Multibody Dynamics and coordinates of slider crank mechanism. ϕ B A C y C x C θ ϕ B Slider A...
128
Multibody Dynamics Spring 2018 www.mek.lth.se Education/Advanced Courses MULTIBODY DYNAMICS (FLERKROPPSDYNAMIK) (FMEN02, 7.5p) 1
Transcript of Multibody Dynamics and coordinates of slider crank mechanism. ϕ B A C y C x C θ ϕ B Slider A...

Multibody Dynamics Spring 2018
www.mek.lth.se Education/Advanced Courses
MULTIBODY DYNAMICS (FLERKROPPSDYNAMIK)
(FMEN02, 7.5p) 1

Course coordinator
• Prof. Aylin Ahadi, Mechanics, LTH • [email protected] • 046-2223039
• Prof. Emeritus Per Lidström
2

3
COURSE REGISTRATION Multibody Dynamics (FMEN02) Spring 2018 pnr efternamn förnamn email
Abramowitz Ryan [email protected] Adibi Pardis [email protected] Backstam Alexander [email protected] Berggren Jenny [email protected] Berglund Darell Olivia [email protected] Dalklint Anna [email protected] Eek Hofmann Ludvig [email protected] Foster John Stewart [email protected] Hellholm Linnea [email protected] Hodali Cabrera Felipe Javier [email protected] Hultgren Viktor [email protected] Iteka Rita [email protected] Jönsson Gustaf [email protected] Kingsley Albert [email protected] Lelorieux Virginie [email protected] Lindqvist Max [email protected] Lindström Malin [email protected] Nyberg Johannes [email protected] Ong Samuel [email protected] Persson Gustav [email protected] Sandell Karolina [email protected] Sarajärvi Marko [email protected] Schultheis Robin [email protected] Stenson Dennis [email protected] Svanberg Gustaf [email protected]

FUNDAMENTALS OF
MULTIBODY DYNAMICS
LECTURE NOTES
Per Lidström Kristina Nilsson
Division of Mechanics, Lund University
Multibody system (MSC ADAMS™)
4

Password: euler
Leonard Euler 1707-1783 5

6
Name Signature
Abramowitz Ryan
Adibi Pardis
Backstam Alexander
Berggren Jenny
Berglund Darell Olivia
Dalklint Anna
Eek Hofmann Ludvig
Foster John Stewart
Hellholm Linnea
Hodali Cabrera Felipe Javier
Hultgren Viktor
Iteka Rita
Jönsson Gustaf
Kingsley Albert
Lelorieux Virginie
Lindqvist Max
Lindström Malin
Nyberg Johannes
Ong Samuel
Persson Gustav
Sandell Karolina
Sarajärvi Marko
Schultheis Robin
Stenson Dennis
Svanberg Gustaf
COURSE BOOK RESERVATION (HARD COPY) Fundamentals of Multibody Dynamics, Lecture Notes SEK 350

Course program
7
Course literature: Lidström P., Nilsson K.: Fundamentals of Multibody Dynamics, Lecture Notes (LN). Div. of Mechanics, LTH, 2017. The ‘Lecture Notes’ will be on the Course web site. Hand out material: Solutions to selected Exercises, Examination tasks (Assignments), Project specification. Examples of previous written tests. Teacher: Prof. Aylin Ahadi (Lectures, Exercises, Course coordination) Phone: 046-222 3039, email: [email protected] Schedule (w. 1-7): Lectures: Monday 13 - 15 Tuesday 13 - 15 Thursday 10 - 12, room M:IP2 Exercises: Wednesday 8 - 10, room M:IP2

8

9

Course objectives and contents
10
Course objectives: The objective of this course is to present the basic theoretical knowledge of the Foundations of Multibody Dynamics with applications to machine and structural dynamics. The course gives a mechanical background for applications in, for instance, control theory and vehicle dynamics. Course contents: 1) Topics presented at lectures and in the “Lecture Notes”. 2) Exercises. 3) Examination tasks 4) Application project The scope of the course is defined by the curriculum above and the lecture notes (Fundamentals of Multibody Dynamics, Lecture Notes). The teaching consists of Lectures and Exercises: Lectures: Lectures will present the topics of the course in accordance with the curriculum presented above. Exercises: Recommended exercises worked out by the student will serve as a preparation for the Examination tasks. Solutions to selected problems will be distributed.

Examination
11

CONTENTS
1. INTRODUCTION 1 2. BASIC NOTATIONS 12 3. PARTICLE DYNAMICS 13
3.1 One particle system 13 3.2 Many particle system 27
4. RIGID BODY KINEMATICS 36 4.1 The rigid body transplacement 36 4.2 The Euler theorem 47 4.3 Mathematical representations of rotations 59 4.4 Velocity and acceleration 72
5. THE EQUATIONS OF MOTION 89 5.1 The Newton and Euler equations of motion 89 5.2 Balance laws of momentum and moment of momentum 94 5.3 The relative moment of momentum 99 5.4 Power and energy 100
6. RIGID BODY DYNAMICS 104 6.1 The equations of motion for the rigid body 104 6.2 The inertia tensor 109 6.3 Fixed axis rotation and bearing reactions 138 6.4 The Euler equations for a rigid body 143 6.5 Power, kinetic energy and stability 158 6.6 Solutions to the equations of motion: An introduction to the case of
7. THE DEFORMABLE BODY 172 7.1 Kinematics 172 7.2 Equations of motion 196 7.3 Power and energy 205 7.4 The elastic body 209
8. THE PRINCIPLE OF VIRTUAL POWER 217 8.1 The principle of virtual power in continuum mechanics 219
12

1. THE MULTIBODY 222 9.1 Multibody systems 222 9.2 Degrees of freedom and coordinates 224 9.3 Multibody kinematics 229 9.4 Lagrange’s equations 232 9.5 Constitutive assumptions and generalized internal forces 252
9.6 External forces 261 9.7 The interaction between parts 267 9.8 The Lagrangian and the Power theorem 295
10. CONSTRAINTS 300 10.1 Constraint conditions 300 10.2 Lagrange’s equations with constraint conditions 305 10.3 The Power Theorem 323
11. COORDINATE REPRESENTATIONS 327 11.1 Coordinate representations 328 11.2 Linear coordinates 331 11.3 Floating frame of reference 359 APPENDICES A1 A.1 Matrices A1 A.2 Vector spaces A6 A.3 Linear mappings A12 A.4 The Euclidean point space A37 A.5 Derivatives of matrices A45 A.6 The Frobenius theorem A54 A.7 Analysis on Euclidean space A56 SOME FORMULAS IN VECTOR AND MATRIX ALGEBRA EXERCISES
13

Mechanics in perspective
14
Quantum Nano Macro-Continuum Micro-meso -
Å nm µm mm
lengthscale

Prerequicites
15
Multibody Dynamics
Linear algebra
3D Analysis
Mechanics (Basic course
Continuum mechanics
Matlab
Finite element method
Mathematics Mechanics Numerical analysis
Synthesis

Content
16
Multibody Dynamics
Flexible bodies
Rigid bodies
Coordinates
Lagrange’s equations
Constraints
A multibody system is a mechanical system consisting of a number of interconnected components, or parts, performing motions that may involve large translations and rotations as well as small displacements such as vibrations.
Interconnections between the components are of vital importance. They will introduce constraints on the relative motion between components and in this way limit the possible motions which a multibody system may undertake.

Course objectives
Primary objectives are to obtain a thorough understanding of
♠ rigid body dynamics ♠ Lagrangian techniques for multibody systems
containing constraint conditions a good understanding of
♠ the dynamics multibodies consisting of coupled rigid bodies
some understanding of
♠ the dynamics of multibodies containing flexible structures 17

an ability to
♠ perform an analysis of a multibody system and to present the result in a written report
♠ read technical and scientific reports and articles
on multibody dynamics some knowledge of
♠ industrial applications of multibody dynamics
♠ computer softwares for multibody problems
18

Industrial applications
Aerospace
Automotive
Mechanism Robotics 19
Multibody system dynamics (MBS dynamics) is motivated by an increasing need for analysis, simulations and assessments of the behaviour of machine systems during the product design process.

Commercial MBS softwares
• Adams • Dads • Simpac • Ansys • Dymola/Modelinc • Simulink/Matlab • RecurDyn
20
Adams Student Edition Multibody Dynamics Simulation
https://www.youtube.com/watch?v=hd-cFu7yMGw

Multibody system
21
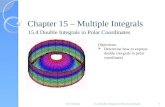
Classical steam engine equipped with a slider crank mechanism
Slider crank mechanism converts reciprocating translational motion of the slider into rotational motion of the crank or the other way around.

Multibody system
22
Figure 1.2 Steam engine with slider crank mechanism.
Slider
Connecting rod
Flywheel
Crank Revolute joint
Revolute joint
Fundament
Translatonal joint
The crank is connected to the slider via a rod which performs a translational as well as rotational motion. The connection between the slider and the rod is maintained through a so-called revolute joint and a similar arrangement connects the rod and the crank.

Multibody system
23
A schematic (topological) picture of the slider crank mechanism. The mechanism consists of three bodies; the slider, the crank and the rod. These are connected by revolute joints which allow them to rotate relative one another in plane motion. It is practical to introduce a fourth part, the ground, which is assumed to be resting in the frame of reference.

Joints in three dimentions
24
The revolute joint works like a hinge and allows two connected parts to rotate relative to one another around an axis, fixed in both parts.
A prismatic or translational joint allows two connected parts to translate relative to one another along an axis, fixed in both parts. The position of the slider can be measured by the single coordinate. We say that the prismatic joint has one degree of freedom.

Configuration coordinates Rigid part in plane motion, 3DOF
, ,C Cx yθConfiguration coordinates:
25

Multibody system
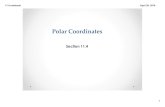
Figure 1.3 Topology and coordinates of slider crank mechanism.
ϕ B
A C
Cy
Cx
θ ϕ
B
A Slider
Crank
Rod
O
Bx
Guider Ground=
Ground
Og
, , , ,B C Cx x yθ ϕConfiguration coordinates:
4# Parts:
26

Greubler formula Two dimensional
( )m
ii 1
f 3 N 1 r=
= − − ∑
f
N
ir
Number of parts:
Number of degrees of freedom (DOF):
Number of DOF removed by joint i:
Number of joints: m
ir 2=Revolute joint: ir 2=Translational joint: 27
(including the ground)

Joints in three dimentions
( )m
ii 1
f 6 N 1 r=
= − − ∑
ir 5=ir 5=
28

Degrees of freedom and constraints
a) b)
Figure 1.5 a) Three-bar mechanism b) The double pendulum.
B
A D
C
Ground
θ
θ A
Ground
B ϕ
g
29

Greubler formula ( ) , m
ii 1
f 3 N 1 r f 1=
= − − ≥∑
Slider crank mechanism:
Three bar mechanism:
Double pendulum:
,N 4=
( )f 3 4 1 4 2 1= − − ⋅ =
( )f 3 4 1 4 2 1= − − ⋅ =
,m 4= ir 2=
,N m 4= = ir 2=
,N 3= ,m 2= ir 2=
( )f 3 3 1 2 2 2= − − ⋅ =
B
A D
C
Ground
θ
θ A
Ground
B ϕ
g
30

Biomechanics
Figure 1.6 Human locomotion.
Ground
,N 11= ,m 10= ir 2= ( )f 3 11 1 10 2 30 20 10= − − ⋅ = − =
31
A simple multibody model of a humanoid in plane locomotion

Constraints
, , , ,B C Cx x yθ ϕ
Configuration coordinates:
32
If the number of configuration coordinates is equal to the number of degrees of freedom of the system then we say that we use a minimal set of coordinates. Solutions to these equations represent the motion of the multibody system. However, using this approach will hide important information on the dynamics of the system. For instance, internal forces in the system, such as forces appearing in the joints, will not be accessible using a minimal set of coordinates.

Constraints
cos cos
sin sin
C
C
LR x 02
LR y 02
θ ϕ
θ ϕ
− + − = − − =
cos
sin
B C
C
Lx x 02
L y 02
ϕ
ϕ
− − = − =
Constraint at A: Constraint at B:
, , , ,B C Cx x yθ ϕConfiguration coordinates:
33
In order to be able to calculate these forces one has to increase the number of configuration coordinates and along with this introduce constraint conditions relating these coordinates in accordance with the properties of the joints between the parts.

Multibody dynamics - the analysis of a mechanical system results in a solution of a set of ordinary differential equations
34
• To set up the differential equations we need a geometrical description of the MBS and its parts including its mass distribution. (In the case of flexible parts we also need to constitute the elastic material properties of these parts.)
• We have to analyze the connections between parts in terms of their mechanical properties. Properties of the connections in the shape of joints will be represented by constraint conditions, i.e. equations relating the configuration coordinates and their time derivatives.
• Finally the interaction between the MBS and its environment has to be defined and given a mathematical representation. Based on the fundamental principles of mechanics; Euler’s laws and the Principle of virtual power we may then formulate the differential equations governing the motion of the MBS.
• The solution of these equations will, in general, call for numerical methods.

Multibody dynamics software Adams
Figure 1.7 Examples of MBS models in ADAMS®.
35

The rigid body -does not change its shape during the motion
ec
ec c c
m =
= + ×
F a
M I ω ω I ω
Figure 1.8 The rigid body.
ω
Pg
tB
c cPp
cv
36
This model concept may be considered to be the most important for MBS and many MBS are equal to systems of coupled rigid bodies.
The general motion of a rigid body thus has six degrees of freedom.
, ( )
P c cP
P c cP cP
P= + ×
∈ = + × + × ×
v v ω pa a α p ω ω p
is the inertia tensor of the body with respect to its centre of mass
The equations of motion
cI

The flexible body
( (tr ) ) ( )0
22e
1U dv X2
λ µ= +∫ E EB
37
Figure 1.9 The flexible body.
The elastic energy
Green-St.Venant strain tensor and Lame-moduli

, , ... , 1 2 nq q q q=
The Multibody kinematics
Slider
Connecting rod
Flywheel
Crank Revolute joint
Revolute joint
Fundament
( )U U q=
( ) , ,...,kk k kd T T U Q 0 k 1 ndt q q q
∂ ∂ ∂− + − = =
∂ ∂ ∂
( , )k kQ Q q q=
Configuration coordinates:
Kinetic energy: Potential energy:
Equations of motion: (Lagrange’s equations)
38
( , )T T q q=
expressed in terms of these coordinates and their time derivatives
Generalized force represents external forces on the system and internal contact forces between parts

Equations of motion under constraints
, ,...,n
k0 k
k 1g g q 0 1 m
=
+ = =∑ ν ν ν ( , )k kg g t qν ν=
Constraint equations: 1 m n≤ <
Equations of motion: ( ) , ,...,
, ,...,
mnonk kk k
1
nk
0 kk 1
d L L Q g 0 k 1 ndt q q
g g q 0 1 m
=
=
∂ ∂− − − = = ∂ ∂
+ = =
∑
∑
νν
ν
ν ν
λ
ν
L T U= −
( , , )non nonk kQ Q t q q=
( ), ,...,t 1 mν νλ λ ν= =
Lagrangian:
Nonconservative forces:
Constraint forces: 39
non-conservative forces including, for instance, friction.
, ,...,m
kck k
1Q g k 1 nν
νν
λ=
= =∑ reaction forces due to the kinematical constraints

Chapter 3: Particle Dynamics
is left for self study and recapitulation of basic concept i mechanics.
You may try to solve some of the exercises but don’t spend to much time on this introductory chapter!
m v
1F
40

41
Euclidean space
, , ...x y z ∈E Points in Euclidean space
y x− = ∈u V Vectors in Translation vector space
y x= + u
dim( ) 3=V ( )1 2 3=e e e e basis
( ) [ ]1
1 1 2 2 3 3 1 2 3 2
3
aa a a a
a
= + + = =
ea e e e e e e e a

42
Cartesian coordinate system
o ∈E Fixed point, ( )1 2 3=e e e e Fixed basis
[ ] [ ]ox 1 1 2 2 3 3 oxx o o x x x o o x= + = + + + = + = +e er e e e e r e
o′∈E Fixed point, ( )1 2 3=f f f f Fixed basis
[ ]x o x′= + ff [ ]o o o′ ′= + ee
[ ] [ ] [ ] [ ] ([ ] [ ] )x o o x o x x x o′ ′= + + = + ⇒ = −e f e f e ee f e f e
, , det3 3B B B 0×= ∈ ≠f e R

43
[ ] ([ ] [ ] ) [ ] [ ] [ ]B x x o B x x o′ ′= − ⇔ = −f e e f e ee e
[ ] ([ ] [ ] )1x B x o− ′= −f e e
Cartesian coordinate system
Transformation of coordinates for points
[ ] ([ ] [ ] )x B x o= −e f f

44
What about vectors?
[ ] ,= ea e a [ ] ,= fa f a B=f e
[ ] [ ] [ ] [ ] [ ]B B= = = ⇔ =f f e e fa f a e a e a a a
[ ] [ ] , [ ] [ ]1B B−= =e f f ea a a a
∈a V

45
What about tensors?
[ ] ,= eAe e A [ ] ,= fAf f A B=f e
[ ] [ ]1B B−=f eA A
[ ] [ ] 1B B−=e fA A
( )End∈A V
TB = e f

46
( )1 2 3=e e e e
Orthonormal basis
i j ij
1 i j0 i j
δ=
⋅ = = ≠e e
( )1 1 1 1 2 1 3
T2 1 2 3 2 2 2 2 2 3
3 3 1 3 2 3 3
1 0 00 1 00 0 1
⋅ ⋅ ⋅ = ⋅ = ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅
e e e e e e ee e e e e e e e e e e e
e e e e e e e
T3 3I ×=e e

47
( ) ,1 2 3=e e e e
Orthonormal bases
, detT3 3B B I B 1×= = ±
( )1 2 3=f f f f
B=f e
Orthonormal matrix

48
The tensor product
( )End⊗ ∈a b V, ∈a b V,
( ) ( )⊗ = ⋅a b u a b uDefinition:
Notation:

49
The vector product
× ∈a b V, ∈a b V,
( )× = ×a 1 u a uDefinition:
Notation:
b
θ
×a b
a
( )Skew× ∈a 1 V, ( ),End∈ ∈a 1V VNotation:
sinθ× =a b a b

50
[ ]( , , )det det( , , )
VV
= =e
Qa Qb QcQ Qa b c
The determinant
( )1 2 3=e e e eON-basis:

Chapter 4 :Rigid body kinematics
( ) , ,AB t constant A B= ∀ ∈p Rigidity condition:
51

4.1 Rigid body transplacement
( ), A A Aχ= ∈p r 52
Position vectors We choose a material point A as a reference point, called reduction point.
𝜒(𝐫𝐴)
𝜒(𝐫𝐴) - mapping called transplacement

Rigid body transplacement
( ) : ( ) ( ), *A A AR = + − ∈a r a r aχ χ V ( )
( ) ( ) , ,B A B A A Bχ χ− = − ∀ ∈r r r r
( ), A A Aχ= ∈p r
Rigidity condition:
Transplacement:
( )( ) ( ) , ,
( ) ,
A
A A
A
RR R
R
=
− = − ∀ ∈ = ∀ ∈
0 0a b a b a b
a a a
V
V
53 Isometric mapping – the lenght of a vector does not change!
Introduce a mapping defined by:
Fix point A – reduction point
The mapping has the following properties:

( ) ( ) ( ), , , ,A A AR R R+ = + ∈ ∈a b a b a bα β α β α βV
Rigid body transplacement
Linearity:
( )A AR =a R a
Isometry implies orthonormality. ,T T
A A A A= =R R R R 1V1 T
A A− =R R
Notation for linear mapping: (we drop the parantheses)
54
Isometric mapping is linear:
R is an orthonormal transformation:
A B =R aR b a.b
The angle between the vectors does not change. Both lenght and angle are preserved!
ℝ
𝑑𝑑𝑑 𝐑𝐴 2 = 1 two possibilities Adet 1= ±R

Rigid body transplacement
( ) ( ) , A A Aχ χ+ = + ∈r a r R a a V
P A= −a r r
( ) ( ) ( )P A A P Aχ χ= + −r r R r r
( )P A A P A− = −p p R r r
AP A AP=p R r
Reference placement
Present placement
55
Start with: From (*) follows:

Rigid body transplacement
AB A AB=p R r ( )A SO∈R V
56
Rotation tensor

( ) ( ) ( )P A A P Aχ χ= + −r r R r r
57
Changing the reduction point
( ) ( ) ( )P B B P Bχ χ= + −r r R r r
What is the relationship between and ? AR BR
B A= −b r r
( ) ( ) ( ) ( ) ( ) ( )B B B A A A Aχ χ χ χ χ χ= + − = + + − + = + + − −R a r a r r a b r b r a b r
( ( ) ( )) ( )A A A A A A A Aχ χ+ − = + − = + − =r b r R a b R b R a R b R b R a
We may thus conclude that
, ,A B A B= = ∀ ∈R R R
The orthogonal transformation representing a transplacement of a rigid body is independent of the reduction point!
What now, if we change the reduction point from A to B?

( ) ( ) , B B Bχ χ+ = + ∈r a r R a a V
Rigid body transplacement
( ) ( ) , A A Aχ χ+ = + ∈r a r R a a V
?B A=R R
Does the rotation tensor depend on the reduction point?
!B A= =R R R
58
No!

Rigid body transplacement
59
The displacement
( ) ( )A A A A A= − = −u r p r r rχ

Rigid body transplacement
Theorem 4.1 A rigid body transplacement is uniquely determined by the displacement of (an arbitrary) reduction point A; Au and an orthonormal transformation ( )SO∈R V which is independent of the reduction point.
( )P A AP= + −u u R 1 r
60

61

Summary
Box 4.1: Rigid body transplacement
: :
: detA
A reduction pointdisplacement of the reducion point A
orthogonal transformation with 1=uR R
( ) ( )( )A A= = + − −u u r u R 1 r r
( ) ( ) ( )A Aχ χ= = + −p r r R r r
62

The translation
=R 1 63
What does the associated orthonormal tensor look like?
( )P A AP= + −u u R 1 r
( )− =R 1 a 0
A translation of a body is a transplacement where all displacements are equal, irrespective of the material point, i.e. , ,A B 0 A B= = ∀ ∈u u u

The translation
, , ,A B 0 A B= = ∀ ∈u u u
64

The rotation
( , )A nRotation axis:
65
Decomposition: ( )AB AB AB⊥= + ⋅r r n n r
Then we write AB 1 1 2 2⊥ = +r i ix x
Consider a rotation of the body around a fixed axis in space through the point
introduce a Right-handed Ortho-Normal basis (a ‘RON-basis’)
( )1 2 3=i i i i
3 =i n

The rotation Figure 4.9 Rotation around a fixed axis.
1i 2i AB
⊥r
A g
Bg
3 =i n A g
1e 2e ϕ
Bg
AB⊥p
3 3= =e i n 1x
2x
( )AB AB AB⊥= + ⋅r r n n r
AB 1 1 2 2⊥ = +r i ix x
( )AB AB AB⊥= + ⋅p p n n p
AB 1 1 2 2⊥ = +p e ex x
( )2 2 2AB AB 1 2 AB= = + + ⋅r p n rx x
66
The vector corresponding to in the present placement is: ABr

The rotation
Figure 4.9 Rotation around a fixed axis.
1i 2i AB
⊥r
A g
Bg
3 =i n A g
1e 2e ϕ
Bg
AB⊥p
3 3= =e i n 1x
2x
cos sin( sin ) cos ,
1 1 2
2 1 2
3 3
0 2ϕ ϕ
ϕ ϕ ϕ π= +
= − + ≤ < = =
e i ie i ie i n
67
( ), 1 2 3 3= =e e e e e n is a RON-basis. This basis is related to by i
This can be expressed in matrix format.

The rotation matrix
[ ]=i
e i R
[ ]cos sinsin cos
00
0 0 1
ϕ ϕϕ ϕ
− =
iR
[ ] [ ] [ ] [ ] [ ],T T= =i i i i
R R R R 1 [ ]det 1=i
R
cos sin( ) ( ) sin cos ,1 2 3 1 2 3
00
0 0 1
ϕ ϕϕ ϕ
− =
e e e i i i
68
The matrix representation of the rotation R is called the canonical represenataion.

1 1
2 2
3 3 3
= = = = =
Ri eRi eR i e i n
[ ]= =i
R i e i R
AB AB=p Rr
The rotation tensor
69
Now let R be the tensor defined by:
( ) ( ) ( ( ))AB AB AB 1 1 2 2 AB 1 1 2 2 AB AB⊥= + ⋅ = + + ⋅ = + + ⋅ =p p n n r Ri Ri Rn n r R i i n n r Rrx x x x
which means that the rotation is a rigid transplacement

Summary
Box 4.3: Rotation
[ ]
( , ) : :
: cos sin
: , sin cos
: ( ) :
A
1 2 3
A rotation axisA reduction point
displacement of the reduction point A0
orthonormal transformation 00 0 1
rotation angle 0 2referen
ϕ ϕϕ ϕ
ϕ ϕ π
=
− =
≤ <=
i
n
u 0
R R
i i i i , 3 3tial base = =i n e
70

The Euler theorem
Theorem 4.2 (The Euler theorem, 1775) Every rigid transplacement with a fixed point is equal to a rotation around an axis through the fixed point.
71

The canonical representation
=Rn nλ
( ), 1 2 3 3= =i i i i i n
72
𝐢 is vector perpendicular to 𝐧
The transplacement is given by:
, AB AB B= ∀ ∈p Rr
We now try to find out if there are any points C with the property:
AC AC AC= =p Rr r
If this is true then there are material vectors unaffected by the transplacement. This brings us to the eigenvalue problem for the tensor R

[ ] [ ]( ) det( ) det( )p λ λ λ= − = − =R i1 R 1 R
cos sindet sin cos ( )(( cos ) sin )2 2
00 1
0 0 1
λ ϕ ϕϕ λ ϕ λ λ ϕ ϕ
λ
− − − = − − + −
,( ) , i1 2 3p 0 1 e ϕλ λ λ ±= ⇔ = =R
The characteristic equation, eigenvalues
73

The canonical representation =Rn nλ
[ ]cos sinsin cos
00
0 0 1
ϕ ϕϕ ϕ
− =
iR
( ), 1 2 3 3= =i i i i i n
74
[ ]=i
R i i R
[ ]cos sin
( ) sin cos1
T1 2 3 2
3
00
0 0 1
ϕ ϕϕ ϕ
− = = =
i
iR i R i i i i i
i
Eigen value problem: find a material points C such that is an eigenvector to R with the corresponding eigenvalue 1.
, 31= =i nλ
𝐢 is vector perpendicular to 𝐧
ACr

75
( cos + sin ) +( ( sin )+ cos ) )1 2 1 1 2 2 3 3ϕ ϕ ϕ ϕ⊗ − ⊗ + ⊗ =i i i i i i i i
( ) cos ( )sin3 3 1 1 2 2 2 1 1 2= ⊗ + ⊗ + ⊗ + ⊗ − ⊗R i i i i i i i i i iϕ ϕ
( cos + sin ( sin )+ cos )1
1 2 1 2 3 2
3
ϕ ϕ ϕ ϕ − =
ii i i i i i
i
The canonical representation
cos sin( ) sin cos
1
1 2 3 2
3
00
0 0 1
ϕ ϕϕ ϕ
− = =
ii i i i
i
cos ( ) sinϕ ϕ⊗ + − ⊗ + ×n n 1 n n n 1
Equivalent to the following tensor-product representation of R

Summary
Box 4.5: Rigid transplacement
: : :
: :
A
A
A reduction pointposition vector of the reduction point in the reference placementdisplacement of the reducion pointposition vector of a material point in the reference placement
p
rurp
: osition vector of a material point in the present placement
rotation tensorR
{( ) ( )A A Atranslation rotation
χ= = + + −p r r u R r r14 2 43
76

Screw representation of the transplacement
Screw line
{ }, S A ASS σ σ⊥= ∈ = + + ∈r r r n ¡SL
Theorem 4.3 (Chasles’ Theorem, 1830) Every transplacement of a rigid body can be realized by a rotation about an axis combined with a translation of minimum magnitude parallel to that axis. The reduction point for this so-called screw transplacement is located on the screw line given in (4.28).
( ) , ( cos )
TA
AS 02 1
ϕϕ
⊥ −= − ≠
−R 1 ur
( )S Ss= + + −p r n R r r
77
Since the translation changes with the reduction point A and the rotation R is independent of this choice we may ask if there is a specific reduction point S such that the displacement is parallel to the rotation axis.
Au
Su

The special orthogonal group
The set of all orthonormal tensors on V forms an algebraic group, the orthonormal group, { }( ) T TO = =Q Q Q QQ 1= V
Being a group means that
, ( ) ( )
( )( )
1 2 2 1
1 T
O OO
O−
∈ ⇒ ∈∈
= ∈
Q Q Q Q1Q Q
V VV
V
However, in general we have 1 2 2 1≠Q Q Q Q and we say that the operation of combining orthonormal tensors is non-commutative. The set of all rotations forms a subgroup in ( )O V called the special orthonormal group { }( ) ( ) detSO O 1∈ =R R= V V
78

Non-commutativity of rotations
79
Combining rotations is thus a non-commutative operation as can be seen from the figure below. The special orthonormal group has the mathematical structure of a so-called Lie-group.

Chapter 4.3 The main representation theorem
80
This representation is mainly unique. If =R 1 then n may be arbitrarily chosen, while ( )0 modulo 2ϕ π= . If ≠R 1 then n is uniquely determined, apart from a factor 1± . For a
given n the angle ϕ is uniquely determined ( )modulo 2π . For a definition of the tensor ( )End× ∈a 1 V see Appendix A.4.39.
Theorem 4.1 To every rotation tensor ( )SO∈R V there exists a unit vector n and an angle ϕ ∈ ¡ so that
( , ) cos ( ) sinϕ ϕ ϕ= = ⊗ + − ⊗ + ×R R n n n 1 n n n 1

( )1 2 3=e e e e [ ]1
2
3
nnn
=
en[ ]=
en e n
The main representation theorem using components
[ ] [ ] [ ] ( )1 1 1 1 2 1 3
T2 1 2 3 2 1 2 2 2 3
3 3 1 3 2 3 3
n n n n n n nn n n n n n n n n nn n n n n n n
⊗ = = =
e e en n n n
[ ] [ ] [ ]3 2
3 1
2 1
0 n nn 0 nn n 0
− × = × = − −
e e en 1 n 1
82
( , ) cos ( ) sinϕ ϕ ϕ= = ⊗ + − ⊗ + ×R R n n n 1 n n n 1

The main representation theorem using components
[ ] [ ] [ ] [ ]cos ( ) sinϕ ϕ= ⊗ + − ⊗ + × =e e e e
R n n 1 n n n 1
[ ] [ ] [ ] [ ] [ ] [ ]cos ( ) sinT Tϕ ϕ+ − + ×e e e e e e
n n 1 n n n 1
cos ( ) sinϕ ϕ= ⊗ + − ⊗ + ×R n n 1 n n n 1
( )1 2 3=e e e e [ ]1
2
3
nnn
=
en[ ]=
en e n
83

How to calculate the rotation axis n and the rotation angle 𝜑 from the rotation tensor R
[ ] [ ] [ ] [ ]( ) ( )= ⇔ − = ⇔ − =b b
Rn n R 1 n 0 R 1 n 0
[ ] 11 12 13
3 321 22 23
31 32 33
R R RR R RR R R
×
= ∈
bR
, ?ϕ→R n
[ ] 1
3 12
3
nnn
×
= ∈
bn
( )1 2 3=b b b b
84
cos ( ) sinϕ ϕ= ⊗ + − ⊗ + ×R n n 1 n n n 1
ℝ ℝ
arbitrary RON-basis
Eigenvalue problem

85
The eigenvalue problem
11 12 13 1
21 22 23 2
31 32 33 3
R R R n 0R R R n 0R R R n 0
λλ
λ
− − = −
,( ) , i1 2 3p 0 1 e ϕλ λ λ ±= ⇔ = =R
cos , sin2 3 2 3
2 2iλ λ λ λϕ ϕ+ −
= =
( ) det11 12 13
21 22 23
31 32 33
R R Rp R R R
R R R
λλ λ
λ
− = − −
R

The eigenvalue problem
11 12 13 1 1
21 22 23 2 2
31 32 33 3 3
R 1 R R n 0 nR R 1 R n 0 nR R R 1 n 0 n
− − = ⇒ ⇒ −
n
cos11 22 33tr R R R 1 2 ϕ= + + = +R
arccos( ) arccos( )
arccos( )
11 22 33
11 22 33
R R R 1tr 12 2
R R R 122
ϕπ
+ + −− == + + − −
R
86
1 1λ =
[ ]cos sinsin cos
00
0 0 1
− =
Rϕ ϕϕ ϕ

Coordinate representations of ( )SO V
• Euler angles • Bryant angles • Euler parameters • Quaternions • ……
87

88
Euler angles: ( , , )ψ θ φ
Present placement Reference placement
[ ] oo o= =
ee Re e R

89
01e
02e
03 3=f e
1f
2f
ψ
Factorization:
3g 3f
1 1=g f
2f
θ 2g
( , , )ψ θ φ
2e
1e φ
3 3=e g
1g
2g
( ) ( ) ( )3 1 3φ θ ψ=R R R R
( )3 ψR ( )1 θR ( )3 φR
Every rotation may be written as a product of three simple rotations.

Euler angles: First rotation
01e
02e
03 3=f e
1f
2f
ψ
[ ]cos sin
( ) sin coso3
00
0 0 1
ψ ψψ ψ ψ
− =
eR[ ]( ) ( ) ,o
o o3 3ψ ψ= =
ef R e e R
ψ
( )
( )
0 0 0 01 2 3
1 2 3
=
↓=
e e e e
f f f f
90
We start the factorization by introducing the first rotation which brings the base to the base by rotating around the axis with direction angle .
( ) o3 3ψ ψR e:
oe ( )1 2 3=f f f f oe o3e
ψ

Euler angles: Second rotation
3g 3f
1 1=g f
2f
θ 2g
[ ]( ) cos sinsin cos
1
1 0 000
θ θ θθ θ
= −
fR[ ]( ) ( ) ,1 1θ θ= =
fg R f f R
θ
( )
( )
1 2 3
1 2 3
=
↓=
f f f f
g g g g
91
Next we take the rotation which brings to the RON-basis by a rotation with the angle around an axis with the direction , the so-called intermediate axis.
( )1 1θ θR f: f ( )1 2 3=g g g gθ 1f

Euler angles: Third rotation
2e
1e φ
3 3=e g
1g
2g
[ ]( ) ( ) ,3 3φ φ= =g
e R g g R [ ]cos sin
( ) sin cos3
00
0 0 1
φ φφ φ φ
− =
gR
φ
( )
( )
1 2 3
1 2 3
=
↓=
g g g g
e e e e
92
Finally we take the rotation which brings to the final basis by a rotation the angle around an axis with direction .
( )3 3φ φR g: g eφ 3g

93
Euler angles: All rotations in combination
[ ][ ]
[ ]
( ) ( )
( ) ( )
( ) ( )
oo o
3 3
1 1
3 3
ψ ψ
θ θ
φ φ
= = = =
= =
e
f
g
f R e e R
g R f f R
e R g g R
[ ] [ ] [ ] [ ] [ ] [ ][ ]
( ) ( ) ( ) ( ) ( ) ( )o
o
o o3 1 3 3 1 3= = = =
e
g f g e f g
R
e Re g R f R R e R R R
φ θ φ ψ θ φ
⇓
[ ] [ ] [ ]( ) ( ) ( ) ( ) ( ) ( )oo o o
3 1 3 3 1 3φ θ ψ ψ θ φ= = =e f g
e Re R R R e e R R R
Re-substitution yields:

Euler angles: The rotation
[ ] [ ] [ ] [ ]( ) ( ) ( )o o3 1 3ψ θ φ= =e e f g
R R R R
cos sin cos sinsin cos cos sin sin cos
sin cos
0 1 0 0 00 0 0
0 0 1 0 0 0 1
ψ ψ φ φψ ψ θ θ φ φ
θ θ
− − − =
cos cos sin cos sin cos sin sin cos cos sin sinsin cos cos cos sin sin sin cos cos cos cos sin
sin sin sin cos cos
ψ φ ψ θ φ ψ φ ψ θ φ ψ θψ φ ψ θ φ ψ φ ψ θ φ ψ θ
θ φ θ φ θ
− − − + − + −
oψ φθ→ → →e f g e
94

Euler angles
1f
3e 2e
1e
03e
01e
02e
Theorem 4.2 A rotation R is determined by a set of three real coordinates, called the Euler angles: ( , , ) , , , 3 0 2 0 0 2ψ θ φ ψ π θ π φ π∈ ≤ < ≤ ≤ ≤ <¡ . Conversely these angles are essentially determined by R . In fact the angle [ ],0θ π∈ is uniquely determined by R . If
] [,0θ π∈ then also [ [, ,0 2ψ φ π∈ are uniquely determined by R . When 0θ = only ψ φ+ is uniquely determined and when θ π= only ψ φ− .
95
ℝ

[ ]cos cos sin sin cos sin sin cossin cos cos sin sin sin cos coso
00
0 0 1
ψ φ ψ φ ψ φ ψ φψ φ ψ φ ψ φ ψ φ
± − ± = ± − ± = ±
eR
cos( ) sin( )sin( ) cos( )
11 12 13
21 22 23
31 32 33
0 R R R0 R R R
0 0 1 R R R
ψ φ ψ φψ φ ψ φ
± − ± ± − ± = ±
Euler angles: Singularity
Only is determined. Singular!ψ φ±
,0θ π=
96
Special case:

Euler angles: Singularity
cos , sin cos
cos , sinsin sin
cos , sinsin sin
233
23 13
32 31
R 1R R
R R
θ θ θ
ψ ψθ θ
φ φθ θ
= = −
= − =
= =
[ ] o
11 12 13
21 22 23
31 32 33
R R RR R RR R R
= =
eR
cos cos sin cos sin cos sin sin cos cos sin sinsin cos cos cos sin sin sin cos cos cos cos sin
sin sin sin cos cos
ψ φ ψ θ φ ψ φ ψ θ φ ψ θψ φ ψ θ φ ψ φ ψ θ φ ψ θ
θ φ θ φ θ
− − − + − + −
⇒, singular0θ π=
97
These formulas show that numerical difficulties are to be expected for values of close to . θ , , ,..n n 0 1π =

The rotation angle
( cos )cos( ) coscos 1 12
θ φ ψ θϕ + + + −=
cos ( cos )cos( ) costr 1 2 1ϕ θ φ ψ θ= + = + + +R
Figure 4.5 The gyroscope.
ψ
φ
θ
98

Chapter 4.3.3 Euler parameters
sin ( ) sin cos22 22 2 2ϕ ϕ ϕ
= + × × + ×R 1 n n 1 n 1
cos , sin0e2 2ϕ ϕ
= =e n
cos ( ) sinϕ ϕ= ⊗ + − ⊗ + × =R n n 1 n n n 1
( cos )( ) sin1 ϕ ϕ+ − ⊗ − + ×1 n n 1 n 1
cossin2 12 2ϕ ϕ−
= sin sin cos22 2ϕ ϕϕ =
99
𝑆𝑑𝑆𝑆𝑑 𝑓𝑆𝑓𝑓 𝑑𝑡𝑑 𝑓𝑓𝑓𝑑𝑆𝑓𝑑𝑓𝑑𝑆𝑓 𝑆𝑑𝑟𝑆𝑑𝑟𝑑𝑓𝑑𝑆𝑑𝑟𝑓𝑓:
𝐼𝑓𝑑𝑆𝑓𝑑𝑓𝐼𝑑 ∶
use of the trigonometric identities

Euler parameters
( ), RON-basis,1 2 3=b b b b
,1 1 2 2 3 3n n n= + +n b b b
cos , sin , sin , sin
1 1 2 2 3 3
0 1 1 2 2 3 3
e e e
e e n e n e n2 2 2 2ϕ ϕ ϕ ϕ
= + +
= = = =
e b b b
3S
0e
3e4
{ }( , , , ) ,
4 2 2 2 20 1 2 3 0 1 2 3
3 4 2 2 2 20 1 2 3
e e e e e e e e e 1
S e e e e e 1
= ∈ + + + =
= ∈ + + + =
( )( ) 02 2e= + × × + ×R 1 e 1 e 1 e 1
100
1=n
𝑑𝑡𝑑𝑓 𝑤𝑑 𝑡𝑆𝑎𝑑
ℝ ℝ
ℝ
With a specific RON−basis
in which
Then we have the following relations:
The parameters are known as the Euler parameters. ( , , , )0 1 2 3e e e e e=
This constraint on the Euler parameters represents the unit sphere
1= ⇒n.n
cos , sin0e2 2ϕ ϕ
= =e n

3 2
0 3 1
2 1
0 e e2e e 0 e
e e 0
− − = −
[ ]( )3 2 3 2
3 1 3 1
2 1 2 1
1 0 0 0 e e 0 e ee 0 1 0 2 e 0 e e 0 e
0 0 1 e e 0 e e 0
− − = + − − + − −
bR
( ) ( , ) ( ) , ( , )2 30 0 0e e 2 2e e e S= = = + × + × = ∈R R R e 1 e 1 e 1 e
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
2 20 1 1 2 0 3 1 3 0 2
2 21 2 0 3 0 2 2 3 0 1
2 21 3 0 2 2 3 0 1 0 3
2 e e 1 2 e e e e 2 e e e e2 e e e e 2 e e 1 2 e e e e2 e e e e 2 e e e e 2 e e 1
+ − − +
+ + − − − + + −
How to calculate matrix elements from Euler parameters
101
( ), RON-basis,1 2 3=b b b b
To indicate the Euler parameters associated with a rotation we write

[ ] o
11 12 13
21 22 23
31 32 33
R R RR R RR R R
=
eR
How to calculate Euler parameters from matrix elements
, , ,
2 11 22 330
2 ii ii 11 22 33i
R R R 1tr 1e4 4
R 1 2R R R Rtr 1e i 1 2 32 4 4
+ + ++ = = + − − −− = − = =
R
R
There is a 2 -1 correspondence between Euler parameters and rotation matrices!
No singularity! (In contrast to the Euler angles)
102

( , , , ) ( , , , )2 2 2 20 1 2 3 0 1 2 3e e e e 1 e e e e 0 0 0 0+ + + = ⇒ ≠
,32 231
0
R Re4e−
=
11 22 330
R R R 1e 04
+ + += ± ≠
,13 312
0
R Re4e−
= 21 123
0
R Re4e−
=
How to calculate Euler parameters from matrix elements, condinued
103

,1 2 21 124e e R R= +
11 22 330
R R R 1e 04
+ + += ± =
,1 3 31 134e e R R= + 2 3 32 234e e R R= +
,21 122
1
R Re4e+
=
, 11 22 330 1
1 R R Re 0 e 04
+ − −= = ± ≠
31 133
1
R Re4e+
=
How to calculate Euler parameters from matrix elements
104

, , 22 11 330 1 2
1 R R Re 0 e 0 e 04
+ − −= = = ± ≠
31 133
2
R Re4e+
=
How to calculate Euler parameters from matrix elements
105
, , , 33 11 220 1 2 3
1 R R Re 0 e 0 e 0 e 04
+ − −= = = = ± ≠
Special cases:

Chapter 4.3.4 The composition of rotations
Let 1R and 2R be two rotations. The composition of 1R and 2R is given by 2 1=R R R and this represents another rotation. We have the following Proposition 4.1 If ,( , )1 1 0 1 1e=R R e , ,( , )2 2 0 2 2e=R R e and 2 1=R R R then ( , )0e=R R e where , ,0 0 1 0 2 1 2e e e= − ⋅e e , , ,2 0 1 1 0 2 1 2e e= + + ×e e e e e (4.18)
Corollary 4.1 Two rotations commute if and only if their rotation axes are parallel, i.e. 2 1 1 2 1 2= ⇔R R R R e eP
106

Chapter 4.3.5 The exponential map
exp( ) : ..., ( )! !
2 31 1 End2 3
= + + + + ∈A 1 A A A A V
... exp( ) exp( )! !
2 32 3
2 3ϕ ϕϕ ϕ ϕ= + + + + = = ×R 1 N N N N n 1
( )Skew= × ∈N n 1 V
( )SOϕ ∈R n: V
107
The exponential map:
Rotation Skew-sym. Tensor Expanding in Maclaurin series:

Chapter 4.4 Time-dependent transplacement, Motion –velocitiy and acceleration
( )
( , ) ( ) ( )( ) ( ) ( )( ), A
P P A A P A A P At
t t t t t t 0=
= = + + − = + − ≥p
p r r u R r r p R r r
χ
108
𝑆𝑟𝑟𝑟𝑑 𝑑𝑆𝑆𝑓𝑟𝑟𝑓𝑆𝐼𝑑𝑓𝑑𝑓𝑑
The rigid motion is a set of rigid transplacements parameterized by time t

Rigid body velocity
, P A AP P= + × ∈v v ω p
( )Tax=ω RR
T=W RRSpin tensor:
Angular velocity: (axial vector of )
Rigid body velocity field: 109
anti-symmetric tensor, since:
( )T T T T T= = = − = −W RR RR RR W
T T T T T= ⇒ + = ⇒ = −RR 1 RR RR 0 RR RR
W

110
Rigid body rotation
( )T= ⇔ = = × = ×W RR R WR ω 1 R ω R
( ) (exp( ( ) ))( )
t
00 0
t s ds0
= ×⇔ = = ×
=∫
R ω RR R ω 1 R
R R
Thus, if the angular velocity is known and the rotation tensor is known at time then the rotation tensor : is known.
( )t=ω ωt 0= ( )t=R R

( ), P A AP AP P= + × + × × ∈a a α p ω ω p
α
ω
Pg
tB A g
APp
Aa
β
g AP×α p
( )AP× ×ω ω p
Rigid body acceleration
111
Tangential acceleration
Centripetal acceleration
It is more difficult to graphically illustrate the acceleration field than the velocity field. We look at the special case when the body rotates around an axis with fixed direction
, , = = =ω n α n n 0 ω ω
sinAP AP AP d× = × = =α p n p p ω ω β ω
( ) sin2 2AP AP AP dβ ω× × = × = =ω ω p ω ω p ω p
The tangential and normal parts of the relative acceleration:

01e
02e
03e
1e
2e3e
ω R
4.4.2 Euler-Poisson velocity formula for moving bases
, , 0 0 01 1 2 2 3 3= = =e Re e Re e Re
( )1 2 3=e e e e( )0 0 0 01 2 3=e e e e
[ ] [ ]0
=e e
R R
112
Starting from a fixed RON-base In the reference placement
RON-basis following the rotation of the rigid body

01e
02e
03e
1e
2e3e
ω R
Euler-Poisson velocity formula for moving bases
113

Euler-Poisson velocity formula for moving vectors and tensors
,( ) ( ) ( ) ( )
3
j iji j 1
t t t A t=
= = ⊗∑ iA A e e
( ) rel= × − × +A ω A A ω 1 A
rel= × +a ω a a
( )3
reli
i 1a
•
=
= =∑ iea e a( ) ( ) ( )
3
ii 1
t t a t=
= = ∑ ia a e
( ),
( ) ( ) ( )3
relj ij
i j 1t t A t
•
=
= ⊗ =∑ ieA e e A
114

Angular acceleration
3rel
ii 1=
= = ∑ iω ω e ω
rel rel= × + =ω ω ω ω ω
3
ii 1
ω=
= ∑ iω e
1e
2e3e
ω
115
rel= × +a ω a a moving vector

Angular velocity and Euler angles
116

Combining rotations The addition of angular velocities, version 1
( )T1 1 1ax=ω R R
( )1 1 t=R R
2 2 1= +ω ω R ω
( )2 2 t=R R
2 1=R R R
( )T2 2 2ax=ω R R ( )Tax=ω RR
117 Addition rule 1 – not used that often
consider two rotation tensors
the combined rotation tensor
We introduce the angular velocities

Combining rotations The addition of angular velocities, version 2
1R
2R
1f
2f 3f
1g
2g
3g
0feω
0geω
gfω
01e
02e
03e
(( ) )T2 2ax=gf fω R R
1 0=f R e 2=g R f
( )0
T11 1ax= =feω ω R R
( )0
Tax= =geω ω RR
0=g Re 2 1=R R R
118

Combining rotations The addition of angular velocities, version 2
1R
2R
1f
2f 3f
1g
2g
3g
0feω
0geω
gfω
01e
02e
03e
0 0= +ge gf feω ω ω
119
Addition rule 2

120

121

122
( )0
T11 1ax= =feω ω R R
[ ]( ) ( ) ,oo o
3 3ψ ψ= =e
f R e e R
[ ]cos sin
( ) sin coso3
00
0 0 1
ψ ψψ ψ ψ
− =
eR
Euler angles, first rotation
By use of Lemma 4.1

123
Euler angles,second rotation
[ ]( ) ( ) ,1 1θ θ= =f
g R f f R
[ ]( ) cos sinsin cos
1
1 0 000
θ θ θθ θ
= −
fR

124
Euler angles, third rotation
[ ]( ) ( ) ,3 3φ φ= =g
e R g g R
[ ]cos sin
( ) sin cos3
00
0 0 1
φ φφ φ φ
− =
gR

125

Given a rotation tensor ( , , )ψ θ φ=R R where , ,ψ θ φ are Euler angles. Calculate the matrices [ ]( , , ) 015 35 60° ° °
eR and ( , , ) 0
0115 35 60 ° ° ° e
R e .
Exercise 1:12
132

Exercise 1:12
The rotation matrix expressed in Euler angles:
R ψ θ, φ, ( )
cos ψ( )
sin ψ( )
0
sin ψ( )−
cos ψ( )
0
0
0
1
1
0
0
0
cos θ( )
sin θ( )
0
sin θ( )−
cos θ( )
⋅
cos φ( )
sin φ( )
0
sin φ( )−
cos φ( )
0
0
0
1
⋅:=
Conversion from degrees to radians:
Rd ψ θ, φ, ( ) R ψπ
180⋅ θ
π
180⋅, φ
π
180⋅,
:=
Calculation of the rotation matrix:
Rd 15 35, 60, ( )
0.299
0.815
0.497
0.943−
0.171
0.287
0.148
0.554−
0.819
=
Checking the rotation matrix:
Rd 15 35, 60, ( ) 1=Rd 15 35, 60, ( ) Rd 15 35, 60, ( )T⋅
1
0
0
0
1
0
0
0
1
=
Calculating the rotation of the first basis vector:
Rd 15 35, 60, ( )
1
0
0
⋅
0.299
0.815
0.497
=
133

134
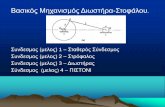
Exercise 1:14
The mechanism to control the deployment of a spacecraft solar panel from position A to position B is to be designed. Determine the transplacement, i.e. the translation vector and rotation tensor R , which can achieve the required change of placement. The side facing the positive x-direction in position A must face the positive z-direction in position B. Calculate the rotation vector ϕn corresponding to the rotation. (Meriam & Kraige 7/1).

135
Exercise 1:14
01e
02e
03e
1e
2e
3e
n
ϕ