JAason Chin shlin Yu enough to give themselves a team name ...

Numerical Relativity
or
Jimmy, You Haven’t Done
Enough Yet!

Why is Numerical Relativity important?
1. Find out new things about Einstein equations
2. Predict wave forms for experiments (LIGO,
LISA . . . )
Examples of (1):
• Critical behavior in black hole formation
(Choptuik 1993)
• Toroidal black holes
(Shapiro and Teukolsky 1994)

Predicting wave forms is urgent!
• To improve sensitivity
• To compare theory and experiment
What can we learn from experiments like LIGO?
We know
Lots of mass in small volume
M > Mmax for neutron star
Deduce black hole
BUT
Are these the black holes of Einstein’s theory?
Event horizon = 1-way membrane
Geometry of spacetime = Schwarzschild metric
etc.

GR tested only in weak-field regime
Solar system expts:v2
c2corrections to Φnewt
Hulse-Taylor binary pulsar: (existence of GW)
“only”v5
c5
Only black holes test the full nonlinear,
strong-field aspects of GR

If we can detect GW signals from binary black
hole coalescence, we may finally have the
opportunity to confront the most dramatic
predictions of the theory with experiment.

Why is it so hard to solve the binary black hole
problem?
1992 — brute force?

The Numerical Problem — Scale
16 – 50 variables, 3-D
Length scale M
1% accuracy FD → resolution M/20
λ for radiation from 6M ∼ 100M
→ 2000 grid points per dimension (uniform)
→ 3 terabytes
2 orbits + plunge ∼ 500M
→ 104 timesteps (Courant limit)
Complicated equations: ∼ 200 flops per variable
per grid pt per timestep
→ 106 teraflops for 1 modest simulation
(Mesh refinement)

The Numerical Problem — Black Hole
Singularities
1. Singularity avoiding time slicing
→ grid stretching
Calculations crash eventually (steep gradients)
2. Black hole excision

Finite differencing with excision:
������
������ ������
������ ��
������
� ��� ������
������
������������
������������
������
������
��� �
!�!"�"
#�#$�$
%�%&�&
'�'(�(
)�)*�*
+�+,�,
-�-.�.
/�/0�0
1�12�2
3�34�4

Can we cut the black hole out of the
computational domain?
Standard formulation:
Can require info from inside
No obvious b.c.
Coordinate freedom → “gauge” modes
New formulations:
Manifestly hyperbolic in strict
mathematical sense

Hyperbolic Formulations of GR
• Advantages
– Simpler equations (wave equations!).
– Well-posed.(Note: does not exclude exponential growth.)
– Characteristic fields ⇒Knowledge of allowed boundary conditions.
Horizon excision well-defined.
Well-defined prescription for outer boundary.
• Disadvantages
– More variables.
– More constraints must be satisfied.
– More complicated non-principal terms.

Example of hyperbolic formulation of GR
Einstein-Christoffel (Anderson & York 1999)
(30 variables):
∂0gij = −2αKij
∂0Kij + α∂kfkij = αX(gij,Kij, fkij)
∂0fkij + α∂kKij = αY (gij,Kij, fkij)
where
fkij ≡ Γ(ij)k + g`m(gkiΓ[`j]m + gkjΓ[`i]m)
3+1:
∂0gij = −2αKij
∂0Kij =α
2gk` (∂k∂`gij + ∂i∂jgk` − ∂i∂`gkj − ∂k∂jgi`)
+ αF (gij, Kij, ∂kgij)

Pseudospectral Collocation Methods
• Basic idea
– Equations, boundary conditions remain exact .
– Solution written as sum of N basis functions.
f(x, t) =N−1∑
k=0
fk(t)φk(x)
– Spectral method:
fk(t) =
∫
f(x, t)φk(x) dx
– Pseudospectral method (Lanczos 1938):
fk(t) =N−1∑
n=0
wnf(xn, t)φk(xn)
– Uses N collocation points {xn} → {f(xn, t)}.– Compute spatial derivatives analytically.
– Compute nonlinear terms at points {xn}.– Evolve f(xn, t) as ODEs (“method of lines”).
(Elliptic equations:
Solve simultaneous algebraic equations.)

• Advantages
– Exponential convergence for smooth solutions.(Solutions of Einstein’s equations are smooth invacuum!)
– No need to discretize boundary conditions.
⇒ Black hole excision is trivial.
• Disadvantages
– More work per coefficient.
– More restrictive Courant condition.
– Supression of high-frequency modes sometimes needed.
– No advantage for non-smooth solutions.
Prediction
In the next 10 years spectral methods will become
the method of choice for numerical simulations of
black holes. (Neutron stars?)

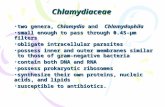
Spherical Symmetry (1D)
(Kidder, Scheel, Teukolsky, Carlson, Cook, PRD 62, 084032 (2000))
• Einstein-Christoffel formulation.
– 6 dynamical variables : grr, gθθ, Krr,Kθθ, frrr, frθθ.
– 6 characteristic fields:
U±r ≡ Krr ±
frrr√grr
, U 0
r ≡ grr,
U±θ ≡ Kθθ ±
frθθ√grr
, U 0
θ ≡ gθθ.
U+U−U+
U−U+
U−Horizon
r
t
• Use Chebyshev polynomials in r as basis.

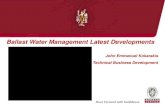
Schwarzschild BH, Spherical Symmetry (1D)
r = 1.9M
r = 11.9M
• Kerr-Schild coordinates
• Analytic gauge conditions.
• Inner boundary: No BC.
• Outer boundary:
U 0r , U
0
θ , U−r , U−
θ frozen.
U+r , U+
θ untouched.
• 4th-order Runge-Kutta, ∆t = 0.007M .
• Radial resolutions12, 16, 20, 24, 27, 32, 36, 40, 45, 48, 54, 60.

3D Black Hole Evolutions
(L. Kidder, M. Scheel, D. Shoemaker, H. Pfeiffer, L. Lindblom)
• Rectangular domains:
– x,y,z basis: Chebyshev polynomials.
• Spherical shell domains:
– r basis: Chebyshev polynomials.
– Angular basis: Y`m(θ, φ).
– Evolve Cartesian components.

• How do we handle 2 black holes?
Multiple domains:
• Interdomain boundaries:
Match characteristic fields (interpolate for
overlapping domains).

Single Schwarzschild BH, 3D
r = 1.9M
r = 11.9M
`max = 7
• Painleve-Gullstrand coordinates.
• Analytic gauge conditions.
• Inner boundary: No BC
• Outer boundary:
– Ingoing fields frozen.
– Outgoing fields untouched.
• 4th-order Runge-Kutta, ∆t = 0.0075M
• Radial resolutions8, 10, 12, 16, 18, 20, 24, 27, 30, 32, 36, 40, 45, 48, 54.

The Analytic Problem
Einstein’s equations are an overdetermined system
Pick a subset to solve (e.g., evolution equations)
“All” 3-d black hole evolutions unstable
(Important accomplishment of past decade)
How to deal with this . . .
• New formulations
– Partial success in special cases
• Control the instability
– Constraint-attracting system (Brodbeck, Frittelli,Huebner, Reula, 1999)
– Dynamical feedback of parameters (Tiglio 2003)
• Reimpose constraints (fast elliptic solver)
– Projection methods (Holst, Lindblom, Owen, Pfeiffer,Scheel, Kidder 2004)
• Least-squares methods
I =
∫
(
‖evolution equations‖2 + ‖constraints‖2)
dV
• . . .

We’re optimistic, but Jimmy, we sure could use
some help!