Multi-Phase Optimal Partitions - Beni Bogoşel's blog Optimal Partitions Functions of Bounded...
72
Multi-Phase Optimal Partitions Functions of Bounded Variation Candidate: Beniamin Bogo¸ sel Supervisors: Prof. Dorin Bucur Prof. ´ Edouard Oudet Chamb´ ery 2012
Transcript of Multi-Phase Optimal Partitions - Beni Bogoşel's blog Optimal Partitions Functions of Bounded...

Multi-Phase Optimal Partitions
Functions of Bounded Variation
Candidate: Beniamin Bogosel
Supervisors:Prof. Dorin Bucur
Prof. Edouard Oudet
Chambery 2012


Contents
1 Introduction 4
2 Existence results via Trace Inequalities 102.1 Two Fluids Partition . . . . . . . . . . . . . . . . . . . . . . . 142.2 The Case of Three Fluids . . . . . . . . . . . . . . . . . . . . 20
3 Γ-convergence approach to Existence 263.1 Modica-Mortola Theorem . . . . . . . . . . . . . . . . . . . . 263.2 Baldo’s Result . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4 Numerical Results 584.1 Isoperimetric problem . . . . . . . . . . . . . . . . . . . . . . 584.2 Anisotropic problem . . . . . . . . . . . . . . . . . . . . . . . 614.3 Optimal Partitions . . . . . . . . . . . . . . . . . . . . . . . . 65
5 Conclusions 68


1 Introduction
This document presents a mathematical approach to study the equilibriumconfigurations of immiscible fluids. The mathematical model of the energy ofa configuration of immiscible fluids goes back to Massari [20] and takes intoaccount all the important factors which exist in the physical configuration:the interfacial tension, the contact with the container and the gravitationalpotential energy.
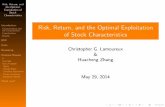
The interfacial tension between two immiscible fluids comes as a conse-quence of the different structure of the molecules of the two fluids and the lackof attraction between molecules of different kinds. One way to explain theinterfacial tension is that molecules in the bulk of the fluid are surrounded inall sides by similar molecules, and even though the attraction force betweenmolecules of the same kind is large, the fact that these attraction forces pullequally in every direction gives some kind of equilibrium. On the other hand,molecules situated at the boundary of the fluid have only half of the neigh-bors that a bulk molecule has, and as a consequence the boundary moleculesare pulled inwards into the liquid. Since the fluid doesn’t shrink indefinitelydue to this inward attraction of boundary molecules, it follows that there isanother force which balances this inward attraction force, and this force actson the boundary of the fluid. This is the interfacial tension. The interfacialtension is measured in force per unit length, so it does not depend on thesize of the interface of the fluids.
Figure 1: Molecule attractions
Another explanation for the existence ofthe interfacial tension is that when we wantto increase the boundary surface betweentwo immiscible fluids we consume energy,since we replace the strong bounds of themolecules of one of the fluids with weakbounds of molecules between different flu-ids, and we get nothing in return. Thismeans that there is a force which resiststhe increase of the surface of the boundary,and that is the interfacial tension.
Although the interfacial tension is an in-termolecular force, some of its effects can be seen on a macroscopic scale:water strider can walk on water, some needles and coins can float, etc.
One of the properties of the surface tension of three immiscible fluidsE1, E2, E3 is that
σ12 + σ23 > σ13
4

(a) Water Strider (b) Floating Coin
Figure 2: Surface tension effects a
aImage sources: fcps.edu, gutterremedy.com
where σij represents the interfacial tension between fluids Ei and Ej. Forproofs and justifications of this inequality see [11] and [24]. The idea is thata triangle with sides σ12, σ23 and σ13 can be formed due to the connectionof the sizes of σij with the angles formed at the interface of three fluids (seeFigure 3). This hypothesis on the values of the surface tensions is essentialin the proof of the existence of the optimal configuration.
αβγ
E1
E2
E3
(a) Angles at the interface
σ12
σ23
σ13
π − β
π − α
π − γ
(b) Newmann triangle
Figure 3: Connection between σij and angles
The contact with the walls of the container is almost negligible for largecontainers. In fact there exists a particular length κ−1 =
√γ/ρg which is
referred to as the capillary length and physical experiments show that forsizes of order smaller than κ−1 the gravity can be defeated by the capillaryeffects. This can be seen as liquids rise in thin tubes, but not in thick tubes.When the size of the configuration is larger than κ−1 then the gravitational
5

energy prevails. Still it can be observed that at a distance of κ−1 near thewall of the container or near a small floating object, the surface of the fluidis perturbed by the wall or by the floating object. For details see [12].
κ−1
(a) Wall effect
κ−1
(b) Floating object
Figure 4: Capillary Length
Still, if we denote by βi the interfacial tension of the fluid Ei with wallsof the container Ω the angle which the interface between fluids Ei, Ej makeswith the boundary of the container satisfies the relation
cosα =βi − βjσij
which readily implies the inequality |βi − βj| ≤ σij which is considered asa hypothesis in the existence theorem. The relation above shows that thishypothesis is not artificial. For the proof the reader may consult [24].
Figure 5: Anglerelation
Gravity has a great influence on the configurationof immiscible fluids. As can be seen in some picturestaken in space, in zero gravity water bulks takes theshape of balls, proving again that fluids left free tendto minimize their surface, whereas in the presence ofgravity only small drops of water have spherical form.Gravity makes the heavier fluids travel to the bottomof the container, while the easier fluids go towards theupper part of the container. Its effects are importantand cannot be neglected if we want to propose a realisticmodel.
Once the model has been proposed, we are inter-ested in two aspects of the study: the existence of theoptimal configuration, which minimizes the energy ofthe system, and the determination or approximation of
6

(a) Water in Space (b) Small water drop on Earth
Figure 6: Gravity Effect b
bImage sources: strangecosmos.com, doodoox.deviantart.com
the equilibrium configuration. For the existence results we use the classicalmethods of the calculus of variations, i.e. we prove that the functional isbounded from below, that any minimizing sequence contains a subsequencewhich is convergent and that the energy functional is lower semicontinuouswith respect to a good topology, facts which combined prove that a minimizerexists.
The only aspect of the ones presented above which presents some diffi-culties is the proof of the lower semicontinuity of the energy functional. Inthe case of two or three fluids the terms containing the surface tension arelower semicontinuous, and the gravity terms are continuous (we consider thecontainer to be bounded), so the terms which give rise to problems are theterms which model the contact with the walls of the container. To go beyondthis difficulty we have two approaches. The first one, adapted after the ideasof Massari [20], uses some trace inequalities for BV functions from the arti-cle of Anzellotti and Giaquinta [3], which bounds the wall contact energy interms of the relative perimeter and the volume of the fluid. The second one,adapted after the ideas of Baldo [4] uses the fact that the Γ-limit is alreadylower semicontinuous, so if we prove that our functional is the Γ-limit of asequence of well chosen functionals then we are done. One great advantageis that the Γ-convergence is stable under continuous perturbations, so thegravity term doesn’t pose any problems in our study.
This last approach gives also an approximation result for the equilibriumconfiguration by Γ-convergence and it works for an arbitrary finite number of
7

fluids, not only for two or three fluids. Numeric results using Γ-convergencehave been obtained for optimal partitions by E. Oudet [23]. In the last partwe will present some numerical approximations of the optimal configurationusing Γ-convergence.
This manuscript was written using LATEX. All of the figures which do notcontain references were created by me using one of the open source programsMetaPost, Asymptote or Xfig.
This study was made while I was in an Erasmus stage at the Laboratoirede Mathematique, Universite de Savoie, France.
8


2 Existence results via Trace Inequalities
In the following, we want to give a mathematical model for the energy inconfigurations of n different immiscible fluids situated in a container Ω, whichis thought as an open subset of RN , N ≥ 2. We consider fluids modeled bymeasurable sets E ⊂ Ω and since we are going to study functionals whichdeal with the surface tension energies we will need a good framework forstudying the perimeters of such sets. For this we consider the space BV (Ω)of functions with bounded variation on Ω. Some of the standard referencesfor this subject are the books of Evans, Gariepy [14] and E. Giusti [17]. Wewill state below some of the results we will be using in the sequel, whoseproofs can be found in the given references.
For any open subset Ω ⊂ RN , N ≥ 2 and for every u ∈ L1loc(Ω), we define
the total variation of u on Ω as∫Ω
|Du| = sup
∫Ω
u(x) div g(x)dx : g ∈ C∞0 (Ω;RN), |g| ≤ 1
If∫
Ω|u| < ∞ and
∫Ω|Du| < ∞ we write u ∈ BV (Ω) and say that u has
bounded variation in Ω. Note that the space W 1,1(Ω) is contained in BV (Ω)and for every u ∈ W 1,1(Ω) we have∫
Ω
|Du| =∫
Ω
|Du(x)|dx.
There are, however, functions in BV (Ω)\W 1,1(Ω) (for example characteristicfunctions of the smooth, open, bounded subsets of Ω).
One of the immediate properties of the total variation is that it is lowersemicontinuous with respect to the L1(Ω) topology, i.e. if (un) ⊂ L1(Ω) is asequence of functions which converges to u in L1(Ω) then∫
Ω
|Du| ≤ lim infn→∞
∫Ω
|Dun|.
We can define a norm on BV (Ω) in the following way:
‖u‖BV = ‖u‖L1 +
∫Ω
|Du|,
and under this norm BV (Ω) becomes a Banach space.A useful property of BV (Ω) is that for every c > 0 the sets
u ∈ BV (Ω) :
∫Ω
|u|dx+
∫Ω
|Du| ≤ c
10

are compact in the L1(Ω) topology provided that Ω is bounded and suffi-ciently regular such that the Rellich Theorem can be applied (for example Ωhas smooth boundary or Lipschitz-continuous boundary).
There is an approximation result of bounded variation functions by smoothfunctions, but the approximation cannot be expected to take place in the BVnorm, since then we know that BV (Ω) 6= W 1,1(Ω). Consider u ∈ BV (Ω).Then there exists a sequence (un) ⊂ C∞(Ω) such that
limn→∞
∫Ω
|un − u|dx = 0
and
limn→∞
∫Ω
|Dun|dx =
∫Ω
|Du|.
As a consequence we obtain that the setsu ∈ BV (Ω) :
∫Ω
u = m,
∫Ω
|Du| ≤ c
(2.1)
are compact in L1(Ω) for all constants m ∈ R, c ∈ R+.For a fixed open subset Ω of RN the map
A 7→∫A
|Du|
defined for any open subset A of Ω is the trace on the open sets of a uniquelydetermined Borel measure on Ω; we shall denote by
∫E|Du| the value of this
measure on a measurable subset E of Ω.We denote by HN−1 the N−1-dimensional Hausdorff measure and | · | the
Lebesgue measure on RN . If E is any measurable subset of RN we denote byχE the characteristic function of E and for every open subset Ω of RN we let
PerΩ(E) =
∫Ω
|χE|.
If PerΩ(E) <∞ we say that E has finite perimeter in Ω. It can be proved thatPΩ(E) ≤ HN−1(∂E ∩Ω) with equality if, for instance, ∂E ∩Ω is a Lipschitzcontinuous hypersurface. Here are a few properties of the perimeter:
• If Ω′ ⊂ Ω then PerΩ′(E) ≤ PerΩ(E) with equality if E ⊂⊂ Ω′.
• PerΩ(E1 ∪ E2) ≤ PerΩ(E1) + PerΩ(E2) with equality if d(E1, E2) > 0.
• |E| = 0 implies PerΩ(E) = 0 and |E1∆E2| = 0 implies PerΩ(E1) =PerΩ(E2).
11

If Ω is an open subset of RN and u ∈ BV (RN) then the function
t 7→ PΩ(x ∈ R : u(x) > t)
is Lebesgue measurable on R and the Fleming-Rishel coarea formula (see[16]) holds: ∫
Ω
|Du| =∫ ∞−∞
PΩ(x ∈ RN : u(x) > t)dt.
For every set S with finite perimeter it is possible to construct a subset∂∗S ⊂ ∂S called the reduced boundary of S, such that
PΩ(S) = HN−1(∂∗S ∩ Ω).
One important property of BV (Ω) is that when the boundary is suffi-ciently regular there is a well defined trace of a bounded variation functionon the boundary which agrees with the definition for W 1,1(Ω) functions. As-sume Ω is open, bounded and has Lipschitz boundary. Then there exists abounded linear mapping
T : BV (Ω)→ L1(∂Ω;HN−1)
such that ∫Ω
f divϕdx = −∫
Ω
ϕ · d|Df |+∫∂Ω
(ϕ · ν)TfdHN−1
for all f ∈ BV (Ω) and ϕ ∈ C1(RN ;RN).The function Tf , which is uniquely defined up to sets of HN−1 measure
zero, is called the trace of f on ∂Ω. We also have for HN−1 a.e. x ∈ ∂Ω
limr→0
1
|B(x, r) ∩ Ω|
∫B(x,r)∩Ω
|f(y)− Tf(x)|dy = 0,
which implies that
Tf(x) = limr→0
1
|B(x, r) ∩ Ω|
∫B(x,r)∩Ω
f(y)dy.
For more details see [14] Chapter 5.We now desire to give a formulation for the energy of a configuration of
n fluids, taking into account the interfacial tension between the fluids, thegravity and the contact with the walls of the container. Suppose the containerΩ is a bounded open subset of RN , usually with some regularity assumptionslike ∂Ω is Lipschitz continuous or C1. Consider the fluids modeled by the
12

measurable sets E1, ..., En ⊂ Ω such that E1 ∪ ... ∪ En = Ω and Ei ∩ Ej =∅,∀1 ≤ i < j ≤ n, equalities which hold up to a measurable set. EachEi has a prescribed volume ci > 0 and a given density ρi > 0 such thatc1 + ... + cn = |Ω|. We know the interfacial tensions σij > 0 at the interfacebetween Ei and Ej, and the wetting coefficient βi of Ei with the wall of thecontainer Ω. We also assume that the sets Ei have finite perimeter in Ω,which allows us to speak of their reduced boundary ∂∗Ei.
Now we are able to define a formula for the energy of the system
E(E1, ..., En) =n∑
i,j=1,i 6=j
σijHN−1(∂∗Ei∩∂∗Ej ∩Ω) +n∑i=1
βiHN−1(∂∗Ei∩∂Ω)+
+n∑i=1
gρi
∫Ω
xNχEidx
where the last term is the gravitational potential energy.Our goal is to prove that under certain conditions on σij, βi and the
regularity of ∂Ω the problem
minE∈KE(E)
has a solution in K, where E = (E1, ..., En) and
K = (Ei)ni=1 :n⋃i=1
Ei = Ω, |Ei| = ci, Ei ∩ Ej = ∅
The equalities are considered modulo a set of measure zero, and c1 + ...+cn =|Ω|.
13

2.1 Two Fluids Partition
In the following sections we follow the article of Massari [20] regarding theformulation of the problem and the proof of the existence result. Althoughthe ideas are the same, the proof presented here is different from the onegiven in the referred article.
Suppose we have two fluids E1, E2, with the considerations above. Thenthe energy functional has the following form
E(E1, E2) = σ12H2(∂∗E1∩∂∗E2∩Ω)+2∑i=1
βiH2(∂∗Ei∩∂Ω)+2∑i=1
gρi
∫Ω
xNχEidx,
(2.2)but since χE1 + χE2 = 1 almost everywhere on Ω, we see that the positionof E2 is uniquely determined by the position of E1, so it is obvious that theproblem
min(E1,E2)∈K
E(E1, E2)
has a solution if and only if the problem
minE⊂Ω,|E|=c
F(E)
has a solution, where
F(E) = γ PerΩ(E) + βHN−1(∂∗E ∩ ∂Ω) + gρ
∫Ω
xNχEdx. (2.3)
This formulation can be proven to be equivalent to the initial one, byreplacing E2 = Ω\E1 in E(E1, E2). Notice that the termH2(∂∗E1∩∂∗E2∩Ω)is in fact equal to PerΩ(E1) = PerΩ(E2), since we have only two fluids, andthe measure interface between them, which is inside Ω, is equal to theirrelative perimeter with respect to Ω. Also, notice that H2(∂∗E1 ∩ ∂Ω) +H2(∂∗E2 ∩ ∂Ω) = Per(Ω). Then we have
E(E1, E2) = σ12 PerΩ(E1)+(β1−β2)H2(∂∗E1∩∂Ω)+g(ρ1−ρ2)
∫Ω
xNχE1dx+C
where C = β2 Per(Ω) + gρ2
∫ΩxNdx. Notice that this has the same form as
(2.3) with γ = σ12, β = β1 − β2 and ρ = ρ1 − ρ2 except for the constant C,which does not affect the existence of the minimizer.
There are a few simple conditions which are needed for the existence ofthe minimizer for (2.3). First note that the term βH2(∂∗E ∩ ∂Ω) is boundedby |β|Per(Ω) and the last term is bounded by |g|ρ
∫Ω
maxΩ|xN |dx. If we have
14

γ < 0 then F is not bounded from below, and the minimizer does not exist.Therefore, a necessary condition for the existence of a minimum is γ ≥ 0.This is a reasonable condition from a physical point of view, because it simplysays that σ12 ≥ 0, which is true. In fact σ12 > 0, or else the two fluids wouldmix, which is not the case here. Hence, in the following we will use thecondition γ > 0.
Therefore, if γ > 0 we know that F is bounded from below. SupposeEh is a minimizing sequence. Then F(Eh) is bounded above by a constantK > 0, and therefore
Per(Eh) ≤ 1
γ
(K + |β|Per(Ω) + |g|ρ
∫Ω
maxΩ|xN |dx
)(2.4)
Therefore Per(Eh) is bounded and since |Eh| = c, by the compactnessproperty (2.1) it follows that the sequence χEh has a convergent subsequencein the L1(Ω) topology. Since the perimeter is lower semicontinuous for theL1(Ω) topology, it follows that the limit point of the convergent subsequenceof (Eh) is also a set with finite perimeter. If we could prove that F is lowersemicontinuous with respect to the L1(Ω) topology, then the existence of aminimizer would be proved.
First note that if |β| > γ then the functional F is not lower semicontin-uous.
Example 1. Take Ω = (x, y, z) : x2 + y2 + z2 < 1 for z ≤ 0, x2 + y2 <1, z ∈ (0, 2) and x2 + y2 + (z − 2)2 < 1 for z ≥ 2 (a cylinder with twohalfspheres glued at its ends). Note that Ω has C1-boundary and the interiorsphere property: there exists ρ > 0 such that for any x ∈ Ω there exists a ballof radius ρ such that x ∈ Bρ ⊂ Ω.
Take S the open unit ball centered in origin, and denote Sε the translationof S with vector (0, 0, ε), where ε > 0.
Note that for ε < 1 we have Sε ⊂ Ω and Sε converges to S = S0 inL1(Ω) as ε → 0. First, let’s notice that for ε > 0 Sε ⊂ Ω and F(Sε) =γ PerΩ(Sε) + G(Sε), where G is the gravity term, and it is L1(Ω) continuous.
On the other hand F(S) =γ
2Per(S) +
β
2Per(S) + G(S), and therefore
limε→0
[F(S) − F(Sε)] =β − γ
2Per(S). This limit is strictly positive for β > γ
and it follows that F is not necessarily lower semicontinuous if β > γ.
Example 2. Consider the cube C = [−1, 1]3 and S the unit open ball. DefineΩ = C+ 1
10S = a+b : a ∈ C, b ∈ 1
10S. Then Ω is open and has C1 boundary
and the interior sphere property.
15

Figure 7: Examples 1 and 2
Let’s consider now sets E ⊂ Ω such that |E| = c ∈ (0, |Ω|) and E is thecomplement in Ω of a compact subset K ⊂ Ω. In particular, this means that∂Ω ⊂ ∂∗E, so the functional F has the following form
F(E) = γ PerΩ(E) + β Per(Ω) + G(E),
where G is the gravity term, and it is continuous. Consider sets of the formΩr = aC+rS such that |aC+rS| = c. The volume of aC+rS can explicitlybe calculated in terms of a, r, because aC + rS can be split in parts whichform a cube of side a, six boxes of size a× a× r, three cylinders with radiusr and height a and a ball of radius r,
|aC + rS| = a3 + 6a2r + 3πar2 +4πr3
3
note that for every r such that 4πr3/3 < c we can find a > 0 such that|aC + rS| = c. Denote a(r) the positive solution of this equation and notethat as 4πr3/3 → c we must have a(r) → 0. Therefore, the diameter of thefigure Ωr = |a(r)C + r(S)| in the direction of the axes Ox,Oy,Oz, whichis equal to 2r + a(r) tends to 2rmax which is the diameter of the sphere ofvolume c.
Pick c such that the sphere of volume c centered at the origin doesn’t fitinside Ω (pick the diameter of the sphere equal to 2 + 2/10 +ε where ε > 0 issmall enough. By the continuity of r 7→ 2r+a(r) we can deduce that there isan r0 such that 2r0 + a(r0) is equal to 2 + 2/10, and a(r0) 6= 0 since the ballof radius r0 centered at the origin does not fit in Ω. Moreover, by implicitdifferentiation, we see that 2r + a(r) is increasing. Consider now the limit
limr→r0,r<r0
F(Ω \ Ωr0)−F(Ω \ Ωr) =
= limr→r0
[γ PerΩ(Ωr0)− γ PerΩ(Ωr) + β(H2(∂Ω \ ∂Ωr0)− Per(Ω))+
16

+G(Ωr0)− G(Ωr)]
= (−γ − β)6a2(r0)
Notice now, that if β < −γ then −γ − β > 0 and the result of theabove limit is strictly positive. This proves that F is not necessarily lowersemicontinuous if β < −γ.
In the following, for a function u ∈ BV (Ω) we denote by u its trace on∂Ω.
Definition 2.1. Suppose Ω ⊂ RN is an open set with Lipshitz boundary andHN−1(Ω) <∞. For every x ∈ ∂Ω we define
q(x) = lim supρ→0
∫∂ΩχAdHN−1∫Ω|DχA|
: A ⊂ Ω ∩B(x, ρ), |A| > 0, PerΩ(A) <∞
and denote QΩ = supx∈∂Ω
q(x).
As noted in [3] if Ω has boundary of class C1 then QΩ = 1 and for opensets with Lipschitz boundary we have QΩ =
√1 + L2 where L is the Lipschitz
constant of ∂Ω. The following trace inequality is proved in [3].
Proposition 2.1. Suppose Ω ⊂ RN is a bounded open set with Lipschitzboundary and HN−1(∂Ω) <∞. Then for every ε > 0 there exists a constantc = c(Ω, ε) such that for every u ∈ BV (Ω) we have∫
∂Ω
|u|dHN−1 ≤ (QΩ + ε)
∫Ω
|Du|+ c(Ω, ε)
∫Ω
|u|dx.
With the aid of the above result we will prove an inequality which is ofgreat importance in the proofs of the theorems in this chapter.
Theorem 2.1. Suppose Ω ⊂ RN is an open set with Lipschitz boundary,ε, ρ > 0 and QΩ as in Definition 2.1. Define Ωρ = x ∈ Ω : d(x, ∂Ω) < ρ.Then for every ρ > 0 there exists a constant k such that for every u ∈ BV (Ω)we have ∫
∂Ω
|u|dHN−1 ≤ (QΩ + ε)
∫Ωρ
|Du|+ k
∫Ωρ
|u|dx. (2.5)
Proof: We will use Proposition 2.1 for the function v = (1− χρ)u whereχρ ∈ C1
0(Ω), 0 ≤ χρ ≤ 1, χρ(x) = 1 if d(x, ∂Ω) ≥ ρ and |Dχρ| ≤ 2/ρ.
17

We have∫∂Ω
|u|dHN−1 =
∫∂Ω
|v|dHN−1 ≤
≤ (Q+ ε)
∫Ω
|D(1− χδ)u|+ c(Ω, ε)
∫Ω
|(1− χδ)u|dx ≤
≤ (Q+ ε)
∫Ωρ
|Du|+(
2(Q+ ε)
ρ+ c(Ω, ε)
)∫Ωρ
|u|dx
and note that we can take k =2(Q+ ε)
ρ+ c(Ω, ε).
Italo Tamanini proves in [25] a similar inequality for open sets Ω withthe interior sphere condition, i.e. there exists some r > 0 such that for anyx ∈ Ω there exists a ball of radius r such that x ∈ Br ⊂ Ω. Equivalently,the curvature of ∂Ω is bounded from above. This inequality states that forevery set with finite perimeter E ⊂ Ω we have
HN−1(∂∗E ∩ ∂Ω) ≤ PerΩρ(E) + c|E ∩ Ωρ|,
where c is a constant which depends on ρ and Ω. This is a stronger inequalitythan (2.5), but its proof uses in an essential way the interior sphere propertyof Ω, and cannot be directly generalized to sets with Lipschitz boundary.This inequality is used in [20] in the proof of the existence result, but herewe will use the inequality (2.5), as the proof still works with this weakerinequality.
Theorem 2.2. Suppose Ω is a bounded open set with C1 boundary. If γ >0 and γ ≥ |β| then the functional F is lower semicontinuous for the L1
convergence of characteristic functions and therefore the problem (2.3) has asolution.
Proof: Let’s consider cases β = ±γ separately. If β = γ then the perime-ter and boundary terms give γ Per(E) which is lower semicontinuous. Ifβ = −γ then the perimeter and boundary terms differ by a constant ofγ Per(Ω \ E) which is also lower semicontinuous. Therefore these cases donot pose any problem, and from now on we suppose that γ > |β|.
Consider (Eh) a sequence of sets of finite perimeter such that Eh → Ein the L1(Ω) convergence. Consider ε, ρ > 0 small enough and note that forΩ considered in the hypothesis we have QΩ = 1. We denote with G(E) thegravity term associated to E and note that G is continuous with respect tothe L1(Ω) convergence. Denote F ′ = F − G. Then applying inequality (2.5)
18

we have
F ′(E)−F ′(Eh) = γ
(∫Ω
|DχE| −∫
Ω
|DχEh|)
+ β
∫∂Ω
(χE − χEh)dHN−1+
≤ γ
(∫Ω
|DχE| −∫
Ω
|DχEh |)
+ |β|∫∂Ω
|χE − χEh|dHN−1 ≤
≤ γ
(∫Ω
|DχE| −∫
Ω
|DχEh|)
+ |β|(1 + ε)
∫Ωρ
|DχE|+
+ |β|(1 + ε)
∫Ωρ
|DχhE|+ k|β|∫
Ω
|χE − χEh |dx =
= γ
(∫Ω\Ωρ|DχE| −
∫Ω\Ωρ|DχEh|
)+
+ (γ + |β|(1 + ε))
∫Ωρ
|DχE|+ (|β|(1 + ε)− γ)
∫Ωρ
|DχhE|+
+ k|β|∫
Ω
|χE − χEh|dx
By choosing ε small enough such that |β|(1+ε) < γ, using the fact that Gis continuous and the total variation is lower semicontinuous we obtain that
lim suph→∞
F(E)−F(Eh) ≤ (γ + |β|(1 + ε))
∫Ωρ
|DχE|.
Since ρ > 0 is arbitrary small, we can deduce that
lim suph→∞
F(E)−F(Eh) ≤ 0
which means that F is lower semicontinuous for the L1(Ω) convergence ofcharacteristic functions.
The boundedness condition (2.4) together with the compactness property(2.1) now lead to the existence of a minimizer for problem (2.3).
Since the fact that Ω has C1 boundary is a bit restricting (for examples,squares, rectangles, cubes and cylinders are not included in this class), wecan state another variant of the result for domains with Lipschitz continuousboundary. Note that for Ω with Lipschitz continuous boundary we haveQΩ =
√1 + L2 where L is the Lipschitz constant of ∂Ω. It is easy to see
that if we impose the stronger hypothesis γ >√
1 + L2β then the proof ofthe next result works exactly as the proof of the above theorem.
Theorem 2.3. Suppose Ω is a bounded open set with Lipschitz continuousboundary. If γ > 0 and γ >
√1 + L2|β| then the functional F is lower semi-
continuous for the L1 convergence of characteristic functions and thereforethe problem (2.3) has a solution.
19

2.2 The Case of Three Fluids
We consider now the case where we have three fluids in the container Ω.Then the energy functional has the form
E(E) =∑
1≤i<j≤3
σijHN−1(Σij) +3∑i=1
βiHN−1(∂∗Ei ∩ ∂Ω) +3∑i=1
gρi
∫Ω
xNχEidx
where Σij = ∂∗Ei ∩ ∂∗Ej ∩ ΩSince we have
HN−1(Σij) +HN−1(Σik) = PerΩ(Ei),
we can rewrite the energy functional in the following form
E(E) =3∑i=1
γi PerΩ(Ei)+3∑i=1
βiHN−1(∂∗Ei∩∂Ω)+3∑i=1
gρi
∫Ω
xNχEidx, (2.6)
where γi, i = 1..3 satisfy the relations γi + γj = σij for 1 ≤ i < j ≤ 3.Indeed, we can calculate that
γi =σij + σik − σkj
2,
and by the physical considerations on the interfacial tensions σij it is rea-sonable to assume that γi ≥ 0. In fact, the condition γi ≥ 0 is a necessarycondition for the existence of a lower bound for the functional E .
Remark 2.1. We cannot obtain a formulation similar to (2.6) for a numberof four or more fluids, because the system of equations
γi + γj = σij, 1 ≤ i < j ≤ n
is overdetermined, and has solution if and only if the following obvious con-dition holds on σij
σij + σkl = σik + σjl,
for all indexes 1 ≤ i, j, k, l ≤ n which are pairwise distinct. These conditionsare not physically justified. Take for example the values of the interfacialtensions (measured in dynes) given in the Smithsonian Physical Tables (see[1]) for air, water, olive oil and mercury.
Water Air Mercury Olive Oil
Water 0 75 392 18.6Air 75 0 513 34.6
Mercury 392 513 0 317Olive Oil 18.6 34.6 317 0
20

σAir-Water + σMercury-Oil = 392
σAir-Mercury + σWater-Oil = 531.6
The lower bound for the energy functional can be deduced from the gen-eral form of the energy if σij = γi + γj ≥ 0, because then we trivially have
E(E) ≥ −3∑i=1
(|βi|Per(Ω) + |g|ρi|Ω|max
Ω|xN |
).
Of course, the condition σij ≥ 0 is necessary, because otherwise, we can makethe boundary between Ei and Ej to be very rough, making HN−1(Σij)→∞and therefore E(E)→ −∞.
This means that one necessary condition for the existence of the minimumis σij ≥ 0 for all 1 ≤ i < j ≤ 3. If one σij is zero, then the fluid Ei canspread freely in Ej, because the cost of the boundary of Ei and Ej becomeszero. This contradicts the immiscibility of the fluids Ei and Ej. Therefore,regarding this fact, and the physical considerations, we will assume thatσij > 0 for all 1 ≤ i < j ≤ 3.
Let’s now turn to the compactness property. Denote 0 < σi = minj 6=i
σij.
Then we have the following inequality:
σi PerΩ(Ei) ≤∑j 6=i
σijHN−1(Σij) ≤ E(E)+3∑i=1
(|βi|Per(Ω) + |g|ρi|Ω|max
Ω|xN |
).
If we choose (Eh) a minimizing sequence for E , then E(Eh) is bounded, andby the inequality above it follows that PerΩ(Eh
i ) is bounded. Since thishappens for every i = 1..3 and |Eh
i | = ci, i = 1..3, by the compactnessproperty (2.1) and a diagonal argument it follows that (Eh) has a convergentsubsequence in (L1(Ω))3 topology to some element (E) = (E1, E2, E3) suchthat PerΩ(Ei) <∞, i = 1..3.
To be able to prove the lower semicontinuity of the functional E in the(L1(Ω))3 topology, in the case when Ω has smooth boundary, we have thenecessary condition |βi − βj| ≤ σij = γi + γj, a condition which is similarwith the condition we had in the case of two fluids. If these conditions donot hold, we have the following counterexample.
Example 3. In this example we suppose that β1 > β2 + σ12 and we willsee that the functional E is not lower semicontinuous. This example can beextended to more dimensions, or to multiple fluids to see that the condition|βi − βi| ≤ σij is really necessary for the lower semicontinuity of the energy
21

functional. The main idea is that if β1 > β2 + σ12 if we replace the contactregion of E1 with the container by a thin layer of E2 then we get a strictlylower energy value.
Consider the unit square [0, 1]2 and define E3 = [0, 1] × [0, 1/2] (thisis the fixed position of E3). Consider E1 = [0, 1/2] × [1/2, 1] and E2 =[1/2, 1]× [1/2, 1] (see the figure).
Eh1
Eh2
E3
1
h
Figure 8: Example 3
Define Eh1 = [0, 1/2]× [1/2, 1− 1/h], Eh
2 = [0, 1]2 \ (E3 ∪ Eh1 ) (we take a
thin strip of E1 and pass it to E2). Notice that all terms concerning E3 areconstant, so we just look at the terms containing E1, E2, E
h1 , E
h2 .
limh→∞
[σ12HN−1(Ω∩∂Eh1 ∩∂Eh
2 )+β1HN−1(∂Ω∩∂Eh1 )+β2HN−1(∂Ω∩∂Eh
2 )] =
= σ12 + β1/2 + 3β2/2.
On the other hand
σ12HN−1(Ω ∩ ∂E1 ∩ ∂E2) + β1HN−1(∂Ω ∩ ∂E1) + β2HN−1(∂Ω ∩ ∂E2) =
= σ12/2 + β1 + β2,
which proves that
lim suph→∞
E(E)− E(Eh) =β1 − β2 − σ12
2> 0
and E is not lower semicontinuous.We are now ready to state the main result of this section.
22

Theorem 2.4. Consider Ω ⊂ RN an open set with C1 boundary. If γi >0, γi + γj > 0 and γi + γj > |βi − βj| for every 1 ≤ i, j ≤ 3 with i 6= j thenthe functional
E(E) =3∑i=1
γi PerΩ(Ei) +3∑i=1
βiHN−1(∂∗Ei ∩ ∂Ω) +3∑i=1
gρi
∫Ω
xNχEidx
is lower semicontinuous with respect to (L1(Ω))3 convergence of characteristicfunctions.
Proof: First let’s notice that the gravity term is continuous, and thisreduces the problem to proving that
S(E) =3∑i=1
γi PerΩ(Ei) +3∑i=1
βiHN−1(∂∗Ei ∩ ∂Ω)
is lower semicontinuous.Pick E ⊂ K and consider (Eh) ⊂ K such that Eh → E in the sense
of L1(Ω) convergence of characteristic functions. Without loss of generalitywe can assume that β1 ≤ β2 ≤ β3. We notice that χE1 + χE2 + χE3 =χEh1 +χEh2 +χEh3 = 1 almost everywhere in Ω. Therefore, we can replace χE2
and χEh2 in terms of E1, E3, Eh1 , E
h3 in the trace term from the expression of
S(E). We also take ε, ρ > 0 sufficiently small and use the trace inequality(2.1). Therefore we have
S(E)− S(Eh) =3∑i=1
[γi
(∫Ω
|DχEi| −∫
Ω
|DχEhi |)
+
+ βi
∫∂Ω
(χEi − χEhi )dHN−1
]≤
≤3∑i=1
γi
(∫Ω\Ωρ|DχEi | −
∫Ω\Ωρ|DχEhi |
)+
3∑i=1
γi
∫Ωρ
|DχEi |+
+∑j=1,3
(1 + ε)|βj − β2|∫
Ωρ
|DχEj |+
+∑j=1,3
((1 + ε)|βj − β2| − γj)∫
Ωρ
|DχEhj | − γ2
∫Ωρ
|DχEh2 |+
+ k∑j=1,3
|βj − β2|∫
Ωρ
|χEi − χEhi |dx
23

Denote
G(Eh) =∑j=1,3
((1 + ε)|βj − β2| − γj)∫
Ωρ
|DχEhj | − γ2
∫Ωρ
|DχEh2 |.
If we prove that lim suph→0
G(Eh) ≤ 0 then we are done, since
lim suph→0
F(E)−F(Eh) ≤3∑i=1
γi
∫Ωρ
|DχEi |+∑j=1,3
|βj − β2|∫
Ωρ
|DχEj |,
and the right hand side term tends to zero as ρ → 0. So let’s prove thatlim suph→0
G(Eh) ≤ 0. If γi ≥ (1 + ε)|βj − β2|, j = 1, 3 then we are done. If
γ1 < (1 + ε)|β1 − β2|, we obtain
G(Eh) ≤ ((1 + ε)|β1 − β2| − γ1)
(∫Ωρ
|DχEh2 |+∫
Ωρ
|DχEh3 |
)+
+ ((1 + ε)(β3 − β2)− γ3)
∫Ωρ
|DχEh3 | − γ2
∫Ωρ
|DχEh2 | =
= ((1 + ε)(β2 − β1)− γ1 − γ2)
∫Ωρ
|DχEh2 |+
+ ((1 + ε)(β3 − β1)− γ1 − γ3)
∫Ωρ
|DχEh3 | ≤ 0
for ε > 0 chosen small enough.If γ3 < (1 + ε)|β3− β2| then a similar inequality takes place. It is easy to
see that if both γ1 < (1 + ε)|β1 − β2| and If γ3 < (1 + ε)|β3 − β2| hold thenwe contradict the hypothesis for ε > 0 small enough.
Therefore the functional S is lower semicontinuous, and the theorem isproved.
As in the case of two fluids, we can formulate a similar result for Ω withLipschitz boundary by strengthening the inequalities between γi and βi suchthat the trace inequality for Lipschitz continuous domains can be applied.
Theorem 2.5. Consider Ω ⊂ RN an open set with Lipschitz continuousboundary. If γi > 0, γi + γj > 0 and γi + γj >
√1 + L2|βi − βj| for every
1 ≤ i, j ≤ 3 with i 6= j (L is the Lipschitz constant of ∂Ω) then the functional
E(E) =3∑i=1
γi PerΩ(Ei) +3∑i=1
βiHN−1(∂∗Ei ∩ ∂Ω) +3∑i=1
gρi
∫Ω
xNχEidx
24

is lower semicontinuous with respect to (L1(Ω))3 convergence of characteristicfunctions.
We will see in the next section that the lower semicontinuity of the func-tionals presented in this sections work for domains Ω with Lipschitz continu-ous boundary with the same conditions as for the C1 boundary, but the toolsused in proving the lower semicontinuity are completely different.
25

3 Γ-convergence approach to Existence
3.1 Modica-Mortola Theorem
The notion of Γ-convergence was introduced by E. De Giorgi and T. Franzioniin [13]. For an introduction in the subject see the books [7], [6], by AndreaBraides and the free document [8] by the same author.
Definition 3.1. Let X be a metric space, and for ε > 0 let be given Fε :X → [0,∞]. We say that Fε Γ-converges to F on X as ε→ 0, and we write
Γ− limFε = F or FεΓ−→ F , if the following conditions hold:
(LI) For every u ∈ X and every sequence (uε) such that uε → u in X wehave
lim infε→0
Fε(uε) ≥ F (u)
(LS) For every u ∈ X there exists a sequence (uε) such that uε → u in Xand
lim supε→0
Fε(uε) ≤ F (u).
We use the indexing by ε > 0 since often the families of approximatingfunctionals Fε depend on the values of ε > 0, and the convergence as ε→ 0 ofuε to u (for example) is interpreted as the convergence of uεn to u as n→∞and εn → 0.
In practice, the (LI) property is often easy to verify, but the property(LS) rises more problems, because the sequence uε must be constructed forevery u. It is often convenient to find a set D ⊂ X, which satisfies thefollowing conditions for every u ∈ X there is an approximating sequence(un) ⊂ D such that un → u and F (un) → F (u); then a simple diagonalargument shows that is enough to verify (LS) only for elements u ∈ D. Wecan push this argument a bit further, and just verify that for every u ∈ Dand every η > 0 there is a sequence (uε) ⊂ X such that lim sup d(ε, u) ≤ ηand lim supFε(uε) ≤ F (u) + η.
Some of the main properties of the Γ-convergence are presented in thefollowing proposition.
Proposition 3.1. The Γ-convergence has the following properties:
(i) The Γ-limit F is always lower semicontinuous on X;
(ii) Γ-convergence is stable under continuous perturbations: if FεΓ−→ F
and G is continuous, then
Fε +GΓ−→ F +G
26

(iii) If FεΓ−→ F and vε minimizes Fε over X, then every limit point of (vε)
minimizes F over X.
Consider a container which is filled with two immiscible and incompress-ible fluids. In the classical theory of phase transition is assumed that, atequilibrium, the two fluids arrange themselves in order to minimize the areaof their interface which separates the two phases (here we neglect the gravityand the interaction of the fluids with the wall of the container). This situa-tion is modeled as follows: the contained is represented by a bounded regulardomain Ω ⊂ RN (N = 3 is the physical case), and every configuration of thesystem is described by a function u on Ω which takes the value 0 on the setoccupied by the first fluid and the value 1 on the set occupied by the secondfluid. The set of discontinuities of u is the interface between the two fluids,and we denote it by Su. The set of admissible configurations is given by allu : Ω → 0, 1 which satisfy
∫Ωu = c where c is the volume of the second
fluid, c ∈ (0, |Ω|). Ignoring the gravity and the contact with the walls, wecan assume that the energy of the system has the form F (u) = σHN−1(Su)where σ is the interfacial tension between the two fluids and HN−1 is theN − 1 dimensional Hausdorff measure. Therefore F (u) is a surface energydistributed on the interface Su, and the equilibrium configuration is obtainedby minimizing F over the space of admissible configurations.
A different way of studying systems of two immiscible fluids is to assumethat the transition is not given by a separating interface, but is rather acontinuous phenomenon occurring in a thin layer which we identify with theinterface. This means that we allow a fine mixture of the two fluids. In thiscase a configuration of the system is represented by a function u : Ω→ [0, 1]where u(x) represents the average volume density of the second fluid at thepoint x ∈ Ω. (u(x) = 0 means that only the first fluid is present at x,u(x) = 1/2 means that both fluids are present near x with the same rate,u(x) = 1 means that only the second fluid is present at x, etc.) The spaceof admissible configurations is the class X of all u : Ω → [0, 1] such that∫
Ωu = c, and to every configuration u we associate the energy
Eε(u) =
∫Ω
[ε2|Du|2 +W (u)
]dx
where ε is a small parameter and W is a continuous positive function whichvanishes only at 0 and 1 (a double-well potential). If we want to minimizeEε the term
∫W (u) favors configurations which take only values close to 0
and 1, while the term ε2∫
Ω|Du|2 penalizes the size of the transition layer
between the states 0 and 1. When ε is small the first term is also small, andthe minimum of Eε will, roughly, take only the values 0 and 1 (it must take
27

both because of the constraint∫
Ωu = c) and the transition only occurs in
a thin layer of order ε. This model was proposed by J.W. Cahn and J.E.Hilliard in [18].
A connection between the classical model and the Cahn-Hilliard modelwas established by L. Modica (in [21]), who proved that minimizers of Eεconverge to minimizers of F . This was obtained by proving that suitablerescalings of the functionals Eε Γ-converge to F . Note that for the mathe-matical model it is not essential that the phases of the liquid are 0 and 1.We may just as well take any two real values α < β for the phases, considerφ : R→ R, φ(x) = α + (β − α)x, and define
u1 = φ u, W1 = W φ−1.
The only modification in the formula of Eε is a constant factor which comesfrom Du1 and which can be embedded in ε. Therefore, without loss ofgenerality we can assume any real values we want for the phases α, β, andthe result remains the same.
The proof of Modica-Mortola’s theorem presented here follows the lines ofthe proof presented by G. Buttazzo in [10]. In the proofs we use a couple oflemmas from the articles of Modica [21],[22], whose proofs are quite technicaland are omitted here. Consider W : R → [0,∞) with only two zeros at −1and 1. Also define
C0 = 2
∫ 1
−1
√W (s)ds.
Consider Ω ⊂ RN a bounded open set with Lipschitz boundary. Define forevery u ∈ L1(Ω)
Fε(u) =1
εEε(u) =
∫Ω
[ε|Du|2 + 1
εW (u)
]dx u ∈ H1(Ω),
∫Ωu = c
∞ otherwise
and
F (u) =
C0 PerΩ(E) u ∈ BV (Ω; −1, 1), E = u−1(1),
∫Ωu = c
∞ otherwise
Theorem 3.1. (Modica – Mortola) Under the above considerations wehave
FεΓ−→ F in L1(Ω).
Proof: It is convenient to introduce the function
φ(t) =
∫ t
0
√W (s)ds
28

and note that C0 = 2(φ(1)− φ(−1)). It is easy to obtain from the definitionof the total variation that if
v ∈ BV (Ω; a, b), v(x) =
a x ∈ Eb x ∈ Ω \ E
then PerΩ(E) <∞ and ∫Ω
|Dv| = |a− b|PerΩ(E).
Therefore, for u ∈ BV (Ω; −1, 1) we can write
2
∫Ω
|D(φ u)| = 2(φ(1)− φ(−1)) PerΩ(u−1(1)) = F (u).
We are now ready to prove the (LI) property from the Γ-convergencedefinition. Take u ∈ L1(Ω) and (un) ⊂ L1(Ω), uε → u in L1(Ω). It isnot restrictive to assume that Fε(uε) and lim infε→0 Fε(uε) are finite, becauseotherwise the inequality is trivial to prove. The L1(Ω) convergence of (uε)to u implies the existence of a subsequence (uεn) which converges almosteverywhere to u as εn → 0 on Ω. By Fatou’s Lemma and the continuity ofW we have∫
Ω
W (u(x))dx ≤ lim infεn→0
∫Ω
W (uεn(x))dx ≤ lim infεn→0
εnFεn(uεn) = 0,
which implies W (u(x)) = 0 almost everywhere on Ω, and therefore |u| = 1almost everywhere on Ω. This leads us to
lim infε→0
Fε(uε) ≥ lim infε→0
∫Ω
2|Duε|√W (uε)dx =
= lim infε→0
∫Ω
2|D(φ uε)| ≥ 2
∫Ω
|D(φ u)|
where we have used the inequality a2 +b2 ≥ 2ab and the lower semicontinuityof the total variation. This proves the (LI) property.
We now turn to the (LS) property. The case when F (u) = ∞ is trivial,therefore we may assume that F (u) < ∞, and we want to find a densesubset D ⊂ BV (Ω; −1, 1) such that for every u ∈ BV (Ω; −1, 1) thereis an approximating sequence u ∈ D such that F (un) → F (u). One suchsubset may be found by looking at Lemma 1 from the article of Morica [22]which is stated bellow.
29

Lemma 1. Let Ω be an open, bounded subset of RN with Lipschitz continuousboundary, and let E be a measurable subset of Ω. If E and Ω\E both containa non-empty open ball, then there exists a sequence (Eh) of open bounded setsof RN with smooth boundaries such that
(i) limh→∞|(Eh ∩ Ω)∆E| = 0, lim
h→∞PerΩ(Eh) = PerΩ(E);
(ii) |Eh ∩ Ω| = |E| for h large enough;
(iii) HN−1(∂Eh ∩ ∂Ω) = 0 for h large enough.
In our case u has the form −χA + χΩ\A, where A is a subset of Ω withfinite perimeter. Using the above lemma we could define
D = −χA+χΩ\A : A ⊂ Ω, A open with smooth boundary,HN−1(∂A∩∂Ω) = 0,
if we knew that every bounded perimeter set E ⊂ Ω has the property that Eand Ω \ E both contain a non-empty open ball. This is not true in general,but Theorem 1.24 from [17] says that any finite perimeter set E can beapproximated by sets with smooth boundary (Eh) such that
limh→∞
∫Ω
|χEh − χE| = 0 and limh→∞
PerΩ(Eh) = PerΩ(E).
This reduces the problem to proving (LS) for all u ∈ D.In the following we need another lemma from the same paper [22].
Lemma 2. Let A be an open set of RN with smooth, non-empty, compactboundary and Ω an open subset of RN such that HN−1(∂A∩∂Ω) = 0. Defineh : RN → R by
h(x) =
−d(x, ∂A) x ∈ Ad(x, ∂A) x /∈ A
.
Then h is Lipschitz continuous, |Dh(x)| = 1 for almost all x ∈ RN andif St = x ∈ RN : h(x) = t then
limt→0HN−1(St ∩ Ω) = HN−1(∂A ∩ Ω).
Take u = −χA∩Ω + χΩ\A such that∫
Ωu = c, where A is an open set
with smooth boundary such that HN−1(∂A ∩ ∂Ω) = 0. We do assume thatA ∩ Ω 6= ∅. Set for every t ∈ R
30

∂A
uε = −1
uε = 1
d(x) = −ηε
d(x) = ψε(1)− ηε
Ω
Figure 9: Construction of uε
ψε(t) =
∫ t
−1
ε√ε+W (s)
ds
ϕε(t) =
−1 t ≤ 0
ψ−1ε (t) 0 ≤ t ≤ ψε(1)
1 t ≥ ψε(1)
and defineuε(x) = ϕε(d(x) + ηε)
where
d(x) =
−d(x, ∂A) x ∈ Ad(x, ∂A) x /∈ A
and ηε is chosen such that ∫Ω
uε =
∫Ω
u.
Note that this is possible, since
ϕε(d(x)) ≤ u(x) ≤ ϕε(d(x) + ψε(1)).
The last inequality proves that we can choose 0 ≤ ηε ≤ ψε(1).Note that for d(x) ≤ −ηε or d(x) ≥ ψε(1)− ηε we have uε(x) = u(x) and
31

therefore, using the coarea formula we get∫Ω
|uε(x)− u(x)|dx =
∫−ηε≤d(x)≤ψε(1)−ηε
|ϕε(d(x) + ηε)− u(x)||∇d(x)|dx ≤
≤∫ ψε(1)−ηε
−ηε(|ϕε(t+ ηε)|+ 1)HN−1(x ∈ Ω : d(x) = t)dt ≤
≤ 2ψε(1)σψε(1) ≤ 4√εσ2√ε
whereσa = sup
−a≤t≤aHN−1(x ∈ Ω : d(x) = a).
Notice that by Lemma 2 we have σa → HN−1(∂A∩Ω) as a→ 0 and thereforeuε → u in L1(Ω).
Denote Σε = x ∈ Ω : −ηε < d(x) < ψε(1) − ηε and notice that if ε issmall enough then |∇d(x)| = 1 for all x ∈ Σε. Using the coarea formula weget
Fε(uε) =
∫Ω
[ε|ϕ′ε(d(x) + ηε)|2 +
1
εW (ϕε(d(x) + ηε))
]dx =
=
∫Σε
[ε|ϕ′ε(d(x) + ηε)|2 +
1
εW (ϕε(d(x) + ηε))
]dx =
=
∫ ψε(1)−ηε
−ηε
[ε|ϕ′ε(t+ ηε)|2 +
1
εW (ϕε(t+ ηε))
]HN−1(d(x) = t)dt ≤
≤ σψε(1)
∫ ψε(1)
0
[ε|ϕ′ε(t)|2 +
1
εW (ϕε(t))
]dt
By the definitions of ψε, ϕε we have
ϕ′ε =1
ψ′ε(ψ−1ε )
=
√ε+W (ψ−1
ε )
ε=
1
ε
√ε+W (ϕε).
Using this and the previous relations we obtain
Fε(uε) ≤ σψε(1)
∫ ψε(1)
0
[ε+W (ϕε(t))
ε+
1
εW (ϕε(t))
]dt ≤
≤2σψε(1)
ε
∫ ψε(1)
0
[ε+W (ϕε(t))]dt =
= 2σψε(1)
∫ 1
−1
√ε+W (s)ds
32

where in the last equality we have changed the variable s = ϕε(t). Takingnow lim sup as ε→ 0 in the inequality obtained and using Lemma 2 we get
lim supε→0
Fε(uε) ≤ C0 PerΩ(A) = F (u).
This proves (LS) and finishes the proof.
33

3.2 Baldo’s Result
A particular consequence of the Modica-Mortola Theorem is that the func-tional
F(E1, E2) = σ PerΩ(∂∗E1 ∩ ∂∗E2)
is lower semicontinuous with respect to the L1(Ω) convergence for σ > 0 onthe set
K = (E1, E2) : E1 ∪ E2 = Ω, E1 ∩ E2 = ∅, |Ei| = ci > 0
where the equalities are, as usual, up to a set of measure zero. It wouldbe nice if a similar result would be true for multi-phase systems, where afunctional of the form
F(E1, E2, ..., Ek) =∑
1≤i<j≤k
σij PerΩ(∂∗Ei ∩ ∂∗Ej)
is a Γ-limit and therefore semicontinuous, for E = (Ei) ∈ K where
K = (E1, ..., Ek) :k⋃i=1
Ei = Ω, Ei ∩ Ej = ∅, for i 6= j, |Ei| = ci > 0.
Let’s first remark that allowing the function W in the Modica-Mortolatheorem to have more than two zeros does not suffice. Indeed, if we allow Wto have zeros α < β < γ, then the limiting phase will take only two valuesα and β or β and γ, depending on the constraint
∫Ωu = c. This means that
functionals of the form we presented above cannot be represented as a Γ-limitwhen the function W is scalar, but with more than two zeros. This obstaclecan be overcome by passing to the multidimensional case. This approach ispresented by Sisto Baldo in [4] and we will present the ideas of this approachbelow.
Consider Ω ⊂ Rn, N ≥ 2 be an open bounded set with Lipschitz contin-uous boundary. Take u = (u1, ..., un) ∈ L1(Ω;Rn) such that ui ≥ 0 for everyi = 1..n with the constraint ∫
Ω
u(x)dx = m
where m = (m1, ...,mn) ∈ Rn+ is given. We also take a function W : Rn
+ →[0,∞), with exactly k zeros α1, ..., αk ∈ Rn
+. (Rn+ = (x1, ..., xn) ∈ Rn : xi ≥
0, i = 1..n) We assume that m satisfies the condition
minαi1, ..., αik ≤mi
|Ω|≤ maxαi1, ..., αik, i = 1..n
34

We make a technical assumption on W : there exist 0 ≤ K1 < K2 ∈ Rsuch that
W (u) ≥ supW (v) : v ∈ [K1, K2]n for every u /∈ [K1, K2]n. (3.1)
We will need another condition on W which will allow us to correct thevolume when constructing an approximating sequence in the proof of the (LS)property. For this one of the two conditions mentioned below will suffice:
(a) W is bounded from above.
(b) W converges superlinear to zero near all of the αi, i = 1..k, i.e. for alli = 1..k there exists a small ball Bi centered at αi and some numberspi > 1, S > 0 such that
W (x) ≤ S|x− αi|pi on Bi.
Also define the following metric on Rn+:
d(ξ1, ξ2) = inf∫ 1
0
√W (γ(t))|γ′(t)|dt : γ ∈ C1([0, 1];Rn
+), γ(0) = ξ1, γ(1) = ξ2.
It is easy to see that d(ξ1, ξ2) does not depend on the parametrization of thepath γ; this is a simple consequence of the change of variables property.
Remark 3.1. The definition of the metric above is equivalent to
d(ξ1, ξ2) = inf∫ 1
0
√W (γ(t))|γ′(t)|dt : γ ∈ L([0, 1];Rn
+), γ(0) = ξ1, γ(1) = ξ2,
where we have denoted by L([0, 1],Rn+) the space of paths which are Lipschitz
continuous. The restriction of the definition to C1 paths is good for the proofof the theorem from the article of Baldo [4], but the space of C1 functionsdoes not have sufficiently strong compactness properties we will need in thefinal of this section. A sequence of C1 paths which converges uniformly, doesnot necessarily have a C1 limit, but a sequence of Lipschitz continuous paths,for which the Lipschitz constants are bounded from above, if it convergesuniformly to a path, then this path is also Lipschitz continuous.
Note that a continuous path γ is ’nice’ enough, in the sense that it hasa well defined length if it is rectifiable, i.e. it has bounded variation. Re-stricting ourselves to the class of Lipschitz path, not only do we get a welldefined length for our path, but we also know that the path is almost every-where differentiable, and the fundamental formula of calculus works. Fur-thermore, Lipschitz continuous paths, as well as C1 paths have an arclength
35

parametrization, which allows us to parametrize them with constant speed on[0, 1]. For more details see [19] Chapter 4.
To see that the two definitions of the metric are equivalent, it is enoughto pick a Lipschitz continuous path γ and show that
F (γ) =
∫ 1
0
√W (γ(t))|γ′(t)|dt
can be approximated as well as we want by F (λ) where λ is a C1 path. Forthis note that γ′ ∈ L∞([0, 1],Rn
+) ⊂ L1([0, 1],Rn+) so we can approximate γ′
in the L1 norm by a continuous function σ such that ‖σ − γ′‖1 < ε. Defineλ : [0, 1] → Rn
+ by λ(t) = γ(0) +∫ t
0σ(t)dt. From here we deduce right away
that λ is C1 and for every t ∈ [0, 1] we have
|γ(t)− λ(t)| ≤∣∣∣∣γ(t)− γ(0)−
∫ t
0
γ′(t)dt
∣∣∣∣+
∣∣∣∣∫ t
0
γ′(t)dt−∫ t
0
σ(t)dt
∣∣∣∣ < ε.
Using the above estimates and the fact that the paths close to the infimummust be contained in a compact set as a consequence of 3.1, it follows thatthe two definitions are equivalent. In view of this fact, we will use in eachcase the definition which suits best our needs.
Using the above metric we can define for i = 1..k the following functions:
ϕi : Rn+ → [0,∞), ϕi(ξ) = d(ξ, αi).
The following proposition states a couple of properties of the metric d.
Proposition 3.2. The function ϕi is locally Lipschitz continuous. Moreover,if u ∈ H1(Ω) ∩ L∞(Ω), then ϕi u ∈ W 1,1(Ω) and the following inequalityholds: ∫
Ω
|D(ϕi u)(x)|dx ≤∫
Ω
√W (u(x))|Du(x)|dx.
Proof: First, it is easy to see that because d is a metric we have for everya, b ∈ [K1, K2]h and for every i = 1..k
|ϕi(a)− ϕi(b)| = |D(a, αi)− d(b, αi)| ≤ d(a, b)
Now let’s estimate d(a, b).
Suppose K ⊂ R is a compact, and define K to be the convex hull of Kwhich is also a compact and C = supx∈KW (x). Since
d(a, b) = inf∫ 1
0
√W (γ(t))|γ′(t)|dt : γ ∈ C1([0, 1];Rn
+), γ(0) = a, γ(1) = b,
36

by picking, for example γ(t) = (1− t)a+ tb we get that
d(a, b) ≤∫ 1
0
√W (γ(t))|a− b|dt ≤ C|a− b|.
This proves that ϕi is locally Lipschitz-continuous for all i = 1..k.If the inequality∫
Ω′|D(ϕi u)| ≤
∫Ω′
√W (u(x))|Du(x)|dx
holds for every open set Ω′ ⊂ Ω then the proposition is proved by using themonotone convergence theorem.
Consider the case u ∈ C1(Ω). The function ϕi u is locally Lipschitz-continuous, and therefore differentiable almost everywhere in Ω. Take x adifferentiability point of ϕi u, (xh) be a sequence converging to x ∈ Ω andσh be the segment σh(t) = (1 − t)x + txh. By the definition of the metric dwe have
|ϕi u(x)− ϕi u(xh)| ≤ d(u(x), u(xh)) ≤
≤∫ 1
0
√W (u(σh(t))|D(u(σh(t))||xh−x|dt =
√W (u(σh(th))|D(u(σh(th))||xh−x|,
where in the last equality we have applied the mean value theorem andth ∈ [0, 1], i.e. σh(th) ∈ [x, xh]. ([s, t] denotes the segment between s and tfor every s, t ∈ Rn) Divide the inequality obtained by |x − xh| and take thelimit as h→∞ to get
|D(ϕi(u(x))| ≤√W (u(x))|Du(x)|.
Take u ∈ H1(Ω) ∩ L∞(Ω), and let (uh) ⊂ C1(Ω) be a sequence such thatuh → u in H1(Ω). By passing, eventually, to subsequences we can assumethat uh(x) → u(x) and Duh(x) → Du(x) almost everywhere in Ω. Takeg ∈ C1
0(Ω′,Rn), |g| ≤ 1 in Ω′. Then we have∫Ω′
(ϕi u) div gdx = limh→∞
∫Ω′
(ϕi uh) div gdx ≤
≤ limh→∞
∫Ω′|D(ϕi uh)|dx ≤
≤ lim suph→∞
∫Ω′
√W (uh(x))|Duh(x)|dx ≤
≤∫
Ω′
√W (u(x))|Du(x)|dx,
37

where we have used the dominated convergence theorem, the inequality ob-tained for C1(Ω) functions and Fatou’s Lemma. This finishes the proof ofthe proposition.
Given two regular positive Borel measures µ and ν on Ω, we define thesupremum µ∨ ν as the smallest regular positive measure which is greater orequal to µ and ν on all Borel subsets of Ω. We have
(µ∨ν)(A) = supµ(A′)+ν(A′′) : A′, A′′ open sets in Ω, A′∩A′′ = ∅, A′∪A′′ ⊂ Ω.
In the same way we can define recursively the supremum of more than twomeasures defined on Ω.
Consider a function u : Ω → Rn such that W (u(x)) = 0 almost every-where and ϕi u ∈ BV (Ω). This implies that
u(x) =k∑i=1
αiχSi(x),
where S1, ..., Sk are pairwise disjoint subsets of Ω such that |Ω\(S1∪..∪Sk)| =0. The next proposition proves that the supremum of some well chosenmeasures on Ω is the expression we are looking for.
Proposition 3.3. Denote µi the Borel measure µi : E 7→∫E
|D(ϕi u)|.
Then PerΩ(Si) <∞ for every i = 1..k and(k∨i=1
µi
)(Ω) =
1
2
k∑i,j=1
d(αi, αj)HN−1(∂∗Si ∩ ∂∗Sj ∩ Ω).
Proof: First, let’s prove that the sets Si have finite perimeter. We applythe coarea-type Fleming-Rishel formula.∫
Ω
|D(ϕi u)| =∫ ∞−∞
PerΩ(x ∈ Ω : ϕi(u(x)) ≤ t)dt ≥
≥∫ di
0
PerΩ(x ∈ Ω : ϕi(u(x)) ≤ t)dt = di PerΩ(Si)
where di = minj 6=i d(αi, αj) > 0. This implies that PerΩ(Si) <∞ for i = 1..k.We present now a lemma which will help us prove the proposition.
Lemma 3. Let µ be a regular Borel measure on Ω and B1, ..., Bm be disjointBorel subsets of Ω with finite µ-measure and chi , i = 1..m, h = 1..k be positivecoefficients. Define
µh(A) =m∑i=1
chi µ(A ∩Bi) ν(A) =m∑i=1
maxh
chi µ(A ∩Bi).
38

Then ν =k∨i=1
µh.
The proof of the lemma is quite simple. It suffices to notice that µh ≤ νfor every h = 1..k, and for each open set S ⊂ Bi, for some i = 1..m we have
maxh
µh(S) = ν(S).
Let’s now return to the proof of the proposition. Pick Ω′ an open subsetof Ω. Then for every i, j = 1..k, i 6= j we have
PerΩ′(Si ∪ Sj) = HN−1(∂∗Si∆∂∗Sj ∩ Ω′)
and we also have
∂∗Si =k⋃i=1i 6=j
(∂∗Si ∩ ∂∗Sj) ∪N
where HN−1(N) = 0. A simple inductive argument on the cardinality ofJ ⊂ 1, .., k proves that
PerΩ′(⋃j∈J
Sj) =∑j∈J
k∑i=1i/∈J
HN−1(∂∗Si ∩ ∂∗Sj ∩ Ω′)
Pick i = 1 and suppose for simplicity that
0 = ϕ1(α1) ≤ ϕ1(α2) ≤ ... ≤ ϕ1(αk).
By the Fleming-Rishel coarea formula and the above result we obtain∫Ω′|D(ϕ1 u)| =
∫ ϕ1(αk)
0
PerΩ′(x ∈ Ω′ : ϕ1(u(x)) ≤ t)dt
=k−1∑j=1
[ϕ1(αj+1)− ϕ1(αj)] PerΩ′
(j⋃l=1
Sl
)
=k−1∑j=1
j∑l=1
k∑m=j+1
[ϕ1(αj+1)− ϕ1(αj)]HN−1(∂∗Sl ∩ ∂∗Sm ∩ Ω′)
=k−1∑l=1
k∑m=l+1
m−1∑j=l
[ϕ1(αj+1)− ϕ1(αj)]HN−1(∂∗Sl ∩ ∂∗Sm ∩ Ω′) =
=k−1∑l=1
k∑m=l+1
[ϕ1(αm)− ϕ1(αl)]HN−1(∂∗Sl ∩ ∂∗Sm ∩ Ω′)
39

The last part of the above equalities was obtained by changing the orderof summation. Notice that the coefficient of HN−1(∂∗Sl∩∂∗Sm∩Ω′) dependsonly on ϕ1(αm) − ϕ1(αl) and because of the supposed ordering it is equalto |ϕ1(αm) − ϕ1(αl)|. The same result can be obtained for every i = 1..k.Therefore for every i = 1..k we have the following equality
2
∫Ω′|D(ϕi u)| =
k∑j,h=1
HN−1(∂∗Sj ∩ ∂∗Sh ∩ Ω′)|ϕi(αh)− ϕi(αj)|.
Note that for every i = 1..k, because of the definition of ϕi we have
|ϕi(αh)− ϕi(αj)| ≤ d(αh, αj)
for every h, j = 1..k with equality if and only if i = h or i = j. Now we canapply the above lemma for cij,h = |ϕi(αh)− ϕi(αj)| and
µi(Ω′) =
1
2
k∑j,h=1
cij,hHN−1(∂∗Sj ∩ ∂∗Sh ∩ Ω′).
Because maxicij,h = d(αj, αh), from the lemma we find that
(k∨i=1
µi
)(Ω′) =
1
2
k∑i,j=1
d(αi, αj)HN−1(∂∗Si ∩ ∂∗Sj ∩ Ω′),
from which the desired result follows if we take Ω′ = Ω. Using the result of the previous proposition we define for every u ∈ L1(Ω)
F0(u) =
2
k∨i=1
∫Ω
|D(ϕi u)| ϕi u ∈ BV (Ω), W (u(x)) = 0 a.e.,∫Ω
u(x)dx = m
∞ otherwise
and notice that when F0(u) <∞ we have u(x) =∑k
i=1 αiχSi with S1, .., Sk ⊂Ω, |Ω \ (S1 ∪ ... ∪ Sk)| = 0, PerΩ(Si) <∞ and
F0(u) =k∑
i,j=1
d(αi, αj)HN−1(∂∗Si ∩ ∂∗Sj ∩ Ω)
40

Define, also, for every ε > 0 and for any u ∈ L1(Ω)
Fε(u) =
∫
Ω
[ε|Du|2 +
1
εW (u)
]dx u ∈ H1(Ω;Rn
+),
∫Ω
u(x)dx = m
∞ otherwise
Now we are able to state the main result of this section.
Theorem 3.2. (Baldo) Under the above considerations we have
FεΓ−→ F0 in L1(Ω;Rn).
Proof: As in every Γ-convergence proof, we split the proof in two parts:the proof of (LI) and the proof of (LS). We first approach the proof of (LI),which is immediate, due to Propositions 3.2 and 3.3.
Pick u ∈ L1(Ω;Rn) and a sequence (uh) ⊂ L1(Ω;Rn) such that uh → uin L1(Ω;Rn). Take a sequence εh → 0. It is not restrictive to assume thatlimh→∞
Fεh(uh) exists and is finite. We can choose a subsequence uhk that
converges to u pointwise almost everywhere in Ω, and by Fatou’s lemma wehave ∫
Ω
W (u)dx ≤ lim infk→∞
∫Ω
W (uhk)dx ≤ lim infεhk→0
εhkFεhk (uhk) = 0.
Since W is continuous and non-negative it follows that W (u(x)) = 0 almosteverywhere in Ω. Now we need to prove that
2k∨i=1
∫Ω
|D(ϕi u)| ≤ limh→∞
∫Ω
[εh|Duh|2 +
1
εhW (uh)
]dx. (3.2)
Using the assumption (3.1) on W we can further reduce the problem tothe case uh is equibounded, i.e. replace each scalar component of uh with itstruncation with respect to K1 and K2. To simplify the notations, we denotethe truncated sequence (uh) like the initial sequence. Since W (u(x)) = 0almost everywhere in Ω we see that u takes, up to a set of measure zero,only the values α1, ..., αk which all are in [K1, K2]h. This means that thetruncation does not affect the L1(Ω;Rn) convergence of (uh) to u. Note alsothat by truncation the value of the integrals in the right hand side of (3.2)decrease, so we are going to prove a stronger inequality. Since ϕi is locallyLipschitz-continuous it follows that (ϕi uh) → (ϕi u) in L1(Ω) for everyi = 1..k. By the lower semicontinuity of the total variation we have for everyi = 1..k
|D(ϕi u)|(A) ≤ lim infh→∞
|D(ϕi uh)|(A)
41

for every open set A ⊂ Ω. In the following formulas the supremums are takenover all families (Ai) of pairwise disjoint open subsets of Ω.
k∨i=1
|D(ϕi u)|(Ω) = sup
k∑i=1
|D(ϕi u)|(Ai)
≤ sup
k∑i=1
lim infh→∞
|D(ϕi uh)|(Ai)
≤ sup
lim infh→∞
k∑i=1
|D(ϕi uh)|(Ai)
≤ lim infh→∞
(sup
k∑i=1
|D(ϕi uh)|(Ai)
)=
= lim infh→∞
k∨i=1
|D(ϕi uh)|(Ω)
Using the result of Proposition 3.2 we get
lim infh→∞
k∨i=1
|D(ϕi uh)|(Ω) ≤ lim infh→∞
∫Ω
√W (uh)|Duh(x)|dx ≤
≤ 1
2lim infh→∞
∫Ω
[εh|Duh|2 +
1
εhW (uh)
]dx
Combining the above results we obtain
F0(u) ≤ lim infh→∞
Fεh(uh),
and the proof of (LI) is complete.Let’s now turn to the proof of the (LS) property. Pick u ∈ L1(Ω;Rn). If
F0(u) =∞ then any sequence which converges to u in L1(Ω;Rn) will satisfy(LS). Therefore, without loss of generality we can assume that
u(x) =k∑i=1
αiχSi ,
where S1, .., Sk are pairwise disjoint sets with finite perimeter in Ω such that|Ω \ (S1 ∪ ... ∪ Sk)| = 0.
The following lemma, whose proof can be found in the article of Baldo[4], allows us to consider only partitions with the property that S1, ..., Sk arepolygonal domains in RN with HN−1(∂Si ∩ ∂Ω) = 0.
42

Lemma 4. Let S1, ..., Sk be a partition of Ω like in the expression of u.Then there exists a sequence Sh1 , ..., Shk of partitions of Ω such that
(i) Shi is a polygonal domain and HN−1(∂Shi ∩ ∂Ω) = 0 for any i = 1..kand for all h ∈ N;
(ii) If uh(x) =k∑i=1
αiχShi (x) then uh → u in L1(Ω;Rn) as h→∞;
(iii)
∫Ω
un(x)dx =
∫Ω
u(x)dx = m for all h ∈ N;
(iv) limh→∞
k∨i=1
∫Ω
|D(ϕi uh)| =k∨i=1
∫Ω
|D(ϕi u)|.
We need another lemma which generalizes an idea of Modica [21]. Weassume for simplicity that for every i, j = 1..k, i 6= j there exists a distanceminimizing geodesic connecting αi and αj, i.e. we suppose that there existsa C1-path γij such that γij(0) = αi, γij(1) = αj and
d(αi, αj) =
∫ 1
0
√W (γij(t))|γ′ij(t)|dt.
We will see in the end of the proof how to modify the proof if such geodesicsdo not exist. Also note that since the value of d(αi, αj) is independent of theparametrization of the path γij([0, 1]), we can assume that |γ′ij(t)| 6= 0 forevery t ∈ (0, 1).
Lemma 5. Consider the following family of differential equations:
(yijε )′ =
√δ +W (γij(y
ijε ))
ε|γ′ij(yijε )|2
(3.3)
for i, j = 1..k, i 6= j, ε > 0 and δ > 0 fixed.Then, for every ε > 0 there exists a Lipschitz continuous function χε :
Rk−1 → Rn and three constants C1, C2 and C3 depending only on δ such that:
(i) χε(t1, .., tk−1) =
α1 t1 < 0
αi t1 > C1ε, .., ti−1 > C1ε, ti < 0, for i = 2..k − 1
αk t1 > C1ε, .., tk−1 > C1ε
(ii) |χε| < C2, |Dχε| < C3/ε almost everywhere in Rk−1.
43

(iii) If j > i then on the set
t ∈ Rk−1 : 0 < ti < C1ε, tj < 0, th > C1ε for any h 6= i, j
χε depends only on ti and we can write
χε(ti) = γij(yijε )),
for any ti such that χε(ti) 6= αi, where yijε solves (3.3).
Proof of the lemma 5: We only need to find the constants C1, C2 and C3
and to define χε at the points different from those considered in (i). Define
ψε(t) =
∫ t
0
ε|γ′ij(s)|√δ +W (γij(s))
ds, t ∈ [0, 1],
and note that ψε is increasing. If we denote ηε = ψε(1), we immediatelyobtain ηε ≤ εδ−1/2length(γij). The inverse function yε : [0, ηε] → [0, 1] of ψεsatisfies the differential equation (3.3). We extend this function to the wholeR by putting
yijε (t) =
0 t ≤ 0
yε 0 ≤ t ≤ ηε
1 t ≥ ηε
Therefore yijε is a Lipschitz continuous function satisfying (3.3) in everypoint where yijε 6= 0, 1. Putting
C1 = maxi,j=1..k
δ−1/2length(γij)
we can define χε as required on the strips considered in (iii). We choose
C2 > sup
|x| : x ∈
k⋃i,j=1
γij([0, 1])
and
K = supi,j=1..k
i 6=j, t∈[0,1]
[√δ +W (γij(t))
|γ′ij(t)|
]
Then |χε| < C2 and |Dχε| ≤ K/ε on the subsets of Rk−1 described in (i)and (iii). Using an extension result for Lipschitz continuous functions (forexample Kirszbraun’s theorem, see [15]) we can extend χε to the whole Rk−1
and the extension has the same Lipschitz constant. Moreover, Rademacher’s
44

theorem says that a Lipschitz map is almost everywhere differentiable, andits differential (at the points where it exists) is bounded by the best Lipshitzconstant for our function. Therefore we can choose C3 = K. This ends theproof of the lemma.
We state here another Lemma following an idea of [21] which is used inour proof:
Lemma 6. Let A a polygonal domain RN and Ω an open subset of RN suchthat HN−1(∂A ∩ ∂Ω) = 0. Define h : RN → R by
h(x) =
−d(x, ∂A) x ∈ Ad(x, ∂A) x /∈ A
.
Then h is Lipschitz continuous, |Dh(x)| = 1 for almost all x ∈ RN andif St = x ∈ RN : h(x) = t then
limt→0HN−1(St ∩ Ω) = HN−1(∂A ∩ Ω).
We will now prove the (LS) property for domains with properties given inLemma 4. Note that for sets having the properties mentioned in the lemmawe can apply the results of Lemma 6. We define for i ∈ 1, .., k
hi(x) =
d(x, ∂Si) x /∈ Si−d(x, ∂Si) x ∈ Si
We fix δ > 0 and note that for ε small enough we have |Dhi(x)| = 1almost everywhere on the set x ∈ Ω : |hi(x)| < C1ε, for all i = 1..k.Consider the sequence of functions
uε(x) = χε(h1(x), .., hk−1(x)).
We denote Σti = x ∈ Ωhi(x) = t, t > 0, i = 1..k − 1 and using the coarea
45

formula we obtain∫Ω
|uε − u|dx ≤k−1∑i=1
∫x∈Ω:0<hi(x)<C1ε
|uε − u|dx ≤
≤ 2C2
k−1∑i=1
|x ∈ Ω : 0 < hi(x) < C1ε| =
= 2C2
k−1∑i=1
∫x∈Ω:0<hi(x)<C1ε
|Dhi(x)|dx =
= 2C2
k−1∑i=1
∫ C1ε
0
HN−1(Σti)dt ≤
≤ 2C1C2ε
k−1∑i=1
σiε
where σiε = supt∈[0,C1ε]
HN−1(Σti) and because of Lemma 6 we have
σiε → HN−1(∂Si ∩ Ω) <∞, i = 1..k − 1.
This means that uε → u in L1(Ω;Rn). If
∫Ω
uε = m then define uε = uε.
Otherwise denote
ηε =
∫Ω
uε(x)dx−∫
Ω
u(x)dx,
and find that |ηε| ≤ kε, where k > 0 is a constant.We denote
Fε(u,Ω′) =
∫Ω′
[ε|Du|2 +
1
εW (u)
]dx
We will now define uε such that∫
Ωuε = m, and uε equals uε in all of Ω
except a small set, such that the values of uε on that small set will not affectthe behavior of uε as ε → 0. We will give two variants for the definition ofuε, using the hypotheses (a) or (b) on W .
Remark 3.2. In the original article of Baldo [4] the hypotheses presentedbelow are not present, and the proof presented in the article contains an errorin this part where we build the recovery sequence and correct its integral. Thesame error is present in the article [21] of Modica. Hypothesis (a) is a quickfix, which is quite restrictive for W (no polynomial functions are allowed)even though, bu truncating W very far from its zeros by a constant functionshould not modify the Γ-convergence result.
46

Hypothesis (b) was suggested by Sisto Baldo in a short email discussion Ihad with him about the absence of some necessary additional hypothesis forhis proof to work.
Hypothesis (a) W is bounded from above by Q > 0.In this case we pick an open ball Bε = B(x0, ε
α) such that x0 is an interiorpoint for Ω∩S1 (if this set is void, we relabel Si such that S1 has the desiredproperty). For ε small enough we have Bε ⊂ x ∈ Ω : u(x) = α1. Thereforewe may define uε as follows:
uε(x) =
u(x) x ∈ Ω \Bε
α1 + hε(1− ε−α|x− x0|) x ∈ Bε
where hε is chosen such that∫Bε
hε(1− ε−α|x− x0|)dx = −ηε.
We have∫Bε
(1− ε−α|x− x0|)dx = |Bε| − ε−α∫Bε
|x− x0|dx =ωNε
Nα
N + 1,
where ωN is the volume of the N -dimensional unit ball. Therefore we define
hε = − N + 1
εNαωNηε,
and note that|hε| ≤ Kε1−Nα.
We evaluate
lim supε→0
Fε(uε, Bε) ≤ lim supε→0
(ε|hε|2ε−2α|Bε|+
1
ε|Bε|Q
)and note that for α ∈
(1N, 3N+2
)the limit in the right hand side is zero.
Therefore we may pick α in the prescribed interval, which is non-void forN ≥ 2, and we are done.
Hypothesis (b) W converges superlinear to zero near all of the αi, i =1..k, i.e. for all i = 1..k there exists a small ball Bi centered at αi and somenumbers pi > 1, S > 0 such that
W (x) ≤ S|x− αi|pi on Bi.
47

We pick an open ball Bε = B(x0, k) where x0 is an interior point of S1∩Ω,and k is small enough and fixed such that B ⊂ B1 ∩ S1. Note that for ksmall enough we have B ⊂ x ∈ Ω : u(x) = α1. We define uε as follows:
uε(x) =
u(x) x ∈ Ω \Bα1 + hε(k − |x− x0|) x ∈ B
where hε = −ηε(N + 1)ω−1n k−N−1 is chosen such that
∫Ωu(x)dx = m. It is
easy to see that |hε| ≤ K ′|ηε| ≤ Kε, where K,K ′ are positive constants. Itis still true that uε → u in L1(Ω;Rn). It remains to calculate:
lim supε→0
Fε(uε, B) = lim supε→0
[ε|hε|2|B|+
1
ε
∫B
W (α1 + hε(k − |x− x0|))dx]
≤ limε→0
1
εS|B|kp1|hε|p1 = 0
because p1 > 1.
This new function uε satisfies the constraint
∫Ω
uε = m for ε small enough.
To be able to give a good estimate for lim supε→0
Fε(uε) we consider the following
partition of Ω:
Bε
Ωε1 = S1 \Bε
Ωεi = x ∈ Si : hj(x) > Cjε, j = 1, .., i− 1 hi(x) < 0 for i = 2, .., k
Ωεij =
x ∈ Ω : 0 < hi(x) < C1ε, hj(x) < 0, hl(x) > C1ε,
∀l ∈ 1, .., k − 1 \ i, j, for i, j ∈ 1, .., k and i 6= j
Ωε0 = Ω \
(Bε ∪
k⋃i=1
Ωεi ∪
k⋃i,j=1i 6=j
Ωεij
)
We obviously have
lim supε→0
Fε(uε) ≤k∑i=1
lim supε→0
Fε(uε,Ωεi ) + lim sup
ε→0Fε(uε, Bε)+
+ lim supε→0
Fε(uε,Ωε0) + lim sup
ε→0
k∑i,j=1i 6=j
Fε(uε,Ωεij)
We now discuss each of the terms in the right hand side of the aboveinequality. First, it is easy to note from the definition of uε and Ωε
i that for ε
48

small enough we have ui ≡ αi on Ωεi , and this means that all the terms from
the sumk∑i=1
lim supε→0
Fε(uε,Ωεi )
are zero.We turn now to the second term, and note that by either of the construc-
tions (a) or (b) we have
lim supε→0
Fε(uε, Bε) = 0.
We go now to the third term and define Kεij = x ∈ Ω : 0 < hi(x) <
C1ε, 0 < hj(x) < C1ε, i > j. Since Ωε0 ⊂
⋃1≤j<i≤k
Kεij, by using Lemma 5
we find that there exists a constant K such that
Fε(uε, Kεij) =
∫Kεij
[ε|Duε|2 +
1
εW (uε)
]dx ≤ Kε−1|Kε
ij|.
Denote Stj = x ∈ Ω : hj(x) > mint, C1ε and using again the coareaformula we have
|Kεij| =
∫ C1ε
0
HN−1(x ∈ Ω : hi(x) = s, 0 < hj(x) < C1ε)ds ≤
≤ C1ε sup0≤s≤C1ε
HN−1(x ∈ Ω : hi(x) = s, 0 < hj(x) < C1ε)
= C1ε sup0≤s≤C1ε
HN−1(Σsi \ S
C1εj
).
For almost all ρ > 0 we have HN−1(∂Si ∩ ∂Sρj ) = 0, and therefore, usingLemma 6 we obtain:
lim supε→0
sup0≤s≤C1ε
HN−1(Σsi \ S
C1εj )
≤ lim supε→0
sup0≤s≤C1ε
HN−1(Σsi \ S
ρj ) =
= HN−1((∂Si ∩ (Ω \ Sj)) \ Sρj ).
Passing to the infimum for ρ > 0 we get that
lim supε→0
Fε(uε, Kεij) = 0,
and this implieslim supε→0
Fε(uε,Ωε0) = 0.
49

It remains now to estimate the terms of the form
lim supε→0
Fε(uε,Ωεij).
Using the coarea formula and (3.3) we obtain
Fε(uε,Ωεij) =
∫Ωεij
[ε|Duε|2 +
1
2W (uε)
]dx =
=
∫Ωεij
[ε|D(γij yijε hi)(x)|2 +
1
εW (γij yijε hi)(x)
]dx
=
∫ C1ε
0
[ε|γ′ij(yijε (t))|2[(yijε )′(t)]2 +
1
εW (γij yijε )(t)
]HN−1(Σt
i ∩ Sj)dt
≤ τε
∫ C1ε
0
[ε|γ′ij(yijε (t))|2[(yijε )′(t)]2 +
1
ε[δ +W (γij yijε )(t)]
]dt =
= τε
∫ C1ε
0
[|γ′ij(yijε (t))||(yijε )′(t)|
√δ +W (γij yijε )(t)
]dt ≤
≤ τε
∫ 1
0
√δ +W (γij(s))|γ′ij(s)|ds.
whereτε = sup
0≤t≤C1εHN−1(Σt
i ∩ Sj)
and by Lemma 6 we have
limε→0
τε = HN−1(∂Si ∩ ∂Sj).
By passing to lim sup as ε→ 0 in the above inequalities we get
lim supε→0
Fε(uε) ≤k∑
i,j=1
HN−1(∂Si ∩ ∂Sj)∫ 1
0
√δ +W (γij(s))|γ′ij(s)|ds.
Passing now to infimum as δ > 0 we get that
infδ>0
lim supε→0
Fε(uε) ≤ F0(u)
and by a diagonal argument the proof of (LS) property is finished.The proof is now almost done. We assumed that geodesics γij between
αi, αj exist, but if such geodesics do not exist, then we can choose approxi-mate geodesics γhij such that∫ 1
0
√W (γhij(s))|(γhij)′(s)|ds ≤ d(αi, αj) +
1
h,
50

and reasoning as above we can construct a sequence uhε such that
lim supε→0
Fε(uhε ) ≤
k∑i,j=1
HN−1(∂Si ∩ ∂Sj)(d(αi, αj) +1
h),
and again a diagonal argument finishes the proof. As a result of the above theorem and of the fact that every Γ-limit is
lower semicontinuous we ca see that the functional
F0(u) =k∑
i,j=1
d(αi, αj)HN−1(∂∗Si ∩ ∂∗Sj ∩ Ω)
is lower semicontinuous on the spaceX = u ∈ L1(Ω;RN) : u =∑k
i=1 αiχSi , Si ⊂Ω,PerΩ(Si) <∞, |Ω \ (S1 ∪ ... ∪ Sk)| = 0, and
∑ki=1 |Si|αi = m.
Definition 3.2. We say that a set of σij, 1 ≤ i, j ≤ k, i 6= j is an admissibleconfiguration if there exist linearly independent vectors α1, .., αk ∈ Rn
+ and acontinuous function W : Rn
+ → [0,∞) with zeros precisely at points αi, i =1..k such that we have d(αi, αj) = σij, i, j = 1..n.
Using the above result we can see that if σij, i, j = 1..k is an admissibleconfiguration then the functional F : K → [0,∞) defined by
F(S1, .., Sk) =∑
1≤i<j≤k
σijHN−1(∂∗Si ∩ ∂∗Sj ∩ Ω)
is lower semicontinuous on
K = (S1, .., Sk) : Si ⊂ Ω,PerΩ(Si) <∞, |Si| = ci > 0, c1 + ...+ ck = |Ω|,
where (ci) is the unique solution of the system
k∑i=1
ciαi = m,
where m is chosen such that all ci are positive.We would like to prove the existence of a function W : Rn → [0,∞) which
satisfies the hypothesis of the theorem and for which we have d(αi, αj) = σij,where σij, i, j = 1..k, i 6= j are given such that they satisfy the triangleinequalities σij < σik + σkj.
We note that the constants N, n, k are independent in Baldo’s theorem, sothere is no problem if we take n = k. We were not able to prove the existence
51

of the function W in the general case, but we can prove a weaker statementthat there exists a sequence of functions Wε such that the correspondingdε(αi, αj) approximate σij for 1 ≤ i < j ≤ n. This weaker statement isenough to guarantee the lower semicontinuity in the general case.
Remark 3.3. The fact that functionals of the form
F(S1, .., Sk) =∑
1≤i<j≤k
σijHN−1(∂∗Si ∩ ∂∗Sj ∩ Ω)
are lower semicontinuous for the L1(Ω) convergence of characteristic func-tions is proved in the article [2] of Ambrosio and Braides for functionals ofa more general type concerning partitions of sets of finite perimeter. In thatarticle necessary and sufficient conditions are given for the lower semiconti-nuity to take place. In particular, Example 2.8 from the cited article dealswith functionals as the one presented above.
If a, b ∈ Rn then we denote [a, b] = ta+ (1− t)b : t ∈ [0, 1] the segmentwhich connects a and b.
First we make a choice of αi ∈ Rn+, i = 1..n such that the pairwise
euclidean distance between αi and αj is 1 and the vectors αi, i = 1..n arelinearly independent. One obvious possibility is
αi =1√2
(0, .., 1, .., 0) + v,
where 1 is on the i-th coordinate of the vector and v ∈ Rn+ is a vector with
|v| sufficiently large such that each αi is contained in Rn+ together with a
ball centered in it with a given radius to be specified later. For each αi weconsider a ball Di of small enough radius δ centered in αi. We can now define
a function G on⋃
1≤i<j≤n
[αi, αj] ∪n⋃i=1
Di such that the path integral of G on
[αi, αj] is σij. First define the function G on each Di by
G(x) = |x− αi|.
Define f : [0, 1]→ R+ piecewise linear such that f(0) = f(1) = 0, f(δ) =
f(1− δ) = δ and fij(1/2) = hij, where hij is chosen so that∫ 1
0fij(t)dt = σij.
Here we need to choose δ small enough such that hij > δ for every 1 ≤ i <j ≤ n. Now define G : [αi, αj]→ R+ by
(1− t)αi + tαj 7→ fij(t), ∀t ∈ [0, 1].
52

Then we can prove that∫[αi,αj ]
Gds =
∫ 1
0
G((1− t)αi + tαj)|αi − αj|dt =
∫ 1
0
fij(t)dt = σij.
If we denote by K =⋃
1≤i<j≤n
[αi, αj] ∪n⋃i=1
Di then by using the procedure
defined above, we can define a function G : K → [0,∞) with zeros onlyat αi, i = 1..n such that for every Lipschitz continuous injective curve γ :[0, 1]→ [αi, αj] such that γ(0) = αi, γ(1) = αj, we have∫ 1
0
G(γ(t))|γ′(t)|dt = σij.
The triangle inequalities between σij show that the minimal distance betweenαi and αj using the metric
d(ξ1, ξ2) = inf
∫ 1
0
G(γ(t))|γ′(t)|dt, γ ∈ L([0, 1], K), γ(0) = αi, γ(1) = αj
on K is indeed σij (we denoted by L([0, 1], K) the space of Lipschitz con-tinuous paths defined on [0, 1] with values in K). Since K is a closed set ofRn we can extend G continuously to Rn
+, and we can assume without loss ofgenerality that the extension is greater or equal to δ > 0 outside
⋃ni=1Di and
has zeros at precisely αi, i = 1..n. Denote by G this extension. We definethe following functions for ε > 0:
Gε : Rn+ → [0,∞), Gε(x) = G(x) +
1
εd(x,K)
Since K is a closed set, the functions Gε are continuous. Define by the sameprocedure as above the distance dε(ξ1, ξ2) on Rn
+ defined by the continuousfunction Gε.
The following theorem proves that given the set of distances σij, we canconstruct a sequence of functions like above for which the distances from αito αj in the metric we defined above approximate σij.
Theorem 3.3. Consider σij, 1 ≤ i, j ≤ n, i 6= j such that σij = σji andthey satisfy the triangle inequalities: σij ≤ σik+σkj, 1 ≤ i, j, k ≤ n, for i, j, kdistinct.
Then for the sequence of functions Wε = (Gε)2 defined like above we have
for ε→ 0 thatlimε→0
dε(αi, αj) = σij.
53

Proof: First note that dε(αi, αj) ≤ σij since Gε and G have the samevalues on K.
Define
Xij = γ ∈ C1([0, 1],Rn+), γ(0) = αi, γ(1) = αj, |γ′| > 0
and
Fε : Xij → [0,∞), Fε(γ) =
∫ 1
0
Gε(γ(t))|γ′(t)|dt.
Suppose that lim infε→0
dε(αi, αj) < σij. Then there exists τ > 0, εn → 0 and
γn ∈ Xij such that Fεn(γn) < σij−τ . Since the value of the integrals does notdepend on the given parametrization, we assume that γn are parametrizedwith constant speed. Since the length of any curve connecting αi and αj isgreater or equal to 1, and the size of the constant speed is in fact the lengthof γn we have |γ′n| = cn ≥ 1. Therefore we have∫ 1
0
G(γn(t))dt+1
εn
∫ 1
0
d(γn(t), K)dt ≤ Fεn(γn) < σij − τ,
for every n ∈ Z+.Since the values of Gε get really big for x at great distance from K (as-
sumption (3.1)), we can assume that the curves γn are all contained in asufficiently big compact neighborhood L of K. Furthermore, since the func-tion G takes values greater or equal to δ > 0 outside the disks Di centered inαi, i = 1..n it follows that the lengths of γn are bounded above by a constantdepending on δ. Therefore γn are equibounded and equicontinuous, whichmeans according to Ascoli-Arzela theorem that (γn) contains an uniformlyconvergent subsequence to a continuous path γ : [0, 1]→ RN . For simplicity,assume that (γn) converges uniformly to γ.
If γ([0, 1]) 6⊂ K then by Fatou’s lemma we get
∞ = lim infn→∞
1
εn
∫ 1
0
d(γn(t), K)dt ≤ σij − τ,
which is a contradiction. Therefore we do have γ([0, 1]) ⊂ K. Since cn =|γ′n| is bounded it contains a convergent subsequence, and without loss ofgenerality suppose that cn → c ≥ 1. Since each γn is Lipschitz continuouswith Lipschitz constant cn it follows that γ is also Lipschitz continuous withconstant c = limn→∞ cn.
Therefore by applying Fatou’s lemma we get that∫ 1
0
G(γ(t))|γ′(t)|dt ≤ lim inf
∫ 1
0
G(γn(t))|γ′n(t)|dt ≤ σij − τ.
54

Since γ([0, 1]) ⊂ K then by the construction of the function G we have
σij ≤∫ 1
0
G(γ(t))|γ′(t)|dt.
This contradicts the previous inequality, and therefore we conclude that theinitial assumption was false and
lim infε→0
dε(αi, αj) ≥ σij.
This result together with the fact that dε(αi, αj) ≤ σij finishes the proof ofthe theorem.
First note that by a diagonal argument we can choose a sequence εn suchthat dεn(αi, αj) is increasing for every 1 ≤ i < j ≤ n (we can do this sincewe have dε(αi, αj) ≤ σij for every 1 ≤ i < j ≤ n).
Also note that the functions Wε = (Gε)2 satisfy the necessary hypothe-
ses for Baldo’s Theorem, since Wε grows superlinearly near any of its zerosαi, i = 1..n.
This means that Baldo’s Theorem is applicable and all of the functionals
Fn(u) =n∑
i,j=1
dεn(αi, αj)HN−1(∂∗Si ∩ ∂∗Sj ∩ Ω)
are lower semicontinuous on X and moreover the sequence Fn is increasing.Therefore its pointwise limit is also lower semicontinuous on the space X.But the pointwise limit of the considered sequence is up to a constant factorequal to
F(S1, .., Sn) =∑
1≤i<j≤n
σijHN−1(∂∗Si ∩ ∂∗Sj ∩ Ω)
which allows us to state the following theorem:
Theorem 3.4. Suppose Ω is a bounded open subset of RN with Lipschitzboundary. Given real positive numbers σij, 1 ≤ i, j ≤ n such that σij = σjiand σij ≤ σik + σkj for 1 ≤ i, j, k,≤ n then the functional F : K → [0,∞)defined by
F(S1, .., Sn) =∑
1≤i<j≤n
σijHN−1(∂∗Si ∩ ∂∗Sj ∩ Ω)
is lower semicontinuous for the L1(Ω) convergence of the characteristic func-tions, where
K = (S1, .., Sn) : Si ⊂ Ω,PerΩ(Si) <∞, |Si| = ci > 0, c1 + ...+ ck = |Ω|.
55

The proof can be recovered from the facts presented above. If we considerfunctionals of the general form discussed in the previous section (similar tothe article of Massari [20]) with the terms which describe the contact withthe boundary of the container and the gravity term we arrive at an energyfunctional of the form
E(S1, .., Sn) =∑
1≤i<j≤n
σijHN−1(∂∗Si ∩ ∂∗Sj ∩ Ω)+
+n∑i=1
βiHN−1(∂∗Si ∩ ∂Ω) +n∑i=1
gρi
∫Ω
xNχSidx.
The conditions we imposed in the proof of the lower semicontinuity were
• σij ≥ 0, σij ≤ σik + σkj, 1 ≤ i, j, k,≤ n.
• |βi − βj| ≤ σij, 1 ≤ i, j ≤ n.
As we discussed earlier, the gravity term is continuous, as we consideronly bounded containers Ω, so this term poses no problems. One trick whichallows us to prove the lower semicontinuity of this functionals using the resultproved above is noticing that if we modify all βi, i = 1..n with a constantc, then the value of the energy functional modifies with a constant cPer(Ω)which doesn’t affect the lower semicontinuity property. Furthermore, we canconsider an imaginary container Ω′ which contains Ω, and a supplementaryfluid Ω′ \ Ω which has the interfacial tensions
σi(n+1) = βi + c,
where c is great enough such σij, 1 ≤ i, j ≤ n + 1 verify the hypotheses ofthe above theorem. Therefore we have proved the following theorem:
Theorem 3.5. Suppose Ω is a bounded open subset of RN with Lipschitzboundary. Given real positive numbers σij, 1 ≤ i, j ≤ n such that σij = σjiand σij ≤ σik + σkj for 1 ≤ i, j, k,≤ n, and βi, i = 1..n real numbers whichsatisfy the inequalities |βi − βj| ≤ σij, 1 ≤ i, j ≤ n. Then the functionalF : K → [0,∞) defined by
F(S1, .., Sn) =∑
1≤i<j≤n
σijHN−1(∂∗Si ∩ ∂∗Sj ∩ Ω)+
+n∑i=1
βiHN−1(∂∗Si ∩ ∂Ω) +n∑i=1
gρi
∫Ω
xNχSidx
56

is lower semicontinuous for the L1(Ω) convergence of the characteristic func-tions, where
K = (S1, .., Sn) : Si ⊂ Ω,PerΩ(Si) <∞, |Si| = ci > 0, c1 + ...+ ck = |Ω|.
The last theorem generalizes the results of Massari [20] for 2 and 3 fluidsto an arbitrary finite number of fluids, under the same assumptions on thecoefficients σij, βi, i, j = 1..n, but with less regularity for the boundary ofΩ. In the proofs of Massari the fact that Ω has C1 boundary was essentialfor the trace inequalities used in the proof. In our case, the fact that Ω hasLipschitz continuous boundary suffices.
57

4 Numerical Results
We will present here some numerical results for the isoperimetric inequalityand for the equilibrium configuration of immiscible fluids. These results areobtained with the aid of the Γ-convergence results proved in the previoussection.
The numerical results are obtained in Matlab using a toolbox designed byEdouard Oudet and a Matlab implementation of the quasi-Newton algorithmBFGS called Limited Memory BFGS for the optimization part.
The toolbox gets as an input a string which contains the function whoseintegral we want to optimize, the variables contained in this function, the setΩ and a discretization of Ω, and the linear operators needed to approximate∇u on the discrete points. The toolbox then returns an approximation ofthe function and of the gradient.
The LBFGS algorithm does the optimization part, and its advantage isthat it doesn’t need the computation of the Hessian matrix, which can bea great cost in the calculation when the size of the optimization problem islarge, like in shape optimization problems. LBFGS takes as an input a vectorcontaining the initial values of the function, and the function to minimize.Since we also want to include a volume constraint in the algorithm, we usea gradient projection to introduce the constraint on the measure.
4.1 Isoperimetric problem
In this section we present the numerical results of two Γ-convergence theo-rems: Modica-Mortola theorem, which we proved in the previous section anda Γ-convergence theorem regarding an anisotropic perimeter functional.
First we deal with Modica-Mortola’s theorem. Recall that one of the good
properties of the Γ-convergence is that if FεΓ−→ F then any limit point of the
minimizers of Fε as ε → 0 is a minimizer for F . Since the Modica-Mortolatheorem provides an approximation by Γ-convergence of the perimeter of aset, expect that we will obtain approximations of the circle or of the sphere.
The algorithm minimizes the functional
Fε(u) = ε
∫Ω
|∇u|2dx+1
ε
∫Ω
W (u(x))dx,
where W is a positive continuous function which has only 0 and 1 as zeros.In our case we choose
W : R→ [0,∞), W (x) = x2(1− x)2.
58

We work in Ω = [0, 1]2 or Ω = [0, 1]3 with or without periodic conditions.When we have periodic conditions on the boundary of Ω, the result behaves asif Ω is the whole space, and the perimeter is the usual perimeter. If we do nothave periodic condition, then the problem converges to the minimizer of therelative perimeter with respect to Ω. As an initial data we choose a functionu with randomly taken values which has the desired measure. When theprogram is called the user must specify the resolution of the problem, whichdetermines the size of the problem. Usually, if we increase the resolution thenthe result has better details, but the computation time increases. Examples ofresolutions are (60, 60) for two dimensions or (40, 40, 40) for three dimensions.It can be observed that given random input data the problem converges to agood approximation of the perimeter for ε = 1/n where n is the size of oneof the dimensions of the resolutions (e.g. n = 60 for (60, 60)).
(a) Initial ε (b) ε 7→ ε/2
(c) ε 7→ ε/4 (d) ε 7→ ε/10
Figure 10: Results for different values of ε in the periodic case on a 200×200resolution
We cannot take ε very small for any configuration, because then the
59

interface term is negligible and since the term containing W prevails, theresult is usually not a circle, but small sets scattered in [0, 1]2. To see thefact that the Modica Mortola theorem really can approximate the minimizerfor the perimeter functional we decrease ε, but we don’t take a random initialconfiguration, but the result of the previous optimization.
(a) Initial ε (b) ε 7→ ε/2
(c) ε 7→ ε/4 (d) ε 7→ ε/10
Figure 11: Results for different values of ε in the non-periodic case on a200× 200 resolution
For example, if we work on a 60× 60 resolution and random initial data,then ε = 1/60 and the result is an approximation of the circle, with a smallinterface region. We save this configuration and we run the program againon a 60 × 60 resolution, but this time we use the result of the previous runof the algorithm as the initial configuration. We can observe that the resultis again an approximation of the circle, but with a smaller interface region,which is exactly what Modica-Mortola theorem predicts. Note that when wemake ε ten times smaller, the interface region becomes so thin that the underthe given resolution the result is not different from a circle.
60

If we remove the boundary periodicity we arrive at the desired result andfind the shape which minimizes the relative perimeter, i.e. a quarter of acircle centered in a corner of the square. Again, note that as ε diminishes,the approximation is better.
4.2 Anisotropic problem
In the following we would like to obtain numerical results for the anisotropiccase. In the previous case, the goal was to simply minimize the perimeter,and the perimeter is invariant to translations, rotations or other rigid motionsand we have the same cost for the boundary whatever orientation it may have.However, it may happen, for example in the study of crystals, that we do nothave the same cost for all directions of the boundary. Some directions maybe favored and the boundary of the optimal shape will try and take thosedirections which cost the least. Before presenting some of these result, we willmention the theoretical motivation behind them, and that is a Γ-convergencetheorem for the anisotropic case. This theorem will be given without proof,since it resembles the treatment of [4] and [21]. A proof can be found in [6].First we need a few preliminary results.
We introduce now the anisotropic couple (φ, φ0) in the following way.Consider φ : RN × RN → [0,∞) a continuous function which satisfies thefollowing conditions:
• φ(x, tξ) = |t|φ(x, ξ), ∀x ∈ RN , ξ ∈ RN , t ∈ R.
• There exist constants λ,Λ > 0 such that
λ|ξ| ≤ φ(x, ξ) ≤ Λ|ξ|, ∀x ∈ RN , ξ ∈ RN .
• The function φ is strictly convex with respect to ξ.
Given φ we define by duality the function φ0 : RN → RN by
φ0(x, ξ) = supξ∗ · ξ : φ(x, ξ) ≤ 1.
We are interested in the case where both φ and φ0 are strictly convex in ξand of class C2(RN × (RN \ 0)).
Here are a few examples of such pairs (φ, φ0):
• φ(x, ξ) = |ξ|`p , 1 < p <∞, φ0(x, ξ) = |ξ|`q where1
p+
1
q= 1.
• φ(x, ξ) =
√N∑i=1
aiξ2i , φ
0(x, ξ) =
√N∑i=1
a−1i ξ2
i with ai > 0, i = 1..N .
61

• φ(x, ξ) = a(x)|ξ|, φ0(x, ξ) = 1a(x)|ξ| where x 7→ a(x) is strictly positive
and bounded.
If the anisotropies are not local, i.e. they do not depend on the spacevariable x, then we call Bφ = ξ ∈ RN : φ(ξ) ≤ 1 the Wulff shape andBφ0 = ξ ∈ RN : φ0(ξ) ≤ 1 the Frank diagram. In our study we willconsider non-local anisotropies.
We define the anisotropic perimeter determined by φ of Ω a measurableset in RN in the following way:
Pφ(Ω) = Cφ sup
∫Ω
div(ϕ)dx : ϕ ∈ C∞0 (Ω;RN), ‖φ(ϕ)‖L∞(Ω) ≤ 1
.
As an immediate consequence, if Ω is an open set with C1 boundary we have
Pφ(Ω) = Cφ
∫∂Ω
φ0(~n)ds.
The constant Cφ is defined as
Cφ = ωN detN
(φ),
where ωN is the volume of the unit ball in RN and detN(φ) = |Bφ|−1.Now we can present the Γ-convergence result for the anisotropic perime-
ter. Consider an anisotropic couple (φ, φ0) like presented above. Consider afunction W : RN → [0,∞) positive with only two zeros at 0 and 1 (like inthe Modica-Mortola theorem). Define the following functionals on L1(RN):
Jε(u) =
∫Rd
[ε(φ0(x,∇u))2 +
1
εW (u)
]dHN
φ u ∈ H1(RN)
∞ otherwise
and
J(u) =
Pφ(Ω) u = χΩ
∞ otherwise,
where dHNφ = ωN detN(φ)dx, which in our case is a constant multiplied with
the Lebesgue measure.
Then we have that JεΓ−→ cWJ in the L1(RN) convergence, where cW
is a constant which depends on the expression of the function W . For aproof and other facts see [6] and [5]. More details about the anisotropiccouples and their properties can be found in Elie Bretin’s phd thesis [9]. Oneparticularity of the Wulff shapes is that the anisotropic curvature defined by
62

the pair (φ, φ0) is constant on the Wulff shape Bφ, and so we expect thatwhen we try and find the minimizer for Pφ(Ω) when Ω has constant volumewe obtain these Wulff shapes.
In the following we will see what results we can obtain by using differentanisotropic couples (φ, φ0). We will often mention only φ0, since sometimes itis difficult to determine φ given φ0, but the resulting Wulff shape can alwaysbe deduced from the expression of φ0.
Figure 12: Results for θ = 0 and θ = π/3
Figure 13: Results for θ = 0, τ = π/2 and θ = 2π/3, τ = π/6
In the first case, we notice that by using functions like
φ0(ξ) =√b1ξ2
1 + b2ξ22
we only obtain shapes which are elongated in the horizontal or vertical direc-tion (depending on the ordering of b1, b2 > 0). To be able to obtain shapes
63

which have another preferred direction we can use a functional of the formφ0(ξ) = ‖Aθa,bξ‖ where
Aθa,b =
( √a cos θ
√a sin θ
−√b sin θ
√b cos θ
).
If 0 < b << a then such a functional produces shapes which are elongatedin the direction (cos θ, sin θ), where θ ∈ [0, 2π] is a custom angle. Noticethat the matrix A rotates a vector around the origin with angle θ and thenit multiplies the first coordinate with
√a and the second coordinate with√
b. Note that the vector which is normal to the direction (cos θ, sin θ) isvertical after the rotation, and only the second component is multiplied by√b, whereas the first component which should be multiplied by the greater
factor√a is zero, so the function has smaller values for vectors parallel
to the mentioned direction. Moreover, the function satisfies all the neededhypotheses, so the Γ-convergence theorem holds, and some numerical resultsfor different angles are presented in Figure 12.
Using matrices of the form Aθa,b we can build functionals which have morethan one preferred directions, for example
φ0(ξ) =√‖Aθa,bξ‖‖Aτc,dξ‖,
with 0 < b << a, 0 < d << c, is a functional which has preferred directionsgiven by θ, τ ∈ [0, 2π]. This functional satisfies all the desired conditions,but it is not convex for any given values of a, b, c, d. Still, the algorithmconverges, and you can see in Figure 13 the results obtained.
Consider d1 = (1, 0), d2 = (12,√
32
), d3 = (12,−√
32
), p = 1.1 and
φ0(ξ) =
(3∑i=1
|ξ · di|p) 1
p
.
64

Figure 14: Results for different values of ε in the non-periodic case on a200× 200 resolution in the anisotropic case
Since minimizing the anisotropic perimeter means finding sets Ω which mini-
mize
∫∂Ω
φ0(~n)ds, the minimizer will seek to find directions of the normal for
which φ0 has smaller values, and in our case, for this to happen, the normal ~nshould be orthogonal to d1, d2 or d3, i.e. the boundary of Ω will seek to followthe directions d1, d2 and d3. This can be seen in the numerical simulationpresented here (see figure 14) . The starting point for the first figure wasa circle, and then recursively, after the first figure, each of the other figureshave as starting configuration the preceding figure, with ε diminished.
Remark 4.1. The same method can be used to study numerically problemsof the form
min∫∂Ω
f(x)dHN−1(x) :
∫Ω
g(x) = c
and
min
∫∂Ωf(x)dHN−1(x)∫
Ωg(x)dx
: |Ω| = c
4.3 Optimal Partitions
The numerical study of optimal partitions is still in progress. The problemcomes from the projection algorithm, which is more difficult to devise forpartitions since we must introduce constraints on all the volumes and thenon-overlapping constraint. We were only able to obtain numerical resultsfor partitions in two fluids, which is not a very big step from the isoperimetricproblem, since we’ve seen in the proof in the second section that the twoproblems are equivalent. Gravity energy can be introduced without problems,but adding the boundary terms is not an easy task.
65

Figure 15: Configuration of two fluids without gravity in peri-odic/nonperiodic case
Figure 16: Configuration of two fluids with gravity
66


5 Conclusions
The study performed here extended the results of the article of Massari [20]from the case of two and three fluids to the case of an arbitrary number offluids.
The proofs presented in the second section are adapted after the proofsof Massari, but use a different trace inequality which allows a more generalsetting, since there are sets with C1 boundary which do not have the interiorsphere property.
During the study of the articles of Baldo [4] and Modica [21] we foundthat the proofs do not work in general for all continuous functions W if wedo not add some conditions which allow us to correct the volume in theconstructing of recovery sequences in the Γ-convergence proof. The proofof the Modica-Mortola theorem can still be made for general functions Wbut with another volume correcting procedure. We proposed two alternativeadditional hypotheses on the function W which allow us to use the methodsfrom the article of Baldo [4]. One of the methods was an obvious bound fromabove on the function W , which is reasonable since we are only interested inthe values of W near its zeros, and outside a great compact set we can trun-cate the function to a very large value. The second hypothesis was suggestedin an email discussion with Sisto Baldo about the absence of some additionalnecessary conditions on the function W for the proof of the theorem to work.
The construction of the functions W in the approximation theorem isoriginal, but unfortunately it is not simple enough to be used in numeri-cal algorithms. It would be nice to find a polynomial function W with thedesired properties as in the case of the Modica-Mortola theorem, but thedifficulty comes from the fact that the geodesics (or approximate geodesics)on the graph of
√W depend on W and so whenever we change the function
W we cannot be sure that the shortest paths on the graph of√W are the
same. The extension of the theorems in the article of Massari to an arbi-trary number of fluids is new and so is also the basic idea is that the lowersemicontinuity property for the problem without boundary terms implies thelower semicontinuity for the configuration with boundary terms.
Here are a few perspective ideas:
• Continue the numerical study for the case of partitions with n ≥ 3parts. Eventually add the boundary terms and the gravitational energyand compare the results with some physical experiments.
• Study the geometric properties of the optimal configuration: radialsymmetry in the case of a cylindrical container, for example. At a firstglance, uniqueness does not seem to occur when we do not consider
68

gravitational energy, but gravity usually orders the fluids with differentweights in horizontal layers, which may yield uniqueness in some cases.
• Study the regularity of the optimal configuration after the model ofGiusti [17] for minimal surfaces.
• Prove the Γ-convergence result of Baldo for the configuration withboundary terms and, eventually for anisotropic perimeter.
69

References
[1] Smythsonian Physical Tables 9th Revised Edition. Table 360, Surfacetension of liquids.
[2] Luigi Ambrosio and Andrea Braides. Functionals defined on partitionsin sets of finite perimeter. II. Semicontinuity, relaxation and homoge-nization. J. Math. Pures Appl. (9), 69(3):307–333, 1990.
[3] G. Anzellotti and M. Giaquinta. BV functions and traces. Rend. Sem.Mat. Univ. Padova, 60:1–21 (1979), 1978.
[4] Sisto Baldo. Minimal Interface Criterion for Phase Transitions in Mix-tures of Cahn-Hilliard fluids. Annales de l’I.H.P., section C, Tome 7,No. 2, pages 67–90, 1990.
[5] G. Bellettini and M. Paolini. Anisotropic motion by mean curvaturein the context of Finsler geometry. Hokkaido Math. J., 25(3):537–566,1996.
[6] Andrea Braides. Approximation of Free-Discontinuity Problems.Springer, 1998.
[7] Andrea Braides. Gamma-Convergence for beginners. Oxford UniversityPress, 2002.
[8] Andrea Braides. A Handbook of γ-convergence. 2006.
[9] Elie Bretin. Mouvements par Courbure Moyenne et Methode de Champde Phase. PhD thesis, 2009.
[10] Giuseppe Buttazzo. Gamma-convergence and its Applications to SomeProblems in the Calculus of Variations. School on HomogenizationICTP, Trieste, September 6-17, 1993.
[11] John W. Cahn. Critical point wetting. The Journal of Chemical Physics,66(8):3667–3672, 1977.
[12] Pierre-Gilles de Gennes, Francoise Brochard-Wyart, and David Quere.Capillarity and Wetting Phenomena, Drops, Bubbles, Pearls, Waves.Springer, 2004.
[13] Ennio De Giorgi and Tullio Franzoni. Su un tipo di convergenza vari-azionale. Atti Accad. Naz. Lincei Rend. Cl. Sci. Fis. Mat. Natur. (8),58(6):842–850, 1975.
70

[14] Lawrence C. Evans and Ronald F. Gariepy. Measure theory and fineproperties of functions. Studies in Advanced Mathematics. CRC Press,Boca Raton, FL, 1992.
[15] Herbert Federer. Geometric measure theory. Die Grundlehren der math-ematischen Wissenschaften, Band 153. Springer-Verlag New York Inc.,New York, 1969.
[16] Wendell H. Fleming and Raymond Rishel. An integral formula for totalgradient variation. Arch. Math. (Basel), 11:218–222, 1960.
[17] Enrico Giusti. Minimal surfaces and functions of bounded variation,volume 80 of Monographs in Mathematics. Birkhauser Verlag, Basel,1984.
[18] John E. Hilliard John W. Cahn. Free Energy of a Nonuniform System.I. Interfacial Free Energy. J. Chem. Phys., 28:258, 1958.
[19] Giovanni Leoni. A First Course in Sobolev Spaces. Graduate Studies inMathematics, Vol 105. American Mathematical Society, 2009.
[20] U. Massari. The parametric problem of capillarity: The case of two andthree fluids. Asterisque, (118):197–203, 1984. Variational methods forequilibrium problems of fluids (Trento, 1983).
[21] Luciano Modica. Gradient Theory of Phase Transitions with BoundaryContact Energy. Ann. Inst. H. Poincare Anal. Non Lineaire, 4(5):487–512, 1987.
[22] Luciano Modica. The gradient theory of phase transitions and the min-imal interface criterion. Arch. Rational Mech. Anal., 98(2):123–142,1987.
[23] Edouard Oudet. Approximation of partitions of least perimeter by Γ-convergence: around Kelvin’s conjecture. Exp. Math., 20(3):260–270,2011.
[24] J.S. Rowlinson and B. Widom. Molecular Theory of Capillarity. DoverPublications, INC., Mineola, New York, 1988.
[25] Italo Tamanini. Il problema della capillarita su domini non regolari.Rend. Sem. Mat. Univ. Padova, 56:169–191 (1978), 1976.
71