Mathematische Hilfsmittel - user · Jeder Vektor, der zu derjenigen Ebene parallel ist, die durch...
71
1 Mathematische Hilfsmittel
Transcript of Mathematische Hilfsmittel - user · Jeder Vektor, der zu derjenigen Ebene parallel ist, die durch...
1
Mathematische Hilfsmittel

2
Lateinische Schrift
a b c d e f g h i j k l m n o p q r s t u v w
x y z ß ä ö ü
A B C D E F G H I J K L M N O P Q R S T
U V W X Y Z Ä Ö Ü
Griechische Schrift
α β γ δ ε ς η ϑ ι κ λ µ
ν ξ ο π ρ σ τ υ ϕ χ ψ ω
Alpha Beta Gamma Delta Epsilon Zeta Eta Theta Jota Kappa Lambda My
Ny Ksi Omikron Pi Rho Sigma Tau Ypsilon Phi Chi Psi Omega
Α Β Γ ∆ Ε Ζ Η Θ Ι Κ Λ Μ
Ν Ξ Ο Π Ρ Σ Τ Υ Φ Χ Ψ Ω
Alpha Beta Gamma Delta Epsilon Zeta Eta Theta Jota Kappa Lambda My
Ny Ksi Omikron Pi Rho Sigma Tau Ypsilon Phi Chi Psi Omega

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 3
1 Lineare Algebra
1.1 Mengen
Definition 1-1
Eine Menge ist eine Zusammenfassung wohlunterschiedener Objekte unserer Anschauung oder unseres Denkens zu einem Ganzen. Die Objekte werden Elemente der Menge genannt.
Definition 1-2 Die leere Menge Æ ist eine Menge, die kein Element enthält.
Definition 1-3
Die Mengen A und B heißen gleich, wenn jedes Element von A auch Element von B ist und umgekehrt.
Definition 1-4
B ist eine Teilmenge von A, wenn jedes Element von B auch Element von A ist: B⊆A.
Definition 1-5 Die Vereinigungsmenge von A und B (A∪B) ist die Menge, die aus allen Elementen besteht, die zu A oder B, oder beiden gehören. Zahlenmengen
Menge der natürlichen Zahlen ÍN = 1,2,3...
Menge der ganzen Zahlen ÙZ = ...-2,-1,0,1,2..
Menge der rationalen Zahlen ÐQ = qp |p ∈ Z und q∈ Z
Die Menge der reellen Zahlen R besteht aus den rationalen Zahlen und den irrationalen Zah-
len.
4
1.2 Koordinaten
Definition 1-6
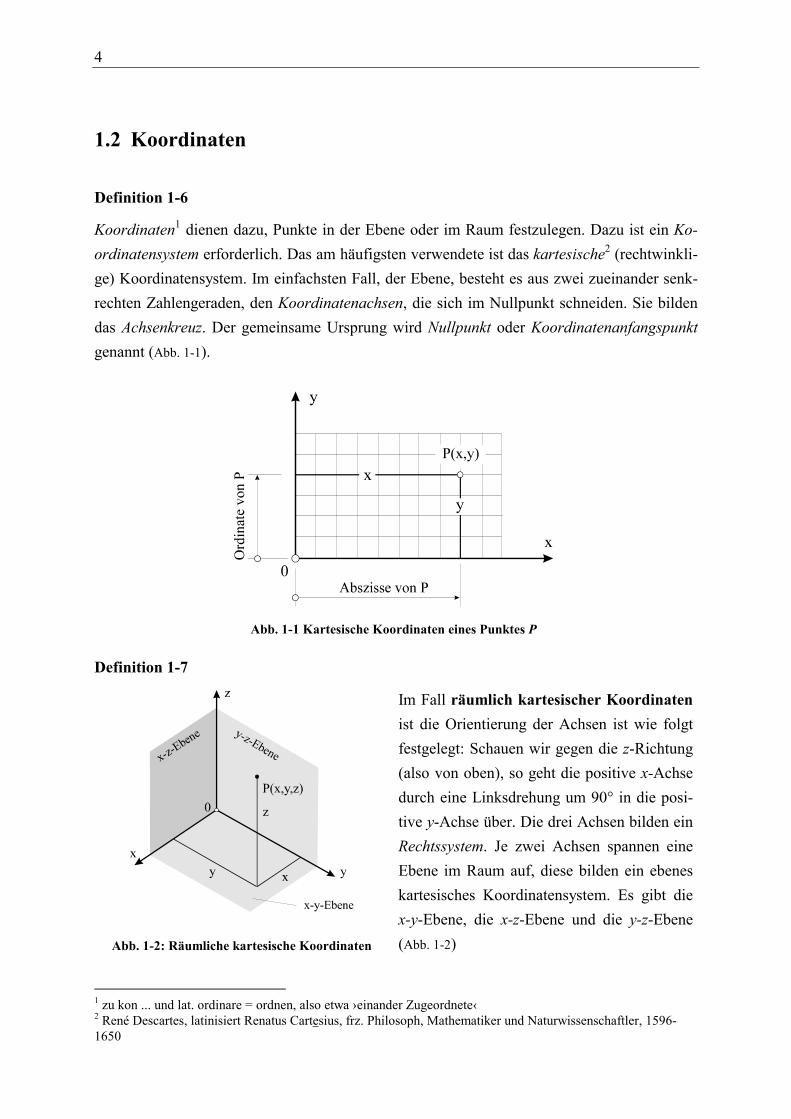
Koordinaten1 dienen dazu, Punkte in der Ebene oder im Raum festzulegen. Dazu ist ein Ko-ordinatensystem erforderlich. Das am häufigsten verwendete ist das kartesische2 (rechtwinkli-ge) Koordinatensystem. Im einfachsten Fall, der Ebene, besteht es aus zwei zueinander senk-rechten Zahlengeraden, den Koordinatenachsen, die sich im Nullpunkt schneiden. Sie bilden das Achsenkreuz. Der gemeinsame Ursprung wird Nullpunkt oder Koordinatenanfangspunkt genannt (Abb. 1-1).
Abb. 1-1 Kartesische Koordinaten eines Punktes P
Definition 1-7
Abb. 1-2: Räumliche kartesische Koordinaten
Im Fall räumlich kartesischer Koordinaten ist die Orientierung der Achsen ist wie folgt festgelegt: Schauen wir gegen die z-Richtung (also von oben), so geht die positive x-Achse durch eine Linksdrehung um 90° in die posi-tive y-Achse über. Die drei Achsen bilden ein Rechtssystem. Je zwei Achsen spannen eine Ebene im Raum auf, diese bilden ein ebenes kartesisches Koordinatensystem. Es gibt die x-y-Ebene, die x-z-Ebene und die y-z-Ebene (Abb. 1-2)
1 zu kon ... und lat. ordinare = ordnen, also etwa ›einander Zugeordnete‹ 2 René Descartes, latinisiert Renatus Cartesius, frz. Philosoph, Mathematiker und Naturwissenschaftler, 1596-1650
Prof. Dr. F.U. Mathiak, HS Neubrandenburg 5
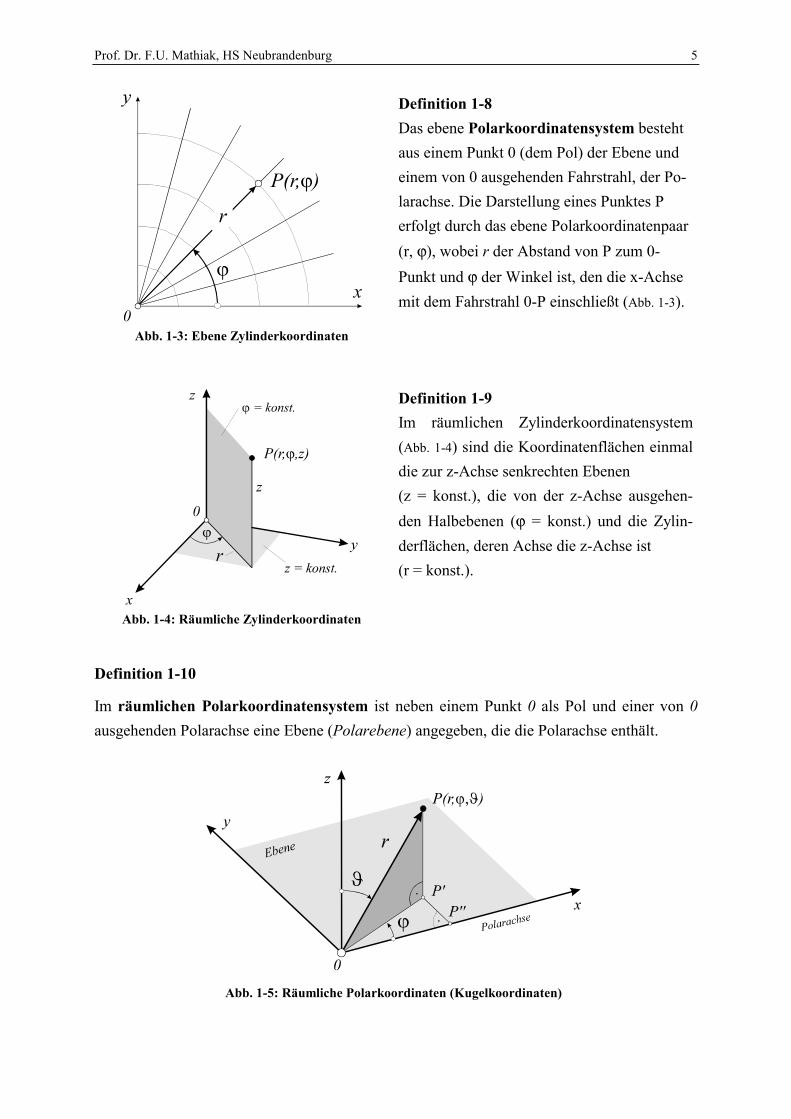
Abb. 1-3: Ebene Zylinderkoordinaten
Definition 1-8 Das ebene Polarkoordinatensystem besteht aus einem Punkt 0 (dem Pol) der Ebene und einem von 0 ausgehenden Fahrstrahl, der Po-larachse. Die Darstellung eines Punktes P erfolgt durch das ebene Polarkoordinatenpaar (r, ϕ), wobei r der Abstand von P zum 0-Punkt und ϕ der Winkel ist, den die x-Achse mit dem Fahrstrahl 0-P einschließt (Abb. 1-3).
Abb. 1-4: Räumliche Zylinderkoordinaten
Definition 1-9 Im räumlichen Zylinderkoordinatensystem (Abb. 1-4) sind die Koordinatenflächen einmal die zur z-Achse senkrechten Ebenen (z = konst.), die von der z-Achse ausgehen-den Halbebenen (ϕ = konst.) und die Zylin-derflächen, deren Achse die z-Achse ist (r = konst.).
Definition 1-10
Im räumlichen Polarkoordinatensystem ist neben einem Punkt 0 als Pol und einer von 0 ausgehenden Polarachse eine Ebene (Polarebene) angegeben, die die Polarachse enthält.
Abb. 1-5: Räumliche Polarkoordinaten (Kugelkoordinaten)
6
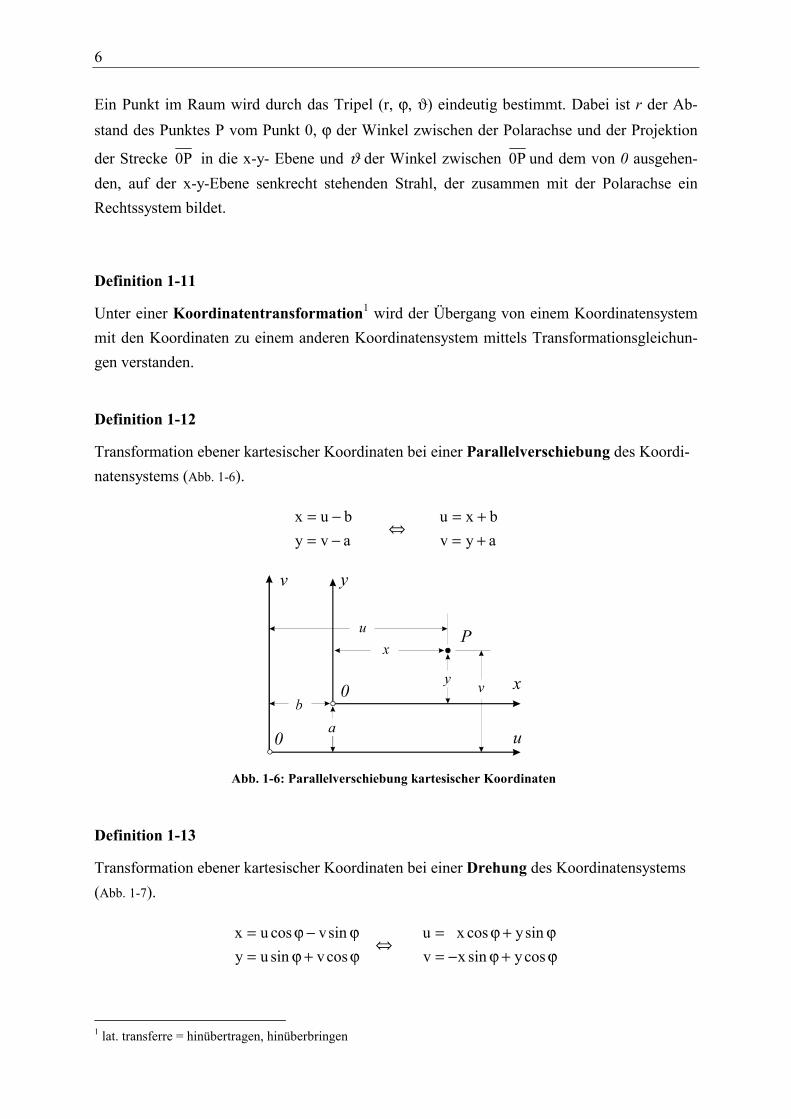
Ein Punkt im Raum wird durch das Tripel (r, ϕ, ϑ) eindeutig bestimmt. Dabei ist r der Ab-stand des Punktes P vom Punkt 0, ϕ der Winkel zwischen der Polarachse und der Projektion
der Strecke P0 in die x-y- Ebene und ϑ der Winkel zwischen P0 und dem von 0 ausgehen-den, auf der x-y-Ebene senkrecht stehenden Strahl, der zusammen mit der Polarachse ein Rechtssystem bildet.
Definition 1-11
Unter einer Koordinatentransformation1 wird der Übergang von einem Koordinatensystem mit den Koordinaten zu einem anderen Koordinatensystem mittels Transformationsgleichun-gen verstanden.
Definition 1-12
Transformation ebener kartesischer Koordinaten bei einer Parallelverschiebung des Koordi-natensystems (Abb. 1-6).
avybux
−=−=
⇔ ayvbxu
+=+=
Abb. 1-6: Parallelverschiebung kartesischer Koordinaten
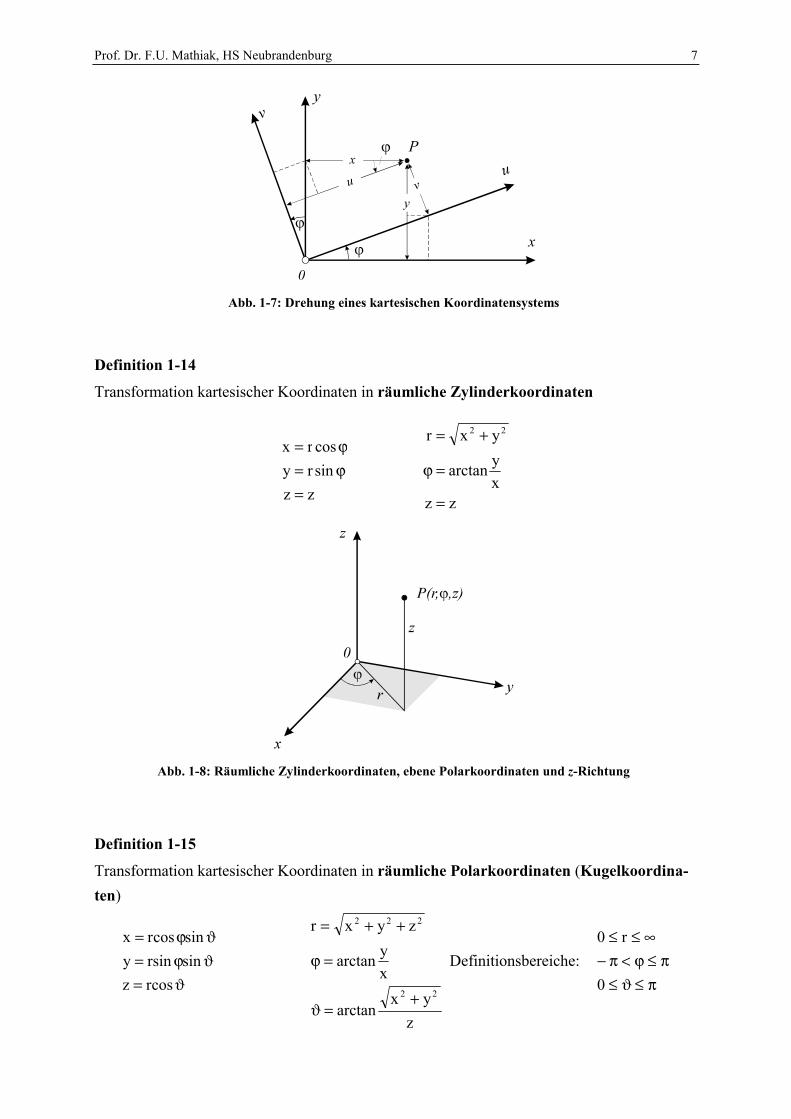
Definition 1-13
Transformation ebener kartesischer Koordinaten bei einer Drehung des Koordinatensystems (Abb. 1-7).
ϕ+ϕ=ϕ−ϕ=
cosvsinuysinvcosux
⇔ ϕ+ϕ−=ϕ+ϕ=
cosysinxvsinycosxu
1 lat. transferre = hinübertragen, hinüberbringen
Prof. Dr. F.U. Mathiak, HS Neubrandenburg 7
Abb. 1-7: Drehung eines kartesischen Koordinatensystems
Definition 1-14
Transformation kartesischer Koordinaten in räumliche Zylinderkoordinaten
zzsinrycosrx
=ϕ=ϕ=
zzxyarctan
yxr 22
=
=ϕ
+=
Abb. 1-8: Räumliche Zylinderkoordinaten, ebene Polarkoordinaten und z-Richtung
Definition 1-15
Transformation kartesischer Koordinaten in räumliche Polarkoordinaten (Kugelkoordina-ten)
ϑ=ϑϕ=ϑϕ=
cosrzsinsinrysincosrx
zyx
arctan
xyarctan
zyxr
22
222
+=ϑ
=ϕ
++=
Definitionsbereiche: π≤ϑ≤π≤ϕ<π−
∞≤≤
0
r0
8
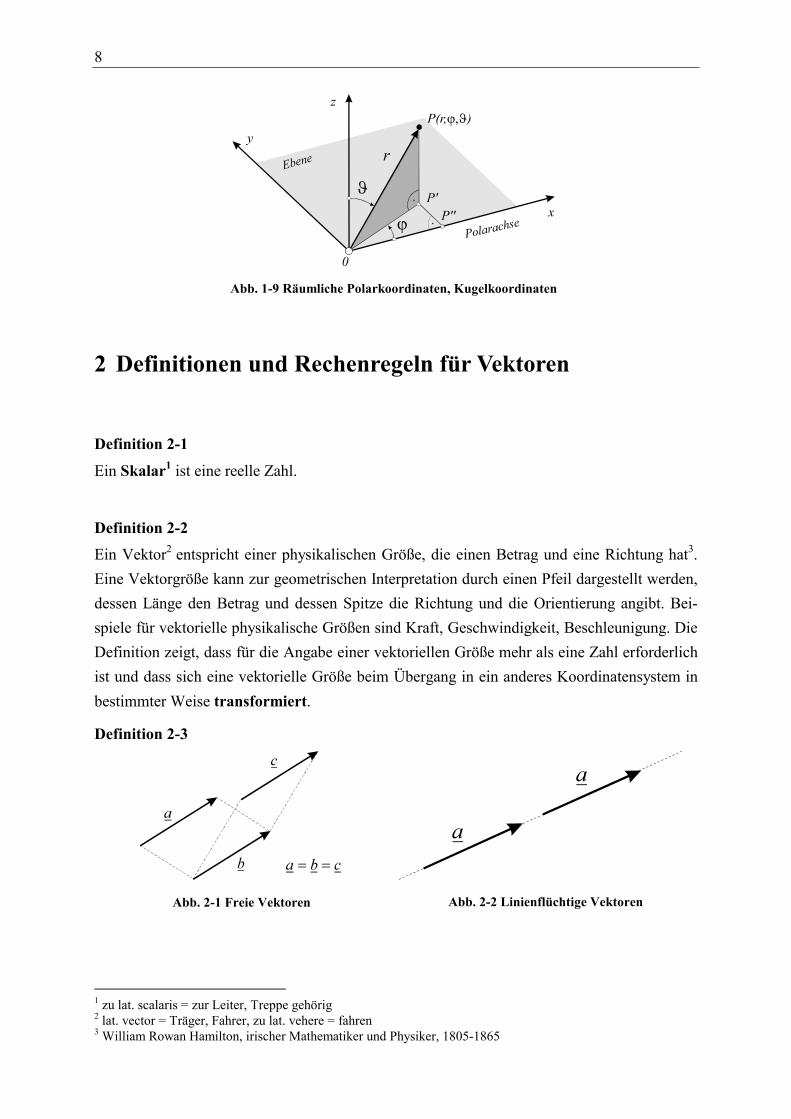
Abb. 1-9 Räumliche Polarkoordinaten, Kugelkoordinaten
2 Definitionen und Rechenregeln für Vektoren
Definition 2-1
Ein Skalar1 ist eine reelle Zahl.
Definition 2-2 Ein Vektor2 entspricht einer physikalischen Größe, die einen Betrag und eine Richtung hat3. Eine Vektorgröße kann zur geometrischen Interpretation durch einen Pfeil dargestellt werden, dessen Länge den Betrag und dessen Spitze die Richtung und die Orientierung angibt. Bei-spiele für vektorielle physikalische Größen sind Kraft, Geschwindigkeit, Beschleunigung. Die Definition zeigt, dass für die Angabe einer vektoriellen Größe mehr als eine Zahl erforderlich ist und dass sich eine vektorielle Größe beim Übergang in ein anderes Koordinatensystem in bestimmter Weise transformiert.
Definition 2-3
Abb. 2-1 Freie Vektoren
Abb. 2-2 Linienflüchtige Vektoren
1 zu lat. scalaris = zur Leiter, Treppe gehörig 2 lat. vector = Träger, Fahrer, zu lat. vehere = fahren 3 William Rowan Hamilton, irischer Mathematiker und Physiker, 1805-1865
Prof. Dr. F.U. Mathiak, HS Neubrandenburg 9
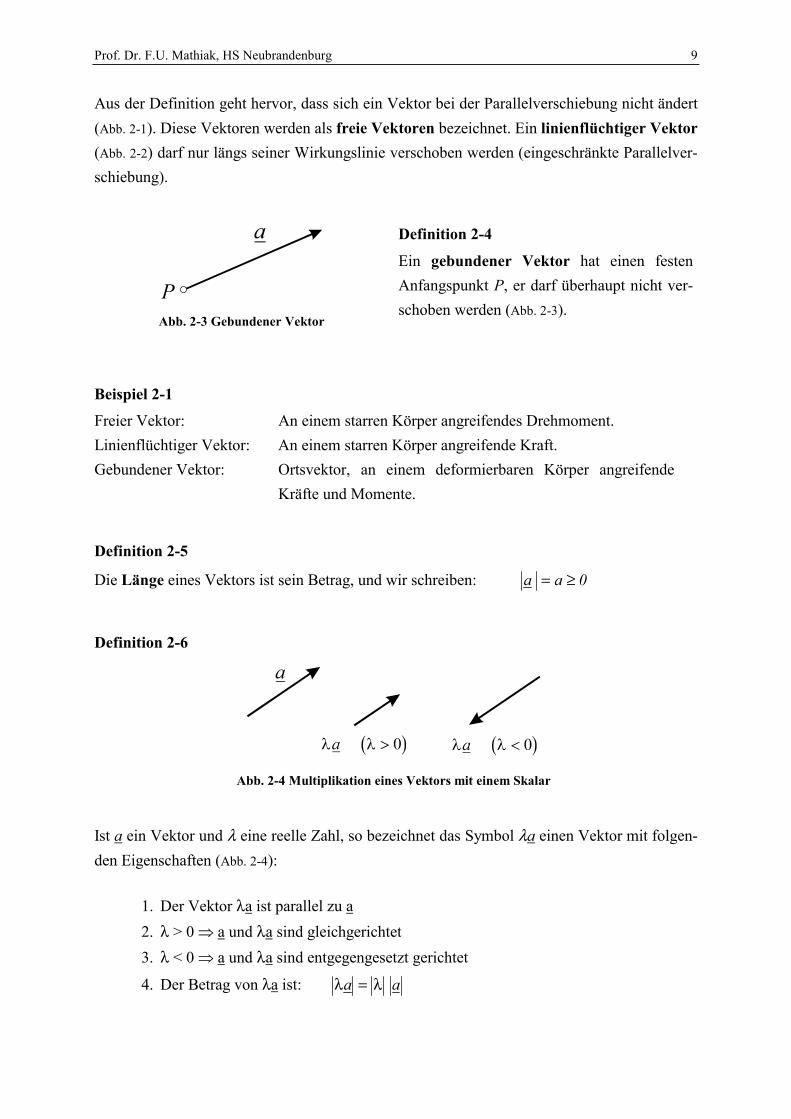
Aus der Definition geht hervor, dass sich ein Vektor bei der Parallelverschiebung nicht ändert (Abb. 2-1). Diese Vektoren werden als freie Vektoren bezeichnet. Ein linienflüchtiger Vektor (Abb. 2-2) darf nur längs seiner Wirkungslinie verschoben werden (eingeschränkte Parallelver-schiebung).
Abb. 2-3 Gebundener Vektor
Definition 2-4
Ein gebundener Vektor hat einen festen Anfangspunkt P, er darf überhaupt nicht ver-schoben werden (Abb. 2-3).
Beispiel 2-1 Freier Vektor: An einem starren Körper angreifendes Drehmoment. Linienflüchtiger Vektor: An einem starren Körper angreifende Kraft. Gebundener Vektor: Ortsvektor, an einem deformierbaren Körper angreifende
Kräfte und Momente.
Definition 2-5
Die Länge eines Vektors ist sein Betrag, und wir schreiben: 0aa ≥=
Definition 2-6
Abb. 2-4 Multiplikation eines Vektors mit einem Skalar
Ist a ein Vektor und λ eine reelle Zahl, so bezeichnet das Symbol λa einen Vektor mit folgen-den Eigenschaften (Abb. 2-4):
1. Der Vektor λa ist parallel zu a 2. λ > 0 ⇒ a und λa sind gleichgerichtet 3. λ < 0 ⇒ a und λa sind entgegengesetzt gerichtet
4. Der Betrag von λa ist: aa λ=λ

10
Es bedeuten weiterhin: λ = 1: Der Vektor a bleibt unverändert. λ = 0: Es entsteht ein Vektor vom Betrag 0, der Null-Vektor, der keine bestimmte
Richtung hat. λ = -1: Der Richtungssinn von a wird umgekehrt. Zwei parallele Vektoren können sich damit nur um einen skalaren Faktor unterscheiden.
Definition 2-7
Ein Einheitsvektor e ist durch e =1 definiert. Zu jedem Vektor a kann damit ein gleichge-
richteter Einheitsvektor gefunden werden (Abb. 2-5)
Abb. 2-5 Der Einheitsvektor
Da aa1 den Betrag 1
aaa
a1 == hat, gilt: a a
a0 =
Jeder Vektor lässt sich somit in der Form Betrag mal zugehöriger Einheitsvektor darstellen:
0aaa =
Definition 2-8
Abb. 2-6 Vektoraddition, Parallelogrammgesetz
Zwei Vektoren a und b wird durch den Ope-rator „+“ ein neuer Vektor zugeordnet, den man die Vektorsumme von a und b nennt. Zur Bildung von a und b wird b durch Paral-lelverschiebung im Endpunkt von a angetra-gen. Der Vektor a + b weist vom Anfangs-punkt von a zum Endpunkt von b.

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 11
Entsprechend Abb. 2-6 lässt sich die Vektorsumme auch derart bilden, dass der Vektor a durch Parallelverschiebung im Endpunkt von b angetragen wird. Der Vektor a + b weist vom An-fangspunkt von b zum Endpunkt von a.
Abb. 2-7 Subtraktion von Vektoren
Auf diese Weise entsteht ein Parallelogramm mit den orientierten Seiten a und b und der orientierten Diagonalen a + b, das in der Me-chanik die Anwendung beim Kräfteparalle-logramm findet. In entsprechender Weise lässt sich die Differenz a b a b− = + −( ) bil-
den.
Definition 2-9 Es gilt:
a) 0aa =−
b) a + b = b + a c) (a + b) + c = a + (b + c) = a + b + c Assoziativ-Gesetz (Abb. 2-8)
Abb. 2-8 Assoziativgesetz der Addition
Definition 2-10
Mit n Vektoren n321 a,...a,a,a , und mit den Koeffizienten ,,....,,, n321 λλλλ welche als reelle
Zahlen variabel sind, können wir eine lineare Schar von Vektoren bilden:
nn332211 a......aaa λ++λ+λ+λ
Wir nennen n Vektoren linear unabhängig, wenn sich aus ihnen durch Linearkombination der Nullvektor
0a......aaa nn332211 =λ++λ+λ+λ
nur durch 0..... n321 =λ==λ=λ=λ

12
bilden lässt. Andernfalls sind die Vektoren linear abhängig. Lineare Abhängigkeit bedeutet also, dass die obige Gleichung für wenigstens einen nicht verschwindenden Skalar λi erfüllt ist und damit nach einem Vektor aufgelöst werden kann. Unterstellen wirλ1 0≠ , erhalten wir
a1 als Linearkombination, Überlagerung oder Superposition:
n1
n3
1
32
1
21 a....aaa
λλ−−
λλ
−λλ−=
Die geometrische Bedeutung der linearen Abhängigkeit erkennen wir aus den folgenden Bei-spielen.
Beispiel 2-2 0,2n 21 ≠λλ=
Abb. 2-9 Kollineare Vektoren
Aus λ λ1 1 2 2 0a a+ = folgt, dass a1 und a2 ein
und derselben Geraden parallel sind. Die Vekto-ren a1 und a2 heißen dann kollinear. Alle Vek-toren, die zu einer Geraden (der Wirkungslinie von a1 ) parallel sind, lassen sich in der Form
a ag = λ 1 darstellen (Abb. 2-9).
Beispiel 2-3
unabhängiglineara,a;0,,,3n 21321 ≠λλλ= . Aus 0aaa 332211 =λ+λ+λ folgt,
dass a1, a2, a3 in einer Ebene liegen. Wir sagen: a1, a2, a3 sind komplanar1.
Definition 2-11 Jeder Vektor, der zu derjenigen Ebene parallel ist, die durch die beiden linear unabhängigen Vektoren a1 und a2 aufgespannt wird, lässt sich in der Form 2211e aaa +=
darstellen (Abb. 2-10)
Abb. 2-10 Komplanare Vektoren
1 zu lat. complanare = einebnen

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 13
Beispiel 2-4
unabhängiglineara,a,a;0,λ,λ,λλ,4n 3214321 ≠=
Im dreidimensionalen Raum gilt der
Satz 2-1 Mehr als 3 Vektoren sind stets linear abhängig. Zwischen 4 beliebigen Vektoren besteht also immer eine Beziehung
0aaaa 44332211 =λ+λ+λ+λ
Beispiel 2-5
Abb. 2-11 Basissystem im räumlichen Fall
Sind 321 a,a,a drei linear unabhängige Vek-
toren, so lässt sich jeder beliebige Vektor des dreidimensionalen Raumes durch Linear-kombination in 321 a,a,a darstellen, also:
332211r aaaa ++=
Satz 2-2
Drei linear unabhängige Vektoren bilden im Raum ein Basissystem Hinweis: Die zahlenmäßige Darstellung vektorieller Größen muss so erfolgen, dass wir ver-schiedene Vektoren auch ohne geometrische Anschauung miteinander vergleichen können. Dazu müssen wir im Raum ein Basissystem vorgeben. Da je drei beliebige, linear unabhängi-ge Vektoren eine Basis bilden, gibt es für die Darstellung ein und derselben vektoriellen Grö-ße unendlich viele verschiedene Möglichkeiten. Im Unterschied dazu ist die zahlenmäßige Angabe einer skalaren Größe von der Wahl des Bezugssystems unabhängig.
Definition 2-12
Ist die Basis durch die Vektoren 321
g,g,g gegeben, so heißt die Gleichung
332211 gagagaa ++=

14
die Komponentendarstellung1 des Vektors a zur Basis )3,2,1i(gi= .
aVektorsdesnKomponentega,ga,gaaVektorsdesnKoordinatea,a,a
332211
321
==
Je nach Anordnung der Basisvektoren
ig unterscheiden wir (Abb. 2-12) zwischen einem
Rechts- oder Linkssystem.
Abb. 2-12 Rechts- bzw. Linkssystem
Definition 2-13 Die Drehung von g
1auf dem kürzesten Wege in g
2und die Richtung von g
3 bilden ein
Rechtssystem.
Definition 2-14
Es seien zyx e,e,e drei Einheitsvektoren, die zueinander orthogonal sind (orthonormierte Ba-
sis). und in dieser Reihenfolge ein Rechtssystem bilden. Ein Vektor a kann dann als Summe der 3 Vektoren zzyyxx ea,ea,ea dargestellt werden (Abb. 2-13).
Abb. 2-13 Kartesische Koordinaten
Wir schreiben:
><=
++=
zyxzyx
zzyyxx
e,e,ea,a,aeaeaeaa
Hinweis: Die in Spitzklammern hinzugefügte Basis kann entfallen, wenn Verwechslungen ausgeschlossen sind. Für die Basisvektoren folgt dann die Komponentendarstellung
1 zu lat. componere = zusammenstellen

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 15
1,0,0e;0,1,0e;0,0,1e zyx ===
Den Betrag des Vektors a entnehmen wir der Abb. 2-13
2z
2y
2x aaaaa ++==
Abb. 2-14 Der Ortsvektor
Der Ortsvektor
r = x ex + y ey + z ez z,y,x=
ist ein gebundener Vektor. Er dient dazu, die Lage eines Punktes P im Raum anzugeben.
Definition 2-15
Den Zylinderkoordinaten r, ϕ, z werden die Basisvektoren er, eϕ, ez zugeordnet, die wie ex, ey, ez eine Orthonormalbasis bilden (Abb. 2-15). Dabei gelten die folgenden Beziehungen:
1,0,0ee
0,cos,sinecosesine0,sin,cosesinecose
zz
yx
yxr
==ϕϕ−=ϕ+ϕ−=
ϕϕ=ϕ+ϕ=
ϕ
und umgekehrt:
1,0,0ee0,cos,sinecosesine
0,sin,cosesinecose
zz
ry
rx
==ϕϕ=ϕ+ϕ=ϕ−ϕ=ϕ−ϕ=
ϕ
ϕ
Abb. 2-15 Zylinderkoordinaten

16
Ein beliebiger Vektor a kann dann sowohl auf die Basis ex, ey, ez als auch auf die Basis er, eϕ, ez bezogen werden. Statt
a = ax ex + ay ey + az ez = ax, ay, az ist dann
zrzzrr a,a,aeaeaeaa ϕϕϕ =++=
zu schreiben, und für den Betrag des Vektors a erhalten wir:
2z
22r aaaaa ++== ϕ
Mit den obigen Gleichungen folgt dann
zz
yx
yxr
aacosasinaa
sinacosaa
=
ϕ+ϕ−=
ϕ+ϕ=
ϕ
und umgekehrt:
zz
ry
rx
aacosasinaasinacosaa
=
ϕ+ϕ=
ϕ−ϕ=
ϕ
ϕ
Dabei ist zu beachten, dass ein Vektor a, je nachdem welchem Punkt im Raum wir ihn zuord-nen, zwar stets die gleichen Koordinaten ax, ay, az , jedoch jeweils andere Koordinaten ar, aϕ besitzt, da die Einheitsvektoren er und eϕ von ϕ abhängen (Abb. 2-16).
Abb. 2-16 Abhängigkeit des Vektors a von den Einheitsvektoren

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 17
Abb. 2-17 Ortsvektor in Zylinderkoordinaten
Der Ortsvektor r hat in Zylinderkoordina-ten, d.h. bei Bezugnahme auf die Ortho-normalbasis er, eϕ, ez die Form:
z,0,rr:.bzwezerr zr =+=
Achtung: Die Polarkoordinate r ist nicht mit dem Betrag des Ortsvektors zu ver-wechseln (Abb. 2-17).
Definition 2-16
Zwei Vektoren sind gleich, wenn sie komponentenweise gleich sind
zzyyxx ba,ba,baba ===⇔=
Einer Vektorgleichung im Raum entsprechen somit drei skalare Gleichungen.
Definition 2-17 Ein Vektor wird mit einem Skalar multipliziert, indem alle seine Komponenten mit dem Ska-lar multipliziert werden.
zyxzyx a,a,aa,a,aa λλλ=λ=λ
Definition 2-18
Für die Summe bzw. Differenz zweier Vektoren gilt:
zzyyxx ba,ba,baba ±±±=±
Definition 2-19
0,0,00 =
Der Nullvektor hat in jedem Bezugssystem die Koordinaten 0.
18
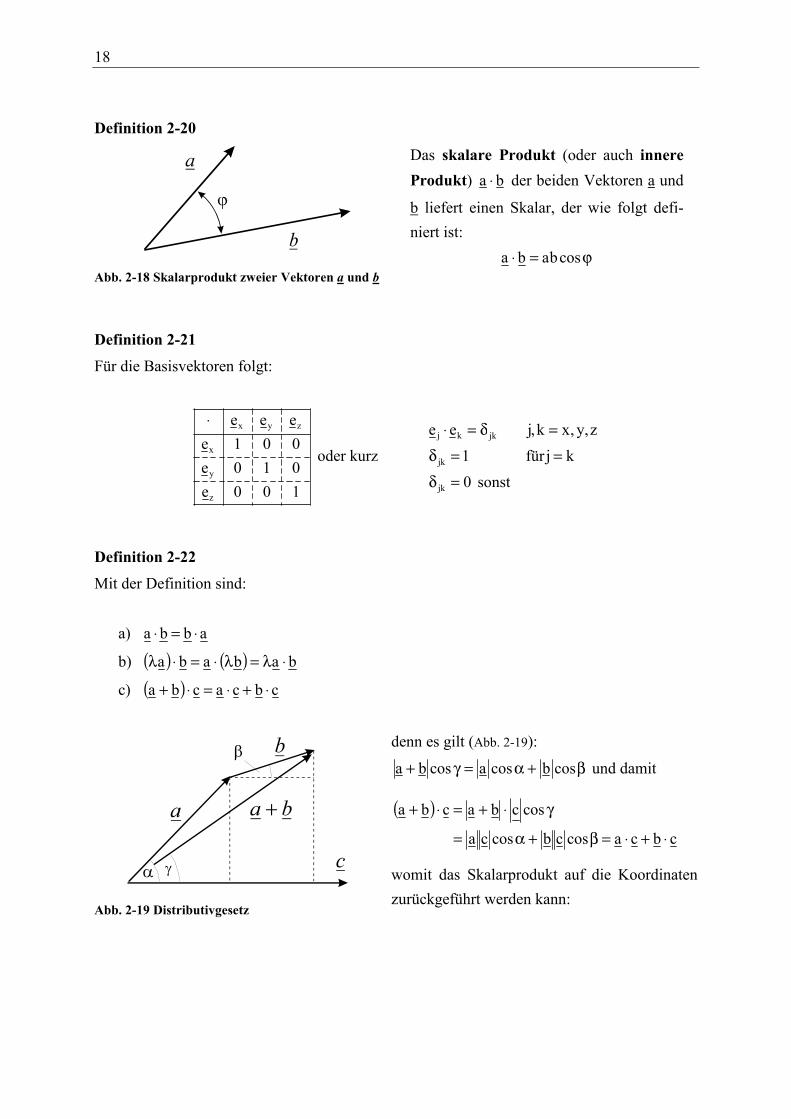
Definition 2-20
Abb. 2-18 Skalarprodukt zweier Vektoren a und b
Das skalare Produkt (oder auch innere Produkt) ba ⋅ der beiden Vektoren a und
b liefert einen Skalar, der wie folgt defi-niert ist:
ϕ=⋅ cosbaba
Definition 2-21 Für die Basisvektoren folgt:
100e010e001eeee
z
y
x
zyx⋅
oder kurz sonst0
kjfür1z,y,xk,jee
jk
jk
jkkj
=δ
==δ
=δ=⋅
Definition 2-22 Mit der Definition sind:
a) abba ⋅=⋅
b) ( ) ( ) bababa ⋅λ=λ⋅=⋅λ
c) ( ) cbcacba ⋅+⋅=⋅+
Abb. 2-19 Distributivgesetz
denn es gilt (Abb. 2-19):
β+α=γ+ cosbcosacosba und damit
( )cbcacoscbcosca
coscbacba
⋅+⋅=β+α=
γ⋅+=⋅+
womit das Skalarprodukt auf die Koordinaten zurückgeführt werden kann:

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 19
( ) ( )
zzzzyzyzxzxz
zyzyyyyyxyxy
zxzxyxyxxxxx
zzyyxxzzyyxx
eebaeebaeebaeebaeebaeebaeebaeebaeeba
ebebebeaeaeaba
⋅+⋅+⋅+⋅+⋅+⋅+⋅+⋅+⋅
=++⋅++=⋅
und damit
zzyyxx babababa ++=⋅
2z
2y
2x
2z
2y
2x
zzyyxx
bbbaaa
bababacos
++++
++=ϕ
Insbesondere gilt: 222z
2y
2x
2 aaaaaaaa ==++==⋅
Definition 2-23
Die Orthogonalitätsbedingung für zwei Vektoren ( )0b,a ≠ :
0bababa zzyyxx =++
Definition 2-24 Projektion eines Vektors auf eine vorgegebene Richtung
Abb. 2-20 Projektion von a auf die Richtung von b
Wir entnehmen der Abb. 2-20:
bbcosab
bb
bbcosabaa 2
0bb
ϕ=ϕ==
bzw.
bb
baa 2b⋅=
und damit der Betrag des Vektors ba
22bbb
ba
b
cosabbbcosaaa ⋅=ϕ=ϕ==
Liegt statt b ein Einheitsvektor e vor, so ist wegen e =1
( )eeaae ⋅=

20
und eaae ⋅=
Insbesondere gilt
zzyyxx eaaeaaeaa ⋅=⋅=⋅=
Für die Winkel zwischen einem Vektor a und den Basisvektoren gilt dann:
Abb. 2-21 Winkel zwischen a und dem Basisvektor ex
aacos;
aa
cosaacos z
zy
yx
x =α=α=α
Richtungskosinusse
1coscoscos z2
y2
x2 =α+α+α
Abb. 2-22 Richtungskosinusse des Einheitsvektors
Die Komponenten eines Einheits-vektors im orthonormierten Basis-system sind die Kosinusse der Win-kel zwischen dem Einheitsvektor und den Koordinatenachsen:
zyx cos,cos,cose ααα=

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 21
Definition 2-25
Das vektorielle Produkt (oder äußere Produkt) zweier Vektoren a und b wird ba× ge-
schrieben und wie folgt definiert (Abb. 2-23)
1. ba× ist ein Vektor.
2. ba× steht senkrecht auf a und senkrecht auf b.
3. a, b und ba× bilden in dieser Reihenfolge ein Rechtssystem.
4. Es ist ϕ=× sinbaba , also gleich dem Flächeninhalt A des von a und b gebildeten Paralle-
logramms.
Abb. 2-23 Das Vektorprodukt zweier Vektoren
Nach Definition 3 gilt für das Vektorprodukt das kommutative Gesetz nicht, vielmehr ist
abba ×−=×
Sind die beiden Vektoren a und b parallel, so ist ϕ = 0 oder ϕ = π, dann ist 0ba =× .
Es ist also 0ba =× für:
)oder0(b||a0bund0a0bund0a0bund0a
π=ϕ===≠≠=
Insbesondere ist also:
0aa =×
Für die Einheitsvektoren gilt:

22
0eeee0eeee0e
eee
xyz
xzy
yzx
zyx
−−
−×
Definition 2-26 Es gilt
a) ( ) ( ) ( ) babababa ×λ=λ×=×λ=×λ
b) ( ) cbcacba ×+×=×+
Definition 2-27 Zurückführung des Vektorproduktes auf die Koordinaten:
( ) ( ) =++×++=× zzyyxxzzyyxx ebebebeaeaeaba
zzzzyzyzxzxz
zyzyyyyyxyxy
zxzxyxyxxxxx
eebaeebaeebaeebaeebaeebaeebaeebaeeba
×+×+××+×+××+×+×
und
xyyxzxxzyzzy baba,baba,bababa −−−=×
dafür kann auch folgende Merkregel verwandt werden
zyx
zyx
zyx
bbbaaaeee
ba =×
Achtung: Merkregel gilt so nur bei Bezugnahme auf eine orthogonale normierte Vektorbasis.
Definition 2-28
Das Spatprodukt [ ]c,b,a ist definiert als das Volumen V des von den Vektoren a, b und c
gebildeten Parallelepipeds (Abb. 2-24)
( ) cbacoscbahAV ⋅×=ϕ×==

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 23
Abb. 2-24 Das Spatprodukt
Wir hätten auch
( )( ) bacV
acbV⋅×=⋅×=
erhalten können. Insgesamt ist dann
[ ] ( ) ( ) ( ) bacacbcbac,b,a ⋅×=⋅×=⋅×=
und es gilt die Regel von der zyklischen Vertauschbarkeit
[ ] [ ] [ ]b,a,ca,c,bc,b,a ==
und wegen ( ) ( ) ( ) cbacbaacb ⋅×≡×⋅=⋅× die (sinnvolle) Vertauschbarkeit von ×⋅ und
( ) ( )cbacba ×⋅=⋅×
Durch Ausrechnen von ( )a b c× ⋅ erhalten wir
[ ] ( ) ( ) ( ) zxyyxyzxxzxyzzy cbabacbabacbabac,b,a −+−+−=
wofür wir auch
[ ]zyx
zyx
zyx
cccbbbaaa
c,b,a =
hätten schreiben können. Für das Spatprodukt weisen wir noch die Beziehung

24
[ ] [ ]332313
322212
312111
321321
bababababababababa
b,b,ba,a,a⋅⋅⋅⋅⋅⋅⋅⋅⋅
=
nach, die für ,ab,ab,ab 332211 === in die Form
[ ]332313
322212
3121112
321
aaaaaaaaaaaaaaaaaa
a,a,a⋅⋅⋅⋅⋅⋅⋅⋅⋅
=
übergeht. Der Beweis erfolgt durch Ausrechnen mit z1y1x11 a,a,aa = usw.
Definition 2-29 Zerlegung eines Vektors in der Ebene nach zwei Richtungen. Der Vektor a in Abb. 2-25 soll in die vorgegebenen Richtungen a1 und a2 zerlegt werden, also 2211 aaa λ+λ= mit noch unbe-
kannten λ λ1 2und .
Abb. 2-25 Zerlegung eines Vektors in der Ebene
( )( ) ( ) ( )2211212
212112
22211
aaaaaa
aa|aaaaa|aaa
×λ=×⋅×
×⋅×λ=××λ+λ=
und damit ( ) ( )( )221
2121 aa
aaaa×
×⋅×=λ
entsprechend erhalten wir 2λ und damit ins-gesamt
( ) ( )
( )( ) ( )( )221
21122
21
2121 aa
aaaa;aa
aaaa×
×⋅×=λ×
×⋅×=λ
Wenn a1 und a2 parallel sind, so ist 0aa 21 =× , in diesem Falle ist keine Zerlegung möglich.
Sind in der Ebene mehr als zwei Richtungen vorgegeben, so ist die Zerlegung nicht eindeutig.
Definition 2-30 Zerlegung eines Vektors im Raum nach drei vorgegebenen Richtungen.
Prof. Dr. F.U. Mathiak, HS Neubrandenburg 25
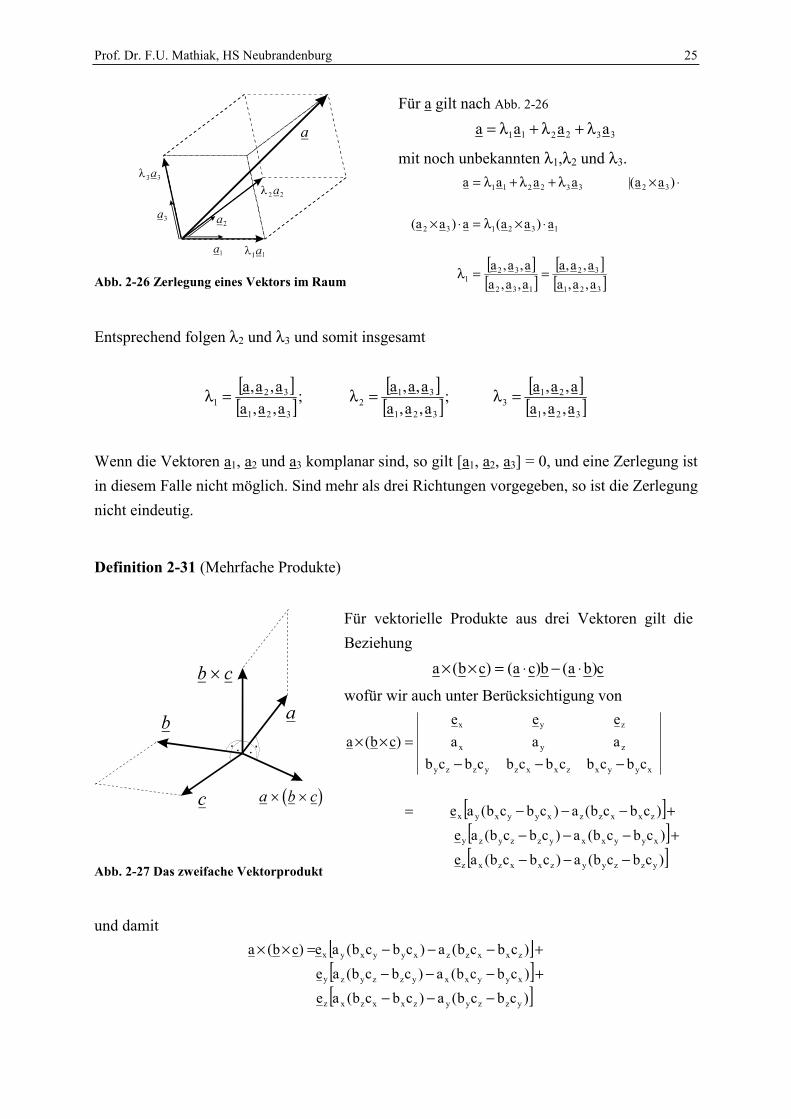
Abb. 2-26 Zerlegung eines Vektors im Raum
Für a gilt nach Abb. 2-26
332211 aaaa λ+λ+λ=
mit noch unbekannten λ1,λ2 und λ3.
[ ][ ]
[ ][ ]321
32
132
321
132132
32332211
a,a,aa,a,a
a,a,aa,a,a
a)aa(a)aa(
)aa(|aaaa
==λ
⋅×λ=⋅×
⋅×λ+λ+λ=
Entsprechend folgen λ2 und λ3 und somit insgesamt
[ ][ ]
[ ][ ]
[ ][ ]321
213
321
312
321
321 a,a,a
a,a,a;a,a,aa,a,a;
a,a,aa,a,a =λ=λ=λ
Wenn die Vektoren a1, a2 und a3 komplanar sind, so gilt [a1, a2, a3] = 0, und eine Zerlegung ist in diesem Falle nicht möglich. Sind mehr als drei Richtungen vorgegeben, so ist die Zerlegung nicht eindeutig.
Definition 2-31 (Mehrfache Produkte)
Abb. 2-27 Das zweifache Vektorprodukt
Für vektorielle Produkte aus drei Vektoren gilt die Beziehung
c)ba(b)ca()cb(a ⋅−⋅=××
wofür wir auch unter Berücksichtigung von
[ ][ ][ ])cbcb(a)cbcb(ae
)cbcb(a)cbcb(ae)cbcb(a)cbcb(ae
cbcbcbcbcbcbaaaeee
)cb(a
yzzyyzxxzxz
xyyxxyzzyzy
zxxzzxyyxyx
xyyxzxxzyzzy
zyx
zyx
−−−
+−−−
+−−−=
−−−=××
und damit
[ ][ ][ ])cbcb(a)cbcb(ae
)cbcb(a)cbcb(ae
)cbcb(a)cbcb(ae)cb(a
yzzyyzxxzxz
xyyxxyzzyzy
zxxzzxyyxyx
−−−
+−−−
+−−−=××

26
schreiben können. Geometrisch ist sofort einleuchtend, dass der Vektor )cb(a ×× in der
durch b und c aufgespannten Ebene liegt, da er zu cb× orthogonal ist. Für zweifache Vektor-
produkte gilt das Assoziativgesetz nicht: c)ba()cb(a ××≠××
Definition 2-32 Es gilt: a) )cb)(da()db)(ca()dc()ba( ⋅⋅−⋅⋅=×⋅×
b)
[ ] [ ][ ] [ ]dc,b,acd,b,a
ad,c,bbd,c,a)dc()ba(−=−=×××
c) 0)ba(c)ac(b)cb(a =××+××+××
d) 2222 )ba(ba)ba( ⋅−=×
Definition 2-33 Zerlegung eines Vektors a in zwei Komponenten, von denen eine parallel zu einem vorgege-benen Vektor e und die andere Komponente dazu senkrecht steht (Abb. 2-28), also
⊥+= aaa ||
Abb. 2-28 Vektorzerlegung parallel und senkrecht zu einer vorgegebenen Richtung
Mit e)ea(a|| ⋅= gilt: )ea(ee)ea(a)ee(e)ea(aaaa || ××=⋅−⋅=⋅−=−=⊥
und somit (Abb. 2-28)
ee||
)ea(ee)ea(a⊥
××+⋅=

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 27
3 Definitionen und Rechenregeln für Matrizen
Definition 3-1
Eine Matrix1 ist ein geordnetes Schema von Zahlen aik mit m Zeilen und n Spalten der Form
( )
=×
mn2m1m
n22221
n11211
nm
aaa
aaaaaa
A
Außer dem Zahlenwert eines Elementes aik ∈ R der Matrix A ist auch seine durch den Dop-
pelindex i,k festgelegte Stellung im Schema, seine Zeilennummer i und seine Spaltennummer
k entscheidend. Eine Matrix mit m Zeilen und n Spalten ist eine Matrix vom Typ nm× (ge-
sprochen: m-Kreuz-n) oder kurz eine nm× -Matrix. Einzeilige Matrizen A( n1× ) werden Zei-
lenvektoren und einspaltige Matrizen A( 1m× ) werden Spaltenvektoren genannt und mit
kleinen Buchstaben bezeichnet. Es ist Tia der i-te Zeilenvektor
( )in2i1iTi aaaa =
und ak der k-te Spaltenvektor
=
mk
k2
k1
k
a
aa
a
Spezielle Matrizen
a) Nullmatrix ( )nm
0×
alle n,,1j,m,,1i,0a ij …… ===
b) Quadratische Matrix m = n
c) Diagonalmatrix m = n, 0a ij = für ji ≠
1 lat. Quelle, Ursache

28
( )
=×
mm
22
11
mm
a00000a000a
D
…
d) Einheitsmatrix der Ordnung m
)mm(I×
, 1a,ji,0a iiij =≠=
( )
=×
1000010001
Imm
Definition 3-2
Zwei Matrizen sind gleich, wenn sie in allen Elementen übereinstimmen:
( ) ( ) ijijnmnmbaBA =⇔=
×× für alle i,j
Definition 3-3
Zu jeder Matrix A wird eine transponierte1 Matrix AT nach folgender Vorschrift gebildet:
( ) ( )
=
=××
mnn2n1
2m2212
1m2111
T
mn
mn2m1m
n22221
n11211
nm
aaa
aaaaaa
A
aaa
aaaaaa
A
oder kurz ( ) ( )kiT
ik aAaA ==
( ) ( )
=
=×× 623
451A
642531
A T
3223
Satz 3-1
Es gilt: ( ) AA TT =
1 lat. transponere = übersetzen, hinüberschaffen lassen
Prof. Dr. F.U. Mathiak, HS Neubrandenburg 29
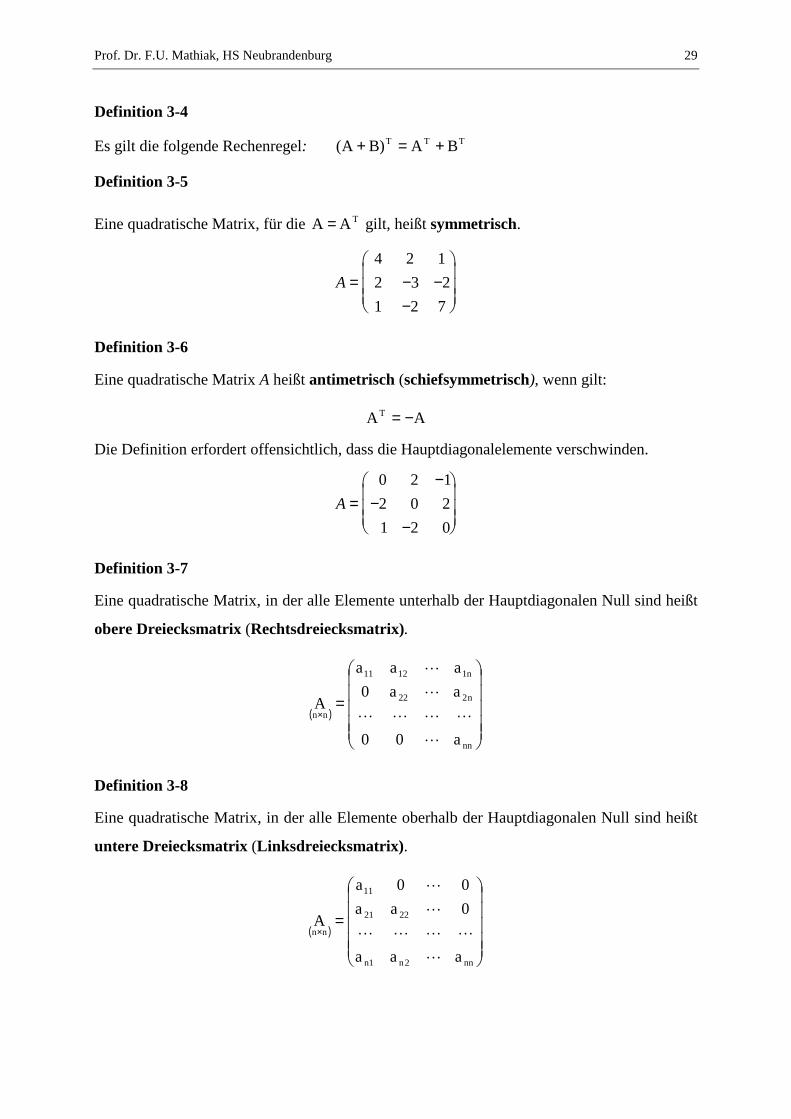
Definition 3-4
Es gilt die folgende Rechenregel: TTT BA)BA( +=+
Definition 3-5
Eine quadratische Matrix, für die TAA = gilt, heißt symmetrisch.
A = − −−
4 2 12 3 21 2 7
Definition 3-6
Eine quadratische Matrix A heißt antimetrisch (schiefsymmetrisch), wenn gilt:
AAT −=
Die Definition erfordert offensichtlich, dass die Hauptdiagonalelemente verschwinden.
A =−
−−
0 2 12 0 21 2 0
Definition 3-7
Eine quadratische Matrix, in der alle Elemente unterhalb der Hauptdiagonalen Null sind heißt
obere Dreiecksmatrix (Rechtsdreiecksmatrix).
( )
=×
nn
n222
n11211
nn
a00
aa0aaa
A
Definition 3-8
Eine quadratische Matrix, in der alle Elemente oberhalb der Hauptdiagonalen Null sind heißt
untere Dreiecksmatrix (Linksdreiecksmatrix).
( )
=×
nn2n1n
2221
11
nn
aaa
0aa00a
A

30
Definition 3-9
Zwei Matrizen gleicher Dimension werden addiert (subtrahiert), indem ihre entsprechenden Elemente addiert (subtrahiert) werden.
( ) ( ) ( ) ijijijnmnmnmbacBAC ±=⇔±=
×××; n,,1j,m,,1i …… ==
Definition 3-10
Eine Matrix A wird mit einem Skalar λλλλ multipliziert, indem jedes Element der Matrix mit λ
multipliziert wird:
( ) ( ) ijijnmnmabAB λ=⇔λ=
××, n,,1j,m,,1i …… ==
λλλ
λλλλλλ
==λ=
mn2m1m
n22221
n11211
aaa
aaaaaa
AAB
Satz 3-2
Für Matrizen gleicher Dimension gilt:
a) AA00A =+=+ b) ( ) 0AA =−+
c) ABBA +=+ d) ( ) ( ) CBACBACBA ++=++=++
e) ( ) BABA λ+λ=+λ f) ( ) AAA 2121 λ+λ=λ+λ
Definition 3-11
Es sei A eine nm× und B eine pn× Matrix, dann gilt für die Produktmatrix BAC ⋅= ,
dass sie die Dimension pm× hat und dass sich ihre Elemente ijc als Skalarprodukt aus dem
i-ten Zeilenvektor von A und dem j-ten Spaltenvektor von B ergeben:
( ) ( )( )p21pn
Tm
T2
T1
nmb,,b,bB
a
aa
A …
=
=××
∑=
==n
1kkjikj
Tiij babac , m,,2,1i …= ; p,,2,1j …=

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 31
Beispiel 3-1
2 4 63 6 9
3 1 3 54 3 2 02 6 4 4
2 26 10 143 39 15 21
−− −
⋅
−
−
=
−− − −
oder auch
2 4 63 6 9
1 2 0 03 4 4 52 1 1 1
2 26 10 143 39 15 21
−− −
⋅ − −
−
=
−− − −
Für die Matrizenmultiplikation gilt nicht das Kommutativgesetz, d.h., i.a. ist:
ABBA ⋅≠⋅
.453576321
AB;733515724
BA;101210001
B;132312321
A
=⋅
=⋅
=
=
Einheitsmatrizen reproduzieren beim Multiplizieren, sie spielen also die Rolle der 1 beim
Multiplizieren reeller Zahlen:
1 0 00 1 00 0 1
1 2 32 1 32 3 1
1 2 32 1 32 3 1
1 2 32 1 32 3 1
1 0 00 1 00 0 1
⋅
=
=
⋅
1 0 00 1 00 0 1
1 22 12 3
1 22 12 3
1 22 12 3
1 00 1
⋅
=
=
⋅
Satz 3-3
Es gilt:
( ) ( ) ( ) ( ) ( )pmpmpnnmnmCBCACBA
×××××⋅+⋅=⋅
+
( ) ( ) ( ) ( ) ( )pmpmpnpnnmCABACBA
×××××⋅+⋅=
+⋅
Definition 3-12
Der Zeilenrang (Spaltenrang) einer Matrix ist die Anzahl der linear unabhängigen Zeilen
(Spalten) der Matrix.

32
Satz 3-4
Der Zeilenrang einer beliebigen Matrix ist immer gleich dem Spaltenrang. Es gilt, dass der Rang von A nie größer ist als das Minimum aus Zeilenzahl und Spaltenzahl:
)n,mmin()A(rg ≤ .
Andernfalls heißt A singulär.
Definition 3-13
Unter der Voraussetzung, dass die Produkte herstellbar sind, gilt für die Matrizenmultiplikati-
on das Assoziativgesetz:
)CB(AC)BA( ⋅⋅=⋅⋅
Definition 3-14
Eine Matrix A wird mit einem Faktor λ multipliziert, indem jedes Element der Matrix mit λ
multipliziert wird:
)a()a(A ikik λ=λ=λ
bzw.:
λλλ
λλλλλλ
=λ=λ
mn2m1m
n22221
n11211
aaa
aaaaaa
AA
Definition 3-15
Für das Transponieren von Matrizenprodukten gilt:
TTTTT AB)BA(,A)A( ⋅=⋅λ=λ
Hinweis: Das Produkt zweier Matrizen kann die Nullmatrix sein, ohne dass einer der beiden
Faktoren die Nullmatrix ist.
2 4 63 6 9
3 1 3 54 3 2 02 6 4 4
2 4 63 6 9
1 2 0 03 4 4 52 1 1 1
−− −
⋅
−
−
=
−− −
⋅ − −
−
daraus folgt mit dem Distributivgesetz für die Matrizenmultiplikation

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 33
2 4 63 6 9
3 1 3 54 3 2 02 6 4 4
1 2 0 03 4 4 52 1 1 1
0 0 00 0 0
−− −
⋅
−
−
− − −
−
=
oder
2 4 63 6 9
2 1 3 51 7 6 50 5 5 5
0 0 00 0 0
−− −
⋅
− −−−
=
Dieses Beispiel zeigt, dass es nicht möglich ist, generell eine Division für Matrizen zu erklä-
ren, denn dann könnten wir in der Gleichung
2 4 63 6 9
3 1 3 54 3 2 02 6 4 4
2 4 63 6 9
1 2 0 03 4 4 52 1 1 1
−− −
⋅
−
−
=
−− −
⋅ − −
−
durch die von der Nullmatrix verschiedene Matrix
2 4 63 6 9
−− −
dividieren, was offensichtlich zu einem Widerspruch führen würde.
3.1 Die inverse Matrix
Wir betrachten zunächst das lineare Gleichungssystem
221
121
ax7x2ax3x
=+=+
a1, a2 ∈ R gegeben. In Matrizenschreibweise lässt sich das Gleichungssystem mit Einführung
von
=
=
=
2
1
2
1
aa
a,xx
x,7231
A
in der Form
axA =⋅
schreiben. Die Lösung lautet:

34
212
211
aa2xa3a7x
+−=−=
die mit
−−
=1237
X
die Gestalt
aXx ⋅=
annimmt. Also haben wir einerseits
aaXAxA =⋅⋅=⋅
und andererseits
xAXaXx ⋅⋅=⋅=
so dass offenbar XA ⋅ das a und AX ⋅ das x beim Multiplizieren reproduziert. Durch Aus-
rechnen bestätigen wir sofort:
==⋅=⋅
1001
IAXXA
Definition 3-16
Die quadratische mm× Matrix X mit der Eigenschaft IXAAX =⋅=⋅ heißt inverse Matrix
von A. Dabei ist A eine reguläre mm× Matrix und I die mm× Einheitsmatrix.
Wir schreiben:
1AX −=
Definition 3-17
Die Inverse A-1 der Matrix A kann aus der Definitionsgleichung
IAAAA 11 =⋅=⋅ −−
berechnet werden.
Beispiel 3-2
Für n = 3 und X = A-1 gilt:

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 35
=
⋅
100010001
xxxxxxxxx
aaaaaaaaa
333231
232221
131211
333231
232221
131211
Der obigen Gleichung entsprechen 3 lineare Gleichungssysteme zur Bestimmung der Koeffi-
zienten xij von A-1:
1xaxaxa0xacaxa0xaxaxa
0xaxaxa1xaxaxa0xaxaxa
0xaxaxa0xaxaxa1xaxaxa
333323321331
332323221321
331323121311
323322321231
322322221221
321322121211
313321321131
312321221121
311321121111
=++=++=++
=++=++=++
=++=++=++
Satz 3-5
Die Inverse einer oberen (unteren) Dreiecksmatrix ist wieder eine obere (untere) Dreiecksmat-
rix.
Beispiel 3-3 (obere Dreiecksmatrix, n = 3):
Aus der obigen Gleichung folgt
1xa0xaxa0xaxaxa
0xa1xaxa0xaxaxa
0xa0xaxa1xaxaxa
3333
33232322
331323121311
3233
32232222
321322121211
3133
31232122
311321121111
==+=++
==+=++
==+=++
und durch rekursive Auflösung
( )2312331311
132211
1212
1111
3322
2323
222221
33333231
xaxaa1xx
aax
a1x
xaa
xa1x0x
a1x0x0x
+−=−==
−===
===
also
=−
33
2322
1312111
x00xx0xxx
A

36
Besonders einfach ist die Invertierung einer Diagonalmatrix. Aus
=
33
22
11
a000a000a
A folgt
=−
33
22
11
1
a100
0a10
00a1
A
Satz 3-6
Es gilt:
a) ( ) ( )T11T AA −− = b) ( ) AA 11 =−− c) 111 AB)BA( −−− ⋅=⋅
d) ( ) 0,A1A 11 ≠λλ
=λ −− e) A1A 1 =−
Satz 3-7
Die inverse Matrix A-1 einer regulären mm× Matrix A berechnet sich folgendermaßen:
( )( )( )
( )
−
−+−+−−+−−+−+
=
+
+
+
+
−
mmm1m1
113m
332313
112m
322212
111m
312111
1
AA1
A1AAAA1AAAA1AAA
A1A
Satz 3-8
Eine quadratische mm× Matrix A besitzt dann und nur dann eine Inverse, wenn
a) ihre Determinante von Null verschieden ist,
b) der Rang von A gleich m ist,
c) A regulär ist,
d) die Spalten und Zeilen von A eine Basis im Rn bilden.

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 37
4 Determinanten
Definition 4-1
Eine n-reihige Determinante1 ist eine Zahl, die aus gegebenen n2 Zahlen aik nach einer noch zu bestimmenden Vorschrift gebildet wird.
nnnk2n1n
inik2ia
n2k22221
n1k11211
ikik
aaaa
aaaa
aaaaaaaa
a)adet(D1i
===
Zeilen und Spalten heißen allgemein Reihen. Definition 4-2 (Rechenvorschrift zur Bestimmung der Determinante)
Im Fall n = 1 wird 111111 aa)adet( ==
Für die Fälle n = 2, 3, 4,... wird der Begriff der n-reihigen Determinante durch die Vorschrift
1n,n2n1n
1n,33231
1n,22221
n11n
nn4n2n1n
n3343231
n2242221
13
nn4n3n1n
n3343331
n2242321
12
nn3n2n
n33332
n22322
11
nn2n1n
n22221
n11211
aaa
aaaaaa
a)1(
aaaa
aaaaaaaa
a
aaaa
aaaaaaaa
a
aaa
aaaaaa
a
aaa
aaaaaa
−
−
−
+ ⋅−++−⋅+
+⋅−⋅=
auf den Begriff der (n-1)-reihigen Determinante oder auch Unterdeterminante zurückgeführt.
1 Gottfried Wilhelm Leibniz, deutsch. Mathematiker und Philosoph, 1646-1716

38
Beispiel 4-1 (n = 2):
bcadcbdadcba
−=⋅−⋅=
Definition 4-3
Entfernen wir aus dem Zahlenschema |aik| die i-te Zeile und die k-te Spalte und rücken die verbleibenden Elemente wieder zu einer Determinante zusammen, so entsteht die zum Ele-ment aik gehörige Unterdeterminante Dik. Sie ist von der Ordnung n-1. Beispiel 4-2 (n = 3):
3332
131221
333231
232221
131211
aaaa
Daaaaaaaaa
=⇒
Aus den n2 Elementen einer n-reihigen Determinante lassen sich n2 Unterdeterminanten der Ordnung n-1 bilden.
Definition 4-4
Unter dem Rang einer Matrix versteht man die höchste Ordnung, die deren nicht verschwin-dende Unterdeterminanten haben können. Hinweis: Um den Rang einer Matrix zu bestimmen, sind alle Unterdeterminanten der Ord-nung l zu betrachten, wobei l entweder die kleinere der beiden Zahlen m und n für nm ≠ oder l = m = n ist. Ist wenigstens eine dieser Determinanten 0≠ , so ist der Rang der Matrix A gleich l. Verschwinden sie jedoch alle, dann sind die Unterdeterminanten l - 1 zu betrachten usw. In der praktischen Anwendung ist es jedoch besser, umgekehrt zu verfahren, d.h., von Unterdeterminanten geringerer Ordnung zu denen höherer Ordnung überzugehen, und dabei folgende Regel zu beachten: Hat man eine nichtverschwindende Unterdeterminante k-ter Ord-nung gefunden, so sind nur noch die Unterdeterminanten der Ordnung (k + 1) zu betrachten, sich durch Ränderung von Dk ergeben
……
kD
……
kD
……
kD
kD
Sind dann alle diese Unterdeterminanten der Ordnung (k + 1) gleich Null, dann ist der Rang der Matrix gleich k.

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 39
Beispiel 4-3
Gesucht wird der Rang der Matrix
−−−
−−−
=
54474131102412101342
A
Die Matrix A enthält in der oberen linken Ecke eine Unterdeterminante zweiter Ordnung
02142
D2 =−−
= . Es existiert jedoch eine Unterdeterminante zweiter Ordnung, die nicht ver-
schwindet: 021234
D2 ≠=−−
=′ . Rändern dieser Unterdeterminante links und unten liefert:
01110121342
D3 ≠=−
−−
= . Durch Rändern von D3 erhalten wir1
0
4474311041211342
D4 =
−−−
−−−
= und 0
5474111021210342
D4 =
−−
−−
=′
Somit ist der Rang von A gleich 3
Definition 4-5
Es existieren 2n Möglichkeiten zur Berechnung einer n-reihigen Determinante. Entwicklung nach den Elementen der i-ten Zeile (= n Möglichkeiten)
ni1Da)1(Dn
1kikik
ki ≤≤−=∑=
+
Entwicklung nach den Elementen der k-ten Spalte (= n Möglichkeiten)
nk1Da)1(Dn
1iikik
ki ≤≤−=∑=
+
1 das ist nur auf zwei verschiedene Arten möglich
40
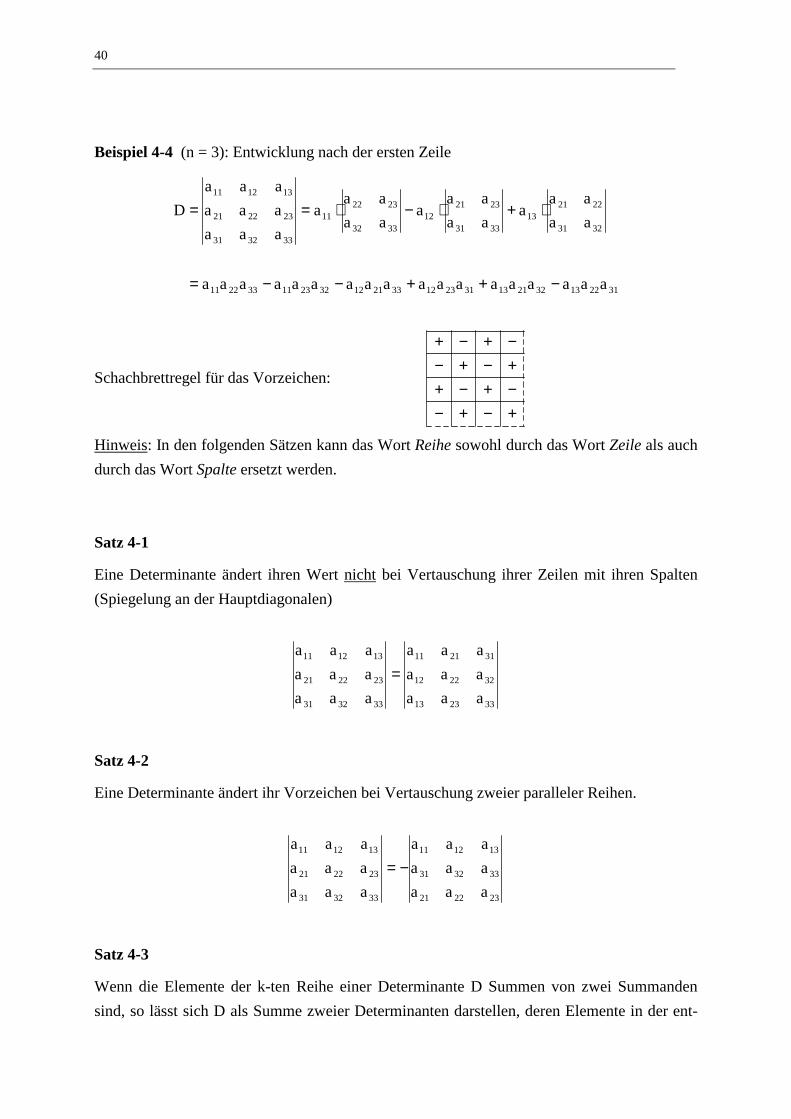
Beispiel 4-4 (n = 3): Entwicklung nach der ersten Zeile
312213322113312312332112322311332211
3231
222113
3331
232112
3332
232211
333231
232221
131211
aaaaaaaaaaaaaaaaaa
aaaa
aaaaa
aaaaa
aaaaaaaaaa
D
−++−−=
⋅+⋅−⋅==
Schachbrettregel für das Vorzeichen:
+ − + −− + − ++ − + −− + − +
Hinweis: In den folgenden Sätzen kann das Wort Reihe sowohl durch das Wort Zeile als auch durch das Wort Spalte ersetzt werden.
Satz 4-1
Eine Determinante ändert ihren Wert nicht bei Vertauschung ihrer Zeilen mit ihren Spalten (Spiegelung an der Hauptdiagonalen)
332313
322212
312111
333231
232221
131211
aaaaaaaaa
aaaaaaaaa
=
Satz 4-2
Eine Determinante ändert ihr Vorzeichen bei Vertauschung zweier paralleler Reihen.
232221
333231
131211
333231
232221
131211
aaaaaaaaa
aaaaaaaaa
−=
Satz 4-3
Wenn die Elemente der k-ten Reihe einer Determinante D Summen von zwei Summanden sind, so lässt sich D als Summe zweier Determinanten darstellen, deren Elemente in der ent-
Prof. Dr. F.U. Mathiak, HS Neubrandenburg 41
sprechenden k-ten Reihe jene Summanden sind und in den übrigen Reihen mit D überein-stimmen.
4444241
3433231
2422221
1411211
4444241
3433231
2422221
1411211
44444241
34333231
24222221
14111211
cbcccbcccbcccbcc
cacccacccacccacc
cbacccbacccbacccbacc
+=
++++
Satz 4-4
Ein den Elementen einer Reihe gemeinsamer Faktor darf vor die Determinante gezogen wer-den.
333231
232221
131211
333231
232221
131211
aaaaaaaaa
aaaaaaaaa
⋅λ=λλλ
Satz 4-5
Sind die Elemente einer Reihe lauter Nullen, so hat die Determinante den Wert Null.
0aaa000
aaa
333231
131211
=
Satz 4-6
Sind die Elemente zweier paralleler Reihen zueinander proportional, oder stimmen zwei Rei-hen überein, so hat die Determinante den Wert Null.
0aaaaaaaaa
0aaaaaaaaa
232221
232221
131211
333131
232121
131111
==λλλ
Satz 4-7
Sind A und B beliebige quadratische n-reihige Matrizen, so gilt:
BABA =⋅
Beispiel 4-5
Berechnung der Determinante einer oberen Dreiecksmatrix

42
33221133221133
232211
33
2322
131211
aaaaaaa0aa
aa00aa0aaa
===
Satz 4-8
Besitzt eine n-reihige Determinante obere oder untere Dreiecksgestalt, so errechnet sich die Determinante aus dem Produkt der Hauptdiagonalglieder:
∏=
==n
1iiiik a)adet(D
5 Lineare Gleichungssysteme
Definition 5-1
Unter einem linearen Gleichungssystem (LGS) verstehen wir m lineare Gleichungen, in de-nen n Unbekannte x1, x2, x3,..., xn auftreten. Hierbei sind die Koeffizienten ija (i = 1...m, j =
1...n) und die Absolutglieder der rechten Seite m,,1ibi …== gegeben.
mnmn22m11m
2nn2222112
1nn1212111
bxaxaxa
bxaxaxabxaxaxa
=+++
=+++=+++
…
…
…
Mit den Vektoren
=
=
=
m
1
mn
n1
n
1m
11
1
b
bb,,
a
aa,,
a
aa ……
erhalten wir die vektorielle Darstellung des LGS
bxaxaxa nn2211 =+++ …
Mit ( )
==
mn2m1m
n22221
n11211
n1
aaa
aaaaaa
a,,aA
… und
=
m
2
1
x
xx
x

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 43
folgt die Matrixdarstellung des LGS
bxA =⋅
Ein LGS heißt homogen, wenn 0bbb m21 ==== … sind. Andernfalls heißt es inhomogen.
Beispiel 5-1 (Inhomogenes LGS mit 3 Gleichungen für 3 Unbekannte x1, x2, x3)
5x2x2x5xxx21xx3x4
321
321
321
−=−+=+−
−=−+
mit
−
−=
=
=
−−
−=
551
bbb
b;xxx
x;221112134
A
3
2
1
3
2
1
.
Definition 5-2
Ein Zahlentupel ( n21 x,,x,x … ) nR∈ , welches alle m Gleichungen des LGS erfüllt, heißt
Lösung des LGS. Die Menge aller Lösungen heißt Lösungsmenge des LGS.
Satz 5-1
Bei homogenen LGS ist jedes Vielfache der Lösung wieder eine Lösung.
Satz 5-2
Ein inhomogenes LGS von n Gleichungen mit n Unbekannten besitzt bei regulärer Koeffi-zientenmatrix genau eine Lösung.
Satz 5-3
Ein homogenes LGS von n Gleichungen mit n Unbekannten besitzt bei regulärer Koeffizien-tenmatrix nur die triviale Lösung 0xxx n21 ==== … .

44
Satz 5-4 (Die Cramersche Regel)
Gegeben sei ein inhomogenes LGS von n Gleichungen mit n Unbekannten mit einer regulärer Koeffizientenmatrix in der vektoriellen Darstellung
bxaxaxa nn2211 =+++ … ,
dann hat der Lösungsvektor die Komponenten
AA
a,,a,,a,aa,,a,b,a,,a
x k
nk21
n1k1k1k == +−
……
……
, .n,,2,1k …=
wobei |A| die Determinante von A und |Ak| diejenige Determinante ist, die aus A entsteht, wenn wir in A die k-te Spalte durch die Spalte der rechten Seite ersetzten1.
5x2x2x5xxx21xx3x4
321
321
321
−=−+=+−
−=−+
10225115131
D1 =−−
−−−
= 10251152114
D2 −=−−
−−=
20521512134
D3 =−
−−
= 10221112134
D =−
−−
=
21020
DD
x;11010
DDx;1
1010
DDx 3
32
21
1 ===−=−=====
Definition 5-3
Zwei Gleichungssysteme heißen äquivalent, wenn sie die gleiche Lösungsmenge besitzen.
1 Gabriel Cramer, schweizer. Mathematiker, 1704-1752
Prof. Dr. F.U. Mathiak, HS Neubrandenburg 45
Satz 5-5
Zwei LGS sind genau dann äquivalent, wenn sie sich durch a) Vertauschen zweier Gleichungen (Zeilen) miteinander, b) Multiplikation einer Gleichung (Zeile) mit einer reellen Zahl 0≠α , c) Addition des Vielfachen einer Gleichung (Zeile) zu einer anderen Gleichung (Zeile) ineinander überführen lassen. Gaußscher Algorithmus Ein LGS wird durch äquivalente Umformungen auf Dreiecksgestalt gebracht. Dieses äquiva-lente Gleichungssystem lässt sich rekursiv lösen.
Satz 5-6
Ein homogenes LGS von n Gleichungen mit n Unbekannten besitzt genau dann nichttriviale Lösungen, wenn der Rang r der Koeffizientenmatrix kleiner als n ist. Die Lösungsmenge ent-hält n-r freie Parameter. Sie hat die Dimension n-r.
Satz 5-7
Ein inhomogenes LGS von n Gleichungen mit n Unbekannten und Rang von A gleich nr <
besitzt nur dann Lösungen, wenn der Rang von ( )bA auch gleich r ist.
Satz 5-8
Ein LGS mit m Gleichungen und n Unbekannten hat genau dann mindestens eine Lösung,
wenn der Rang der Koeffizientenmatrix A und der Rang der erweiterten Matrix ( )bA überein-
stimmen.
Definition 5-4
Für ein homogenes LGS von n Gleichungen mit n Unbekannten heißt jede Zahl λ i, für die die Gleichung
( ) 0xEA =⋅λ−
nichttriviale Lösungen besitzt, Eigenwert von A. Notwendige Bedingung dafür ist

46
0EA =λ− ,
oder:
0
aaa
aaaaaa
nn2n1n
n22221
n11211
=
λ−
λ−λ−
Die nichttrivialen Lösungen x des homogenen Gleichungssystems ( ) 0xEA =⋅λ− können bei
bekannten Eigenwerten λ i (i = 1, n) berechnet werden. Sie werden Eigenvektoren xi der
Matrix A zum Eigenwert iλλλλ genannt. Der k-te Eigenvektor genügt der Gleichung
( ) 0xEA kk =⋅λ−
Beispiel 5-2 (n = 3)
0aaaaaaaaa
333231
232221
131211
=λ−
λ−λ−
Ausmultiplizieren führt auf die charakteristische Gleichung von A:
0AAA 322
13 =−λ+λ−λ
mit den Invarianten
( ) AA;aaaa21A;aA 3
3
1k,jkjjkkkjj2
3
1kkk1 =−== ∑∑
==
Beispiel 5-3 (n = 2)
0aaaa
2221
1211 =λ−
λ−
Ausmultiplizieren liefert die quadratische Gleichung:
( ) ( ) 0aaaaaa 1221221122112 =−+λ+−λ

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 47
Satz 5-9
Die Eigenwerte einer symmetrischen Matrix A (A = AT) sind reell.
Beispiel 5-4
Gesucht sind die Eigenwerte der symmetrischen Matrix
=
3223
A
Das charakteristische Polynom: 0562 =+λ−λ
hat die Lösungen: λ λ1 21 5= =; . Das sind die Eigenwerte von A.
Beispiel 5-5
Gesucht sind die Eigenvektoren der Matrix
=
3223
A .
Die Eigenwerte sind λ λ1 21 5= =; . Für den ersten Eigenwert λ1 1= ergibt sich folgendes
Gleichungssystem
0xx
132213
0xx
1001
3223
2
1
2
11
=
⋅
−−
=
⋅
λ−
also
0x2x20x2x2
21
21
=+=+
Wir wählen ∈= tx1 Ñ, dann folgt tx 2 −= . Damit ist jeder Vektor
−=
11
tx1 Eigenvektor
zu λ1 1= . Für den zweiten Eigenwert λ 2 5= erhalten wir entsprechend
0xx
532253
0xx
1001
3223
2
1
2
12
=
⋅
−−
=
⋅
λ−
also
0x2x20x2x2
21
21
=−=+−

48
Mit sx1 = beliebig reell folgt sx 2 = . Damit ist jeder Vektor
=
11
sx 2 Eigenvektor zu
λ 2 5= . Die auf den Betrag 1 normierten Eigenvektoren sind:
=
−=
11
21e;
11
21e 21
Satz 5-10
Die Eigenvektoren einer symmetrischen Matrix sind orthogonal.
Definition 5-5
Die n unabhängigen Eigenvektoren xi lassen sich in folgender Reihenfolge zu der regulären Matrix
( )n21 e,,e,eX …= ,
die Eigenvektormatrix oder auch Modalmatrix genannt wird, zusammenfassen.
Definition 5-6
Für die Modalmatrix gilt: Λ=⋅⋅− XAX 1 , wobei
( )ii
n
1n
2
1
Diag
00000000
λ=
λλ
λλ
=Λ−……
…
…
Diagonalmatrix der Eigenwerte genannt wird.
=
3223
A ;
=
−=
11
21e;
11
21e 21 ;
−=
−=
−= −
1111
21
21
21
21
2X;1111
21X 1 ;
λλ
=
=Λ=⋅⋅−
2
11
00
5001
XAX

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 49
6 Analysis
Definition 6-1
Unter einer Funktion f verstehen wir eine Vorschrift, die jedem Element x einer gegebenen Menge D genau ein Element y aus einer Menge W zuordnet. D heißt Definitionsbereich und W heißt Wertebereich. Schreibweise: f D W mit y f x: ( )→ =
Definition 6-2
Es sei f D W: → eine Funktion.
a) f ist geradsymmetrisch, wenn f(-x) = f(x) für alle x D∈ gilt. b) f ist ungeradsymmetrisch (punktsymmetrisch zum Ursprung), wenn f(-x) = -f(x) für alle
x D∈ gilt.
Definition 6-3
Es ist I ⊆ Ñ ein Intervall. Eine Funktion f: I W→ heißt a) monoton wachsend in I, wenn für alle x1 < x2 aus I gilt, daß f(x1) ≤ f(x2) ist b) streng monoton wachsend in I, wenn für alle x1 < x2 aus I gilt, daß f(x1) < f(x2) ist, c) monoton fallend in I, wenn für alle x1 < x2 aus I gilt, daß f(x1) ≥ f(x2) ist, d) streng monoton fallend in I, wenn für alle x1 < x2 aus I gilt, daß f(x1) > f(x2) ist.
Definition 6-4
Es ist I ⊆ Ñ ein Intervall. Eine Funktion f: I W→ heißt a) konvex in I, wenn ihr Graph mit größer werdenden x-Werten eine Linkskurve beschreibt, b) konkav in I, wenn ihr Graph mit größer werdenden x-Werten eine Rechtskurve beschreibt
Definition 6-5
Die Umkehrfunktion (inverse Funktion) 1f − ordnet jedem Element f(x) des Wertebereiches
W das Element x des Definitionsbereiches D zu.

50
Satz 6-1
Jede streng monotone Funktion besitzt ein Umkehrfunktion
Definition 6-6
Eine Funktion der Form
nn
2210 xaxaxaa)x(f ++++= … , 0a n ≠ ,
mit ai ∈ Ñ, n,,1,0i …= , fest, heißt ganze rationale Funktion oder Polynom vom
Gerade n.
Satz 6-2
Ein Polynom n-ten Grades hat genau n Nullstellen, d.h. Lösungen der Gleichung f x( ) = 0 .
Ist n ungerade, dann gibt es mindestens eine reelle Nullstelle.
Definition 6-7
Ist g(x) ein Polynom vom Grade n und h(x) ein Polynom vom Grade m > 0, dann heißt die Funktion
)x(h)x(g
xbxbxbbxaxaxaa
)x(f mm
2210
nn
2210 =
++++++++
=…
…
eine gebrochen rationale Funktion.
Satz 6-3
Der größtmögliche Definitionsbereich einer gebrochen rationalen Funktion ist
Dmax = R\x|h(x) = 0
Definition 6-8
Nullstellen des Nenners einer gebrochen rationalen Funktion, die nicht gleichzeitig Nullstellen des Zählers sind, heißen Pole.

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 51
Definition 6-9
Die Funktion f x ex( ) = heißt Exponentialfunktion. Sie ist auf definiert und
e = 2,718281... ist die Eulersche Zahl.
Definition 6-10
Die Umkehrfunktion von xe wird mit f x x( ) ln= bezeichnet. Sie heißt (natürliche) Loga-
rithmusfunktion und ist für x > 0 definiert.
Satz 6-4
Es sei ( ) ( ) ( )∞∈∞∈∞∈ ,0x,,0x,,0x 21 und ∈a , dann gilt:
a) 2121 xlnxln)xxln( +=
b) 212
1 xlnxlnxx
ln −=
c) xlna)xln( a =
Definition 6-11
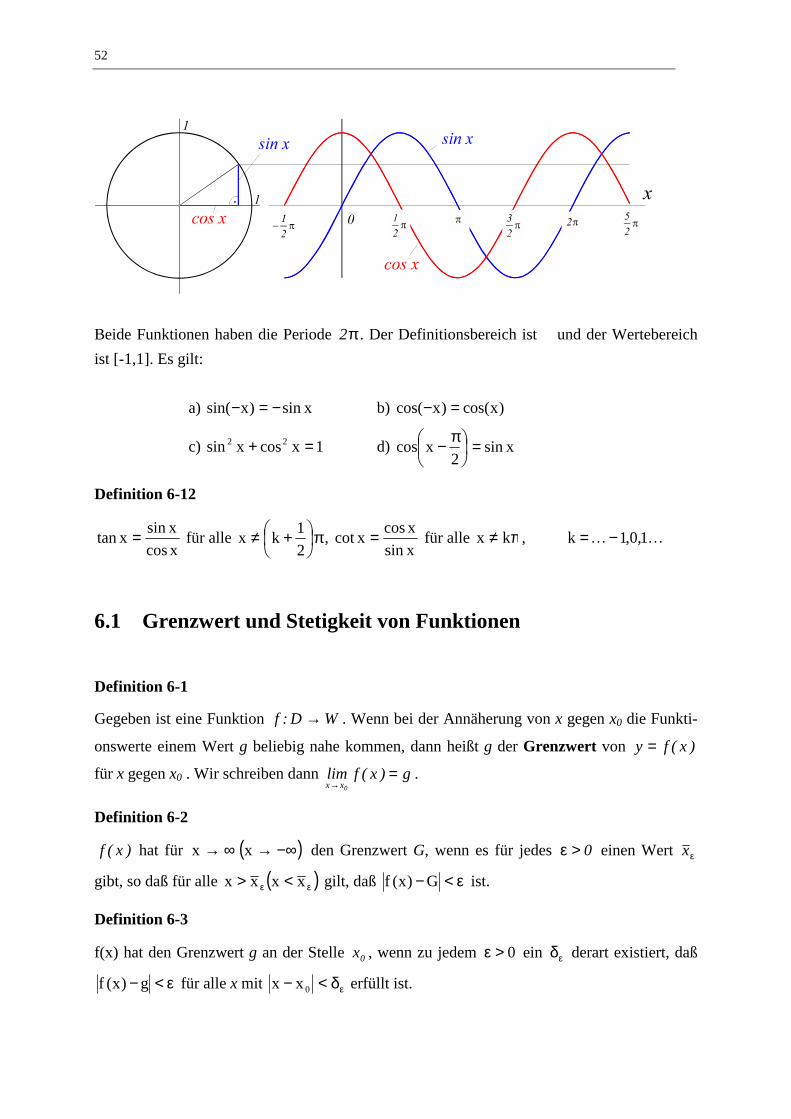
Der Sinus eines Winkels x wird am rechtwinkligen Dreieck erklärt als das Verhältnis von Gegenkathete zu Hypothenuse . Der Cosinus von x ist das Verhältnis von Ankathete zu Hypo-thenuse
hgxsin =
haxcos =
Am Einheitskreis werden diese Funktionen auf beliebige (im Bogenmaß gemessene) Winkel ausgedehnt.
52
Beide Funktionen haben die Periode 2π. Der Definitionsbereich ist Ñ und der Wertebereich ist [-1,1]. Es gilt:
a) xsin)xsin( −=− b) )xcos()xcos( =−
c) 1xcosxsin 22 =+ d) xsin2
xcos =
π−
Definition 6-12
xcosxsinxtan = für alle π
+≠21kx ,
xsinxcosxcot = für alle π≠ kx , …… 1,0,1k −=
6.1 Grenzwert und Stetigkeit von Funktionen
Definition 6-1
Gegeben ist eine Funktion f D W: → . Wenn bei der Annäherung von x gegen x0 die Funkti-
onswerte einem Wert g beliebig nahe kommen, dann heißt g der Grenzwert von y f x= ( )
für x gegen x0 . Wir schreiben dann lim ( )x x
f x g→
=0
.
Definition 6-2
f x( ) hat für ( )−∞→∞→ xx den Grenzwert G, wenn es für jedes ε > 0 einen Wert xε
gibt, so daß für alle ( )εε <> xxxx gilt, daß ε<−G)x(f ist.
Definition 6-3
f(x) hat den Grenzwert g an der Stelle x0 , wenn zu jedem 0>ε ein εδ derart existiert, daß
ε<−g)x(f für alle x mit εδ<− 0xx erfüllt ist.
Prof. Dr. F.U. Mathiak, HS Neubrandenburg 53
Definition 6-4
Es sei WD:f → eine Funktion und Dx 0 ∈ . Die Funktion f heißt stetig in x0, wenn
a) )x(flim0xx→
existiert und
b) ( )0xxxf)x(flim
0
=→
ist.
Die Funktion heißt stetig in D, wenn sie für alle Dx 0 ∈ stetig ist.
Satz 6-1
Für die elementaren Funktionen gilt: - Polynome sind stetig, - ex und xln sind stetig, - sin x und cos x sind stetig, - gebrochen rationale Funktionen sind stetig für alle x, für die das Nennerpolynom nicht
verschwindet.
Satz 6-2
Es sei die Funktion [ ]f a b W: , → stetig und es sei ( )f a > 0 und ( )f b < 0 [oder ( )f a < 0
und ( )f b > 0 ], dann existiert mindestens ein ( )x a b0 ∈ , mit ( )f x0 0= .
6.2 Ableitung von Funktionen einer unabhängigen Veränderli-chen
Definition 6-1
Sei I ∈ ein Intervall und x I0 ∈ : Als Differenzenquotient von f bezeichnen wir den Aus-druck
( ) ( )0
0
xxxfxf
−−
für 0xx ≠
Definition 6-2
Sei I ∈ Ñ ein Intervall und x I0 ∈ . Die Funktion f heißt differenzierbar in x0, wenn der
Grenzwert ( ) ( )
0
0
xx xxxfxf
lim0 −
−→
54
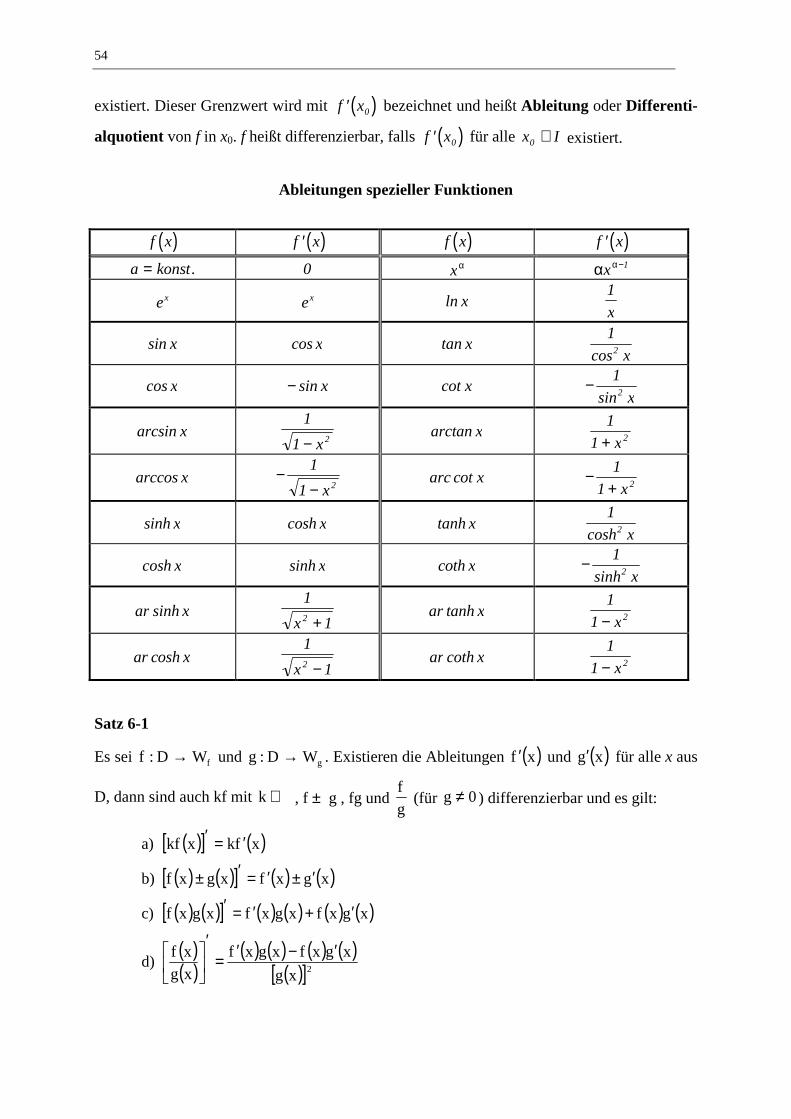
existiert. Dieser Grenzwert wird mit ( )′f x0 bezeichnet und heißt Ableitung oder Differenti-
alquotient von f in x0. f heißt differenzierbar, falls ( )′f x0 für alle x I0 ∈ existiert.
Ableitungen spezieller Funktionen
( )f x ( )′f x ( )f x ( )′f x
a konst= . 0 xα α αx −1
ex ex ln x 1x
sin x cos x tan x 1
2cos x
cos x − sin x cot x − 12sin x
arcsin x 1
1 2− x arctan x
11 2+ x
arccos x −−1
1 2x arc xcot −
+1
1 2x
sinh x cosh x tanh x 1
2cosh x
cosh x sinh x coth x − 12sinh x
ar xsinh 1
12x + ar xtanh
11 2− x
ar xcosh 1
12x − ar xcoth
11 2− x
Satz 6-1
Es sei fWD:f → und gWD:g → . Existieren die Ableitungen ( )xf ′ und ( )xg′ für alle x aus
D, dann sind auch kf mit ∈k Ñ, f ± g , fg und
gf
(für 0g ≠ ) differenzierbar und es gilt:
a) ( )[ ] ( )xfkxkf ′=′
b) ( ) ( )[ ] ( ) ( )xgxfxgxf ′±′=′±
c) ( ) ( )[ ] ( ) ( ) ( ) ( )xgxfxgxfxgxf ′+′=′
d) ( )( )
( ) ( ) ( ) ( )( )[ ]2xg
xgxfxgxfxgxf ′−′
=′

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 55
Satz 6-2
Sind f(x) und g(x) differenzierbar und kann g(x) in f(x) eingesetzt werden, dann ist auch f(g(x)) differenzierbar und es gilt
( )[ ] ( ) ( )xg)x(gf)x(gf ′′=′
Satz 6-3
Für die Ableitung der Umkehrfunktion 1f − an der Stelle ( )00 xfy = gilt
( ) ( ) ( )00
1
xf1yf′
=′−
Satz 6-4
Ist f differenzierbar in x0, dann ist f auch stetig in x0 .
Definition 6-3
Ist ( )′f x differenzierbar, dann heißt die Ableitung von ( )[ ] ( )xfxf:f ′′=′′′ zweite Ableitung
von f. Allgemein läßt sich schreiben ( ) ( )[ ] ( ) ( ) …,3,2n,xfxf n1n ==′−
Satz 6-5
Es sei D ⊆ und f D W: → eine Funktion. Es sei I D⊆ ein Intervall und f differenzierbar auf I. Dann gilt:
a) f ist genau dann monoton wachsend auf I, wenn für alle ( ) 0xfIx ≥′∈ ist.
b) f ist genau dann monoton fallend auf I, wenn für alle ( )x I f x∈ ′ ≤ 0 ist.
c) Ist ( )′ >f x 0 für alle x I∈ bis auf endlich viele x, dann ist f streng monoton wachsend
auf I. d) Ist ( )′ <f x 0 für alle x I∈ bis auf endlich viele x, dann ist f streng monoton fallend auf
I.
Satz 6-6
Es sei D ⊆ und f D W: → eine Funktion. Es sei I D⊆ ein Intervall und f zweimal diffe-renzierbar auf I. Dann gilt:
a) f ist genau dann konvex auf I, wenn ( )′′ >f x 0 für alle x I∈ (Linkskurve).
b) f ist genau dann konkav auf I, wenn ( )′′ <f x 0 für alle x I∈ (Rechtskurve).

56
6.3 Spezielle Anwendungen der Differentialrechnung
Definition 6-1
Unter dem (totalen, vollständigen) Differential einer differenzierbaren Funktion f D W: →
verstehen wir die Größe ( )dy f x dx= ′ für beliebige Zahlen (Zuwächse) dx.
Abb. 6-1 Linearer Zuwachs dy einer Funktion y(x)
Satz 6-1 (Regel von Bernoulli-L’Hospital)
Es sei D ⊆ ein Intervall und x D0 ∈ . Es seien f g D x W, : \ 0 → differenzierbare Funk-
tionen. Es gelte: ( ) ( )lim , lim ,x x x x
f x g x→ →
= =0 0
0 0 oder ( ) ( )lim , limx x x x
f x g x→ →
= ±∞ = ±∞0 0
.
Ferner sei ( )′ ≠g x 0 für x D∈ . Existiert dann der Grenzwert von ( )( )′′
f xg x
für x x→ 0 , dann
existiert auch der Grenzwert von ( )( )
f xg x
für x x→ 0 und es ist
( )( )
( )( )xgxflim
xgxflim
00 xxxx ′′
=→→

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 57
6.4 Extremwerte bei Funktionen einer Veränderlichen
Definition 6-1
Es sei D ⊆ und f D W: → eine Funktion. Ein Punkt x D0 ∈ heißt lokales (relatives) Maximum (Hochpunkt) von f [lokales(relatives)Minimum(Tiefpunkt) von f], wenn es eine Zahl h > 0 gibt mit
( ) ( )f x f x≤ 0 für alle x D∈ mit x h x x h0 0− < < +
[ ( ) ( )f x f x≥ 0 für alle x D∈ mit x h x x h0 0− < < + ]
Satz 6-1
Es sei f D W: → eine Funktion, die an einer inneren Stelle x D0 ∈ differenzierbar ist. Wenn
f in x0 einen Extremwert besitzt, dann gilt ( )′ =f x0 0 . (Notwendige Bedingung für ein Extre-
mum)
Definition 6-2
Es sei f D W: → eine differenzierbare Funktion, dann heißt jede Lösung der Gleichung
( )′ =f x 0
stationärer Punkt der Funktion f.
Satz 6-2
Es sei f D W: → eine differenzierbare Funktion.
a) (Notwendige Bedingung für einen inneren Extremwert)
Ist 0x ein innerer Extremwert, dann gilt ( )′ =f x0 0
b) (Hinreichende Bedingung für Hoch- oder Tiefpunkt)
(i) Es gilt ( )′ =f x0 0 und mit h > 0 gilt weiter
( )′ >f x 0 für x h x x0 0− < < und
( )′ <f x 0 für x x x h0 0< < +
dann hat f am Punkte x0 einen Hochpunkt.
(ii) Es gilt ( )′ =f x0 0 und mit h > 0 gilt weiter
58
( )′ <f x 0 für x h x x0 0− < < und
( )′ >f x 0 für x x x h0 0< < +
dann hat f am Punkte x0 einen Tiefpunkt.
c) (Hinreichende Bedingung für Hoch- oder Tiefpunkt)
Gilt ( )′ =f x0 0 und ( )′′ ≠f x0 0 , dann hat f an der Stelle 0x
(i) einen Hochpunkt (Maximum), wenn ( )′′ <f x0 0
(ii) einen Tiefpunkt (Minimum), wenn ( )′′ >f x0 0 ist.
Satz 6-3
Ist f D W: → eine differenzierbare Funktion, die in D konkav (konvex) verläuft, und die ei-
nen inneren Punkt x D0 ∈ mit ( )′ =f x0 0 hat, dann besitzt f in x0 ein globales Maximum
(Minimum).
Definition 6-3
Ein Punkt, in dem eine Rechts- und eine Linkskurve (oder eine Links- und eine Rechtskurve) ohne Knick ineinander übergehen, heißt Wendepunkt.
Satz 6-4
Es sei f D W: → eine mindestens dreimal differenzierbare Funktion. Gilt für einen inneren
Punkt x D0 ∈ ( )′′ =f x0 0 und ( )′′′ ≠f x0 0 , so ist x0 ein Wendepunkt von f.
6.5 Funktionen von mehreren Veränderlichen
Definition 6-1
Es sei n eine natürliche Zahl. Ist ⊆D , dann heißt eine Vorschrift WD:f → , die jedem
n-dimensionalen Vektor x D∈ genau ein Element Wy ∈ mit ⊆W zuordnet eine Funkti-
on mit n Veränderlichen (Variablen).

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 59
Definition 6-2
Es sei ⊆D , und WD:f → eine Funktion mit zwei Veränderlichen, ( )21 x,xfy = . Hö-
henlinien oder Niveaulinien sind die geometrischen Orte aller Punkte (x1,x2), für die yy =
konstant ist. Die Gleichung der Höhenlinie ist implizit gegeben durch ( ) 0yx,xf 21 =− .
Definition 6-3
f(x) ist homogen vom Grade r, wenn gilt: ( ) ( ) 0,xfxf r >λλ=λ .
Beispiel 6-1
( ) ( ) 22
2121 xxx,xfxf +== , ( ) ( ) ( ) ( ) ( )xfxxx,xfxf 22
22
121 λ=λ+λ=λλ=λ→ ,
d.h. f(x) ist homogen vom Grade 2
6.6 Partielle Ableitungen
Definition 6-1
Es sei D ⊆ und f D W: → und x D0 ∈ . Für ein i, 1 ≤ ≤i n heißt der Grenzwert (falls er existiert)
( ) ( )lim
, , , , , , , ,x x
i i n i i n
i ii i
f x x x x f x x x xx x−
− −−−0
10
10 0
10
10 0 0
0
… … … …
die i-te partielle Ableitung der Funktion im Punkte x0 . Für diese Ableitung schreiben wir
∂∂
fxi
oder f xi , i n= 1 2, , ,… . f heißt (partiell) differenzierbar, wenn f xi
für alle x D0 ∈ und
alle i n= 1 2, , ,… existiert.
Definition 6-2
Eine (partiell) differenzierbare Funktion mit n Veränderlichen besitzt n partielle Ableitungen (1. Ordnung). Jede dieser n partiellen Ableitungen ist wieder eine Funktion von n Veränderli-

60
chen. Sind diese Funktionen wieder differenzierbar, dann können wieder partielle Ableitungen (2. Ordnung, insgesamt n2) gebildet werden. Analog können partielle Ableitungen 3., 4. und höherer Ordnung gebildet werden.
Satz 6-1
Es sei D ⊆ und f D W: → eine Funktion mit z f x y= ( , ) . f sei zweimal partiell diffe-renzierbar. Sind die Ableitungen fxy und fyx stetig, so gilt
f x y f x yxy yx( , ) ( , )= für alle ( )x y D, ∈
Definition 6-3
Es sei D ⊆ und f D W: → mit y f x= ( ) . Das vollständige (totale) Differential von f ist gegeben durch
( )dy df x f dx f dx f dxx x x nn= = + + +
1 21 2 …
6.7 Extremwerte bei Funktionen von mehreren Veränderlichen
Satz 6-1
Es sei D ⊆ , x0 ein innerer Punkt von D und f D W: → sei partiell differenzierbar in
x0 . Wenn f in x0 einen Extremwert besitzt, dann gilt
( ) ( ) ( )f x f x f xx x xn1 2
0 0 0 0= = = =…
(Notwendige Bedingung für ein relatives Extremum)
Definition 6-1
Es sei D ⊆ und f D W: → eine partiell differenzierbare Funktion. Die Lösungen des Gleichungssystems
( ) ( ) ( )f x f x f xx x xn1 20 0 0= = =, , ,…
heißen stationäre Punkte.
Satz 6-2
(Hinreichende Bedingung für einen relativen Extremwert im Fall n = 2) Es sei D ⊆ und f D W: → mit z f x y= ( , ) eine Funktion mit stetigen partiellen Ablei-
tungen 2. Ordnung und ( )x y0 0, sei ein innerer Punkt aus D. Gilt

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 61
a) ( ) 0y,xf 00x = und ( ) 0y,xf 00y = und
b) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) 0y,xfy,xfy,xf
y,xfy,xfy,xfy,xf
:y,x 002xy00yy00xx
00yy00yx
00xy00xx00 >−==∆ ,
dann hat f an der Stelle ( )x y0 0, ein relatives Extremum.
Diese ist ein Maximum, falls ( )f x yxx 0 0 0, < ist und ein Minimum, falls ( )f x yxx 0 0 0, > ist.
Gilt dagegen a) und ( )∆ x y0 0 0, < , dann ist ( )x y0 0, kein Extremum, sondern es liegt ein Sat-
telpunkt vor.
Satz 6-3
(Hinreichende Bedingung für einen relativen Extremwert im Fall n > 2)
Es sei D ⊆ , f D W: → mit ( )y f x x xn= 1 2, , ,… eine Funktion mit stetigen partiellen
Ableitungen 2. Ordnung und x0 sei ein innerer Punkt aus D. Es gelte
a) ( ) ( ) ( )f x f x f xx x xn1 2
0 0 00 0 0= = =, , ,…
Gilt
b) ( )( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( )∆ i
x x x x x x
x x x x x x
x x x x x x
x
f x f x f x
f x f x f x
f x f x f x
i
i
i i i i
0
0 0 0
0 0 0
0 0 0
1 1 1 2 1
2 1 2 2 2
1 2
0= >
…
…
…
für alle i n= 1 2, , ,… , dann hat f an der Stelle x0 ein Minimum.
c) Gilt ( ) ( )− >1 00ii x∆ für alle i n= 1 2, , ,… , dann hat f an der Stelle x0 ein Maximum.
d) Ist ( )f xx xi i
0 0< und ( )f xx xj j
0 0> , 1 ≤ ≤i j n, , dann hat f an der Stelle x0 keinen Extrem-
wert.
( )∆ n x0 heißt Determinante der Hesse-Matrix von f im Punkt x0 .
62
6.8 Extremwerte bei Nebenbedingungen
Satz 6-1 (Lagrangesche Multiplikatorregel für n = 2)
Es sei D ⊆ und f D W: → eine partiell differenzierbare Funktion mit y f x x= ( , )1 2 und
die Nebenbedingung laute ( )g x x1 2 0, = .
Die notwendigen Bedingungen für relative Extremwerte von f unter der Nebenbedingung g ergeben sich als stationäre Punkte der Lagrangefunktion
( ) ( ) ( )L x x f x x g x xλ λ, , , ,1 2 1 2 1 2= +
λ heißt Lagrangemultiplikator. Es muss also folgendes Gleichungssystem gelöst werden
:L
:L:L
2
1
x
x
λ
( )
( ) ( )( ) ( ) 0x,xgx,xf
0x,xgx,xf0x,xg
21x21x
21x21x
21
22
11
=λ+
=λ+=
Hinreichende Bedingungen: Ist die Determinante der Hesse-Matrix von L am stationären Punkt positiv, so liegt ein Maxi-mum vor, ist sie negativ, dann liegt ein Minimum vor.
22122
21111
21
xxxxx
xxxxx
xx
LLLLLLLLL
H
λ
λ
λλλλ
=
Satz 6-2 (Lagrangesche Multiplikatorregel für n > 2)
Es sei D ⊆ und f D W: → eine partiell differenzierbare Funktion mit ( )y f x= und die
m(< n) Nebenbedingungen lauten ( ) ( ) ( )g x g x g xm1 20 0 0= = =, , ,… . Die notwendigen Be-
dingungen für relative Extremwerte von f unter den m Nebenbedingungen ergeben sich als stationäre Punkte der Lagrangefunktion
( ) ( ) ( )L x f x g xii
m
iλ λ, = +=∑
1
Zur Bestimmung der hinreichenden Bedingungen sind die Unterdeterminanten entlang der Hauptdiagonalen -beginnend mit der Ordnung 2m+1 - der Hesse Matrix von L.
=
λλ
λλλλλλ
λλλλλλ
nn1n2n1n
n2122212
n1112111
xxxxxx
xx
xx
LLLL
LLLLLLLL
H
……
……
……
an den stationären Punkten zu untersuchen.

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 63
Weisen die Unterdeterminanten alternierende Vorzeichen beginnend mit ( )− +1 1m auf, so liegt
ein Maximum vor.
Weisen die Unterdeterminanten alle ein einheitliches Vorzeichen gegeben durch ( )−1 m auf, so
liegt ein Minimum vor.
6.9 Integralrechnung
Definition 6-1
Es seien in einem Intervall ( )f x und ( )F x gegeben. Es sei ( )F x dort differenzierbar und es
sei dort stets
( ) ( )′ =F x f x .
Dann heißt ( )F x eine Stammfunktion oder ein unbestimmtes Integral von ( )f x und wird
mit
( )f x dx∫
bezeichnet.
Satz 6-1
Ist in einem Intervall ( )F x Stammfunktion (unbestimmtes Integral) von ( )f x , so hat jede
andere Stammfunktion von ( )f x die Form ( )F x + C mit C ∈ .
Satz 6-2
C(x)Fkdx(x)fkdx(x)fk i
n
1ii
n
1iii
n
1iii +== ∑∑ ∫∫∑
===
Satz 6-3
a) ( )[ ] ( ) ( )[ ] 1,Cxf1
1dxxfxf 1 −≠α++α
=′ +αα
∫
b) ( )( ) ( ) ( ) 0xf,Cxflndxxfxf ≠+=′
∫

64
Tabelle von Stammfunktionen
( )f x ( )F x ( )f x ( )F x
xα ( )11
11
ααα
++ ≠ −+x C 1
x ln ,x C x+ ≠ 0
ex e Cx + ln x ( )x x Cln − +1
sin x − +cos x C tan x − +ln cos x C cos x sin x C+ cot x ln sin x C+
arcsin x x x x Carcsin + − +1 2 arctan x ( ) Cx121xx 2 ++− lnarctan
arccos x x x x Carccos − − +1 2 arc xcot ( ) Cx121xarcx 2 +++ lncot
sinh x cosh x C+ tanh x Cx +coshln
cosh x sinh x C+ coth x ln sinh x C+
ar xsinh xar x x Csinh − + +2 1 ar xtanh ( )xar x x Ctanh ln+ − +12
1 2
ar xcosh xar x x Ccosh − − +2 1 ar xcoth ( )xar x x Ccoth ln+ − +12
12
Satz 6-4 (Partielle Integration oder Produktintegration)
( ) ( ) ( ) ( ) ( ) ( )f x g x dx f x g x f x g x dx∫ ∫′ = − ′
Satz 6-5 (Hauptsatz der Differential- u. Integralrechnung
Ist ( )f x in [ ]a b, stetig und ( )F x eine beliebige Stammfunktion von ( )f x , so gilt
( ) ( ) ( ) ( )aFbFxFdxxf b
a
b
a
−==∫
Satz 6-6
a) ( ) ( )dxxfdxxfa
b
b
a∫∫ −=
b) ( ) 0dxxfa
a
=∫

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 65
c) ( ) ( ) ( )dxxfdxxfdxxfb
c
c
a
b
a∫∫∫ += , bca <<
d) ( ) ( )[ ] ( ) ( )dxxfkdxxfkdxxfkxfkb
a22
b
a11
b
a2211 ∫∫∫ +=+
Definition 6-2
Ist ( )f x über jedem endlichen Intervall integrierbar, dann sind die uneigentlichen Integrale
von ( )f x bei Existenz folgender Grenzwerte definiert als:
a) ( ) ( )dxxflimdxxfb
uu
b
∫∫ −∞→∞−
=
b) ( ) ( )dxxflimdxxfu
au
a∫∫ ∞→
∞
=
c) ( ) ( ) ( )dxxflimdxxflimdxxft
ct
c
uu ∫∫∫ ∞→−∞→
∞
∞−
+= für beliebiges c.

66
7 Komplexe Zahlen
Definition 7-1
Komplexe Zahlen1 sind Ausdrücke der Form
iyxz += (x, y ∈ Ñ)
Das Symbol i bedeutet die imaginäre Einheit: 1i2 −= ( ∉i Ñ). Es sind x der Realteil und y der Imaginärteil der komplexen Zahl z
( ) ( )zImy;zRex == ;
( ) ( )zImizRez +=
Ist speziell y = 0, dann wird mit 0ixz ⋅+= die reelle Zahl x identifiziert; ist x = 0 und 0y ≠ ,
dann ist iyiy0z =+= eine rein imaginäre Zahl.
Definition 7-2
Zwei komplexe Zahlen 111 iyxz += und 222 iyxz += sind nur dann einander gleich
2211 yixyix +=+
wenn 21 xx = und 21 yy = gilt, also Real- und Imaginärteil je für sich gleich sind.
Definition 7-3
Die zu iyxz += konjugiert komplexe Zahl z wird definiert durch:
yixz −=
Damit sind: a) ( ) ( )zRezRe = ;
b) ( ) ( )zImzIm −=
c) ∈⇔= zzz Ñ d) zz =
e) 2121 zzzz +=+
1 Geronimo Cardano, latinisiert Hieronymus Cardanus, italien. Mathematiker, Arzt u. Philosoph, 1501-1576

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 67
Definition 7-4
Der Betrag von z wird definiert durch: zzyxz 22 =+=
Definition 7-5
Die Summe 21 zz + der beiden komplexen Zahlen 111 iyxz += und 222 iyxz += ist die
komplexe Zahl: )yy(i)xx(zzz 212121 +++=+=
Beispiel 7-1
i41z;i23z 21 −=+= → i62zz;i24zz 2121 +=−−=+
Definition 7-6
Das Produkt 21zz zweier komplexer Zahlen 111 iyxz += und 222 iyxz += ist die komplexe
Zahl: ( ) ( )2121212121 xyyxiyyxxzzz ++−==
Damit sind:
a) 0yxzz 22 ≥+=
b) 2121 zzzz =
Beispiel 7-2
i23z1 += ; i41z2 −= ; 10i11i8i2i123)i41)(i23(zz 221 −=−+−=−+=
1323zz 2211 =+=
Definition 7-7 (Division komplexer Zahlen)
Unter der Voraussetzung 0z2 ≠ suchen wir diejenige Zahl z, für die bei vorgelegter Zahl z1
gilt: 12 zzz = . Erweiterung mit 2z liefert 2122 zzzzz =
22
22
212122
22
2121
22
21
2
1
yxyxxy
iyx
yyxxzzzz
zz
z+−
+++
===
68
Beispiel 7-3
i23z1 += ; i41z2 −=
( )( )( )( ) i
1714
175
17i145
161i8i2i123
i41i41i41i23
i41i23
zz 2
2
1 +−=+−=+
+++=+−++=
−+=
Definition 7-8
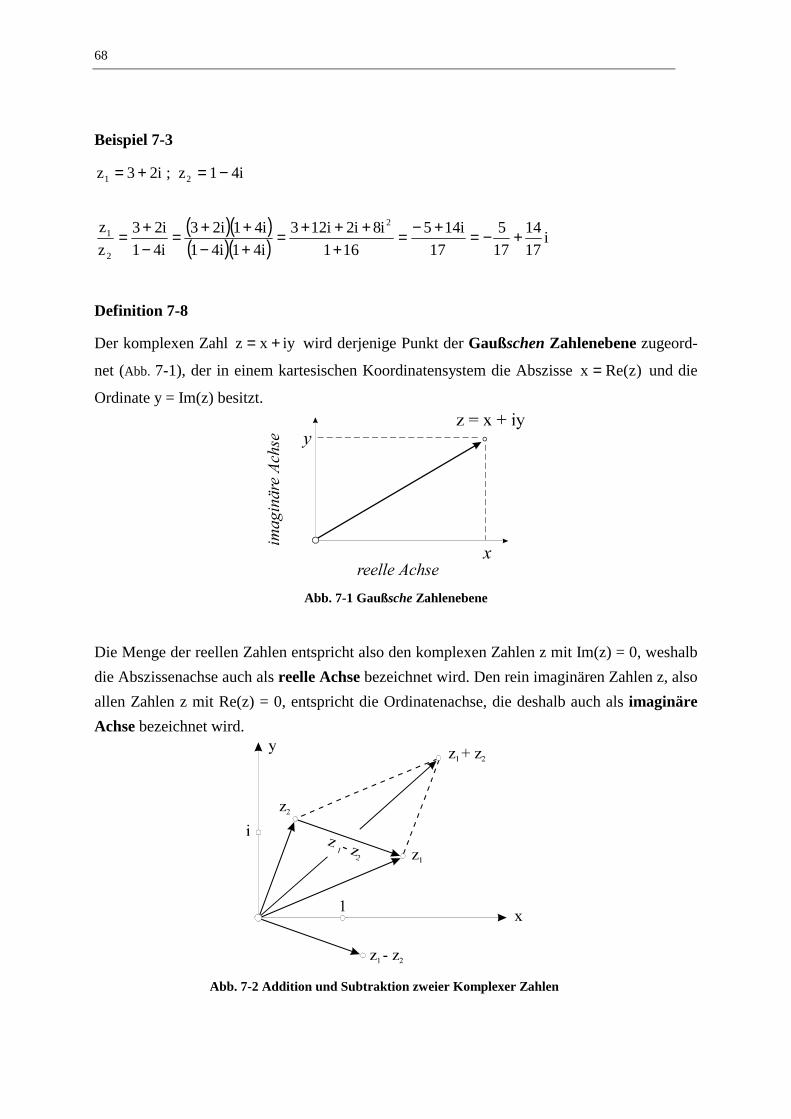
Der komplexen Zahl iyxz += wird derjenige Punkt der Gaußschen Zahlenebene zugeord-
net (Abb. 7-1), der in einem kartesischen Koordinatensystem die Abszisse )zRe(x = und die
Ordinate y = Im(z) besitzt.
Abb. 7-1 Gaußsche Zahlenebene
Die Menge der reellen Zahlen entspricht also den komplexen Zahlen z mit Im(z) = 0, weshalb die Abszissenachse auch als reelle Achse bezeichnet wird. Den rein imaginären Zahlen z, also allen Zahlen z mit Re(z) = 0, entspricht die Ordinatenachse, die deshalb auch als imaginäre Achse bezeichnet wird.
Abb. 7-2 Addition und Subtraktion zweier Komplexer Zahlen
Prof. Dr. F.U. Mathiak, HS Neubrandenburg 69
Hinweis: Oftmals ist es zweckmäßig, in der komplexen Ebene statt des beschriebenen Punk-tes, den Vektor-Pfeil zu betrachten, der vom Nullpunkt zum betrachteten Punkt hinweist (Ortsvektor). Bei dieser Betrachtungsweise addieren sich zwei komplexe Zahlen wie die Kräf-te in einem Kräfteparallelogramm. Die Differenz zweier komplexer Zahlen hat dann die Län-ge und Richtung der zweiten Diagonalen im Paralleleogramm (Abb. 7-2). Der Zahl i entspricht der Punkt (0,1) der imaginären Achse und die Zahl 1 dem Punkt (1,0) der reellen Achse. In der Geometrie der Ebene ist es üblich, neben den kartesischen Koordina-ten, auch Polarkoordinaten zu benutzen. Ein Punkt in der Ebene wird dann beschrieben durch
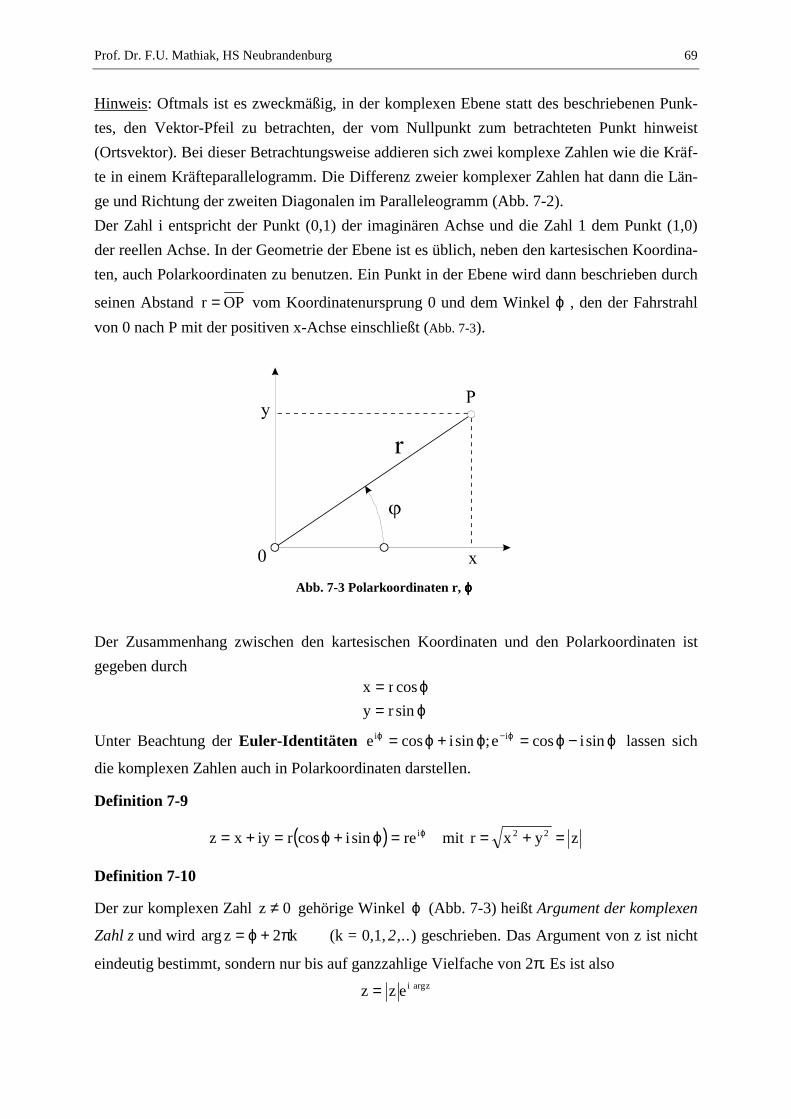
seinen Abstand OPr = vom Koordinatenursprung 0 und dem Winkel ϕ , den der Fahrstrahl von 0 nach P mit der positiven x-Achse einschließt (Abb. 7-3).
Abb. 7-3 Polarkoordinaten r, ϕϕϕϕ
Der Zusammenhang zwischen den kartesischen Koordinaten und den Polarkoordinaten ist gegeben durch
ϕ=ϕ=
sinrycosrx
Unter Beachtung der Euler-Identitäten ϕ−ϕ=ϕ+ϕ= ϕ−ϕ sinicose;sinicose ii lassen sich
die komplexen Zahlen auch in Polarkoordinaten darstellen.
Definition 7-9
( ) ϕ=ϕ+ϕ=+= iresinicosriyxz mit zyxr 22 =+=
Definition 7-10
Der zur komplexen Zahl 0z ≠ gehörige Winkel ϕ (Abb. 7-3) heißt Argument der komplexen
Zahl z und wird k2zarg π+ϕ= (k = 0,1, 2,..) geschrieben. Das Argument von z ist nicht
eindeutig bestimmt, sondern nur bis auf ganzzahlige Vielfache von 2π. Es ist also zargiezz =
70
Hinweis: Mit den obigen Definitionen ist eine geometrische Interpretation der Multiplikation und der Division komplexer Zahlen möglich. Es gilt nämlich für die beiden komplexen Zah-len z1 und z2:
21 zargi22
zargi11 ezz,ezz ==
dann gilt für das Produkt 21 zz ⋅ einerseits )zzarg(i
212121ezzzz ⋅⋅=⋅
und andererseits )zargz(argi
21zargi
2zargi
1212121 ezzezezzz +⋅=⋅=⋅
Daraus folgt
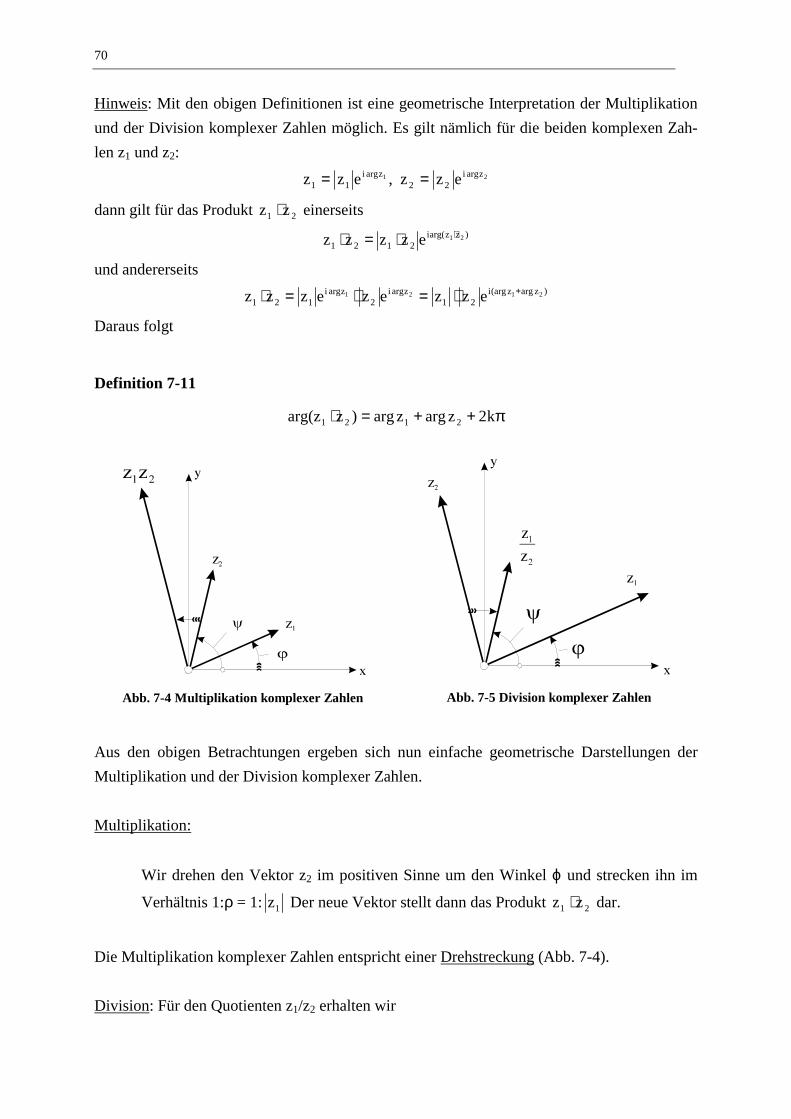
Definition 7-11
π++=⋅ k2zargzarg)zzarg( 2121
Abb. 7-4 Multiplikation komplexer Zahlen
Abb. 7-5 Division komplexer Zahlen
Aus den obigen Betrachtungen ergeben sich nun einfache geometrische Darstellungen der Multiplikation und der Division komplexer Zahlen. Multiplikation:
Wir drehen den Vektor z2 im positiven Sinne um den Winkel ϕ und strecken ihn im
Verhältnis 1:ρ = 1: 1z Der neue Vektor stellt dann das Produkt 21 zz ⋅ dar.
Die Multiplikation komplexer Zahlen entspricht einer Drehstreckung (Abb. 7-4). Division: Für den Quotienten z1/z2 erhalten wir

Prof. Dr. F.U. Mathiak, HS Neubrandenburg 71
)zargz(argi
2
1
2
1 21ezz
zz −=
Dieses Ergebnis deuten wir wie folgt:
Drehen wir den Vektor z2 im negativen Sinne um den Winkel ϕ und strecken ihn im Verhältnis ρ:1, so erhalten wir den Vektor z = z1/z2 (Abb. 7-5)
Definition 7-12
Aus zargiezz = erhalten wir für die n-te Potenz von z: zargninn ezz ⋅⋅= und es gilt:
π+= k2)zarg(n)zarg( n
Bezeichnen wir die Lösungen von wz n = generell mit n wz = , dann folgt
nk2)warg(
n1)warg(n π+=
)1n,,1,0k(eww nik2)warg(
ni
nn −==π
+…
Hinweis: Es genügt, wenn wir uns auf die Werte 1n,,1,0k −= … beschränken, da wir für die
anderen Werte Zk ∈ periodisch immer wieder dieselben komplexen Zahlen erhalten.
Beispiel 7-4
Insbesondere erhalten für w = 1 die n-ten Einheitswurzeln
)1n,,1,0k(n
k2sinin
k2cose1 nik2
n −=π+π==π
…
Abb. 7-6 Sechste Einheitswurzeln
Sie bilden geometrisch die Eckpunkte eines n-Ecks. Das n-Eck hat stets den auf der reellen Achse gelegenen Punkt 1z0 = zur Ecke. Alle
Eckpunkte 1n10 z,,z,z −… genügen der Glei-
chung
01x n =− die Kreisteilungsgleichung genannt wird, weil die Lösungsmenge den Umfang des Ein-heitskreises in n gleiche Teile teilt.




![Mikrofiltrationssysteme für die Lebensmittel- und ... · Nominale Rückhalte [μm]*t era * Die nominalen Rückhalten der Fert a erschichilt en sind rt ela. Die tativ tsächlichen](https://static.fdocument.org/doc/165x107/5e22a309e55250048f374160/mikrofiltrationssysteme-fr-die-lebensmittel-und-nominale-rckhalte-mt.jpg)