MS Predavanje5
22
Upravljanje dinamikom vozila Jadranko Matuˇ sko Fetah Koloni´ c Fakultet elektrotehnike i raˇ cunarstva 05. studenog 2014
description
l
Transcript of MS Predavanje5

Upravljanje dinamikom vozila
2009.09.12 14:38Unizg-logo-lat.svg
Page 1 of 1file:///Users/jmatusko/Documents/Unizg-logo-lat.svg
Jadranko MatuskoFetah Kolonic
Fakultet elektrotehnike i racunarstva
05. studenog 2014

Predavanje:Upravljanje dinamikom vozila
Model longitudinalnog gibanja automobila
mg
Fxf
Rxr
Rxf
Faero
x
Fxr θ
• Prema II zakonu mehanike vrijedi:
mx = Fxf + Fxr − Faero − Rxf − Rxr − mg sin(θ). (1)
pri cemu su: m - masa automobila, Fxf - sila trenja izmedu prednjihkotaca i podloge, Fxr - sila trenja izmedu straznjih kotaca i podloge,Faero - sila otpora zraka, Rxf - sila otpora kotrljanja prednjih kotaca, Rxr- sila otpora kotrljanja straznjih kotaca, θ - nagib ceste
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 2 od 22

Predavanje:Upravljanje dinamikom vozila
Sila otpora zraka
• Opisana je sljedecom empirijskom relacijom:
Faero =12ρCdAf (vx + vw)2, (2)
pri cemu je:ρ - gustoca zraka;Cd - koeficijent aerodinamickg otpora;Af - aktivna povrsina prednje strane vezila (cca 79-83% od W · h);vx - brzina vozila;vw - brzina vjetra;
• Iznos koeficijenta aerodinamickog otpora moze se izracunati izjednostavnog eksperimenta slobodnog zaustavljanja vozila.
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 3 od 22

Predavanje:Upravljanje dinamikom vozila
Sila trenja
• Sila trenja izmedu kotaca i podloge ovisi o: iznosu klizanja; normalnoj sili; koeficijentu trenja izmedu kotaca i podloge.
• Klizanje predstavlja bezdimenzionalnu velicinu koja se definira nasljedeci nacin: Za slucaj ubrzavanja:
σx =rωx − vx
rωx, (3)
Za slucaj usporavanja:
σx =rωx − vx
vr, (4)
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 4 od 22

Predavanje:Upravljanje dinamikom vozila
Sila trenja (2)
• Tipican oblik ovisnosti trenja o klizanju prikazana je na slici 1
Ftr
σx0.1 0.2 0.3−0.3 −0.2 −0.1
Slika 1: Tipicna ovisnost sile trenja o iznosu klizanja
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 5 od 22

Predavanje:Upravljanje dinamikom vozila
Sila trenja (3)
• Prema 1 razvidno je da za male iznose klizanja (σx < 0.2) ovisnostizmedu sile trenja i klizanja je priblizno linearna, te se sile trenja naprednjim i zadnjim kotacima daju opisati izrazom:
Fxf = Cσfσxf , (5)
Fxr = Cσrσxr, (6)
gdje su Cσf i Cσr koeficijenti longitudinalne cvrsoce gume.• Za vece iznose klizanja σx potrebno je koristiti nelinearni model trenja
dan Pacejkinim modelom (Magicna formula).
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 6 od 22

Predavanje:Upravljanje dinamikom vozila
Asimetricna razdioba opterecenja na kontaktnojpovrsini
∆x
Fz
Slika 2: Asimetricna razdiobaopterecenja u kontaktnoj povrsini kotacai podloge
• Prilikom rotacije kotacanormalna sila nije simetricnoraspodijeljena po kontaktnojpovrsini izmedu kotaca i podloge(Slika 2)
• Zbog ovakve razdiobe javlja seotpor kotljanju cije je egzaktnomodeliranje izrazito slozeno te seobicno pojednostavljeniheuristicki model:
Rxf + Rxr = f · (Fzf + Fzr). (7)
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 7 od 22

Predavanje:Upravljanje dinamikom vozila
Odredivanje normalne sile
Fzr
Fzf
Faero
haero
Rxf
RxrFxr
Fxf
lf
lr
h
mg
mx
θ
Slika 3: Vektorski dijagram sila koje djeluju na automobil
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 8 od 22

Predavanje:Upravljanje dinamikom vozila
Odredivanje normalne sile (2)• Ravnoteza momenata oko osi koja prolazi kroz dodirnu liniju
straznjeg kotaca i podloge:
Fzf (lf + lr) + Faerohaero + mxh + mgh sin (θ) − mglr cos (θ) = 0, (8)
odakle slijedi:
Fzf =−Faerohaero − mxh − mgh sin (θ) + mglr cos (θ)
lf + lr(9)
• Slicno, ravnoteza momenata oko osi kroz dodirnu liniju prednjegkotaca i podloge glasi:
Fzr(lf + lr) − Faerohaero − mxh − mgh sin (θ) − mglf cos (θ) = 0, (10)
odakle slijedi:
Fzr =Faerohaero + mxh + mgh sin (θ) + mglf cos (θ)
lf + lr. (11)
• Razvidno je da tijekom ubrzavanja opterecenja na prednje kotaceopada a na straznje raste!
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 9 od 22

Predavanje:Upravljanje dinamikom vozila
Prijenos pogonske snage na kotace
• Sustav prijenosa pogonske snage motora na kotace, kao i prijenosopterecenja s kotaca prema motoru sastoji se od nekoliko podsustava: Pogonski stroj (motor s unutarnjim sagorjevanjem ili elektricni motor), koji
sluzi za pretvorbu kemijske (toplinske) odnosno elektricne energije umehanicku.
Pretvarac momenta, preuzima ulogu spojke kod vozila s automatskimprijenosom upravljajuci prijenosom pogonskog momenta motora premakotacima.
Prijenosni podsustav, koji koristeci vise stupnjeva prijenosa prilagodavapogonski moment i brzinu.
Kotaci, koji obavljaju pretvorbu iz rotacijskog u translacijsko gibanje.
Motor Pretvarač momenta Prijenos Kotači
Slika 4: Prijenos pogonske snage na kotace
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 10 od 22

Predavanje:Upravljanje dinamikom vozila
Dinamika prijenosa
• Sustav prijenosa od kljucne je vaznosti za za prijenos razvijenogmomenta motora na kotace.
• Takav se sustav obicno sastoji od 5 ili 6 stupnjeva sa razlicitimprijenosnim omjerima.
• Opcenito prijenosni omjer ima iznos manji od 1, tj. R < 1.• Moment prenesen na osovinu kotaca odreden je u stacionaom stanje
relacijom:
Tw =1R
Te, (12)
pri cemu je Te moment motora.• Istovremeno brzina motora i brzina kotaca vezane su izrazom:
ωw = Rωe, (13)
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 11 od 22

Predavanje:Upravljanje dinamikom vozila
Dinamika pogona
• Dinamika pogona opisana je temeljen drugog Newtonog zakonasljedecim izrazom:
JeΩe = Ti − Tf = Te, (14)
pri cemu je Ti moment razvijen u idealnom slucaju bez gubitaka, Tfpedstavlja moment gubitaka (npr. trenje), dok Te predstavlja momentna osovini motora, tj. na ulazu u sustav prijenosa.
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 12 od 22

Predavanje:Upravljanje dinamikom vozila
Dinamika kotaca
• Moment na izlazu iz sustava prijenosa predstavlja pogonski momentna osovini kotaca, cije je gibanje opisano izrazom:
Jwωwf = Tw − rFxf , (15)
pri cemu je Jw moment tromosti kotaca, r polumjer kotaca i ωwf kutnabrzina prednjih kotaca.
• S druge, strane dinamika straznjih (nepogonskih) kotaca odredena jeizrazom:
Jwωwr = −rFxr. (16)
• Ukupna longitudinalna sila predstavlja zbroj sila na prednjim istaznjim kotacima:
Fx = Fxf + Fxr. (17)
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 13 od 22

Predavanje:Upravljanje dinamikom vozila
Sustavi upravljanja longitudinalnom dinamikomvozila
• Pod takvim sustavim podrazumjevaju se susatvi koji upravljajulongitudinalnim gibanjem vozila, bilo njegovim ubrzanjem, bilobrzinom ili udaljenosti do sljedeceg vozila.
• Tipican je primjer takvog sustava tzv. cruise control koji odrzavazeljenu brzinu upravljajuci otvorenoscu elektronicke zaklopke motora(engl. electronic throttle).
• U slucaju da nailaska na sporije vozilo koje se krece u istom smjeruvozac treba reagirati pritiskom na papucicu kocnice cime se kontrolevracaju vozacu.
• Naprednija verzija takvog sustava ukljucuje i upravljanje sustavomkocnica cime se moze u slucaju dostizanja sporijeg automobilausporiti i preci u mod odrzavanje konstantne udaljenosti u odnosu naautomobil ispred.
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 14 od 22

Predavanje:Upravljanje dinamikom vozila
Cruise control
Nadređeni regulator
Podređeni regulator
Slika 5: Strukturaupravljanja kod cruisecontrol-a
• Regulacijski sustav sastoji se od dvije petlje:nadredene petlje po brzini i podredene poubrzanju vozila.
• Sa stajalista projektiranja nadredenogregulatora proces se obicno pretpostavlja uobliku PT1 clana:
x =1
1 + Tsxdes (18)
• Uobicajeno se za upravljanje u nadredenoj petljikoristi koristi PI regulator koristeci pritompovratnu vezu po brzini gibanja:
xdes(t) = kp(vr − vx) + kI
∫ t
0(vref − vx)dt. (19)
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 15 od 22

Predavanje:Upravljanje dinamikom vozila
Cruise control (2)
• Kao povratna informacija moze se, umjesto brzine vozila vx, koristiti i pozicija(odnosno udaljenost o susjednog vozila), te algoritam upravljanja u tomslucaju glasi:
xdes = kp(xdes − x) + kI
∫ t
0(xdes − x)dt. (20)
• U tom se slucaju odrzava zeljena udaljenost od susjednog vozila.• U slucaju upravljanja brzinom proces kojim se upravlja glasi:
Gp(s) =1
s(1 + T1s), (21)
sto uz pretpostavljenu PI strukturu regulatora (GR(s) = kp + KI/s) vodi dosljedece prijenosne funkcije zatvorenog kruga:
vx(s)vref (s)
=Kps + kI
Ts3 + s2 + kps + kI(22)
• Parametri regulatora mogu se odrediti postupkom postavljanja polova (engl.pole placement), pomocu Bodeovih dijagrama ili npr. koristenjem krivuljemjesta korijena.
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 16 od 22

Predavanje:Upravljanje dinamikom vozila
Cruise control (3)Proracun momenta motora prema zeljenom ubzanju
• Kako bi se proracunao potrebni moment motora na temelju izlaza iznadredenog regulatora, tj. zeljenog ubrzanja xdes potrebno je svevelicine svesti na osovinu motora.
• Pritom je bitan utjecaj sustava prijenosa opisanog prijenosnimomjerom R.
• Momenti se na stranu motora preslikavaju s faktorom R, dok semomenti tromosti preslikavaju s faktorom R2.
• Ukupni moment tromosti sveden na stranu motora iznosi:
J∗e = Je + (mr2 + Jw)R2 (23)
• Momentu motora susprostavljaju se momenti momentaerodinamickog otpora te moment otpora kotljanjapomnozeni sfaktorom R:
J∗e ωe = Te − (Rxr + Faeror)R. (24)
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 17 od 22

Predavanje:Upravljanje dinamikom vozila
Cruise control (4)Proracun momenta motora prema zeljenom ubzanju
• S druge strane brzina vozila i brzina motora povezane su izrazom:
x = rRωe, (25)
te se uzevsi u obzir kvadraticnu ovisnost sile aerodinamickog otpora obrzini vozila moze zapisati:
J∗exdes
rR= Te − (RxrR + car3R3ω2
e ). (26)
odakle slijedi:
Te =J∗eRr
xdes + caR3r3ω2e + RrRx (27)
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 18 od 22

Predavanje:Upravljanje dinamikom vozila
Cruise control (5)Projektiranje regulatora podredene petlje
• U ovoj se upravljackoj petlji upravlja otvorenoscu elektricke zaklopkemotora (kut α izmedu 0 i 90).
• Zaklopkom se regulira dotok zraka u komoru za sagorjevanje (aposljedicni i goriva).
• Na temelju zelejnog ubrzanja (izlaz iz nadredenog regulatora)proracunava se potrebni moment na osovini motora prema izrazu(27).
• Veza izmedu otvorenosti zklopke i razvijenog momenta nelinearna jefunkcija:
Te = f(ωe, α), (28)
i obicno je dana tablicno ili u obliku grafa kakva je prikazan nasljedecem slajdu.
• Zaklopka sa prenapregnuta s dvije opruge razlicitih koeficijenatakrutosti i upravlja se istosmjernim elektromotorom.
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 19 od 22

Predavanje:Upravljanje dinamikom vozila
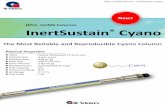
Cruise control (5)Ovisnost kuta zaklopke motora i momenta na osovini motora
Chapter 9
manifold varies and reaches steady state (for each value of a and w e ) are ignored.
An example of an engine map for the net torque Tnet (a,@,) as a function of throttle angle a and engine sped we is shown in Figure 9-6. It can be seen that Tnet increases with throttle angle nonlinearly but monotonically. For each throttle angle, Tnet initially increases with engine speed we , reaches a maximum and then decreases. Thus for each a , there is a engine speed We at which maximum torque is achieved.
-1 00 1 I I I I I I I I J 0 10 20 30 40 50 60 70 80 90
throttle angle (deg)
Figure 9-6. T,,, (a, 13, ) as a function of a for various values of We
Kut elektroničke zaklopke motora
Porast brzine motora
Mom
ent n
a os
ovin
i mot
ora
[Nm
]
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 20 od 22

Predavanje:Upravljanje dinamikom vozila
Sustav kontrole proklizavanja
• Osnovni zadatak ABS sustava jest da upravljanjem tlakom u kocionomsustavu sprijeci blokiranje kotaca tijekom kocenja, te samim timezadrzi upravljivost vozila.
• Najcesce koristeni algoritam ABS-a zasniva se na predefiniranimpragovima ubrzanja, definiraju time podrucja unutar kojih sustav imaneko od 4 moguca djelovanja: PROPUSTANJE - akcija od strane vozaca (razina pritiska na papucicu
kocnice) se u potpunosti propusta, te je tlak u sustavu proporcionalapritisku.
ZADRZAVANJE - tlak u kocionom sustavu ostaje nepromjenjen. SMANJENJE - tlak u kocionom sustavu se smanjuje. POVECANJE - tlak u kocionom sustavu se povecava.
Kao signal na temelju kojeg se obavljaju akcije koristi se signal brzinevrtnje kotaca preracunat na odgovarajucu brzinu vozila (linijskabrzina kotaca):
vR = rωw. (29)
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 21 od 22

Predavanje:Upravljanje dinamikom vozila
Sustav kontrole proklizavanja - ABSAlgoritam
−a1
−a2
Zadržavanje
Propuštanje
Smanjenje
a3
a4
Ubrzavanje
Usporavanje
Smanjenje
Propuštanje
Povećanje
PropuštanjeZadržavanje
Propuštanje
Povećanje
Prvi ciklus
Ost
ali c
iklu
si
Ostali ciklusi
Svi ciklusi
Svi c
iklu
si
Slika 6: Algoritam ABS-a zasnovan na predefiniranim pragovima ubrzanja
J.Matusko & F.Kolonic Mehatronicki sustavi Ak. godina 2014/2015 22 od 22