Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016...
65
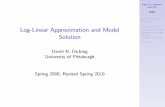
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary Model Reduction (Approximation) of Large-Scale Systems Overview of the model approximation methods Lecture 2 C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff EDSYS, April 4-7th, 2016 (Toulouse, France) more more Σ (A,B,C,D)i Σ ˆ Σ (ˆ A, ˆ B, ˆ C, ˆ D)i model reduction toolbox Kr(A, B) AP +PAT +BBT =0 WTV DAE/ODE State x(t) ∈Rn, n large or infinite Data Reduced DAE/ODE Reduced state ˆ x(t) ∈ Rr with r n (+) Simulation (+) Analysis (+) Control (+) Optimization Case 1 u(f)=[u(f1)...u(fi)] y(f)=[y(f1)...y(fi)] Case 2 E˙ x(t)=Ax(t)+Bu(t) y(t)=Cx(t)+Du(t) Case 3 H(s)=e-τs C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
Transcript of Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016...
![Page 1: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/1.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Model Reduction (Approximation) of Large-Scale Systems
Overview of the model approximation methodsLecture 2
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff
EDSYS, April 4-7th, 2016 (Toulouse, France)
moremoreΣ
(A,B,C,D)i
Σ
Σ
(A, B, C, D)i
model reduction toolbox
Kr(A,B)
AP + PAT + BBT = 0
WTV
DAE/ODE
State x(t) ∈ Rn, n large orinfinite
Data
ReducedDAE/ODE
Reduced state x(t) ∈ Rrwith r � n(+) Simulation(+) Analysis(+) Control(+) Optimization
Case 1u(f) = [u(f1) . . . u(fi)]y(f) = [y(f1) . . . y(fi)]
Case 2Ex(t) = Ax(t) +Bu(t)y(t) = Cx(t) +Du(t)
Case 3H(s) = e−τs
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 2: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/2.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
IntroductionModel approximation problem (realization-based framework)Realization based approximation methods overview
Introduction to the projection-based approachesDynamical systemsPetrov-Galerkin approximationProjectorsApproximation by projectionMismatch error measureThe projection-based framework
Projection-based methodsTruncationKrylov basic iterationProper Orthogonal Decomposition
Non-projection methodsStandard schemeSome LMI methodsSome LMI methodsVector fitting methods
Summary
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 3: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/3.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Outlines
IntroductionModel approximation problem (realization-based framework)Realization based approximation methods overview
Introduction to the projection-based approaches
Projection-based methods
Non-projection methods
Summary
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 4: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/4.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
IntroductionThe big picture
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
DAE/ODE
State x(t) ∈ Rn, n large orinfinite
Data
ReducedDAE/ODE
Reduced state x(t) ∈ Rrwith r � n(+) Simulation(+) Analysis(+) Control(+) Optimization
Case 1u(f) = [u(f1) . . . u(fi)]y(f) = [y(f1) . . . y(fi)]
Case 2Ex(t) = Ax(t) +Bu(t)y(t) = Cx(t) +Du(t)
Case 3H(s) = e−τs
![Page 5: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/5.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
IntroductionModel approximation problem
Let us consider H, a nu inputs, ny outputs linear dynamical system described by thecomplex-valued function of order n (n large or ∞)
H : C→ Cny×nu , (1)
the model approximation problem consists in finding H of order r � n
H : C→ Cny×nu , (2)
with a given realization e.g.
H :{
E ˙x(t) = Ax(t) + Bu(t)y(t) = Cx(t) + Du(t)
, (3)
that well reproduces the input-output behaviour of H.
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 6: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/6.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
IntroductionModel approximation problem (realization-based framework)
Let us consider H, a nu inputs, ny outputs linear dynamical system described by thecomplex-valued function of order n (n large or ∞)
H : C→ Cny×nu , (4)
with a given realization e.g.
H :{
Ex(t) = Ax(t) +Bu(t)y(t) = Cx(t) +Du(t) , (5)
the model approximation problem consists in finding H of order r � n
H : C→ Cny×nu , (6)
with a given realization e.g.
H :{
E ˙x(t) = Ax(t) + Bu(t)y(t) = Cx(t) + Du(t)
, (7)
that well reproduces the input-output behaviour of H.
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 7: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/7.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
IntroductionRealization based approximation methods overview
Realization-based ap-proximation methods
Non-projection methods
Linear systems• LMIs• Vector fitting• Subspace• Optimization (DARPO)
Projection-based methods
Linear systems (truncation)• SVD (BT, SPA)• Modal truncation (SDPA)• Hankel approximation (H)
Linear systems (iterative)• Rational interpolation (IRKA)• Tangential interpolation (ITIA)
Linear systems (mixed)• Krylov/SVD (ISRKA, ISTIA)• Krylov/Eigenvectors (IETIA)
Linear / Nonlinear systems• POD• Empirical Gramians
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 8: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/8.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Outlines
Introduction
Introduction to the projection-based approachesDynamical systemsPetrov-Galerkin approximationProjectorsApproximation by projectionMismatch error measureThe projection-based framework
Projection-based methods
Non-projection methods
Summary
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 9: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/9.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesDynamical systems
Given H(s), a nu inputs ny outputs, LTI dynamical complex-valued function matrix oforder n:
H(s) = C(sE −A)−1B +D ∈ Cny×nu (8)
with realization H : (E,A,B,C,D)
H :{
Ex(t) = Ax(t) +Bu(t)y(t) = Cx(t) +Du(t) (9)
with x(t) ∈ Rn, n� nu, ny .
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 10: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/10.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesPetrov-Galerkin approximation
Trajectory subspaceState trajectories of high fidelity models are contained in low dimensional subspaces
x(t) = x1(t)v1 + x2(t)v2 + . . . (10)
By denotingI V = [v1, v2, . . . , vr] ∈ Rn×r is a basis for V (span(V ) = V)I x(t) = [x1(t), x2(t), . . . , xr(t)]T ∈ Rr is the reduced state vector.I r the dimension of such subspace V
It comes that x(t) ≈ V x(t)
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 11: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/11.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesPetrov-Galerkin approximation
Trajectory subspaceState trajectories of high fidelity models are contained in low dimensional subspaces
x(t) = x1(t)v1 + x2(t)v2 + . . . (10)
By denotingI V = [v1, v2, . . . , vr] ∈ Rn×r is a basis for V (span(V ) = V)I x(t) = [x1(t), x2(t), . . . , xr(t)]T ∈ Rr is the reduced state vector.I r the dimension of such subspace V
It comes that x(t) ≈ V x(t)
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 12: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/12.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesPetrov-Galerkin approximation
I By setting x(t) ≈ V x(t) and span(V ) = V, the dynamical model becomes,
H :{
EV ˙x(t) = AV x(t) +Bu(t) + r(t)y(t) = CV x(t) +Du(t) (11)
The residual r(t) ∈ Rn accounts for the fact that V x(t) will not be an exactsolution to the dynamical equation.
I The residual r(t) is then constrained to be orthogonal to a subspace W ∈ Rn×r,where span(W ) =W, i.e.:
WT r(t) = 0 (12)
A projection method consists then in seeking for an approximation x(t) of x(t), byimposing the following two conditions:
x(t) ∈ V and(EV ˙x(t)−
(AV x(t) +Bu(t)
))⊥ W (13)
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 13: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/13.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesPetrov-Galerkin approximation
I By setting x(t) ≈ V x(t) and span(V ) = V, the dynamical model becomes,
H :{
EV ˙x(t) = AV x(t) +Bu(t) + r(t)y(t) = CV x(t) +Du(t) (11)
The residual r(t) ∈ Rn accounts for the fact that V x(t) will not be an exactsolution to the dynamical equation.
I The residual r(t) is then constrained to be orthogonal to a subspace W ∈ Rn×r,where span(W ) =W, i.e.:
WT r(t) = 0 (12)
A projection method consists then in seeking for an approximation x(t) of x(t), byimposing the following two conditions:
x(t) ∈ V and(EV ˙x(t)−
(AV x(t) +Bu(t)
))⊥ W (13)
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 14: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/14.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesPetrov-Galerkin approximation
I By setting x(t) ≈ V x(t) and span(V ) = V, the dynamical model becomes,
H :{
EV ˙x(t) = AV x(t) +Bu(t) + r(t)y(t) = CV x(t) +Du(t) (11)
The residual r(t) ∈ Rn accounts for the fact that V x(t) will not be an exactsolution to the dynamical equation.
I The residual r(t) is then constrained to be orthogonal to a subspace W ∈ Rn×r,where span(W ) =W, i.e.:
WT r(t) = 0 (12)
A projection method consists then in seeking for an approximation x(t) of x(t), byimposing the following two conditions:
x(t) ∈ V and(EV ˙x(t)−
(AV x(t) +Bu(t)
))⊥ W (13)
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 15: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/15.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesPetrov-Galerkin approximation
By settingx(t) ∈ V and EV ˙x(t)−
(AV x(t) +Bu(t)
)⊥ W (14)
or equivalently
x(t) ∈ V and WT(EV ˙x(t)−
(AV x(t) +Bu(t)
))= 0 (15)
One then obtains,
H :{
WTEV ˙x(t) = WTAV x(t) +WTBu(t) + 0y(t) = CV x(t) +Du(t) (16)
Moreover, the approximated full state vector can be reconstructed if needed as,
x(t) ≈ V x(t) (17)
This is known as the Petrov-Galerkin projection framework
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 16: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/16.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesProjectors
The unifying feature: projectionsLet V,W ∈ Rn×r, such that WTV = Ir, then Π = VWT is a projector.
Definition: ProjectorΠ is said to be a projector if and only if
Π2 = Π (18)
Then, we have Rn = Im(Π)⊕ ker(Π).
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 17: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/17.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesProjectors
Projector propertiesLet us consider a projector Π
I Eigenvalues of Π are only 0 and 1I Let r be the rank of Π, Then there exist a basis X, such that
Π = X
[Ir
0n−r
]X−1 (19)
I Let X = [X1 X2] such that X1 ∈ Rn×r and X2 ∈ Rn×(n−r), then ∀x ∈ Rn,
Πx ∈ span(X1) = Im(Π) = S1x−Πx ∈ span(X2) = ker(Π) = S2
(20)
I Π defines the projection onto S1, parallel to S2,
Rn = Im(Π)⊕ ker(Π) (21)
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 18: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/18.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesProjectors
Orthogonal projectorLet consider a projector Π
I S1 = S⊥2I Let V ∈ Rn×r be an orthogonal matrix, the orthogonal projection of x ∈ Rn
onto S1 is V V T xI The projection matrix is ΠV,V = V V T
I if x ∈ S1, then ΠV,V x = V V T x = x
I if x ⊥ S1, then ΠV,V x = V V T x = 0I ||x−Πx||2 = miny∈Im(Π) ||x− y||2
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 19: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/19.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesProjectors
Oblic projectorLet consider a projector Π Let consider a projector Π
I S1 6= S⊥2I Let V ∈ Rn×r and W ∈ Rn×r be full column rank matrices, spanning S1 andS⊥2 , the projection of x ∈ Rn onto subspace S1 parrallel to S2 isV (WTV )−1WT x
I The projection matrix is ΠV,W = V (WTV )−1WT
I if x ∈ S1, and x = V y, then ΠV,W x = V (WTV )−1WTV y = V y
I if x ⊥ S2, then ΠV,W x = V (WTV )−1WT x = 0
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 20: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/20.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesApproximation by projection
The general caseGiven H, a nu inputs ny outputs, full order nonlinear dynamical system (order n):
H :{
x(t) = f(x(t), u(t))y(t) = g(x(t), u(t)) (22)
by denoting x = WT x, then, the reduced model is
H :{ ˙x(t) = WT f(V x(t), u(t))
y(t) = g(V x(t), u(t)) (23)
with the reduced initial conditions:
x0 = WT x0 ∈ Rr (24)
and in the equivalent full state space initial conditions
V x0 = VWT x0 ∈ Rn (25)
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 21: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/21.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesApproximation by projection
The linear caseGiven H, a nu inputs ny outputs, full order LTI dynamical system (order n):
H :{
Ex(t) = Ax(t) +Bu(t)y(t) = Cx(t) +Du(t) (26)
by denoting x = WT x, then, the reduced model is
H :{
WTEV ˙x(t) = WTAV x(t) +WTBu(t)y(t) = CV x(t) +Du(t) (27)
with the reduced initial conditions:
x0 = WT x0 ∈ Rr (28)
and in the equivalent full state space initial conditions
V x0 = VWT x0 ∈ Rn (29)
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 22: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/22.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesApproximation by projection
Comments about V and W
Let us consider,
H :{
WTEV ˙x(t) = WTAV x(t) +WTBu(t)y(t) = CV x(t) +Du(t) (30)
x0 = WT x0 ∈ Rr (31)
LemmaChoosing two different bases V ′ and W ′ that respectively span the same subspaces Vand W result in the same reconstructed solution x(t).
Thus, subspaces are relevant, not basis
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 23: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/23.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesApproximation by projection
Comments about V and W
Let us consider,
H :{
WTEV ˙x(t) = WTAV x(t) +WTBu(t)y(t) = CV x(t) +Du(t) (30)
x0 = WT x0 ∈ Rr (31)
LemmaChoosing two different bases V ′ and W ′ that respectively span the same subspaces Vand W result in the same reconstructed solution x(t).
Thus, subspaces are relevant, not basis
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 24: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/24.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesApproximation by projection
ConsequencesI A reduced order model is uniquely defined by its projector ΠV,WI The projector ΠV,W is itself uniquely defined by the two subspaces
span(V ) = Vspan(W ) =W (32)
I V and W belong to the Grassmann manifold G(r, n): known as the set of allsubspaces of dimension r in Rn
Reduced Order Model ↔ (V,W)How to find V and W?
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 25: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/25.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesApproximation by projection
ConsequencesI A reduced order model is uniquely defined by its projector ΠV,WI The projector ΠV,W is itself uniquely defined by the two subspaces
span(V ) = Vspan(W ) =W (32)
I V and W belong to the Grassmann manifold G(r, n): known as the set of allsubspaces of dimension r in Rn
Reduced Order Model ↔ (V,W)How to find V and W?
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 26: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/26.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesMismatch error measure
H is a "good" approximation of H if E(t) = x(t)− V x(t) is "small".
Model error
H :
{Ex(t) = Ax(t) +Bu(t)E ˙x(t) = Ax(t) + Bu(t)e(t) = (Cx(t)− Cx(t)) + (D − D)u(t)
(33)
or, in the frequency domain, represented by its transfer function,
H(s) = H(s)−H(s) =[C −C
] [ sE −A 00 sE − A
]−1 [B
B
]+D−D ∈ Cny×nu
(34)
How to quantify? ... in practice?
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 27: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/27.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesMismatch error measure
H is a "good" approximation of H if E(t) = x(t)− V x(t) is "small".
Model error
H :
{Ex(t) = Ax(t) +Bu(t)E ˙x(t) = Ax(t) + Bu(t)e(t) = (Cx(t)− Cx(t)) + (D − D)u(t)
(33)
or, in the frequency domain, represented by its transfer function,
H(s) = H(s)−H(s) =[C −C
] [ sE −A 00 sE − A
]−1 [B
B
]+D−D ∈ Cny×nu
(34)
How to quantify? ... in practice?
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 28: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/28.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesThe projection-based framework
Let H : C→ Cny×nu be a nu inputs ny outputs, complex-valued function describinga LTI dynamical system as a DAE of order n, with realization H:
H :{
Ex(t) = Ax(t) +Bu(t)y(t) = Cx(t) (35)
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
E,A B
C
![Page 29: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/29.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesThe projection-based framework
Let H : C→ Cny×nu be a nu inputs ny outputs, complex-valued function describinga LTI dynamical system as a DAE of order n, with realization H:
H :{
Ex(t) = Ax(t) +Bu(t)y(t) = Cx(t) (35)
the approximation problem consists in finding V,W ∈ Rn×r (with r � n) spanning Vand W subspaces and forming a projector ΠV,W = VWT , such that
H :{
WTEV ˙x(t) = WTAV x(t) +WTBu(t)y(t) = CV x(t) (36)
well approximates H.
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
WTEV ,WTAV WTB
CV
ΠV,W =⇒C
E,A B
![Page 30: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/30.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Introduction to the projection-based approachesThe projection-based framework
Let H : C→ Cny×nu be a nu inputs ny outputs, complex-valued function describinga LTI dynamical system as a DAE of order n, with realization H:
H :{
Ex(t) = Ax(t) +Bu(t)y(t) = Cx(t) (35)
the approximation problem consists in finding V,W ∈ Rn×r (with r � n) spanning Vand W subspaces and forming a projector ΠV,W = VWT , such that
H :{
WTEV ˙x(t) = WTAV x(t) +WTBu(t)y(t) = CV x(t) (36)
well approximates H.
I Small approximation error and/or global error boundI Stability / passivity preservationI Numerically stable & efficient procedure
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 31: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/31.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Outlines
Introduction
Introduction to the projection-based approaches
Projection-based methodsTruncationKrylov basic iterationProper Orthogonal Decomposition
Non-projection methods
Summary
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 32: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/32.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Projection-based methodsApproximation methods: an overview
Realization-based ap-proximation methods
Non-projection methods
Linear systems• LMIs• Vector fitting• Complex optimization (DARPO)
Projection-based methods
Linear systems (truncation)• SVD (BT, SPA)• Modal truncation (SDPA)• Hankel approximation (H)
Linear systems (iterative)• Rational Interpolation (IRKA)• Tangential (ITIA)
Linear systems (mixed)• Krylov/SVD (ISRKA, ISTIA)• Krylov/Eigenvectors (IETIA)
Non linear systems• POD• Empirical Gramians
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 33: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/33.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Projection-based methodsTruncation
The ideaLet divide the realization as follows:
H⊥ =[A⊥ B⊥C⊥ D
]=
[A11 A12 B1A21 A22 B2C1 C2 D
]. (37)
The truncated reduced system is then (r first columns of V,W ),
H =[A11 B1C1 D
]=[WTr AVr WT
r BCVr D
](38)
Performing such a truncation as it is hopeless...One should choose an appropriate basis (subspace indeed)
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 34: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/34.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Projection-based methodsTruncation in the balanced realization
Balanced realizationLet H be a nu inputs ny outputs, nth order model. Its balanced realization H⊥ isobtained as follows,
H⊥ =[A⊥ B⊥C⊥ D
]=[WTAV WTBCV D
](39)
where V,W ∈ Rn×n are defined as:
V = UZΣ−1/2 and W = LY Σ−1/2 (40)
with P = UUT and Q = LLT are the solutions of the two Lyapunov equations andUTL = ZΣY T .
I 2 Lyapunov equations to solve:
P = Q = Σ = diag(σ1, . . . , σn) where σi =√λ(PQ) (41)
I States are sorted by decreasing energy
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 35: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/35.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Projection-based methodsTruncation in the balanced realization
Consequence...
H⊥ =
[A11 A12 B1A21 A22 B2C1 C2 D
](42)
In that case,Σ =
[Σ1 00 Σ2
](43)
The system is said to be "balanced", and the most reachable and most observable statesare kept, only.
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 36: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/36.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Projection-based methodsTruncation in the modal realization
Modal realizationLet H be a nu inputs ny outputs, full order LTI system (order n). Its modal realizationH⊥ is obtained as follows,
H⊥ =[A⊥ B⊥C⊥ D
]=
Λ︷ ︸︸ ︷WTAV WTBCV D
(44)
where V,W ∈ Rn×n are defined as:
AV = ΛVWA = ΛW (45)
I 2 eigenvalue problems to solveI States are sorted by user-defined eigensorting/selecting strategyI Eigenvalues are kept
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 37: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/37.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Projection-based methodsTruncation in the modal realization
Consequences...In that case,
H =
[A11 0 B1
0 A22 B2C1 C2 D
](46)
where A11 and A22 corresponds to (block) diagonal matrices with the eigenvalues ofthe original system. The modal approximation consists then in truncating the undesired
modes and then in finding B1 and C1, by a mean of a bi-convex procedure, in order toreduce a given norm.
{B1, C1} = argmin ||H − C1(sIn −A11)−1B1 +D||Hl(47)
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 38: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/38.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Projection-based methodsBrief conclusions
√Stability preserved
√Global error bound (balanced case)
||H− H||H∞ ≤ 2(σk+1 + · · ·+ σn) (48)√
Efficient functions available in MATLAB, SLICOT & LYAPACK√
Possibility to extend to weighted, BR, PR SVD factorizationI Local results may be unsatisfactory× Dense computations, matrix factorizations and inversions may be ill-conditioned× Need whole transformed system in order to truncate× Require a lot of memory and operations O(n3)× Solution of 2 Lyapunov equations (hard for very large-scale systems)× Solution of 2 eigenvalue problems
Well adapted to medium-scale systems but not very large ones(unless approximate Lyapunov or eigenvalue)
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 39: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/39.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Projection-based methodsApproximation methods: an overview
Realization-based ap-proximation methods
Non-projection methods
Linear systems• LMIs• Vector fitting• Complex optimization (DARPO)
Projection-based methods
Linear systems (truncation)• SVD (BT, SPA)• Modal truncation (SDPA)• Hankel approximation (H)
Linear systems (iterative)• Rational Interpolation (IRKA)• Tangential (ITIA)
Linear systems (mixed)• Krylov/SVD (ISRKA, ISTIA)• Krylov/Eigenvectors (IETIA)
Non linear systems• POD• Empirical Gramians
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 40: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/40.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Projection-based methodsKrylov basic iteration
The very basic Krylov iterationGiven A ∈ Rn×n and b ∈ Rn, let v1 = b
||b|| , at the kth step of the procedure:
AVk = VkHk + fkeTk (49)
whereI ek ∈ Rn is the canonical unit vectorI Vk = [v1, v2, . . . , vk] ∈ Rk×k, and V Tk Vk = Ik (i.e. is orthogonal)I Hk = V Tk AVk ∈ R
k×k
I vk+1 = fk||fk||
∈ Rn
Note that,I Computational complexity for k steps is O(n2k) and storage is O(nk).I With Arnoldi, Hk is upper Hessenberg (interesting in computational analysis).I With Lanczos, Hk is tridiagonal (interesting in computational analysis).
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 41: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/41.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Projection-based methodsKrylov basic iteration - 3 use of the Krylov iteration
1. Iterative solution of Ax = b: approximate the solution x iteratively.2. Iterative approximation of the eigenvalues of A. In this case b is not fixed a priori.
The eigenvalues of the projected Hr approximate the dominant eigenvalues of A.3. Approximation of linear systems by moment matching.
Aleksey Nikolaevich Krylov (August 15 1863 - October 26, 1945) was aRussian naval engineer, applied mathematician and memoirist.In 1931 he published a paper on what is now called the Krylov subspaceand Krylov subspace methods. The paper deals with eigenvalueproblems, namely, with computation of the characteristic polynomialcoefficients of a given matrix. Krylov was concerned with efficientcomputations and, as a computational scientist, he counts the work as anumber of separate numerical multiplications; something not verytypical for a 1931 mathematical paper. Krylov begins with a carefulcomparison of the existing methods that include the worst-case-scenarioestimate of the computational work in the Jacobi method. Later, hepresents his own method which is superior to the known methods ofthat time and is still widely used. [Source Wikipedia]
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 42: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/42.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Projection-based methodsKrylov basic iteration - Approximation by moment matching
Given H, expand the transfer function around σ
H(s)|σ = η0 + η1(s− σ) + η2(s− σ)2 + . . . (50)
and given H ∈ R(r+nu)×(r+ny), similarly expanded around σ as,
H(s)|σ = η0 + η1(s− σ) + η2(s− σ)2 + . . . (51)
verify,ηi = ηi , ∀i ∈ 1 . . . r at σ (52)
I Problem: Moments are numerically hard to compute (ill conditioned).I Solution: It is possible to achieve moment matching without explicitly computing
them, through the introduction of the Krylov subspaces.
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 43: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/43.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Projection-based methodsKrylov basic iteration - Projectors for Krylov and rational Krylov 1
Given, Π = VWT ,
H =[E,A BC D
]obtain H =
[E, A B
C D
]=[WTEV ,WTAV WTB
CV D
](53)
Krylov (E = In)
span(V ) = [B,AB, . . . , Ak−1B] ∈ Rn×k
span(WT ) = [CT , ATCT , . . . , A(k−1)TCT ]T ∈ Rk×n(54)
then Markovian parameters (impulse response) match:
ηi = H(∞) = CAiB = CAiB = H(∞) = ηi (55)
1 W. E. Arnoldi, "The principle of minimized iterations in the solution of the matrix eigenvalue problem",Quart. Appl. Math., 9, 1951, pp. 17-29.
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 44: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/44.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Projection-based methodsKrylov basic iteration - Projectors for Krylov and rational Krylov
Given, Π = VWT ,
H =[E,A BC D
]obtain H =
[E, A B
C D
]=[WTEV ,WTAV WTB
CV D
](56)
Rational Krylov
span(V ) = [(σ1E −A)−1B, . . . (σkE −A)−1B] ∈ Cn×k
span(WT ) = [(σk+1E −A)−TCT , . . . (σ2kE −A)−TCT ]T ∈ Ck×n(57)
then the moments of H(s) match those of H(s) at σi:
H(σi) = D + C(σiE −A)−1B = D + C(σiE − A)−1B = H(σi) (58)
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 45: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/45.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Projection-based methodsBrief conclusions
√Numerically efficient, only matrix-vector multiplications are required (no matrixfactorizations and/or inversion)
√No Lyapunov equation
√Fast computation (no need to compute transformed model and then truncate).O(kn2) or O(k2n) vs. O(n3)
√Applicability to very large-scale systems (e.g. 108 states)
√Possibility to focus on specific poles
√Available numerical tools in MORE
× No global error bound× Stability not always preserved (but mechanisms exist)? How to select the shift points
Well adapted to very large-scale systems
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 46: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/46.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Projection-based methodsApproximation methods: an overview
Realization-based ap-proximation methods
Non-projection methods
Linear systems• LMIs• Vector fitting• Complex optimization (DARPO)
Projection-based methods
Linear systems (truncation)• SVD (BT, SPA)• Modal truncation (SDPA)• Hankel approximation (H)
Linear systems (iterative)• Rational Interpolation (IRKA)• Tangential (ITIA)
Linear systems (mixed)• Krylov/SVD (ISRKA, ISTIA)• Krylov/Eigenvectors (IETIA)
Non linear systems• POD• Empirical Gramians
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 47: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/47.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Projection-based methodsProper Orthogonal Decomposition
State snapshotLet,
X = [x(t1), x(t2), . . . , x(tN )] ∈ Rn×N (59)
Then, apply SVD as follows
X = UΣV T ≈ UrΣrV Tk (60)
The, approximate the state as
x(t) = UTr x(t) , x(t) ≈ Urx(t), (61)
where x(t) ∈ Rr. Then project the reduced order system is as:
H :{ ˙x(t) = UTr f(Urx(t), u(t))
y(t) = g(Urx(t), u(t)) (62)
Choice of the snapshots?Singular values non input/output invariant...
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 48: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/48.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Projection-based methodsBrief conclusions
√Stability preserved
√Applicable to nonlinear systems
× Dense computations, matrix factorizations and inversions may be ill-conditioned× Need to simulate the system in order to truncate× Require a lot of memory and operations (at least O(n3))
Well adapted to non-linear systems(but not very large ones, unless with good SVD solver)
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 49: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/49.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Outlines
Introduction
Introduction to the projection-based approaches
Projection-based methods
Non-projection methodsStandard schemeSome LMI methodsSome LMI methodsVector fitting methods
Summary
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 50: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/50.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Non-projection methods
Realization-based ap-proximation methods
Non-projection methods
Linear systems• LMIs• Vector fitting• Complex optimization (DARPO)
Projection-based methods
Linear systems (truncation)• SVD (BT, SPA)• Modal truncation (SDPA)• Hankel approximation (H)
Linear systems (iterative)• Rational Interpolation (IRKA)• Tangential (ITIA)
Linear systems (mixed)• Krylov/SVD (ISRKA, ISTIA)• Krylov/Eigenvectors (IETIA)
Non linear systems• POD• Empirical Gramians
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 51: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/51.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Non-projection methodsStandard scheme
Optimization criteria and parametrizationThe model reduction problem consists in (l defines a norm),
(A, B, C, D) := argmin(A,B,C,D)∈Rx×y
||H −G||Hl(63)
or (N(jω), D(jω)
):= argmin
N(jω),D(jω) polynomial||H(jω)−G(jω)||l (64)
or any other model parametrization
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 52: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/52.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Non-projection methodsStandard scheme
Optimization schemeI Select a criteria J (preferably a system norm)I Define a parametrization of the model (State-space, Pole residue...)I Derive the gradient ∇JI Derive the Hessian ∇2JI Apply a descent algorithm
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 53: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/53.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Non-projection methodsSome LMI methods
Classical ideaGiven the error system,
H :=[A B
C D
]=
[A 0 B
0 A B
C −C D − D
](65)
Find the reduced order model that minimizes theH∞ (orH2 ) norm of the error systemsH. The BRL case: min γ∞, s.t. P > 0 and[
ATP + PA PB CT
BTP −γ2∞I DT
C D −I
]< 0 (66)
Not LMI, hence non solvable is such form ⇒ conservatism is introduced
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 54: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/54.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Non-projection methodsSome LMI methods2
Split the Lyapunov matrix P as follows: ATP11 + P11A (?)T (?)T (?)TATP12 + P12TA ATP22 + P22A (?)T (?)TBTP11 − BTP12T BTP12 − BP22 −γ∞Ip (?)T
C C D − D −γ∞Im
< 0
P =[P11 P12PT12 P22
]> 0
(67)
. . . and iterate1: while ε < γn − γn+1 do2: Fix (A, B)3: min γ∞, subject to LMI with respect to P , C, D4: Fix (P12, P22)5: min γ∞, subject to LMI with respect to P11, A, B, C, D6: γn+1 = γ∞7: end while
2 Helmersson, "Model Reduction using LMIs", in Proceedings of the Conference Decision and Control,Lake Buena Vista, Florida, December 1994, 3217-3222.
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 55: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/55.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Non-projection methodsSome LMI methods
Classical ideaGiven the error system,
H :=[A B
C D
]=
[A 0 B
0 A B
C −C D − D
](68)
Find the reduced order model that minimizes theH∞ (orH2 ) norm of the error systemsH. The BRL case: min γ∞, s.t. P > 0 and[
ATP + PA PB CT
BTP −γ2∞I DT
C D −I
]< 0 (69)
Not LMI, hence non solvable is such form ⇒ conservatism is introduced
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 56: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/56.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Non-projection methodsBrief conclusions
√Stability preserved
√Global bound
√Easily implementable in MATLAB, YALMIP + SDP solver (e.g. SeDuMi)
× Extended system formulation× Conservatism of the relaxation (or iterative algorithm)× SDP solver limitations (# variable & time!)× Lyapunov function (quadratic increase)
Not adapted to very large-scale systems(can reasonably solve problem of order n=30)
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 57: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/57.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Non-projection methodsVector fitting methods
(An) Algorithm1: Sample original system H frequency response magnitude:
‖H(jω)‖ , {ω0, . . . , ωi} (70)
2: Define H(jω) (of order r) as:
H(s) =brsr + br−1sr−1 + · · ·+ b0
arsr + ar−1sr−1 + · · ·+ a0
or H(s) =brsr + br−1sr−1 + · · ·+ b0∏
i( s2wi
2s+ 2mi
wi+ 1)
∏j
( swj
+ 1)
(71)
3: Nonlinear fitting
min[bi,ai,wi,mi]
N∑i=0
(H(jωi)− H(jωi)
)2(72)
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 58: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/58.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Vector fitting methodsBrief conclusions
√Stability can be preserved
√Handles "bounded" damping and dynamic coefficients
√Quite easily implementable in MATLAB (e.g. lsqcurvefit)
√Very engineering appealing
× Frequency gridding implies complexity (choice of the grid)× Applicability to MIMO× Nonlinear solver limitations (# variable, initial vector & time!)× Problem when state space form are preferred× Usually far to be optimal
Not adapted to very large-scale systems
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 59: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/59.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Outlines
Introduction
Introduction to the projection-based approaches
Projection-based methods
Non-projection methods
Summary
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 60: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/60.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
SummaryLecture’s highlights
About this lectureI Norm and classical Linear Algebra reminderI Control engineer point of view: SVD methodsI Numerical engineer point of view: Krylov methodsI Both well adapted to model reductionI Bottlenecks of both methods have to be handled with kind attentionI LMI and vector optimization based approaches not adapted (unless for very low
dimensional models)
Raising questionsI Efficiency, optimalityI Computing (parallel)I Numerical issues
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 61: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/61.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
SummaryApproximation methods: an overview
Realization-based ap-proximation methods
Non-projection methods
Linear systems• LMIs• Vector fitting• Subspace• Optimization (DARPO)
Projection-based methods
Linear systems (truncation)• SVD (BT, SPA)• Modal truncation (SDPA)• Hankel approximation (H)
Linear systems (iterative)• Rational interpolation (IRKA)• Tangential interpolation (ITIA)
Linear systems (mixed)• Krylov/SVD (ISRKA, ISTIA)• Krylov/Eigenvectors (IETIA)
Linear / Nonlinear systems• POD• Empirical Gramians
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 62: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/62.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
SummaryApproximation methods: an overview and solvers...
Realization-based ap-proximation methods
Modalmethods
Linear systems• Eigenvalues & Residue• Dominant modes
SVD/Lyapmethods
Linear systems• Balanced truncation• Hankel approximation
Non linear systems• POD• Empirical Gramians
Krylovmethods
Linear systems• Arnoldi/Lanczos• Rational Interpolation
Optimizationmethods
Linear systems• DARPO• Vector fitting
Mixedmethods
Linear systems• Krylov/SVD• Krylov/Eigenvectors
• Numerical efficiency• Stability
• Stability• Error bound• n ≈ 103
• Numerical efficiency• n� 103
• Matching points• Optimality
• Numerical efficiency• Identification from data
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 63: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/63.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
SummaryApproximation methods: an overview and solvers...
Realization-based ap-proximation methods
Modalmethods
Linear systems• Eigenvalues & Residue• Dominant modes
SVD/Lyapmethods
Linear systems• Balanced truncation• Hankel approximation
Non linear systems• POD• Empirical Gramians
Krylovmethods
Linear systems• Arnoldi/Lanczos• Rational Interpolation
Optimizationmethods
Linear systems• DARPO• Vector fitting
Mixedmethods
Linear systems• Krylov/SVD• Krylov/Eigenvectors
• Numerical efficiency• Stability
• Stability• Error bound• n ≈ 103
• Numerical efficiency• n� 103
• Matching points• Optimality
• Numerical efficiency• Identification from data
• MATLAB• SLICOT and LyaPack• J. Rommes tools• M.E.S.S (under development)• MORPack (works with ANSYS)• MOREMBS
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 64: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/64.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
SummaryApproximation methods: an overview and solvers...
Realization-based ap-proximation methods
Modalmethods
Linear systems• Eigenvalues & Residue• Dominant modes
SVD/Lyapmethods
Linear systems• Balanced truncation• Hankel approximation
Non linear systems• POD• Empirical Gramians
Krylovmethods
Linear systems• Arnoldi/Lanczos• Rational Interpolation
Optimizationmethods
Linear systems• DARPO• Vector fitting
Mixedmethods
Linear systems• Krylov/SVD• Krylov/Eigenvectors
• Numerical efficiency• Stability
• Stability• Error bound• n ≈ 103
• Numerical efficiency• n� 103
• Matching points• Optimality
• Numerical efficiency• Identification from data
moremoreΣ
(A,B,C,D)i
Σ
Σ
(A, B, C, D)i
model reduction toolbox
Kr(A,B)
AP + PAT + BBT = 0
WTV
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems
![Page 65: Model Reduction (Approximation) of Large-Scale …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 02... · C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems](https://reader043.fdocument.org/reader043/viewer/2022031015/5b99395709d3f29c338b87c0/html5/page/65.jpg)
Introduction Introduction to the projection-based approaches Projection-based methods Non-projection methods Summary
Model Reduction (Approximation) of Large-Scale Systems
Overview of the model approximation methodsLecture 2
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff
EDSYS, April 4-7th, 2016 (Toulouse, France)
moremoreΣ
(A,B,C,D)i
Σ
Σ
(A, B, C, D)i
model reduction toolbox
Kr(A,B)
AP + PAT + BBT = 0
WTV
DAE/ODE
State x(t) ∈ Rn, n large orinfinite
Data
ReducedDAE/ODE
Reduced state x(t) ∈ Rrwith r � n(+) Simulation(+) Analysis(+) Control(+) Optimization
Case 1u(f) = [u(f1) . . . u(fi)]y(f) = [y(f1) . . . y(fi)]
Case 2Ex(t) = Ax(t) +Bu(t)y(t) = Cx(t) +Du(t)
Case 3H(s) = e−τs
C. Poussot-Vassal, P. Vuillemin & I. Pontes Duff [Onera - DCSD] Model Reduction (Approximation) of Large-Scale Systems











![T =0 Loewner framework Lecture 8 - Hébergement …w3.onera.fr/more/sites/w3.onera.fr.more/files/2016 - lecture 08... · Loewner framework Lecture 8 ... C.Poussot-Vassal,P.Vuillemin&I.PontesDuff[Onera-DCSD]ModelReduction(Approximation)ofLarge-ScaleSystems.](https://static.fdocument.org/doc/165x107/5b99395709d3f29c338b87cc/t-0-loewner-framework-lecture-8-hebergement-w3onerafrmoresitesw3onerafrmorefiles2016.jpg)