m2 + 2 < ( MG
+GK
), K ′K
> dmΣ∫ =
= Iξ + m2 + 2 < MG
, K ′K
> dmΣ∫ + 2 < GK
, K ′K
> dmΣ∫ = Iξ + m2 .6 □
Με το προηγούμενα δεδομένα μπορούμε να συμπεράνουμε την αδρανειακή ροπή κάθε στερεού σώ-‐
ματος ως προς οποιονδήποτε άξονα στο χώρο και προς τούτο αρκεί να υπολογιστούν οι αδρανειακές
του ροπές και τα αδρανειακά του γινόμενα ως προς το αδρανειακό σύστημα αναφοράς ή ως προς το
ευκλείδειο σύστημα αναφοράς.
6 Ο μηδενισμός των δυο ολοκληρωμάτων προκύπτει αντίστοιχα από τον ορισμό του αδρανειακού κέντρου και GK
⊥ K ′K
.

ΚΛΑΣΙΚΗ ΜΗΧΑΝΙΚΗ, ΚΕΦΑΛΑΙΟ Γ’: ΣΤΕΡΕΑ ΣΩΜΑΤΑ © ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ, ΤΜΗΜΑ ΜΑΘΗΜΑΤΙΚΩΝ, Καθηγητής Σ. ΠΝΕΥΜΑΤΙΚΟΣ 9
• Ο τελεστής αδράνειας ενός στερεού σώματος εκφράζει τη γεωμετρία της μάζας του και ορίζεται
ως γραμμική απεικόνιση του ευκλείδειου χώρου ως εξής:
I :3 → 3, I(
ξ) = OM
× (ξ ×OM
)dmΣ∫ .
Η απεικόνιση αυτή δεν εξαρτάται από το χρόνο και στην ορθοκανονική βάση του ευκλείδειου χώρου,
θεωρώντας τις αδρανειακές ροπές και τα αδρανειακά γινόμενα του στερεού σώματος, εκφράζεται
με τον συμμετρικό πίνακα:
ℑ( e1 ,e2 ,e3 ) =
Ixx I yx Izx
Ixy I yy Izx
Ixz I yz Izz
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
όπου:
Ixx = ( y2+ z2 )dm
Σ∫∫∫ , I yy = (z2+ x2 )dm
Σ∫∫∫ , Izz = (x2+ y2 )dm
Σ∫∫∫ ,
Ixy = I yx = − x y dm
Σ∫∫∫ , I yz = Izy = − yz dm
Σ∫∫∫ , Izx = Ixz = − zx dm
Σ∫∫∫ .
Ο ορισμός του τελεστή αδράνειας έχει την προέλευση του στο ότι από την κλασική έκφραση της
αδρανειακής ροπής ενός στερεού σώματος ως προς έναν οποιονδήποτε άξονα:
Iξ =
ξ ×OM ( )2
dmΣ∫
προκύπτει: 7
Ιξ = <
ξ , OM
× (ξ ×OM
)dmΣ∫ > .
Επίσης, θεωρώντας στην ορθοκανονική βάση του ευκλείδειου χώρου την αποσύνθεση:
OM
= x e1 + y e2 + z e3 ξ = ξ1
e1 + ξ2e2 + ξ3
e3 προκύπτει:
OM
× (ξ ×OM
)dmΣ∫ = Ixxξ1 − Ixyξ2 − Ixzξ3,− Ixyξ1 + I yyξ2 − I yzξ3,− Ixzξ1 − I yzξ2 + Izzξ3( )
και στα στερεά σώματα διακριτών σημειακών μαζών η σχέση αυτή εκφράζεται ως εξής:
mi
′Ri(0)×
ξ ×′Ri(0)( )
i=1
N
∑ = Ixxξ1 − Ixyξ2 − Ixzξ3,− Ixyξ1 + I yyξ2 − I yzξ3,− Ixzξ1 − I yzξ2 + Izzξ3( ) . Ο τελεστής αδράνειας αποδίδει λοιπόν σε κάθε διάνυσμα του ευκλείδειου χώρου ένα άλλο διάνυ-‐
σμα που εκφράζεται στην ορθοκανονική βάση ως εξής:
′ξ1′ξ2′ξ3
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥=
Ixx Ixy Ixz
I yx I yy I yz
Izx Izy Izz
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
ξ1ξ2ξ3
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
7 Ένας απλός υπολογισμός υποδεικνύει ότι:
(ξ ×OM
)2 dmΣ∫ = < (
ξ ×OM
),(ξ ×OM
) >dmΣ∫ =
ξ,OM
,ξ ×OM ( )dm
Σ∫ =
OM
,ξ ×OM
,ξ( )dm
Σ∫ = < OM
× (ξ ×OM )
,ξ >dm
Σ∫ = <ξ, OM
× (ξ ×OM
)dmΣ∫ > .

ΚΛΑΣΙΚΗ ΜΗΧΑΝΙΚΗ, ΚΕΦΑΛΑΙΟ Γ’: ΣΤΕΡΕΑ ΣΩΜΑΤΑ © ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ, ΤΜΗΜΑ ΜΑΘΗΜΑΤΙΚΩΝ, Καθηγητής Σ. ΠΝΕΥΜΑΤΙΚΟΣ 10
Ο τελεστής αδράνειας διαθέτει τρεις πραγματικές ιδιοτιμές:
0 ≤ I1 ≤ I2 ≤ I3 .
Οι ιδιοτιμές αυτές καλούνται κύριες αδρανειακές ροπές του στερεού σώματος και τα αντίστοιχα ιδι-‐
οδιανύσματα ορίζουν τους λεγόμενους κύριους αδρανειακούς άξονες του στερεού σώματος:
ℑ(ξ1) = I1
ξ1 , ℑ(
ξ2 ) = I2
ξ2 , ℑ(
ξ3) = I3
ξ3 .
Οι άξονες αυτοί συγκροτούν ένα τρισορθογώνιο σύστημα αναφοράς που καλείται σύστημα κύριων
αδρανειακών αξόνων του στερεού σώματος και στην ορθοκανονική του βάση ο πίνακας του τελεστή
αδράνειας αποκτά διαγώνια έκφραση: 8
ℑ(ξ1,ξ2 ,ξ3 )
=
I1 0 0
0 I2 0
0 0 I3
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
.
Το σύστημα των κύριων αδρανειακών αξόνων κάθε στερεού σώματος εξαρτάται αποκλειστικά από
τη γεωμετρία της μάζας του και κατά συνέπεια εκλαμβάνεται ως ενσωματωμένο σε αυτό και επικεν-‐
τρωμένο στο αδρανειακό του κέντρο. Το σύστημα των κύριων αδρανειακών αξόνων ενός στερεού
σώματος είναι μονοσήμαντα ορισμένο όταν οι κύριες αδρανειακές ροπές, δηλαδή οι ιδιοτιμές του
τελεστή αδράνειας, είναι μεταξύ τους διαφορετικές, ενώ όταν εμφανίζεται διπλή ή τριπλή ιδιοτιμή
υπάρχει δυνατότητα επιλογής της βάσης των ιδιοδιανυσμάτων, άρα του συστήματος των κύριων
αδρανειακών αξόνων. Στα ομογενή στερεά σώματα κάθε ενδεχόμενος άξονας συμμετρίας είναι κύρι-‐
ος αδρανειακός τους άξονας. Η απόλυτη συμμετρία ενός στερεού σώματος, όπως ενός ομογενούς
σφαιρικού στερεού σώματος, υπαγορεύει ότι όλοι οι άξονες που διέρχονται από το κέντρο του είναι
κύριοι αδρανειακοί άξονες, άρα κάθε τρισορθογώνιο σύστημα αξόνων τοποθετημένο στο κέντρο του
είναι σύστημα κύριων αδρανειακών αξόνων. Όταν ένα ομογενές στερεό σώμα διαθέτει επίπεδο συμ-‐
μετρίας τότε ο κάθετος άξονας που διέρχεται από το αδρανειακό του κέντρο είναι κύριος αδρανει-‐
ακός άξονας και επιλέγοντας δυο οποιουσδήποτε ορθογώνιους μεταξύ τους άξονες αυτού του επιπέ-‐
δου συγκροτείται ένα σύστημα κύριων αδρανειακών αξόνων.
• H συνάρτηση αδρανειακής ροπής ενός στερεού σώματος ορίζεται ως εξής:
I :3−{0}→ , I(
ξ) = < ℑ(
ξ),ξ >
<ξ,ξ >
.
Στα συγγραμμικά διανύσματα του ευκλείδειου χώρου προφανώς αποδίδεται ίδια αριθμητική τιμή:
I(λξ) = I(
ξ) , ∀λ ∈ .
8 Οι συμμετρικοί τελεστές έχουν πάντα πραγματικές ιδιοτιμές και η πολλαπλότητά τους ορίζει τη διάσταση του αντίστοιχου ιδιόχωρου. Από το εξωτερικό γινόμενο δυο γραμμικά ανεξάρτητων ιδιοδιανυσμάτων προκύπτει ιδιοδιάνυσμα και έτσι, ανε-‐ξαρτήτως της πολλαπλότητας κάθε ιδιοτιμής, διασφαλίζεται η ύπαρξη ορθοκανονικής βάσης ιδιοδιανυσμάτων στην οποία ο συμμετρικός πίνακας αποκτά διαγώνια έκφραση. Η ορθοκανονική αυτή βάση ορίζει το σύστημα των κύριων αδρανειακών αξόνων του στερεού σώματος, το οποίο θεωρείται ενσωματωμένο σε αυτό και τοποθετημένο στο αδρανειακό του κέντρο.

ΚΛΑΣΙΚΗ ΜΗΧΑΝΙΚΗ, ΚΕΦΑΛΑΙΟ Γ’: ΣΤΕΡΕΑ ΣΩΜΑΤΑ © ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ, ΤΜΗΜΑ ΜΑΘΗΜΑΤΙΚΩΝ, Καθηγητής Σ. ΠΝΕΥΜΑΤΙΚΟΣ 11
Έτσι, σε κάθε διανυσματική ευθεία του ευκλείδειου χώρου αποδίδεται μια αριθμητική τιμή που εκ-‐
φράζει την αδρανειακή ροπή του στερεού σώματος ως προς αυτή την ευθεία. Συγκεκριμένα, θεωρώ-‐
ντας ένα μοναδιαίο διάνυσμα που ορίζει τη δεδομένη διανυσματική ευθεία προκύπτει η αδρανειακή
ροπή του στερεού σώματος ως προς αυτή την ευθεία:
I(ξ) = < ℑ(
ξ),ξ >, ||
ξ ||= 1.
Στα μοναδιαία διανύσματα της ορθοκανονικής βάσης του ευκλείδειου χώρου, άρα στους άξονες του
ευκλείδειου συστήματος αναφοράς, αποδίδονται οι αντίστοιχες αδρανειακές ροπές:
I(e1) = Ixx , I(
e2 ) = I yy , I(e3) = Izz .
Στα ιδιοδιανύσματα του τελεστή αδράνειας, άρα στους κύριους αδρανειακούς άξονες του στερεού
σώματος, αποδίδονται οι κύριες αδρανειακές ροπές:
I(ξ1) = I1 , I(
ξ2 ) = I2 , I(
ξ3) = I3 .
Τα ακρότατα της συνάρτησης αδρανειακής ροπής κάθε στερεού σώματος συμπίπτουν με τις ακραίες
κύριες αδρανειακές του ροπές:
I1 ≤ I(ξ) ≤ I3, ∀
ξ ∈3,
ξ ≠ 0 .
Οι κύριες αδρανειακές ροπές κάθε στερεού σώματος πληρούν τις ακόλουθες ανισωτικές σχέσεις και
η ισότητα ισχύει μόνο όταν η κατανομή της μάζας του είναι επίπεδη:
I1 ≤ I2 + I3, I2 ≤ I3 + I1, I3 ≤ I1 + I2 .
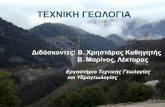
Συγκεκριμένα, στα στερεά σώματα με επίπεδη κατανομή μάζας, π.χ. όταν η μάζα είναι κατανεμημένη
στο επίπεδο συντεταγμένων Oxy του αδρανειακού συστήματος αναφοράς Oxyz, ισχύει η ισότητα: 9
Izz = Ixx + I yy .
Στερεό σώμα με επίπεδη κατανομή μάζας.
9 Η απόδειξη προκύπτει από τον απλό υπολογισμό:
Ixx + I yy = y2 dx dy
S
∫∫ + x2 dx dyS
∫∫ = (x2 + y2 )dx dyS
∫∫ = Izz .