Physical Properties of Amino Acids and Prediction of Secondary

Introduction Model Free Prediction Model Free Control
usepackagexcolor
Model Free Prediction and Control
Clément Rambour
Clément Rambour Model Free Prediction and Control 1 / 44

Introduction Model Free Prediction Model Free Control
Plan
1 Introduction
2 Model Free PredictionMonte Carlo samplingTD0 LearningTD(λ) Learning
3 Model Free ControlIntroductionOn policy et SARSAOff policy et Q-learning
Clément Rambour Model Free Prediction and Control 2 / 44

Introduction Model Free Prediction Model Free Control
Plan
1 Introduction
2 Model Free PredictionMonte Carlo samplingTD0 LearningTD(λ) Learning
3 Model Free ControlIntroductionOn policy et SARSAOff policy et Q-learning
Clément Rambour Model Free Prediction and Control 3 / 44

Introduction Model Free Prediction Model Free Control
Table of Contents
1 Introduction
2 Model Free PredictionMonte Carlo samplingTD0 LearningTD(λ) Learning
3 Model Free ControlIntroductionOn policy et SARSAOff policy et Q-learning
Clément Rambour Model Free Prediction and Control 4 / 44

Introduction Model Free Prediction Model Free Control
Échantillonnage de Monte Carlo
ButApprendre vπ d’après les épisodes vécus en suivant π :
S1, A1, R1, · · · , sk ∼ π
La fonction de valeur d’un état vπ est donnée par :
vπ(s) = Eπ[Gt|St = s]
avec Gt = Rt+1 + γRt+2 + · · ·+ γT−1RT
Monte CarloSimplest way to estimate the value → mean of the returns
Clément Rambour Model Free Prediction and Control 5 / 44

Introduction Model Free Prediction Model Free Control
Échantillonnage de Monte Carlo
ButApprendre vπ d’après les épisodes vécus en suivant π :
S1, A1, R1, · · · , sk ∼ π
La fonction de valeur d’un état vπ est donnée par :
vπ(s) = Eπ[Gt|St = s]
avec Gt = Rt+1 + γRt+2 + · · ·+ γT−1RT
Monte CarloSimplest way to estimate the value → mean of the returns
Clément Rambour Model Free Prediction and Control 5 / 44

Introduction Model Free Prediction Model Free Control
Échantillonnage de Monte Carlo
First Visit Monte-Carlo Policy Evaluation
v̂π(s) =S(s)
N(s)
N(s) : compteur incrémenté si s est vu au moins une fois dansun épisodeS(s)← S(s) +Gt : retour total pour l’état s
Clément Rambour Model Free Prediction and Control 6 / 44

Introduction Model Free Prediction Model Free Control
Échantillonnage de Monte Carlo
Every Visit Monte-Carlo Policy Evaluation
v̂π(s) =S(s)
N(s)
N(s) : compteur incrémenté à chaque fois que s est vu dans unépisodeS(s)← S(s) +Gt : retour total pour l’état s
Clément Rambour Model Free Prediction and Control 7 / 44

Introduction Model Free Prediction Model Free Control
Moyenne incrémentielle
µk =1
k
k∑j=1
xj
=1
k
(xk +
k−1∑j=1
xj)
=1
k(xk + (k − 1)µk−1)
= µk−1 +1
k(xk − µk−1)
V (s) est mis a jour après chaqueépisode :foreach St do
N(St)← N(St) + 1 Vπ(St)←V (St) +
1N(St)
(Gt − V (St))
end
En cas de non stationnarité, lamoyenne peut être mise à jour ie. lepoids des anciens épisodes → 0 :
Vπ(St)← V (St) + α(Gt − V (St))
α << 1
Clément Rambour Model Free Prediction and Control 8 / 44

Introduction Model Free Prediction Model Free Control
Moyenne incrémentielle
µk =1
k
k∑j=1
xj
=1
k
(xk +
k−1∑j=1
xj)
=1
k(xk + (k − 1)µk−1)
= µk−1 +1
k(xk − µk−1)
V (s) est mis a jour après chaqueépisode :foreach St do
N(St)← N(St) + 1 Vπ(St)←V (St) +
1N(St)
(Gt − V (St))
end
En cas de non stationnarité, lamoyenne peut être mise à jour ie. lepoids des anciens épisodes → 0 :
Vπ(St)← V (St) + α(Gt − V (St))
α << 1
Clément Rambour Model Free Prediction and Control 8 / 44

Introduction Model Free Prediction Model Free Control
Moyenne incrémentielle
µk =1
k
k∑j=1
xj
=1
k
(xk +
k−1∑j=1
xj)
=1
k(xk + (k − 1)µk−1)
= µk−1 +1
k(xk − µk−1)
V (s) est mis a jour après chaqueépisode :foreach St do
N(St)← N(St) + 1 Vπ(St)←V (St) +
1N(St)
(Gt − V (St))
end
En cas de non stationnarité, lamoyenne peut être mise à jour ie. lepoids des anciens épisodes → 0 :
Vπ(St)← V (St) + α(Gt − V (St))
α << 1
Clément Rambour Model Free Prediction and Control 8 / 44

Introduction Model Free Prediction Model Free Control
Monte Carlo prediction : pros and cons
pros
IntuitifFacile à implémenterSans biais
ConsNe peut être mis à jour qu’après un épisode complet ie. ne peutpas être utilisé onlineLong à converger
Clément Rambour Model Free Prediction and Control 9 / 44

Introduction Model Free Prediction Model Free Control
Table of Contents
1 Introduction
2 Model Free PredictionMonte Carlo samplingTD0 LearningTD(λ) Learning
3 Model Free ControlIntroductionOn policy et SARSAOff policy et Q-learning
Clément Rambour Model Free Prediction and Control 10 / 44

Introduction Model Free Prediction Model Free Control
De Monte Carlo à TD(0)
Monte CarloMise à jour basée sur le retour Gt :
vπ(St)← v(St) + α(Gt − v(St))
Offline
TD(0)
D’après les équations de Bellman :
vπ(s) = E[Rt+1 + vπ(St+1)|St = s]
Clément Rambour Model Free Prediction and Control 11 / 44

Introduction Model Free Prediction Model Free Control
De Monte Carlo à TD(0)
Monte CarloMise à jour basée sur le retour Gt :
vπ(St)← v(St) + α(Gt − v(St))
Offline
TD(0)
D’après les équations de Bellman :
vπ(s) = E[Rt+1 + vπ(St+1)|St = s]
Mise à jour basée sur le retour estimé Rt+1 + γvπ(St+1) :
vπ(St)← vπ(St) + α(Rt+1 + γvπ(St+1)− vπ(St))
Online
Clément Rambour Model Free Prediction and Control 11 / 44

Introduction Model Free Prediction Model Free Control
De Monte Carlo à TD(0)
Monte CarloMise à jour basée sur le retour Gt :
vπ(St)← v(St) + α(Gt − v(St))
Offline
TD(0)
D’après les équations de Bellman :
vπ(s) = E[Rt+1 + vπ(St+1)|St = s]
vπ(St)← vπ(St) + α(Rt+1 + γvπ(St+1)︸ ︷︷ ︸TD Target
−vπ(St)
︸ ︷︷ ︸TD Error = δt
)
Clément Rambour Model Free Prediction and Control 11 / 44

Introduction Model Free Prediction Model Free Control
Temporal Difference
TD(0)
Intuition : Estimation de la valeur basée sur la connaissance de l’étatsuivant
Vπ(St)← Vπ(St) + α(Rt+1 + γVπ(St+1)− Vπ(St))
Généralisation : n-stepGénéralisation possible en se basant sur les n état suivants.
Clément Rambour Model Free Prediction and Control 12 / 44

Introduction Model Free Prediction Model Free Control
Temporal Difference
TD(0)
Intuition : Estimation de la valeur basée sur la connaissance de l’étatsuivant
Vπ(St)← Vπ(St) + α(Rt+1 + γVπ(St+1)− Vπ(St))
Généralisation : n-stepGénéralisation possible en se basant sur les n état suivants.
D’après les équations de Bellman :
G(n)t = Rt+1 + γRt+2 + · · ·+ γnvπ(St+n)
Mise à jour de la valeur :
Vπ(SSt)← Vπ(St) + α(G
(n)t − Vπ(St))
Clément Rambour Model Free Prediction and Control 12 / 44

Introduction Model Free Prediction Model Free Control
Temporal Difference
TD(0)
Intuition : Estimation de la valeur basée sur la connaissance de l’étatsuivant
Vπ(St)← Vπ(St) + α(Rt+1 + γVπ(St+1)− Vπ(St))
Généralisation : n-stepGénéralisation possible en se basant sur les n état suivants.
Équivalent à Monte-Carlo pour n→∞Nécessite de stocker n récompenses et valeurs d’état
Clément Rambour Model Free Prediction and Control 12 / 44

Introduction Model Free Prediction Model Free Control
Exemple
Clément Rambour Model Free Prediction and Control 13 / 44

Introduction Model Free Prediction Model Free Control
Exemple : MC vs TD
Clément Rambour Model Free Prediction and Control 14 / 44

Introduction Model Free Prediction Model Free Control
Exemple : MC vs TD
Clément Rambour Model Free Prediction and Control 15 / 44

Introduction Model Free Prediction Model Free Control
Exemple : MC vs TD
Clément Rambour Model Free Prediction and Control 16 / 44

Introduction Model Free Prediction Model Free Control
Exemple : MC vs TD
Clément Rambour Model Free Prediction and Control 17 / 44

Introduction Model Free Prediction Model Free Control
MC vs TD
batch-MC converge vers la solution correspondant aux moindrecarrésBatch TD(0) converge vers le maximum de vraisemblanced’après la dynamique du modèle conditionné par la politique
Clément Rambour Model Free Prediction and Control 18 / 44

Introduction Model Free Prediction Model Free Control
Table of Contents
1 Introduction
2 Model Free PredictionMonte Carlo samplingTD0 LearningTD(λ) Learning
3 Model Free ControlIntroductionOn policy et SARSAOff policy et Q-learning
Clément Rambour Model Free Prediction and Control 19 / 44

Introduction Model Free Prediction Model Free Control
TD(λ)
TD(λ)
Utilisation de toutes les approximation du retour :
Gλt = (1− λ)∞∑n=1
λn−1G(n)t
(forward-view) TD(λ) :
Vπ(St)→ Vπ(st) + α(Gλt − Vπ(St)
)Nécessite des épisodes complets (comme MC)offline
Peut être approché online (backward-view)
Clément Rambour Model Free Prediction and Control 20 / 44

Introduction Model Free Prediction Model Free Control
TD(λ)
TD(λ)
Utilisation de toutes les approximation du retour :
Gλt = (1− λ)∞∑n=1
λn−1G(n)t
(forward-view) TD(λ) :
Vπ(St)→ Vπ(st) + α(Gλt − Vπ(St)
)Nécessite des épisodes complets (comme MC)offlinePeut être approché online (backward-view)
Clément Rambour Model Free Prediction and Control 20 / 44

Introduction Model Free Prediction Model Free Control
Eligibility traces
Plutôt que de regarder les n états suivants, on peut regarder lesn états précédentsPondération donnée par l’éligibilité des états observées
Éligibilité
Mise à jour basée sur les états récents et fréquents :
E0(s) = 0
Et(s) = γλEt−1(s) + 1St=s
Clément Rambour Model Free Prediction and Control 21 / 44

Introduction Model Free Prediction Model Free Control
Backward view TD(λ)
Éligibilité calculée pour chaque étatMise à jour de tous les états à chaque itérationL’erreur TS δt est pondéré par l’éligibilité
δt = Rt+1 + γV (St+1)− V (St)
V (St)← V (St) + αδEt(St)
Clément Rambour Model Free Prediction and Control 22 / 44

Introduction Model Free Prediction Model Free Control
Plan
1 Introduction
2 Model Free PredictionMonte Carlo samplingTD0 LearningTD(λ) Learning
3 Model Free ControlIntroductionOn policy et SARSAOff policy et Q-learning
Clément Rambour Model Free Prediction and Control 23 / 44

Introduction Model Free Prediction Model Free Control
Table of Contents
1 Introduction
2 Model Free PredictionMonte Carlo samplingTD0 LearningTD(λ) Learning
3 Model Free ControlIntroductionOn policy et SARSAOff policy et Q-learning
Clément Rambour Model Free Prediction and Control 24 / 44

Introduction Model Free Prediction Model Free Control
Model Free Control
Précédemment (programmation dynamique), l’améliorationgreedy de la politique se fait selon la fonction de valeur d’état :
πk+1(s) = argmaxa∈A
qπ(s, a)
→ on choisit les action qui amèneront aux meilleurs étatsNécessité de stocker la valeur de chaque état vπ(s)
Sans connaître la dynamique du modèle, on ne sait pas quelssont les états atteignables→ Nécessité de stocker la valeur de chaque couple (action-état)qπ(s, a)
Clément Rambour Model Free Prediction and Control 25 / 44

Introduction Model Free Prediction Model Free Control
Model Free Control
Précédemment (programmation dynamique), l’améliorationgreedy de la politique se fait selon la fonction de valeur d’état :
πk+1(s) = argmaxa∈A
qπ(s, a)
→ on choisit les action qui amèneront aux meilleurs étatsNécessité de stocker la valeur de chaque état vπ(s)
Sans connaître la dynamique du modèle, on ne sait pas quelssont les états atteignables→ Nécessité de stocker la valeur de chaque couple (action-état)qπ(s, a)
Clément Rambour Model Free Prediction and Control 25 / 44

Introduction Model Free Prediction Model Free Control
Generalized policy iteration
Même principe qu’enprogrammationdynamiqueAlternance :
Estimation de qπAmélioration greedyde la politique
Clément Rambour Model Free Prediction and Control 26 / 44

Introduction Model Free Prediction Model Free Control
GLIE
Condition suffisante pour la convergence vers qπ∗
DéfinitionUn processus d’amélioration de politique est dit Greedy in the Limitwith Infinite Exploration (GLIE) si
Tous les états-action sont explorés infiniments :
limk←∞
Nk(s, a) =∞
La politique converge vers une politique greedy :
limk←∞
πk(a|s) = 1argmaxa∈A
qk(s,a)
Par exemple : un apprentissage ε-greedy est GLIE si εk = 1k
Clément Rambour Model Free Prediction and Control 27 / 44

Introduction Model Free Prediction Model Free Control
GLIE
Condition suffisante pour la convergence vers qπ∗
DéfinitionUn processus d’amélioration de politique est dit Greedy in the Limitwith Infinite Exploration (GLIE) si
Tous les états-action sont explorés infiniments :
limk←∞
Nk(s, a) =∞
La politique converge vers une politique greedy :
limk←∞
πk(a|s) = 1argmaxa∈A
qk(s,a)
Par exemple : un apprentissage ε-greedy est GLIE si εk = 1k
Clément Rambour Model Free Prediction and Control 27 / 44

Introduction Model Free Prediction Model Free Control
ε-greedy policy iteration
Intuition : explorer continuement tout en convergent vers lapolitique optimale
Toutes les actions ont une probabilité non nulleL’action qui maximise q(s, a est prise avec la probabilité εLes autres actions peuvent être choisie avec une probabilité ε
πgreedy(a|s) =
εm + 1− ε si a∗ = argmax
a∈Aq(s, a)
εm sinon
avec m = |A|
Clément Rambour Model Free Prediction and Control 28 / 44

Introduction Model Free Prediction Model Free Control
GLIE Monte Carlo
Échantillonner k épisodes basés sur π : {S1, A1, R2, · · · , ST }Pour chaque couple (st, at) :
N(st, at)← N(st, at) + 1
Q(st, at)← Q(st, at) +1
N(st, at)(Gt −Q(st, at))
Amélioration ε-greedy de π :
ε← 1
k
π ← ε− greedy(Q)
GLIE MC converge vers la fonction action-valeur optimale
Clément Rambour Model Free Prediction and Control 29 / 44

Introduction Model Free Prediction Model Free Control
GLIE Monte Carlo
Échantillonner k épisodes basés sur π : {S1, A1, R2, · · · , ST }Pour chaque couple (st, at) :
N(st, at)← N(st, at) + 1
Q(st, at)← Q(st, at) +1
N(st, at)(Gt −Q(st, at))
Amélioration ε-greedy de π :
ε← 1
k
π ← ε− greedy(Q)
GLIE MC converge vers la fonction action-valeur optimale
Clément Rambour Model Free Prediction and Control 29 / 44

Introduction Model Free Prediction Model Free Control
Table of Contents
1 Introduction
2 Model Free PredictionMonte Carlo samplingTD0 LearningTD(λ) Learning
3 Model Free ControlIntroductionOn policy et SARSAOff policy et Q-learning
Clément Rambour Model Free Prediction and Control 30 / 44

Introduction Model Free Prediction Model Free Control
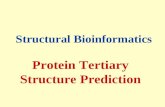
SARSA
Clément Rambour Model Free Prediction and Control 31 / 44

Introduction Model Free Prediction Model Free Control
SARSA
SARSA converge vers la politique optimale (Q(s, a)→ q∗(s, a)) si,La séquence des politiques est GLIELe learning rate αt vérifie les conditions suivantes :
∞∑t=1
αt =∞
∞∑t=1
α2t <∞
Clément Rambour Model Free Prediction and Control 32 / 44

Introduction Model Free Prediction Model Free Control
SARSA
SARSA converge vers la politique optimale (Q(s, a)→ q∗(s, a)) si,La séquence des politiques est GLIELe learning rate αt vérifie les conditions suivantes :
∞∑t=1
αt =∞
∞∑t=1
α2t <∞
Clément Rambour Model Free Prediction and Control 32 / 44

Introduction Model Free Prediction Model Free Control
Extensions
SARSA similaire à l’estimation avec TD(0) :On estime la fonction de valeur d’état-action q(s, a) par mise àjour de la TD Target :
Q(st, at)← Q(st, at) + α(Rt+1 + γQ(st+1, at+1)−Q(st, at))
contrôle : on cherche à suivre une politique optimale →πt = ε-greedy(Q(st, at))
L’estimation peut être étendue aux extension de TD déjàrencontrée
Clément Rambour Model Free Prediction and Control 33 / 44

Introduction Model Free Prediction Model Free Control
Extensions
SARSA similaire à l’estimation avec TD(0) :On estime la fonction de valeur d’état-action q(s, a) par mise àjour de la TD Target :
Q(st, at)← Q(st, at) + α(Rt+1 + γQ(st+1, at+1)−Q(st, at))
contrôle : on cherche à suivre une politique optimale →πt = ε-greedy(Q(st, at))
L’estimation peut être étendue aux extension de TD déjàrencontrée
Clément Rambour Model Free Prediction and Control 33 / 44

Introduction Model Free Prediction Model Free Control
Table of Contents
1 Introduction
2 Model Free PredictionMonte Carlo samplingTD0 LearningTD(λ) Learning
3 Model Free ControlIntroductionOn policy et SARSAOff policy et Q-learning
Clément Rambour Model Free Prediction and Control 34 / 44

Introduction Model Free Prediction Model Free Control
Off-Policy learning
Intuition : Apprendre d’une autre politiqueÉvaluer une politique cible π(s|a) : vπ(s), qπ(s, a)Suivre une politique différente (comportement) : µ(a|s)
{S1, A1, R2, ..., ST } ∼ µ
Nombreux cas d’utilisation :Apprendre d’humainsRé-utiliser l’expérience passéeApprendre une politique optimale tout en suivant unepolitique exploratoire
Clément Rambour Model Free Prediction and Control 35 / 44

Introduction Model Free Prediction Model Free Control
Importance sampling
Espérance de f(X) avec X ∼ P :
EP [f(X)] =∑
P (X)f(X)
Espérance de f(X) par rapport à une autre distribution Q :
EP [f(X)] =∑
P (X)f(X)
=∑
Q(X)P (X)
Q(x)f(X)
= EX∼Q[P (X)
Q(X)f(X)] (1)
Clément Rambour Model Free Prediction and Control 36 / 44

Introduction Model Free Prediction Model Free Control
Off-Policy Monte-Carlo
Utiliser les retour générer par µ (le comportement) pour évaluerπ
Pondération du retour par le facteur de correction sur toutl’épisode :
Gπ/µt =
π(At|St)π(At+1|St+1)...π(AT |St)µ(At|St)µ(At+1|St+1)...µ(AT |St)
La valeur est mise à jour grâce au retour corrigé :
V (St)← V (St) + α(Gπ/µt − V (St))
Pour que la correction soit définie : µ 6= 0 si π 6= 0
Peut entraîner des problème de stabilité
Clément Rambour Model Free Prediction and Control 37 / 44

Introduction Model Free Prediction Model Free Control
Off-Policy TD
Utiliser les retour générer par µ (le comportement) pour évaluerπ
Pondération de la TD target facteur de correction sur pour uneétape lors de la mise à jour :
V (St)← V (St) + α
(π(At|St)µ(At|St)
(Rt+1 + γV (St+1))− V (St)
)Meilleure variance et conditionnement que off-policy MCsampling
Clément Rambour Model Free Prediction and Control 38 / 44

Introduction Model Free Prediction Model Free Control
Q-learning
Off policy TD learnging pour l’estimation de la fonction devaleur (état,action)Importance sampling plus nécessaireAt+1 ∼ µ(.|St+1)
On considère une action alternative A′ ∼ π(.|St+1)
La TD target est distribuée selon µ mais on a choisi une actionA′ donnée par π :
Q(St, At ← Q(st, At) + α((Rt+1 + γQ(St+1, A
′))−Q(St, At))
Clément Rambour Model Free Prediction and Control 39 / 44

Introduction Model Free Prediction Model Free Control
Q-learning
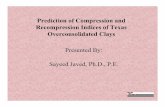
Choix de µ et π ?µ gère l’explorationπ cherche l’optimalitéSimple schéma off-policy à partir d’une même politique :
π(S|A) = greedy(Q) = argmaxa′
Q(S,A)
µ(S|A) = ε− greedy(Q)
Clément Rambour Model Free Prediction and Control 40 / 44

Introduction Model Free Prediction Model Free Control
Q-learning
Clément Rambour Model Free Prediction and Control 41 / 44

Introduction Model Free Prediction Model Free Control
Q-learngin
Clément Rambour Model Free Prediction and Control 42 / 44

Introduction Model Free Prediction Model Free Control
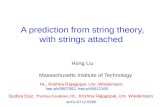
SARSA vs. QLearning
Clément Rambour Model Free Prediction and Control 43 / 44

Introduction Model Free Prediction Model Free Control
Bibliogrphie
Reinforcement Learning : an introduction, second edition,Richard S. Sutton and Adrew G. BartoReinforcement Learning courses, David Silver, DeepMind(https ://www.davidsilver.uk/)
Clément Rambour Model Free Prediction and Control 44 / 44