Modelagem Cinemática de Robôs Industriais · Modelagem Cinemática de Robôs Industriais Mário...
84
Modelagem Cinemática de Robôs Industriais Mário Luiz Tronco Prof. Mário Luiz Tronco Prof. Assoc. Mário Luiz Tronco
Transcript of Modelagem Cinemática de Robôs Industriais · Modelagem Cinemática de Robôs Industriais Mário...
Modelagem Cinemática de Robôs
Industriais
Mário Luiz TroncoProf. Mário Luiz Tronco
Prof. Assoc. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
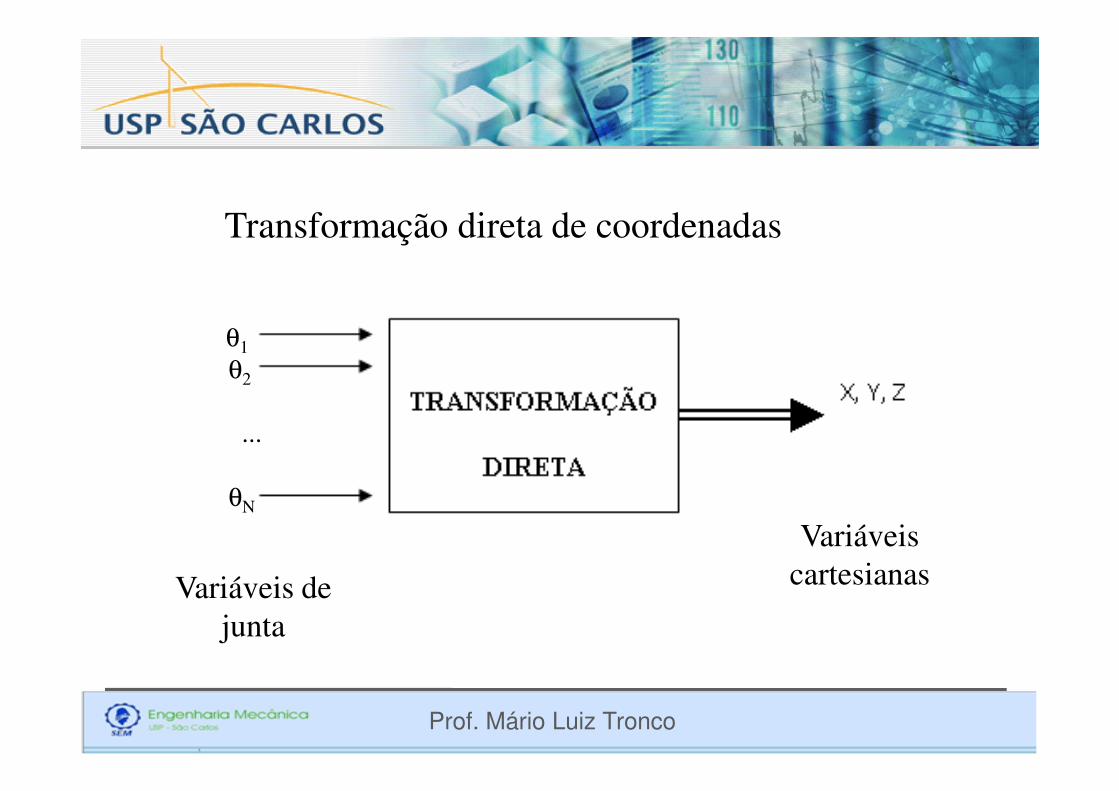
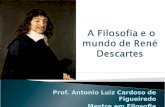
Transformação direta de coordenadas
θ1
θ2
Mário Luiz TroncoProf. Mário Luiz Tronco
...
θN
Variáveis
cartesianasVariáveis de
junta
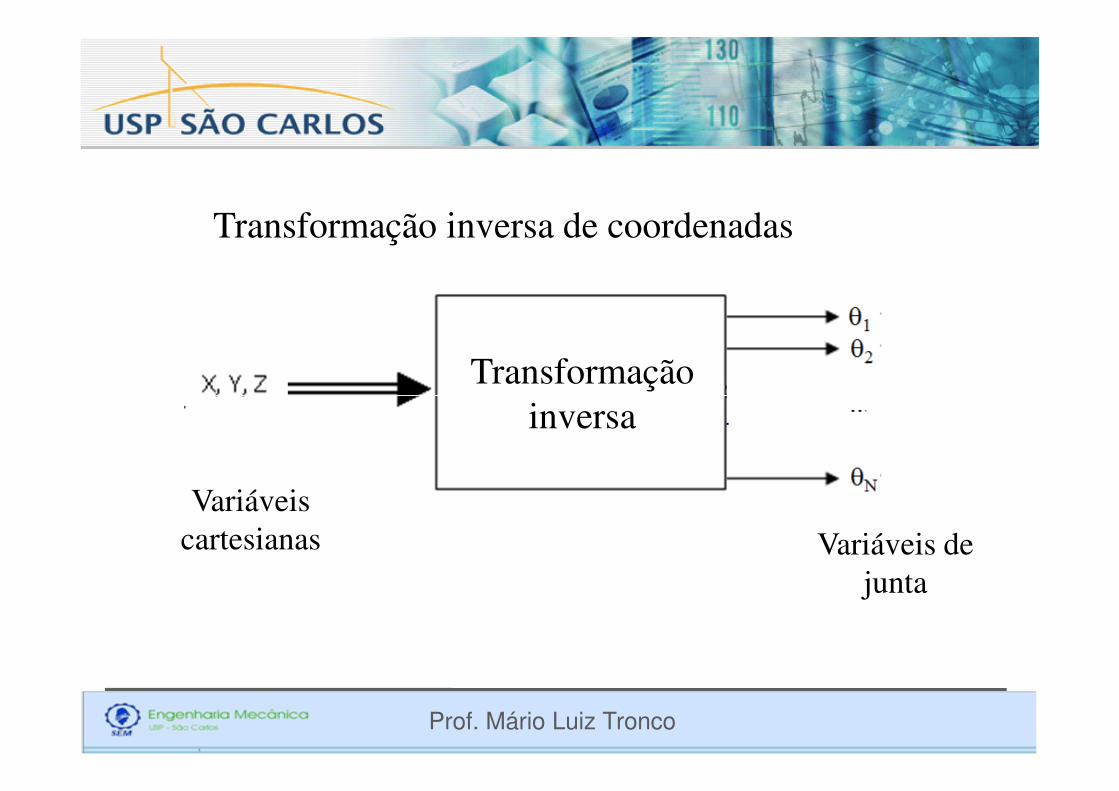
Transformação inversa de coordenadas
Transformação
inversa
Mário Luiz TroncoProf. Mário Luiz Tronco
Variáveis de
junta
inversa
Variáveis
cartesianas
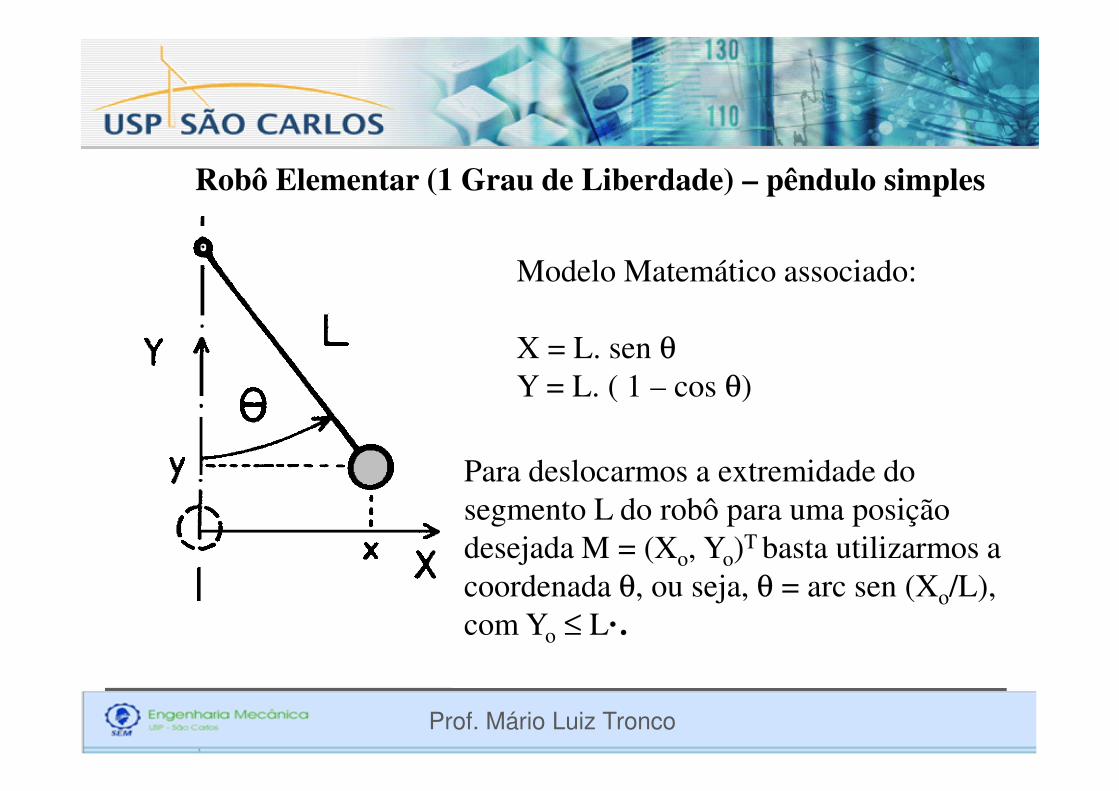
Robô Elementar (1 Grau de Liberdade) – pêndulo simples
Modelo Matemático associado:
X = L. sen θ
Y = L. ( 1 – cos θ)
Mário Luiz TroncoProf. Mário Luiz Tronco
Y = L. ( 1 – cos θ)
Para deslocarmos a extremidade do
segmento L do robô para uma posição
desejada M = (Xo, Yo)T basta utilizarmos a
coordenada θ, ou seja, θ = arc sen (Xo/L),
com Yo ≤ L· .

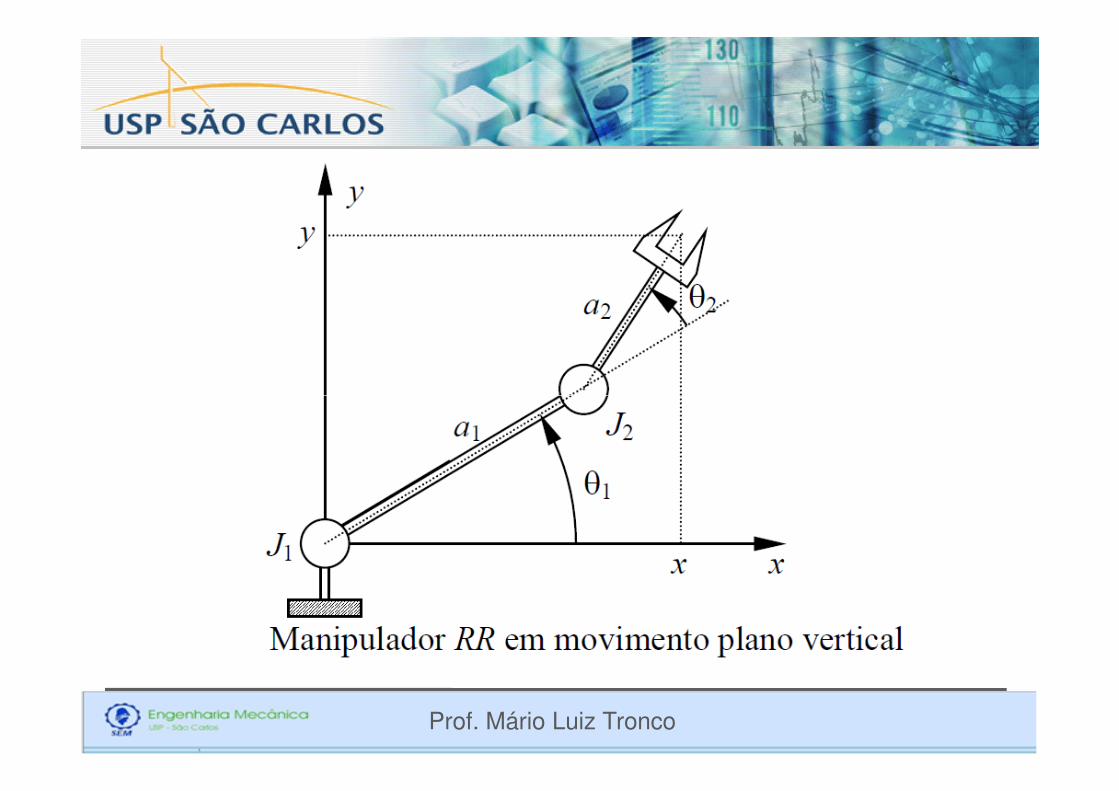
Robô com 2 Graus de Liberdade – pêndulo duplo
Modelo Matemático associado:
X = L1. sen θ1 + L2. sen θ2
Y = L1. (1 – cos θ1 ) + L2. ( 1 – cos θ2 )
Mário Luiz TroncoProf. Mário Luiz Tronco
A transformação inversa de
coordenadas consistirá na definição
de um vetor θ = (θ1, θ2)T, a partir
do posicionamento do robô num
determinado ponto M(Xo,Yo)T, a
partir da obtenção dos valores θ1 e
θ2 expressos em função de Xo e Yo.
Mário Luiz TroncoProf. Mário Luiz Tronco
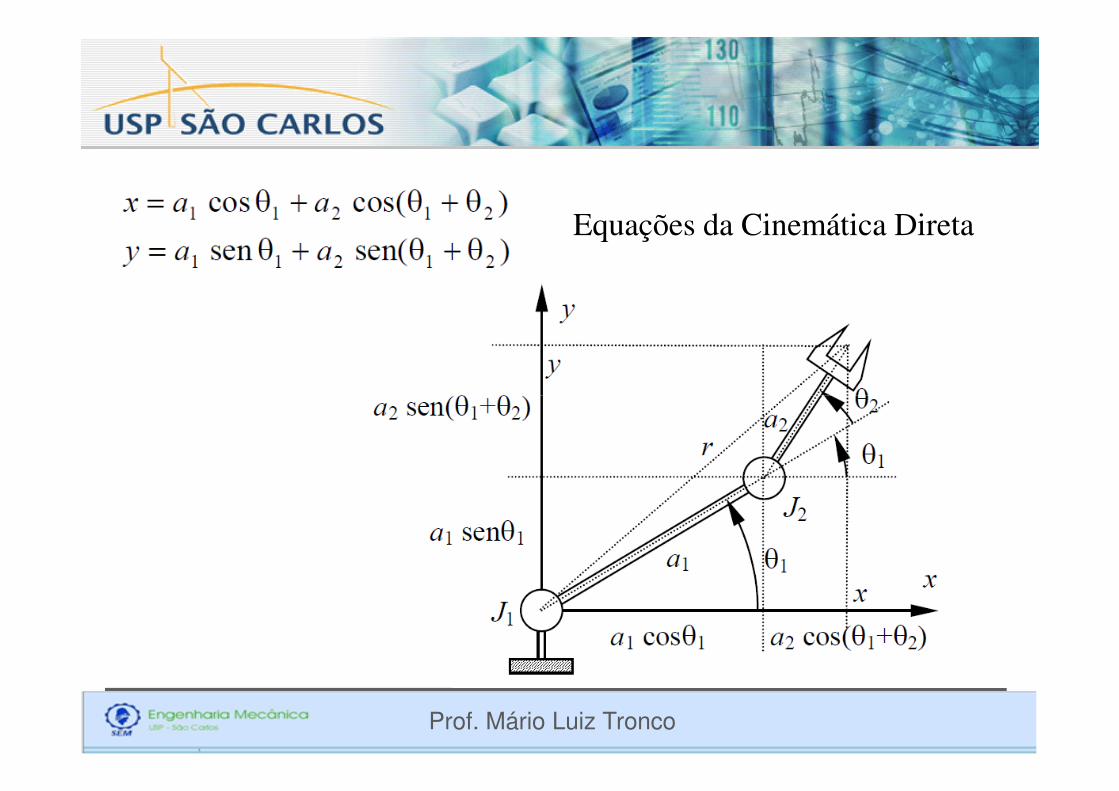
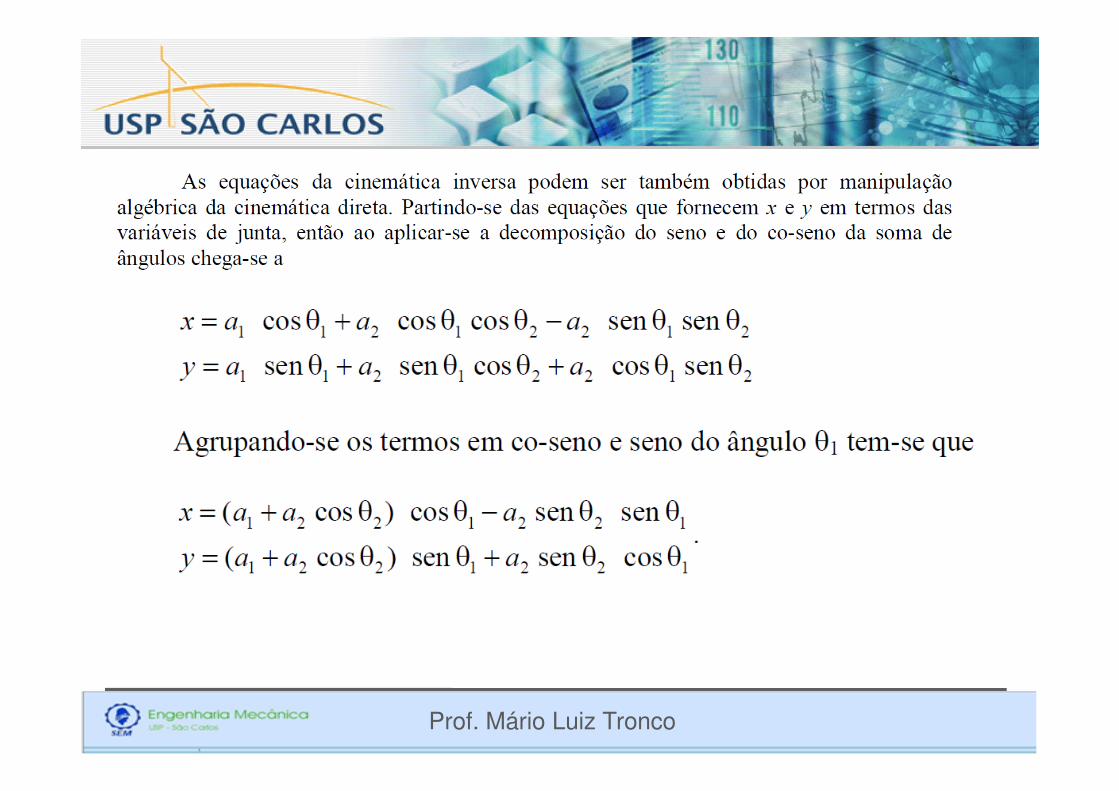
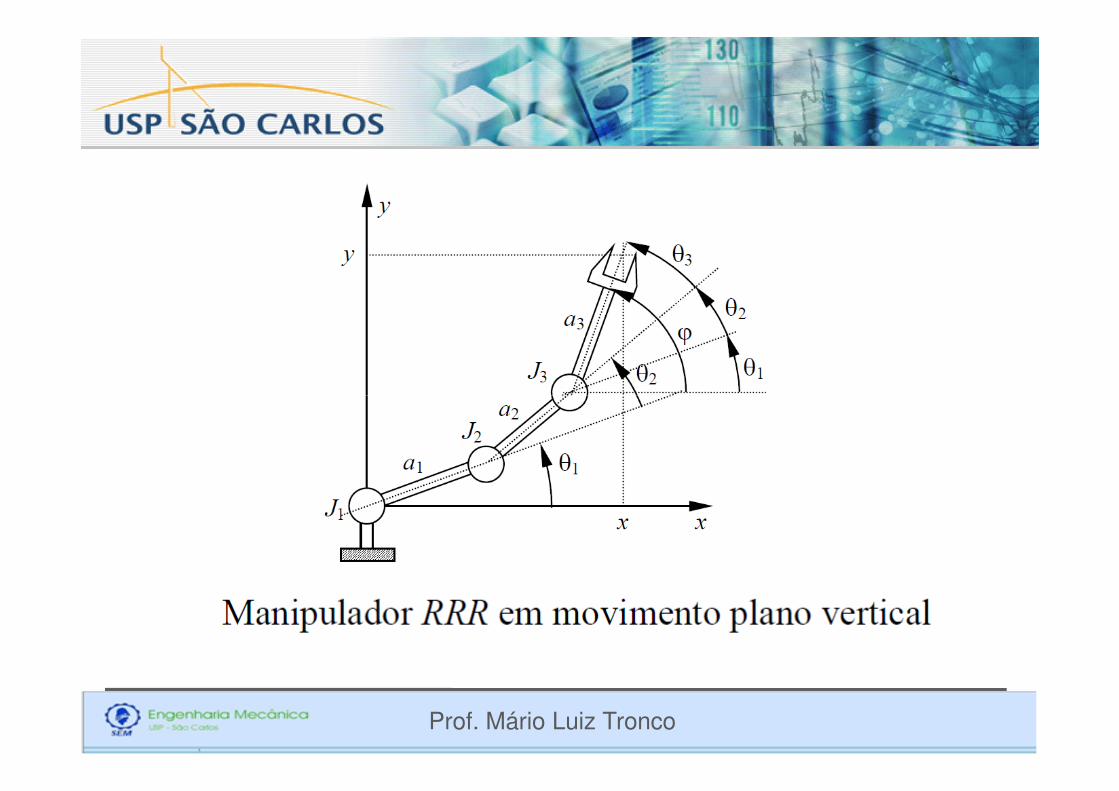
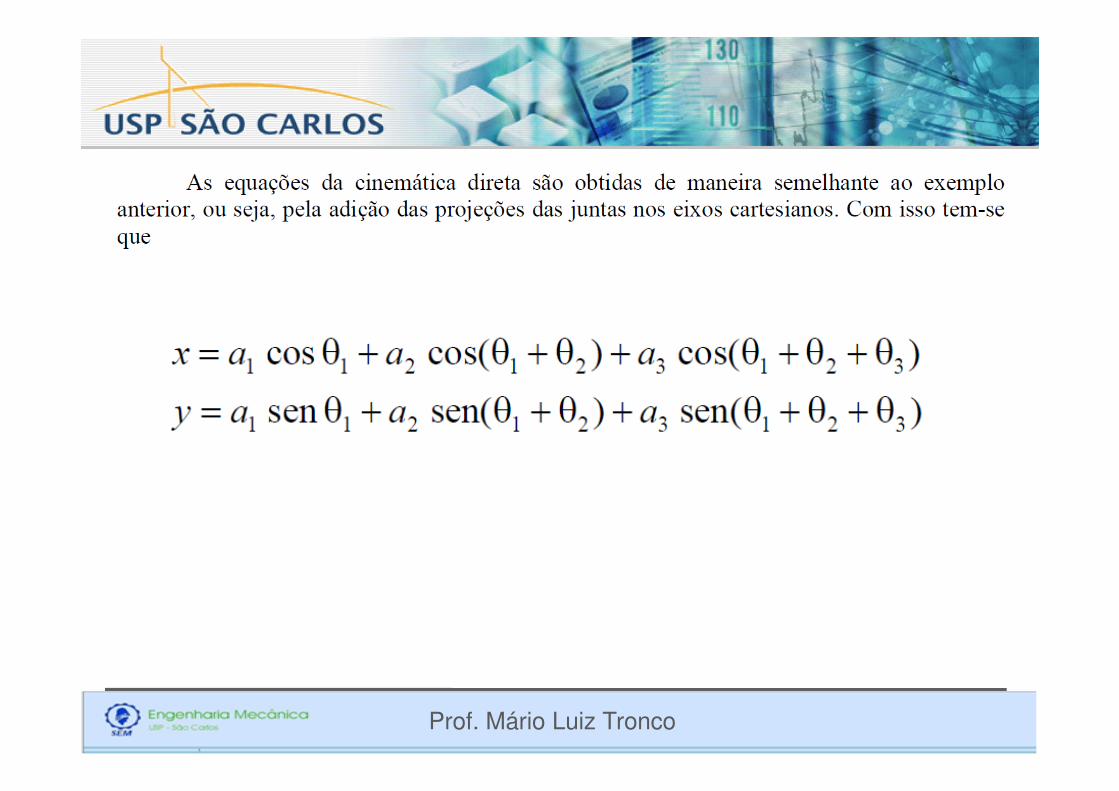
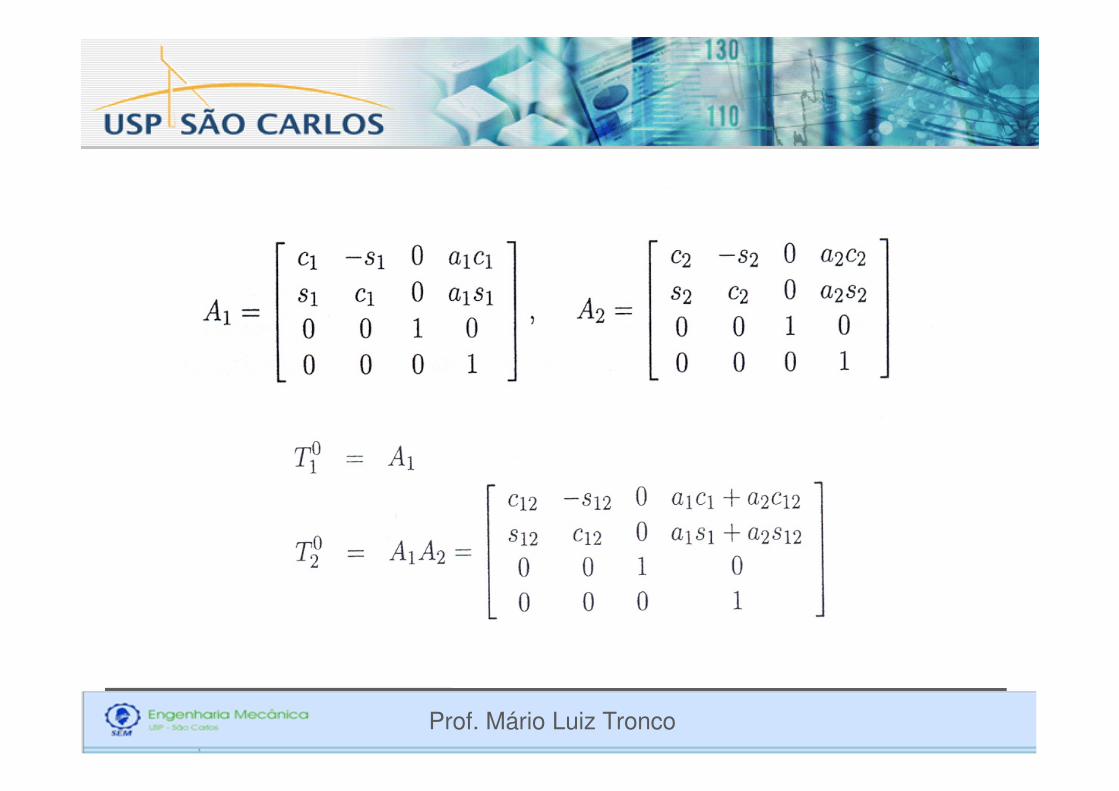
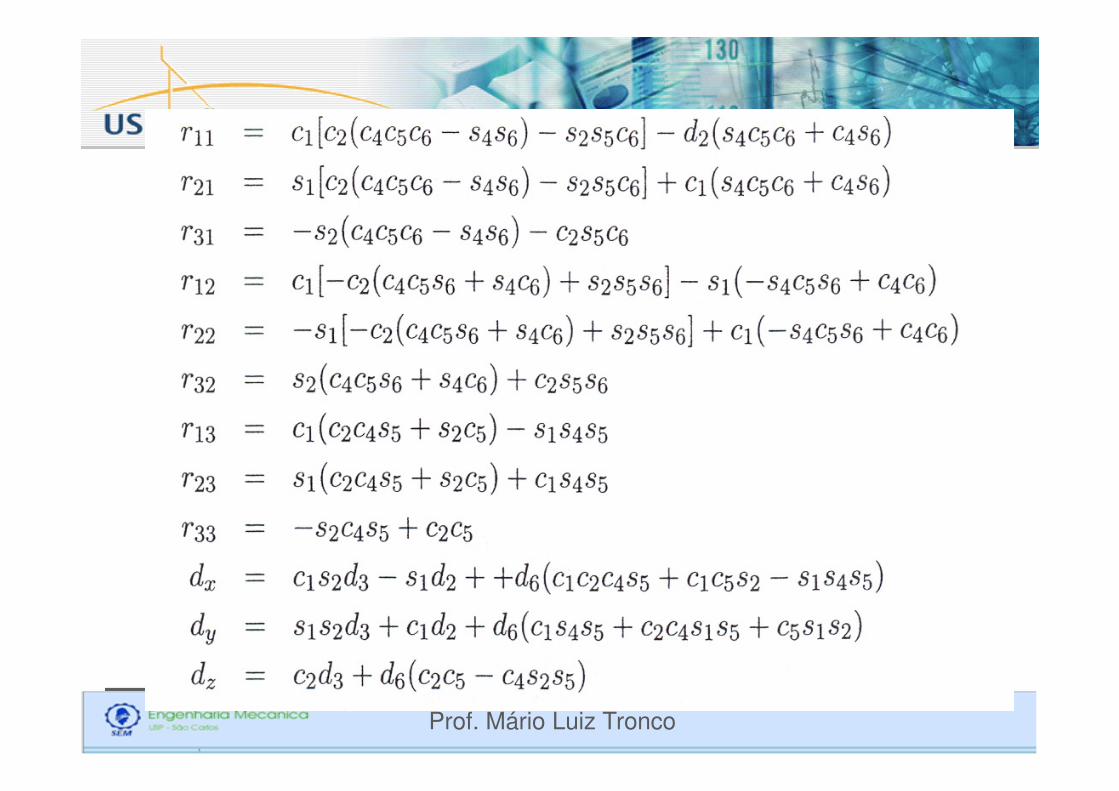
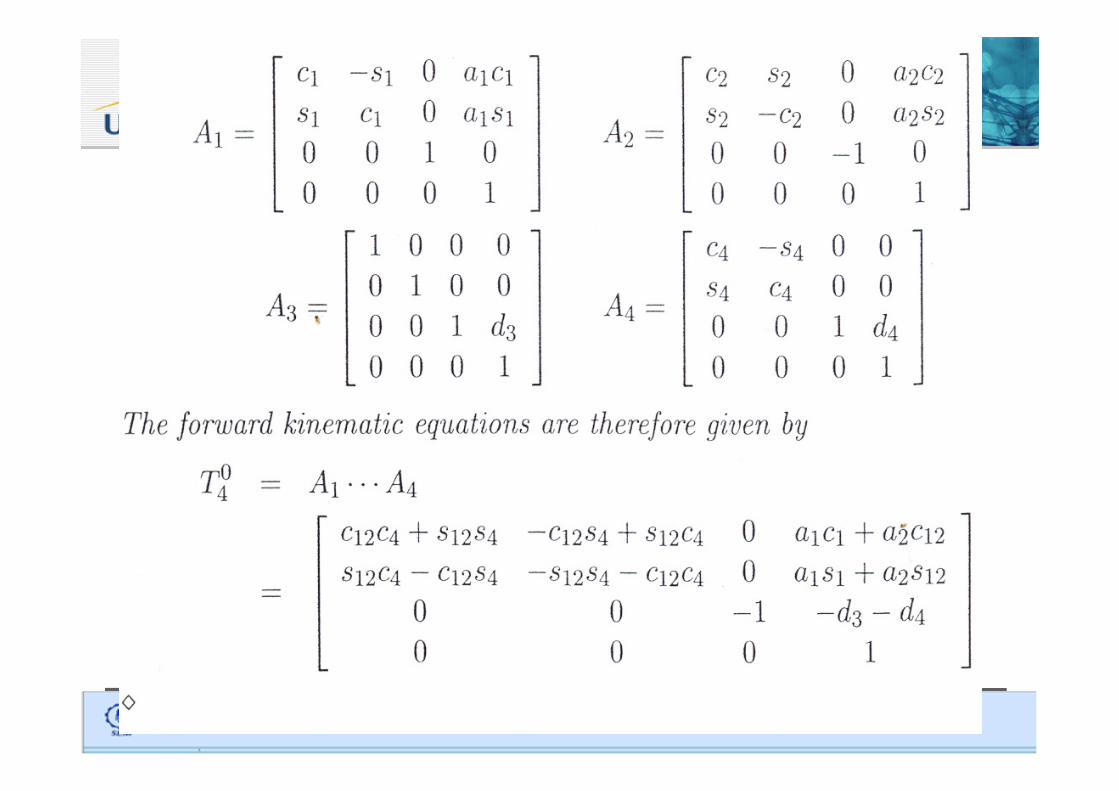
Equações da Cinemática Direta
Mário Luiz TroncoProf. Mário Luiz Tronco
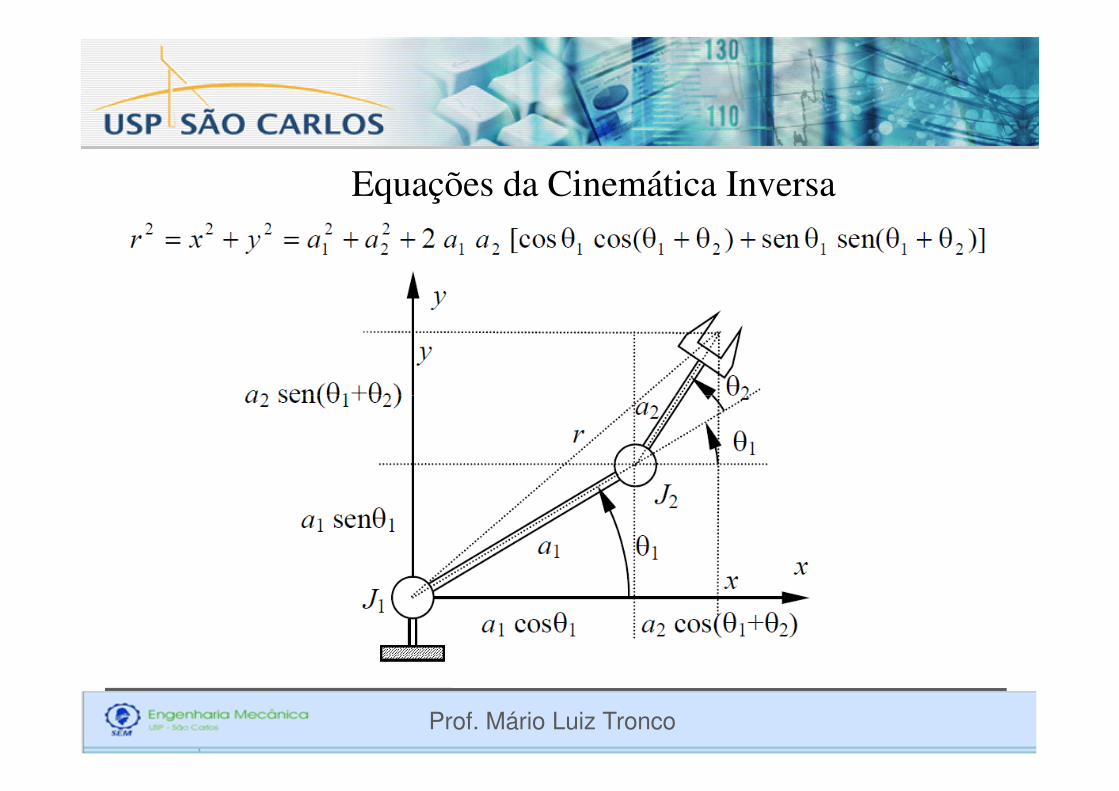
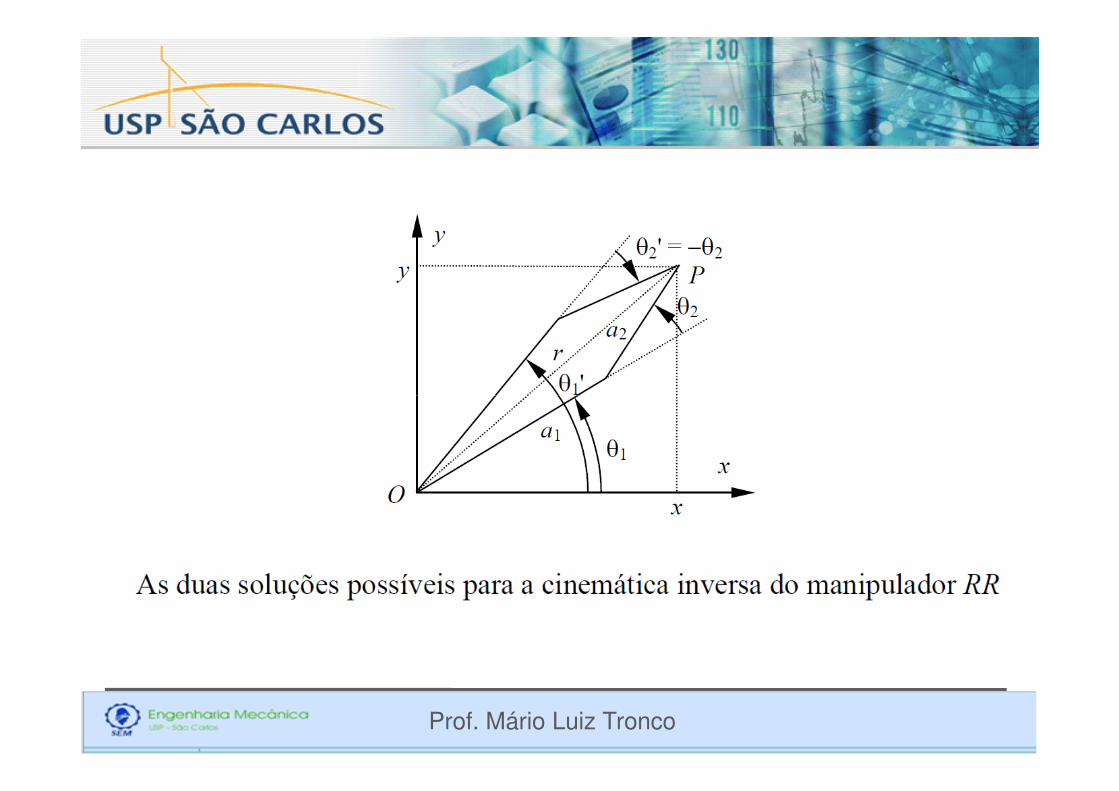
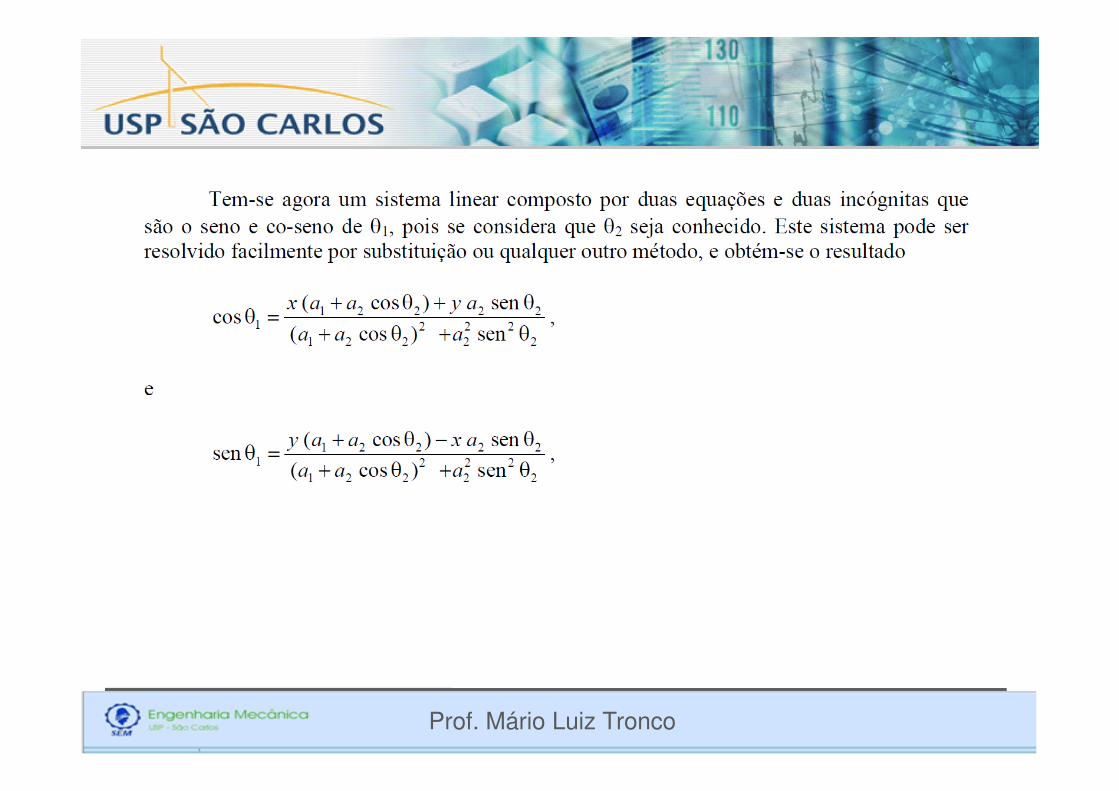
Equações da Cinemática Inversa
Mário Luiz TroncoProf. Mário Luiz Tronco
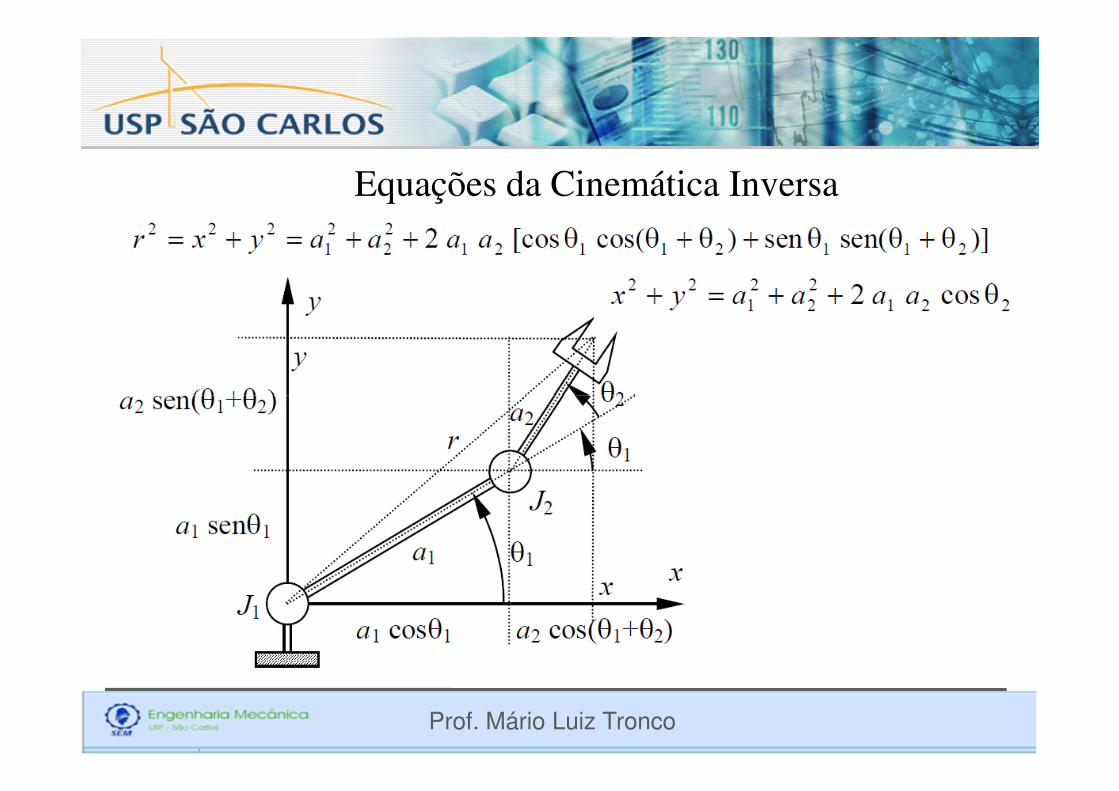
Equações da Cinemática Inversa
Mário Luiz TroncoProf. Mário Luiz Tronco
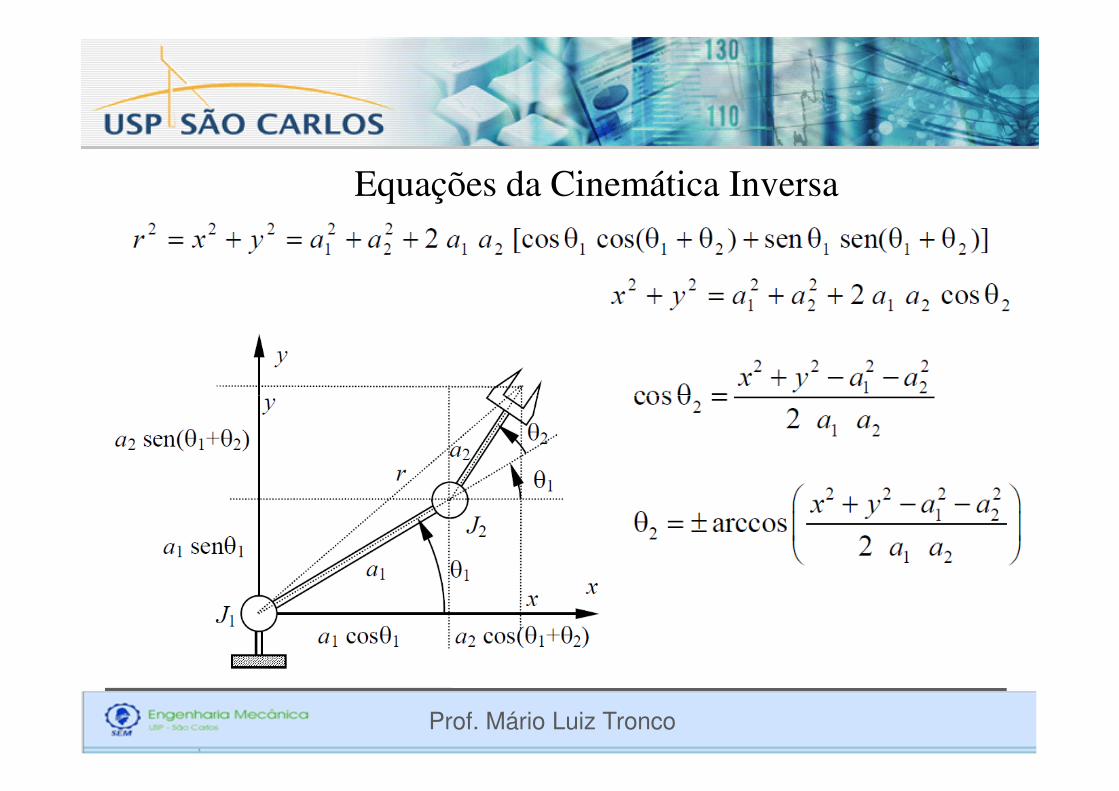
Equações da Cinemática Inversa
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
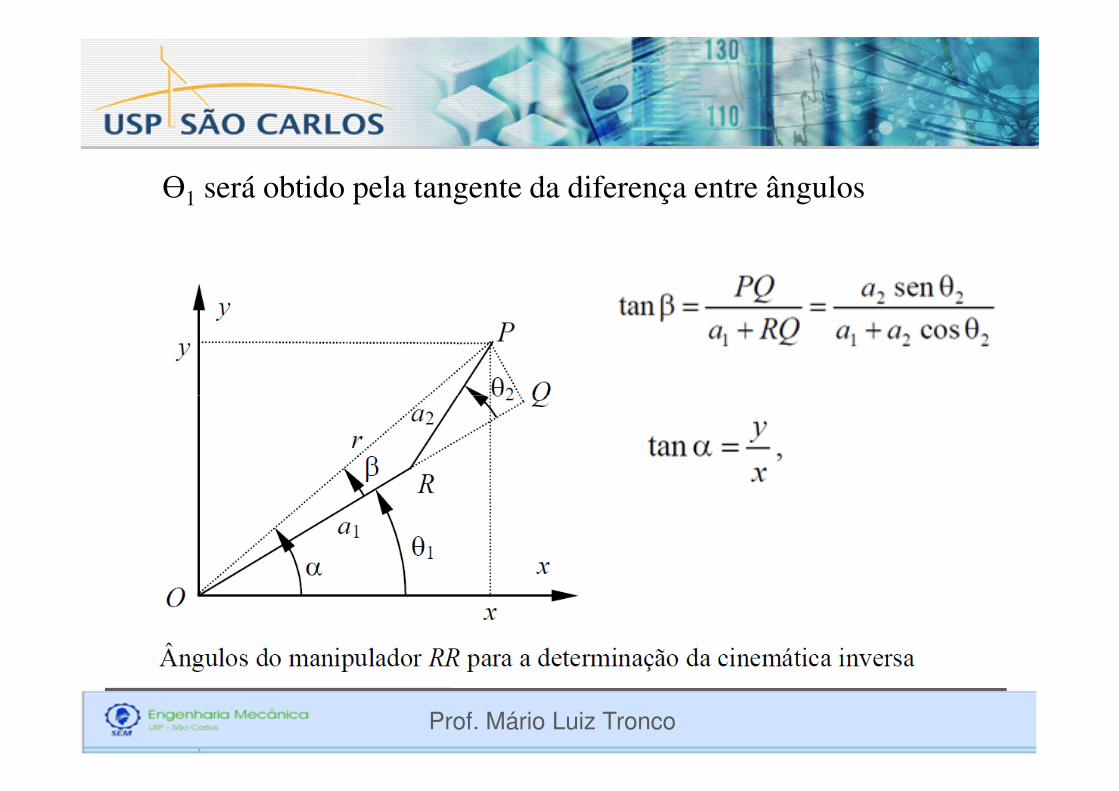
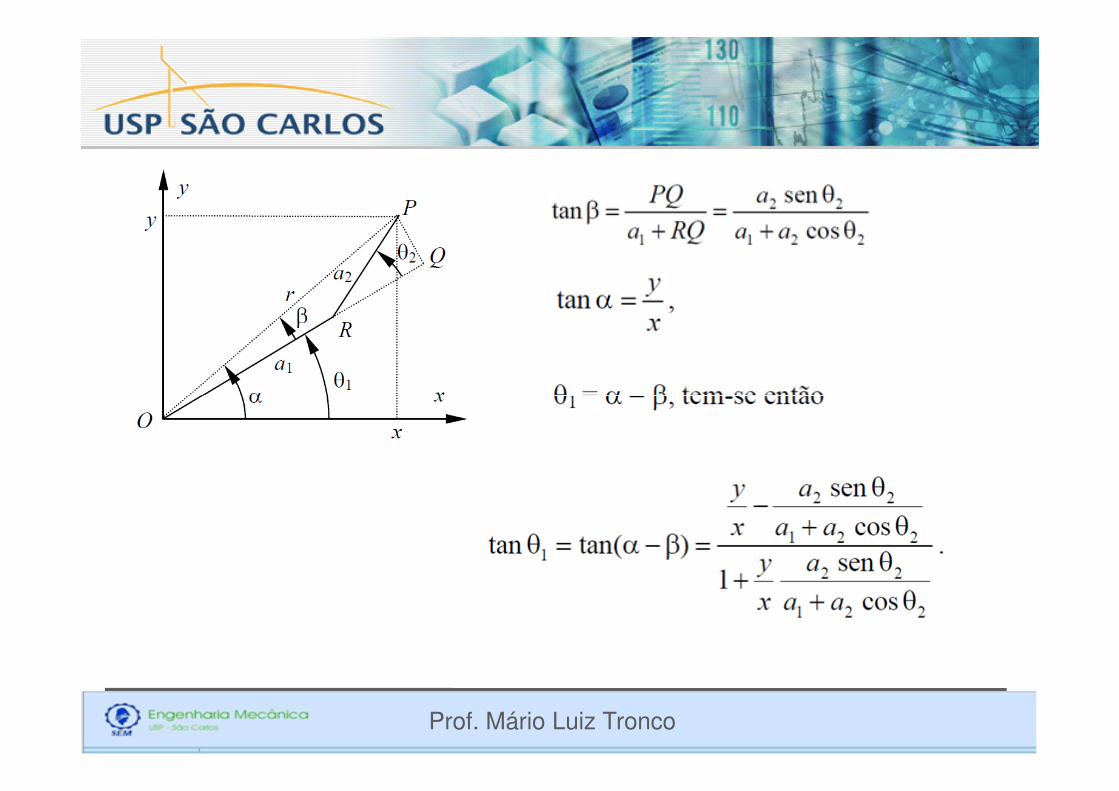
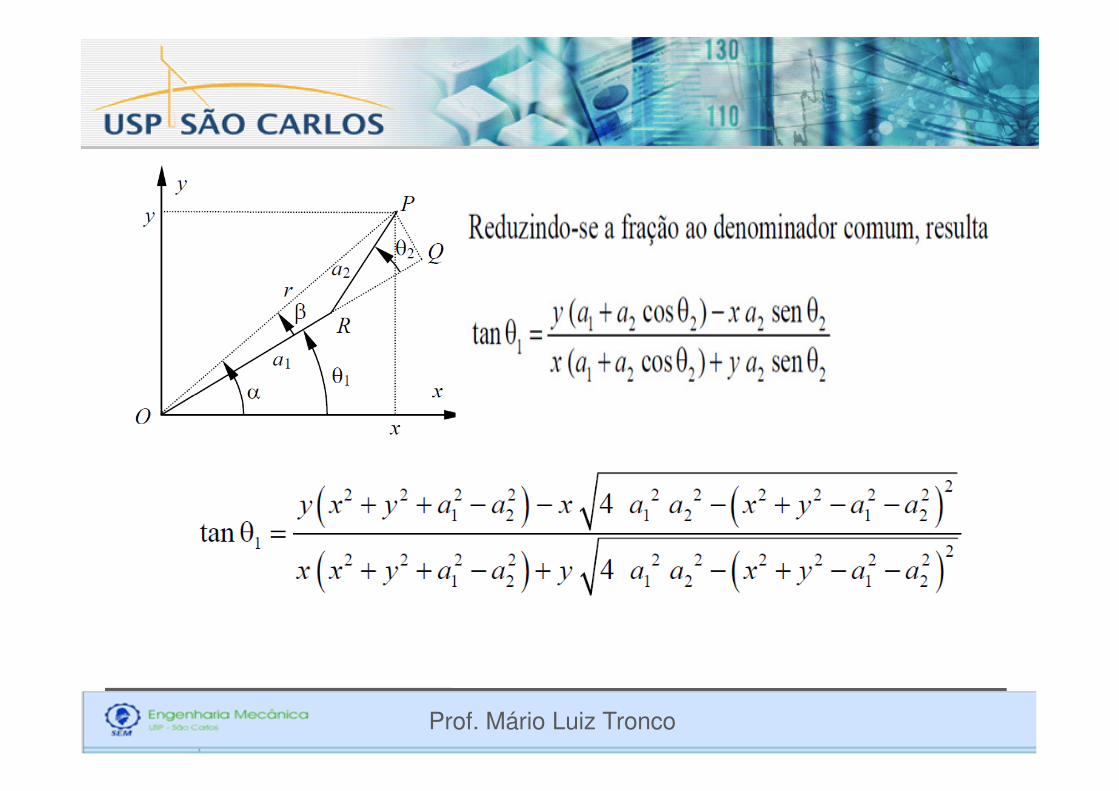
Ө1 será obtido pela tangente da diferença entre ângulos
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
A cinemática inversa não pode ser resolvida, pois há
apenas duas equações e 3 incógnitas (os três ângulos de
juntas).
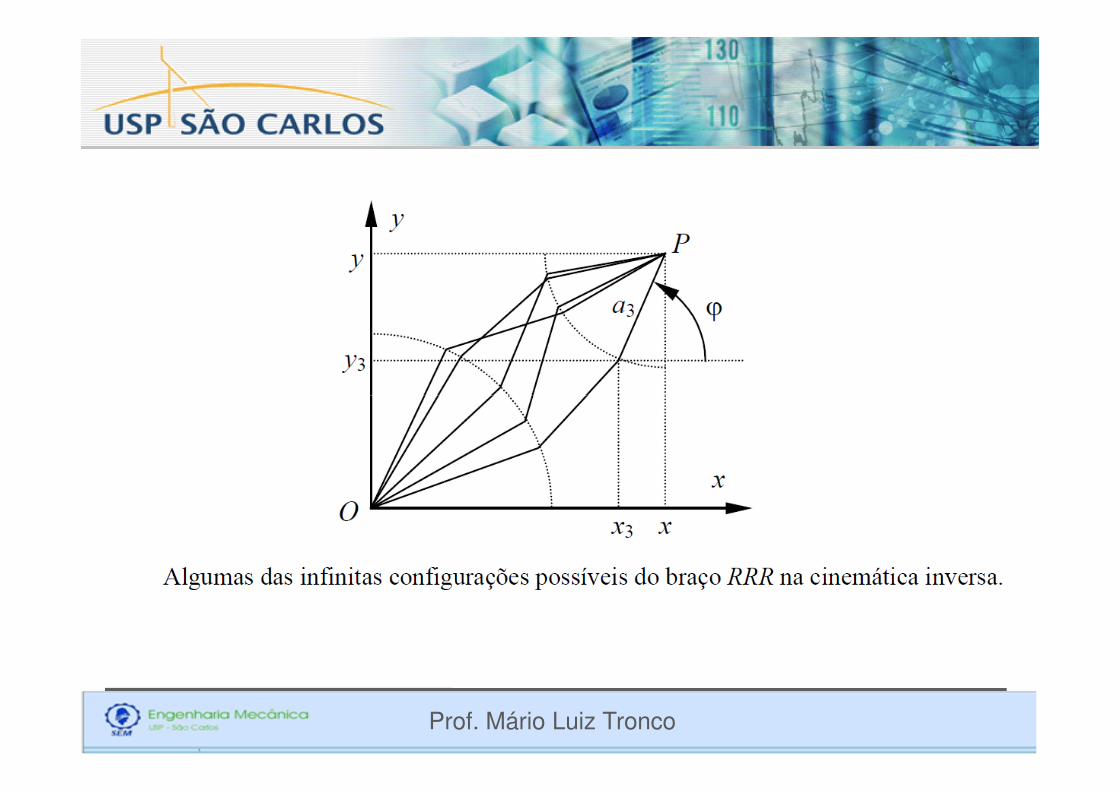
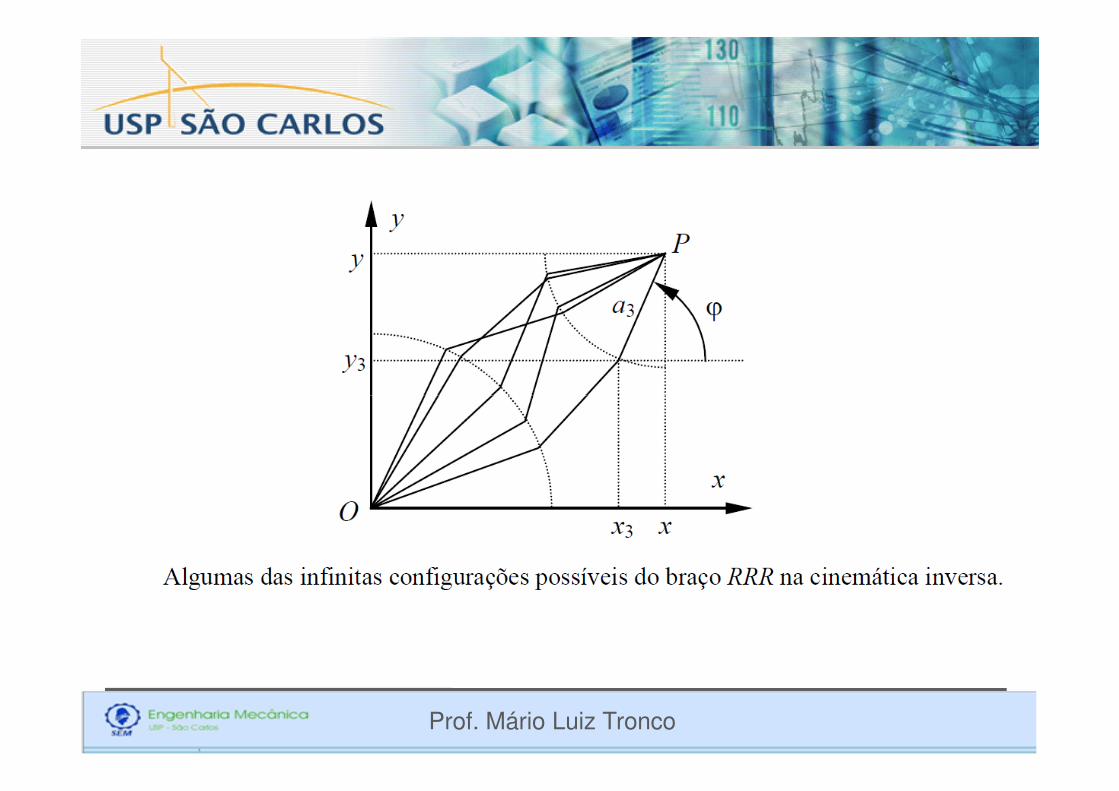
Existem infinitas soluções de ângulos que satisfazem a
condição do órgão terminal atingir um dado ponto no
Mário Luiz TroncoProf. Mário Luiz Tronco
condição do órgão terminal atingir um dado ponto no
plano.
Mário Luiz TroncoProf. Mário Luiz Tronco
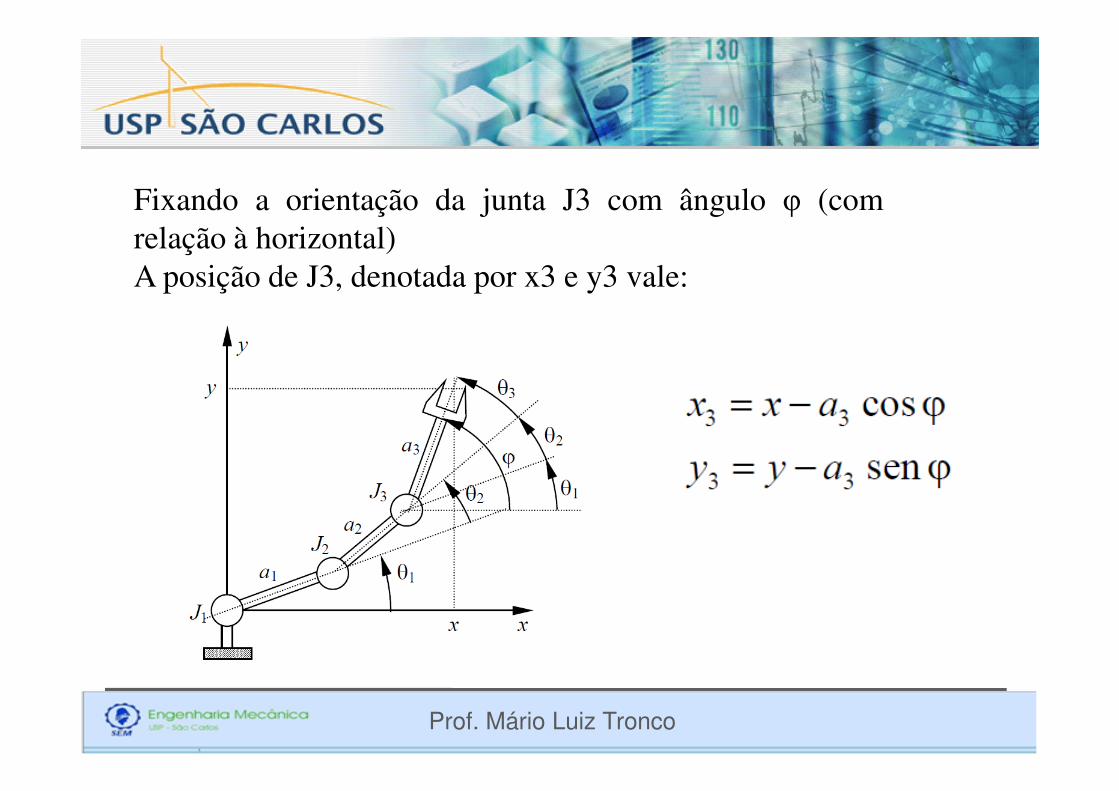
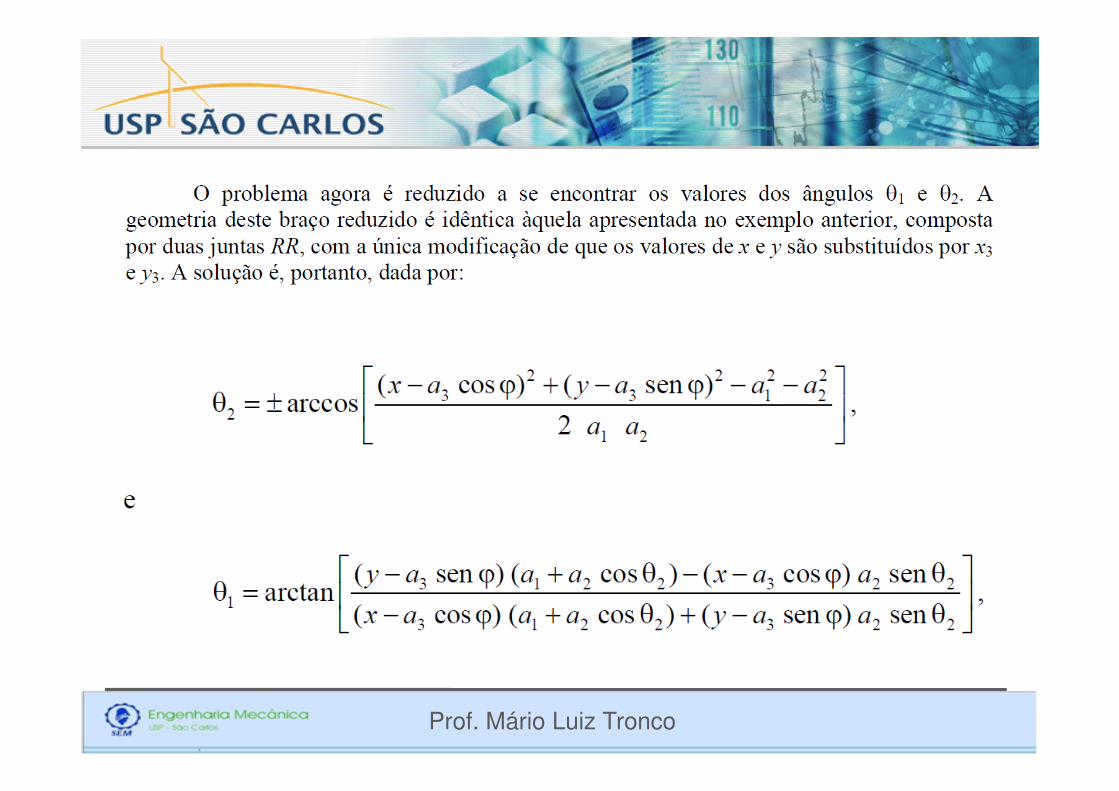
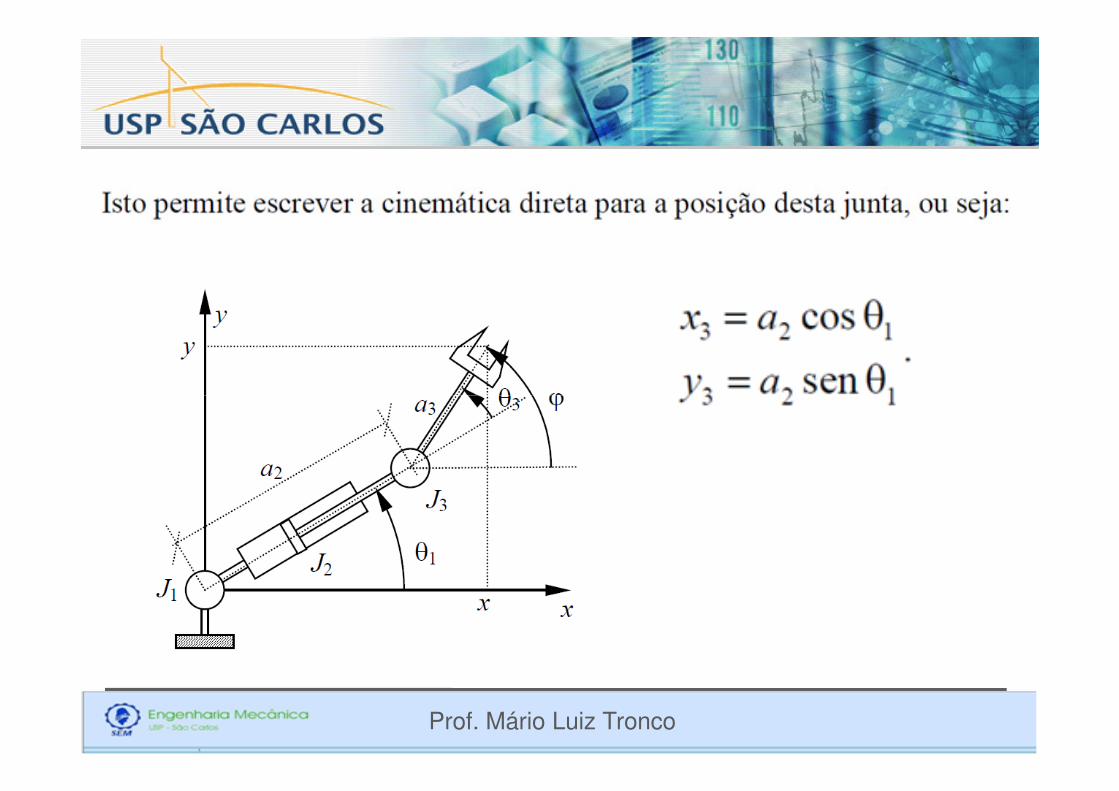
Fixando a orientação da junta J3 com ângulo φ (com
relação à horizontal)
A posição de J3, denotada por x3 e y3 vale:
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco

Mário Luiz TroncoProf. Mário Luiz TroncoProf. Mário Luiz Tronco
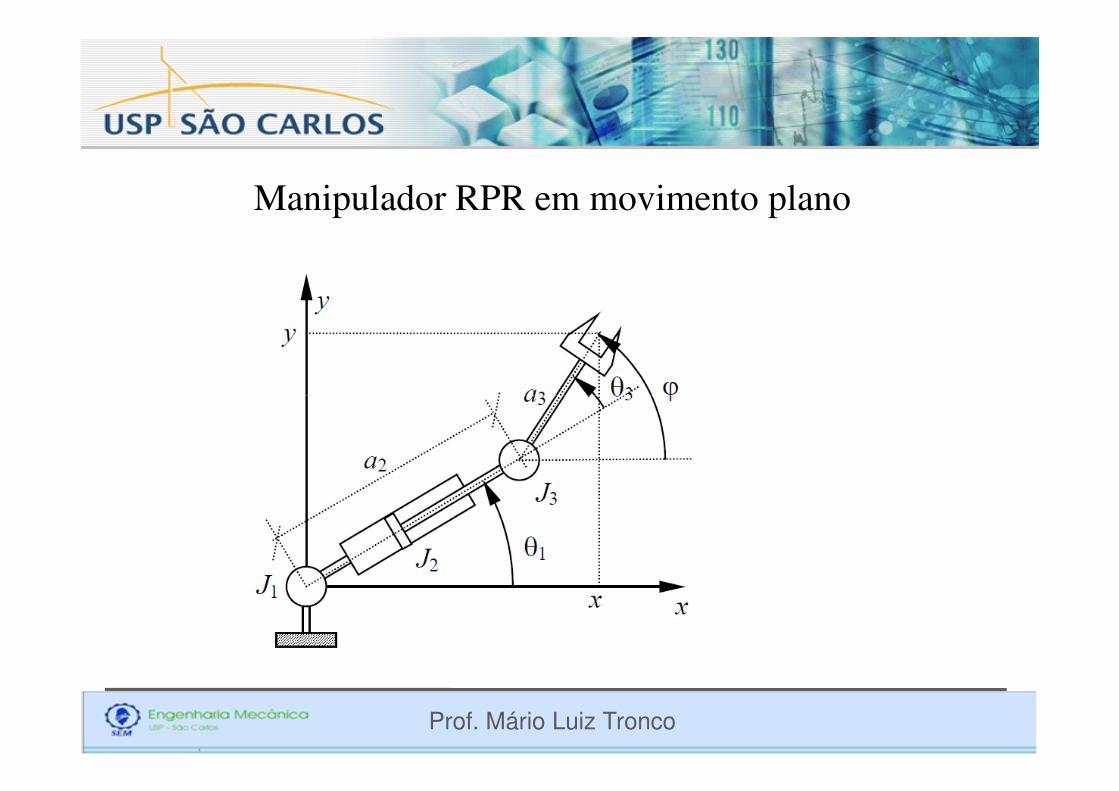
Manipulador RPR em movimento plano
Mário Luiz TroncoProf. Mário Luiz TroncoProf. Mário Luiz Tronco
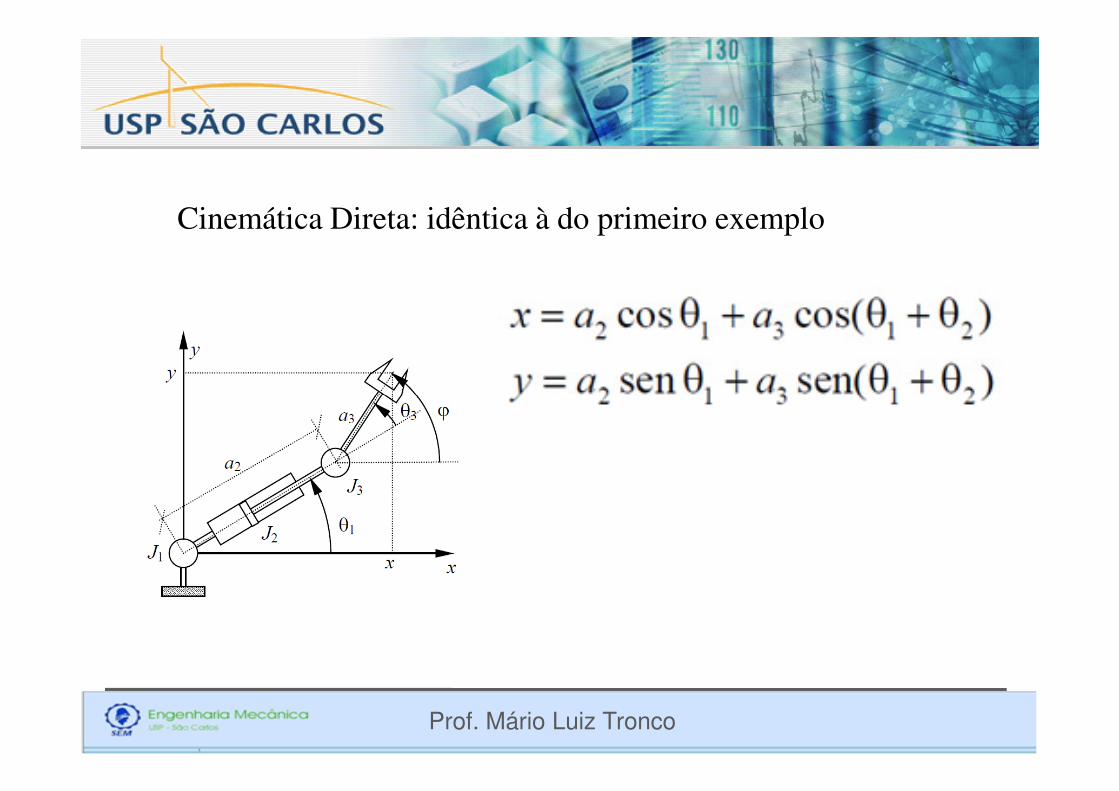
Cinemática Direta: idêntica à do primeiro exemplo
Mário Luiz TroncoProf. Mário Luiz TroncoProf. Mário Luiz Tronco
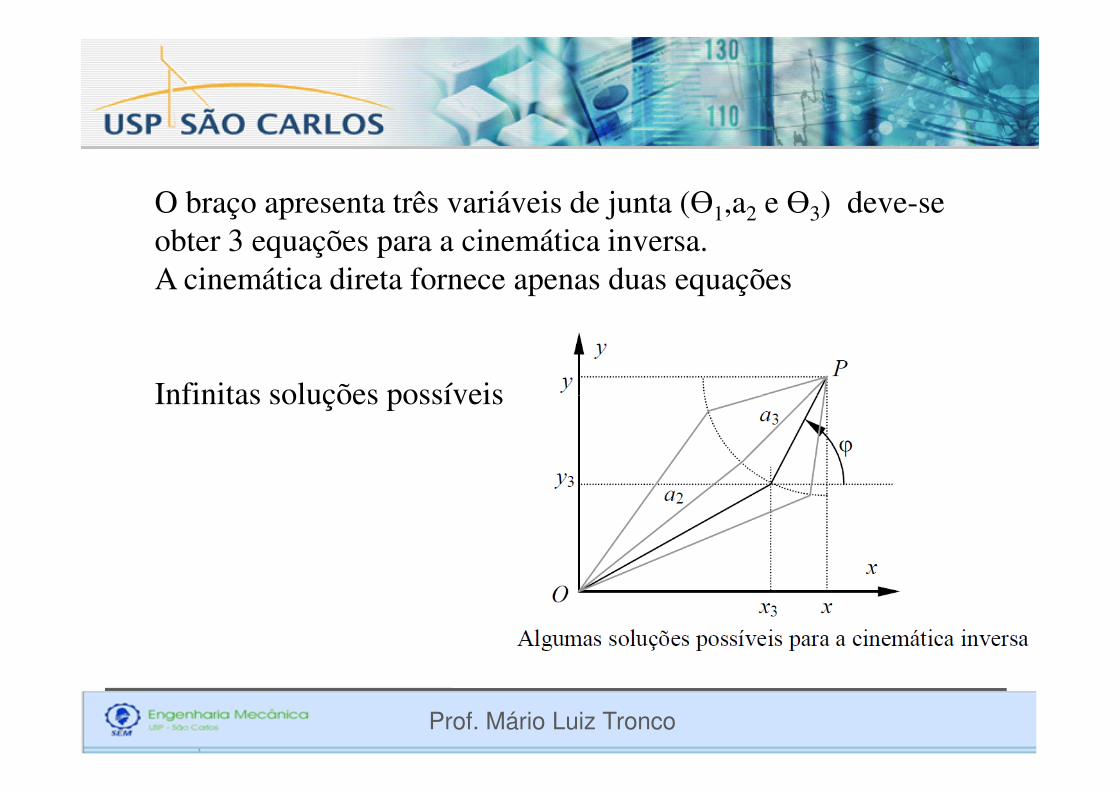
O braço apresenta três variáveis de junta (ϴ1,a2 e ϴ3) deve-se
obter 3 equações para a cinemática inversa.
A cinemática direta fornece apenas duas equações
Infinitas soluções possíveis
Mário Luiz TroncoProf. Mário Luiz Tronco
Infinitas soluções possíveis

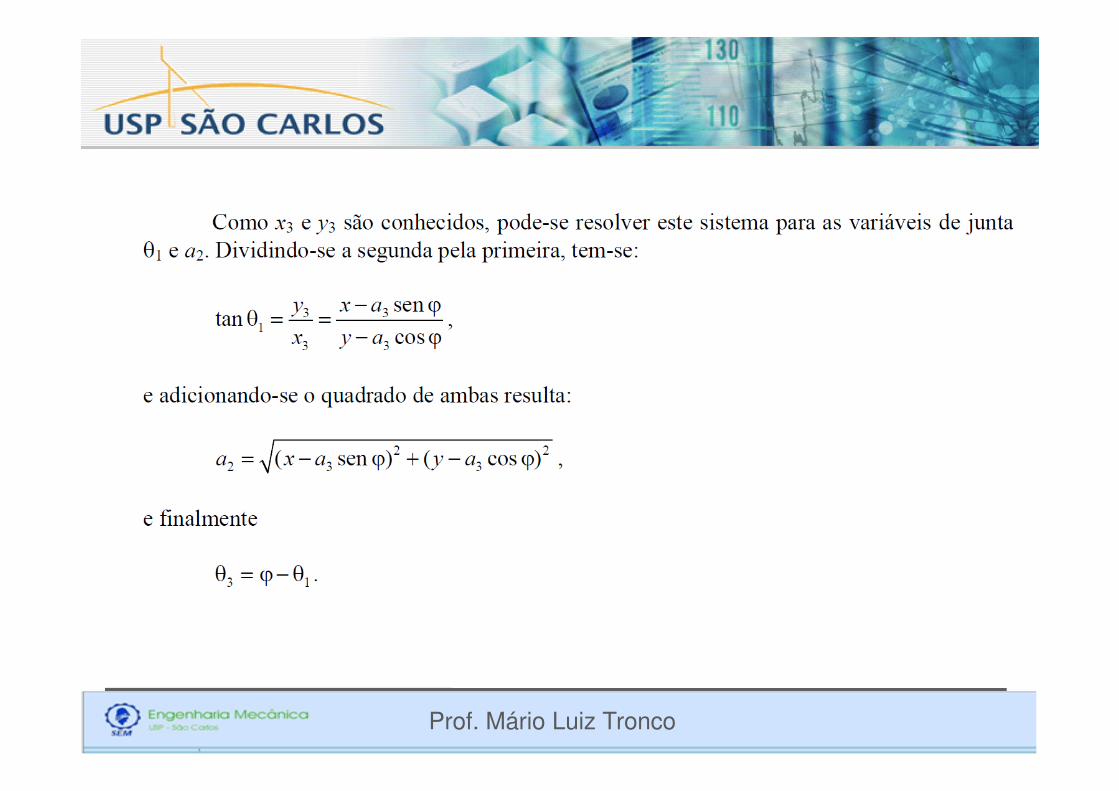
A posição x3,y3 da junta J3 fica fixada se o ponto P= (x,y) e o
ângulo φ forem conhecidos:
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
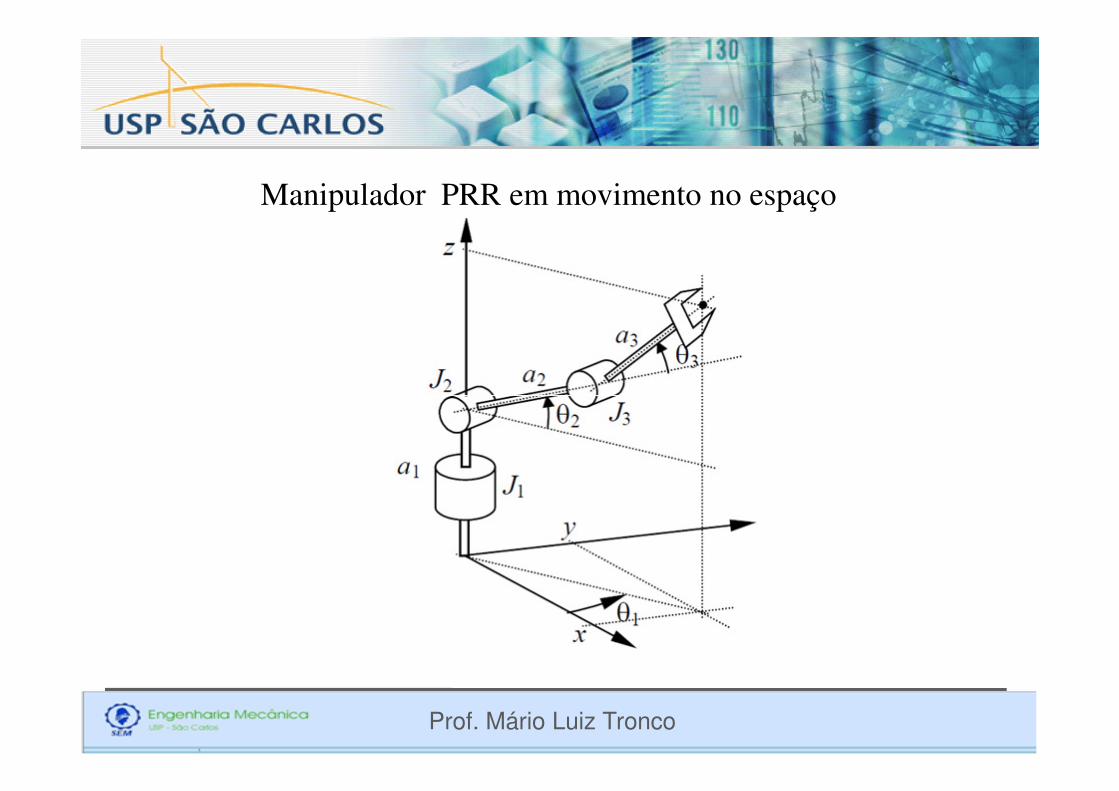
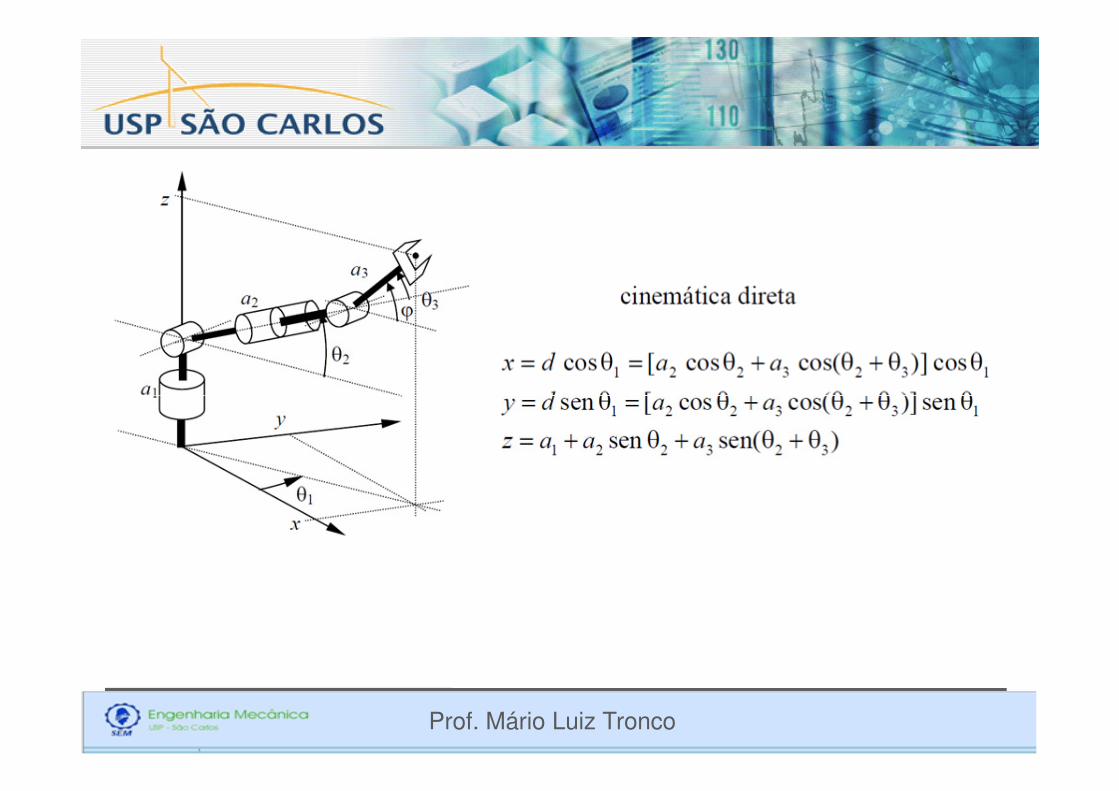
Manipulador PRR em movimento no espaço
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
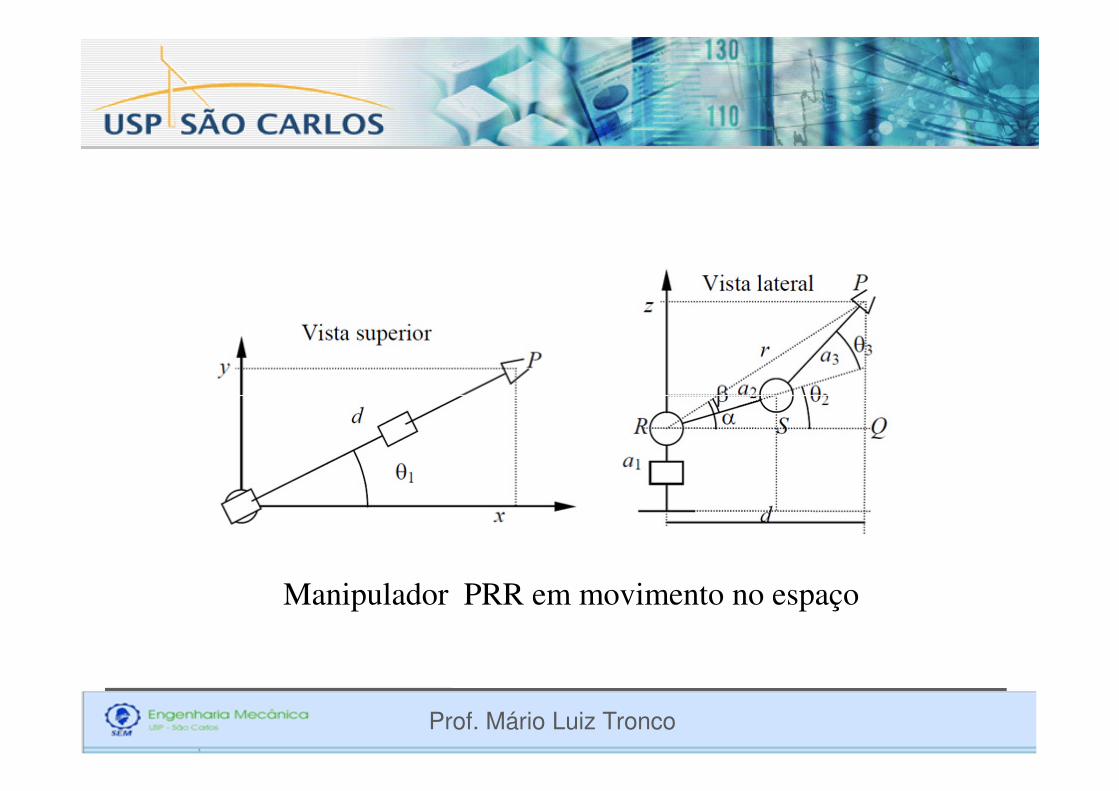
Manipulador PRR em movimento no espaço
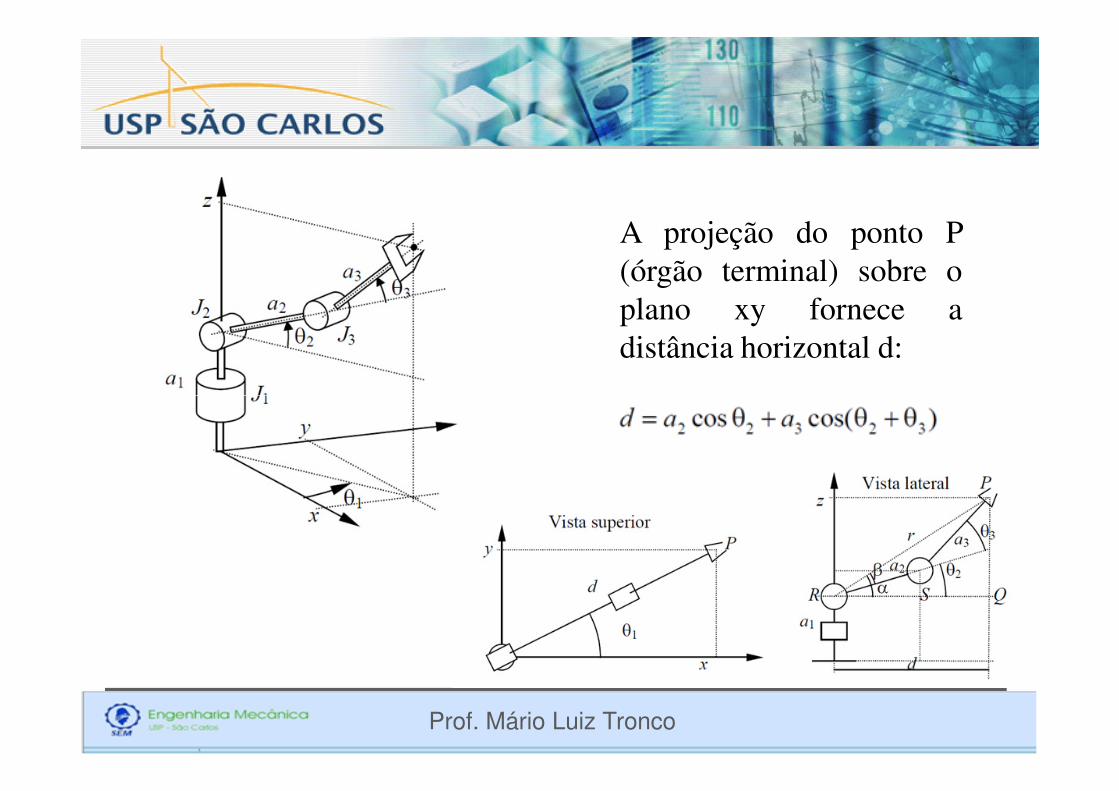
A projeção do ponto P
(órgão terminal) sobre o
plano xy fornece a
distância horizontal d:
Mário Luiz TroncoProf. Mário Luiz Tronco
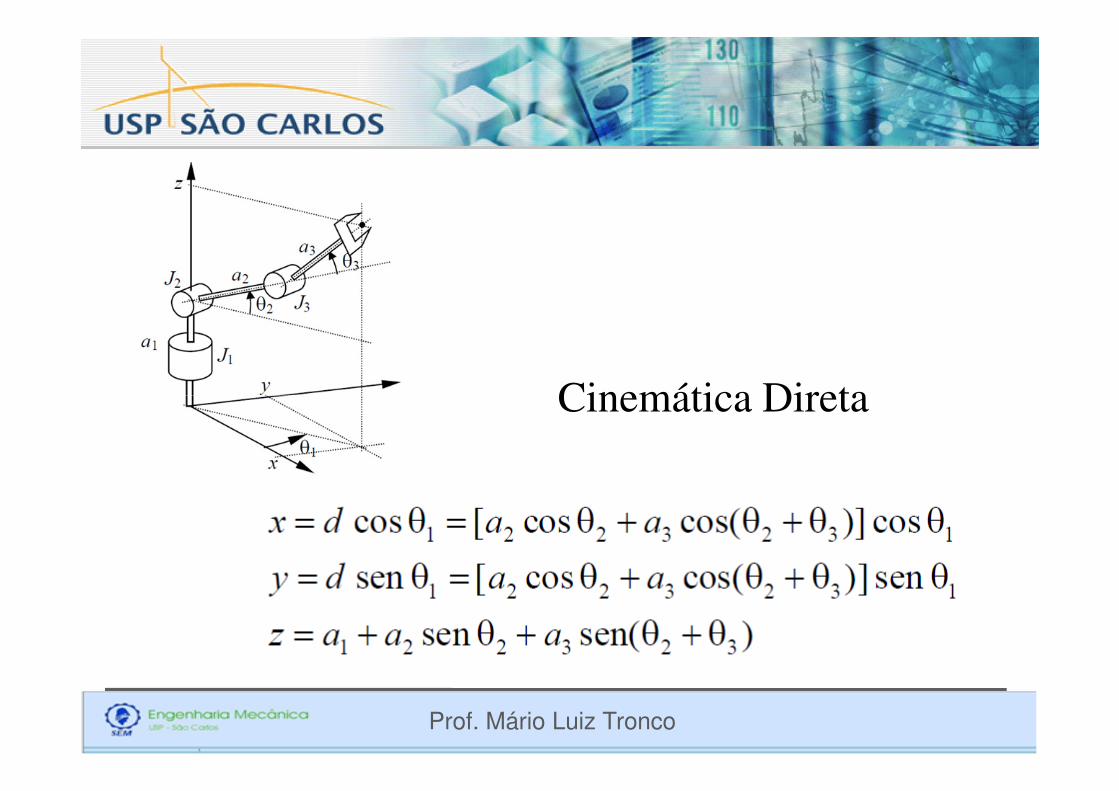
Cinemática Direta
Mário Luiz TroncoProf. Mário Luiz Tronco
Cinemática Direta
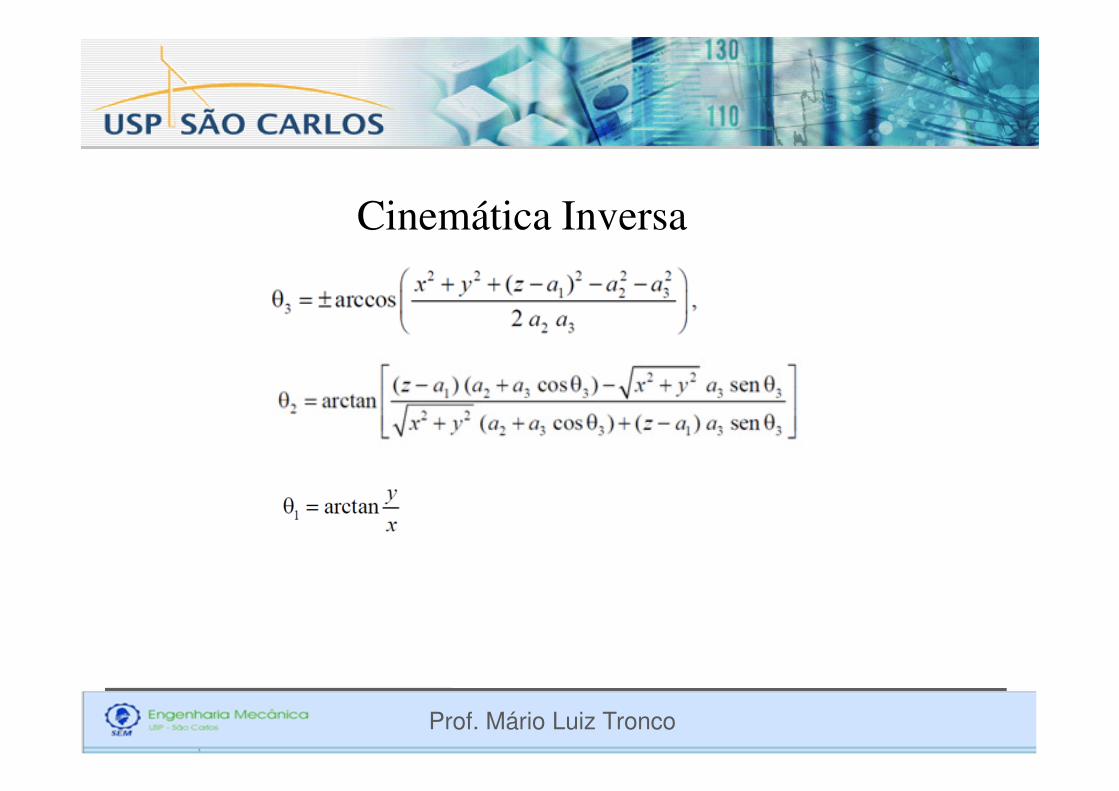
Cinemática Inversa
Mário Luiz TroncoProf. Mário Luiz Tronco
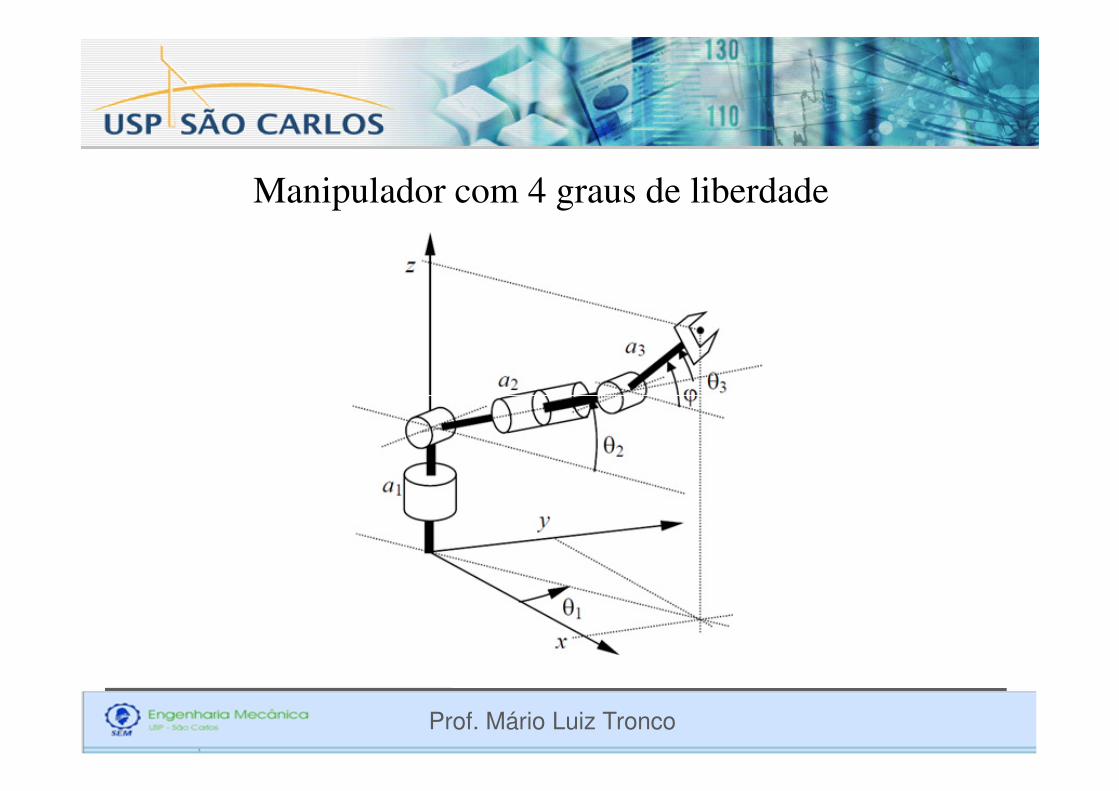
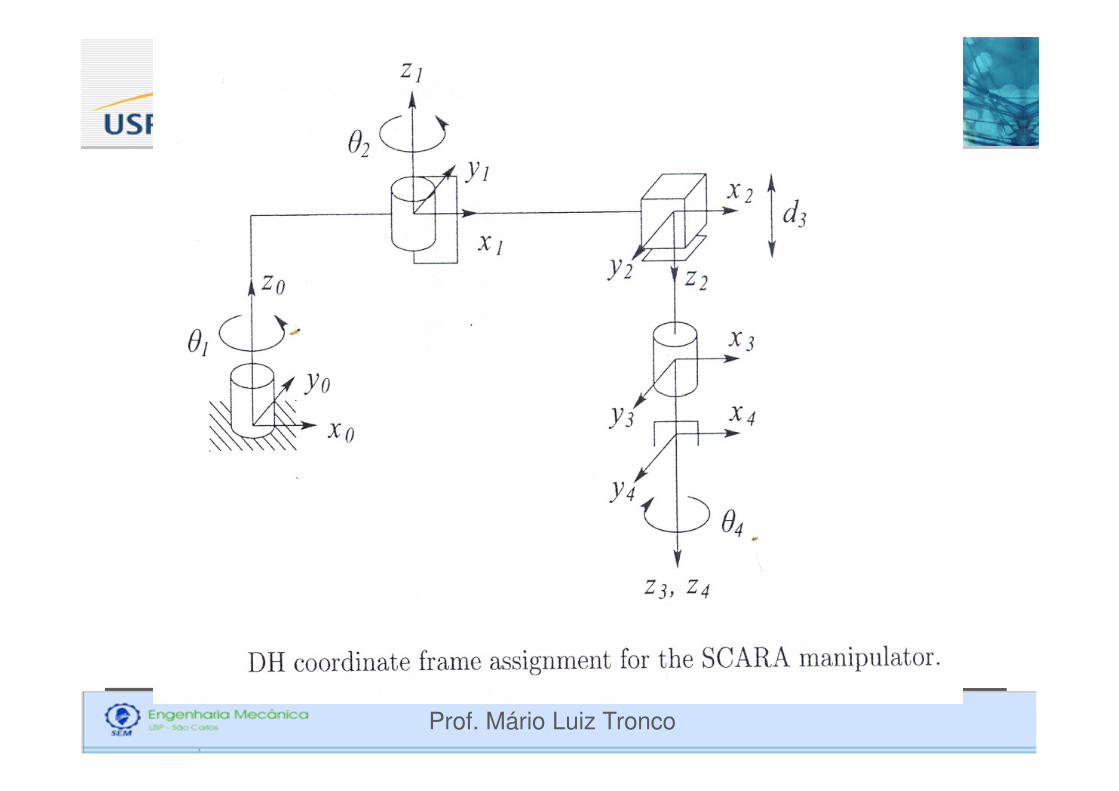
Manipulador com 4 graus de liberdade
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
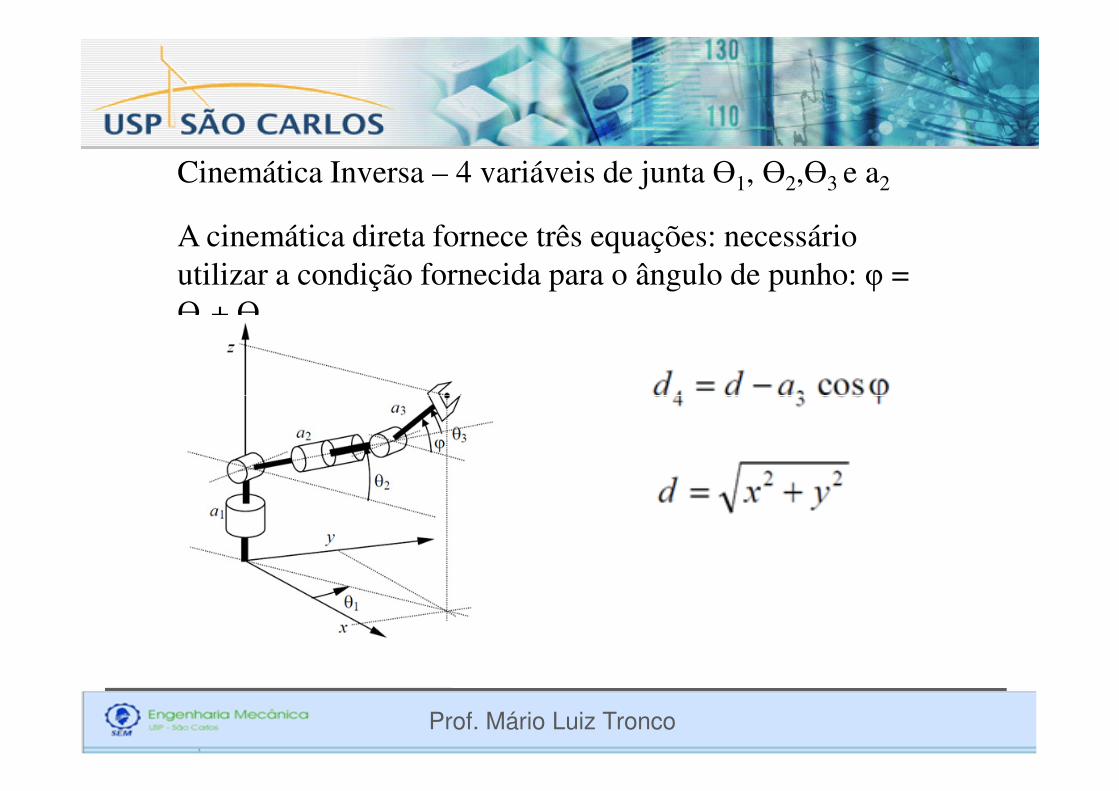
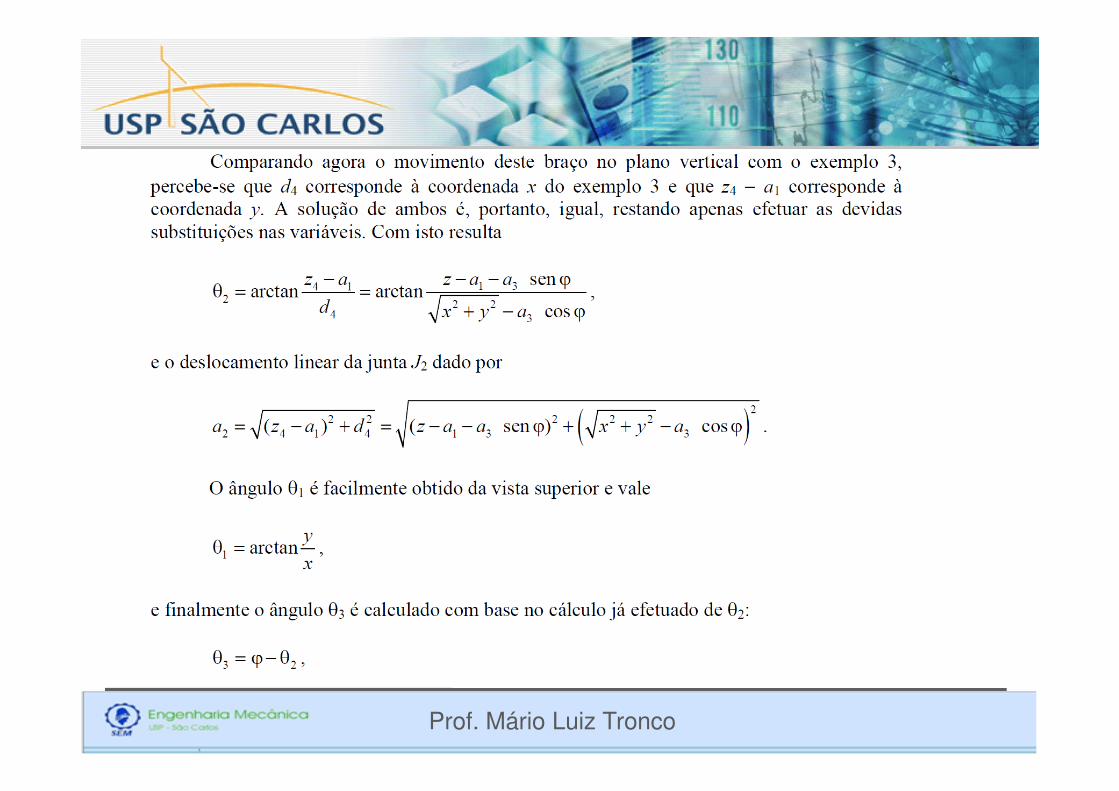
Cinemática Inversa – 4 variáveis de junta ϴ1, ϴ2,ϴ3 e a2
A cinemática direta fornece três equações: necessário
utilizar a condição fornecida para o ângulo de punho: φ =
ϴ2+ ϴ3
Mário Luiz TroncoProf. Mário Luiz Tronco

Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
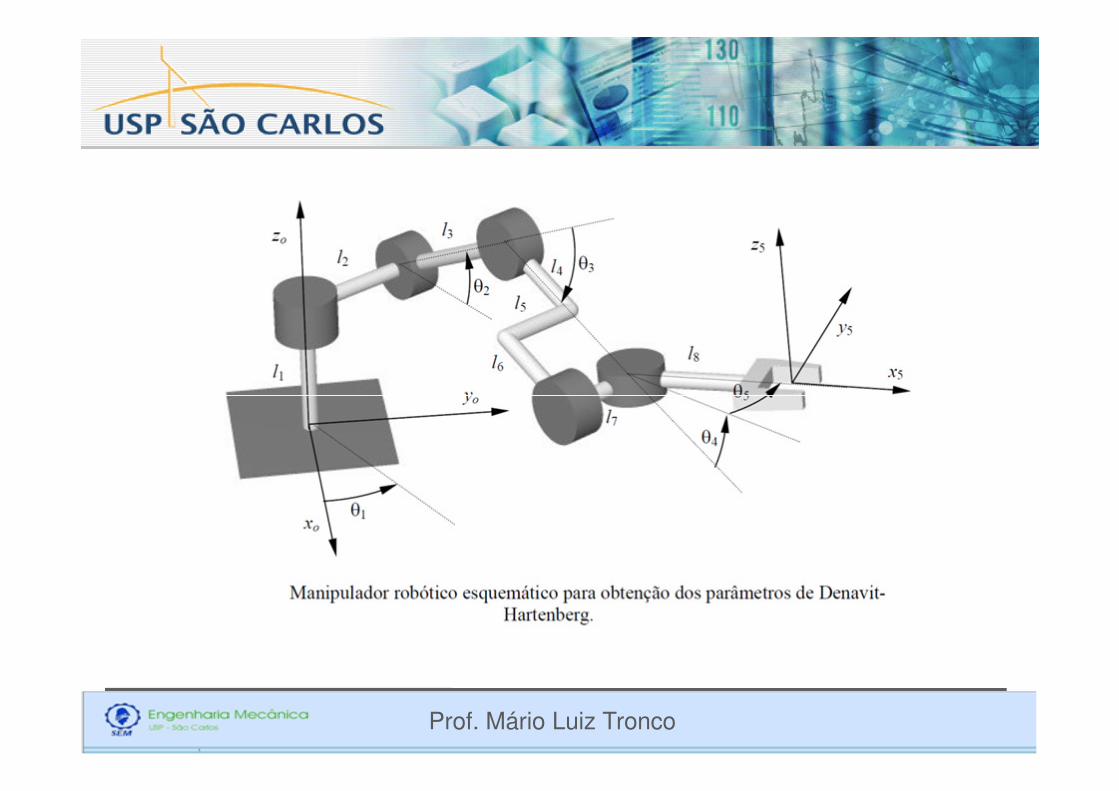
Modelo Geométrico
O modelo geométrico de um robô expressa a posição e orientação de seu elemento
terminal em relação a um sistema de coordenadas solidário a base do robô, em
função de suas coordenadas generalizadas (coordenadas angulares no caso de juntas
rotacionais). O modelo geométrico é representado pela expressão:
Mário Luiz TroncoProf. Mário Luiz Tronco
X = f( θ )
onde
θ = (θ1, θ2, ......, θn): vetor das posições angulares das juntas e
X = (X, Y, Z, ψ, θ, φ): vetor posição, onde os três primeiros termos denotam a posição
cartesiana e os três últimos a orientação do órgão terminal.
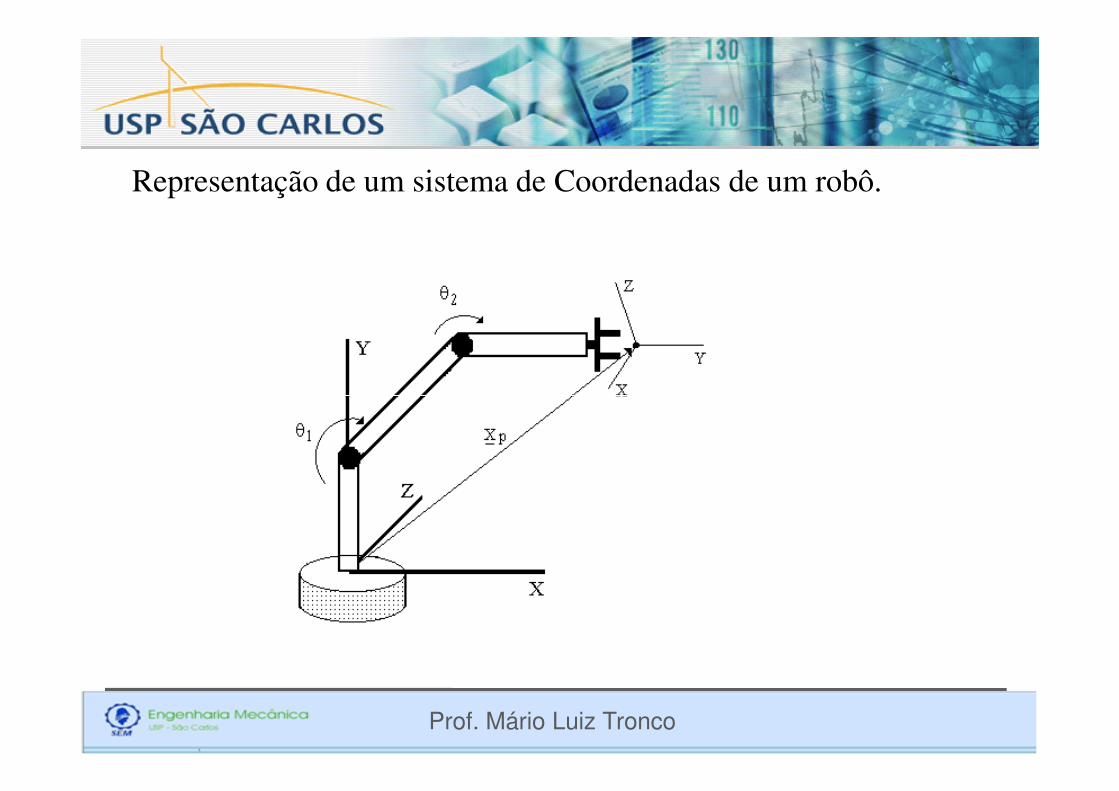
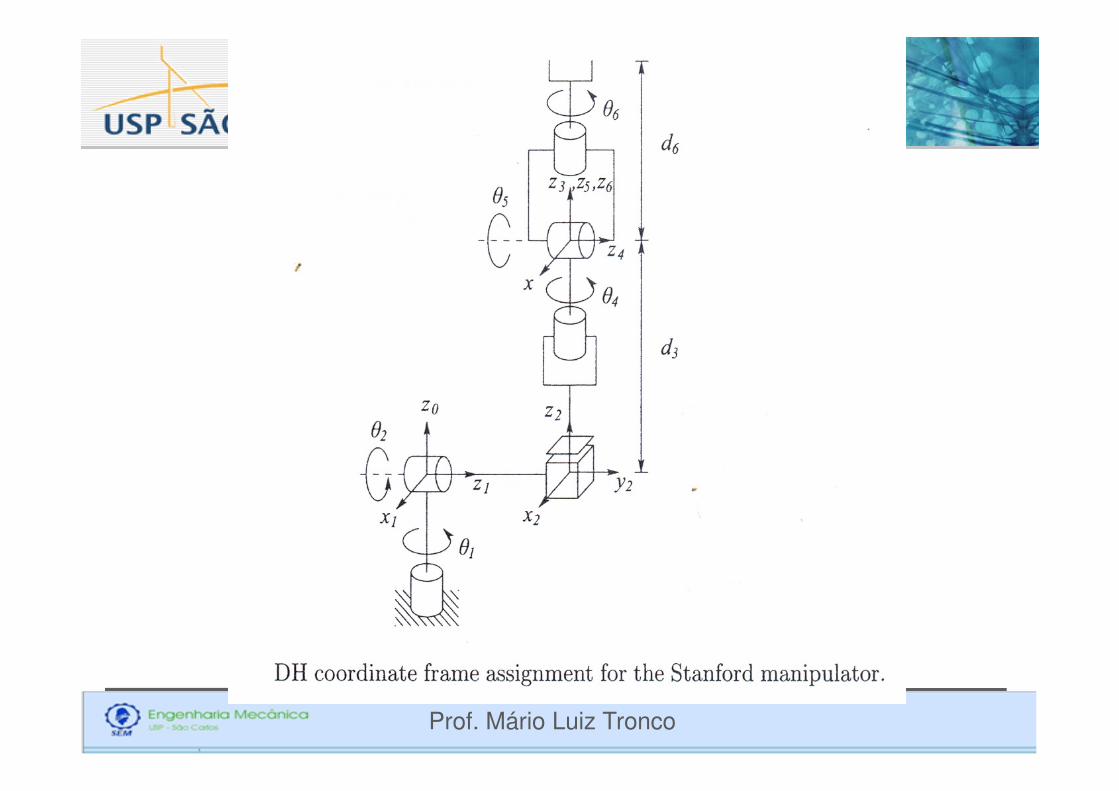
Representação de um sistema de Coordenadas de um robô.
Mário Luiz TroncoProf. Mário Luiz Tronco
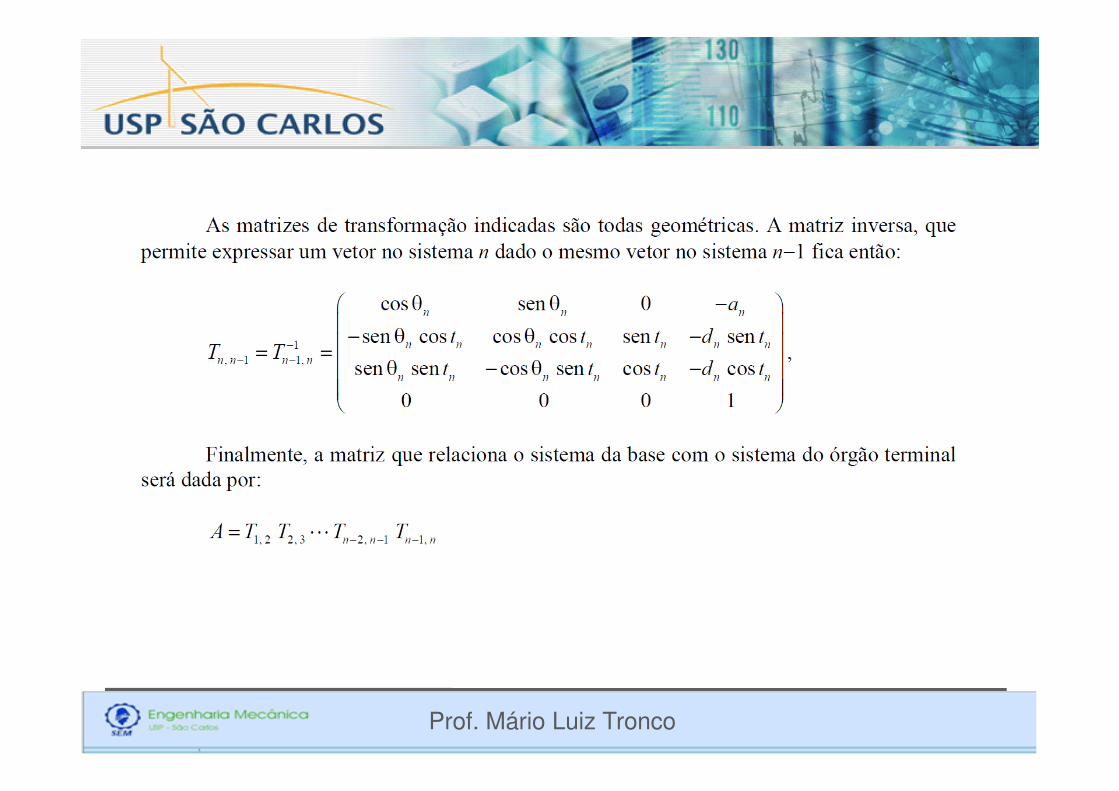
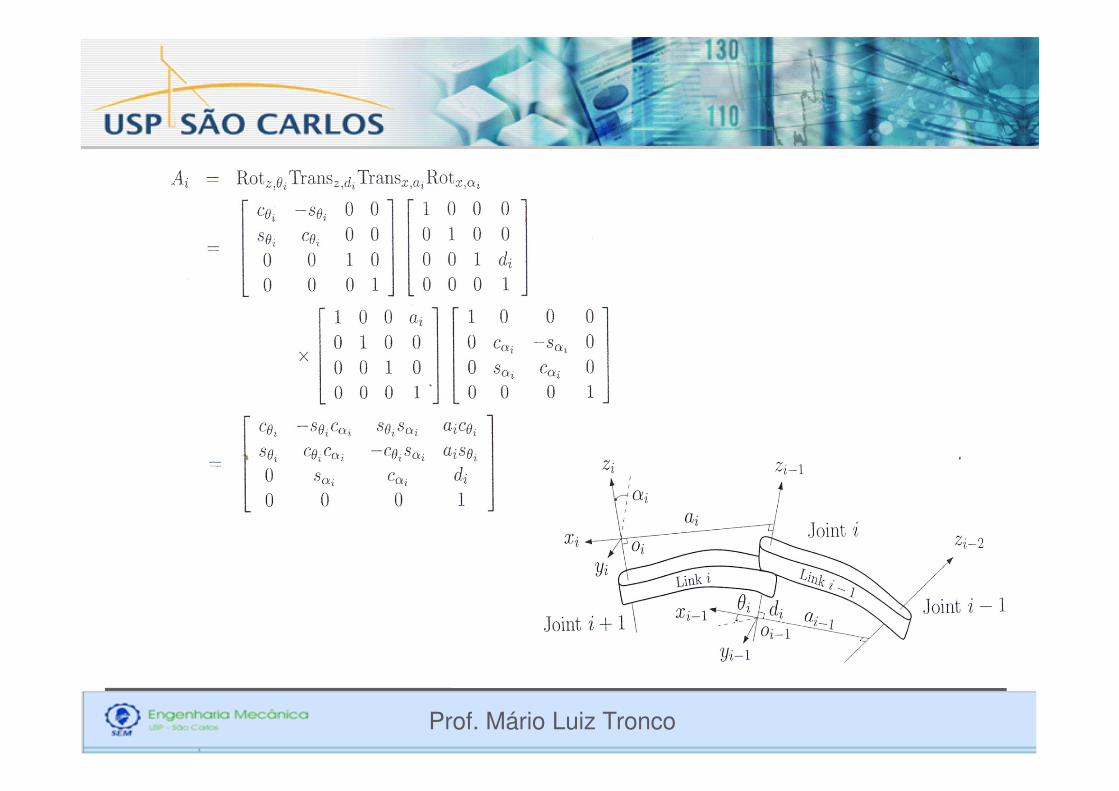
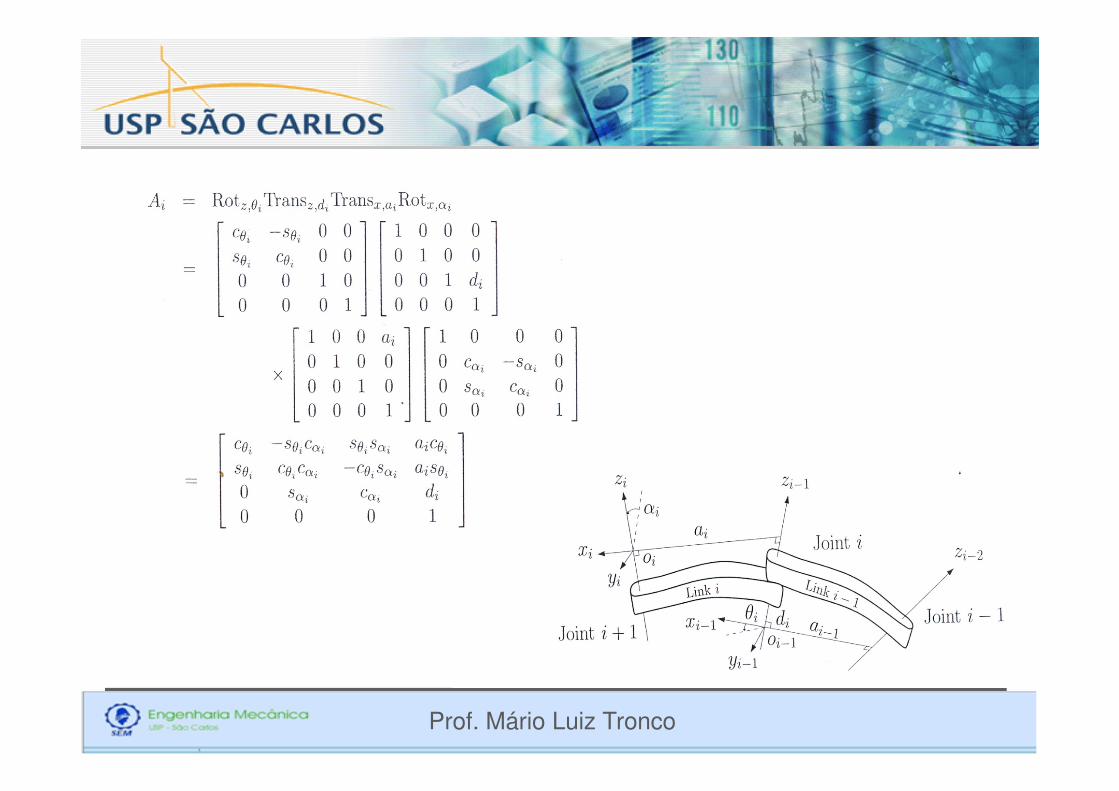
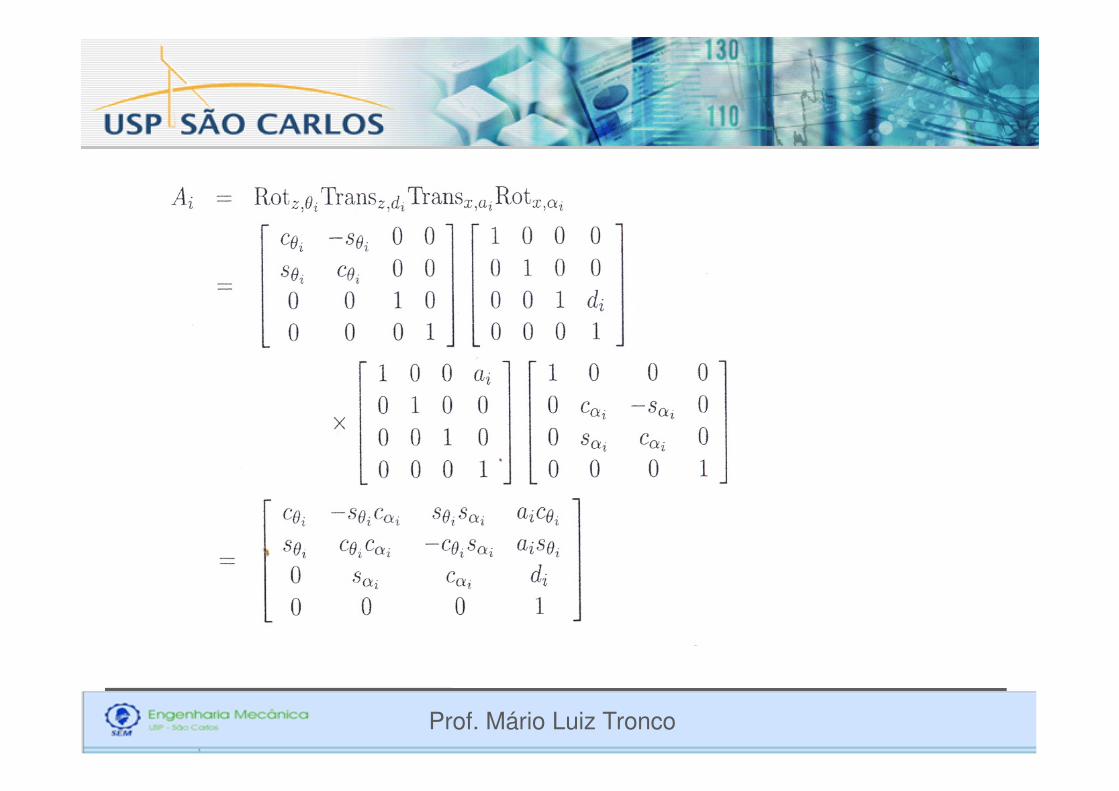
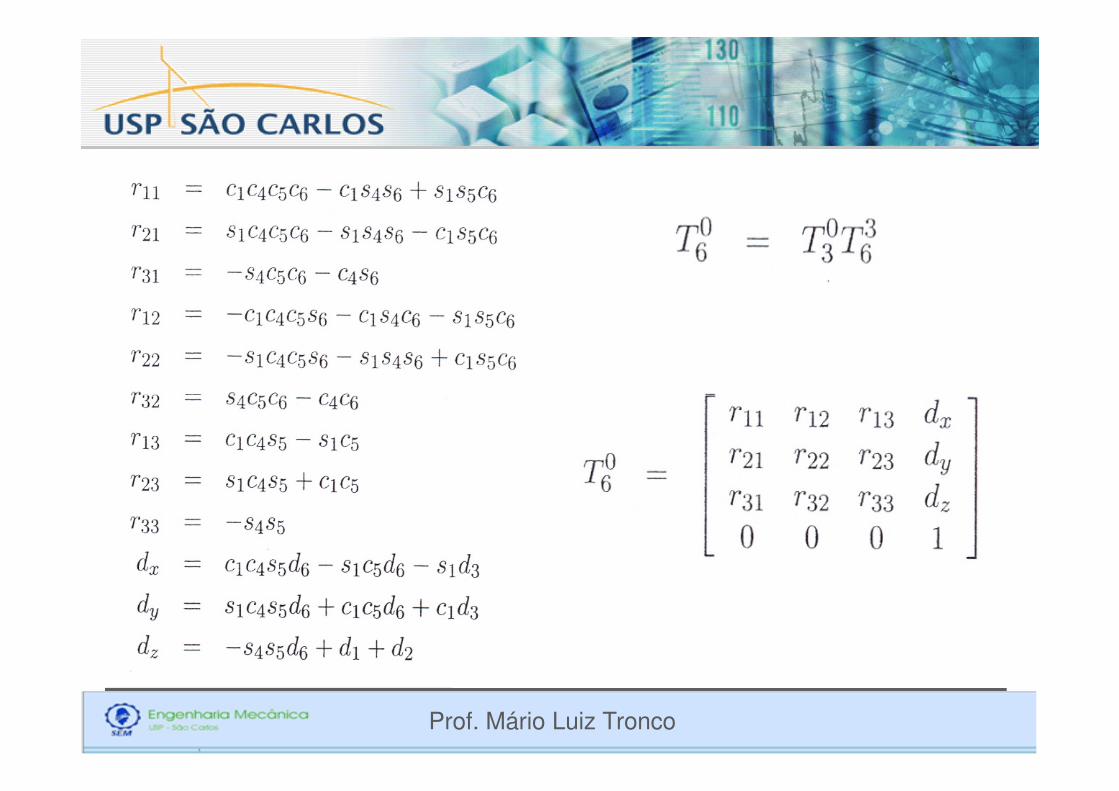
Esta relação pode ser expressa matematicamente pela matriz que
relaciona o sistema de coordenadas solidárias a base do robô com um
sistema de coordenadas associadas com o seu órgão terminal. Esta
matriz é chamada de matriz de passagem homogênea e é obtida a partir
do produto das matrizes de transformação, Ai, i-1, que relaciona o
sistema de coordenadas de um elemento i com o sistema de
coordenadas anterior i-1, isto é:
Mário Luiz TroncoProf. Mário Luiz Tronco
coordenadas anterior i-1, isto é:
Tn = A0.1*A1,2*........*An-1,n
Tn = [ n s a p ]
Tn = A0.1*A1,2*........*An-1,n
Tn = [ n s a p ]
onde
Mário Luiz TroncoProf. Mário Luiz Tronco
onde
p = [ px , py , pz ]: vetor posição e
n = [ nx ny nz ], s = [ sx sy sz ] e a = [ ax ay az ]: vetor ortonormal que
descreve a orientação.
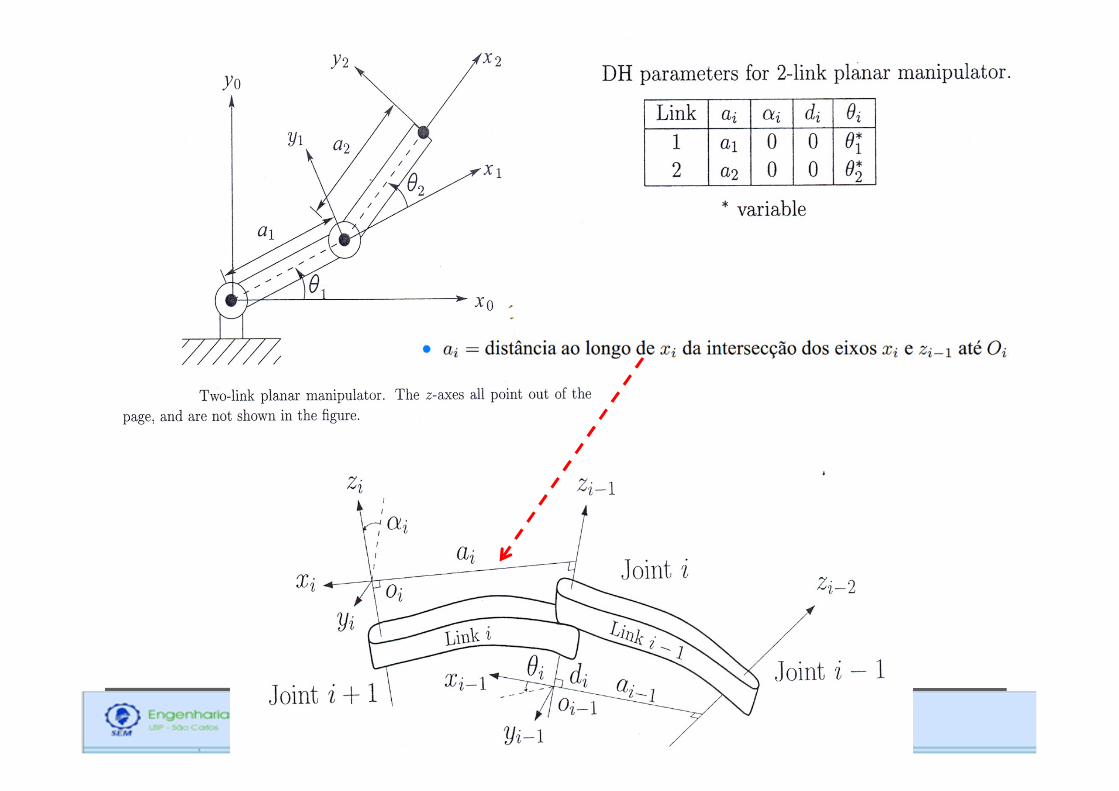
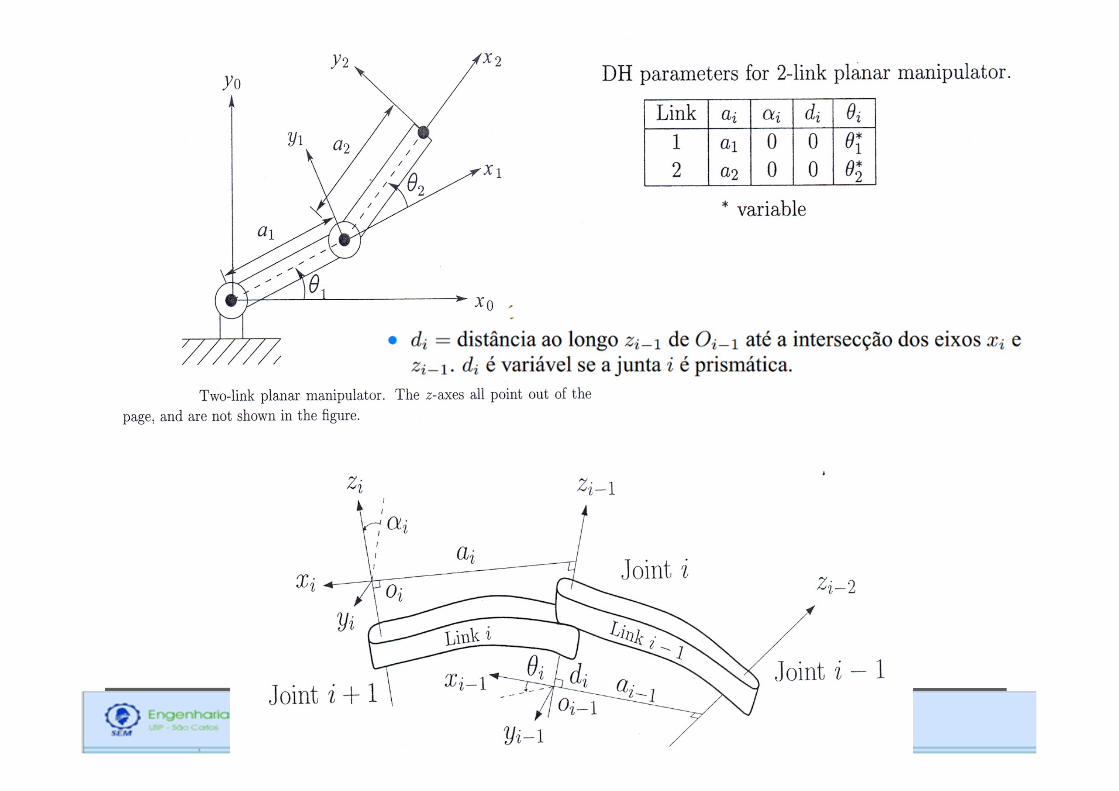
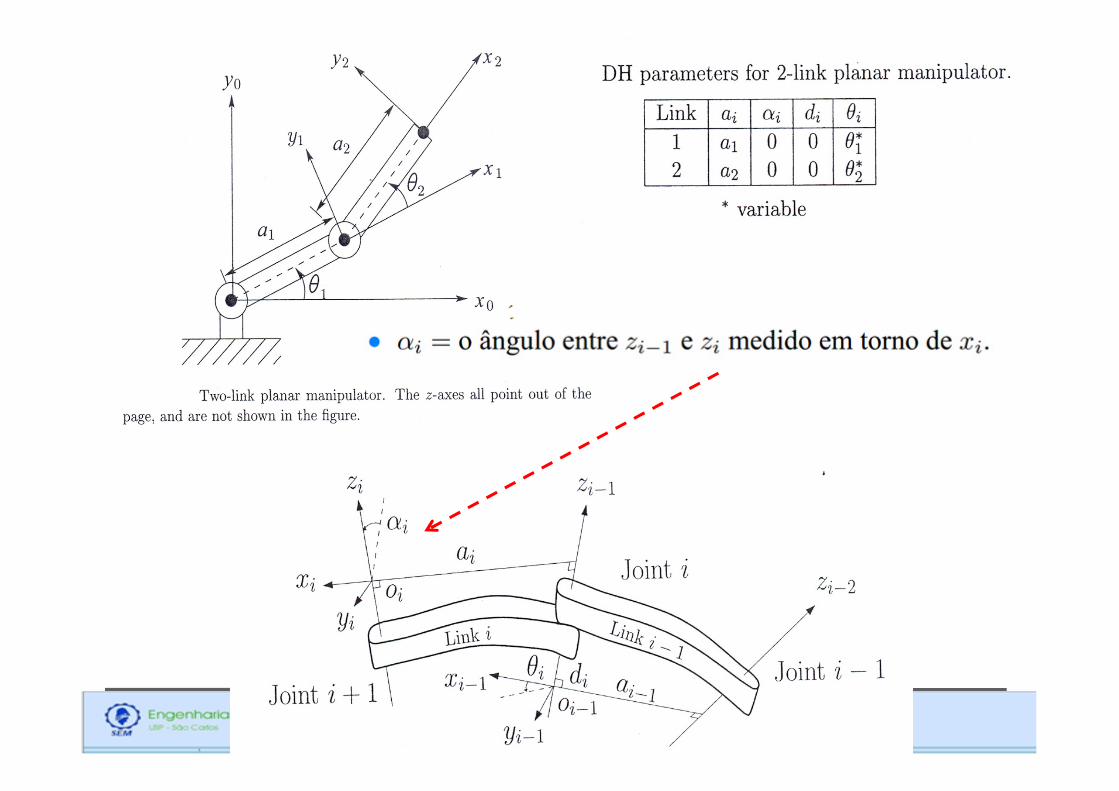
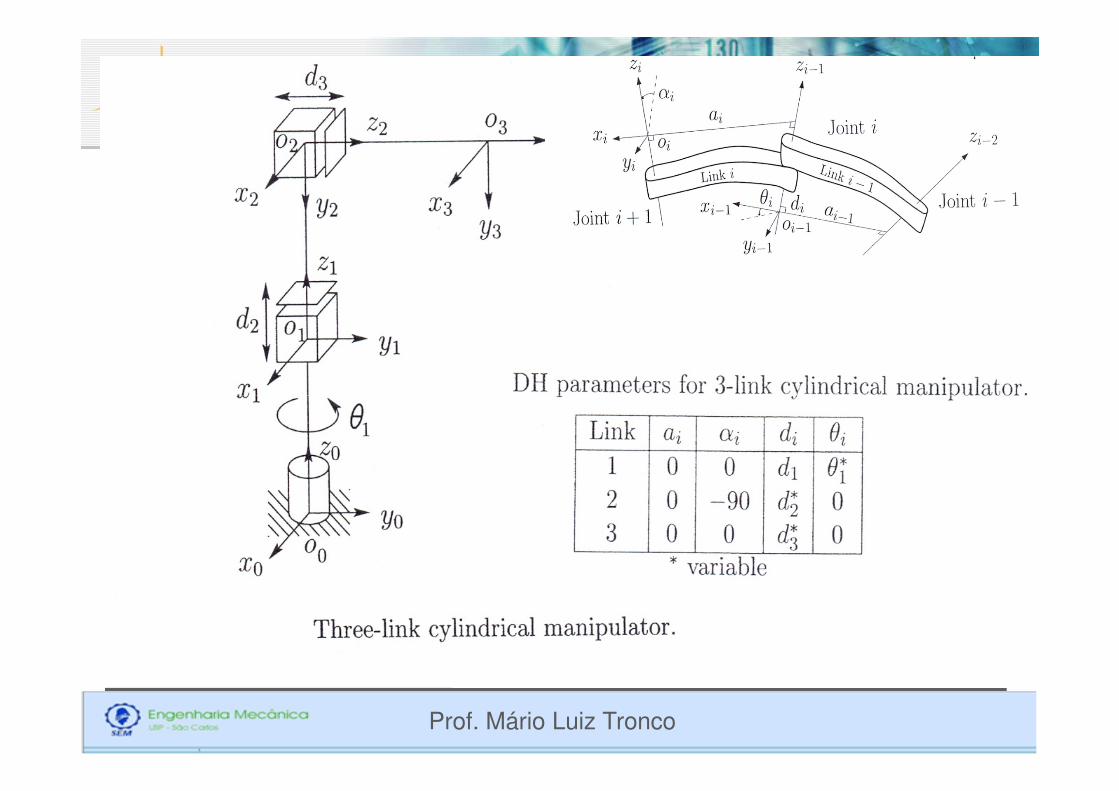
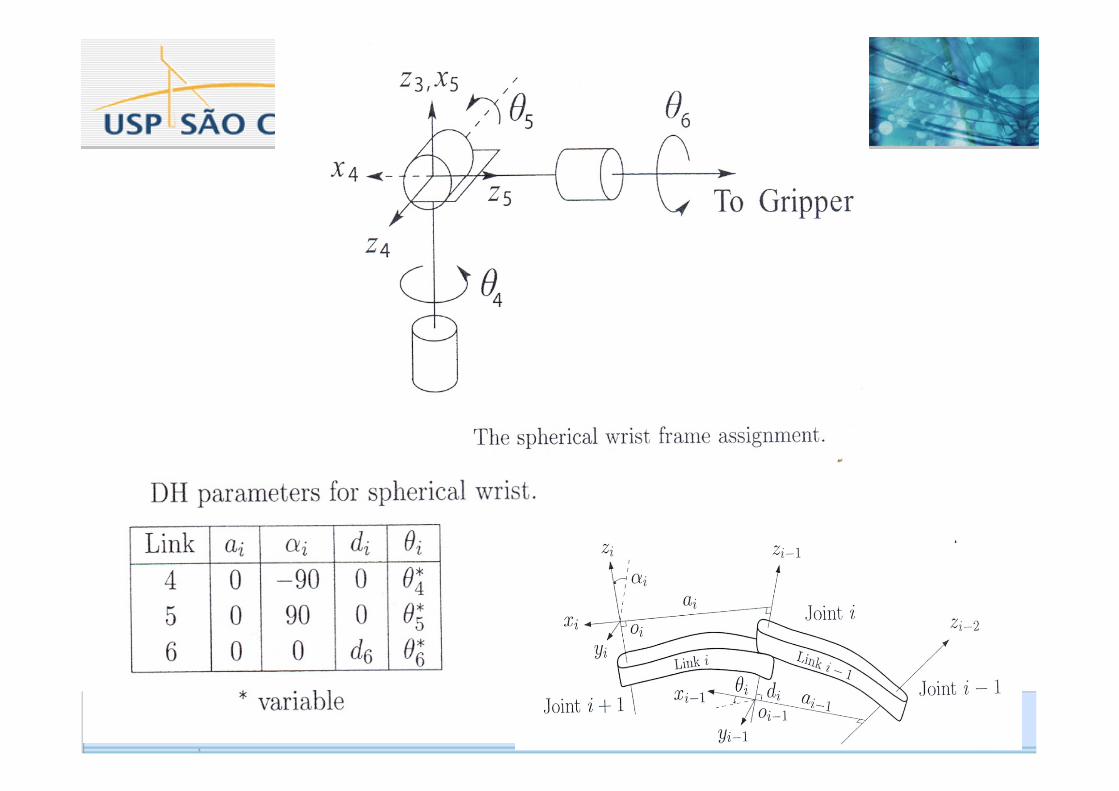
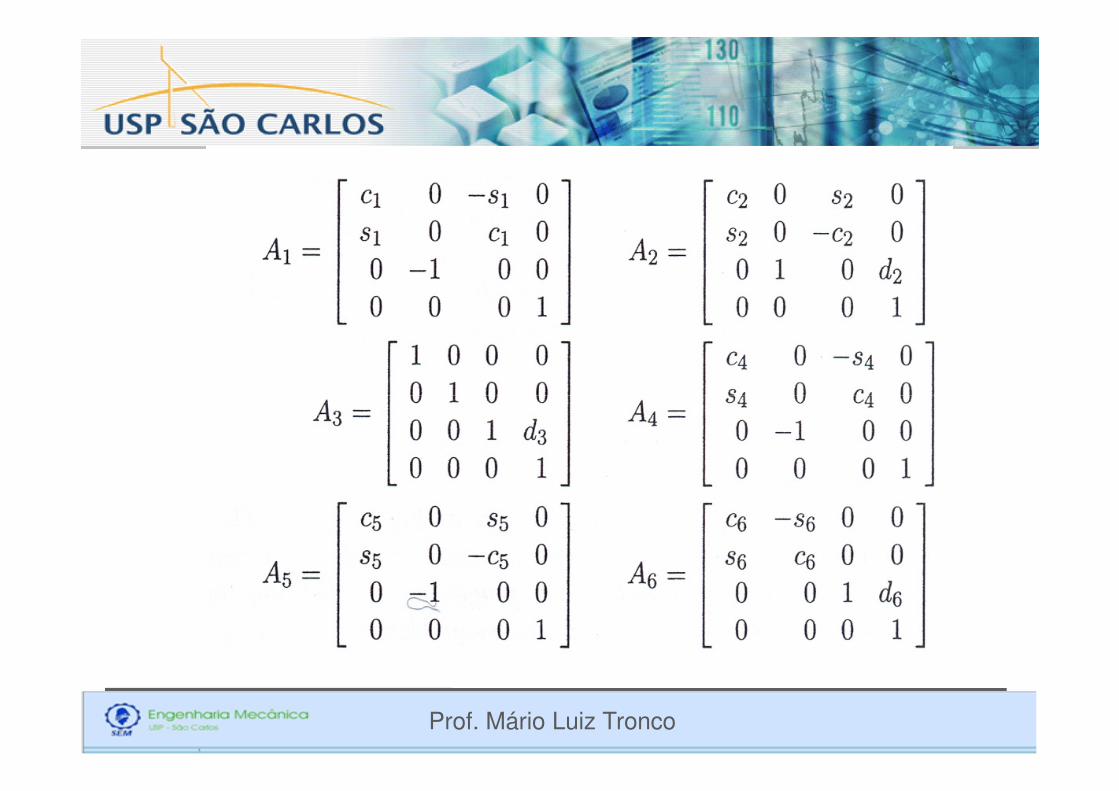
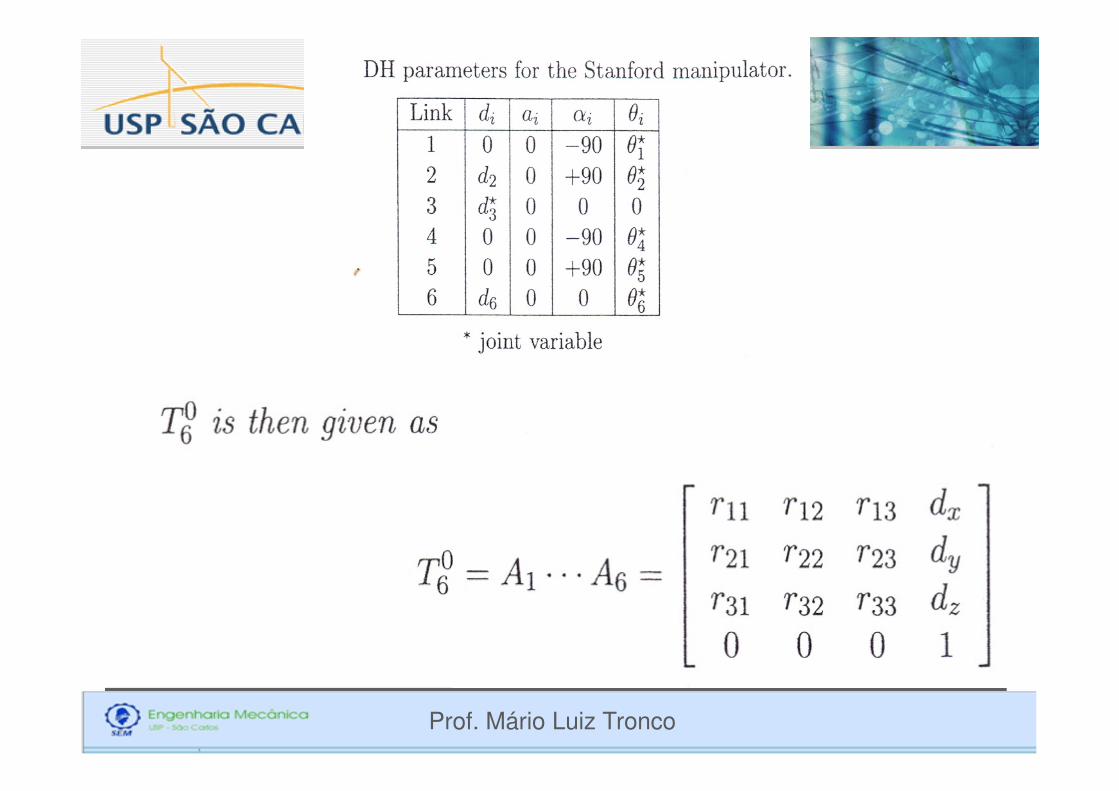
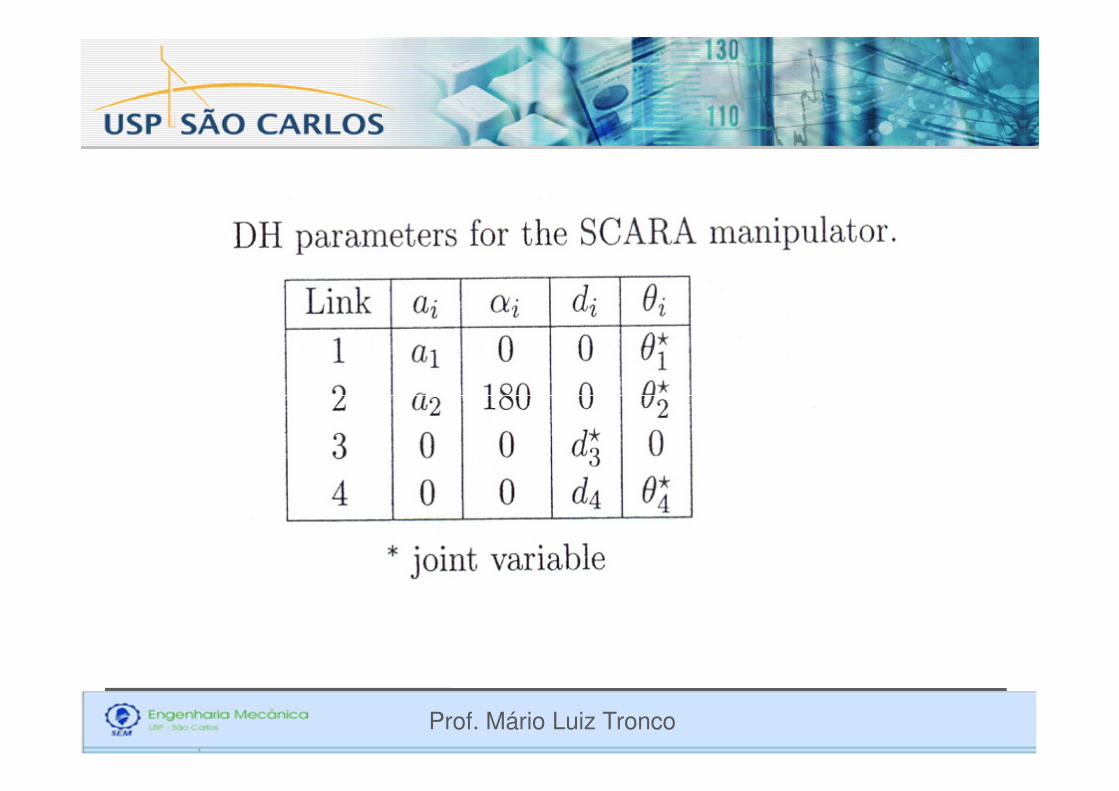
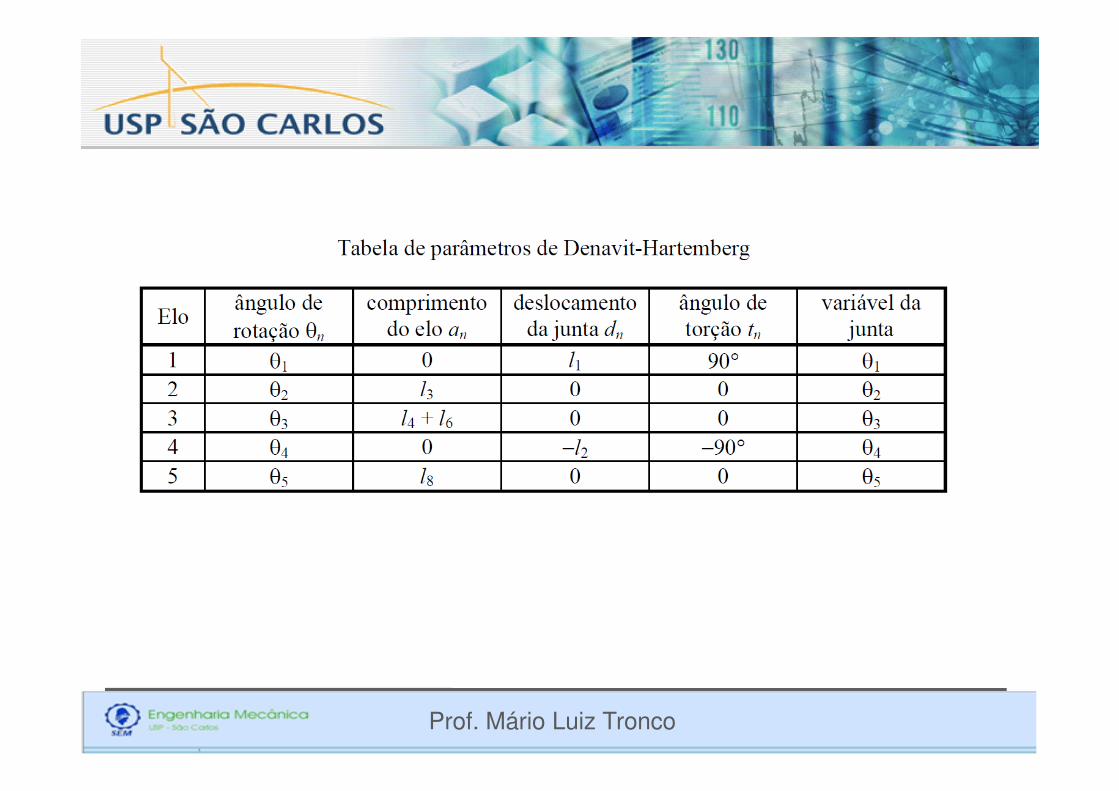
A descrição da matriz de transformação é normalmente realizada
utilizando a notação de Denavit-Hartenberg, após a obtenção dos
quatro parâmetros θi, ai, di e αi,, descritos a seguir.

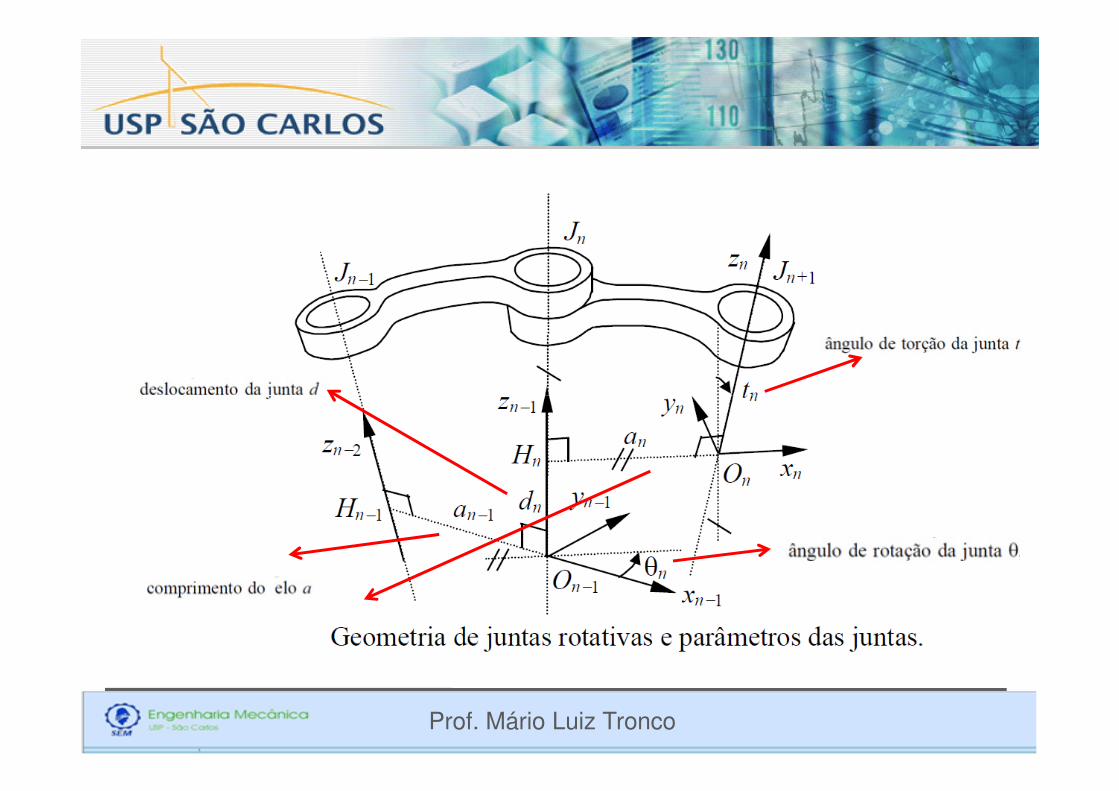
Parâmetros de Denavit-Hartenberg
Permitem obter o conjunto de equações que descrevem a
cinemática de uma junta com relação à junta seguinte na cadeia
cinemática, e vice-versa;
Mário Luiz TroncoProf. Mário Luiz Tronco
cinemática, e vice-versa;
Mário Luiz TroncoProf. Mário Luiz Tronco
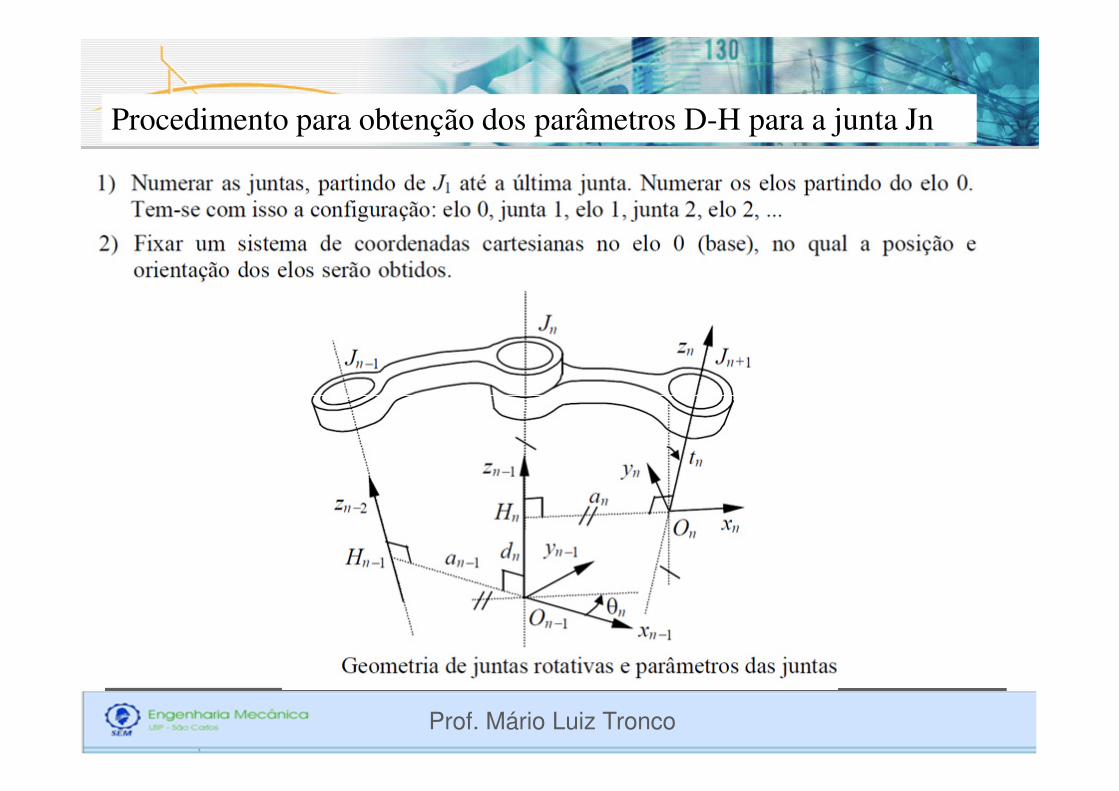
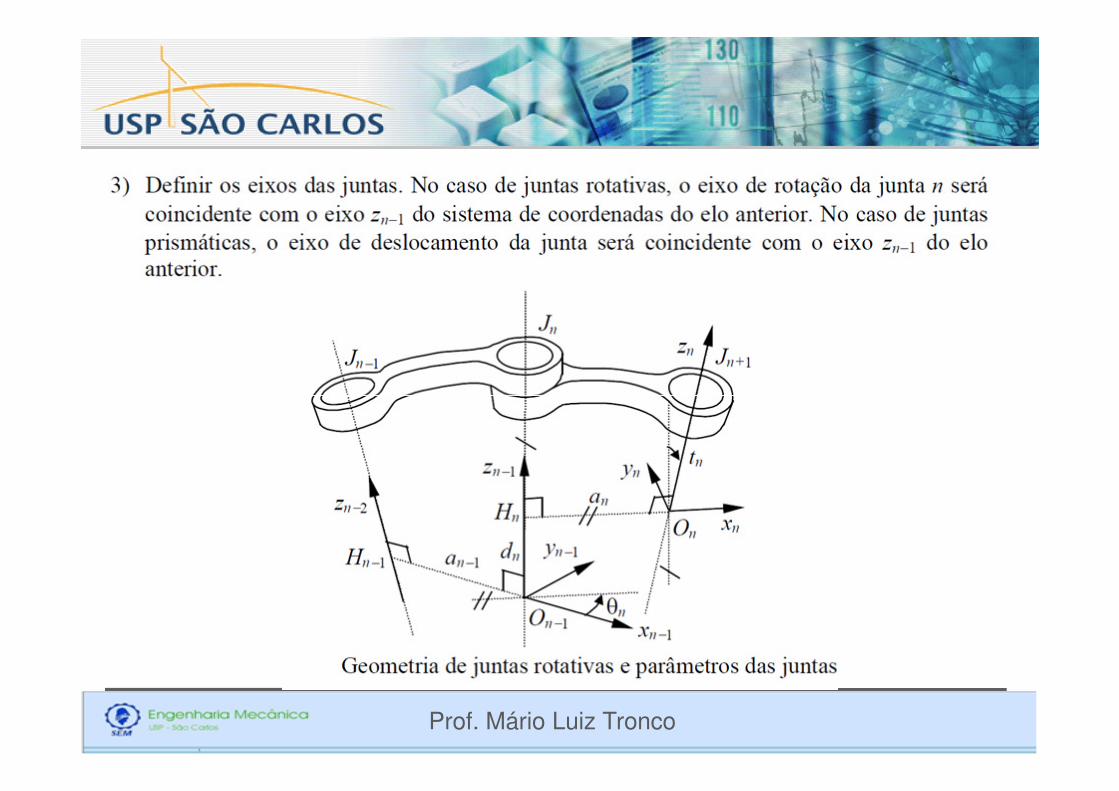
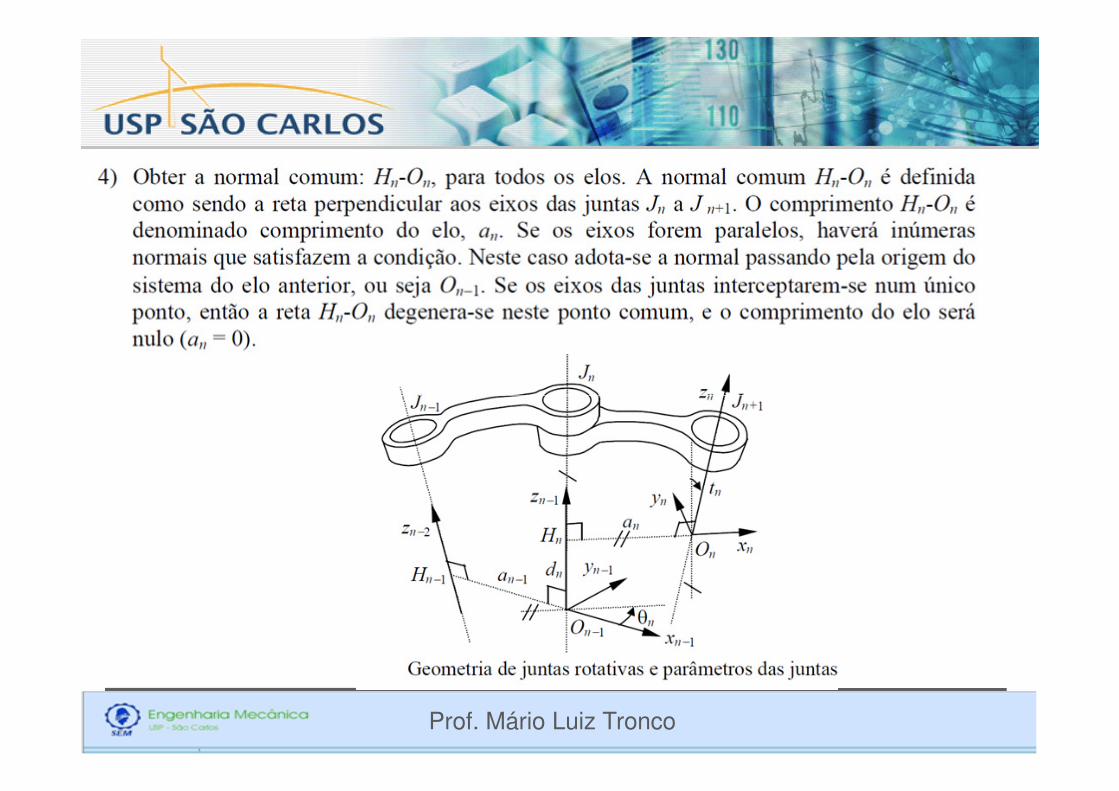
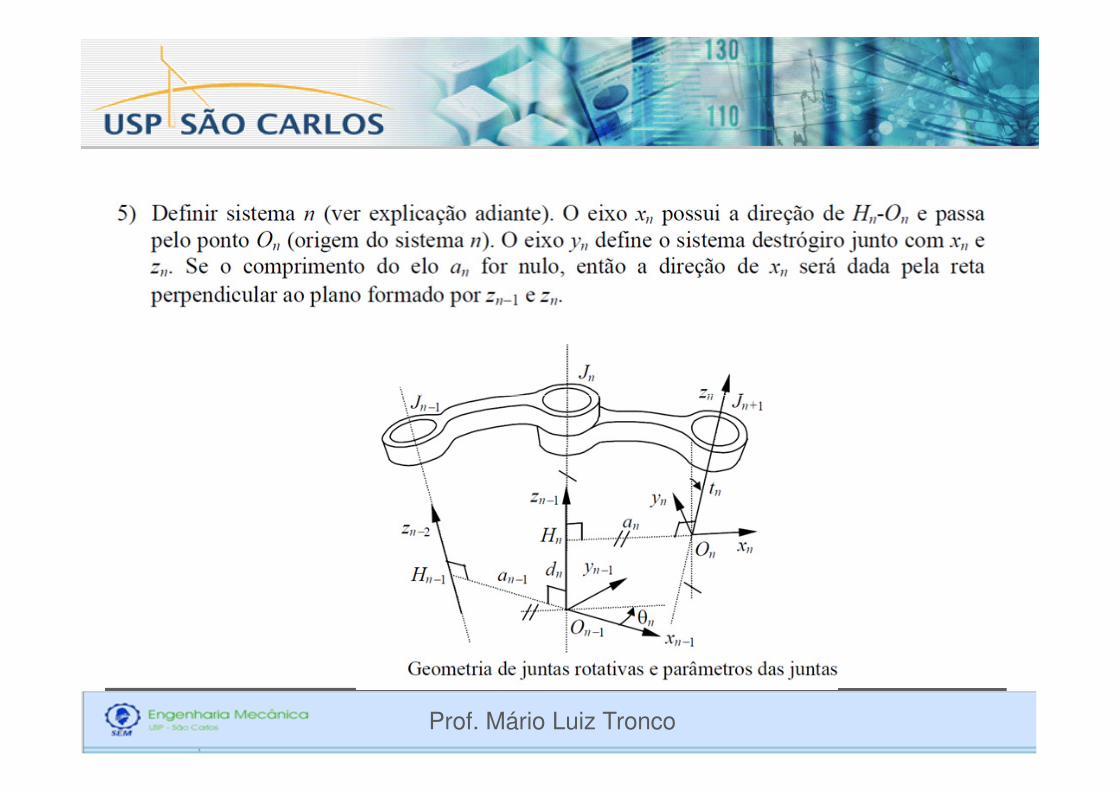
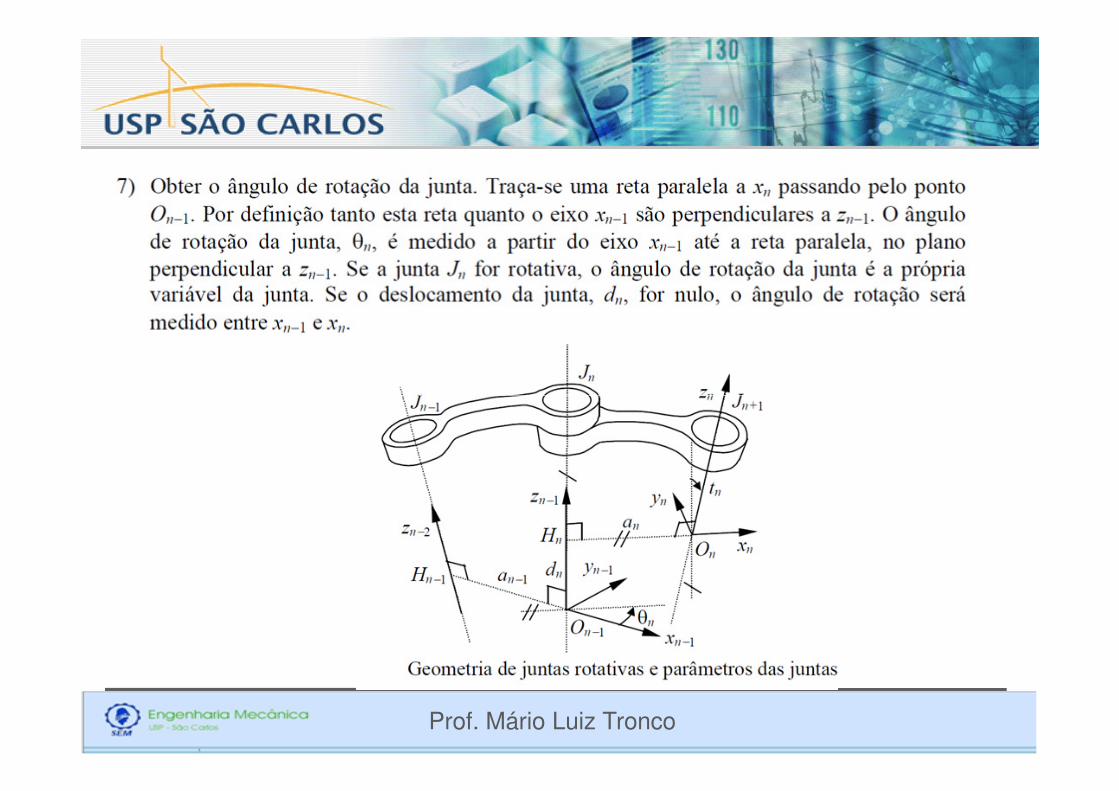
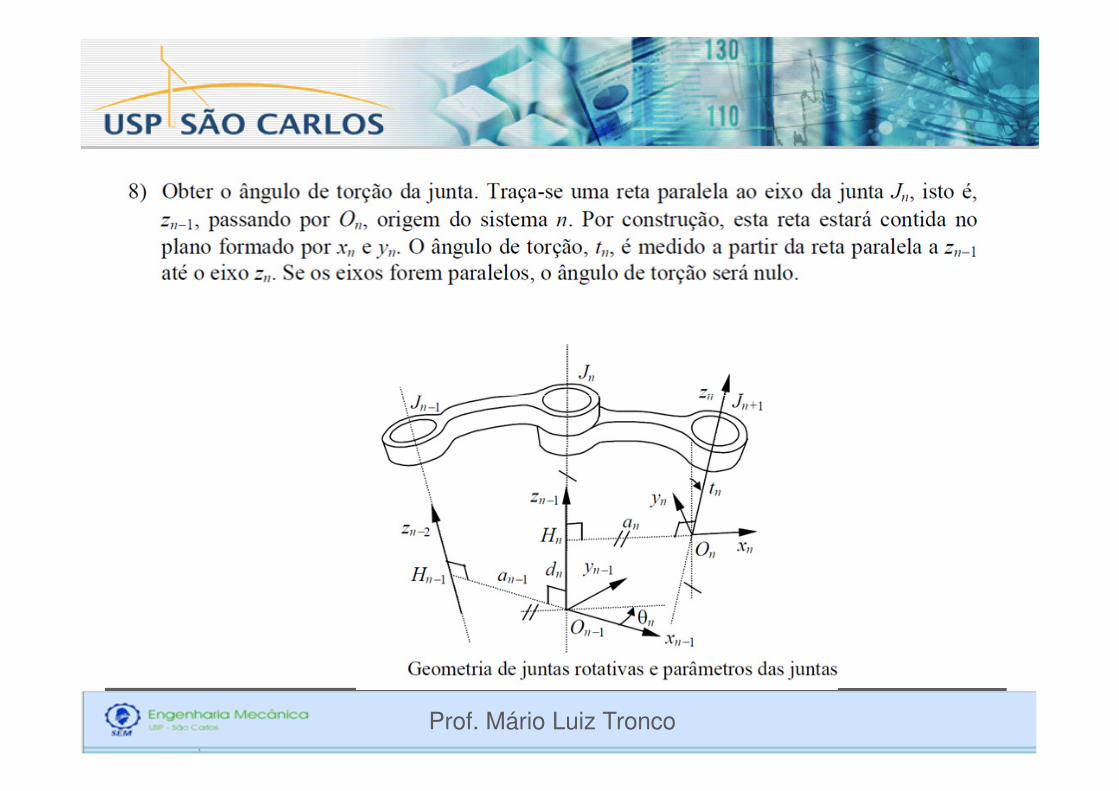
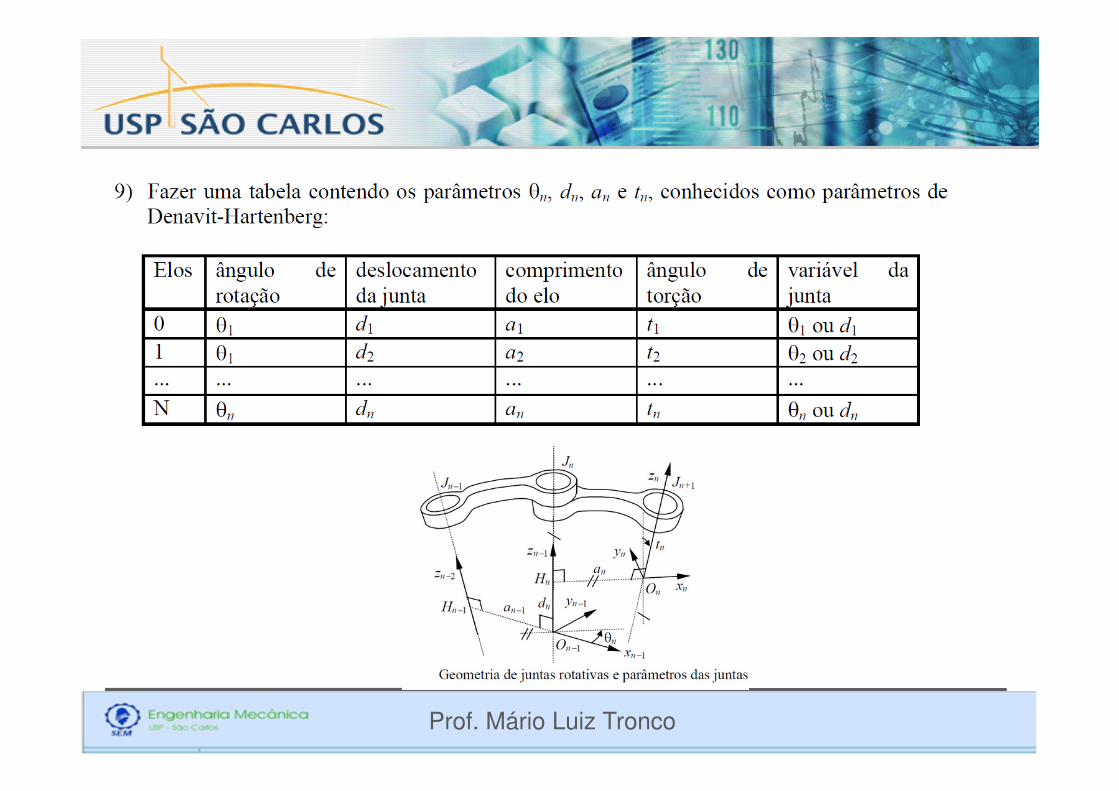
Procedimento para obtenção dos parâmetros D-H para a junta Jn
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco

Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco

Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco

Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco

Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco

Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco

Mário Luiz TroncoProf. Mário Luiz Tronco
Mário Luiz TroncoProf. Mário Luiz Tronco
Rotinas Matlab
Mário Luiz TroncoProf. Mário Luiz Tronco



![Aula 6 [Modo de Compatibilidade]de.ufpb.br/~luiz/CPEI/Aula6.pdf · Na realização de um fenômeno aleatório, é comum termos interesse em uma ou mais quantidades. Introdução Elas](https://static.fdocument.org/doc/165x107/5be5e47c09d3f2d8348c4e2c/aula-6-modo-de-compatibilidadedeufpbbrluizcpeiaula6pdf-na-realizacao.jpg)