MÉTODO DOS DESLOCAMENTOS: BARRAS BI-ARTICULADAS...
28
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 74 MÉTODO DOS DESLOCAMENTOS: BARRAS BI-ARTICULADAS 3D Consideremos a estrutura constituida por duas 3 barras bi-articuladas e submetida a uma acção força P aplicada no nó e a um assentamento de apoio δ V . P Perspectiva z y x δ V P E, A α L 2 L 1 . cos α δ V β y z L 3 x z P x y δ V Alçado yz Alçado xz = P Perspectiva z y x ∆ 3 ∆ 1 ∆ 2 δ V P E, A α L 2 L 1 . cos α δ V y z L 3 x z P x y δ V Alçado yz Alçado xz ∆ 3 ∆ 2 ∆ 1 ∆ 3 ∆ 2 X ∆ 1 que, por sobreposição dos efeitos, é igual à soma de duas estruturas: P Perspectiva z y x R 30 R 10 R 20 δ V Perspectiva ∆ 3 ∆ 1 + ∆ 2 z y x
Transcript of MÉTODO DOS DESLOCAMENTOS: BARRAS BI-ARTICULADAS...

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 74
MÉTODO DOS DESLOCAMENTOS: BARRAS BI-ARTICULADAS 3D
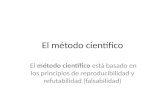
Consideremos a estrutura constituida por duas 3 barras bi-articuladas e submetida a uma
acção força P aplicada no nó e a um assentamento de apoio δV.
P
Perspectiva
z
y
x
δV
P
E, A
α
L2L1 . cos α
δV
β
y
z
L3
x
z
P
x y
δV
Alçado yz Alçado xz
=
P
Perspectiva
z
y
x
∆3
∆1 ∆2
δV
P
E, A
α
L2L1 . cos α
δV y
z
L3
x
z
P
x y
δV
Alçado yz Alçado xz
∆3 ∆2
∆1
∆3
∆2 X
∆1
que, por sobreposição dos efeitos, é igual à soma de duas estruturas:
P
Perspectiva
z
y
x
R30
R10 R20
δV
Perspectiva ∆3
∆1 + ∆2
z
y
x

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 75
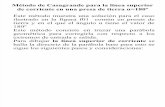
Analisando apenas a sub-estrutura relativa às acções, temos:
0) Assentamento de apoio:
Perspectiva
R30
R10 R20
δV z
y
x
E, A
α
L2L1 . cos α
δV y
z
L3
x
z
x y
δV
Alçado yz Alçado xz R30
R20
R10
R30
R10
R20 X
E, A
R’30 R’20
α
R’’30 R’’20
π’10
=
δV αδπ sin
110 ⋅⋅
⋅−=′ VL
AEy
z
x
R’’’30
R’’’10
y
z
x
x
z
y
XR’10 R’10 R’20
απαπ
sincos
0
1030
1020
10
⋅′=′⋅′=′
=′
RRR
1) Assentamento ∆1:
Perspectiva
K31 K11
∆1
z
y
x
K21
E, A
α
L2L1 . cos α
y
z
L3
x
z
x y
Alçado yz Alçado xz
K31
K21
∆1
K11
K21
K31K11
∆1 XX

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 76
K’31 K’21
α
= K’’31 K’’21
E, A
y
z
x
K’’’33 K’’’23
y
z
x
x
z
y
XK’’’13K’’11K’11
∆1 ∆1
X∆1
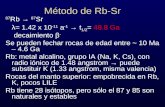
2) Assentamento ∆2:
Perspectiva
K32 K12
∆2
z
y
x
K22
E, A
α
L2L1 . cos α
y
z
L3
x
z
x y
Alçado yz Alçado xz
X
K32
K22
K12 K22
K32
K12∆2 ∆2
K’32
K’22
α
= K’’32 K’’22
π’12
E, A
απ cos1
12 ⋅⋅
=′LAE
y
z
x
K’’’32
K’’’12
y
z
x
XK’’’22 K’’12K’12
x
z
y
απαπ
sincos
0
1232
1222
12
⋅′=′⋅′=′
=′
KKK

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 77
3) Assentamento ∆3:
Perspectiva
K33 K13
∆3
z
y
x
K23
E, A
α
L2L1 . cos α
y
z
L3
x
z
x y
Alçado yz Alçado xz
K33
K23
∆3
K13
XK23
K33
K13∆3 X
K’33 K’23
α
= K’’33 K’’23
π’13
E, A
απ sin1
13 ⋅⋅
=′LAE
y
z
x
K’’’33
K’’’13
y
z
x
x
z
y
XK’’’23
XK’’13
K’13
Estabelecendo as equações de equilíbrio de forças para cada uma das direcções
correspondentes às incógnitas hipergeométricas ∆i, i = 1, 2, 3, temos:
∆∆∆
⋅
+
=
⋅−⋅−=
3
2
1
333231
232221
131211
30
20
10
3
2
1
sincos0
KKKKKKKKK
RRR
PP
FFF
ββ

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 78
MÉTODO DOS DESLOCAMENTOS: MATRIZ DE RIGIDEZ / ESFORÇOS NOS NÓS
Seja um elemento de barra bi-articulado em equilíbrio submetido a um conjunto de forças concentradas aplicadas nos nós extremos e/ou variações uniformes de temperatura. Aplicando o Princípio de Sobreposição de Efeitos e fazendo uso de valores dos deslocamentos nas extremidades determinados anteriormente, estabelece-se um sistema de equações que traduzem o equilíbrio de forças que terá que existir nas três direcções em cada nó extremo da barra.
Forças / Variação de temperatura aplicadas:
L
R3 R6
R1 R4
E, A
∆t
z y
x R2 R5
Deslocamentos calculados:
L
E, A ∆3 ∆5∆2
∆4
z y
x
∆1
∆6
=
Acção Variação de temperatura aplicada:
L
R30=0 R60=0
R10 R40
E, A
∆t
z y
x R20=0 R50=0
+

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 79
Acção deslocamentos dos nós:
+
∆1=1
K61=0 K31=0
K21=0 K51=0
K11 K41
∆4=1
K64=0 K34=0
K24=0 K54=0
K14 K44
+ ∆2=1 K62=0 K32=0
K22=0 K52=0
K42=0K12=0
K52=0
∆5=K62=0 K35=0
K25=0
K15=0
K42=0
+
K43=0
∆3=1
K63=0 K33=0
K23=0 K53=0
K13=0
K56=0 ∆6=1
K66=0 K36=0
K26=0
K46=0K16=0
Estabelecendo a equação de equilíbrio de forças nos nós apenas nas direcções 2 e 4 do eixo da barra, as únicas que introduzem esforços na barra, temos:
∆∆
⋅
+
=
4
1
4441
1411
40
10
4
1
KKKK
RR
FF
i.e. { } { } [ ] { }∆⋅+= KRF 0 , designado-se a matriz [ ]K por matriz de rigidez, agora relativa ao
elemento de barra bi-articulado. Por outro lado, o vector { }F não representa mais do que os
esforços nas extremidades da barra segundo as direcções e os sentidos indicados na figura.
Substituindo as forças Kij pelos valores determinados anteriormente e as forças Ri pelos esforços correspondentes, neste caso apenas os esforços axiais, temos:
∆∆
⋅
+−−+
⋅+
=
−
4
1
40
10
1111
LEA
RR
NN
d
e

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 80
MÉTODO DOS DESLOCAMENTOS: FORMULAÇÃO MATRICIAL
Consideremos uma barra inclinada de um ângulo α em relação à horizontal e dois sistemas
de coordenadas associados: δ correspondente aos g.l. ditos locais da barra (... direcção do
eixo da barra) e ∆ aos g.l. globais (... direcção vertical e direcção horizontal). Exite uma
Matriz de Transformação [ ]T que transforma as coordenadas ∆ nas coordenadas δ:
δ1 ∆1
∆3
∆4
∆6
δ2
α
z y
x
∆5
∆2
∆∆∆∆∆∆
⋅
=
654321
000000
21
zyX
zyX
uuuuuu
δδ
, i.e. { } [ ] { }∆⋅= Tδ
representado ( )zyx uuu as coordenadas do vector versor do eixo da barra no sistema de
eixos global xyz.
O mesmo raciocínio se pode estabelecer para as forças nos nós. Sejam φ as forças
correspondentes aos g.l. ditos locais da barra (... esforço axial) e F aos g.l. globais (... força vertical e força horizontal). A mesma Matriz de Transformação [ ]T transforma as
coordenadas F nas coordenadas φ:
φ1 F1
F3
F4
F6
φ2
α
F5
F2
z y
x

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 81
⋅
=
654321
000000
21
FFFFFF
uuuuuu
zyX
zyX
φφ
, i.e. { } [ ] { }FT ⋅=φ
Esta matriz é ortogonal, i.e. { } [ ] { }φ⋅= TTF .
A formulação matricial do sistema de equações que estabelece o equilíbrio de forças nos nós de uma estrutura bi-articulada tridimensional, segue os passos já apresentados para o caso bi-dimensional. Note-se, no entanto, que neste caso a aplicação da transformação à matriz de rigidez no sistema de eixos local, 2x2, na matriz de rigidez no sistema de eixos global, a transfoirma numa matriz de 3x3 elementos.

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 82
p
=
p
∆1 ∆2
∆3 ∆4
∆5
=
p
∆1 ∆2
∆3
p
E, I, J
∆1
∆3
∆2
α
X
0) Cargas aplicadas:
p
R10 R20
R30
p
=
∆3
∆2
∆1
p
∆4
=
∆3
∆2
∆1
p
∆1
∆2 ∆3
E, I, A
α
∆to
p
0) Cargas aplicadas:
∆3
∆2
∆1
p
PARALELISMO ENTRE ESTRUTURAS CONTÍNUAS PLANAS DO TIPO PÓRTICO E DO TIPO GRELHA

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 83
p
E, I, J
=
R10
R30
R20
α
X
1) Assentamento ∆1:
∆1 K21
K31
K11
2) Assentamento ∆2:
∆2
K21
K31
K11
3) Assentamento ∆3:
∆3 K23
K31
K13
E, I, A
R10
R20 R30
α
p
=
1) Assentamento ∆1:
E, I, A
K11
K21 K31
α
∆1
2) Assentamento ∆2:
E, I, A
K12
K22 K32
α
∆2
3) Assentamento ∆3:
E, I, A
K13 K23
K33
α
∆3
Sistema de equações:
∆∆∆
⋅
+
=
3
2
1
333231
232221
131211
30
20
10
3
2
1
KKKKKKKKK
RRR
FFF

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 84
MÉTODO DOS DESLOCAMENTOS: ESTRUTURAS EM GRELHA
Seja uma nova estrutura hiperstática, plana, constituida por duas barras, uma inclinada de
um ângulo θ em relação à horizontal, solicitada por forças na direcção ortogonal ao plano
da estrutura.
p
p
∆1 ∆2
∆3 ∆4
∆5
p
E, I, J
=
∆1
∆3
∆2
α
L2 L1 . cos α
X∆4
∆5
cuja resolução, por analogia às estruturas contínuas de pórticos planos, se simplifica
p
∆1 ∆2
∆3
p
E, I, J
=
∆1
∆3
∆2
α
L2 L1 . cos α
X
Por sobreposição dos efeitos, temos:

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 85
p
R10 R20
R30
∆1 ∆2
∆3
+
=
p
E, I, J
=
R10
R30
R20
α
L2 L1 . cos α
X
E, I, J
+
∆1
∆3
∆2
α
L2L1 . cos α
X
Analisando cada uma das sub-estruturas anteriores em separado, temos:
0) Cargas aplicadas:
p
R10 R20
R30
α
=
φ’10
φ’20
E, I, J
R’10
R’30=φ’30
Xp
X
R’20
R’’10
R’’30
R’’20
010 =′φ 020 =′φ
αφαφαφαφ
cossinsincos
201020
201010
⋅′+⋅′+=′⋅′−⋅′+=′
RR
1) Assentamento ∆1:
∆1 K21
K31
K11
α
=
φ’11
φ’21
E, I, J
K’11
K’31=φ’31
X X
K’21
K’’11
K’’31
K’’21
αφ cos1
11 ⋅⋅
=′LJG
αφ sin4
121 ⋅
⋅⋅−=′
LIE
αφαφαφαφ
cossinsincos
211121
211111
⋅′+⋅′−=′⋅′+⋅′+=′
KK

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 86
2) Assentamento ∆2:
∆2
K21
K31
K11
α
=
φ’12
φ’22
E, I, J
K’12
X X
K’22
K’’12
K’’32
K’’22
αφ sin1
12 ⋅⋅
=′LJG
αφ cos4
122 ⋅
⋅⋅=′
LIE
K’32=φ’32
αφαφαφαφ
cossinsincos
221222
221212
⋅′+⋅′−=′⋅′+⋅′+=′
KK
3) Assentamento ∆3:
∆3 K23
K31
K13
α
=
φ’13=0
φ’23
E, I, J
K’13
X X
K’23
K’’13
K’’33
K’’23
013 =′φ
21
236LIE ⋅⋅
−=′φ
K’33=φ’33
αφαφαφαφ
cossinsincos
231323
231313
⋅′+⋅′−=′⋅′+⋅′+=′
KK
Estabelecendo as equações de equilíbrio de forças para cada uma das direcções
correspondentes às incógnitas hipergeométricas ∆i, i = 1, 2, 3, temos:
∆∆∆
⋅
+
=
3
2
1
333231
232221
131211
30
20
10
3
2
1
KKKKKKKKK
RRR
FFF
sendo ijijij KKK ′′+′= , com i , j = 1, 2, 3.

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 87
MÉTODO DOS DESLOCAMENTOS: MATRIZ DE RIGIDEZ / ESFORÇOS NOS NÓS
Seja um elemento de barra em equilíbrio submetido a um conjunto de forças concentradas aplicadas nos nós extremos e concentradas e/ou distribuidas aplicadas ao longo do eixo da barra. Aplicando o Princípio de Sobreposição de Efeitos e fazendo uso de valores dos deslocamentos nas extremidades determinados anteriormente, estabelece-se um sistema de equações que traduzem o equilíbrio de forças que terá que existir nas três direcções de cada nó extremo da barra.
Forças aplicadas:
L
F3
F2
F6F1 F4E, I, J
p1 p2
F5
Deslocamentos calculados:
L
E, I, J ∆3
∆2
∆6
∆5
∆1 ∆4
p1 p2
=
Acção carga aplicada:
L
b
c a
p1 p2
R30
R20
R60
R50
R10 R40
E, I, J
+

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 88
Acção deslocamentos dos nós:
K11
K21 K31
K41
K61 K51
∆1=1
K14
K24 K34
K44
K64 K54
∆4=1
+
K12
K22
K42
K52
∆2=1
K32 K62 K15 K45 ∆5=1
K35 K65
K25 K55
+
K13
K23
K33 K43
K63
K53∆3=1
K16
K26
K36 K46
K66
K56∆6=1
Estabelecendo a equação de equilíbrio de forças nos nós, temos:
∆∆∆∆∆∆
⋅
+
=
6
5
4
3
2
1
666564636261
565554535251
464544434241
363534333231
262524232221
161514131211
60
50
40
30
20
10
6
5
4
3
2
1
KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK
RRRRRR
FFFFFF
i.e. { } { } [ ] { }∆⋅+= KRF 0 , designado-se a matriz [ ]K por matriz de rigidez. Por outro lado, o
vector { }F não representa mais do que os esforços nas extremidades da barra segundo as
direcções e os sentidos indicados na figura. Substituindo as forças Kij pelos valores determinados anteriormente e as forças Ri pelos esforços correspondentes, temos:
∆∆∆∆∆∆
⋅
−−−
−
−
−
−
−
+
=
−−−
6
5
4
3
2
1
60
50
40
30
20
10
312
2603
122
602
6402620
00003
122
60312
260
26202
640
0000
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LGJ
LGJ
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LGJ
LGJ
RRRRRR
TMMTMM
d
fd
td
e
fe
te

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 89
MÉTODO DOS DESLOCAMENTOS
Reacções resultantes de assentamentos de apoio em barras bi-encastradas. Resumo.
1 3
2
4
5
6
E, I, J
L
∆1 = 1
K11 K31
K21
K41
K51
K61
E, I, J
L
∆ 2 = 1
K12 K32
K22
K42
K52
K62
E, I, J
L
K12
K22 K32
K42
K62 K52
∆ 3 = 1
K13 K33
K23
K43
K53
K63
E, I, J
L
K13
K23 K33
K43
K63 K53
061
051
41
031
021
11
=
=
−=
=
=
=
K
KL
GJK
K
KL
GJK
26
62
252
42
26
32
422
012
LEIKL
EIK
K
LEIKL
EIK
K
−=
=
=
=
=
=
312
63
26
53
043
312
33
26
23
013
LEIKL
EIK
K
LEIKL
EIK
K
−=
=
=
=
=
=

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 90
∆ 4 = 1
K14 K34
K24
K44
K54
K64
E, I, J
L
∆ 5 = 1
K15 K35
K25
K45
K55
K65
E, I, J
L
K15
K25 K35
K45
K65 K55
∆ 6 = 1
K16 K36
K26
K46
K56
K66
E, I, J
L
K16
K26 K36
K46
K66
L
K56
MÉTODO DOS DESLOCAMENTOS: FORMULAÇÃO MATRICIAL
Consideremos uma barra inclinada de um ângulo α em relação à horizontal e dois sistemas
de coordenadas associados: δ correspondente aos g.l. ditos locais da barra (... direcção de
translação ortogonal ao plano da barra, rotação na direcção ortogonal ao eixo da barra e na
direcção do eixo da barra) e ∆ aos g.l. globais (...direcção de translação ortogonal ao plano
064
054
44
034
024
14
=
=
=
=
=
−=
K
KL
GJK
K
KL
GJK
26
65
455
045
26
35
225
015
LEIKL
EIK
K
LEIKL
EIK
K
−=
=
=
=
=
=
312
66
26
56
046
312
36
26
26
016
LEIKL
EIK
K
LEIKL
EIK
K
=
−=
=
−=
−=
=

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 91
da barra, rotação na direcção horizontal e na direcção vertical). Exite uma Matriz de
Transformação [ ]T que transforma as coordenadas ∆ nas coordenadas δ:
∆3∆1
∆2
∆6
∆5 ∆4
α
δ1 δ3
δ2
δ6
δ5 δ4
∆∆∆∆∆∆
⋅
−
−
=
654321
1000000)cos()(0000)()cos(0000001)000000)cos()(0000)()cos(
654321
αααα
αααα
δδδδδδ
sensen
sensen
, i.e. { } [ ] { }∆⋅= Tδ
sendo α medido sempre da horizontal positiva na extremidade esquerda para a barra para a
barra no sentido contrário ao dos ponteiros do relógio:
α
δ2
δ3
δ1
δ6
δ5
δ4
∆3
∆1
∆2
∆6 ∆4
∆5
O mesmo raciocínio se pode estabelecer para as forças nos nós. Sejam φ as forças
correspondentes aos g.l. ditos locais da barra (... momento torsor, momento flector e esforço transverso) e F aos g.l. globais (... momento horizontal, momento vertical e esforço transverso). A mesma Matriz de Transformação [ ]T transforma as coordenadas F nas
coordenadas φ:

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 92
F3F1
F2
F6
F5 F4
φ6
φ5
α
φ1 φ3
φ2
φ4
⋅
−
−
=
654321
1000000)cos()(0000)()cos(0000001)000000)cos()(0000)()cos(
654321
FFFFFF
sensen
sensen
αααα
αααα
φφφφφφ
, i.e. { } [ ] { }FT ⋅=φ
Esta matriz é ortogonal, i.e. [ ] [ ]TTT =−1 . Seja um elemento de barra inclinado em equilíbrio
submetido a um conjunto de forças concentradas aplicadas nos nós extremos e concentradas e/ou distribuidas aplicadas ao longo do eixo da barra. De acordo com as relações estabelecidas anteriormente, temos:
Forças aplicadas:
L
E, I, J
p1
p2
α
φ1 φ3
φ2
φ6
φ5 φ4
L α
F6
F5
F4
F3F1
F2
E, I, J
p1
p2

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 93
Deslocamentos calculados:
L
E, I, J
p1
p2
α
δ1 δ3
δ2
δ6
δ5 δ4
L α
∆3∆1
∆2
∆6
∆5
∆4
E, I, J
p1
p2
⋅
−−−
−
−
−
−
−
+
=
6
5
4
3
2
1
60
50
40
30
20
10
6
5
4
3
2
1
312
2603
122
602
6402620
00003
122
60312
260
26202
640
0000
δδδδδδ
φφφφφφ
φφφφφφ
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LGJ
LGJ
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LGJ
LGJ
, i.e. { } { } [ ] { }δφφ ⋅+= K0
Utilizando as relações anteriores, podemos passar do sistema de coordenadas local δ e φ
para o sistema de coordenadas global ∆ e F,
{ } [ ] { }
{ } { } [ ] { }{ } { } [ ] [ ] { }
{ } [ ] { } { } [ ] { }{ } [ ] { } [ ] [ ] { }( )∆⋅⋅+⋅=⇒
⋅=⇒⋅=∧
∆⋅⋅+=⇒
⋅+=∧
∆⋅=
TKTFTFFT
TKK
T
T
T0
0
0φ
φφ
φφδφφ
δ
i.e. { } [ ] { } [ ] [ ] [ ] { } { } { } [ ] { }∆⋅+=⇔∆⋅⋅⋅+⋅= gTT KRFTKTTF 00φ . Partindo do equilíbrio de forças da
barra no referencial local, e utilizando as matrizes de transformação de coordenadas, estabelecemos a equação de equilibrio de forças da barra no referencial global. A assemblagem da matriz de rigidez e do vector das cargas, segue os passos já indicados para as barras contínuas e bi-articuladas.

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 94
MÉTODO DOS DESLOCAMENTOS: ESTRUTURAS MISTAS
Seja a seguinte estrutura hiperstática a resolver pelo método dos deslocamentos:
P
p L1
L2
E, I, A
L3
∆1
P
pL1
L2∆2
∆3 =
E, I, A
L3
que, por sobreposição dos efeitos, é igual à soma de duas estruturas:
R10
P
p L1
L2 R20
R30 +
E, I, A
L3
∆1
L1
L2∆2
∆3
E, I, A
L3
Analisando cada uma das sub-estruturas anteriores em separado, temos:

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 95
0) Cargas aplicadas:
R10
P
p
R20 R30
=
E, I, A
R’’’10
p
R’’’20 R’’’30
P
R’20
R’30
R’’10
R’’20 R’’30
1) Assentamento ∆1:
E, I, A
K11
K21 K31
∆1 =
K’’’11
K’’’21 K’’’31
K’21
K’31
K’’11
K’’21 K’’31
∆1=1
2) Assentamento ∆2:
E, I, A
K12
K22 K32
∆2 =
K’’’12
K’’’22 K’’’32
K’22
K’32
K’’12
K’’22 K’’32
∆2=1

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 96
3) Assentamento ∆3:
E, I, A
K13
K23 K33
∆3 =
K’’’13
K’’’23
K’’’33 K’23
K’33
K’’13
K’’23
K’’33
∆3=1
Estabelecendo as equações de equilíbrio de forças para cada uma das direcções
correspondentes às incógnitas hipergeométricas ∆i, i = 1, 2, 3, temos:
∆∆∆
⋅
+
=
3
2
1
333231
232221
131211
30
20
10
3
2
1
KKKKKKKKK
RRR
FFF
sendo ijijijij KKKK ′′′+′′+′= , com i , j = 1, 2, 3.

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 97
MÉTODO DOS DESLOCAMENTOS: ESTRUTURAS TRIDIMENSIONAIS
Seja uma nova estrutura hiperstática, tridimensional, constituida por três barras, ortogonais entre si, solicitadas por forças aplicadas nas barras.
pF
p
∆5 ∆6
∆4 ∆8
∆9
∆2 ∆3
∆1 ∆7
F
p∆5 ∆6
∆4
∆2 ∆3
∆1
ou
F
Por sobreposição dos efeitos, temos:
p
R50 R60
R40
R20 R30
R10
F
∆5 ∆6
∆4
∆2 ∆3
∆1
+

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 98
Analisando cada uma das sub-estruturas anteriores em separado, temos:
0) Cargas aplicadas:
pR50 R60
R40
R20 R30
R10
F
1) Assentamento ∆1: 4) Assentamento ∆4:
K51 K61
K21 K31 ∆1=1
K41
K11
K54 K64
K34
K44
K14
∆4=1
K24
2) Assentamento ∆2: 5) Assentamento ∆5:
K52 K62
K22 K32 ∆2=1
K42
K12
K55 K65
K35
∆5=1
K45
K15
K25

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 99
3) Assentamento ∆3: 6) Assentamento ∆6:
K53 K63
K43
K23 K33
K13
∆3=1
K56 K66
K26 K36∆6=1
K46
K16
∆6=1
Estabelecendo as equações de equilíbrio de forças para cada uma das direcções
correspondentes às incógnitas hipergeométricas ∆i, i = 1, 2, 3, 4, 5, 6, temos:
∆∆∆∆∆∆
⋅
+
=
6
5
4
3
2
1
666564636261
565554535251
464544434241
363534333231
262524232221
161514131211
60
50
40
30
20
10
6
5
4
3
2
1
KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK
RRRRRR
FFFFFF
MÉTODO DOS DESLOCAMENTOS: MATRIZ DE RIGIDEZ / ESFORÇOS NOS NÓS
Seja um elemento de barra em equilíbrio submetido a um conjunto de forças concentradas aplicadas nos nós extremos e concentradas e/ou distribuidas aplicadas ao longo do eixo da barra. Aplicando o Princípio de Sobreposição de Efeitos e fazendo uso de valores dos deslocamentos nas extremidades determinados anteriormente, estabelece-se um sistema de equações que traduzem o equilíbrio de forças que terá que existir nas três direcções de cada nó extremo da barra.
Forças aplicadas:
F2F1
F3
F10
F9
F7E, I, A, J
L
F5
F4
F6
F11 F8
F12
z
x
y x
y
p1 p2

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 100
Deslocamentos calculados:
∆2∆1
∆3
∆10
∆9
∆7E, I, A, J
L
∆5
∆4
∆6
∆11 ∆8
∆12
z
x
y x
y
p1 p2
=
Acção carga aplicada:
R20R10
R30
R10,0
R90
R70 E, I, A, J
L
R50
R40
R60
R11,0 R80
R12,0
z
x
y x
y
p1 p2
+
Acção deslocamentos dos nós:
E, I, A, J
L
z
x
y x
y
∆2∆1
∆3
∆10
∆9
∆7
∆5
∆4
∆6
∆11 ∆8
∆12

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 101
Estabelecendo a equação de equilíbrio de forças nos nós, temos:
∆∆∆∆∆∆∆∆∆∆∆∆
⋅
−
−
−
−
−
−−−
−
−
−
−−−
−
−
+
=
−−−
−
−
−
12
11
10
9
8
7
6
5
4
3
2
1
22
22
2323
2323
22
22
2323
2323
0,12
0,11
0,10
90
80
70
60
50
40
30
20
10
400006200006
0000000000
004600002600
00612000061200
0000000000
60000126000012
200006400006
0000000000
002600004600
00612000061200
0000000000
60000126000012
LEI
LEI
LEI
LEI
LGJ
LGJ
LEI
L
EILEI
L
EIL
EI
L
EI
L
EI
L
EILEA
LEA
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LGJ
LGJ
LEI
L
EILEI
L
EIL
EI
L
EI
L
EI
L
EILEA
LEA
LEI
LEI
LEI
LEI
RRRRRRRRRRRR
MMMNTTMMMNTT
xxxx
yyyy
yyyy
xxxx
xxxx
yyyy
yyyy
xxxx
td
fxd
fyd
d
xd
yd
te
fxe
fye
e
xe
ye
MÉTODO DOS DESLOCAMENTOS: FORMULAÇÃO MATRICIAL
Encontrada a matriz de transformação [ ]T das coordenadas no sistema de eixos global ∆
nas coordenadas no sistema de eixos local δ, i.e. { } [ ] { }∆⋅= Tδ , a transformação e
assemblagem das matrizes de rigidez e dos vectores das acções segue os passos já apresentados para o caso das estruturas planas.