No Slide Title Problems Rn 3 t 7→Tt parametrisation of the set of feasible transformations....
82
Transcript of No Slide Title Problems Rn 3 t 7→Tt parametrisation of the set of feasible transformations....
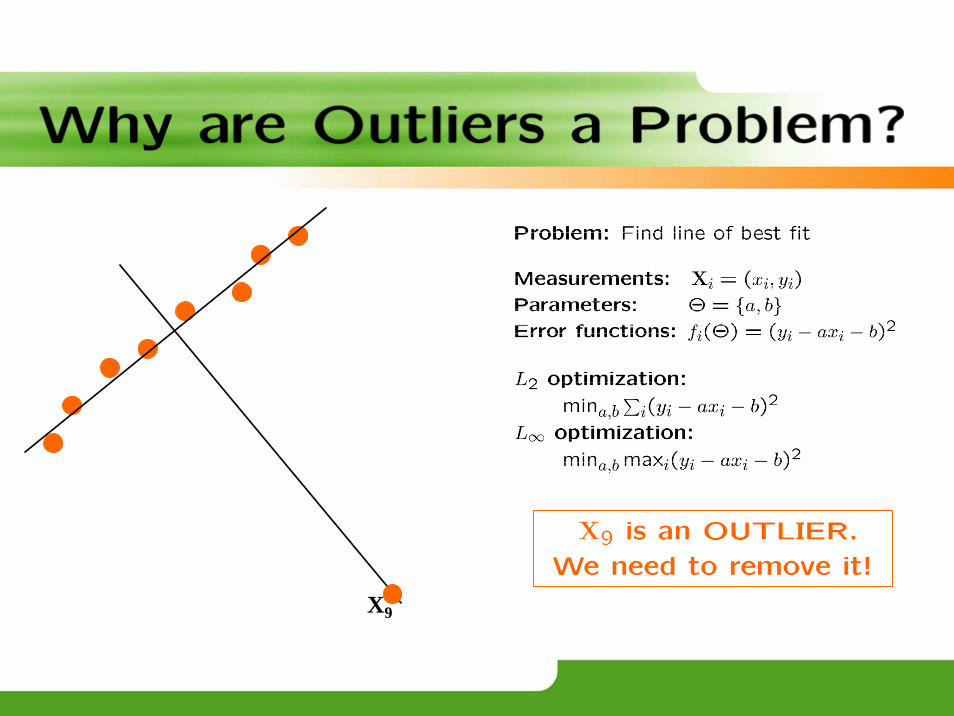
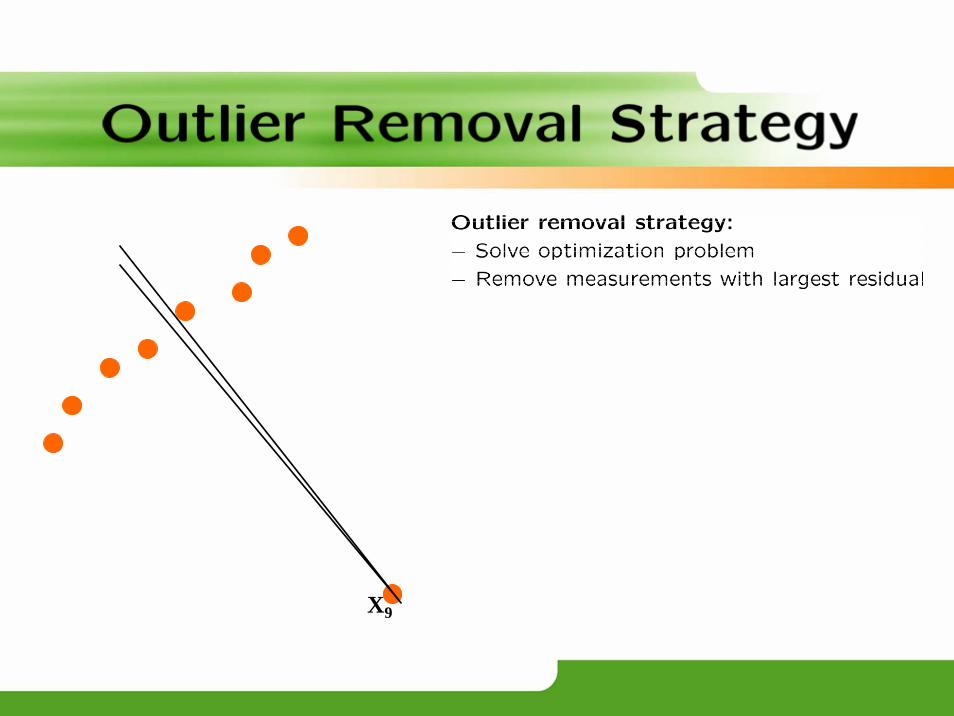
X9
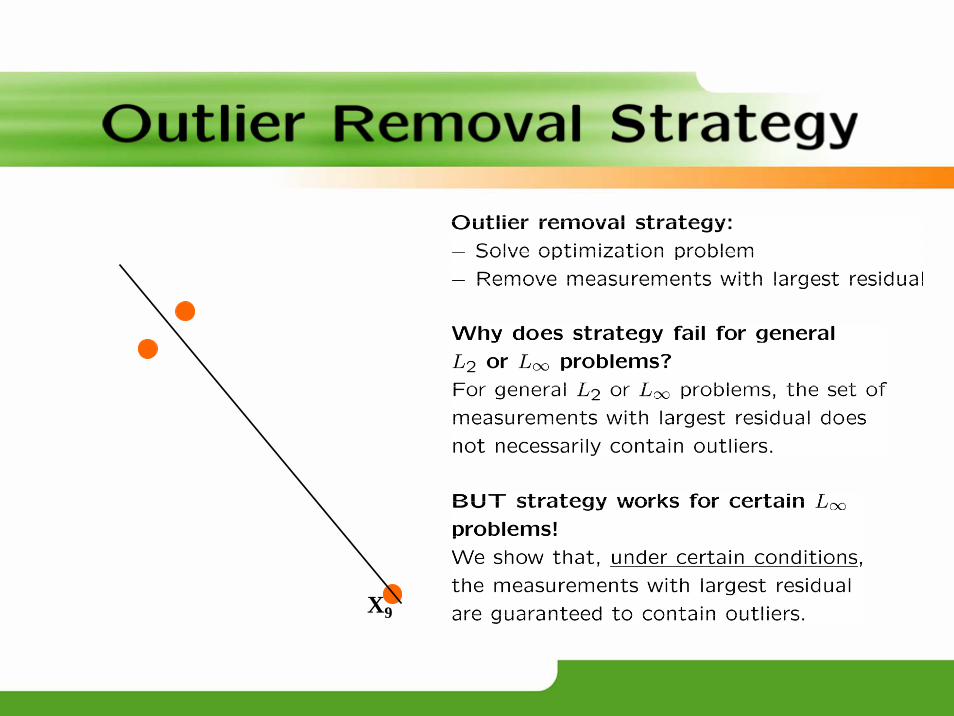
X9
X9
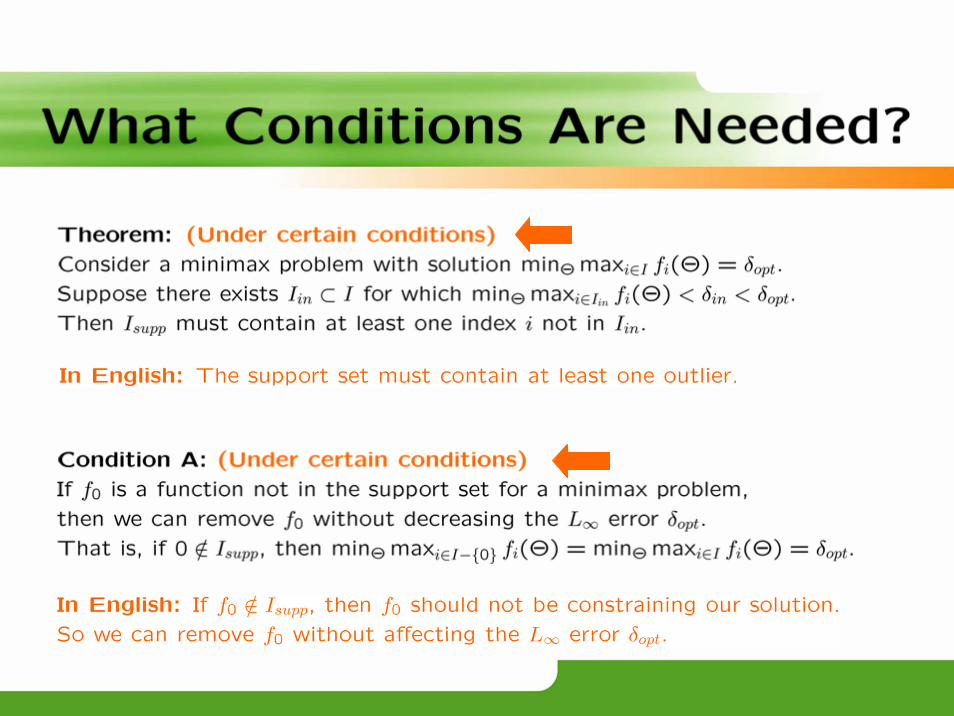

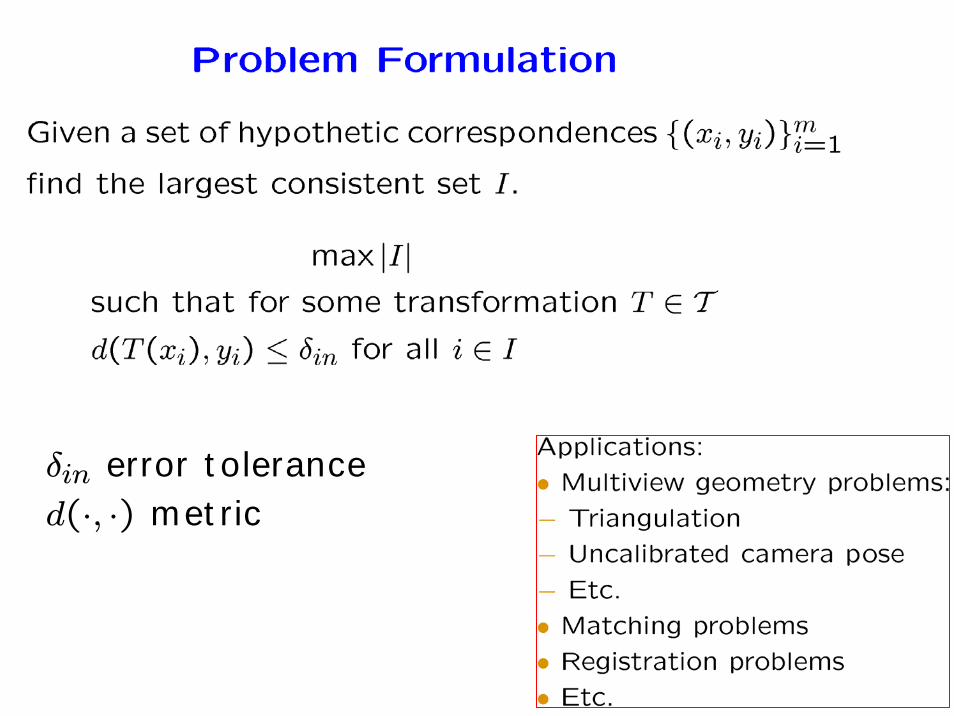
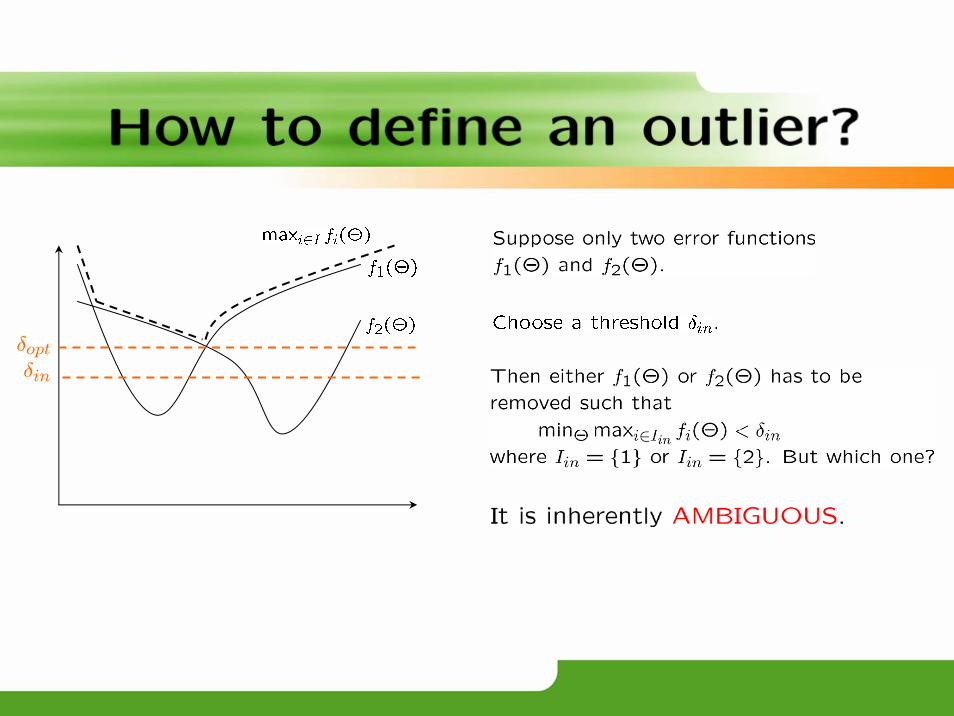
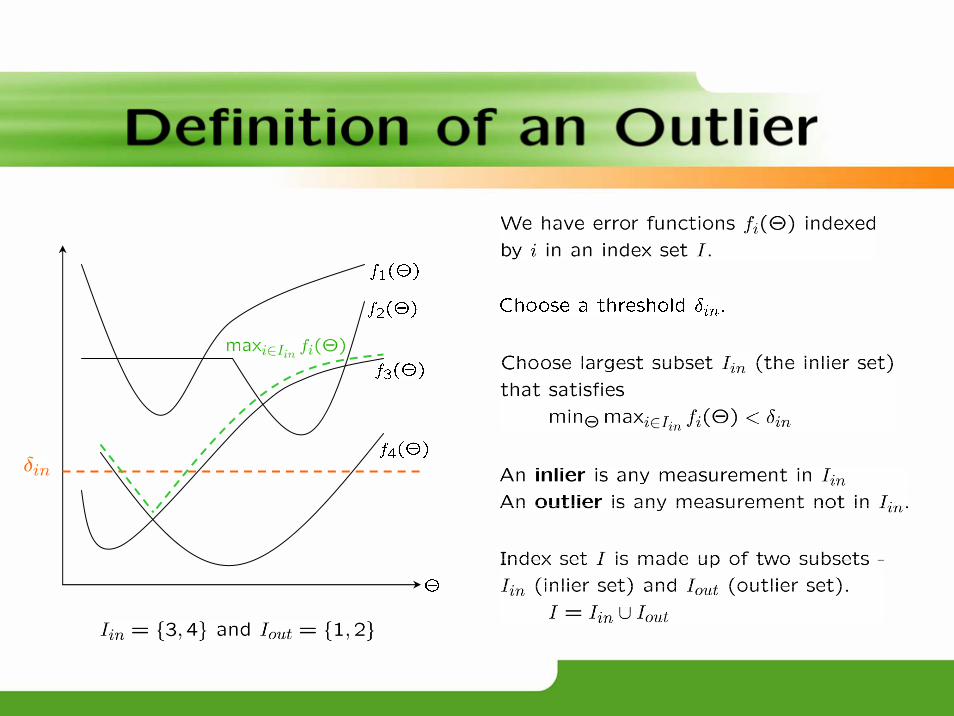
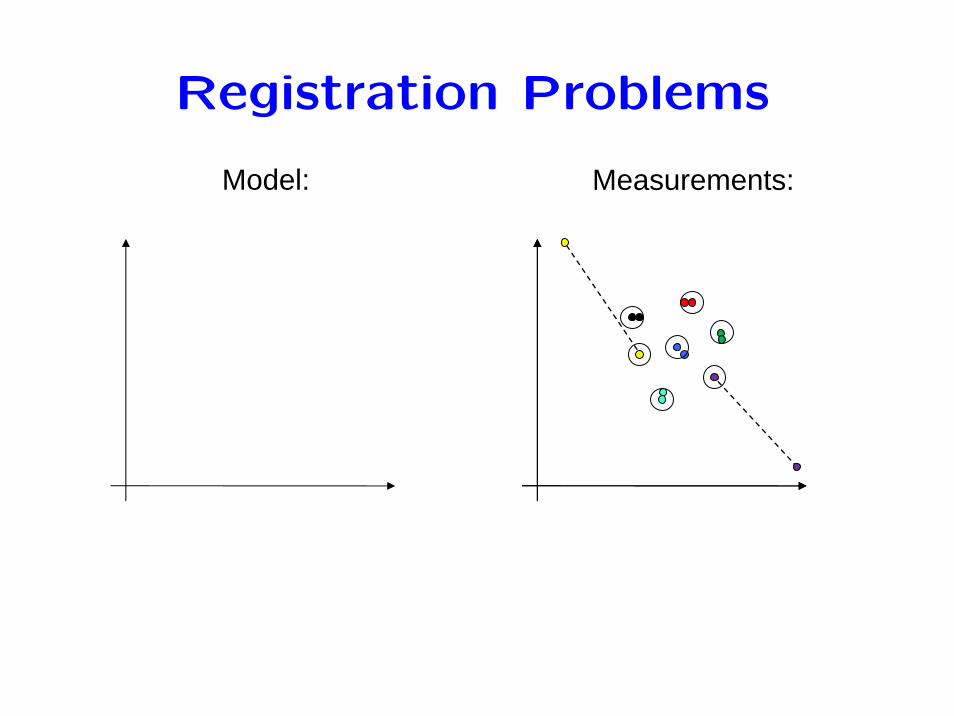
δin error t oleranced(·, ·) met ric
Measurements:Model:
Registration Problems
Measurements:Model:
Registration Problems
Measurements:Model:
Registration Problems
Measurements:Model:
Registration Problems
Registration Problems
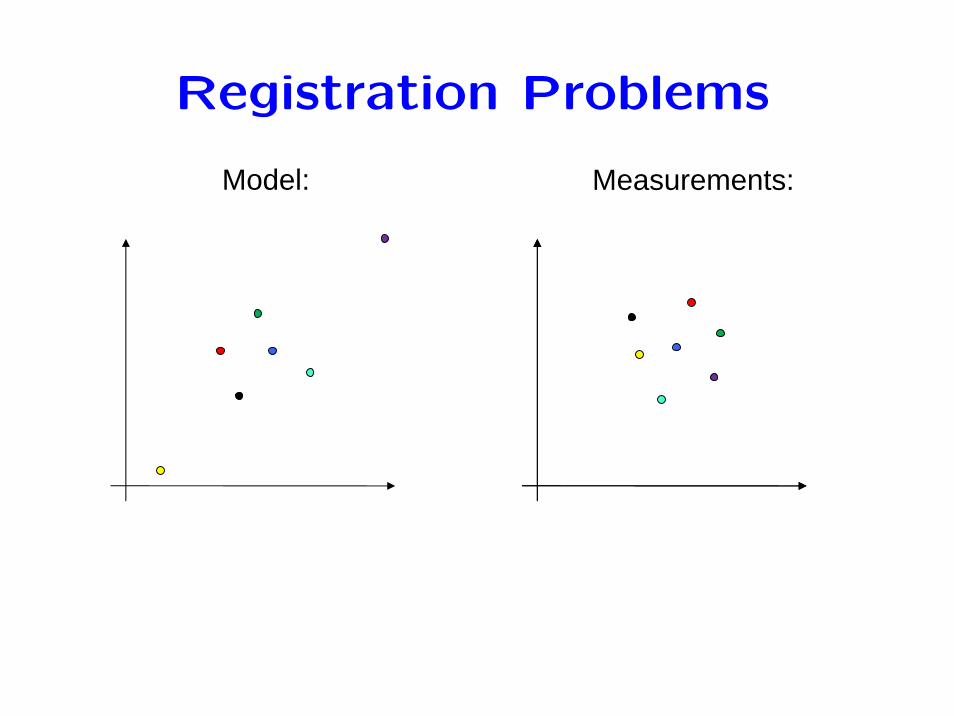
Source points: xiTarget points: yi, i = 1, ...,m
Registration Problems
Source points: xiTarget points: yi, i = 1, ...,m
δin error t oleranced(·, ·) met ric
Registration Problems
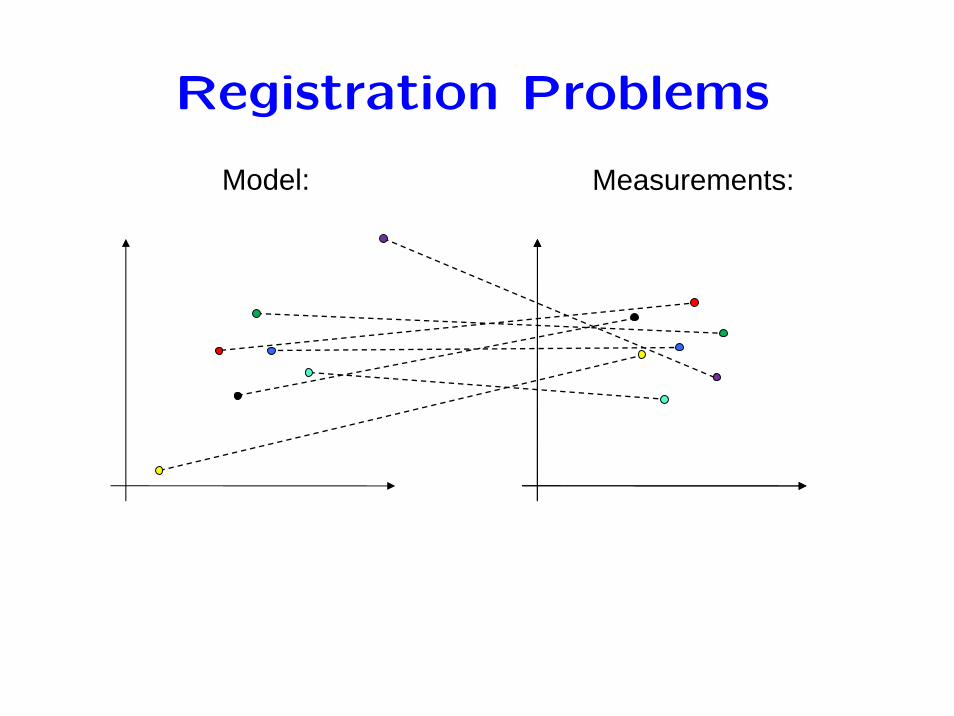
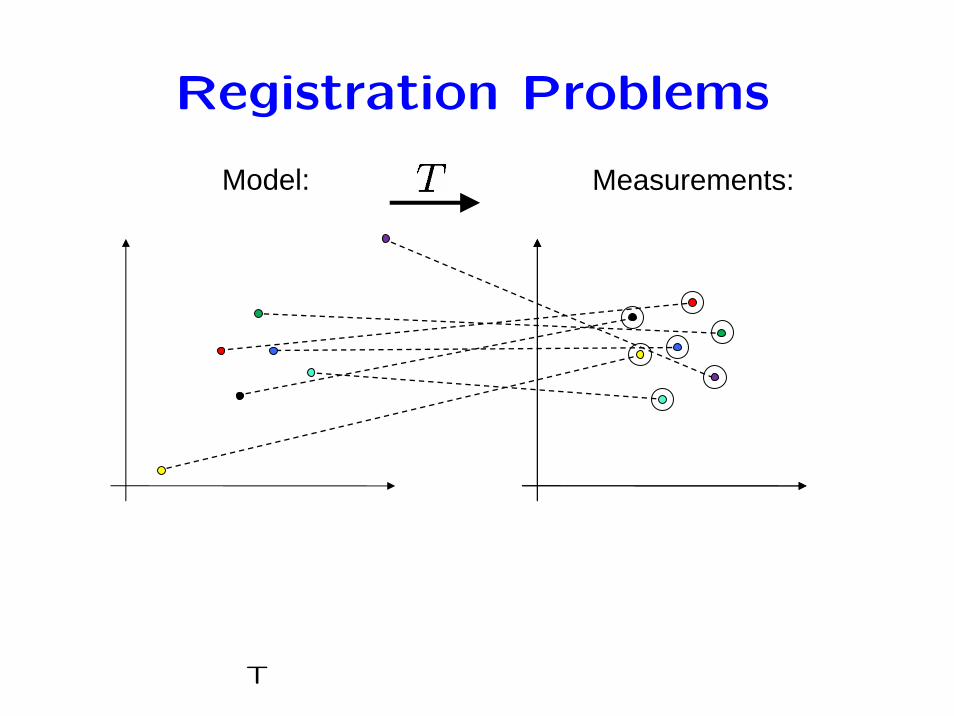
Rn 3 t 7→ Tt parametrisation of the set of
feasible transformations.
Registration Problems
Rn 3 t 7→ Tt parametrisation of the set of
feasible transformations.
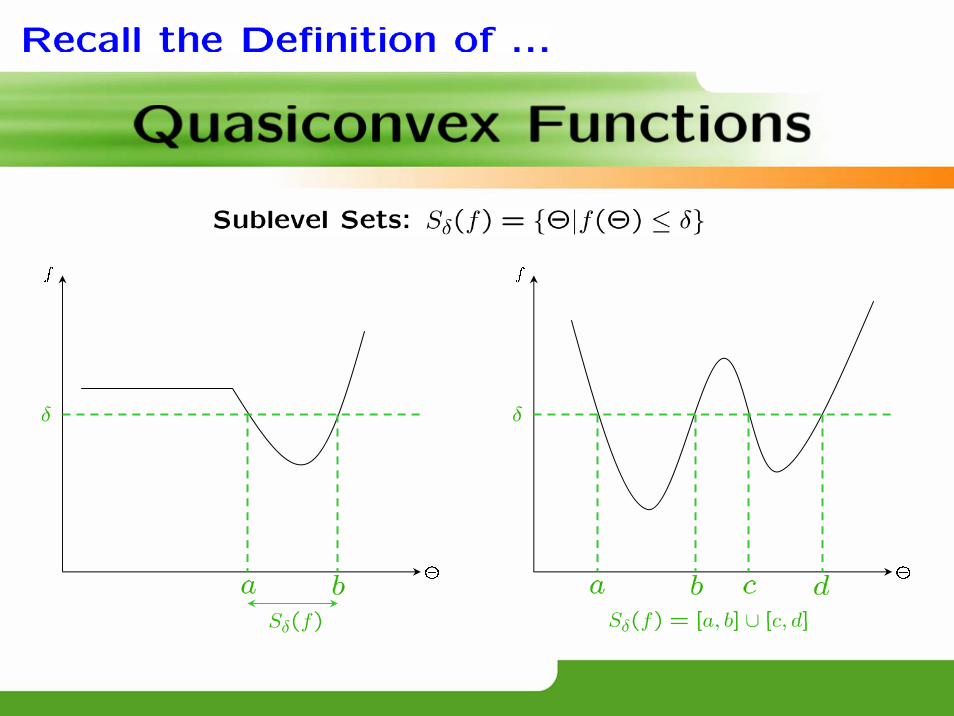
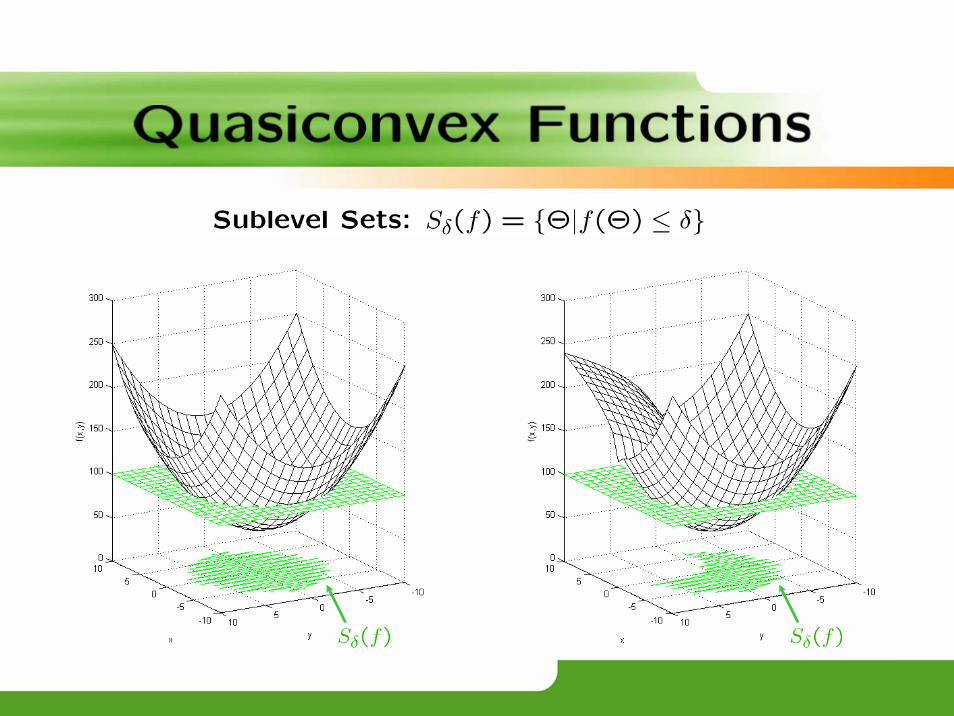
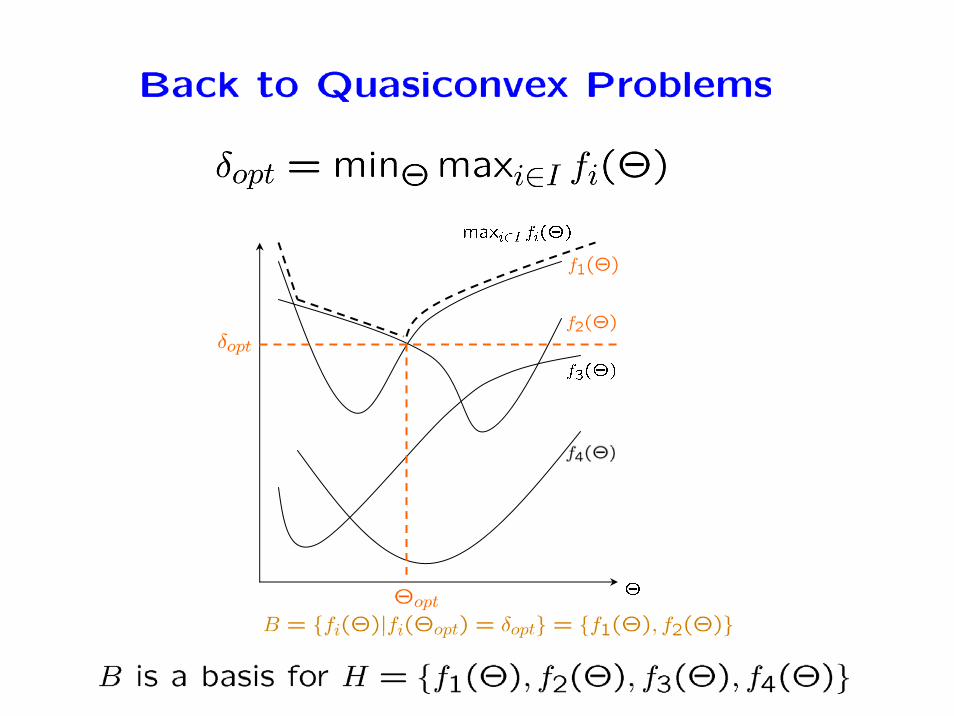
ri(t) = d(Tt(xi), yi)
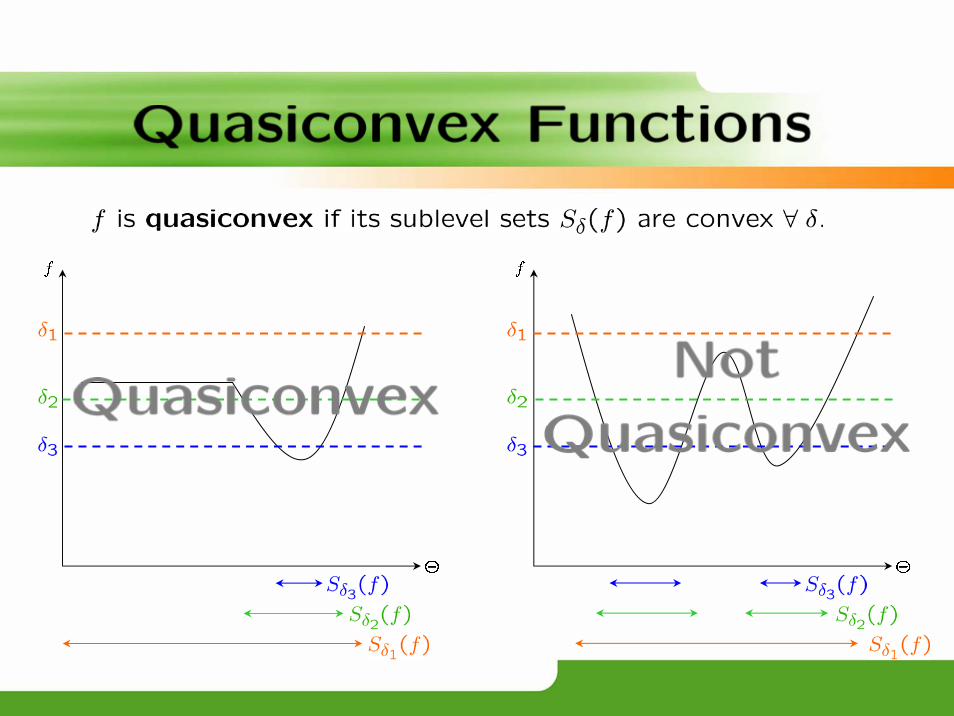
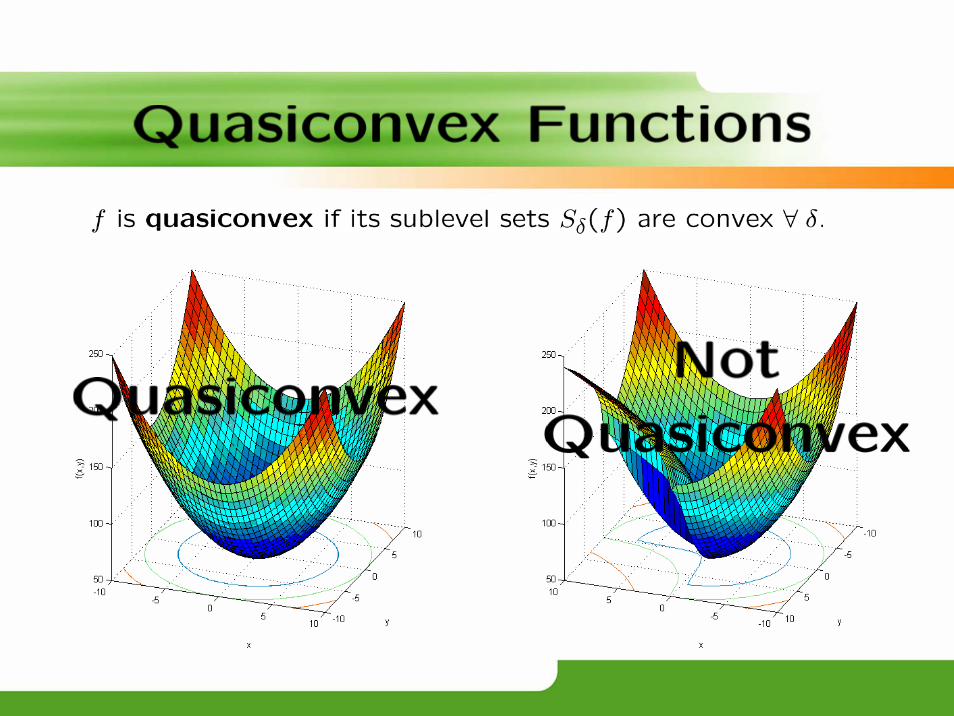
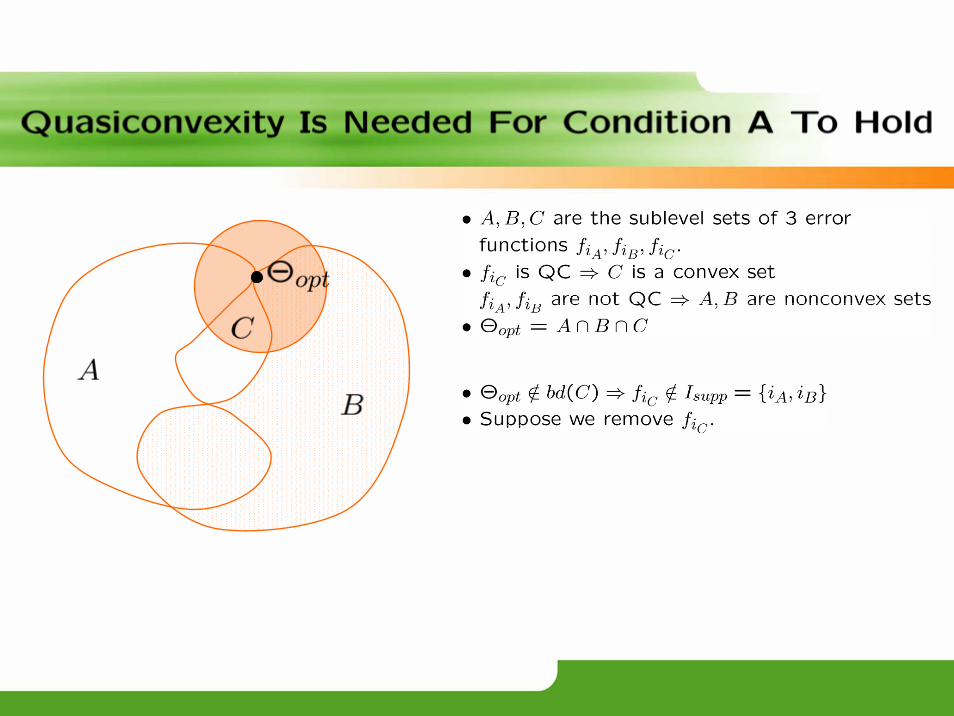
Assumption:
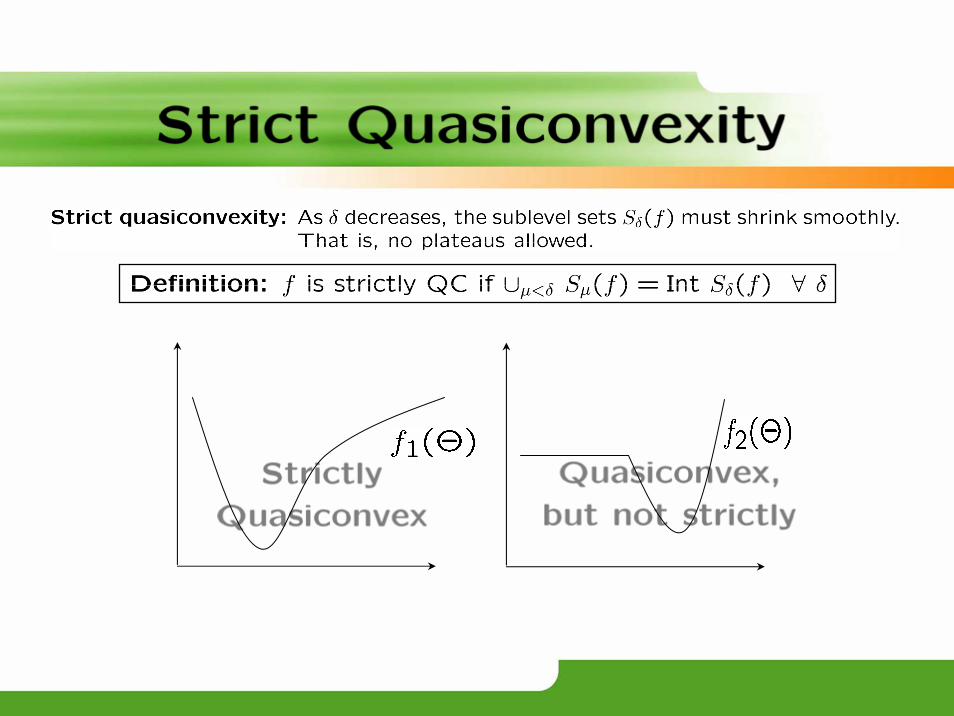
The reprojection errors
are quasi/pseudo-convex functions.
Registration Problems2D Similarity Transformation:
d(Rxi+ t, yi) = ||Rxi+ t− y||2R(a, b) =
Ãa b−b a
!
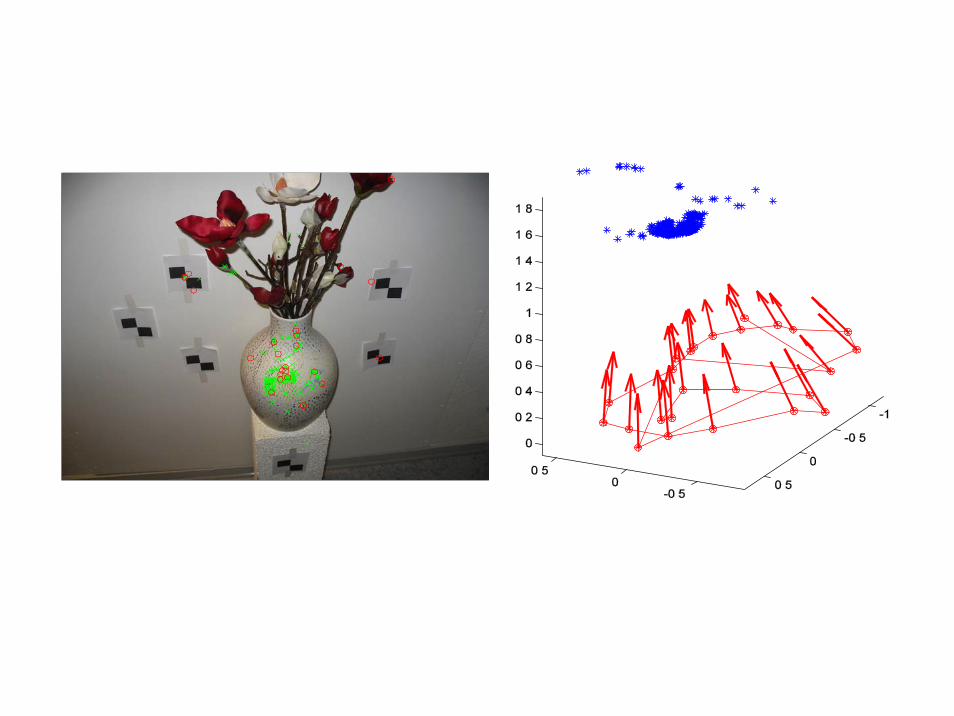
Triangulation/Resectioning:
d(u, PU) =
¯̄̄̄¯¯̄̄̄¯Ãu1 −
P1U
P3U, u2 −
P2U
P3U
!¯̄̄̄¯¯̄̄̄¯2
Homography estimation:
d(y,Hx) =
¯̄̄̄¯¯̄̄̄¯Ãy1 −
H1x
H3x, y2 −
H2x
H3x
!¯̄̄̄¯¯̄̄̄¯2
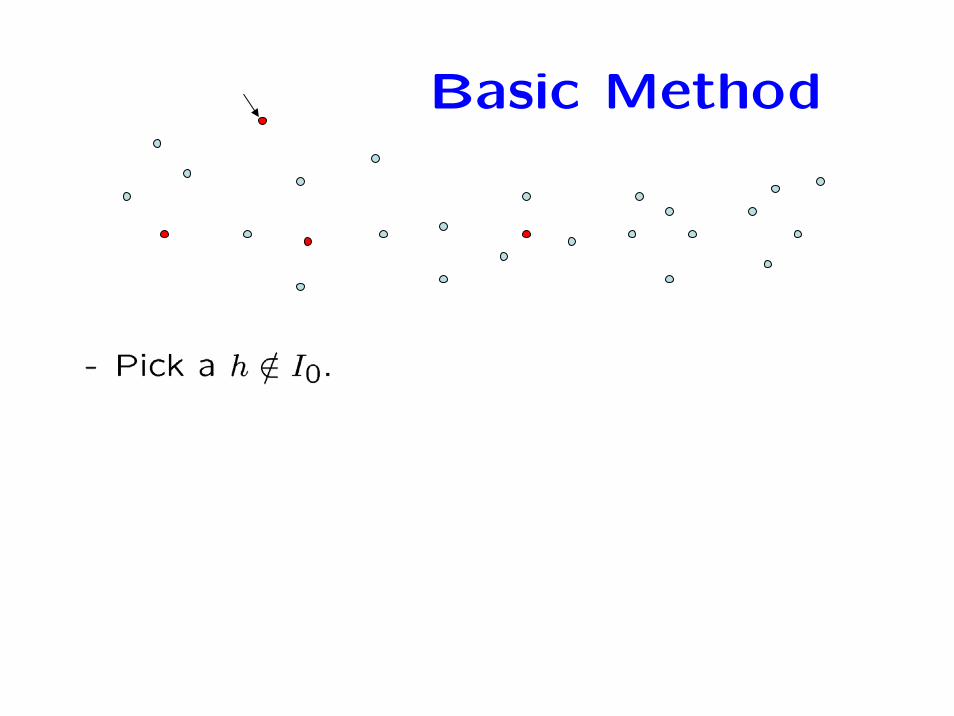
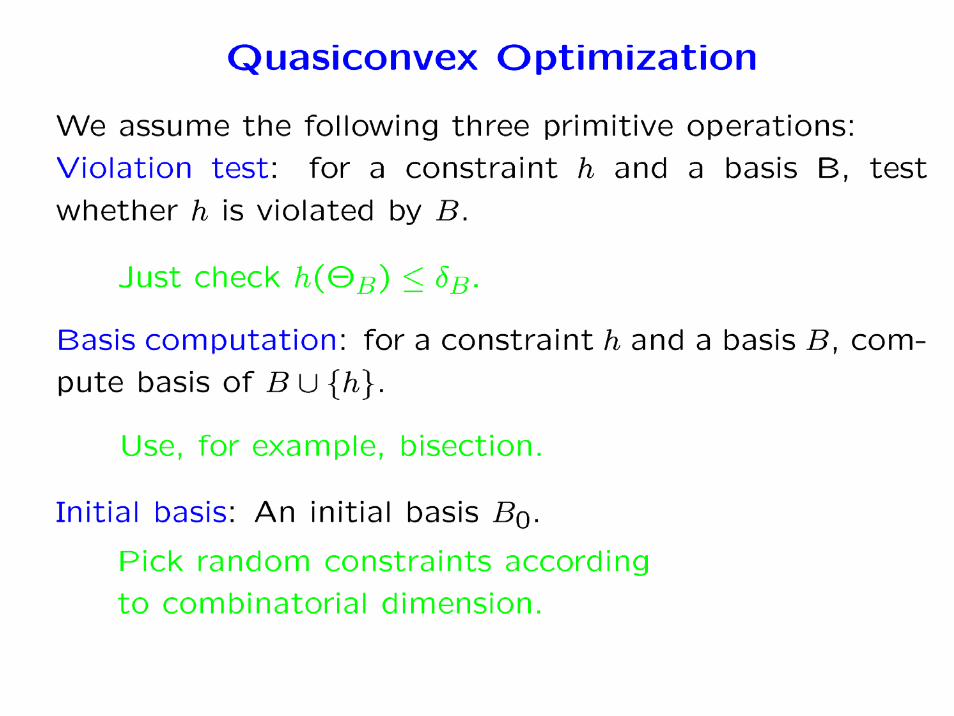
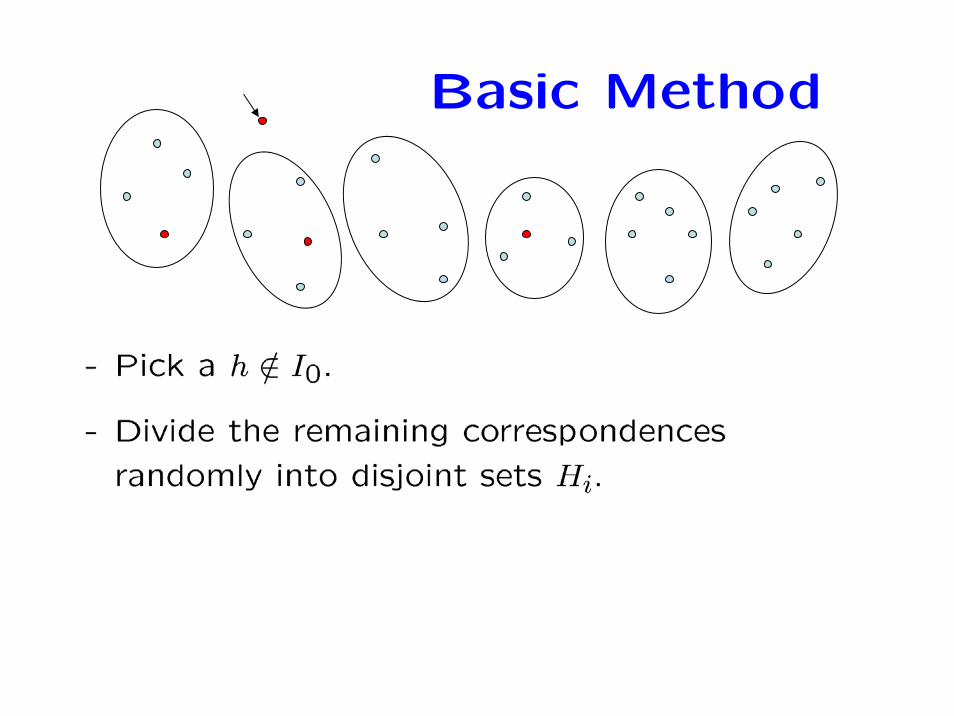
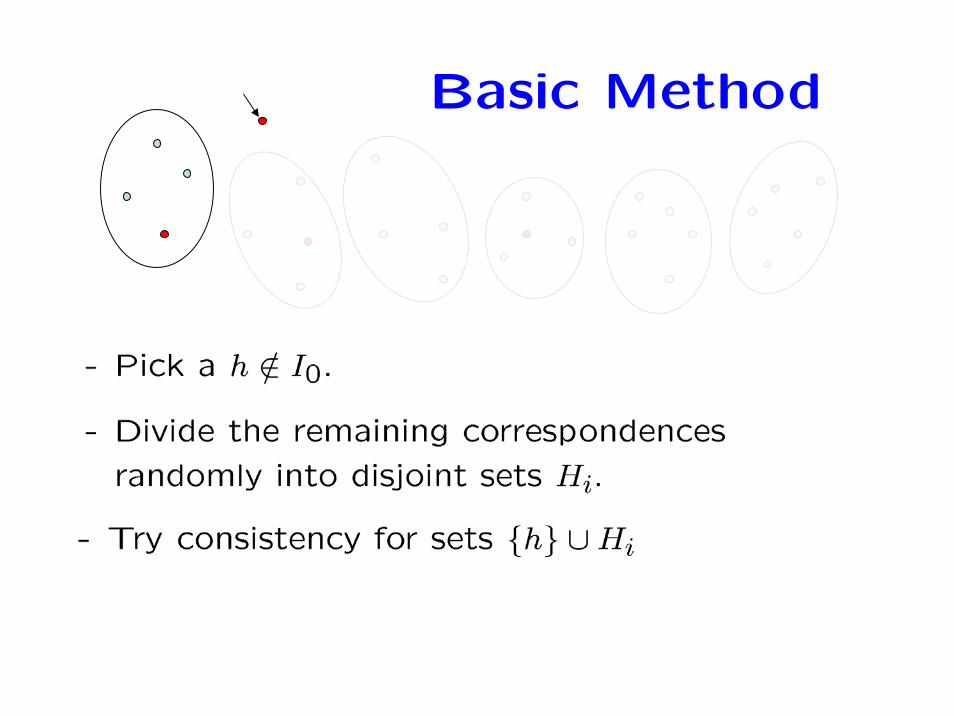
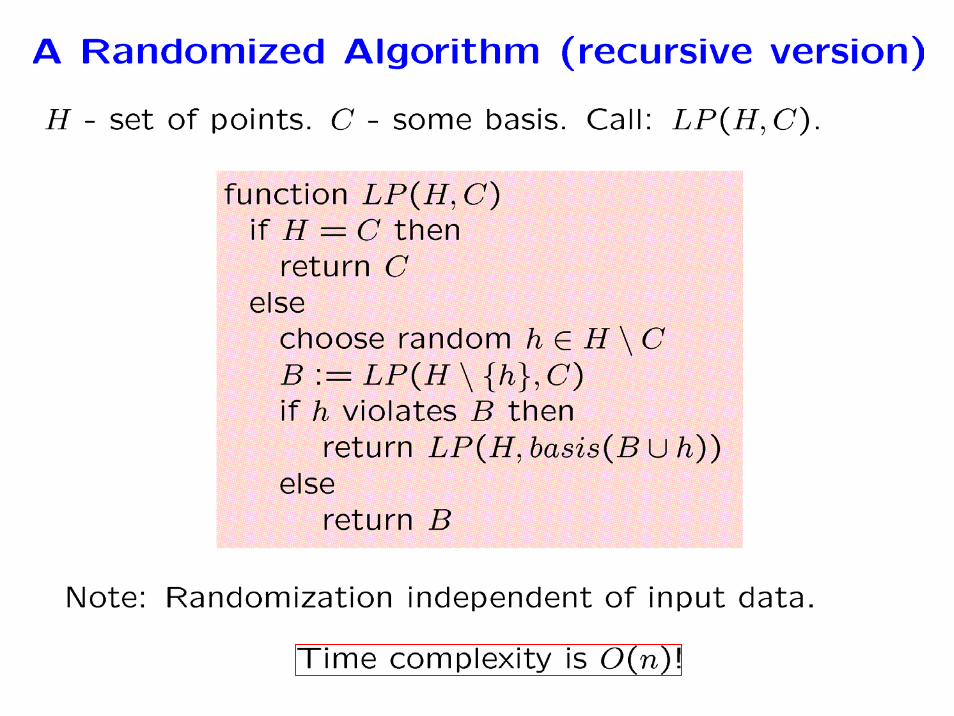
Basic Method
Basic Method
Basic Method
Basic Method
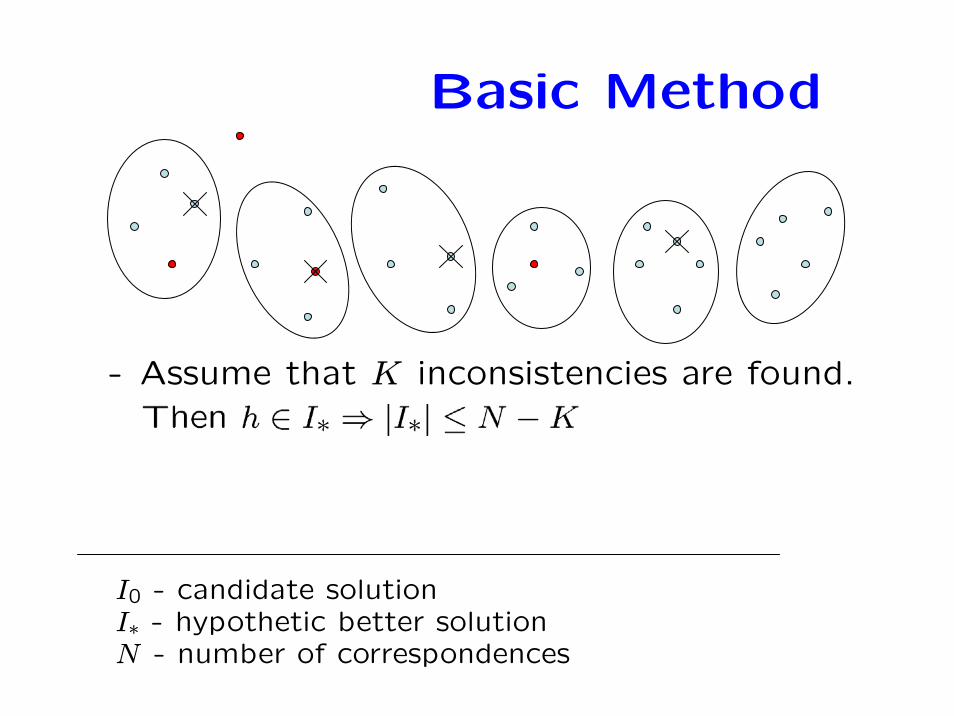
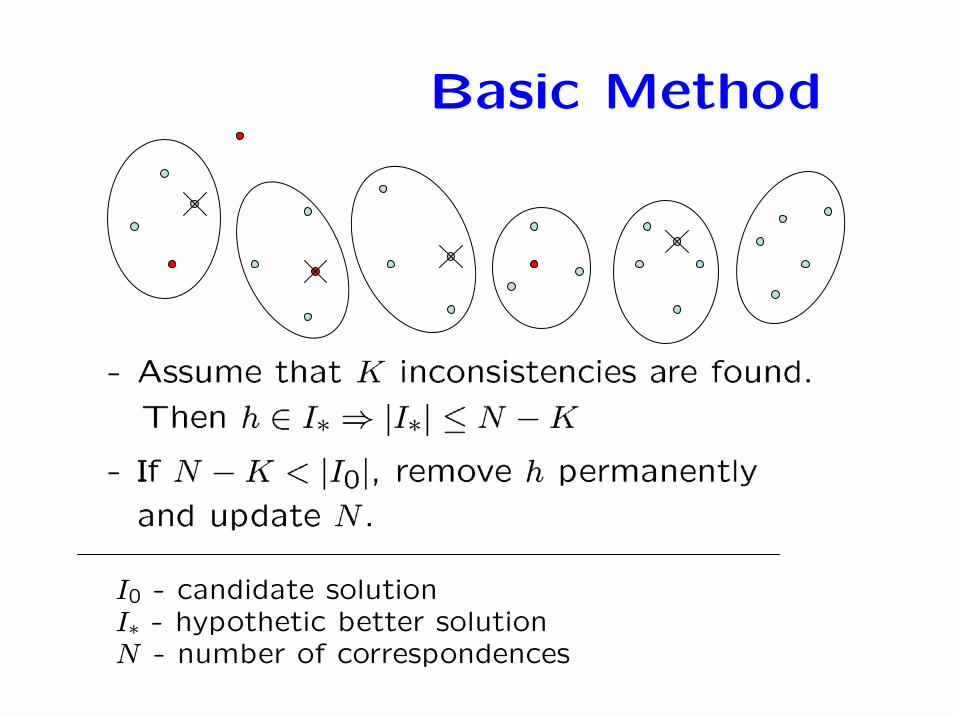
- Assume that K inconsistencies are found.
I0 - candidate solutionI∗ - hypothetic better solutionN - number of correspondences
Basic Method
I0 - candidate solutionI∗ - hypothetic better solutionN - number of correspondences
Limitations
Refined Method
For a set Hi of size n form all subsets Hijof size k < n.
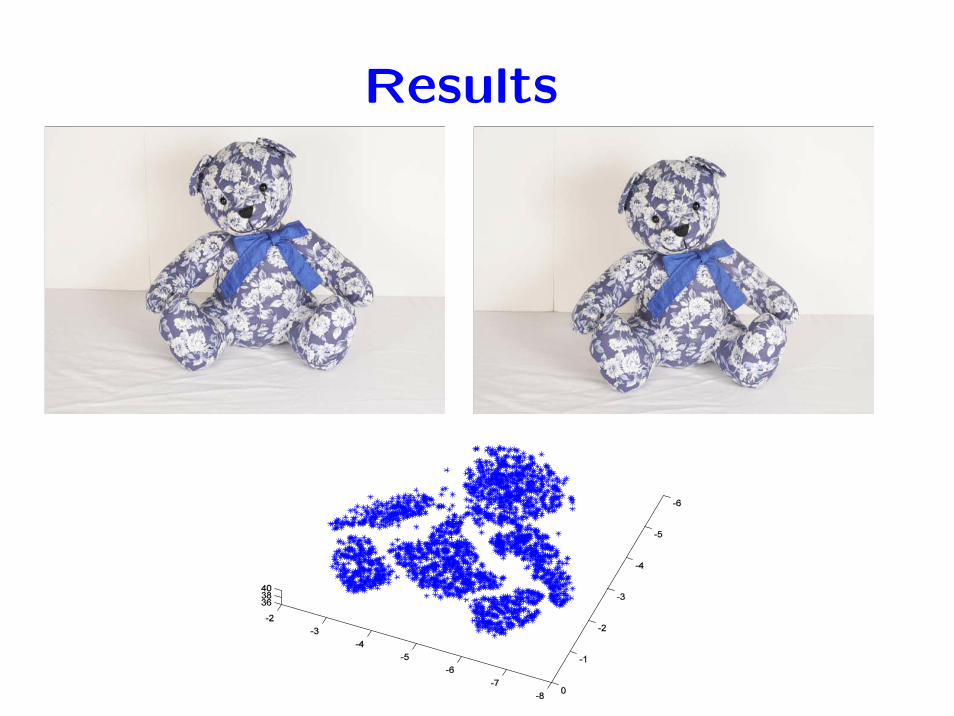
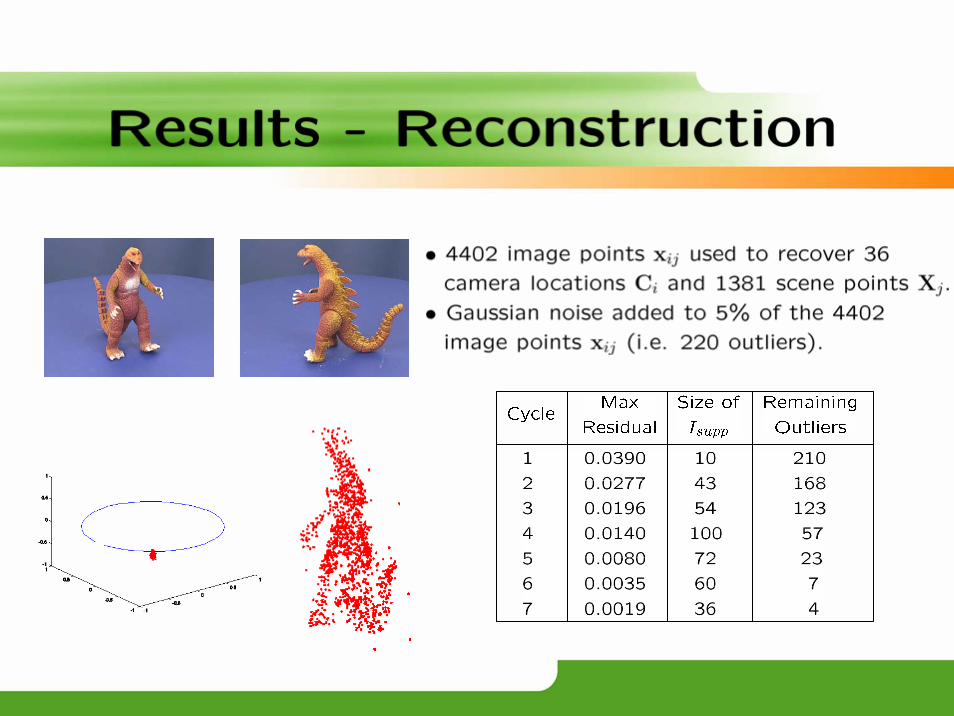
Results
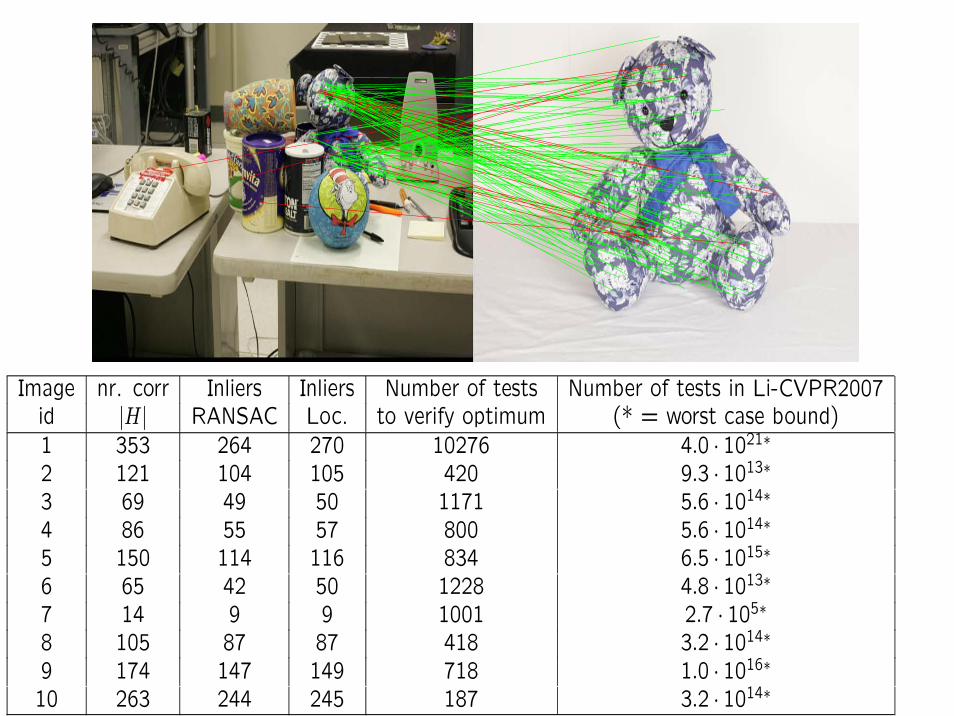
Image nr. corr Inliers Inliers Number of tests Number of tests in Li-CVPR2007id |H| RANSAC Loc. to verify optimum (* = worst case bound)1 353 264 270 10276 4.0 · 1021∗2 121 104 105 420 9.3 · 1013∗3 69 49 50 1171 5.6 · 1014∗4 86 55 57 800 5.6 · 1014∗5 150 114 116 834 6.5 · 1015∗6 65 42 50 1228 4.8 · 1013∗7 14 9 9 1001 2.7 · 105∗8 105 87 87 418 3.2 · 1014∗9 174 147 149 718 1.0 · 1016∗10 263 244 245 187 3.2 · 1014∗
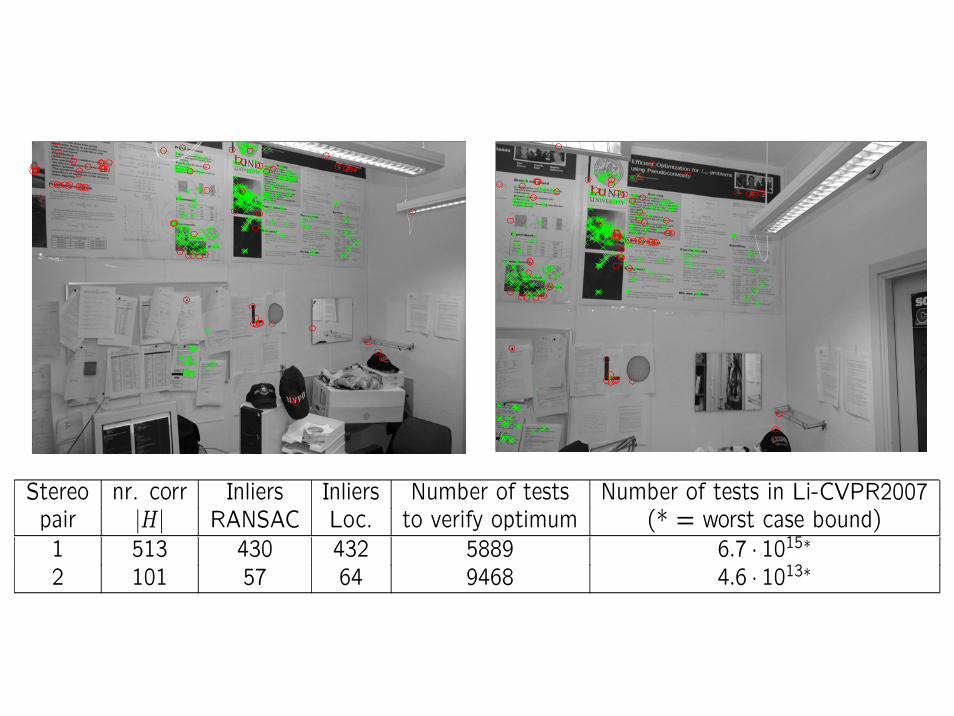
Stereo nr. corr Inliers Inliers Number of tests Number of tests in Li-CVPR2007pair |H| RANSAC Loc. to verify optimum (* = worst case bound)1 513 430 432 5889 6.7 · 1015∗2 101 57 64 9468 4.6 · 1013∗
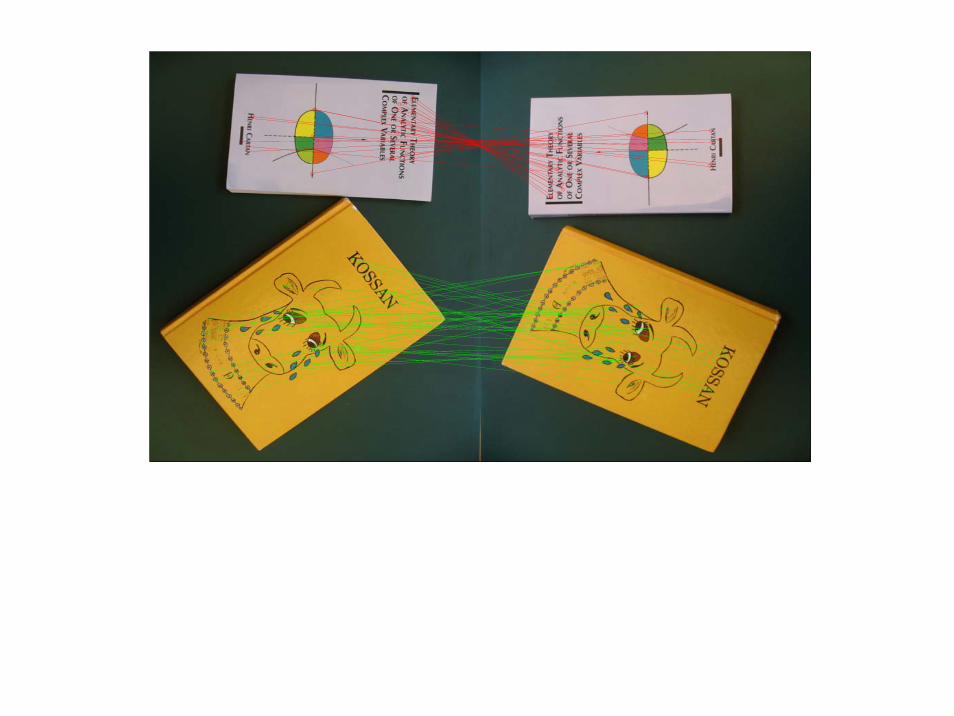
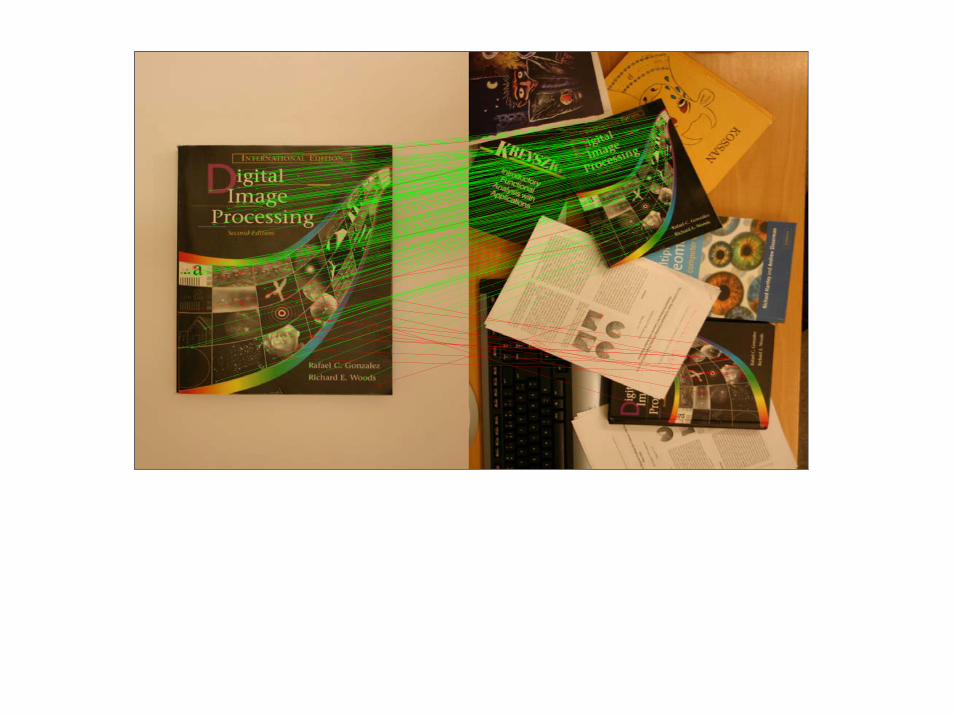
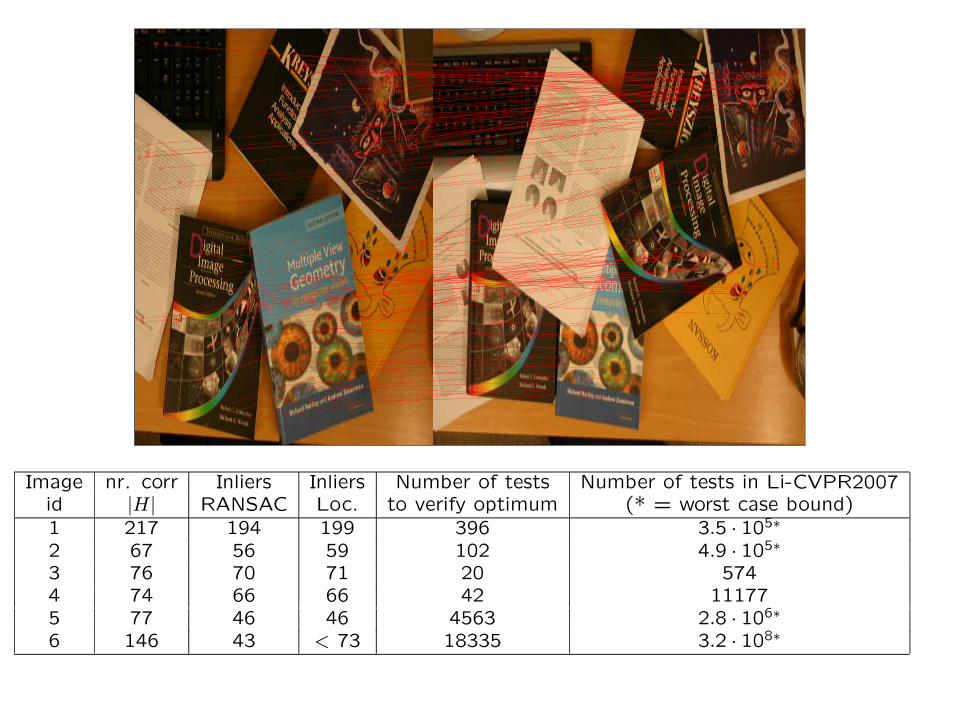
Image nr. corr Inliers Inliers Number of tests Number of tests in Li-CVPR2007id |H| RANSAC Loc. to verify optimum (* = worst case bound)1 217 194 199 396 3.5 · 105∗2 67 56 59 102 4.9 · 105∗3 76 70 71 20 5744 74 66 66 42 111775 77 46 46 4563 2.8 · 106∗6 146 43 < 73 18335 3.2 · 108∗

![Crecimiento óptimo: El Modelo de Cass-Koopmans … · sin consumo y en el segundo sin capital) θ t [] t t c r c σ = −θ ... tt tt t t t t t t. c Hc v w r e w r nv c.](https://static.fdocument.org/doc/165x107/5ba66e0109d3f263508bae94/crecimiento-optimo-el-modelo-de-cass-koopmans-sin-consumo-y-en-el-segundo.jpg)