MTF270-Turbulence Modeling-Large Eddy Simulations.pdf
29
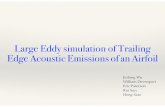
Lars Davidson: MTF270 Turbulence Modelling http://www.tfd.chalmers.se/doct/comp turb model 41 Large Eddy Simulations February 23, 2006 Time averaging and filtering In CFD we time average our equations to get the equations in steady form. This is called Reynolds time averaging : hΦi = 1 2T Z T -T Φ(t)dt, Φ= hΦi +Φ 0 (67) (note that we use the notation h.i for time averaging). In LES we filter (volume average) the equations. In 1D we get: ¯ Φ(x, t)= 1 Δx Z x+0.5Δx x-0.5Δx Φ(ξ,t)dξ Φ= ¯ Φ+Φ 00 no filter one filter 2 2.5 3 3.5 4 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 u , ¯ u x Since in LES we do not average in time, the filtered vari- ables are functions of space and time. Large Eddy Simulations
description
Computational Fluid Dynamics
Transcript of MTF270-Turbulence Modeling-Large Eddy Simulations.pdf

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 41
Large Eddy Simulations February 23, 2006
Time averaging and filtering
In CFD we time average our equations to get the equationsin steady form. This is called Reynolds time averaging:
〈Φ〉 =1
2T
∫ T
−T
Φ(t)dt, Φ = 〈Φ〉 + Φ′ (67)
(note that we use the notation 〈.〉 for time averaging). InLES we filter (volume average) the equations. In 1D weget:
Φ(x, t) =1
∆x
∫ x+0.5∆x
x−0.5∆x
Φ(ξ, t)dξ
Φ = Φ + Φ′′
no filter one filter
2 2.5 3 3.5 40.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
PSfrag replacements
u,
u
x
Since in LES we do not average in time, the filtered vari-ables are functions of space and time.
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 42
The equations for the filtered variables have the sameform as Navier-Stokes, i.e.
∂ui
∂t+
∂
∂xj(uiuj) = −1
ρ
∂p
∂xi+ ν
∂2ui
∂xj∂xj− ∂τij
∂xj
∂ui
∂xi= 0
(68)
where the subgrid stresses are given by
τij = uiuj − uiuj (69)
Contrary to Reynolds time averaging where 〈u′i〉 = 0, we
have hereu′′
i 6= 0
ui 6= ui
Note that for the spectral cut-off filter ui = ui, see p. 46.However, in finite volume methods, box filters are alwaysused. In this course we use box filters, if not otherwisestated.
Differences between time-averaging (RANS) and spacefiltering (LES)
In RANS, if a variable is time averaged twice (〈〈u〉〉), it isthe same as time averaging once (〈u〉). This is because 〈u〉is not dependent on time. From Eq. 67 we get
〈〈u〉〉 =1
2T
∫ T
−T
〈u〉dt =1
2T〈u〉2T = 〈u〉
This is obvious if the flow is steady, i.e. ∂〈u〉/∂t = 0. Ifthe flow is unsteady, we must assume a separation in time
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 43
scales, i.e. T � t, where t is the time scale for the meanflow. In practice this requirement is rarely satisfied.
In LES, u 6= u (and since u = u + u′′ we get u′′ 6= 0).PSfrag replacements
u , u
x
I I + 1I − 1
x
xx
A B
∆x
Let’s filter uI once more (filter size ∆x, see figure above).For simplicity we do it in 1D. (Note that subscript I denotesnode number.)
uI =1
∆x
∫ ∆x/2
−∆x/2
u(ξ)dξ =1
∆x
(∫ 0
−∆x/2
u(ξ)dξ +
∫ ∆x/2
0
u(ξ)dξ
)=
=1
∆x
(∆x
2uA +
∆x
2uB
).
The trapezoidal rule, which is second-order accurate, wasused to estimate the integrals. u at locations A and B (seefigure above) is estimated by linear interpolation, whichgives
uI =1
2
[(1
4uI−1 +
3
4uI
)+
(3
4uI +
1
4uI+1
)]
=1
8(uI−1 + 6uI + uI+1) 6= uI
(70)
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 44
Resolved & SGS scales
•The basic idea in LES is to resolve (large) grid scales (GS),and to model (small) subgrid-scales (SGS).
The limit (cut-off) between GS and SGS is supposed totake place in the inertial subrange (II), see figure below.PSfrag replacements
u , u
x
II + 1I − 1
x
xAB
∆x
I
II
III
κ
E(κ)cut-off
I: large, energy-containing scalesII: inertial subrange (Kolmogorov −5/3-range)III: dissipation subrange
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 45
The box-filter and the cut-off filter
The filtering is formally defined as (1D)
u(x) =
∫ ∞
−∞G(r)u(x − r)dr
∫ ∞
−∞G(r)dr = 1
(71)
It is often convenient to study the filtering process in thespectral space using Fourier transforms defined as
u(κ) =1
2π
∫ ∞
0
u(r) exp(−ıκr)dr (72)
and its inverse
u(r) =
∫ ∞
0
u(κ) exp(ıκr)dκ (73)
where κ denotes the wavenumber and ı =√−1. Using the
convolution theorem (saying that the integrated product oftwo functions is equal to the product of their Fourier trans-forms) the filtering in Eq. 71 is conveniently written (as-suming homogeneous turbulence)
u(κ) = u(κ) =1
2π
∫ ∞
0
u(η) exp(−ıκη)dη
=1
2π
∫ ∞
0
∫ ∞
0
exp(−ıκη)G(ρ)u(η − ρ)dρdη
=1
2π
∫ ∞
0
∫ ∞
0
exp(−ıκρ) exp(−ıκ(η − ρ))G(ρ)u(η − ρ)dρdη
=1
2π
∫ ∞
0
∫ ∞
0
exp(−ıκρ) exp(−ıκξ)G(ρ)u(ξ)dξdρ = G(κ)u(κ)
(74)
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 46
The filter used in spectral space is the cut-off filter, whichfilters out all scales with wavenumber larger than the cut-off wavenumber κc = π/∆. This is defined as
G(κ) =
{1 if κ ≤ κc
0 otherwise(75)
If we filter twice with the cut-off filter we get
u = GGu = Gu = u (76)
using Eqs. 74 and 75. Thus, contrary to the box-filter (seeEq. 70), nothing happens when we filter twice in spectralspace.
We have mentioned the volume filter (box filter), whichfilters out fluctuations in space with scales smaller than ∆.It reads
G(r) =
{1/∆ if r ≤ ∆/20 otherwise
(77)
Note that the box filter is sharp in physical space but notin wavenumber space; for the cut-off filter it is vice versa.
In finite volume methods box filtering is always used.Furthermore implicit filtering is employed. This meansthat the filering is the same as the discretization (=inte-gration over the control volume which is equal to the filtervolume, see Eq. 79).
Subgrid model
We need a subgrid model to model the turbulent scaleswhich cannot be resolved by the grid and the discretizationscheme.
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 47
The simplest model is the Smagorinsky model (Smagorin-sky, 1963):
τij −1
3δijτkk = −2νsgssij
νsgs = (CS∆)2√
2sij sij ≡ (CS∆)2 |s|
sij =1
2
(∂ui
∂xj+
∂uj
∂xi
) (78)
and the filter-width is taken as the local grid size
∆ = (∆VIJK)1/3 (79)
Because the SGS turbulent fluctuations near a wall goto zero, so must SGS viscosity. A damping function fµ isadded to ensure this
fµ = 1 − exp(−y+/26) (80)
Disadvantage of Smagorinsky model: the “constant” CS
is not constant, but it is flow-dependent. It is found to varyin the range from C = 0.065 (Moin & Kim, 1982) to C =
0.25 (Jones & Wille, 1995).
Smagorinsky model vs. mixing-length model
The eddy viscosity according to the mixing length theoryreads in boundary-layer flow (Hinze, 1975; Schlichting, 1979)
νt = `2
∣∣∣∣∂U
∂y
∣∣∣∣ .
Generalized to three dimensions, we have
νt = `2
[(∂Ui
∂xj+
∂Uj
∂xi
)∂Ui
∂xj
]1/2
= `2 (2SijSij)1/2 ≡ `2|S|.
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 48
In the Smagorinsky model the SGS turbulent length scalecorresponds to ` = CS∆ so that
νsgs = (CS∆)2|s|which is the same as Eq. 78
Smagorinsky model derived from the k−5/3 law
Another way to derive Eq. 78 is as follows. The subgridmodel is supposed to model the turbulence with scales `II ,where `II is the inverse of the wave number `II = 1/κII inthe inertial subrange, see the figure below.
PSfragreplacem
entsu
,uxI
I+
1I−
1xxAB∆
xIIIIIIκ
E(κ
)
cut-off
III
III
κ
E(κ)
Spectrum for k. I: Range for the large, energy containingeddies. II: the inertial subrange for isotropic scales, inde-pendent of the large scales (`) and the dissipative scales (ν).III: Range for small, isotropic, dissipative scales.
In the inertial subrange the turbulence is at large Reynoldsnumber independent of the large scale as well as of thesmall scales. This range is characterized by the dissipa-tion ε and the wavenumber ∆ = 1/κII . Thus we can writethe SGS viscosity as
νsgs = εa(CS∆)b (81)Dimensional analysis yields a = 1/3, b = 4/3 so that
νsgs = (CS∆)4/3ε1/3. (82)
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 49
The scales in the inertial subrange are isotropic, and thusthey are in local equilibrium, i.e. in the ksgs equation wehave that production balances dissipation
2νsgssij sij = ε. (83)
Eq. 83 substituted into Eq. 82 gives
ν3sgs = (CS∆)4ε = (CS∆)4νsgs(2sijsij)
⇒ νsgs = (CS∆)2|s||s| = (2sijsij)
1/2
(84)
Derivation of the Smagorinsky constant
In the inertial subrange production and dissipation are, asmentioned above, in balance, and using Eq. 84 in Eq. 83gives
ε = (CS∆)2|s|3 (85)
Let’s compute |s|2 in the Kolmogorov −5/3 range, where theturbulence is isotropic and homogeneous. We can write
|s|2 = 2sijsij =∂ui
∂xj
∂ui
∂xj
= − ∂2Qi,i
∂rj∂rj
∣∣∣∣r=0
(86)
where the first line is valid because the turbulence is isotropic,and the second line is due to that the turbulence is homo-geneous (see derivation in Lecture Notes on RSMwww.tfd.chalmers.se/doct/comp turb model/). Thegeneral two-point correlation Qi,j of ui and uj can be ex-pressed by the energy spectrum tensor as (Hinze, 1975,
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 50
Chapter 3) (cf. Eq. 73)
Qi,j(r) =
∫ ∞
0
Ei,j(κ) exp(ıκmrm)dκ1dκ2dκ3 (87)
Taking the trace and derivating twice gives∂2Qi,i
∂rj∂rj= −
∫ ∞
0
κ2Ei,i(κ) exp(ıκmrm)dκ1dκ2dκ3 (88)
Integrating over a spherical shell yields∂2Qi,i
∂rj∂rj= −4π
∫ ∞
0
κ4Ei,i(κ)sin(κr)
κrdκ (89)
The three-dimensional spectrum E(κ) is defined as
E(κ) = 2πκ2Ei,i(κ) (90)
Using Eqs. 86, 89 & 90 and letting r → 0 gives (note thatE(κ) is equal to the square of the Fourier coefficient, i.e.E(κ) = ˆu2(κ))
|s|2 = 2
∫ ∞
0
κ2E(κ)dκ
This is the filtered spectrum. Introduce the filtering func-tion G for the cut-off filter (Eq. 75) so that
|s|2 = 2
∫ ∞
0
κ2G2(κ)E(κ)dκ
where Eq. 74 was used. Using Kolmogorov spectrum E(κ) =Cκ−5/3ε2/3 and a cut-off filter (see Eq. 75) we get
|s|2 = 2
∫ κc
0
κ2Cκ−5/3ε2/3dκ =3
2π4/3Cε2/3∆−4/3 (91)
Inserting this in Eq. 85 gives
ε = (CS∆)2
(3
2C
)3/2
π2ε∆−2
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 51
and finally we get
CS =1
π
(2
3C
)3/4
= 0.17 (92)
with the standard value on the Kolmogorov constant C =
1.5.
SGS kinetic energy
The SGS kinetic energy ksgs can be estimated from the Kol-mogorov −5/3 law. The total turbulent kinetic energy isobtained from the energy spectrum as
k =
∫ ∞
0
E(κ)dκ
Changing the lower integration limit to wavenumbers largerthan cut-off (i.e. κc) gives the SGS kinetic energy
ksgs =
∫ ∞
κc
E(κ)dκ
The Kolmogorov −5/3 law now gives
ksgs =
∫ ∞
κc
Cκ−5/3ε2/3dκ
(Note that for these high wavenumbers, the Kolmogorovspectrum ought to be replaced by the Kolmogorov-Pau spec-trum in which an exponential decaying function is addedfor high wavenumbers (Hinze, 1975, Chapter 3)). Carryingout the integration and replacing κc with π/∆ we get
ksgs =3
2C
(∆ε
π
)2/3
(93)
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 52
LES vs. RANS
LES can handle many flows which RANS (Reynolds AveragedNavier Stokes) cannot; the reason is that in LES large, tur-bulent scales are resolved. Examples are:
o Flows with large separation
o Bluff-body flows (e.g. flow around a car); the wake of-ten includes large, unsteady, turbulent structures
o Transition
•In RANS all turbulent scales are modelled⇒ inaccurate
•In LES only small, isotropic turbulent scales are mod-elled ⇒ accurate
LES is very much more expensive than RANS.
The dynamic model
In this model of Germano et al. (1991) the constant C is notarbitrarily chosen (or optimized), but it is computed.
If we apply two filters to Navier-Stokes [grid filter anda second, coarser filter (test filter, denoted by ︷︷. )] where︷︷∆ = 2∆ we get
∂︷︷u i
∂t+
∂
∂xj
(︷︷u i
︷︷u j
)= −1
ρ
∂︷︷p
∂xi+ ν
∂2︷︷u i
∂xj∂xj− ∂Tij
∂xj(94)
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 53
where the subgrid stresses on the test level now are givenby
Tij =︷ ︷uiuj −
︷︷u i
︷︷u j (95)
If we apply the second filter to the grid-filtered equations(Eq. 68) we obtain
∂︷︷u i
∂t+
∂
∂xj
(︷︷u i
︷︷u j
)= −1
ρ
∂︷︷p
∂xi+ ν
∂2︷︷u i
∂xj∂xj− ∂
︷︷τ ij
∂xj
− ∂
∂xj
(︷ ︷uiuj −
︷︷u i
︷︷u j
) (96)
Identification of Eqs. 94 and 96 gives︷ ︷uiuj −
︷︷u i
︷︷u j +
︷︷τ ij = Tij (97)
The dynamic Leonard stresses are now defined as
Lij ≡︷ ︷uiuj −
︷︷u i
︷︷u j = Tij −
︷︷τ ij (98)
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 54
PSfrag replacementsu , u
x
II + 1I − 1
x
xA
B∆x
III
IIIκ
E(κ)
cut-off
I
II
III
κ
E(κ)
cut-off, grid filtertest filter
κc = π/∆κ = π/︷︷∆
In the energy spectrum, the test filter is located at lowerwave number than the grid filter, see the figure above.
The test filter
The test filter is twice the size of the grid filter, i.e.︷︷∆ = 2∆.
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 55
EW P
PSfrag replacementsu , u
x
II + 1I − 1
xxA
B∆x
III
IIIκ
E(κ)
cut-offI
IIIIIκ
E(κ)
cut-off, grid filtertest filterκc = π/∆
κ = π/︷︷∆
∆x ∆x
grid filter
test filter
The test-filtered variables are computed by integrationover the test filter. For example, in the 1D example above︷︷u is computed as (
︷ ︷∆x = 2∆x)
︷︷u =
1
2∆x
∫ E
W
udx =1
2∆x
(∫ P
W
udx +
∫ E
P
udx
)
=1
2∆x(uw∆x + ue∆x) =
1
2
(uW + uP
2+
uP + uE
2
)
=1
4(uW + 2uP + uE)
(99)
For 3D, filtering at the test level is carried out in thesame way by integrating over the test cell assuming linearvariation of the variables (Zang et al., 1993), i.e. (see figurebelow)
︷︷u I,J,K =
1
8(uI−1/2,J−1/2,K−1/2 + uI+1/2,J−1/2,K−1/2
+uI−1/2,J+1/2,K−1/2 + uI+1/2,J+1/2,K−1/2
+uI−1/2,J−1/2,K+1/2 + uI+1/2,J−1/2,K+1/2
+uI−1/2,J+1/2,K+1/2 + uI+1/2,J+1/2,K+1/2)
(100)
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 56
o
o
o o
o
o
PSfrag replacementsu , u
x
II + 1I − 1
x
xA
B∆x
III
IIIκ
E(κ)
cut-offI
IIIIIκ
E(κ)
cut-off, grid filtertest filterκc = π/∆
κ = π/︷︷∆
∆x∆x
grid filtertest filter
I, J − 1, K
I, J + 1, K
I, J, KI − 1, J, K I + 1, J, K
x
y
z
Stresses on grid, test and intermediate level
The stresses on the grid level, test level and intermediatelevel (dynamic Leonard stresses) have the form
τij = uiuj − uiuj stresseswith ` < ∆
Tij =︷ ︷uiuj −
︷︷u i
︷︷u j stresseswith ` <
︷︷∆
Lij = Tij −︷︷τ ij stresseswith ∆ < ` <
︷︷∆
Thus the dynamic Leonard stresses represent the con-tribution to the stresses with scales ` in the range between∆ and
︷︷∆.
Assume now that the same functional form for the sub-grid stresses that is used at the grid level (τij) also can beused at the test filter level (Tij). If we use the Smagorinskymodel we get
τij −1
3δijτkk = −2C∆2|s|sij (101)
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 57
Tij −1
3δijTkk = −2C
︷︷∆
2
|︷︷s |︷︷s ij (102)
where︷︷s ij =
1
2
(∂︷︷u i
∂xj+
∂︷︷u j
∂xi
), |︷︷s | =
(2︷︷s ij
︷︷s ij
)1/2
Applying the test filter to Eq. 101 (assuming that C variesslowly), substituting this equation and Eq. 102 into Eq. 98gives
Lij −1
3δijLkk = −2C
(︷︷∆
2
|︷︷s |︷︷s ij − ∆2
︷ ︷|s|sij
)(103)
Note that the “constant” C really is a function of both spaceand time, i.e. C = C(xi, t).
Equation 103 is a tensor equation, and we have five (sij
is symmetric and trace-less) equations for C. Lilly (1992)suggested to satisfy Eq. 103 in a least-square sense, defin-ing the error Q as the difference between the left-hand sideand the right-hand side of Eq. 103 raised to the power oftwo, i.e.
Q =
(Lij −
1
3δijLkk + 2CMij
)2
Mij =
(︷︷∆
2
|︷︷s |︷︷s ij − ∆2
︷ ︷|s|sij
)
and requiring ∂Q/∂C = 0, which gives
C = − LijMij
2MijMij(104)
It turns out the the dynamic coefficient C fluctuates wildlyboth in space and time. This causes numerical problems,
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 58
and it has been found necessary to average C in homoge-neous direction(s). Furthermore, C must be clipped to en-sure that the total viscosity stays positive (ν + νsgs ≥ 0).
In real 3D flows, there is no homogeneous direction. Thismakes it very difficult (read: impossible) to use this model,without introducing some arbitrary averaging and clipping.
Use of one-equation models solve these numerical prob-lems (see p. 66).
Scale-similarity Models
In the models presented in the previous sections (the Smagorin-sky and the dynamic models) the total SGS stress τij =
uiuj − uiuj was modelled with an eddy-viscosity hypothe-sis. In scale-similarity models the total stress is split upas
τij = uiuj − uiuj = (ui + u′′i )(uj + u′′
j ) − uiuj
= uiuj + uiu′′j + uju′′
i + u′′i u
′′j − uiuj
= (uiuj − uiuj) +[uiu′′
j + uju′′i
]+ u′′
i u′′j
where the term in brackets is denoted the Leonard stresses,the term in square brackets is denoted cross terms, and thelast term is denoted the Reynolds SGS stress. Thus
τij = Lij + Cij + Rij
Lij = uiuj − uiuj
Cij = uiu′′j + uju′′
i
Rij = u′′i u
′′j .
(105)
Note that the Leonard stresses Lij are computable, i.e. theyare exact and don’t need to be modelled.
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 59
In scale-similarity models the main idea is that the tur-bulent scales just below (smaller than) ∆ are similar to theones just above ∆ (hence the word ”scale-similar”). Lookingat Eq. 105 it seems natural to assume that the cross term isresponsible for the interaction between resolved scales (ui)and modelled scales (u′′
i ), since Cij includes both scales.
The Bardina Model
In the Bardina model the Leonard stresses Lij are com-puted explicitly, and the sum of the cross term Cij andthe Reynolds term is modelled as (Bardina et al., 1980;Speziale, 1985)
CMij = cr(uiuj − uiuj) (106)
and Rij = 0 (superscript M denotes Modelled). It was foundthat this model was not sufficiently dissipative, and thus aSmagorinsky model was added
CMij = cr(uiuj − uiuj)
RMij = −2CS∆2|s|sij
(107)
Galilean invariance
Speziale (1985) found that the Leonard term Lij and thecross term Cij are not Galilean invariant by themselves,but only the sum Lij + Cij is. As a consequence, if thecross term is neglected, the Leonard stresses must not becomputed explicitly, because then the modelled momentumequations do not satisfy Galilean invariance.
Below we repeat some of the details of the derivationgiven in Speziale (1985). Galilean invariance means that
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 60
the equations do not change if the coordinate system ismoving with a constant speed Vk. Let’s denote the movingcoordinate system by ∗, i.e.
x∗k = xk + Vkt, t∗ = t, u∗
k = uk + Vk (108)
By differentiating a variable φ we get
∂φ
∂xk=
∂x∗j
∂xk
∂φ
∂x∗j
+∂t∗
∂xk
∂φ
∂t∗=
∂φ
∂x∗k
∂φ
∂t=
∂x∗k
∂t
∂φ
∂x∗k
+∂t∗
∂t
∂φ
∂t∗= Vk
∂φ
∂x∗k
+∂φ
∂t∗.
(109)
From Eq. 109 is it easy to show that the Navier-Stokes(both with and without filter) is Galilean invariant (Speziale,1985; Panton, 1984). Transforming the material derivativefrom the (t, xi)-ccordinate system to the (t∗, x∗
i )-ccordinatesystem gives
∂φ
∂t+ uk
∂φ
∂xk=
∂φ
∂t∗+ Vk
∂φ
∂x∗k
+ (u∗k − Vk)
∂φ
∂x∗k
=∂φ
∂t∗+ u∗
k
∂φ
∂x∗k
,
as it should.
Now, let’s look at the Leonard term and the cross term.Since the filtering operation is Galilean invariant (Speziale,1985), we have u∗
k = uk + Vk and consequently also u′′∗k = u′′
k.For the Leonard and the cross term we get (note that since
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 61
Vi is constant Vi = Vi = Vi)
L∗ij = u∗
i u∗j − u∗
i u∗j = (ui + Vi)(uj + Vj) − (ui + Vi)(uj + Vj)
= uiuj + uiVj + ujVi − uiuj − uiVj − Viuj
= uiuj − uiuj + Vj(ui − ui) + Vi(uj − uj)
= Lij − Vju′′i − Viu′′
j
C∗ij = u∗
iu′′∗j + u∗
ju′′∗i = (ui + Vi)u
′′j + (uj + Vj)u
′′i =
= uiu′′j + u′′
jVi + uju′′i + u′′
i Vj = Cij + u′′jVi + u′′
i Vj
(110)
From Eq. 110 we find that the Leonard term and the crossterm are different in the two coordinate systems, and thusthe terms are not Galilean invariant. However, note thatthe sum is, i.e.
L∗ij + C∗
ij = Lij + Cij. (111)
The requirement for the Bardina model to be Galileaninvariant is that the constant must be one, cr = 1 (seeEq. 107). This is shown by transforming both the exactCij (Eq. 105) and the modelled one, CM
ij (i.e. Eq. 106). Theexact form of Cij transforms as in Eq. 110. The Bardinaterm transforms as
C∗Mij = cr(u
∗i u
∗j − u
∗i u
∗j)
= cr
[(ui + Vi)(uj + Vj) − (ui + Vi)(uj + Vj)
]
= cr [uiuj − uiuj − (ui − ui)Vj − (uj − uj)Vi]
= CMij + cr
[u′′
iVj + u′′jVi
].
(112)
As is seen, C∗Mij 6= CM
ij , but here this does not matter, be-cause provided cr = 1 the modelled stress CM
ij transformsin the same way as the exact one Cij. Thus, as for the exact
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 62
stress Cij (see Eq. 111), we have C∗Mij +L∗
ij = CMij +Lij. Note
that in order to make the Bardina model Galilean invariantthe Leonard stress must be computed explicitly.
Redefined terms in the Bardina Model
The stresses in the Bardina model can be redefined to makeit Galilean invariant for any value cr. A modified Leonardstress tensor Lm
ij is defined as (Germano, 1986)τmij = τij = Cm
ij + Lmij + Rm
ij
Lmij = cr (uiuj − uiuj)
Cmij = 0
Rmij = Rij = u′′
i u′′j
(113)
Note that the modified Leonard stresses is the same as the“unmodified” one plus the modelled cross term Cij in theBardina model with cr = 1 (right-hand side of Eq. 106), i.e.
Lmij = Lij + CM
ij
In order to make the model sufficiently dissipative a Smagorin-sky model is added, and the total SGS stress τij is modelledas
τij = uiuj − uiuj − 2C∆|s|sij (114)
Below we verify that the modified Leonard stress is Galileaninvariant.
1
crLm∗
ij = u∗i u
∗j − u∗
i u∗j = (ui + Vi)(uj + Vj) − (ui + Vi) (uj + Vj)
= uiuj + uiVj + ujVi − uiuj − uiVj − Viuj
= uiuj − uiuj =1
crLm
ij
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 63
(115)
Numerical method
A numerical method based on an implicit, finite volumemethod with collocated grid arrangement, central differ-encing in space, and Crank-Nicolson (α = 0.5) in time isbriefly described below. The discretized momentum equa-tions read
un+1/2
i = uni + ∆tH
(un, u
n+1/2
i
)
−α∆t∂pn+1/2
∂xi− (1 − α)∆t
∂pn
∂xi
(116)
where H includes convective, viscous and SGS terms. InSIMPLE notation this equation reads
aP un+1/2
i =∑
nb
anbun+1/2 + SU − α∆t
∂pn+1/2
∂xi∆V
where SU includes all source terms except the implicit pres-sure. The face velocities u
n+1/2
f = 0.5(un+1/2
j + un+1/2
j−1 ) do notsatisfy continuity. Create an intermediate velocity field bysubtracting the implicit pressure gradient from Eq. 116, i.e.
u∗i = un
i + ∆tH(un, u
n+1/2
i
)− (1 − α)∆t
∂pn
∂xi
⇒ u∗i = u
n+1/2
i + α∆t∂pn+1/2
∂xi
(117)
Take the divergence of this equation and require that ∂un+1/2
f,i /∂xi =0 so that
∂2pn+1
∂xi∂xi=
1
∆tα
∂u∗f,i
∂xi(118)
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 64
The Poisson equation for pn+1 is solved with an efficientmultigrid method (Emvin, 1997). In the 3D MG we usean plane-by-plane 2D MG. The face velocities are correctedas
un+1
f,i = u∗f,i − α∆t
∂pn+1
∂xi(119)
A few iterations (typically two) solving the momentum equa-tions and the Poisson pressure equation are required eachtime step to obtain convergence. More details can be foundDavidson & Peng (2003)
1. Solve the discretized filtered Navier-Stokes equationfor u, v and w.
2. Create an intermediate velocity field u∗i from Eq. 117.
3. The Poisson equation (Eq. 118) is solved with an effi-cient multigrid method (Emvin, 1997).
4. Compute the face velocities (which satisfy continu-ity) from the pressure and the intermediate velocity fromEq. 119
5. Step 1 to 4 is performed till convergence (normallytwo or three iterations) is reached.
6. The turbulent viscosity is computed.
7. Next time step.
Since the Poisson solver is a nested MG solver, it is dif-ficult to parallelize with PVM. Hence, when we do largesimulations (> 20M cells) we use a traditional SIMPLEmethod.
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 65
SIMPLE solver on Linux clusters
CALC-PVM: Pressure correction code (SIMPLE) code par-allelized based on domain decomposition (Nilsson, 1997;Nilsson & Davidson, 1998)
Central differencing, Crank-Nicolson
Speed-up on the IBM SP using MPI (Message PassingInterface).
No. of proc. speed-up1 18 832 32
Note that the speed-up is defined as elapsed time to reachconvergence at each time step. This is a flow where the par-allelization is unusually efficient.
One-equation ksgs model
A one-equation model can be used to model the SGS tur-bulent kinetic energy. The equation can be written on thesame form as the RANS k-equation, i.e.
∂ksgs
∂t+
∂
∂xj(ujksgs) =
∂
∂xj
[(ν + νsgs)
∂ksgs
∂xj
]+ Pksgs
− Cεk
3/2sgs
∆
νsgs = ck∆k1/2sgs , Pksgs
= 2νsgssij sij
(120)
Note that the production term, Pksgs, is equivalent to the
SGS dissipation in the equation for the resolved turbulent
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 66
kinetic energy (look at the flow of kinetic energy discussedat the of Davidson & Billson (2006)).
From the Kolmogorov −5/3 law we can obtain an valueof the Cε-coefficient. Using ε = Cεk
3/2sgs/∆ in Eq. 93 gives
ksgs =3
2C
(Cεk
3/2sgs
π
)2/3
(121)
so that Cε = π(3
2C)−3/2 which with C = 1.5 gives Cε = 0.93.
To derive a value on the ck-constant, we use the expres-sion on νsgs in Eq. 120 together with Eqs. 83 and 84
ckk1/2sgs∆|s|2 = ε
Replacing |s|2 with Eq. 91 and ksgs with Eq. 93 gives
ck
(3
2C
(∆ε
π
)2/3)1/2
∆3
2π4/3Cε2/3∆−4/3 = ε
so that ck =(
3
2C)−3/2
/π = 0.094 with C = 1.5.
A dynamic one-equation model
One of the drawbacks of the dynamic model of Germanoet al. (1991) (see p. 52) is the numerical instability associ-ated with the negative values and large variation of the C
coefficient. Usually this problem is fixed by averaging thecoefficient in some homogeneous flow direction. However,in real applications, no such flow direction exists. Below adynamic one-equation model is presented. The main objectwhen developing this model was that it should be applica-ble to real industrial flows. Furthermore, being a dynamic
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 67
model, it has the great advantage that the coefficients arecomputed rather than being prescribed.
The equation for the subgrid kinetic energy reads (David-son, 1997b,c) (see also Sohankar et al. (2000b,a))
∂ksgs
∂t+
∂
∂xj(ujksgs) = Pksgs
+∂
∂xj
(νeff
∂ksgs
∂xj
)− C∗
k3/2sgs
∆
Pksgs= −τ a
ijui,j, τaij = −2C∆k
1
2
sgssij
(122)
with νeff = ν + 2Chom∆k1
2
sgs. The C in the production termPksgs
is computed dynamically (cf. Eq. 104). To ensure nu-merical stability, a a constant value (in space) of C (Chom) isused in the diffusion term in Eq. 122 and in the momentumequations. Chom is computed by requiring that Chom shouldyield the same total production of ksgs as C, i.e.
〈2C∆k1
2
sgssijsij〉xyz = 2Chom〈∆k1
2
sgssijsij〉xyz
The dissipation term εksgsis estimated as:
εksgs≡ νTf(ui,j, ui,j) = C∗
k3/2sgs
∆. (123)
Now we want to find a dynamic equation for C∗. The equa-tions for ksgs and K read in symbolic form
T (ksgs) ≡ Cksgs− Dksgs
= Pksgs− C∗
k3/2sgs
∆
T (K) ≡ CK − DK = PK − C∗K3/2
︷︷∆
(124)
Since the turbulence on both the grid level and the testlevel should be in local equilibrium (in the inertial −5/3
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 68
region), the left-hand side of the two equations in Eq. 124should be close to zero. An even better approximation shouldbe to assume T (ksgs) = T (K), i.e.
︷︷P ksgs
− 1
∆
︷ ︷C∗ksgs
3/2
= PK − C∗K3/2
︷︷∆
,
so that
Cn+1∗ =
(PK −
︷︷P ksgs
+1
∆
︷ ︷Cn
∗ k3/2sgs
) ︷︷∆
K3
2
. (125)
The idea is to put the local dynamic coefficients in the sourceterms, i.e. in the production and the dissipation terms ofthe ksgs equation (Eq. 122). In this way the dynamic coef-ficients C and C∗ don’t need to be clipped or averaged inany way. This is a big advantage compared to the standarddynamic model of Germano (see discussion on p. 57).
A Mixed Model Based on a One-Eq. Model
Recently a new dynamic scale-similarity model was pre-sented by Krajnovic & Davidson (2002b). In this model adynamic one-equation SGS model is solved, and the scale-similarity part is estimated in a similar way as in Eq. 114.
Applied LES
At the Department we used LES for applied flows suchas flow around a cube (Krajnovic & Davidson, 2002a; Kra-jnovic, 2002), the flow and heat transfer in a square rotat-ing duct Pallares & Davidson (2000, 2002), the flow arounda simplified bus (Krajnovic & Davidson, 2003; Krajnovic,
Large Eddy Simulations

Lars Davidson: MTF270 Turbulence Modellinghttp://www.tfd.chalmers.se/doct/comp turb model 69
2002), a simplified car (Krajnovic & Davidson, 2005a,b,c)and the flow around an airfoil Dahlstrom & Davidson (2003);Dahlstrom (2003). We have also done some work on buoyancy-affected flows Peng & Davidson (2002, 2001); Peng (1998).
Large Eddy Simulations