Η ΔΥΝΑΜΙΚΗ ΤΟΥΕΠΙΧΕΙΡΗΜΑΤΙΚΟΥ ΠΕΔΙΟΥΕΠΑΓΓΕΛΜΑΤΙΚΕΣ ΑΝΑΓΚΕΣ ΚΑΙΝΕΕΣ ΕΥΚΑΙΡΙΕΣ
ΔΥΝΑΜΙΚΗ ΚΑΙ ΕΛΕΓΧΟΣ ΠΤΗΣΗΣ
ΠΑΡΑΡΤΗΜΑ:ΔΙΑΜΗΚΗΣ ΔΥΝΑΜΙΚΗ
ΕΠΙΛΥΣΗ ΕΞΙΣΩΣΕΩΝ ΚΙΝΗΣΗΣ
ΑΕΡΟΔΥΝΑΜΙΚΕΣ ΠΑΡΑΓΩΓΟΙ ΕΥΣΤΑΘΕΙΑΣ
ΠΡΟΣΟΜΟΙΩΣΗ ΣΤΟ MATLAB
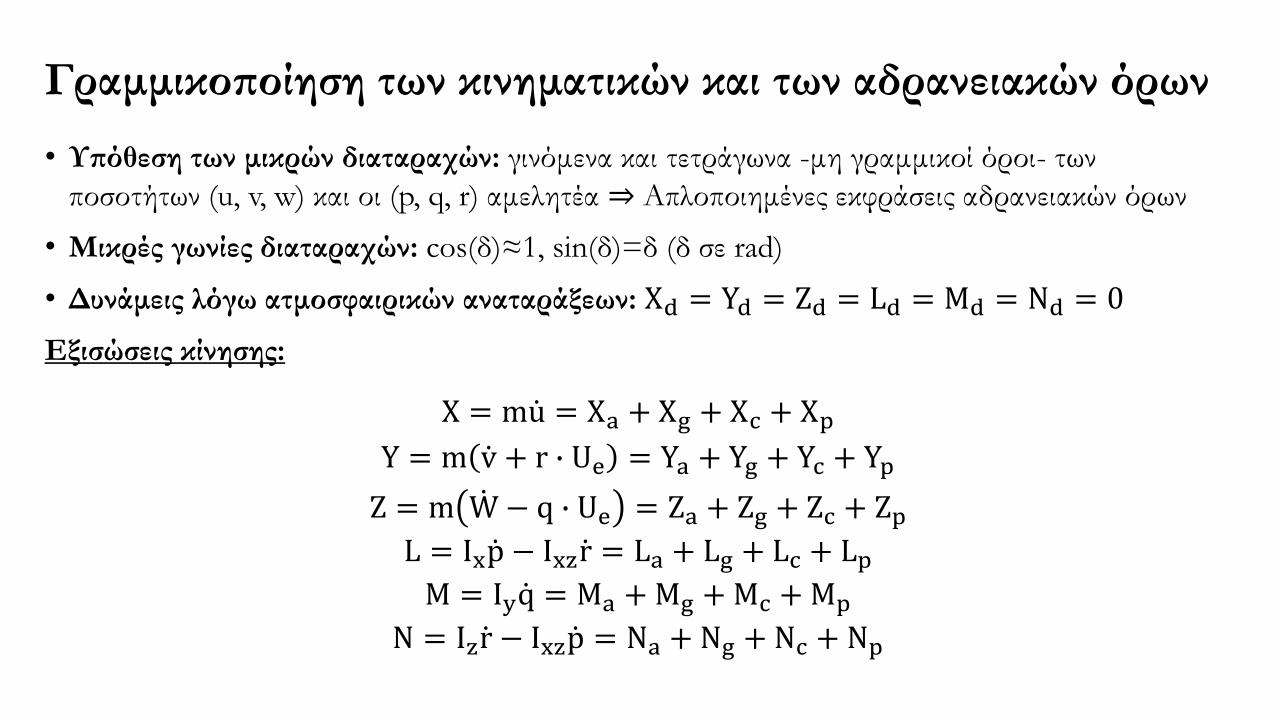
Γραμμικοποίηση των κινηματικών και των αδρανειακών όρων
• Υπόθεση των μικρών διαταραχών: γινόμενα και τετράγωνα -μη γραμμικοί όροι- των
ποσοτήτων (u, v, w) και οι (p, q, r) αμελητέα ⇒ Απλοποιημένες εκφράσεις αδρανειακών όρων
• Μικρές γωνίες διαταραχών: cos(δ)≈1, sin(δ)=δ (δ σε rad)
• Δυνάμεις λόγω ατμοσφαιρικών αναταράξεων: Xd = Yd = Zd = Ld = Md = Nd = 0
Εξισώσεις κίνησης:
X = m u = Xa + Xg + Xc + XpY = m v + r ∙ Ue = Ya + Yg + Yc + Yp
Z = m W − q ∙ Ue = Za + Zg + Zc + ZpL = Ix p − Ixz r = La + Lg + Lc + LpM = Iy q = Ma +Mg +Mc +Mp
N = Iz r − Ixz p = Na + Ng + Nc + Np
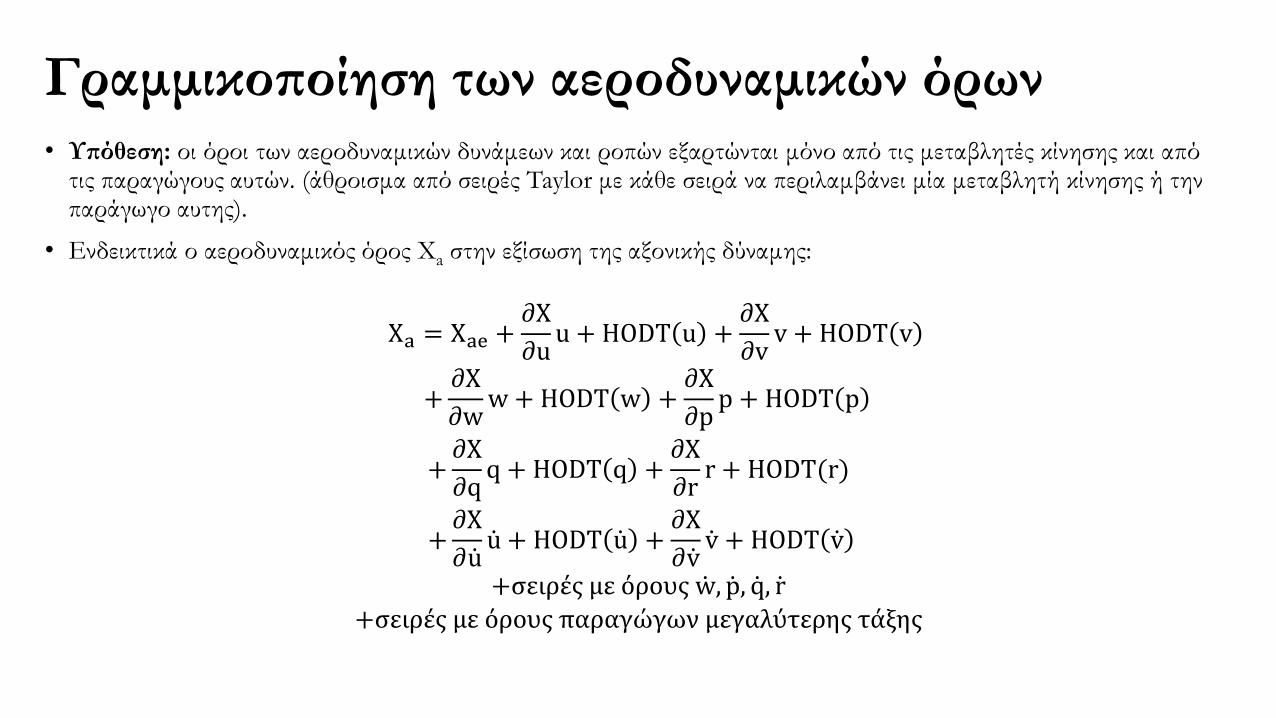
Γραμμικοποίηση των αεροδυναμικών όρων• Υπόθεση: οι όροι των αεροδυναμικών δυνάμεων και ροπών εξαρτώνται μόνο από τις μεταβλητές κίνησης και από
τις παραγώγους αυτών. (άθροισμα από σειρές Taylor με κάθε σειρά να περιλαμβάνει μία μεταβλητή κίνησης ή την παράγωγο αυτης).
• Ενδεικτικά ο αεροδυναμικός όρος Χa στην εξίσωση της αξονικής δύναμης:
Χa = Χae +𝜕X
𝜕uu + HODT u +
𝜕X
𝜕vv + HODT v
+𝜕X
𝜕ww + HODT w +
𝜕X
𝜕pp + HODT p
+𝜕X
𝜕qq + HODT q +
𝜕X
𝜕rr + HODT(r)
+𝜕X
𝜕 u u + HODT u +
𝜕X
𝜕 v v + HODT v
+σειρές με όρους w, p, q, r
+σειρές με όρους παραγώγων μεγαλύτερης τάξης
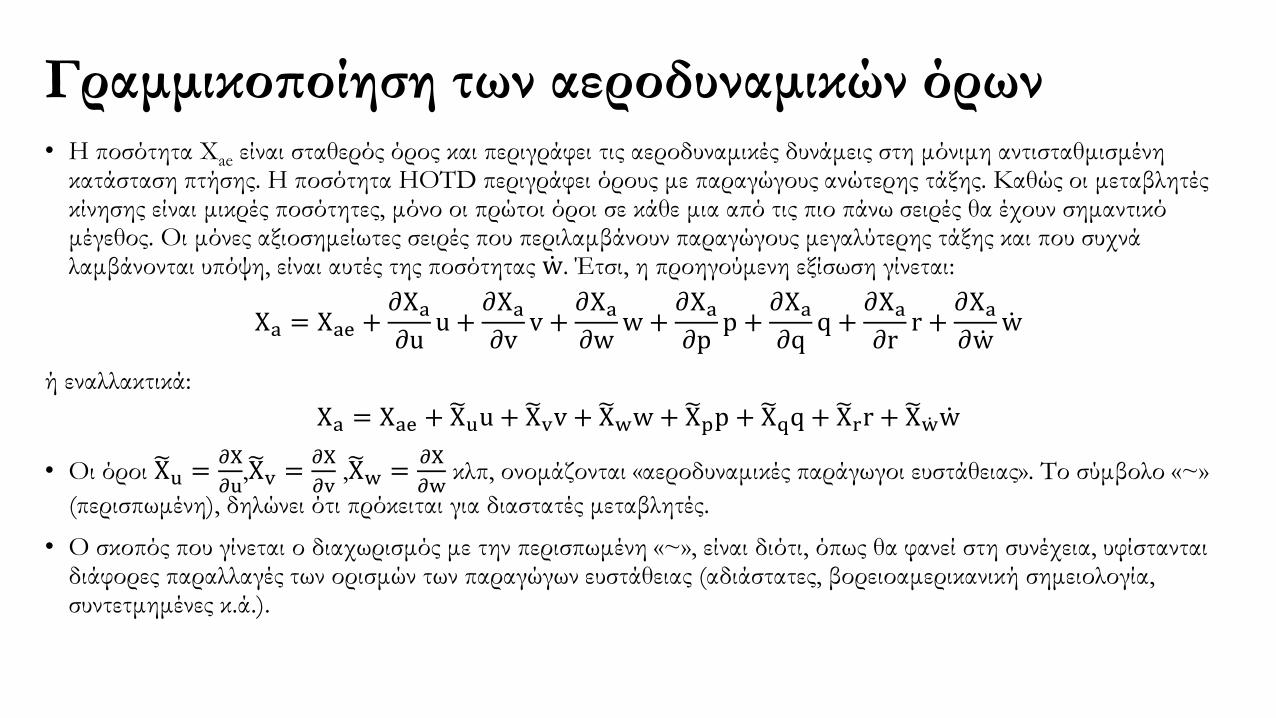
Γραμμικοποίηση των αεροδυναμικών όρων• Η ποσότητα Xae είναι σταθερός όρος και περιγράφει τις αεροδυναμικές δυνάμεις στη μόνιμη αντισταθμισμένη
κατάσταση πτήσης. Η ποσότητα ΗΟΤD περιγράφει όρους με παραγώγους ανώτερης τάξης. Καθώς οι μεταβλητές κίνησης είναι μικρές ποσότητες, μόνο οι πρώτοι όροι σε κάθε μια από τις πιο πάνω σειρές θα έχουν σημαντικό μέγεθος. Οι μόνες αξιοσημείωτες σειρές που περιλαμβάνουν παραγώγους μεγαλύτερης τάξης και που συχνά λαμβάνονται υπόψη, είναι αυτές της ποσότητας w. Έτσι, η προηγούμενη εξίσωση γίνεται:
Χa = Χae +𝜕Xa𝜕u
u +𝜕Xa𝜕v
v +𝜕Xa𝜕w
w +𝜕Xa𝜕p
p +𝜕Xa𝜕q
q +𝜕Xa𝜕r
r +𝜕Xa𝜕 w
w
ή εναλλακτικά:
Χa = Χae + Xuu + Xvv + Xww+ Xpp + Xqq + Xrr + X w w
• Οι όροι Xu =𝜕X
𝜕u, Xv =
𝜕X
𝜕v, Xw =
𝜕X
𝜕wκλπ, ονομάζονται «αεροδυναμικές παράγωγοι ευστάθειας». Το σύμβολο «~»
(περισπωμένη), δηλώνει ότι πρόκειται για διαστατές μεταβλητές.
• Ο σκοπός που γίνεται ο διαχωρισμός με την περισπωμένη «~», είναι διότι, όπως θα φανεί στη συνέχεια, υφίστανται διάφορες παραλλαγές των ορισμών των παραγώγων ευστάθειας (αδιάστατες, βορειοαμερικανική σημειολογία, συντετμημένες κ.ά.).
Οι γραμμικές συνιστώσες της βαρυτικής δύναμης
• Οι διαταραχές των δυνάμεων της βαρύτητας υπολογίζονται με τον ίδιο τρόπο που
χρησιμοποιήθηκε στις αδρανειακές δυνάμεις, εάν γραμμικοποιηθούν και οι βαρυτικές δυνάμεις.
Θεωρώντας ότι οι διαταραχές θ, φ είναι μικρές:XgYgZg
=
−mg sinΘe −mgθ cos Θemgψ sinΘe +mgφ cosΘemg cosΘe −mgθ sinΘe
• Επειδή η αρχή του σωματόδετου συστήματος ταυτίζεται με το κέντρο βάρους, δεν υφίσταται
ροπή λόγω κάποιας συνιστώσας του βάρους, ως προς οποιονδήποτε άξονα:
Lg = Mg = Ng = 0
Οι γραμμικοί όροι αεροδυναμικού ελέγχου και ισχύος
• Ο αεροδυναμικός έλεγχος πραγματοποιείται από το πηδάλιο ανόδου-καθόδου, τα πηδάλια κλίσης και το
πηδάλιο εκτροπής.
• Οι δυνάμεις και οι ροπές που δημιουργούνται από τις αποκλίσεις των πηδαλίων προκαλούνται ουσιαστικά
από τις μεταβολές στις αεροδυναμικές συνθήκες.
• Οι υποθέσεις που εφαρμόζονται στους αεροδυναμικούς όρους εφαρμόζονται επίσης και στους όρους
αεροδυναμικού ελέγχου. Για παράδειγμα η ροπή πρόνευσης λόγω του αεροδυναμικού ελέγχου προκύπτει:
Mc = Mce + Mδaδa + Mδeδe +
Mδrδr
• Η ισχύς και επομένως η ώση Τ, ελέγχεται από τη γωνία του μοχλού ελέγχου της ισχύος δp (μανέτα).
• Τα φαινόμενα αυτά περιγράφονται σε σχέση με τις παραγώγους ευστάθειας της ώσης του κινητήρα. Έτσι,
για παράδειγμα η οριζόντια δύναμη λόγω της ώσης μπορεί να εκφραστεί ως:
Xδp
= Xpe + Xδp
δp
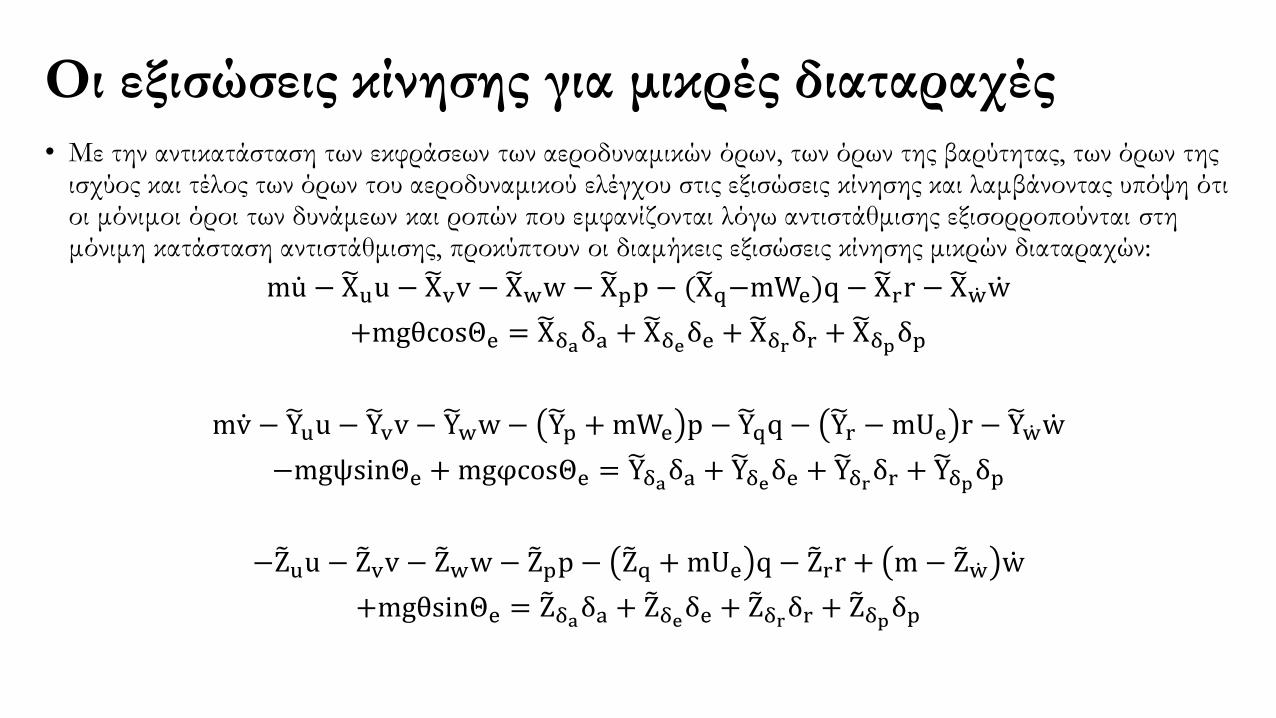
Οι εξισώσεις κίνησης για μικρές διαταραχές• Με την αντικατάσταση των εκφράσεων των αεροδυναμικών όρων, των όρων της βαρύτητας, των όρων της
ισχύος και τέλος των όρων του αεροδυναμικού ελέγχου στις εξισώσεις κίνησης και λαμβάνοντας υπόψη ότι οι μόνιμοι όροι των δυνάμεων και ροπών που εμφανίζονται λόγω αντιστάθμισης εξισορροπούνται στη μόνιμη κατάσταση αντιστάθμισης, προκύπτουν οι διαμήκεις εξισώσεις κίνησης μικρών διαταραχών:
m u − Xuu − Xvv − Xww− Xpp − ( Xq−mWe)q − Xrr − X w w
+mgθcosΘe = Xδaδa + Xδeδe +
Xδrδr + Xδpδp
m v − Yuu − Yvv − Yww− Yp +mWe p − Yqq − Yr −mUe r − Y w w
−mgψsinΘe +mgφcosΘe = Yδaδa + Yδeδe +
Yδrδr + Yδpδp
− Zuu − Zvv − Zww− Zpp − Zq +mUe q − Zrr + m − Z w w
+mgθsinΘe = Zδaδa + Zδeδe +
Zδrδr + Zδpδp
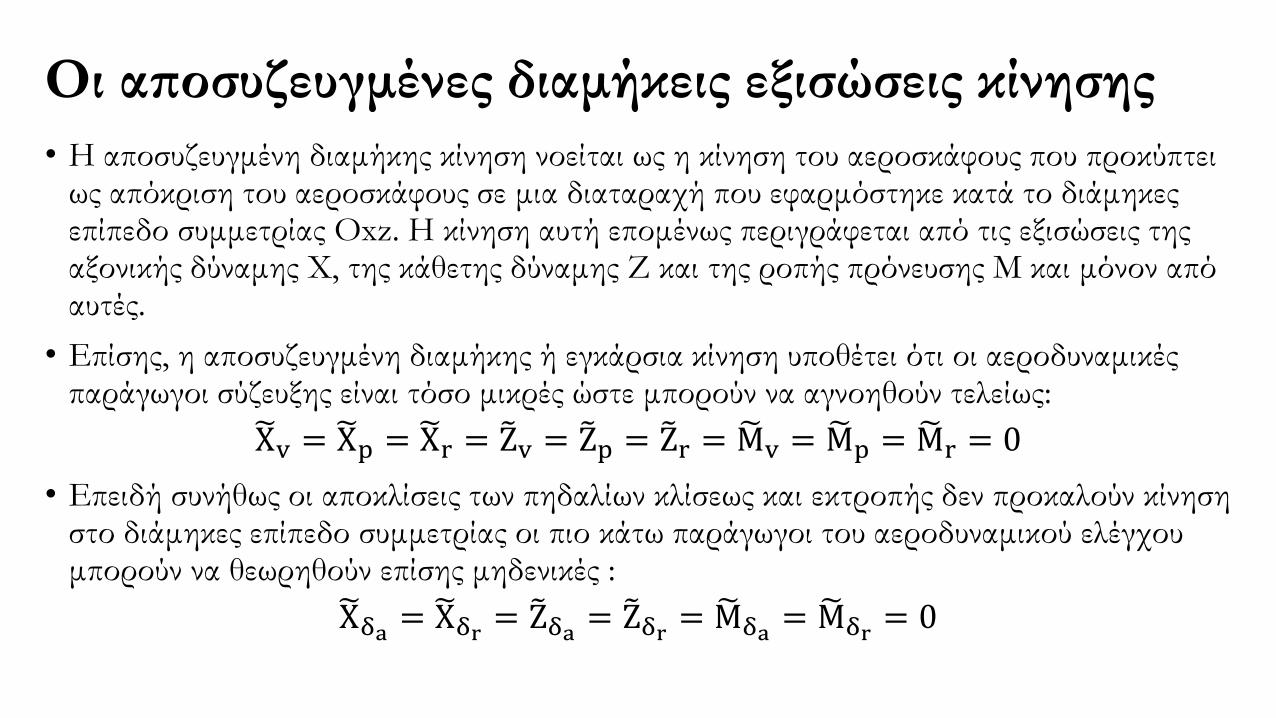
Οι αποσυζευγμένες διαμήκεις εξισώσεις κίνησης
• Η αποσυζευγμένη διαμήκης κίνηση νοείται ως η κίνηση του αεροσκάφους που προκύπτει ως απόκριση του αεροσκάφους σε μια διαταραχή που εφαρμόστηκε κατά το διάμηκες επίπεδο συμμετρίας Οxz. Η κίνηση αυτή επομένως περιγράφεται από τις εξισώσεις της αξονικής δύναμης X, της κάθετης δύναμης Z και της ροπής πρόνευσης M και μόνον από αυτές.
• Επίσης, η αποσυζευγμένη διαμήκης ή εγκάρσια κίνηση υποθέτει ότι οι αεροδυναμικές παράγωγοι σύζευξης είναι τόσο μικρές ώστε μπορούν να αγνοηθούν τελείως:
Xv = Xp = Xr = Zv = Zp = Zr = Mv = Mp = Mr = 0
• Επειδή συνήθως οι αποκλίσεις των πηδαλίων κλίσεως και εκτροπής δεν προκαλούν κίνηση στο διάμηκες επίπεδο συμμετρίας οι πιο κάτω παράγωγοι του αεροδυναμικού ελέγχου μπορούν να θεωρηθούν επίσης μηδενικές :
Xδa = Xδr =
Zδa = Zδr =
Mδa = Mδr = 0
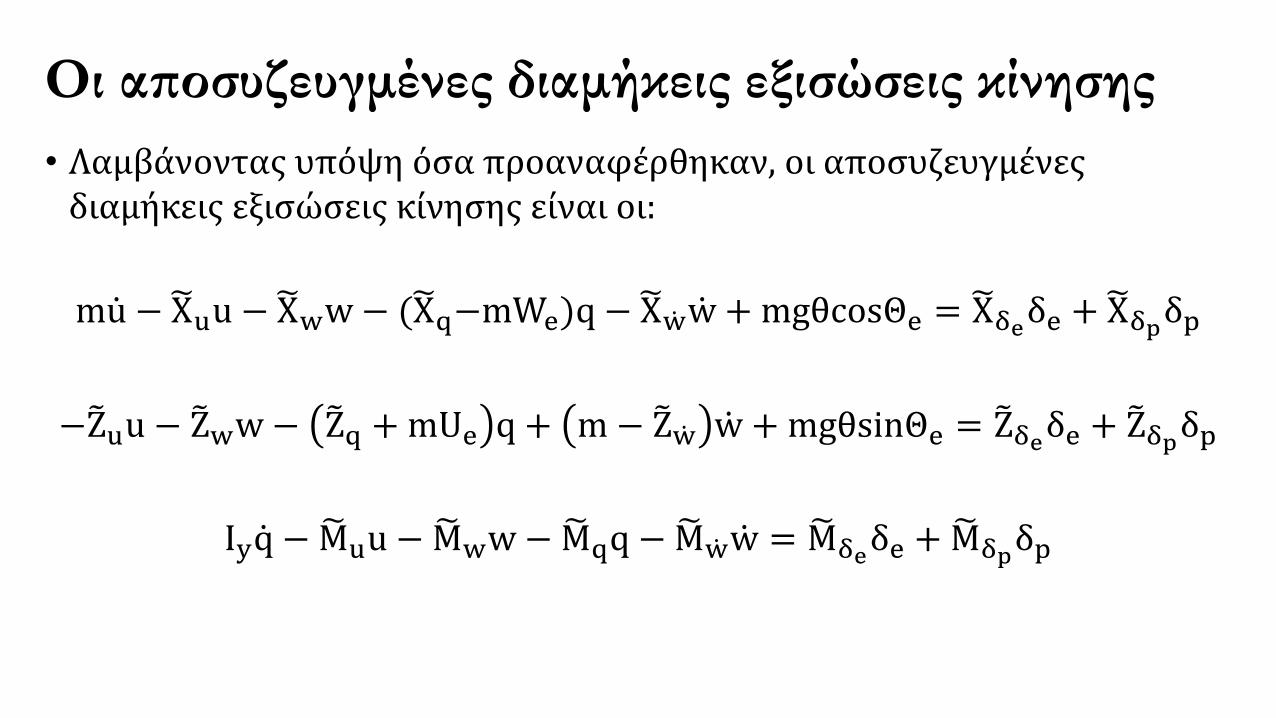
Οι αποσυζευγμένες διαμήκεις εξισώσεις κίνησης
• Λαμβάνοντας υπόψη όσα προαναφέρθηκαν, οι αποσυζευγμένες διαμήκεις εξισώσεις κίνησης είναι οι:
m u − Xuu − Xww− ( Xq−mWe)q − X w w + mgθcosΘe = Xδeδe + Xδpδp
− Zuu − Zww− Zq +mUe q + m − Z w w + mgθsinΘe = Zδeδe + Zδpδp
Iy q − Muu − Mww− Mqq − M w w = Mδeδe + Mδpδp
Μέθοδοι επίλυσης γραμμικών διαφορικών εξισώσεων
1) Συναρτήσεις μεταφοράς
2) Περιγραφή στον χώρο κατάστασης
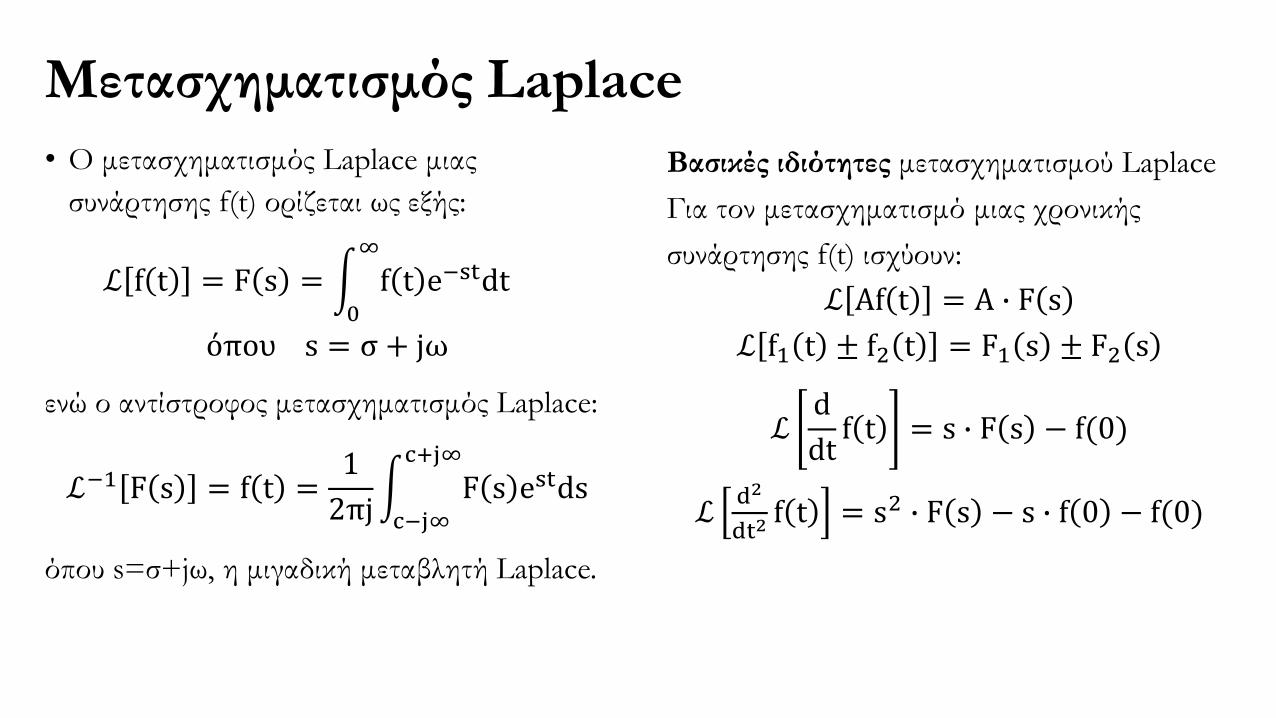
Μετασχηματισμός Laplace
• Ο μετασχηματισμός Laplace μιας
συνάρτησης f(t) ορίζεται ως εξής:
ℒ f t = F s = 0
∞
f t e−stdt
όπου s = σ + jω
ενώ ο αντίστροφος μετασχηματισμός Laplace:
ℒ−1 F s = f t =1
2πj c−j∞
c+j∞
F s estds
όπου s=σ+jω, η μιγαδική μεταβλητή Laplace.
Βασικές ιδιότητες μετασχηματισμού Laplace
Για τον μετασχηματισμό μιας χρονικής
συνάρτησης f(t) ισχύουν:
ℒ Af t = Α ∙ F s
ℒ f1 t ± f2 t = F1 s ± F2 s
ℒd
dtf t = s ∙ F s − f(0)
ℒd2
dt2f t = s2 ∙ F s − s ∙ f 0 − f(0)
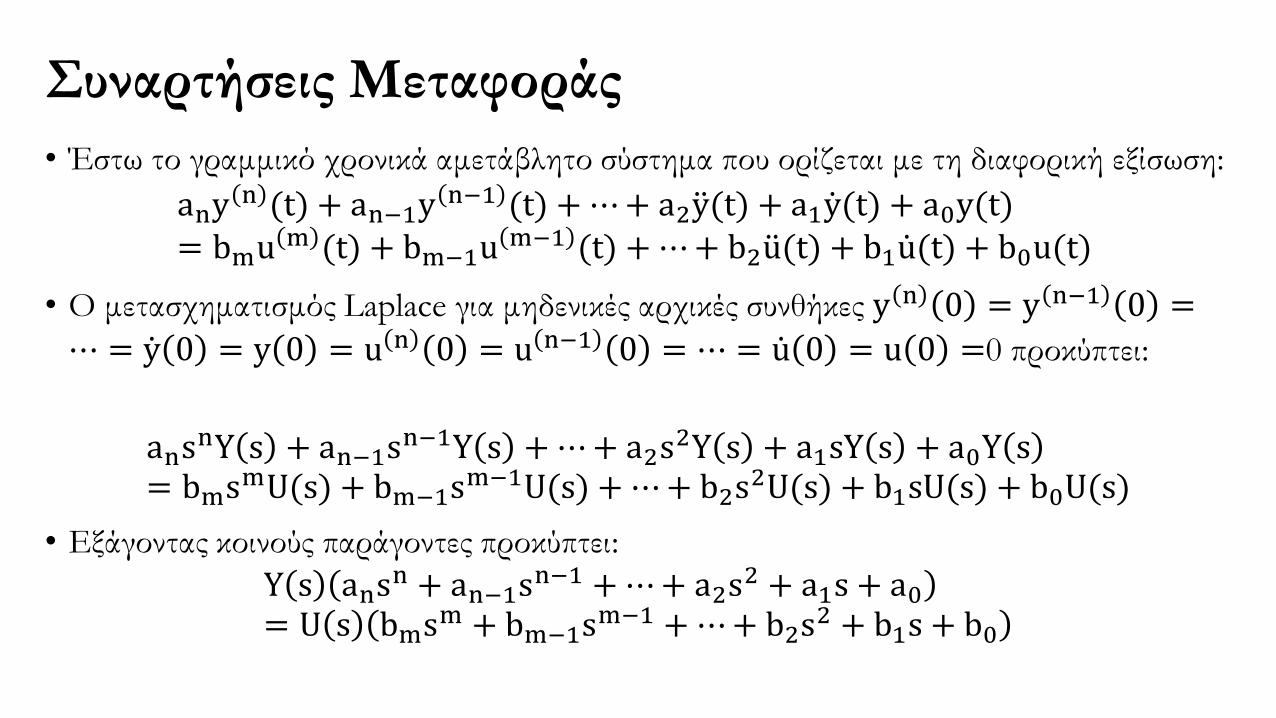
Συναρτήσεις Μεταφοράς
• Έστω το γραμμικό χρονικά αμετάβλητο σύστημα που ορίζεται με τη διαφορική εξίσωση:
anyn (t) + an−1y
n−1 (t) + ⋯+ a2 y(t) + a1 y(t) + a0y(t)= bmu
m (t) + bm−1um−1 (t) + ⋯+ b2 u(t) + b1 u(t) + b0u(t)
• Ο μετασχηματισμός Laplace για μηδενικές αρχικές συνθήκες y n 0 = y n−1 0 =
⋯ = y 0 = y 0 = u n 0 = u n−1 0 = ⋯ = u 0 = u 0 =0 προκύπτει:
ansnY s + an−1s
n−1Y s +⋯+ a2s2Y s + a1sY s + a0Y s
= bmsmU(s) + bm−1s
m−1U(s) + ⋯+ b2s2U(s) + b1sU(s) + b0U(s)
• Εξάγοντας κοινούς παράγοντες προκύπτει:
Y s ansn + an−1s
n−1 +⋯+ a2s2 + a1s + a0
= U s bmsm + bm−1s
m−1 +⋯+ b2s2 + b1s + b0
Συναρτήσεις Μεταφοράς• Τότε η συνάρτηση μεταφοράς είναι:
G s =Y s
U s=bms
m + bm−1sm−1 +⋯+ b2s
2 + b1s + b0ans
n + an−1sn−1 +⋯+ a2s
2 + a1s + a0=K s − z1 s − z2 … s − zms − p1 s − p2 … s − pn
όπου Κ: κέρδος
• Η συνάρτηση μεταφοράς είναι ο λόγος του μετασχηματισμού Laplace της συνάρτησης εξόδου προς τον μετασχηματισμό
της συνάρτησης εισόδου και εκφράζει τις ιδιότητες του συστήματος, ανεξάρτητα από τη συνάρτηση εισόδου.
• Η χαρακτηριστική εξίσωση ορίζεται εξισώνοντας τον παρονομαστή της ΣΜ με το μηδέν:
ansn + an−1s
n−1 +⋯+ a2s2 + a1s + a0 = s − p1 s − p2 … s − pn = 0
Οι n ρίζες της χαρακτηριστικής εξίσωσης –δηλαδή του πολυωνύμου του παρονομαστή- ονομάζονται πόλοι του συστήματος.
• Εξισώνοντας τον αριθμητή της ΣΜ με το μηδέν:
bmsm + bm−1s
m−1 +⋯+ b2s2 + b1s + b0 = s − z1 s − z2 … s − zm = 0
Προκύπτουν οι m ρίζες του πολυωνύμου του αριθμητή της συνάρτησης μεταφοράς, οι οποίες ονομάζονται μηδενιστές του
συστήματος.
Κανόνας του Cramer• Ο κανόνας του Cramer, είναι μια μέθοδος ταυτόχρονης
επίλυσης ενός σετ γραμμικών αλγεβρικών εξισώσεων. Το
σύστημα γράφεται στη μορφή:
𝐀n×n 𝐱 = 𝐲
όπου
x, y: διανύσματα μεταβλητών (n x 1),
Α: πίνακας συντελεστών.
• Τότε:
x1x2…xn
= 𝚨−𝟏
y1y2…yn
=adj 𝐀
det 𝐀
y1y2…yn
adj 𝐀 = 𝐂𝐓 όπου Cij = −1 i+jMij
det 𝐀 = A11M11 − A12M12 +⋯± A1nM1n
Άρα για κάποιο στοιχείο i του διανύσματος 𝐱:
xi =M1iy1 +M2iy2 +⋯+Mniyn
A11M11 − A12M12 +⋯± A1nM1n
i = 1,2, … , nόπου
• Aij: στοιχείο του πίνακα Α στη γραμμή i , στήλη j,
• Mij: υποορίζουσες πίνακα Α (Ορίζουσα του
υποπίνακα που δημιουργείται αν διαγραφεί η
γραμμή i και η στήλη j).
Δηλαδή καταλήγει στον υπολογισμό n υποοριζουσών
για κάθε στοιχείο i του διανύσματος x, ενώ πρέπει να
δίνεται ιδιαίτερη προσοχή στα πρόσημά τους ανάλογα
με το άθροισμα (i + j).
Εξαγωγή Διαμηκών ΣΜ
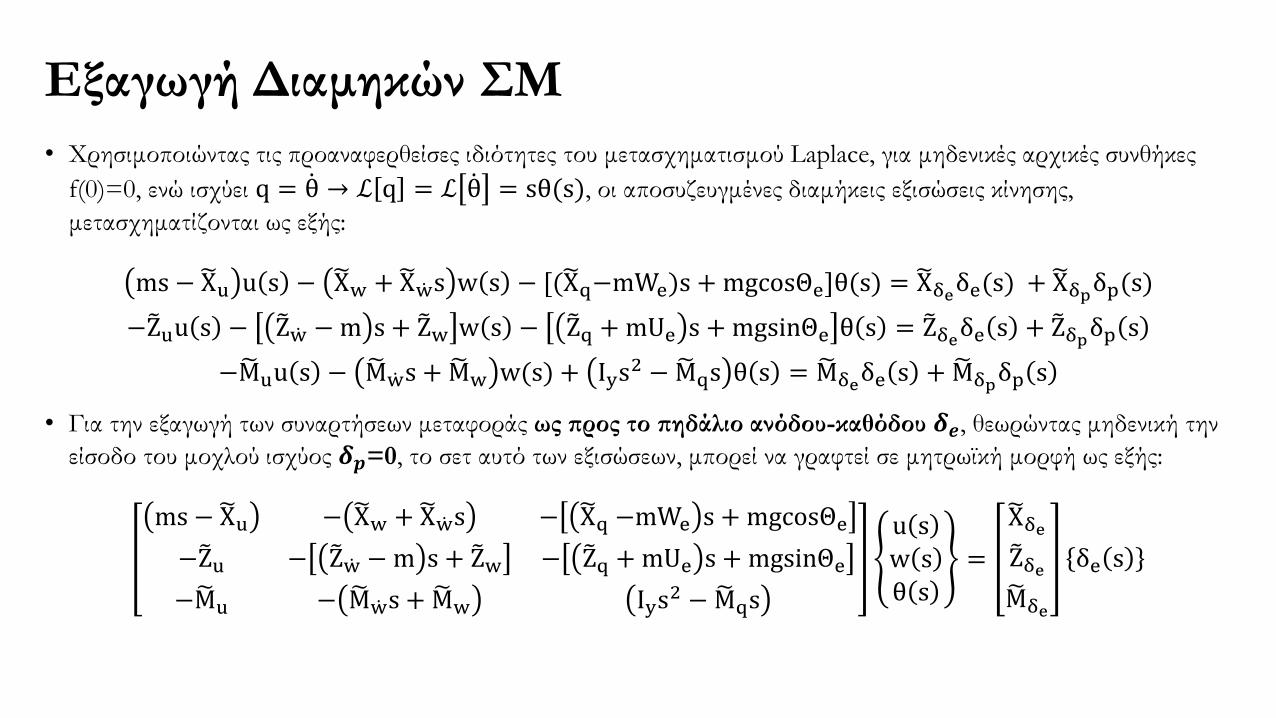
• Χρησιμοποιώντας τις προαναφερθείσες ιδιότητες του μετασχηματισμού Laplace, για μηδενικές αρχικές συνθήκες
f(0)=0, ενώ ισχύει q = θ → ℒ q = ℒ θ = sθ(s), οι αποσυζευγμένες διαμήκεις εξισώσεις κίνησης,
μετασχηματίζονται ως εξής:
ms − Xu u s − Xw + X ws w s − [( Xq−mWe)s + mgcosΘe]θ(s) = Xδeδe(s) + Xδpδp(s)
− Zuu s − Z w −m s + Zw w s − Zq +mUe s + mgsinΘe θ s = Zδeδe s + Zδpδp s
− Muu s − M ws + Mw w(s) + Iys2 − Mqs θ s = Mδeδe s + Mδpδp s
• Για την εξαγωγή των συναρτήσεων μεταφοράς ως προς το πηδάλιο ανόδου-καθόδου 𝜹𝒆, θεωρώντας μηδενική την
είσοδο του μοχλού ισχύος 𝜹𝒑=0, το σετ αυτό των εξισώσεων, μπορεί να γραφτεί σε μητρωϊκή μορφή ως εξής:
ms − Xu − Xw + X ws − Xq −mWe s + mgcosΘe
− Zu − Z w −m s + Zw − Zq +mUe s + mgsinΘe
− Mu − M ws + Mw Iys2 − Mqs
u sw sθ s
=
Xδe Zδe Mδe
δe s
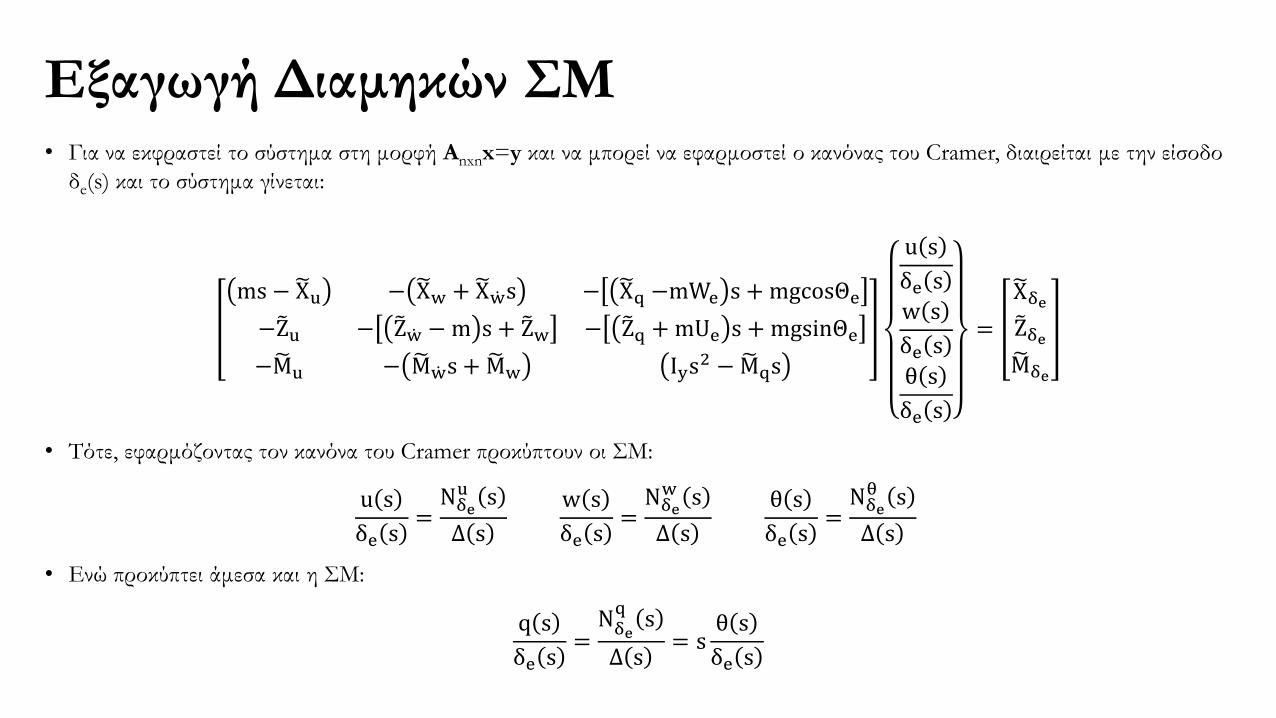
Εξαγωγή Διαμηκών ΣΜ• Για να εκφραστεί το σύστημα στη μορφή Αnxnx=y και να μπορεί να εφαρμοστεί ο κανόνας του Cramer, διαιρείται με την είσοδο
δe(s) και το σύστημα γίνεται:
ms − Xu − Xw + X ws − Xq −mWe s + mgcosΘe
− Zu − Z w −m s + Zw − Zq +mUe s + mgsinΘe
− Mu − M ws + Mw Iys2 − Mqs
u s
δe s
w s
δe s
θ s
δe s
=
Xδe Zδe Mδe
• Τότε, εφαρμόζοντας τον κανόνα του Cramer προκύπτουν οι ΣΜ:
u s
δe s=Nδeu s
Δ s
w s
δe s=Nδew s
Δ s
θ s
δe s=Nδeθ s
Δ s
• Ενώ προκύπτει άμεσα και η ΣΜ:
q s
δe s=Nδeq
s
Δ s= s
θ s
δe s
Εξαγωγή Διαμηκών ΣΜ
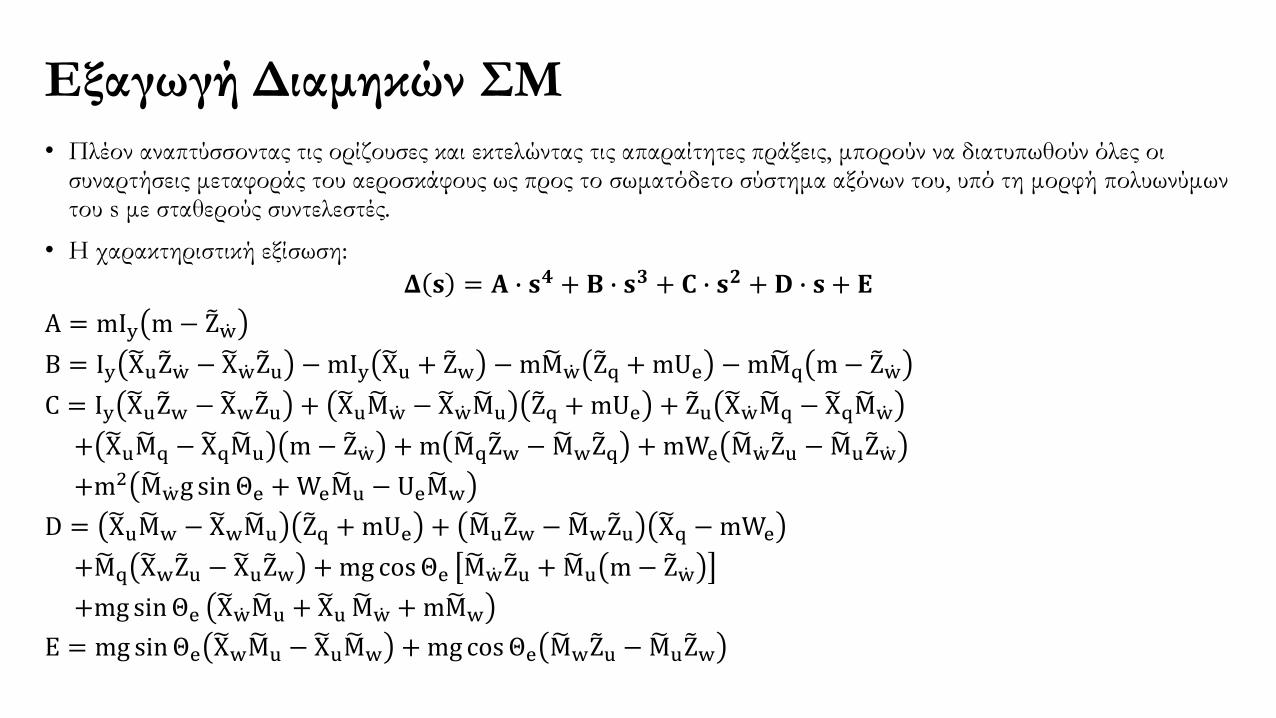
• Πλέον αναπτύσσοντας τις ορίζουσες και εκτελώντας τις απαραίτητες πράξεις, μπορούν να διατυπωθούν όλες οι συναρτήσεις μεταφοράς του αεροσκάφους ως προς το σωματόδετο σύστημα αξόνων του, υπό τη μορφή πολυωνύμων του s με σταθερούς συντελεστές.
• Η χαρακτηριστική εξίσωση:
𝚫 𝐬 = 𝚨 ∙ 𝐬𝟒 + 𝚩 ∙ 𝐬𝟑 + 𝐂 ∙ 𝐬𝟐 + 𝐃 ∙ 𝐬 + 𝚬
A = mIy m− Z w
B = Iy Xu Z w − X w Zu −mIy Xu + Zw −m M w
Zq +mUe −m Mq m− Z w
C = Iy Xu Zw − Xw Zu + Xu M w − X w Mu
Zq +mUe + Zu X w Mq − Xq M w
+ Xu Mq − Xq Mu m− Z w +m Mq Zw − Mw
Zq +mWe M w
Zu − Mu Z w
+m2 M wg sinΘe +We Mu − Ue Mw
D = Xu Mw − Xw Mu Zq +mUe + Mu
Zw − Mw Zu Xq −mWe
+ Mq Xw Zu − Xu Zw +mg cosΘe M w
Zu + Mu m− Z w
+mgsinΘe X w Mu + Xu M w +m Mw
E = mg sinΘe Xw Mu − Xu Mw +mgcosΘe Mw Zu − Mu
Zw
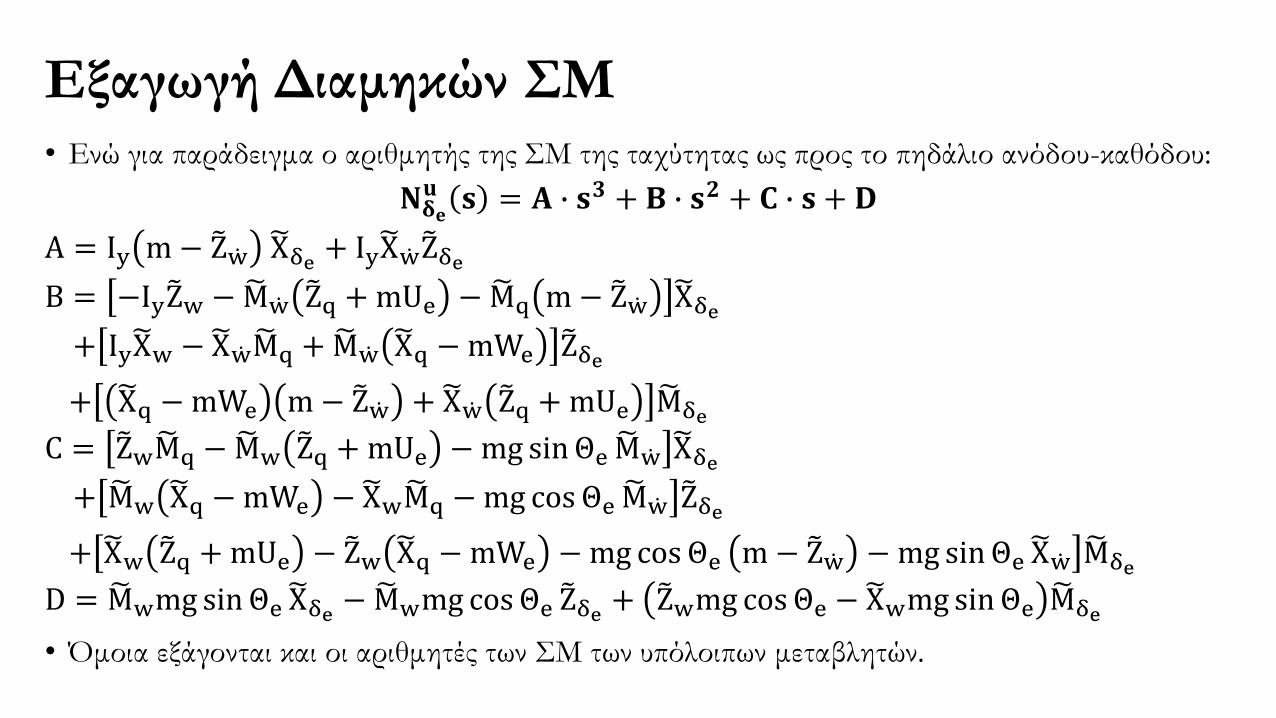
Εξαγωγή Διαμηκών ΣΜ• Ενώ για παράδειγμα ο αριθμητής της ΣΜ της ταχύτητας ως προς το πηδάλιο ανόδου-καθόδου:
𝐍𝛅𝐞𝐮 𝐬 = 𝚨 ∙ 𝐬𝟑 + 𝐁 ∙ 𝐬𝟐 + 𝐂 ∙ 𝐬 + 𝐃
A = Iy m− Z w Xδe + Iy X w
ZδeB = −Iy Zw − M w
Zq +mUe − Mq m− Z w Xδe
+ Iy Xw − X w Mq + M w
Xq −mWe Zδe
+ Xq −mWe m− Z w + X w Zq +mUe Mδe
C = Zw Mq − Mw Zq +mUe −mg sinΘe M w
Xδe+ Mw
Xq −mWe − Xw Mq −mg cos Θe M w Zδe
+ Xw Zq +mUe − Zw Xq −mWe −mg cos Θe m− Z w −mg sinΘe X w Mδe
D = Mwmg sinΘe Xδe − Mwmg cosΘe Zδe +
Zwmg cosΘe − Xwmg sinΘe Mδe
• Όμοια εξάγονται και οι αριθμητές των ΣΜ των υπόλοιπων μεταβλητών.
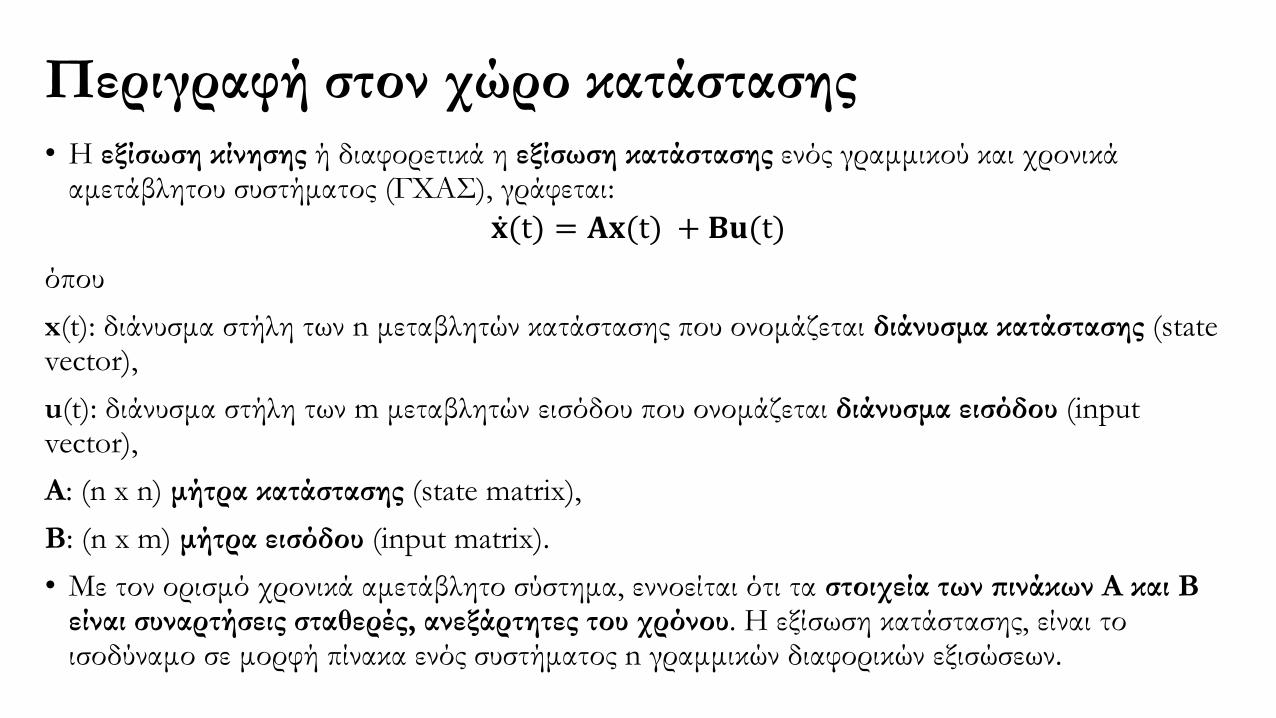
Περιγραφή στον χώρο κατάστασης• Η εξίσωση κίνησης ή διαφορετικά η εξίσωση κατάστασης ενός γραμμικού και χρονικά
αμετάβλητου συστήματος (ΓΧΑΣ), γράφεται:
𝐱(t) = 𝐀𝐱(t) + 𝐁𝐮(t)
όπου
x(t): διάνυσμα στήλη των n μεταβλητών κατάστασης που ονομάζεται διάνυσμα κατάστασης (state vector),
u(t): διάνυσμα στήλη των m μεταβλητών εισόδου που ονομάζεται διάνυσμα εισόδου (input vector),
A: (n x n) μήτρα κατάστασης (state matrix),
B: (n x m) μήτρα εισόδου (input matrix).
• Με τον ορισμό χρονικά αμετάβλητο σύστημα, εννοείται ότι τα στοιχεία των πινάκων Α και Β είναι συναρτήσεις σταθερές, ανεξάρτητες του χρόνου. Η εξίσωση κατάστασης, είναι το ισοδύναμο σε μορφή πίνακα ενός συστήματος n γραμμικών διαφορικών εξισώσεων.
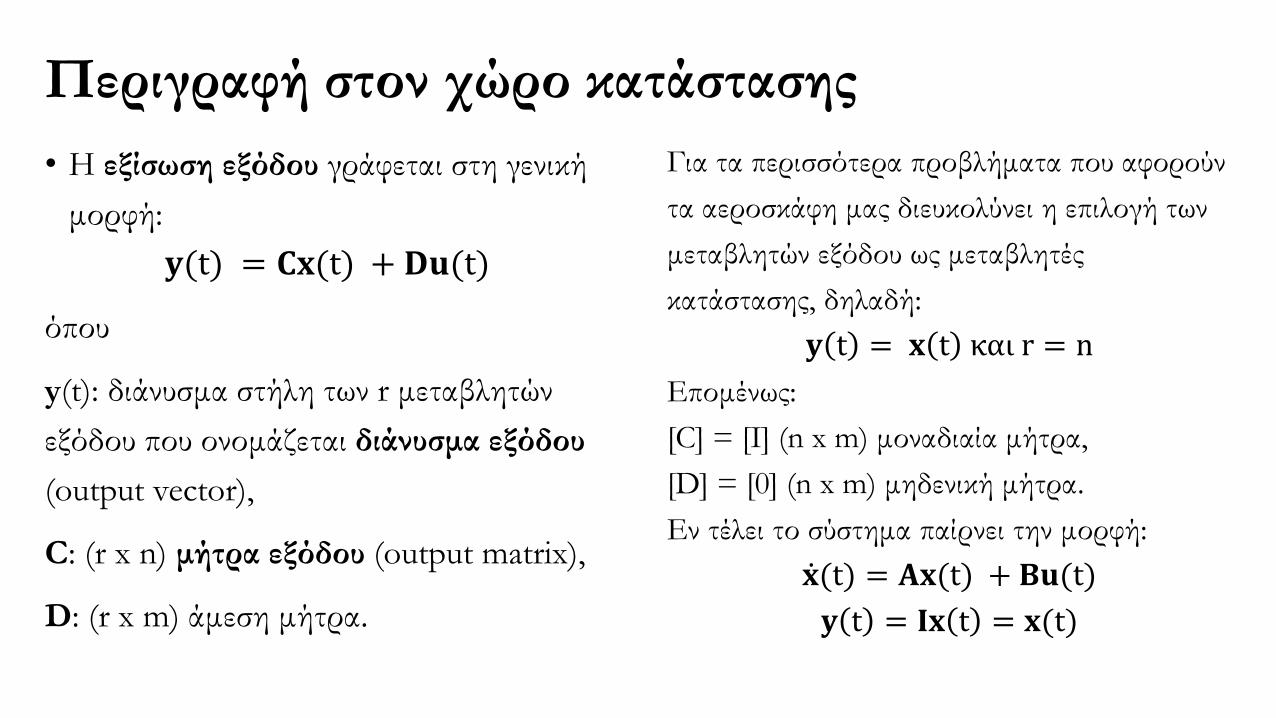
Περιγραφή στον χώρο κατάστασης
• Η εξίσωση εξόδου γράφεται στη γενική
μορφή:
𝐲(t) = 𝐂𝐱(t) + 𝐃𝐮(t)
όπου
y(t): διάνυσμα στήλη των r μεταβλητών
εξόδου που ονομάζεται διάνυσμα εξόδου
(output vector),
C: (r x n) μήτρα εξόδου (output matrix),
D: (r x m) άμεση μήτρα.
Για τα περισσότερα προβλήματα που αφορούν
τα αεροσκάφη μας διευκολύνει η επιλογή των
μεταβλητών εξόδου ως μεταβλητές
κατάστασης, δηλαδή:
𝐲 t = 𝐱 t και r = n
Επομένως:
[C] = [I] (n x m) μοναδιαία μήτρα,
[D] = [0] (n x m) μηδενική μήτρα.
Εν τέλει το σύστημα παίρνει την μορφή:
𝐱(t) = 𝐀𝐱(t) + 𝐁𝐮(t)
𝐲 t = 𝐈𝐱 t = 𝐱(t)
Περιγραφή στον χώρο κατάστασης
• Εκτελώντας τον μετασχηματισμό Laplace στην εξίσωση κατάστασης, λαμβάνεται το
σύστημα αλγεβρικών εξισώσεων:
s 𝐱 t = 𝐀𝐗 s + 𝐁𝐔 s ⇒ s𝐈 − 𝐀 𝐗(s) = 𝐁𝐔(s)
• Η χαρακτηριστική εξίσωση του συστήματος προκύπτει ως εξής:
Det s𝐈 − 𝐀 = s − λ1 s − λ2 … s − λn = 0
• Οι ρίζες λ1,λ2,...,λn της χαρακτηριστικής εξίσωσης ονομάζονται ιδιοτιμές του πίνακα Α
ή πόλοι του συστήματος. Οι πόλοι ενός συστήματος, δηλαδή οι ιδιοτιμές καθορίζουν
την ευστάθεια ή/και τη συμπεριφορά και μεταβατική απόκριση του.
Ιδιοδιανυσματική Ανάλυση
• Ο υπολογισμός των ιδιοδιανυσμάτων προκύπτει από τη σχέση:
−λn𝐈 + 𝚨 𝚽n = 0
όπου για κάθε ιδιοτιμή λn υπάρχει ένα ιδιοδιάνυσμα Φn:
𝚽n =
Φ1n
Φ2n
…Φnn
και Φ1n, Φ2n, … ,Φnn εξαρτώμενες μεταξύ τους τιμές
• Ο πίνακας ιδιοδιανυσμάτων του οποίου η κάθε στήλη είναι το Φn της λn ιδιοτιμής:
𝐕 =
Φ11
Φ21
…Φn1
Φ12
Φ22
…Φn2
…………
Φ1n
Φ2n
…Φnn
Ιδιοδιανυσματική Ανάλυση
• Έστω σταθερός πίνακας Αnxn με
διακεκριμένες ιδιοτιμές λ1,λ2,....,λn και
πίνακα ιδιοδιανυσμάτων Vnxn. Ισχύει:
𝚲nxn = 𝐕−1 ∙ 𝐀 ∙ 𝐕
όπου Λnxn ο διαγώνιος πίνακας των
ιδιοτιμών:
𝚲n×n =
λ1 0 0 0 00 λ2 0 0 0… … … … …0 0 0 λn−1 00 0 0 0 λn
• Τότε πολλαπλασιάζοντας κατάλληλα δεξιά
και αριστερά, προκύπτει:
𝚨nxn = 𝐕 ∙ 𝚲 ∙ 𝐕−1
⇒ e𝐀t = 𝐕 ∙ e𝚲t ∙ 𝐕−1
όπου eΛt ο εκθετικός πίνακας:
e𝚲t =
eλ1t 0 0 0 00 eλ2t 0 0 0… … … … …0 0 0 eλn−1t 00 0 0 0 eλnt
Ιδιοδιανυσματική Ανάλυση
• Θέτοντας:
𝐕−1 =−𝐰1
T −⋮
− 𝐰nT −
• Η λύση της ομογενούς 𝐱 = 𝐀𝐱 με x(0) γνωστό:
𝐱 t = e𝐀t𝐱 0 =
i=1
n
eλit𝚽i𝐰iT𝐱 0
⇒ 𝐱 t =
i=1
n
eλit𝚽i𝛃i
Για αυτή τη μορφή της λύσης:
• eλit: καθορίζει τη μορφή της χρονικής
απόκρισης.
• Φi: καθορίζει το μέγεθος της συνεισφοράς
της κάθε κατάστασης στη μορφή της
απόκρισης.
• βi: καθορίζει το μέγεθος της διέγερσης της
μορφής λόγω της αρχικής συνθήκης.
Ενώ ανάλογα με τη μορφή της ιδιοτιμής:
• λi πραγματική: αύξουσα ή φθίνουσα
εκθετική απόκριση,
• λi μιγαδική: αύξουσα ή φθίνουσα
αποσβενόμενη εκθετική ημιτονοειδής
απόκριση.
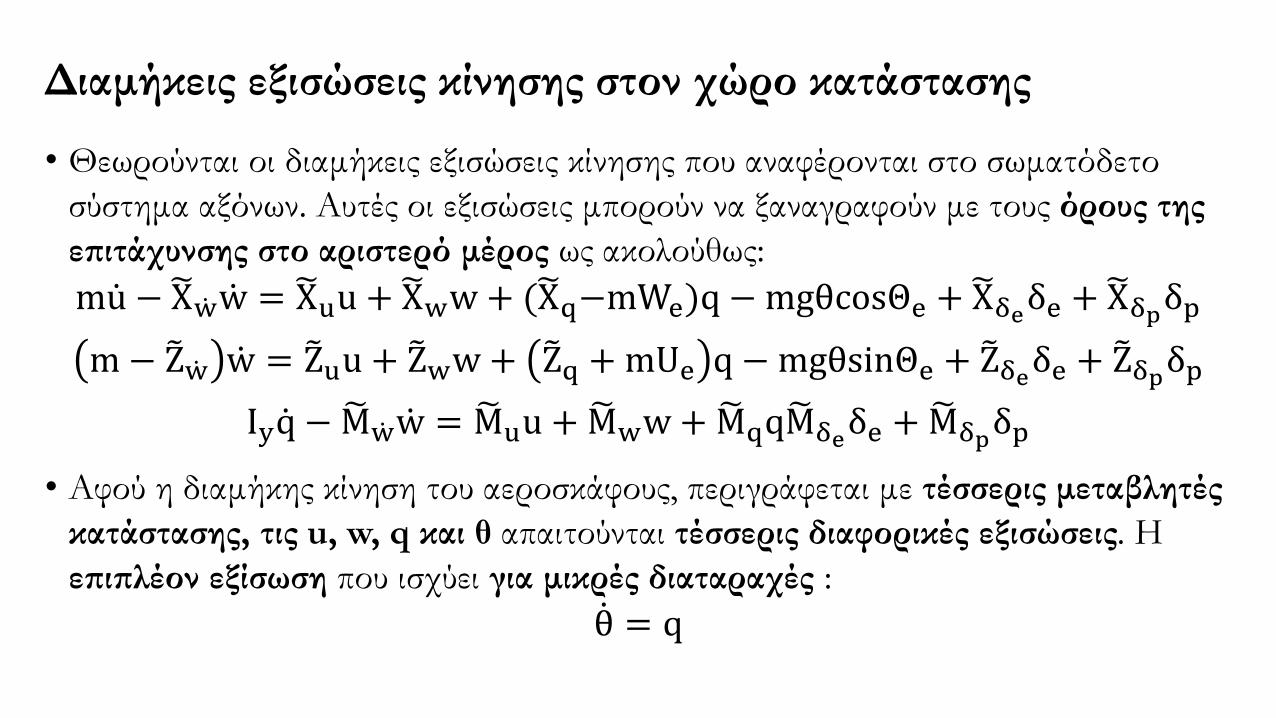
Διαμήκεις εξισώσεις κίνησης στον χώρο κατάστασης
• Θεωρούνται οι διαμήκεις εξισώσεις κίνησης που αναφέρονται στο σωματόδετο
σύστημα αξόνων. Αυτές οι εξισώσεις μπορούν να ξαναγραφούν με τους όρους της
επιτάχυνσης στο αριστερό μέρος ως ακολούθως:
m u − X w w = Xuu + Xww+ ( Xq−mWe)q − mgθcosΘe + Xδeδe + Xδpδp
m− Z w w = Zuu + Zww+ Zq +mUe q − mgθsinΘe + Zδeδe + Zδpδp
Iy q − M w w = Muu + Mww+ Mqq Mδeδe + Mδpδp
• Αφού η διαμήκης κίνηση του αεροσκάφους, περιγράφεται με τέσσερις μεταβλητές
κατάστασης, τις u, w, q και θ απαιτούνται τέσσερις διαφορικές εξισώσεις. Η
επιπλέον εξίσωση που ισχύει για μικρές διαταραχές : θ = q

Διαμήκεις εξισώσεις κίνησης στον χώρο κατάστασης
• Οι τέσσερις προηγούμενες εξισώσεις, μπορούν να συνδυαστούν και να γραφούν στη μορφή μιας διανυσματικής-
μητρικής διαφορικής εξίσωσης ως εξής:
𝐌 𝐱 t = 𝐀′ 𝐱 t + 𝐁′ 𝐮 tόπου
𝐱 t =
uwqθ
και 𝐮 t =δeδp
• Οι πίνακες των συντελεστών για τις διαμήκεις εξισώσεις κίνησης M, A και Β, είναι:
𝐌 =
m − X w 0 0
0 m− Z w 0 0
0 − M w Iy 0
0 0 0 1
𝐀′ =
Xu Xw Xq −mWe −mgcosΘe Zu Zw Zq +mUe −mgsinΘe Mu
Mw Mq 0
0 0 1 0
𝐁′ =
Xδe Xδp
Zδe Zδp
Mδe Mδp
0 0
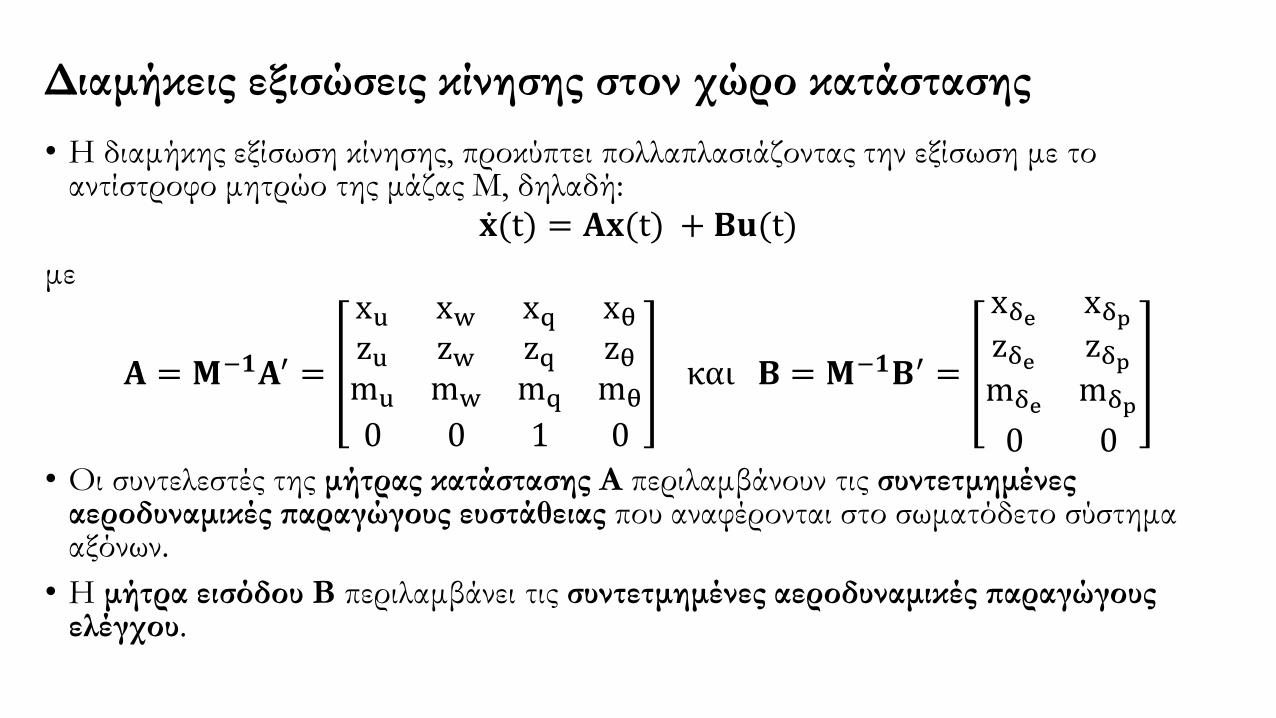
Διαμήκεις εξισώσεις κίνησης στον χώρο κατάστασης
• Η διαμήκης εξίσωση κίνησης, προκύπτει πολλαπλασιάζοντας την εξίσωση με το αντίστροφο μητρώο της μάζας Μ, δηλαδή:
𝐱(t) = 𝐀𝐱(t) + 𝐁𝐮(t)
με
𝐀 = 𝚳−𝟏𝚨′ =
xu xw xq xθzu zw zq zθmu mw mq mθ
0 0 1 0
και 𝐁 = 𝐌−𝟏𝐁′ =
xδe xδpzδe zδpmδe mδp
0 0• Οι συντελεστές της μήτρας κατάστασης Α περιλαμβάνουν τις συντετμημένες
αεροδυναμικές παραγώγους ευστάθειας που αναφέρονται στο σωματόδετο σύστημα αξόνων.
• Η μήτρα εισόδου Β περιλαμβάνει τις συντετμημένες αεροδυναμικές παραγώγους ελέγχου.
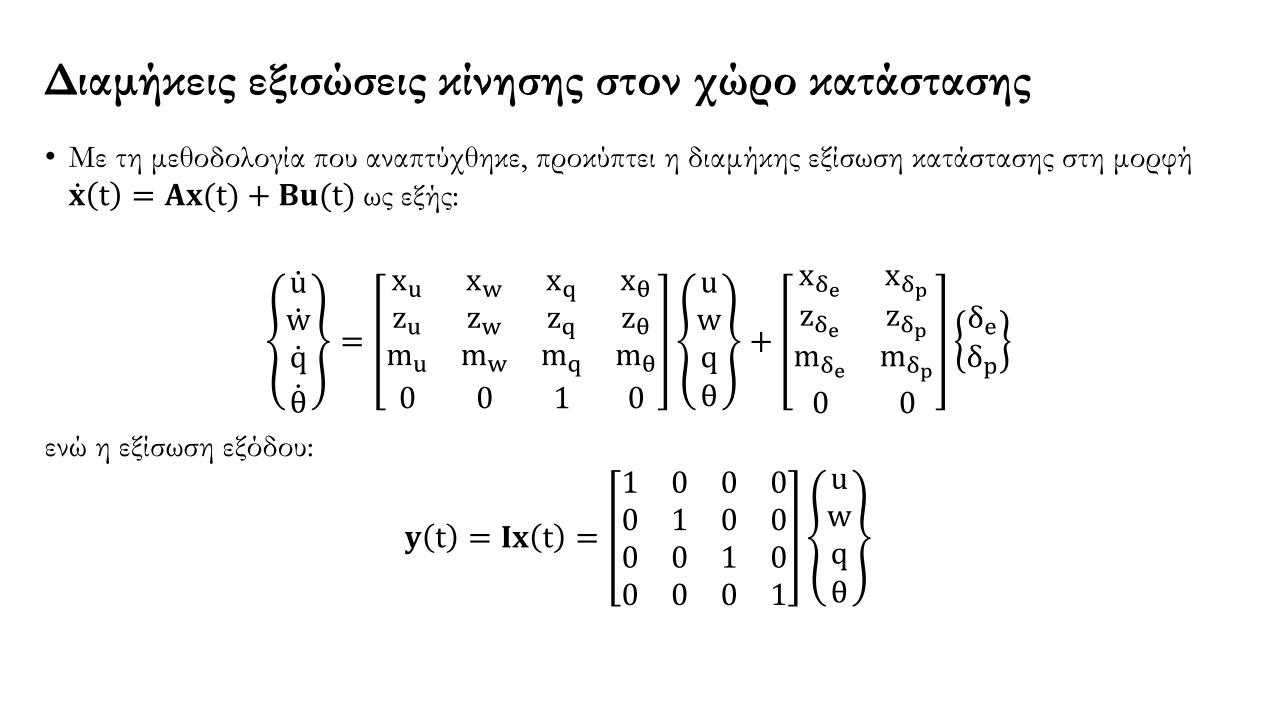
Διαμήκεις εξισώσεις κίνησης στον χώρο κατάστασης
• Με τη μεθοδολογία που αναπτύχθηκε, προκύπτει η διαμήκης εξίσωση κατάστασης στη μορφή
𝐱 t = 𝐀𝐱(t) + 𝐁𝐮(t) ως εξής:
u w q θ
=
xu xw xq xθzu zw zq zθmu mw mq mθ
0 0 1 0
uwqθ
+
xδe xδpzδe zδpmδe mδp
0 0
δeδp
ενώ η εξίσωση εξόδου:
𝐲 t = 𝐈𝐱 t =
1 0 0 00 1 0 00 0 1 00 0 0 1
uwqθ
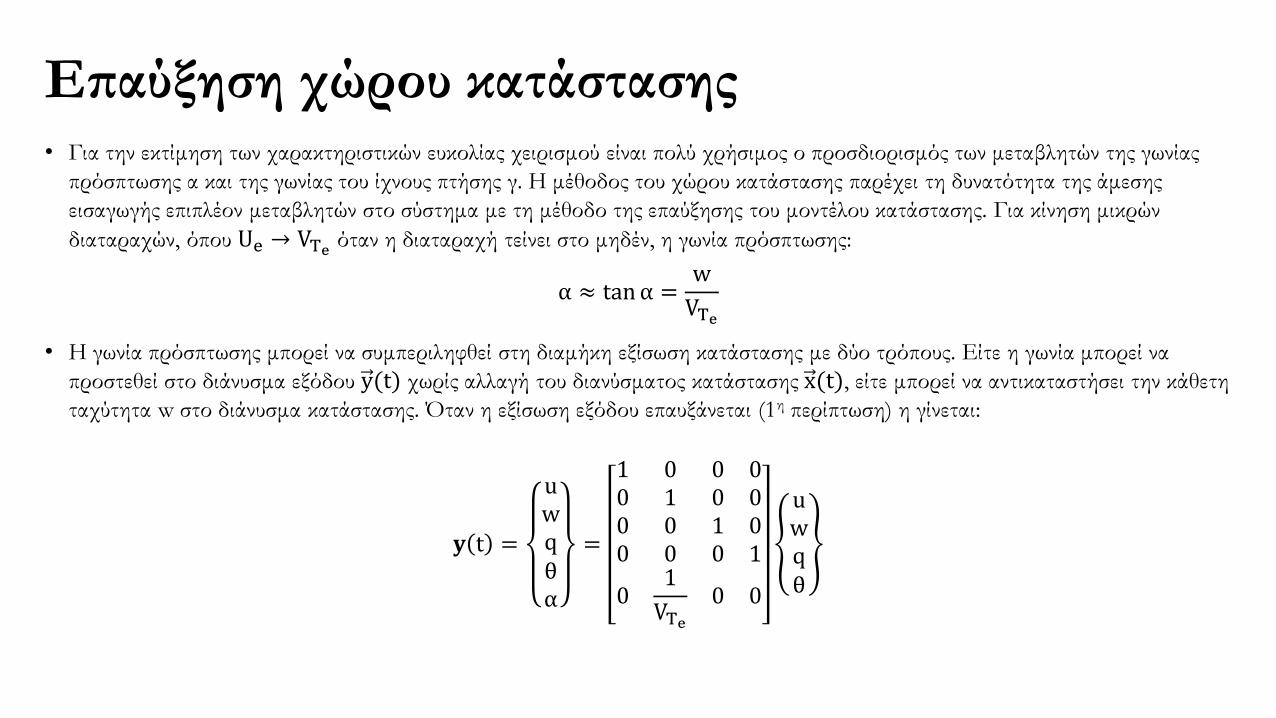
Επαύξηση χώρου κατάστασης• Για την εκτίμηση των χαρακτηριστικών ευκολίας χειρισμού είναι πολύ χρήσιμος ο προσδιορισμός των μεταβλητών της γωνίας
πρόσπτωσης α και της γωνίας του ίχνους πτήσης γ. Η μέθοδος του χώρου κατάστασης παρέχει τη δυνατότητα της άμεσης
εισαγωγής επιπλέον μεταβλητών στο σύστημα με τη μέθοδο της επαύξησης του μοντέλου κατάστασης. Για κίνηση μικρών
διαταραχών, όπου Ue → VTe όταν η διαταραχή τείνει στο μηδέν, η γωνία πρόσπτωσης:
α ≈ tanα =w
VTe
• Η γωνία πρόσπτωσης μπορεί να συμπεριληφθεί στη διαμήκη εξίσωση κατάστασης με δύο τρόπους. Είτε η γωνία μπορεί να
προστεθεί στο διάνυσμα εξόδου y(t) χωρίς αλλαγή του διανύσματος κατάστασης x(t), είτε μπορεί να αντικαταστήσει την κάθετη
ταχύτητα w στο διάνυσμα κατάστασης. Όταν η εξίσωση εξόδου επαυξάνεται (1η περίπτωση) η γίνεται:
𝐲 t =
uwqθα
=
1 0 0 00 1 0 00 0 1 00 0 0 1
01
VTe0 0
uwqθ
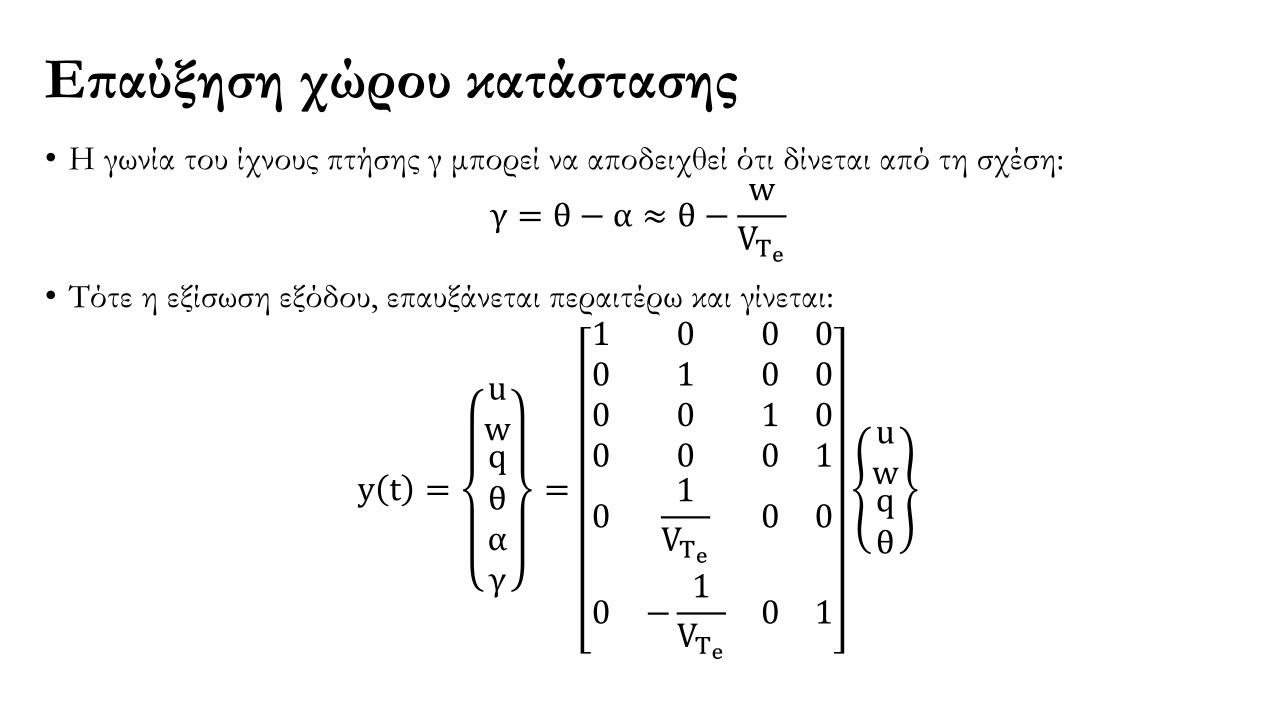
Επαύξηση χώρου κατάστασης
• Η γωνία του ίχνους πτήσης γ μπορεί να αποδειχθεί ότι δίνεται από τη σχέση:
γ = θ − α ≈ θ −w
VTe
• Τότε η εξίσωση εξόδου, επαυξάνεται περαιτέρω και γίνεται:
y t =
uwqθαγ
=
1 0 0 00 1 0 00 0 1 00 0 0 1
01
VTe0 0
0 −1
VTe0 1
uwqθ
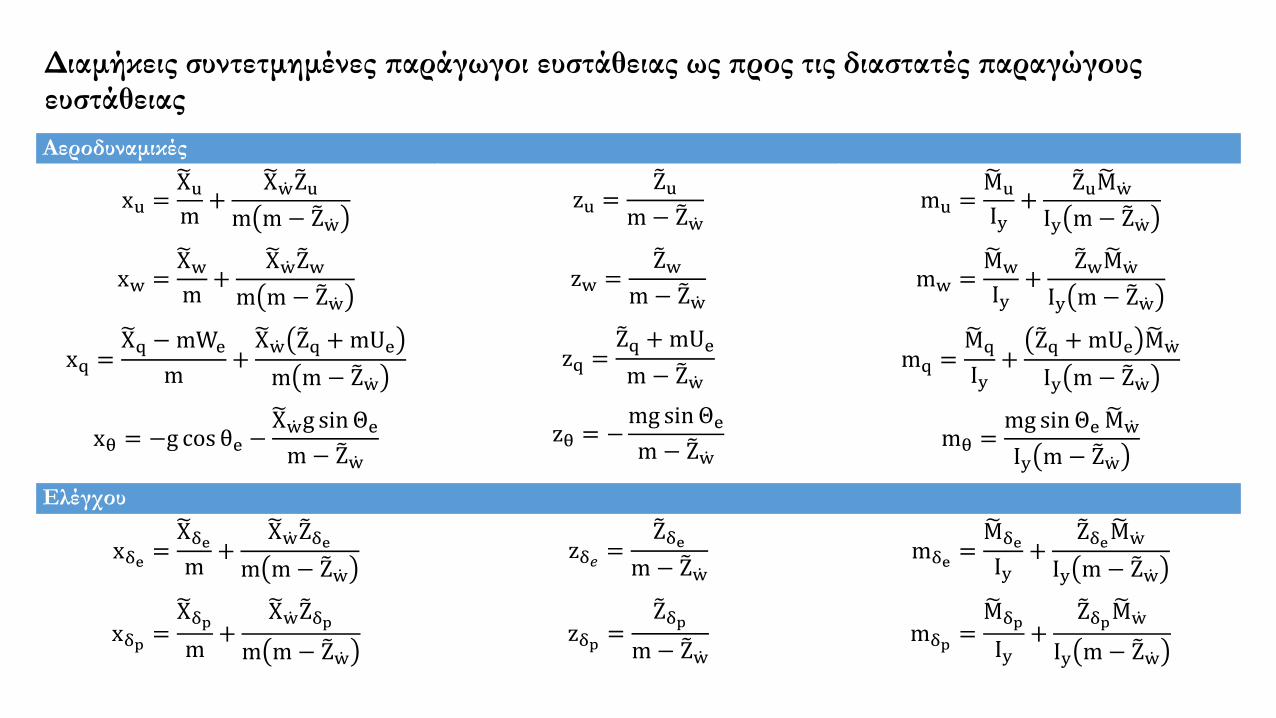
Διαμήκεις συντετμημένες παράγωγοι ευστάθειας ως προς τις διαστατές παραγώγους ευστάθειας
Αεροδυναμικές
xu = Xum
+ X w
Zu
m m− Z w
zu = Zu
m− Z w
mu = Mu
Iy+
Zu M w
Iy m− Z w
xw = Xwm
+ X w
Zw
m m− Z w
zw = Zw
m− Z w
mw = Mw
Iy+
Zw M w
Iy m− Z w
xq = Xq −mWe
m+ X w
Zq +mUe
m m− Z w
zq = Zq +mUe
m− Z wmq =
Mq
Iy+
Zq +mUe M w
Iy m− Z w
xθ = −g cos θe − X wg sinΘe
m− Z w
zθ = −mg sin Θe
m− Z wmθ =
mg sin Θe M w
Iy m− Z w
Ελέγχου
xδe = Xδem
+ X w
Zδem m− Z w
zδ𝑒 = Zδe
m− Z w
mδe = Mδe
Iy+
Zδe M w
Iy m− Z w
xδp = Xδpm
+ X w
Zδp
m m− Z w
zδp = Zδp
m− Z w
mδp = Mδp
Iy+
Zδp M w
Iy m− Z w
Αδιαστατοποίηση των εξισώσεων κίνησης• Η αδιαστατοποίηση των εξισώσεων, αφορά κυρίως την απλοποίηση των εκφράσεων των παραγώγων ευστάθειας.
• Υπάρχουν διάφορες μορφές αδιαστατοποίησης των εξισώσεων κίνησης.
• Η παράμετρος αεροδυναμικής δύναμης με την οποία διαιρούνται οι εξισώσεις των δυνάμεων Χ,Υ και Ζ για να
αδιαστατοποιηθούν είναι:
1
2ρVTe
2 S = Q ∙ S [Ν]
• Το διάμηκες μήκος αναφοράς είναι η μέση αεροδυναμική χορδή c , ενώ το εγκάρσιο μήκος αναφοράς είναι το
εκπέτασμα της πτέρυγας b. Έτσι, η παράμετρος αεροδυναμικής ροπής με την οποία διαιρείται η διαμήκης εξίσωση
τις ροπής M για να αδιαστατοποιηθεί είναι:
1
2ρVTe
2 S c = Q ∙ S ∙ c [Νm]
• Συνεπώς ανάλογα με την μέθοδο αδιαστατοποίησης, προκύπτουν και οι ανάλογες εκφράσεις των εξισώσεων κίνησης
και των παραγώγων ευστάθειας.
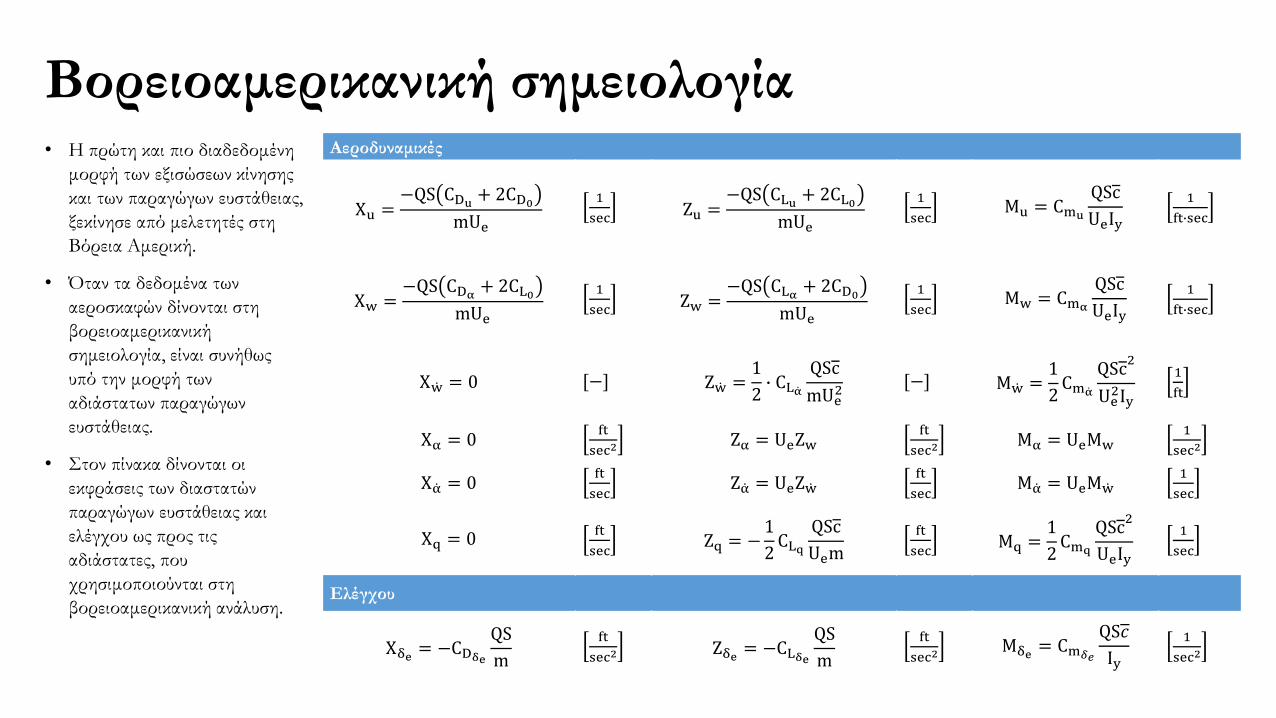
Βορειοαμερικανική σημειολογία• Η πρώτη και πιο διαδεδομένη
μορφή των εξισώσεων κίνησης
και των παραγώγων ευστάθειας,
ξεκίνησε από μελετητές στη
Βόρεια Αμερική.
• Όταν τα δεδομένα των
αεροσκαφών δίνονται στη
βορειοαμερικανική
σημειολογία, είναι συνήθως
υπό την μορφή των
αδιάστατων παραγώγων
ευστάθειας.
• Στον πίνακα δίνονται οι
εκφράσεις των διαστατών
παραγώγων ευστάθειας και
ελέγχου ως προς τις
αδιάστατες, που
χρησιμοποιούνται στη
βορειοαμερικανική ανάλυση.
Αεροδυναμικές
Xu =−QS CDu + 2CD0
mUe
1
secZu =
−QS CLu + 2CL0mUe
1
secMu = Cmu
QSc
UeIy
1
ft∙sec
Xw =−QS CDα + 2CL0
mUe
1
secZw =
−QS CLα + 2CD0mUe
1
secMw = Cmα
QSc
UeIy
1
ft∙sec
X w = 0 [−] Z w =1
2∙ CL α
QSc
mUe2
[−] M w =1
2Cm α
QSc2
Ue2Iy
1
ft
Xα = 0ft
sec2Zα = UeZw
ft
sec2Mα = UeMw
1
sec2
X α = 0ft
secZ α = UeZ w
ft
secΜ α = UeM w
1
sec
Xq = 0ft
secZq = −
1
2CLq
QSc
Uem
ft
secMq =
1
2Cmq
QSc2
UeIy
1
sec
Ελέγχου
Xδe = −CDδeQS
m
ft
sec2Zδe = −CLδe
QS
m
ft
sec2Mδe = Cm𝛿𝑒
QS𝑐
Iy
1
sec2
Διαμήκεις συντετμημένες παράγωγοι ευστάθειας ως προς τις διαστατές βορειοαμερικανικές παραγώγους ευστάθειας
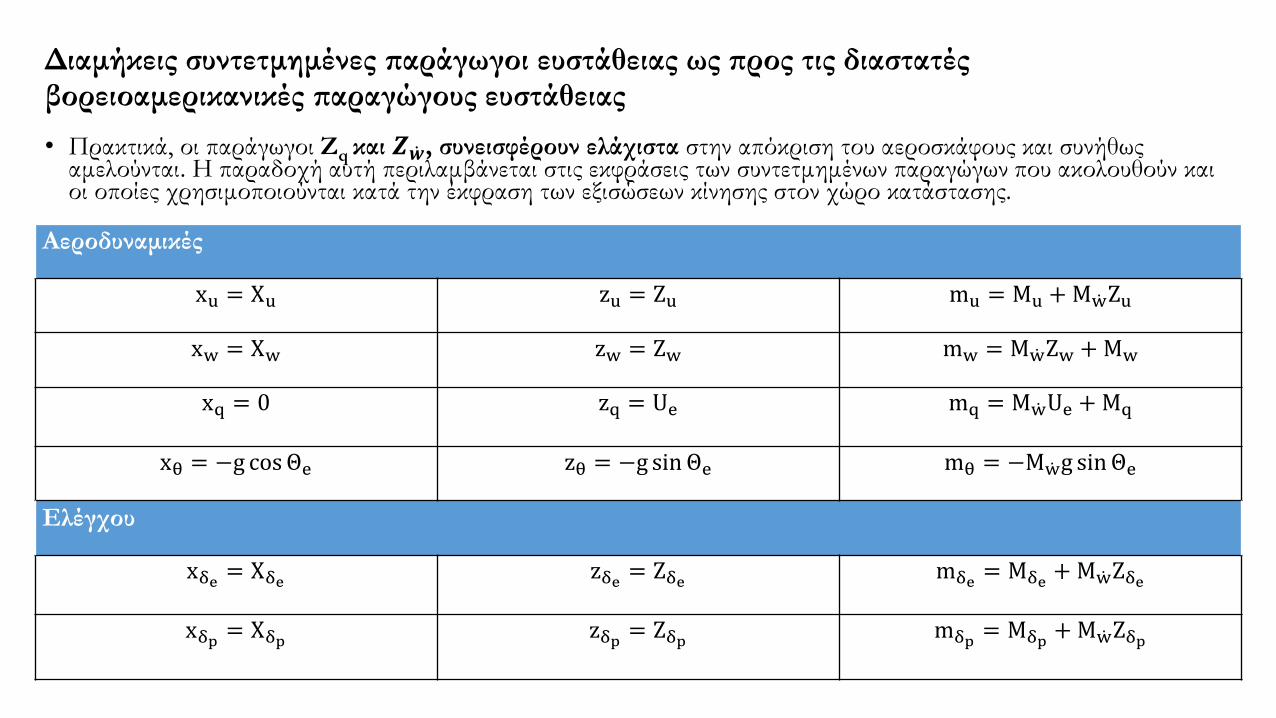
• Πρακτικά, οι παράγωγοι Ζq και 𝜡 𝒘, συνεισφέρουν ελάχιστα στην απόκριση του αεροσκάφους και συνήθως αμελούνται. Η παραδοχή αυτή περιλαμβάνεται στις εκφράσεις των συντετμημένων παραγώγων που ακολουθούν και οι οποίες χρησιμοποιούνται κατά την έκφραση των εξισώσεων κίνησης στον χώρο κατάστασης.
Αεροδυναμικές
xu = Xu zu = Ζu mu = Mu +M wZu
xw = Xw zw = Zw mw = M wZw +Mw
xq = 0 zq = Ue mq = M wUe +Mq
xθ = −g cosΘe zθ = −g sin Θe mθ = −M wg sinΘe
Ελέγχου
xδe = Xδe zδe = Zδe mδe = Mδe +M wZδe
xδp = Xδp zδp = Zδp mδp = Mδp +M wZδp
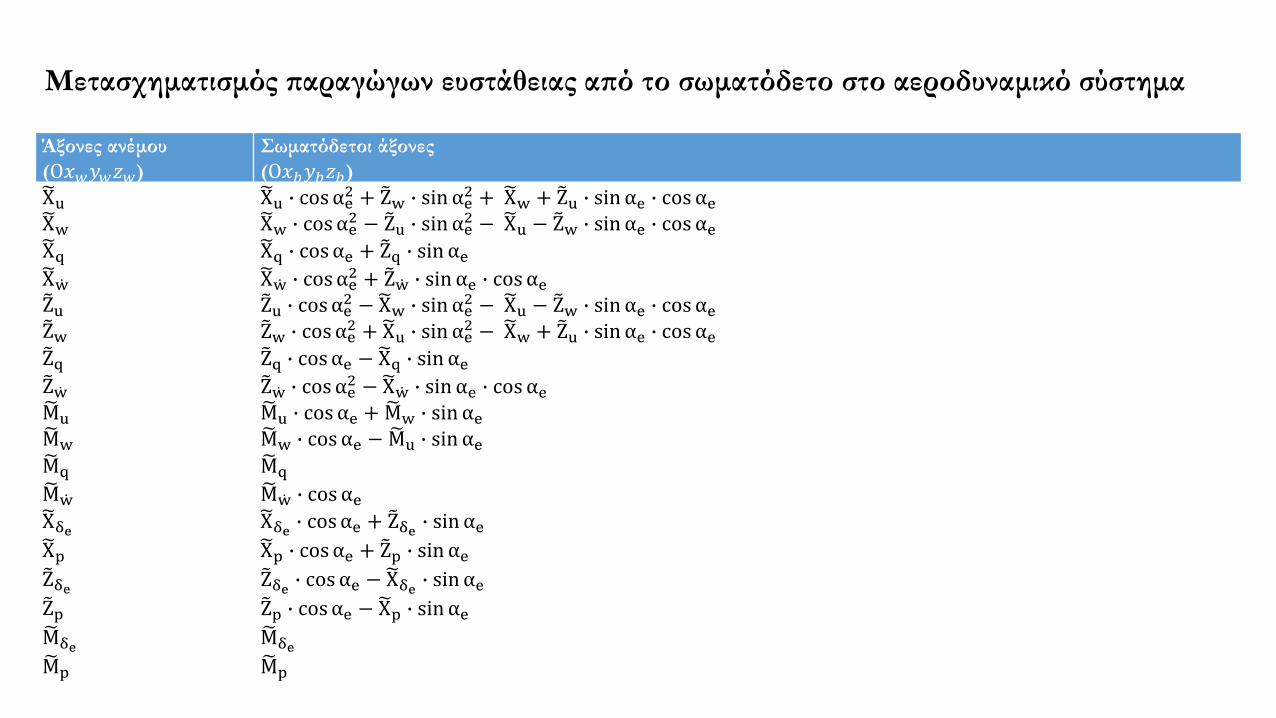
Μετασχηματισμός παραγώγων ευστάθειας από το σωματόδετο στο αεροδυναμικό σύστημα
Άξονες ανέμου
(Ο𝑥𝑤𝑦𝑤𝑧𝑤)
Σωματόδετοι άξονες
(Ο𝑥𝑏𝑦𝑏𝑧𝑏) Xu Xu ∙ cos αe
2 + Zw ∙ sin αe2 + Xw + Zu ∙ sin αe ∙ cos αe
Xw Xw ∙ cos αe2 − Zu ∙ sin αe
2 − Xu − Zw ∙ sin αe ∙ cos αe Xq Xq ∙ cos αe + Zq ∙ sin αe X w
X w ∙ cos αe2 + Z w ∙ sin αe ∙ cos αe
Zu Zu ∙ cos αe2 − Xw ∙ sin αe
2 − Xu − Zw ∙ sin αe ∙ cos αe Zw Zw ∙ cos αe
2 + Xu ∙ sin αe2 − Xw + Zu ∙ sin αe ∙ cos αe
Zq Zq ∙ cos αe − Xq ∙ sin αe Z w
Z w ∙ cos αe2 − X w ∙ sin αe ∙ cos αe
Mu Mu ∙ cos αe + Mw ∙ sin αe
Mw Mw ∙ cos αe − Mu ∙ sin αe
Mq Mq
M w M w ∙ cos αe
Xδe Xδe ∙ cos αe +
Zδe ∙ sin αe Xp Xp ∙ cos αe + Zp ∙ sin αe Zδe
Zδe ∙ cos αe − Xδe ∙ sin αe
Zp Zp ∙ cos αe − Xp ∙ sin αe Mδe
Mδe Mp
Mp
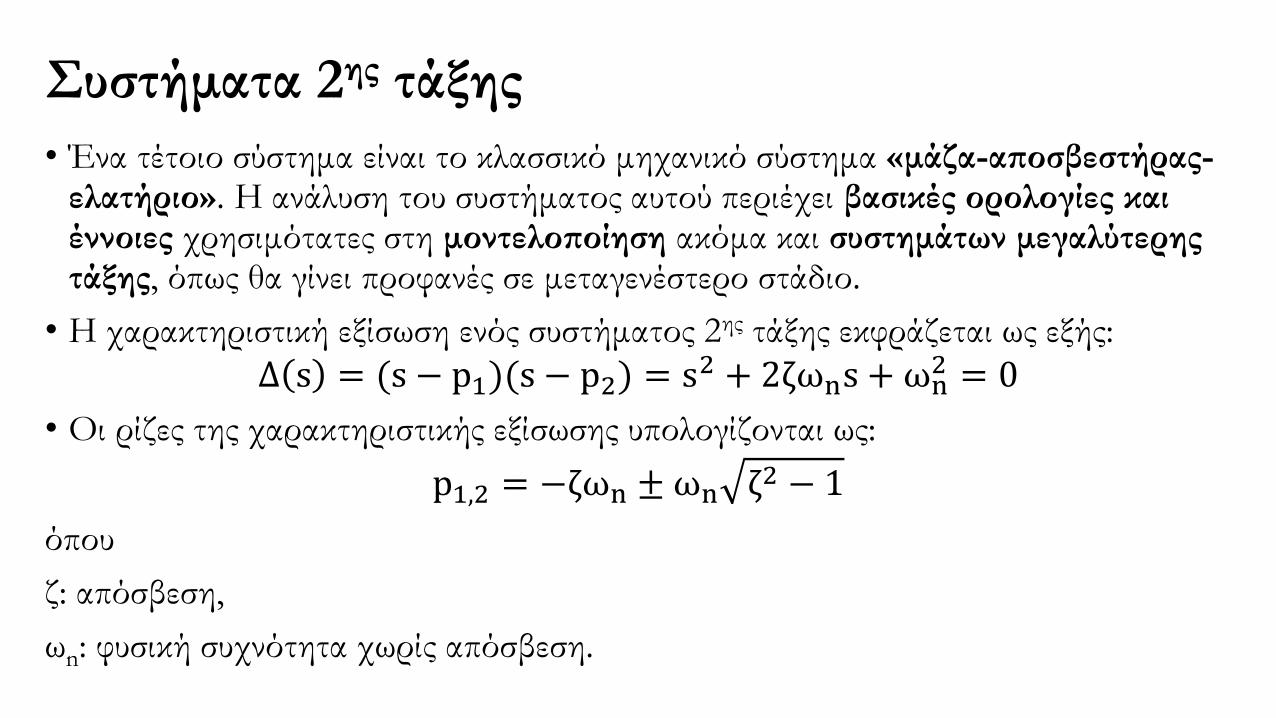
Συστήματα 2ης τάξης
• Ένα τέτοιο σύστημα είναι το κλασσικό μηχανικό σύστημα «μάζα-αποσβεστήρας-ελατήριο». Η ανάλυση του συστήματος αυτού περιέχει βασικές ορολογίες και έννοιες χρησιμότατες στη μοντελοποίηση ακόμα και συστημάτων μεγαλύτερης τάξης, όπως θα γίνει προφανές σε μεταγενέστερο στάδιο.
• Η χαρακτηριστική εξίσωση ενός συστήματος 2ης τάξης εκφράζεται ως εξής:
Δ s = (s − p1)(s − p2) = s2 + 2ζωns + ωn2 = 0
• Οι ρίζες της χαρακτηριστικής εξίσωσης υπολογίζονται ως:
p1,2 = −ζωn ±ωn ζ2 − 1
όπου
ζ: απόσβεση,
ωn: φυσική συχνότητα χωρίς απόσβεση.
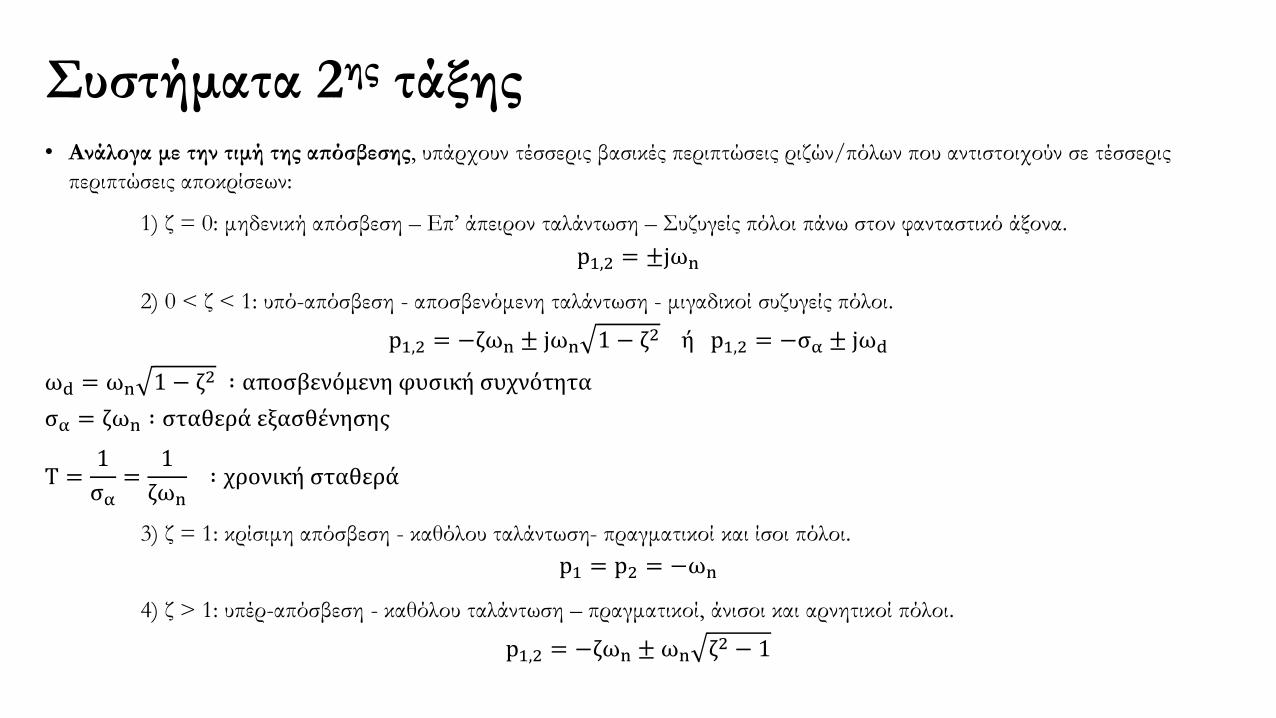
Συστήματα 2ης τάξης• Ανάλογα με την τιμή της απόσβεσης, υπάρχουν τέσσερις βασικές περιπτώσεις ριζών/πόλων που αντιστοιχούν σε τέσσερις
περιπτώσεις αποκρίσεων:
1) ζ = 0: μηδενική απόσβεση – Επ’ άπειρον ταλάντωση – Συζυγείς πόλοι πάνω στον φανταστικό άξονα.
p1,2 = ±jωn
2) 0 < ζ < 1: υπό-απόσβεση - αποσβενόμενη ταλάντωση - μιγαδικοί συζυγείς πόλοι.
p1,2 = −ζωn ± jωn 1 − ζ2 ή p1,2 = −σα ± jωd
ωd = ωn 1 − ζ2 ∶ αποσβενόμενη φυσική συχνότητα
σα = ζωn ∶ σταθερά εξασθένησης
Τ =1
σα=
1
ζωn∶ χρονική σταθερά
3) ζ = 1: κρίσιμη απόσβεση - καθόλου ταλάντωση- πραγματικοί και ίσοι πόλοι.
p1 = p2 = −ωn
4) ζ > 1: υπέρ-απόσβεση - καθόλου ταλάντωση – πραγματικοί, άνισοι και αρνητικοί πόλοι.
p1,2 = −ζωn ± ωn ζ2 − 1
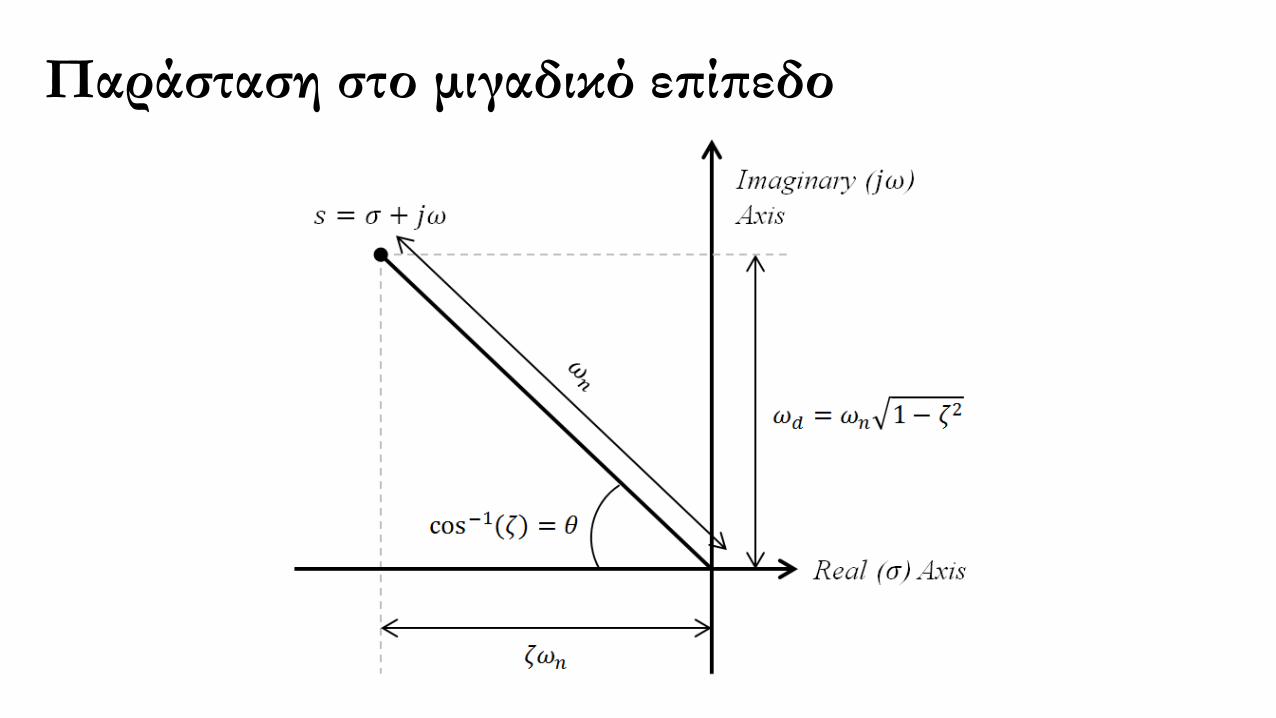
Παράσταση στο μιγαδικό επίπεδο
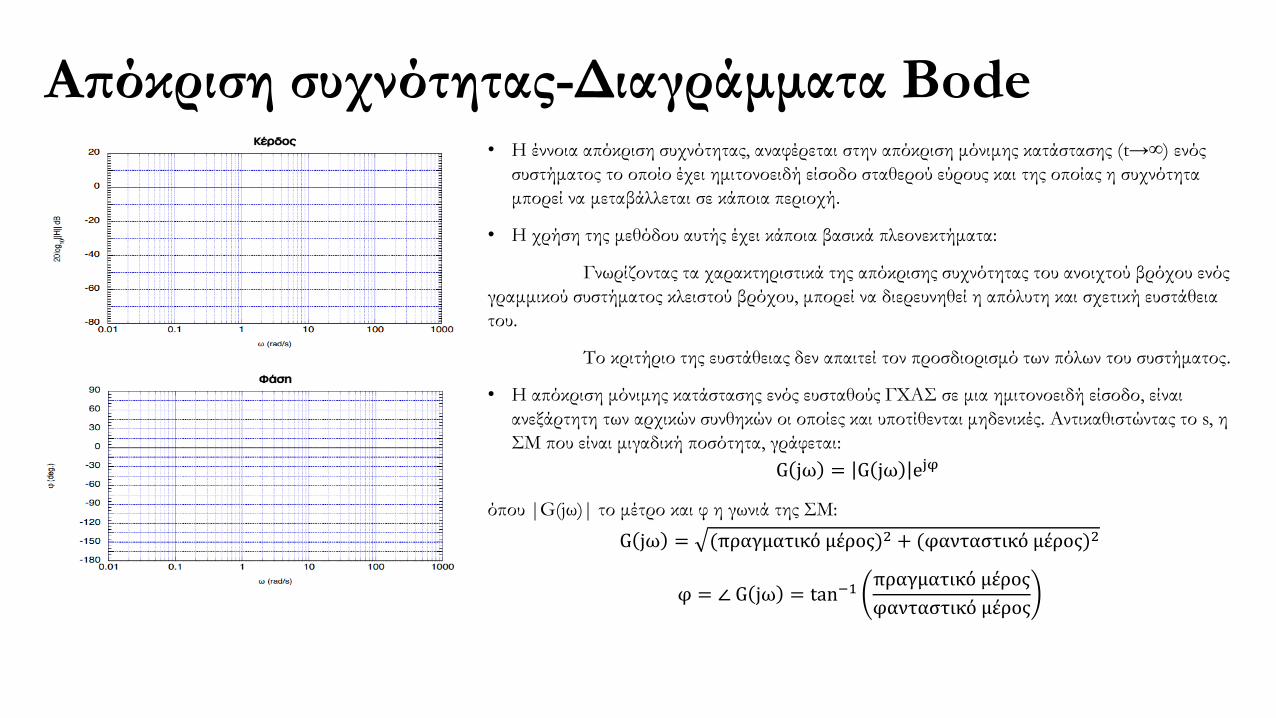
Απόκριση συχνότητας-Διαγράμματα Bode• Η έννοια απόκριση συχνότητας, αναφέρεται στην απόκριση μόνιμης κατάστασης (t→∞) ενός
συστήματος το οποίο έχει ημιτονοειδή είσοδο σταθερού εύρους και της οποίας η συχνότητα
μπορεί να μεταβάλλεται σε κάποια περιοχή.
• Η χρήση της μεθόδου αυτής έχει κάποια βασικά πλεονεκτήματα:
Γνωρίζοντας τα χαρακτηριστικά της απόκρισης συχνότητας του ανοιχτού βρόχου ενός
γραμμικού συστήματος κλειστού βρόχου, μπορεί να διερευνηθεί η απόλυτη και σχετική ευστάθεια
του.
Το κριτήριο της ευστάθειας δεν απαιτεί τον προσδιορισμό των πόλων του συστήματος.
• Η απόκριση μόνιμης κατάστασης ενός ευσταθούς ΓΧΑΣ σε μια ημιτονοειδή είσοδο, είναι
ανεξάρτητη των αρχικών συνθηκών οι οποίες και υποτίθενται μηδενικές. Αντικαθιστώντας το s, η
ΣΜ που είναι μιγαδική ποσότητα, γράφεται:
G jω = G jω ejφ
όπου |G(jω)| το μέτρο και φ η γωνιά της ΣΜ:
G jω = (πραγματικό μέρος)2 + (φανταστικό μέρος)2
φ = ∠ G jω = tan−1πραγματικό μέρος
φανταστικό μέρος