Moments Of Inertial Of Various Objectsphysics.wisc.edu/undergrads/courses/fall2017/201/... ·...
7
1 Physics 201, Lecture 18 Today’s Topics Rotational Dynamics Torque Exercises and Applications Rolling Motion Hope you have previewed Chapter 10. (really!) Review Angular Velocity And Angular Acceleration Angular Velocity (ω) describes how fast an object rotstes, it has two components: Angular speed: and direction of ω: + counter clockwise - clockwise All particles of the rigid object have the same angular velocity Angular Acceleration (α): and Note: the similarity between (θ,ω,α) and (x, v, a) ω ave ≡ Δθ Δt ω ≡ Δt →0 lim Δθ Δt = dθ dt α ave ≡ Δω Δt α ≡ Δt →0 lim Δω Δt = dω dt Angular velocity ω is a vector! (define direction next page) Angular acceleration α is also a vector! axis Review: Moment of Inertia Moment of Inertia of an object about an axis (unit of I : kgm 2 ) “I” depends on rotation axis, total mass, and mass distribution. ∑ ≡ 2 i i r m I : Inertia of Moment another form : I ≡ r 2 dm whole object ∫ Moments Of Inertial Of Various Objects I = m i r i 2 ∑ (= r 2 dm) ∫
Transcript of Moments Of Inertial Of Various Objectsphysics.wisc.edu/undergrads/courses/fall2017/201/... ·...

1
Physics 201, Lecture 18
Today’s Topics
q Rotational Dynamics
§ Torque q Exercises and Applications
§ Rolling Motion
q Hope you have previewed Chapter 10. (really!)
Review Angular Velocity And Angular Acceleration
q Angular Velocity (ω) describes how fast an object rotstes, it has two components: § Angular speed: and
§ direction of ω: + counter clockwise - clockwise
Ø All particles of the rigid object have the same angular velocity q Angular Acceleration (α):
and
Note: the similarity between (θ,ω,α) and (x, v, a)
ωave ≡ΔθΔt
€
ω ≡Δt→ 0limΔθ
Δt=dθdt
αave ≡ΔωΔt
€
α ≡Δt→ 0limΔω
Δt=dωdt
è Angular velocity ω is a vector! (define direction next page)
è Angular acceleration α is also a vector!
axis Review: Moment of Inertia
q Moment of Inertia of an object about an axis
(unit of I : kgm2)
Ø “I” depends on rotation axis, total mass, and mass distribution.
∑≡ 2iirmI :Inertia ofMoment
€
another form: I ≡ r2dmwhole object∫
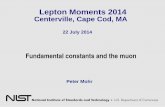
Moments Of Inertial Of Various Objects
€
I = miri2∑ (= r2dm)∫

2
Which Has Larger Moment of Inertia?
q Which of the following configurations has larger I Ø Central or side axis ?
(Trivial) Quick Quiz q A force is acting on a rigid rod around a fixed axis. Ø Which of the follow case(s) will not turn.
Ø Effective Turning: Force, direction, acting point(action length).
F F F
F
Turning counter clockwise
Turning clockwise No Turn No Turn
axis
Torque: Effect of Force on Rotation q Torque:
§ Magnitude: τ = Fsinφ r , depends on F , r, and sinφ § Direction:
• conventional: – clockwise = “-”, – counter-clockwise = “+”
• More strictly: Right Hand Rule for cross-product
q The angular acceleration of an object is proportional to the torque acting on it Στ = I α
I: Moment if inertia (Tuesday)
τ =r ×F
Lever Arm
q τ ≡ Fsinφ r = F d
axis (pivot)
acting point
Lever Arm d = r sinφ
The lever arm, d, is the perpendicular distance from the axis of rotation to a line drawn from the direction of the force

3
Alternative View of Torque q τ ≡ Fsinφ r = F⊥ r
q Only the perpendicular component of the force contributes to the torque
axis (pivot)
acting point
Summary: Two Views of Torque q τ ≡ Fsinφ r = F⊥ r = F r⊥
F⊥ r F r⊥
axis (pivot)
acting point
Torque Has a Direction q Torque is a vector. It has a magnitude and a direction. q For fixed axis rotation, the direction of torque can be described by
a sign (+/-) in one dimension; (and by right hand rule in general)
Ø Convention: Counter-clockwise : +, clockwise - .
τ > 0
τ < 0
τ > 0
τ > 0
The Acting point of Gravity: Center of Gravity
q The force of gravity acting on an object must be considered in determining equilibrium q In finding the torque produced by the force of gravity, all of the weight of the object can be considered to be concentrated at one point called center of gravity (cg) q Effectively, assuming gravitation field is uniform, the CG of an object is the same as its CM (that is usually true at the Phy103 level)
xcg =ΣmixiΣmi
and ycg =ΣmiyiΣmi
See demo: finding CG

4
pivot
L/2
θ
Quick Exercise: Calculating Torque q As shown, a pencil is falling down under gravity. What is the
torque (about the pivot) by the gravity?
q Answer: + Fgrav cosθ L/2 (note: why cosθ?)
Rotational Dynamics
Angular Linear
tαωω += 0atvv += 0
221
00 tt αωθθ ++=2
21
00 attvxx ++=
θαωω Δ+= 220
2 xavv Δ+= 220
2
Iτ
α =mFa =
Στ = I α Rotational Dynamics compared to 1-D Dynamics
KE = 12Iω 2 KE = 1
2mv2
Exercise: Pulley with Mass q A crate of mass mcrate is hanging on a pulley of mass mpulley and
radius Rpulley as shown. What is the acceleration of the crate? Solution: 1: per FBD for the crate T-mcrateg = mcratea 2: for the pulley: τ = -TR = Ipulley α 3: connection: a=αR Solve: a = - mcrateg/(mcrate+Ipulley/Rpulley
2) Get T and α yourself after class
Please make sure you understand this
Combined Translational and Rotational Motion
q Generally, the motion of an extended object is a combination of the translational motion of the CM and the rotation about the CM
KEtot = KEtrans + KErot = ½ MvCM2 + ½ Iω2

5
Combined Translation and Rotation q Combined translational and rotational motion.
Ø At point A (top). vrot = Rω to the right. vtop = vCM + Rω Ø At point B (bottom). vrot = Rω to the left. vbottom = vCM - Rω
Ø At arbitrary point C
CM: moving linearly (1-D)
Everything on the wheel rotation about CM
R
v = vCM +vrot
vCM
A
B
C
vrot
vrot
vCM
v
Rolling/Sliding Conditions q Recall: vbottom = vCM - Rω q Depending relative size of Vcm and Rω, there can be three
classes of rolling /sliding conditions.
vcm
ω
vbottom = vcm - Rω =0 vcm = Rω
vcm
ω
vbottom = vcm – Rω<0 vcm < Rω
vcm
ω
vbottom = vcm – Rω>0 vcm > Rω
“spinning” “pure rolling” (rolling w/o slipping)
“sliding”
“Pure” Rolling Motion (Rolling without Slipping)
q Rolling motion refers to a form of combined translational and rotational motion.
Ø Condition for rolling w/o slipping:
vCM = ωR and aCM = αR
CM: moving linearly (1-D)
wheel: rotation about CM
No slipping on road i.e. vbottom =0
R vCM
Quick Quiz and Demo q Consider a wheel in pure rolling without slipping. After a full
resolution (i.e. in period T), how far the CM moves?
q R, 2R, πR, 2πR, other
See Demo
CM: moving linearly (1-D)
R vCM = Rω=R2π/T ΔxCM =VCM*T =2πR

6
Trajectory of a Point on the Rim of a Pure-Rolling Wheel Quick Quiz: Rolling Without Slipping
q Consider a wheel rolling down a (not smooth) hill without slipping.
How many (external) forces are acting on the wheel? 2, 3, more than 3, other q In the process, the work down by friction is Positive, negative, zero q Now consider a wheel rolling on a (flat but non smooth)
horizontal plane without slipping. How many external forces are acting on it?
2, 3, more than 3, other Why? See next slide
See Demo
fs
mg
N
mg
N
Exercise: Rolling w/o Slipping Down a Slope
q A uniform disc (or wheel, or sphere) of mass M , radius R, and moment of inertia I is rolling down a slope without slipping as shown. Calculate its CM acceleration.
q Solution: Ø Step 1: FBD as shown Ø Step 2: Set up axis as shown Ø Step 3: Dynamics for CM (x direction): mgsinθ – fs = maCM Ø Step 4: Dynamics for rotation: -fsR =- Iα Ø Step 5: rolling w/o slipping: Rα=aCM Ø Solve for unknowns:
fs
mg
N
θ
x
aCM =gsinθ
1+ ImR2
, fs =mgsinθmR2
I+1
Results Discussion: Rolling Down a Slope (w/o slipping)
Consider a wheel rolling down a flat (but not smooth) slope. Ø On a slope, a friction is necessary to keep it from slipping Ø For same mR2, the larger the I, the slower it moves. Ø Spheres (or wheels or discs) of the same shape and mass
distribution roll at the same speed regardless of their size and mass. Ø On a horizontal flat surface, the friction reduces to zero and the
rolling can go forever even when the surface is not smooth!
fs
mg
N
θ
x aCM =gsinθ
1+ ImR2
, fs =mgsinθmR2
I+1

7
Moments Of Inertial Of Various Objects
€
I = miri2∑ (= r2dm)∫
See demo for rolling of wheels with different I
q General Work: W = F · Δs = Fin_direction_of_Δs Δs q For an object rotating about a fixed axis, all mass elements are
moving in the tangential direction : W = Ft Δs = rFt Δs/r = τ Δθ P = W/Δt = τ Δθ/Δt = τω Ø Rotational version of Work-Energy theorem
2212
21
if
rot
IIKEW
ωωθτ −=Δ
Δ=
Work and Power by Torque (Self Reading) Δs
Δs
Δθ




![5. GENERALIZED METHODS OF MOMENTS (GMM)miniahn/ecn726/cn_gmm.pdf · 5. GENERALIZED METHODS OF MOMENTS (GMM) [1] ... • Estimation of V when the wt are autocorrelated over t: ...](https://static.fdocument.org/doc/165x107/5adebd0d7f8b9aa5088e8359/5-generalized-methods-of-moments-gmm-miniahnecn726cngmmpdf5-generalized.jpg)